电动车无刷控制器硬件电路详解
电动车无刷控制器原理图

电动车无刷控制器原理图(mc33033) 2007/05/04 01:0048V500W有刷电摩控制器电原理图2007/05/15 17:13几款有刷电动自行车控制器2007/05/14 03:51伟星有刷电机控制器图片看不清者,可以右键另存为在本机上查看一款带继电器的有刷电机控制器ZKC3615MZ有刷电机控制器新旭WMB型24V280W有刷电机控制器电动车充电器原理及维修常用电动车充电器根据电路结构可大致分为两种。
第一种是以u c3842驱动场效应管的单管开关电源,配合LM358双运放来实现三阶段充电方式。
其电原理图和元件参数见图表1点击图片在新窗口查看清晰大图图表1工作原理:220v交流电经T0双向滤波抑制干扰,D1整流为脉动直流,再经C11滤波形成稳定的300V左右的直流电。
U1 为TL3842脉宽调制集成电路。
其5脚为电源负极,7脚为电源正极,6脚为脉冲输出直接驱动场效应管Q1(K1358) 3脚为最大电流限制,调整R25(2.5欧姆)的阻值可以调整充电器的最大电流。
2脚为电压反馈,可以调节充电器的输出电压。
4脚外接振荡电阻R1,和振荡电容C1。
T1为高频脉冲变压器,其作用有三个。
第一是把高压脉冲将压为低压脉冲。
第二是起到隔离高压的作用,以防触电。
第三是为uc3842提供工作电源。
D4为高频整流管(16A60V)C10为低压滤波电容,D5为12V稳压二极管, U3(TL431)为精密基准电压源,配合U2(光耦合器4N35) 起到自动调节充电器电压的作用。
调整w2(微调电阻)可以细调充电器的电压。
D10是电源指示灯。
D6为充电指示灯。
R27是电流取样电阻(0.1欧姆,5w)改变W1的阻值可以调整充电器转浮充的拐点电流(200-300 mA)通电开始时,C11上有300v左右电压。
电动车无刷控制器电路图[高清]
![电动车无刷控制器电路图[高清]](https://img.taocdn.com/s3/m/f4134a0b5acfa1c7aa00ccd7.png)
今以应用最广泛的以PIC16F72为智能控制中心,350W的整机电路为例,整机电路如图1:(原文件名:1.gif)图1:350W整机电路图整机电路看起来很复杂,我们将其简化成框图再看看:(原文件名:2.gif)图2:电路框图电路大体上可以分成五部分:一、电源稳压,供应部分;二、信号输入与预处理部分;三、智能信号处理,控制部分;四、驱动控制信号预处理部分;五、功率驱动开关部分。
下面我们先来看看此电路最核心的部分:PIC16F72组成的单片机智能处理、控制部分,因为其他电路都是为其服务或被其控制,弄清楚这部分,其它电路就比较容易明白。
(原文件名:3.gif)图3:PIC16F72在控制器中的各引脚应用图我们先来简单介绍一下PIC16F72的外部资源:该单片机有28个引脚,去掉电源、复位、振荡器等,共有22个可复用的IO口,其中第13脚是CCP1输出口,可输出最大分辨率达10BIT的可调PWM信号,另有AN0-AN4共5路AD模数转换输入口,可提供检测外部电路的电压,一个外部中断输入脚,可处理突发事件。
内部软件资源我们在软件部分讲解,这里并不需要很关心。
各引脚应用如下:1:MCLR复位/烧写高压输入两用口2:模拟量输入口:放大后的电流信号输入口,单片机将此信号进行A-D转换后经过运算来控制PWM的输出,使电流不致过大而烧毁功率管。
正常运转时电压应在0-1.5V左右3:模拟量输入口:电源电压经分压后的输入口,单片机将此信号进行A-D转换后判断电池电压是否过低,如果低则切断输出以保护电池,避免电池因过放电而损坏。
正常时电压应在3V以上4:模拟量输入口:线性霍尔组成的手柄调速电压输入口,单片机根据此电压高低来控制输出给电机的总功率,从而达到调整速度的目的。
5:模拟/数字量输入口:刹车信号电压输入口。
可以使用AD转换器判断,或根据电平高低判断,平时该脚为高电平,当有刹车信号输入时,该脚变成低电平,单片机收到该信号后切断给电机的供电,以减少不必要的损耗。
电动车无刷控制器电路图(高清)

今以应用最广泛的以PIC16F72为智能控制中心,350W的整机电路为例,整机电路如图1 :(原文件名:1.gif)图1:350W 整机电路图整机电路看起来很复杂,我们将其简化成框图再看看:(原文件名:2.gif)图2:电路框图种旌用制肌抽输扎 ©卫再想罟输入电路大体上可以分成五部分:一、 电源稳压,供应部分;二、 信号输入与预处理部分;三、 智能信号处理,控制部分;四、 驱动控制信号预处理部分;五、 功率驱动开关部分。
下面我们先来看看此电路最核心的部分: PIC16F72组成的单片机智能处理、控 制部分,因为其他电路都是为其服务或被其控制, 弄清楚这部分,其它电路就比 较容易明白。
唯丿;机冲沖I「心 7\ 电從放嵐部井 『朕世述*扎剧喉输入PtC'l4FT2(原文件名:3.gif )图3:PIC16F72在控制器中的各引脚应用图我们先来简单介绍一下PIC16F72的外部资源:该单片机有28个引脚,去掉电 源、复位、振荡器等,共有22个可复用的IO 口,其中第13脚是CCP1输出口, 可输出最大分辨率达10BIT 的可调PWM 信号,另有AN0-AN4共5路AD 模数 转换输入口,可提供检测外部电路的电压,一个外部中断输入脚,可处理突发事 件。
内部软件资源我们在软件部分讲解,这里并不需要很关心。
各引脚应用如下:I : MCLR 复位/烧写高压输入两用口2:模拟量输入口:放大后的电流信号输入口,单片机将此信号进行 A-D 转换后 经过运算来控制PWM 的输出,使电流不致过大而烧毁功率管。
正常运转时电压 应在0-1.5V 左右 3:模拟量输入口:电源电压经分压后的输入口,单片机将此信号进行 A-D 转换 后判断电池电压是否过低,如果低则切断输出以保护电池,避免电池因过放电而 损坏。
正常时电压应在3V 以上4 :模拟量输入口:线性霍尔组成的手柄调速电压输入口,单片机根据此电压高 低来控制输出给电机的总功率,从而达到调整速度的目的。
