遥感图像分类方法_文献综述
遥感图像分类技术研究

遥感图像分类技术研究一、遥感图像分类的基本概念及背景遥感图像分类是指利用计算机方法将遥感图像进行自动分类,将像元或像素点归类为不同的地物或地物类型。
遥感图像是指通过遥感传