电动车无刷控制器电路图(高清)精编版
今以应用最广泛的以PIC16F72为智能控制中心,350W的整机电路为例,整机电路如图1:(原文件名:1.gif)图1:350W整机电路图整机电路看起来很复杂,我们将其简化成框图再看看:(原文件名:2.gif)图2:电路框图电路大体上可以分成五部分:一、电源稳压,供应部分;二、信号输入与预处理部分;三、智能信号处理,控制部分;四、驱动控制信号预处理部分;五、功率驱动开关部分。
下面我们先来看看此电路最核心的部分:PIC16F72组成的单片机智能处理、控制部分,因为其他电路都是为其服务或被其控制,弄清楚这部分,其它电路就比较容易明白。
(原文件名:3.gif)图3:PIC16F72在控制器中的各引脚应用图我们先来简单介绍一下PIC16F72的外部资源:该单片机有28个引脚,去掉电源、复位、振荡器等,共有22个可复用的IO口,其中第13脚是CCP1输出口,可输出最大分辨率达10BIT的可调PWM信号,另有AN0-AN4共5路AD模数转换输入口,可提供检测外部电路的电压,一个外部中断输入脚,可处理突发事件。
内部软件资源我们在软件部分讲解,这里并不需要很关心。
各引脚应用如下:1:MCLR复位/烧写高压输入两用口2:模拟量输入口:放大后的电流信号输入口,单片机将此信号进行A-D转换后经过运算来控制PWM的输出,使电流不致过大而烧毁功率管。
正常运转时电压应在0-1.5V左右3:模拟量输入口:电源电压经分压后的输入口,单片机将此信号进行A-D转换后判断电池电压是否过低,如果低则切断输出以保护电池,避免电池因过放电而损坏。
正常时电压应在3V以上4:模拟量输入口:线性霍尔组成的手柄调速电压输入口,单片机根据此电压高低来控制输出给电机的总功率,从而达到调整速度的目的。
5:模拟/数字量输入口:刹车信号电压输入口。
可以使用AD转换器判断,或根据电平高低判断,平时该脚为高电平,当有刹车信号输入时,该脚变成低电平,单片机收到该信号后切断给电机的供电,以减少不必要的损耗。
智能无刷电动车控制器接线图电动车控制器维修

智能无刷电动车控制器接线图电动车控制器维修
下图所示的是高标科技自主研发的电动车控制器接线图:
高标电动车控制器接线方式:
1.电动车控制器电源输入:粗红色线为电源正端,黑色线为电源负端,细橙色线为电门锁。
2.电动车电机相位(u,v,w 输出):粗黄线为U,粗绿线为V,粗蓝色为W。
3.电动车控制器转把型号输入:细红色线为+5V电源,细绿色为手柄信号输入,细黑色线为接地线。
4.电动车电机霍尔(A,B,C输入):细红色线为+5V电源,细黑色线为接地线,细黄色线为A,细绿色线为B,细蓝色线为C。
5.电动车刹车(柔性EABS+机械刹):细黄色线为柔性EABS,细蓝色线为机械刹,细黑色线为接地线。
6.电动车传感器:细红色线为+5V电源,细黑色线为接地线,细绿色线为传感器信号输入。
7.电动车仪表(转速):细紫色线。
8.电动车巡航:细棕色线。
9.电动车限速:细灰色线。
10.电动车自动识别开关线:细黄色线。
电动车无刷电机控制器硬件电路详解

图 1:350W 整机电路图
整机电路看起来很复杂,我们将其简化成框图再看看:
图 2:电路框图 电路大体上可以分成五部分: 一、电源稳压,供应部分; 二、信号输入与预处理部分; 三、智能信号处理,控制部分; 四、驱动控制信号预处理部分; 五、功率驱动开关部分。 下面我们先来看看此电路最核心的部分:PIC16F72 组成的单片机智能处理、控制部分,因为其他电路都是为其服务或被其控制,弄清楚这部分,其它电路就比较容易明白。
图 3:PIC16F72 在控制器中的各引脚应用图 我们先来简单介绍一下 PIC16F72 的外部资源:该单片机有 28 个引脚,去掉电源、复位、振荡器等,共有 22 个可复用的 IO 口,其中第 13 脚是 CCP1 输 出口,可输出最大分辨率达 10BIT 的可调 PWM 信号,另有 AN0-AN4 共 5 路 AD 模数转换输
第三组电源是 5V,由 LM78L05 提供,由于 78L05 提供 的最大电流只有 100mA,所以另并联了两个 1.5K 的电阻以扩流,同时也分担一部分功耗。在整个系统中,对 5V 电源的要求比较高,不单单是因为逻辑电 路,MCU 等的电源电压都不能过 高,而且由于 MCU 的所有 AD 转换都是以 5V 电压为基准,所以当 5V 不准时会出现电流,欠压值,手柄控制等均不能达到设计 要求的情况,甚至不能动作,因此该电压的范围应被严格限制在 4.90-5.10V 之间。
同步续流的实现 1.倒向,截波与死区控制, 电路见图 10
图 10:倒向,死区发生器.略
单片机产生的 PWM 占空比信号一路通过与门,经 R53,R52,C71 截波(缩小占空比)后输出,相位不变,截波量大约为 1.5μS,形成 PWM 信号,此路 输出至上桥驱动,与上桥逻辑开关信号相与后驱动上桥 MOSFET。另一路经 R57 和 C24,反相 器 U5A 移相,相移量大约 750nS,再经 U5B 反相,形 成 PWM-信号,最后合成至下桥驱动。此时两个信号输出时相位相同,但 PWM-信号占空比比 PWM 信号占空比大 1.5μS,但由于 PWM-信号已经偏移 750nS,所以 PWM 信号刚好套在 PWM-信号中 间,两边空出 750nS 作为 MOSFET 开关的死区。
「图解」电动车无刷电机控制器驱动电路图
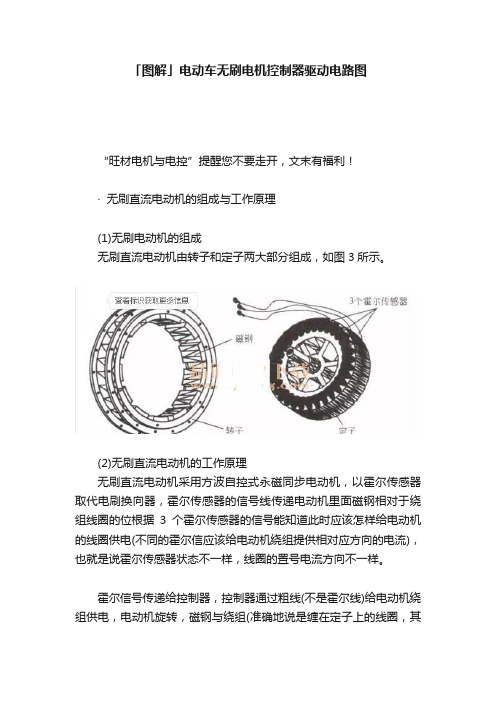
「图解」电动车无刷电机控制器驱动电路图“旺材电机与电控”提醒您不要走开,文末有福利!·无刷直流电动机的组成与工作原理(1)无刷电动机的组成无刷直流电动机由转子和定子两大部分组成,如图3所示。
(2)无刷直流电动机的工作原理无刷直流电动机采用方波自控式永磁同步电动机,以霍尔传感器取代电刷换向器,霍尔传感器的信号线传递电动机里面磁钢相对于绕组线圈的位根据3个霍尔传感器的信号能知道此时应该怎样给电动机的线圈供电(不同的霍尔信应该给电动机绕组提供相对应方向的电流),也就是说霍尔传感器状态不一样,线圈的置号电流方向不一样。
霍尔信号传递给控制器,控制器通过粗线(不是霍尔线)给电动机绕组供电,电动机旋转,磁钢与绕组(准确地说是缠在定子上的线圈,其实霍尔一般安装在定子上)发生转动,霍尔传感器感应出新的位置信号,控制器粗线又给重新改变电流方向的电动机绕组供电,电动机继续旋转(当绕组和磁钢的位置发生变化时,绕组必须对应地改变电流方向,这样电动机才能继续向一个方向运动,否则电动机就会在某一个位置左右摆动,而不是连续旋转),这个过程就是电子换向。
无刷直流电动机由直流电源供电,借助位置传感器来检测转子的位置,所检测出的信号触发相应的电子换相线路,以实现无接触式换相。
无刷直流电动机用电子开关和位置传感器代替电刷及换向器,将直流电转换成模拟三相交流电,通过调制脉宽,改变其电流大小来改变转速。
直流无刷电机的控制结构直流无刷电机是同步电机的一种,也就是说电机转子的转速受电机定子旋转磁场的速度及转子极数(P)影响:N=120.F/P。
在转子极数固定情况下,改变定子旋转磁场的频率就可以改变转子的转速。
直流无刷电机即是将同步电机加上电子式控制(驱动器),控制定子旋转磁场的频率并将电机转子的转速回授至控制中心反复校正,以期达到接近直流电机特性的方式。
也就是说直流无刷电机能够在额定负载范围内当负载变化时仍可以控制电机转子维持一定的转速。
电动车无刷控制器电路图(高清)资料

今以应用最广泛的以PIC16F72为智能控制中心,350W的整机电路为例,整机电路如图1:(原文件名:1.gif)图1:350W整机电路图整机电路看起来很复杂,我们将其简化成框图再看看:(原文件名:2.gif)图2:电路框图电路大体上可以分成五部分:一、电源稳压,供应部分;二、信号输入与预处理部分;三、智能信号处理,控制部分;四、驱动控制信号预处理部分;五、功率驱动开关部分。
下面我们先来看看此电路最核心的部分:PIC16F72组成的单片机智能处理、控制部分,因为其他电路都是为其服务或被其控制,弄清楚这部分,其它电路就比较容易明白。
(原文件名:3.gif)图3:PIC16F72在控制器中的各引脚应用图我们先来简单介绍一下PIC16F72的外部资源:该单片机有28个引脚,去掉电源、复位、振荡器等,共有22个可复用的IO口,其中第13脚是CCP1输出口,可输出最大分辨率达10BIT的可调PWM信号,另有AN0-AN4共5路AD模数转换输入口,可提供检测外部电路的电压,一个外部中断输入脚,可处理突发事件。
内部软件资源我们在软件部分讲解,这里并不需要很关心。
各引脚应用如下:1:MCLR复位/烧写高压输入两用口2:模拟量输入口:放大后的电流信号输入口,单片机将此信号进行A-D转换后经过运算来控制PWM的输出,使电流不致过大而烧毁功率管。
正常运转时电压应在0-1.5V左右3:模拟量输入口:电源电压经分压后的输入口,单片机将此信号进行A-D转换后判断电池电压是否过低,如果低则切断输出以保护电池,避免电池因过放电而损坏。
正常时电压应在3V以上4:模拟量输入口:线性霍尔组成的手柄调速电压输入口,单片机根据此电压高低来控制输出给电机的总功率,从而达到调整速度的目的。
5:模拟/数字量输入口:刹车信号电压输入口。
可以使用AD转换器判断,或根据电平高低判断,平时该脚为高电平,当有刹车信号输入时,该脚变成低电平,单片机收到该信号后切断给电机的供电,以减少不必要的损耗。
电动车无刷马达控制器硬件电路详解
电动车无刷马达控制器硬件电路详解本文以PIC16F72为智能控制中心,350W的整机电路为例,整机电路如图图1:350W整机电路图整机电路看起来很复杂,我们将其简化成框图再看看:图2:电路框图电路大体上可以分成五部分:一、电源稳压,供应部分;二、信号输入与预处理部分;三、智能信号处理,控制部分;四、驱动控制信号预处理部分;五、功率驱动开关部分。
下面我们先来看看此电路最核心的部分:PIC16F72组成的单片机智能处理、控制部分,因为其他电路都是为其服务或被其控制,弄清楚这部分,其它电路就比较容易明白。
图3:PIC16F72在控制器中的各引脚应用图我们先来简单介绍一下PIC16F72的外部资源:该单片机有28个引脚,去掉电源、复位、振荡器等,共有22个可复用的IO口,其中第13脚是CCP1输出口,可输出最大分辨率达10BIT 的可调PWM信号,另有AN0-AN4共5路AD模数转换输入口,可提供检测外部电路的电压,一个外部中断输入脚,可处理突发事件。
内部软件资源我们在软件部分讲解,这里并不需要很关心。
字串1各引脚应用如下:1:MCLR复位/烧写高压输入两用口2:模拟量输入口:放大后的电流信号输入口,单片机将此信号进行A-D转换后经过运算来控制PWM的输出,使电流不致过大而烧毁功率管。
正常运转时电压应在0-1.5V左右3:模拟量输入口:电源电压经分压后的输入口,单片机将此信号进行A-D转换后判断电池电压是否过低,如果低则切断输出以保护电池,避免电池因过放电而损坏。
正常时电压应在3V以上4:模拟量输入口:线性霍尔组成的手柄调速电压输入口,单片机根据此电压高低来控制输出给电机的总功率,从而达到调整速度的目的。
5:模拟/数字量输入口:刹车信号电压输入口。
可以使用AD转换器判断,或根据电平高低判断,平时该脚为高电平,当有刹车信号输入时,该脚变成低电平,单片机收到该信号后切断给电机的供电,以减少不必要的损耗。
6:数字量输入口:1+1助力脉冲信号输入口,当骑行者踏动踏板使车前行时,该口会收到齿轮传感器发出的脉冲信号,该信号被单片机接收到后会给电机输出一定功率以帮助骑行者更轻松地往前走。
电动自行车无刷控制器电路原理分析

该控制器由CPU(PIC16F72)、2片74HC27(3输入或非门)、1片74HCO4D(反相器)、1片74HCO8D(双输入与门)和1片LM358(双运放)、6只大功率场效应管等组成,功率达350W,是一款比较典型的无刷电动车控制器,具有600和120°驱动模式自动切换功能。
根据实物绘出其电路图,如图所示。
该控制器由CPU(PIC16F72)、2片74HC27(3输入或非门)、1片74HCO4D(反相器)、1片74HCO8D(双输入与门)和1片LM358(双运放)、6只大功率场效应管等组成,功率达350W,是一款比较典型的无刷电动车控制器,具有600和120°驱动模式自动切换功能。
电路组成及工作原理该电路分为电源电路,信号输入与预处理、智能信号处理控制,驱动控制信号功率驱动开关等三部分。
CPU(PIC16F72)单片机是智能处理控制部分的核心。
PIC16F72的引脚功能描述见304页图中所注。
1.电源电路该控制器有三组电源。
第一组是提供总能源的电池。
板子上的电解电容C1(1OOO μF/63V)、C11(1OOμF/63V)及C1O(μF/63V)用于消除由电源线、电路板走线所带来的电阻、寄生电感等引起的杂波干扰。
由于是工作在大电流、高频率、高温状态下,对电解电容有损耗角小、耐高温的要求,普通的电解电容容易发热爆裂。
第二组电源提供15V电压,一是给场效应管供电,由于场效应管必须有1OV以上、20V以下的电压才能很好地导通,所以必须有合适的电压为其供电,同时15V电压也为5V 稳压块提供预稳压。
稳压块为LM317,输出15V。
由于LM317的输入输出压差不能超过40V,而输入电压(电池电压)可能高达60V,因此在LM317前面加了一只330Ω/2W的电阻。
第三组电源是5V,稳压块采用LM78LO5,由于78LO5的最大输出电流只有1OOmA,所以并联了两只Ω的电阻R75、R76,以扩流。
无刷电动车控制器接线说明

+12V) • 细黑色线为接地线(低电平刹车)
6. 传感器
• 细红色线为+5V电源 • 细黑色线为接地线 • 细绿色线为传感器信号输
其他
• 7. 仪表(转速):细紫色线 • 8. 巡航:细棕色线 • 9. 限速:细灰色线 • 10.自动识别开关线:细黄色线
• 4,还有两个线,它们可以互相连接在一起的,那可以调节角度。 (60度和120度)
• 5,三跟主相线,5跟细的(和电机里面霍尔连接的) 再具体说下连 接办法! 第一个,注意好正负极就可以了! 第二个,需要调试不可 能一次成功的。(随便乱接) 第三个,需要根据经验找到,先排除其 他的线的作用,! 第四个,一般最后调试不出来,就可以考虑是电机 和控制器角度问题了! 第五个,控制器和电机有严格的匹配关系,需 要慢慢调试。 哎,没有修过电动车肯定是接不出来的,无刷的有点难 度! 相信有刷的你可以搞定! 还有的就是控制器和电机就算型号一 样(假如都是48V300W)也是有可能装上去没有作用的! 主要是电 机霍尔不匹配! 建议你装个无霍尔控制器! 注意正负极千万别接错! 其他都可以接错
• 粗黄色线为U
ቤተ መጻሕፍቲ ባይዱ
•
粗绿色线为V
• 粗蓝色线为W
3. 转把信号输入
• 细红色线为+5V电源 • 细绿色为手柄信号输入 • 细黑色线为接地线
4. 电机霍耳(A、B、C输入)
• 细红色线为+5V电源 • 细黑色线为接地线 • 细黄色线为 A • 细绿色线为 B • 细蓝色线为 C
5. 刹车(柔性EABS+机械刹)
无刷电动车控制器接线说明
无刷电动车控制器接线说明
无刷电动车控制器接线说明

无刷电动车控制器接线说明
无刷电动车控制器接线说明
无刷电动车控制器接线说明
1.电源输入
粗红色线为电源正端黑色线为电源负端细橙色线为电门锁
2.电机相位(u、v、w输出)
粗黄色线为U 粗绿色线为V 粗蓝色线为W
3.转把信号输入
细红色线为+5V电源细绿色为手柄信号输入细黑色线为接地线
4.电机霍耳(A、B、C输入)
细红色线为+5V电源细黑色线为接地线
细黄色线为 A 细绿色线为 B 细蓝色线为 C
5.刹车(柔性EABS+机械刹)
细黄色线为柔性EABS;细蓝色线为机械刹(高电平刹车:+12V)细黑色线为接地线(低电平刹车)
6.传感器
细红色线为+5V电源细黑色线为接地线细绿色线为传感器信号输入
7.仪表(转速):细紫色线
8.巡航:细棕色线
9.限速:细灰色线
10.自动识别开关线:细黄色线。
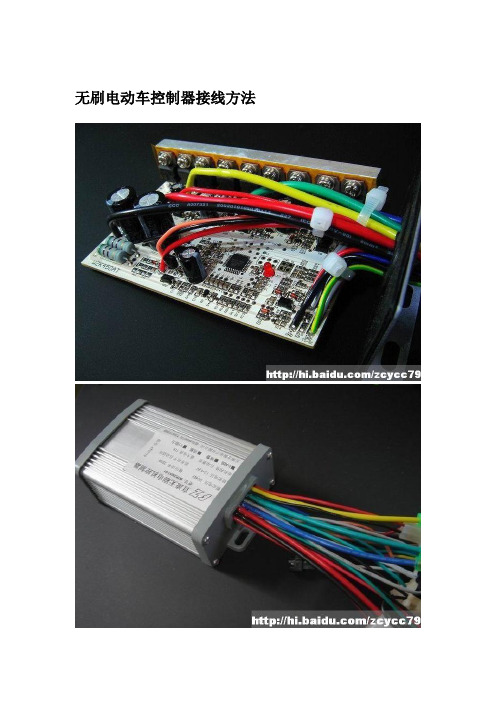
无刷电动车控制器接线方法(配图)
无刷电动车控制器接线方法(配图)-CAL-FENGHAI.-(YICAI)-Company One1无刷电动车控制器接线方法(配图)——程国锦2345无刷电动车控制器接线说明 1.电源输入粗红色线为电源正端黑色线为电源负端细橙色线为电门锁2.电机相位(u、v、w输出)粗黄色线为U 粗绿色线为V 粗蓝色线为W 3.转把信号输入细红色线为+5V电源细绿色为手柄信号输入细黑色线为接地线 4.电机霍耳(A、B、C输入)细红色线为+5V电源细黑色线为接地线细黄色线为 A 细绿色线为 B 细蓝色线为 C 5.刹车(柔性EABS+机械刹)细黄色线为柔性EABS;细蓝色线为机械刹(高电平刹车:+12V)细黑色线为接地线(低电平刹车) 6.传感器细红色线为+5V电源细黑色线为接地线细绿色线为传感器信号输入 7.仪表(转速):细紫色线 8.巡航:细棕色线9.限速:细灰色线10.自动识别开关线:细黄色线PIC16F72智能型无刷电动车控制器使用方法和注意事项 1、在接线前先切断电源,按接线图所示连接各根导线; 2、该控制器应安装在通风、防水、防震部位。
3、控制器限速控制插头应放置容易操作的地方。
4、控制器接插件应接插到位,禁止将控制器电源正负极反接(即严禁粗红、细橙和粗黑;细红和细黑接反)。
5、电机模式自动识别:正确接好电动车控制器的电源、转把、刹把等线束,,将电机识别模式开关线(细黄)短接,打开电门锁,使电机进入自动识别状态,若电机反转则按一下刹车即可使电机正向转动,在控制器识别电机模式10秒后将电机识别模式开关线(细黄)直6接断开即可完成电机模式自动识别。
6、1+1助力方向调整:在通电状态,将调速电阻从最大值调到最小值,再回到原始状态后,可将1+1助力的方向从正向模式切换到反向模式,再调整一次可从反向模式切换到正向模式,并将最终的模式存入单片机。
7。
电路识图73-电动车控制器电路详解
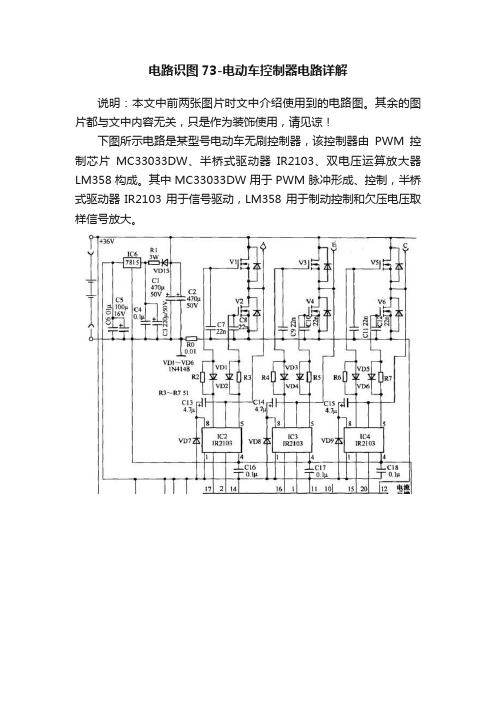
电路识图73-电动车控制器电路详解说明:本文中前两张图片时文中介绍使用到的电路图。
其余的图片都与文中内容无关,只是作为装饰使用,请见谅!下图所示电路是某型号电动车无刷控制器,该控制器由PWM控制芯片MC33033DW、半桥式驱动器IR2103、双电压运算放大器LM358构成。
其中MC33033DW用于PWM脉冲形成、控制,半桥式驱动器IR2103用于信号驱动,LM358用于制动控制和欠压电压取样信号放大。
一、15V供电电路15V供电电路的核心元器件是C1~C6、D15、R1、三端稳压器IC6(7815)、锁开关。
接通锁开关后,36V蓄电池盒输出的电压通过C1和C2滤波后,第一路为功率管供电;第二路为蓄电池欠电压保护电路供电;第三路通过防反接二极管D15隔离、R1限流、C3和C4滤波后,加到IC6的供电端,经它稳压输出15V电压,经C5、C6滤波后不仅为IC1~IC5供电,而且通过取样后为IC5提供参考电压。
二、激励脉冲电路激励脉冲电路的核心元器件是IC1,R9,C22,R10。
由电源电路产生的15V电压加到IC1的14脚,为它的内部基准电压形成电路等电路供电,它内部的基准电压形成电路产生的V基准电压从7脚输出,通过R10限流得到5V电压。
5V电压不仅为电动机内的霍尔集成电路和转把内的霍尔集成电路供电,而且为它内部的振荡器、PWM脉冲形成等电路供电。
IC1内的振荡器得到供电后,与8脚外接的定时元件R9、C22通过振荡产生锯齿波脉冲,该脉冲作为触发信号控制PWM脉冲形成电路(RS触发器)产生三个高端驱动脉冲和三个低端驱动脉冲,低端驱动脉冲从IC1的1脚、2脚、20脚输出,高端驱动脉冲从15脚~17脚输出。
三、驱动电路电动机三相驱动绕组驱动电路的核心元器件是三块半桥式放大器IC2~IC4(IR2103)由于三路绕组驱动电路构成相同,所以下面以IC2为核心构成的驱动电路为例进行介绍。
由IC1的2脚和17脚输出的低端激励信号和高端激励信号经IC2内的缓冲放大器放大,再经半桥式功率放大器放大后从5脚和7脚输出。
电动车无刷控制器电路图(高清)
今以应用最广泛的以PIC16F72为智能控制中心,350W的整机电路为例,整机电路如图1:(原文件名:1.gif)图1:350W整机电路图整机电路看起来很复杂,我们将其简化成框图再看看:(原文件名:2.gif)图2:电路框图电路大体上可以分成五部分:一、电源稳压,供应部分;二、信号输入与预处理部分;三、智能信号处理,控制部分;四、驱动控制信号预处理部分;五、功率驱动开关部分。
下面我们先来看看此电路最核心的部分:PIC16F72组成的单片机智能处理、控制部分,因为其他电路都是为其服务或被其控制,弄清楚这部分,其它电路就比较容易明白。
(原文件名:3.gif)图3:PIC16F72在控制器中的各引脚应用图我们先来简单介绍一下PIC16F72的外部资源:该单片机有28个引脚,去掉电源、复位、振荡器等,共有22个可复用的IO口,其中第13脚是CCP1输出口,可输出最大分辨率达10BIT的可调PWM信号,另有AN0-AN4共5路AD模数转换输入口,可提供检测外部电路的电压,一个外部中断输入脚,可处理突发事件。
内部软件资源我们在软件部分讲解,这里并不需要很关心。
各引脚应用如下:1:MCLR复位/烧写高压输入两用口2:模拟量输入口:放大后的电流信号输入口,单片机将此信号进行A-D转换后经过运算来控制PWM的输出,使电流不致过大而烧毁功率管。
正常运转时电压应在0-1.5V左右3:模拟量输入口:电源电压经分压后的输入口,单片机将此信号进行A-D转换后判断电池电压是否过低,如果低则切断输出以保护电池,避免电池因过放电而损坏。
正常时电压应在3V以上4:模拟量输入口:线性霍尔组成的手柄调速电压输入口,单片机根据此电压高低来控制输出给电机的总功率,从而达到调整速度的目的。
5:模拟/数字量输入口:刹车信号电压输入口。
可以使用AD转换器判断,或根据电平高低判断,平时该脚为高电平,当有刹车信号输入时,该脚变成低电平,单片机收到该信号后切断给电机的供电,以减少不必要的损耗。
无刷电动车控制器接线方法剖析
无刷电动车控制器接线方法无刷电动车控制器接线说明1.电源输入粗红色线为电源正端黑色线为电源负端细橙色线为电门锁2.电机相位(u、v、w输出)粗黄色线为U 粗绿色线为V 粗蓝色线为W 3.转把信号输入细红色线为+5V电源细绿色为手柄信号输入细黑色线为接地线4.电机霍耳(A、B、C输入)细红色线为+5V电源细黑色线为接地线细黄色线为 A 细绿色线为 B 细蓝色线为 C5.刹车(柔性EABS+机械刹)细黄色线为柔性EABS;细蓝色线为机械刹(高电平刹车:+12V)细黑色线为接地线(低电平刹车)6.传感器细红色线为+5V电源细黑色线为接地线细绿色线为传感器信号输入7.仪表(转速):细紫色线8.巡航:细棕色线9.限速:细灰色线10.自动识别开关线:细黄色线PIC16F72智能型无刷电动车控制器使用方法和注意事项1、在接线前先切断电源,按接线图所示连接各根导线;2、该控制器应安装在通风、防水、防震部位。
3、控制器限速控制插头应放置容易操作的地方。
4、控制器接插件应接插到位,禁止将控制器电源正负极反接(即严禁粗红、细橙和粗黑;细红和细黑接反)。
5、电机模式自动识别:正确接好电动车控制器的电源、转把、刹把等线束,,将电机识别模式开关线(细黄)短接,打开电门锁,使电机进入自动识别状态,若电机反转则按一下刹车即可使电机正向转动,在控制器识别电机模式10秒后将电机识别模式开关线(细黄)直接断开即可完成电机模式自动识别。
6、1+1助力方向调整:在通电状态,将调速电阻从最大值调到最小值,再回到原始状态后,可将1+1助力的方向从正向模式切换到反向模式,再调整一次可从反向模式切换到正向模式,并将最终的模式存入单片机。
更多关于电动车维修请点击下面的链接电动车整车电气原理图电动机车故障维修手册电动车检测仪制作电动车综合检测仪制作电动车故障维修资料电动车三合一喇叭接线图电动车电机霍尔更换图解电动车维修电动车维修技术电动车故障维修无刷电机相角的判断无刷电机的接线方法电动车报警器(防盗器)的接法无刷电动车不能行走的故障检修控制器限流的检测方法怎样检测电机的霍尔好坏控制器缺相的检测电动车空载电流的测法怎样检测无刷控制器好坏无刷控制器的原理与维修无刷控制器好坏的测量方法无刷电动车控制器接线方法电动车闪光器电路图电动车电源转换器电路图电动车电源转换器接法电动车控制器维修电动车仪表维修电动车充电器维修三档变速控制器接线方法有刷电动车不能行走的故障检修电动车线路图大全#电动车故障维修电工特种操作证全国各省安全监督厅官方网砋:北京市:/Zs/TzZy.aspx?nav=2天津市:/tj/index.html#上海市:/tzzy/重庆市:/Backstage/chaxun.aspx河北省:http://110.249.219.99:7700/RS22/pub/pubQuery.jsp山西省:/list/?136_1.html辽宁省:/zscx.html吉林省:http://221.8.56.235/db/tyzs.asp黑龙江省:/app/dataquery/index.jsp江苏省:http://58.213.157.106/zjcx/zgzscx.aspx浙江省:/安徽省:/views/template/cx/110104010103.htm 福建省:/tzzy_sel.aspx?t=&name=&idcard=江西省:/affair/200.aspx山东省:http://61.142.209.43:81/SearchCertificate.asp河南省:/cxxt/index.htm湖北省:/sample/CardSearch.asp湖南省:/zjcx/广东省:/海南省:暂无四川省:http://118.122.114.164:8069/QuerySys/Query.aspx贵州省:/bsdt/xgbssx/grbs/tzzy/index.shtml云南省:/aprz/inc/search.asp陕西省:/mainindex.do?method=getMenusForWebServicePage&type=1甘肃省:/index.html青海省:/广西壮族自治区:/Error.html内蒙古自治区:/西藏自治区:/宁夏回族自治区:/file/index.html新疆维吾尔自治区:/以上是各省级安监局官网查询电工特种操作证的真实网址.各位网友可以根据自己所发证件归属省份进入相应的省级安监局查询.其中部分网址因为特殊地区无法查询.请谅解.电工入网操作证(国家能源局电力监管局)南方监管局::8085/cas/login(验证省份包括:广东广西贵州去南海南深圳)华东监管局:http://220.248.24.213/load.loadPage.d?page=index.xml&siteCode=dzfwpt (验证省份包括:上海江苏浙江安徽福建)目前只收集了南方与华东两所监管局含九省两市查询网址.华北,华中,西北,东北暂无.敬请谅解.与此同时.向吧主和吧管申请加精置顶.在此先行铭谢.。
电动车控制器接线原理图

无刷电动车控制器接线说明1.电源输入粗红色线为电源正端黑色线为电源负端细橙色线为电门锁2.电机相位(u、v、w输出)粗黄色线为U 粗绿色线为V 粗蓝色线为W3.转把信号输入细红色线为+5V电源细绿色为手柄信号输入细黑色线为接地线4.电机霍耳(A、B、C输入)细红色线为+5V电源细黑色线为接地线细黄色线为A 细绿色线为B 细蓝色线为C5.刹车(柔性EABS+机械刹)细黄色线为柔性EABS;细蓝色线为机械刹(高电平刹车:+12V)细黑色线为接地线(低电平刹车)6.传感器细红色线为+5V电源细黑色线为接地线细绿色线为传感器信号输入7.仪表(转速):细紫色线8.巡航:细棕色线9.限速:细灰色线10.自动识别开关线:细黄色线PIC16F72智能型无刷电动车控制器使用方法和注意事项1、在接线前先切断电源,按接线图所示连接各根导线;2、该控制器应安装在通风、防水、防震部位。
3、控制器限速控制插头应放置容易操作的地方。
4、控制器接插件应接插到位,禁止将控制器电源正负极反接(即严禁粗红、细橙和粗黑;细红和细黑接反)。
5、电机模式自动识别:正确接好电动车控制器的电源、转把、刹把等线束,,将电机识别模式开关线(细黄)短接,打开电门锁,使电机进入自动识别状态,若电机反转则按一下刹车即可使电机正向转动,在控制器识别电机模式10秒后将电机识别模式开关线(细黄)直接断开即可完成电机模式自动识别。
6、1+1助力方向调整:在通电状态,将调速电阻从最大值调到最小值,再回到原始状态后,可将1+1助力的方向从正向模式切换到反向模式,再调整一次可从反向模式切换到正向模式,并将最终的模式存入单片机。
控制器线:红粗是正极,黑粗是负极,红细是转把5V正极,黑细是负极,绿色是信号线,你看看你的转把线是不是没有接好,红细5V正极和绿色是信号线两个相碰看看电机转吗?如果转动就是转把线你的转把黑线断了。
电动车控制器怎么接线1,分清楚每根线的作用,给控制供电的电源线(一般三根线用一个朔料插销弄在一起,其中最粗的两根是给控制器供电的、红+级、黑的-级,还一根细的红色的是电源锁线)2,转把(控制速度的),一般是三根细线、红、蓝、黑。
电动车无刷控制器硬件电路解释

电动车无刷控制器硬件电路解释电动车无刷控制器是电动车中十分重要的一个部件,它控制电动机转速和转向,在电动车上的作用类似于汽油车中的发动机控制器。
电动车无刷控制器的硬件电路是其实现的重要组成部分,本文将对其硬件电路进行解释。
一、电动车无刷控制器的基础构成电动车无刷控制器的硬件电路主要包括电源电路、CPU控制电路、电机驱动电路以及各种传感器电路等基础构成,下面将对这些构成进行简单介绍:(一)电源电路:负责将电动车电池的高电压(通常超过48V)转化成控制器需要的供电电压。
(二)CPU控制电路:负责控制整个控制器的工作,例如控制转速和转向,还可以控制车灯、闪光器等其他设备。
(三)电机驱动电路:负责控制电动机的启停、转速和转向等,其核心是半导体功率器件,例如功率MOSFET管,在进行电锁相检测和驱动电动车电机的同时,它也负责对电动车电机的电流进行实时调节,保障电动车电机部件在工作之间不受过载的损坏。
(四)传感器电路:包括了各种检测传感器,用于检测电动车运行状态,包括电池电压、电动车行驶速度、温度、电流等参数。
其中,电流传感器是检测电动车电池、控制器和电机之间的电流状态的重要传感器。
二、电动车无刷控制器的硬件电路实现电动车无刷控制器的硬件电路实现是依靠硬件电路上各部分的协调完成的。
其中,CPU控制电路是控制整个控制器的核心,其实现的基础是控制算法,在控制电路的设计和实现过程中,需要按照电动车运行控制的要求来编写控制算法,例如PID控制算法、电流控制算法等。
电动车无刷控制器的基本控制模式是PWM(脉宽调制),其通过调整PWM的占空比来实现电动车电机的转速控制。
PWM控制的实现需要在CPU控制电路中集成DC/DC转换器电路,在运行过程中逐渐改变PWM的占空比,从而控制电机的转速。
电动车无刷控制器还需要一套完整的保护系统,其包括了过流保护、过压保护、缺相保护、过温保护等各种保护设备。
这些设备一方面保障了电动车无刷控制器和电动车电机的安全工作,另一方面也保障了电动车的客车和司机乘坐的安全。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
电动车无刷马达控制器硬件电路详解2008-5-10 9:47:25电动车无刷电机是目前最普及的电动车用动力源,无刷电机长寿,免维护的特点得到广泛应用,然而由于其使用直电刷,其换向控制相对有刷电机要复杂许多,同时由于电动又使用电池作电源,因此控制器自身的保护及对电机,电器提出更多要求。
自电动车用无刷电动机问世以来,其控制器发展分两个阶用专用无刷电动机控制芯片为主组成的纯硬件电路控制器单,其中控制芯片的代表是摩托罗拉的MC33035,这个不以也不作深入介绍。
第二阶段是以MCU为主的控制芯片。
的重点,在MCR版本的设计中,揉和了模拟、数字、大功等许多重要应用,结合MCU智能化控制,是一个非常有启今以应用最广泛的以PIC16F72为智能控制中心,350W的机电路如图1:图1:350W整机电路图整机电路看起来很复杂,我们将其简化成框图再看看:图2:电路框图电路大体上可以分成五部分:一、电源稳压,供应部分;二、信号输入与预处理部分;三、智能信号处理,控制部分;四、驱动控制信号预处理部分;五、功率驱动开关部分。
下面我们先来看看此电路最核心的部分:PIC16F72组成的控制部分,因为其他电路都是为其服务或被其控制,弄清路就比较容易明白。
图3:PIC16F72在控制器中的各引脚应用图我们先来简单介绍一下PIC16F72的外部资源:该单片机电源、复位、振荡器等,共有22个可复用的IO口,其中输出口,可输出最大分辨率达10BIT的可调PWM信号,另路AD模数转换输入口,可提供检测外部电路的电压,一个可处理突发事件。
内部软件资源我们在软件部分讲解,这里各引脚应用如下:1:MCLR复位/烧写高压输入两用口2:模拟量输入口:放大后的电流信号输入口,单片机将换后经过运算来控制PWM的输出,使电流不致过大而烧毁时电压应在0-1.5V左右3:模拟量输入口:电源电压经分压后的输入口,单片机转换后判断电池电压是否过低,如果低则切断输出以保护过放电而损坏。
正常时电压应在3V以上4:模拟量输入口:线性霍尔组成的手柄调速电压输入口压高低来控制输出给电机的总功率,从而达到调整速度的5:模拟/数字量输入口:刹车信号电压输入口。
可以使用或根据电平高低判断,平时该脚为高电平,当有刹车信号低电平,单片机收到该信号后切断给电机的供电,以减少6:数字量输入口:1+1助力脉冲信号输入口,当骑行者时,该口会收到齿轮传感器发出的脉冲信号,该信号被单电机输出一定功率以帮助骑行者更轻松地往前走。
7:模拟/数字量输入口:由于电机的位置传感器排列方法高低决定适合于哪种电机,目前市场上常见的有所谓120机。
有的控制器还可以根据该口的电压高低来控制起动时合不同的力度需求。
8:单片机电源地。
9:单片机外接振荡器输入脚。
10:单片机外接振荡器反馈输出脚。
11:数字输入口:功能开关112:数字输入口:功能开关213:数字输出口:PWM调制信号输出脚,速度或电流由其宽度控制。
14:数字输入口:功能开关315、16、17:数字输入口:电机转子位置传感器信号输入信号变化决定让电机的相应绕组通电,从而使电机始终向这个信号上面讲过有120°和60°之分,这个角度实际上相位之差,120°就是和三相电一样,每个相位和前面的60°就是相差60°。
18:数字输出口:该口控制一个LED指示灯,大部分厂商故障情况显示,当控制器有重大故障时该指示灯闪烁不同故障类型以方便生产、维修。
19:单片机电源地。
20:单片机电源正。
上限是5.5V。
21:数字输入口:外部中断输入,当电流由于意外原因突范围时,该口有低电平脉冲输入。
单片机收到此信号时产的输出,从而保护重要器件不致损坏或故障不再扩大。
22:数字输出口:同步续流控制端,当电流比较大时,该制其后逻辑电路,使同步续流功能开启。
该功能在后面详23--28:数字输出口:是功率管的逻辑开关,单片机根据器的信号,由这里输出三相交流信号控制功率MOSFET开使电机正常运转。
有了智能化的控制中心,就需要有其它电路来为其服务,始介绍。
一、电源部分见图4:控制器有三组电源,第一组当然是提供总能源的电池,板C1:1000μF,63V)C11:47μF,63V及C13,C33:0.1μF63V 消除由于电源线、电路板走线所带来的电阻、寄生电感等由于工作在大电流、高频率、高温状态下,特别对电解电高温的要求,普通的电解电容容易发热爆裂。
第二组电源提供12-15V的电压,这组电压主要提供给M 由于场效应管的驱动要求比较特殊,必须有10V以上20V 好导通,所以必须有合适的电压供给,同时该组电压也为供预稳压。
这组电压由LM317提供,输出大约13.5V。
由出压差不能超过40V,而输入电压可能高达60V,因此在前2W的电阻,既预先降压,又替317分担了一部分功耗。
第三组电源是5V,由LM78L05提供,由于78L05提供的最所以另并联了两个1.5K的电阻以扩流,同时也分担一部统中,对5V电源的要求比较高,不单单是因为逻辑电路压都不能过高,而且由于MCU的所有AD转换都是以5V电5V不准时会出现电流,欠压值,手柄控制等均不能达到甚至不能动作,因此该电压的范围应被严格限制在4.90二、信号输入与预处理部分这部分电路包括电源电压输入、工作电流比较,放大输入电机转子位置传感器的霍尔信号输入、刹车信号输入及各号输入等。
1.电源电压输入:由于MCU只接受0-5V的信号,所以电压才能输入MCU。
2.工作电流放大、输入:电路如图5图5:略U3A是一个放大电路,它将康铜丝R55采样过来的电流信送入单片机。
最早的设计在R23上并联了一个0.1μF的器,后来为了更好地实时检测电流,将该电容去掉,这样流的实际变化基本一致以便MCU采样值更接近于实际值。
U3B是一个比较器接法,实际也是一个比较器,正常时的比较器翻转,当电流由于某种原因突然增大到一定程度,触发单片机的外部中断,单片机就会完全关闭电机的输出免故障进一步扩大。
这里有人会问,为什么放大器的放大倍数取得这么小,如点的话,单片机经过AD转换后的数字相对比较大,分辨率何乐而不为呢?这种想法是有道理的,但是限于LM358的15KHZ(PWM的工作频率大约为15.6K)的方波经358放大之我们目前对电流峰值的采样应当采取梯形波的上边,如果形波的上边就会变得很窄而使单片机采样困难,甚至采样梯形波的斜边,因而不能正确反映电流的实际大小,这就紊乱。
所以宁愿放大倍数取小点以保证采样位置的准确无图6:略3.手柄输入部分:手柄输出的电压范围在1.2-4.2V的范波后输入到单片机处理。
手柄需要一个5V的电源才能工图7:略4.电机转子位置传感器输入部分:由于该传感器安装在电输出的办法,所以除提供5V电源外,每个传感器都必须其输出的信号进行阻容滤波以抗干扰,同时在电源处接二铜膜做保险丝,防止电机相线与霍尔信号线短路后高电压上别的零件。
图8:略5.刹车信号输入:由于刹车信号开关往往和刹车灯共用一的刹车电压也不统一,所以必须接入二极管防止高压串入要做到8-50V输入时都能正常工作。
6.其它功能开关信号比较简单,功能实现均依靠内部程序不一一介绍。
三、智能信号处理,控制部分,上面已经介绍过,不再重四、驱动控制信号预处理部分;驱动控制信号大致由两种信号合成:PWM信号和相位逻辑得不先介绍一下功率开关部分:功率开关部分是由三组半开关,用以改变电机线圈的通电顺序和通电方向,我们一的功率管称为上桥,与电源地相接的功率管称为下桥,参位逻辑开关信号由A+、B+、C+提供,这三个控制信号必后控制对应的上桥,下桥的相位逻辑开关信号由A-、B-直接被用来控制下桥的开关。
单片机这六个脚上都接了一阻到地,是为了防止单片机处在复位时,由于这些脚均处能会引入干扰信号而导致后面逻辑电路误动作,这个比较在看到控制部分的电路图并非上面所说的那么简单,实际经过了4个逻辑电路处理后才到达上下桥的驱动电路,许么要如此复杂呢?其实这些电路都是为了实现一个功能:同步续流。
为什么要同步续流需要说明一下,这里的“同步续流”,被一些人称为“同流是用在电源上的名词,用在这里明显不太合适。
先参考图9图9:同步续流示意图假设此时A相上桥和C相下桥通电,当A相上桥PWM占空时,通过电机线圈的电流是断续的,但上桥关闭的时候,个电感,线圈上必定会出现一个自感反电动势,这个反电电流的方向不变,由于A相上桥已经关闭,这个电流就会的C相下桥,地,A相下桥的续流二极管继续流动,见图这个自感电流并不大,但总电流大时,线圈中储存的能量电流也会相当大,我们知道MOSFET的续流二极管本身的压在通过的自感电流大时,功耗便会相当大,假设自感电流降为0.7V时,功耗为7W,显然这个发热量是相当大的,很烫,假如我们此时把下桥打开,让自感电流直接从MO (MOSFET导通时电流可以双向流通),再假设MOSFET导Ω,10A的时候功耗就变为1W,理论上就可以大大降低下低温升。
但在实际上,由于上下桥在交叉导通时需要一个通造成电源短路,这个作用会打一些折扣,不过效果还是什么很多产品的下桥会用好一点的管子的原因。
同步续流的实现1.倒向,截波与死区控制,电路见图10图10:倒向,死区发生器.略单片机产生的PWM占空比信号一路通过与门,经R53,R52空比)后输出,相位不变,截波量大约为1.5μS,形成P 至上桥驱动,与上桥逻辑开关信号相与后驱动上桥MOSF 和C24,反相器U5A移相,相移量大约750nS,再经U5B反号,最后合成至下桥驱动。
此时两个信号输出时相位相同空比比PWM信号占空比大1.5μS,但由于PWM-信号已经偏信号刚好套在PWM-信号中间,两边空出750nS作为MOSF处理后波形示意图如图11图11:死区发生器输出波形2.同步续流的逻辑关系图12为A相驱动电路的实际电路图12因为三相驱动相同,所以我们这里仅以A相为例说明同步程当A向的逻辑开关信号“A+”为高电平时,A相上桥被“在整机电流较小的情况下,PV信号为高电平,不管或非入脚电平如何,其输出总是低,所以此时或非门U2B仅受“A-”信号是下桥的逻辑开关,它仅在下桥需要导通时置整机电流比较大,而PWM占空比小于100%时,由于A相断导致电机线圈中出现较大感应电流,感应电流通过另一桥的二极管泄放,为降低该二极管的功耗,此时应将A相以减小压降,这时单片机将“PV”信号端拉低,在PV信号信号共同作用下,“PWM-”信号通过U3C传递到U2B,而低,所以U2B受“PWM-”信号控制,在PWM信号关断的间导通。
当“A+”信号为低电平时,“PWM-”信号并不影响的正确逻辑而不会误导通。
五、功率驱动开关部分。
以单独一组A相上下桥驱动为例,见图12见了这种电路,很多人首先会问:为何上桥的驱动电路如很显然,这么复杂的电路一定有其用途,如果要简单一点关直接用P沟道的MOSFET来做就可以,这样驱动电路会道的功率MOSFET又贵又难买,为了节省成本,只能用N 沟道的MOSFET导通时其栅极G的电压必须比源极S高出完全导通,这样在上桥导通时,假设电源电压为48V,那就必须比电源电压高12V,也就是大于60V才行。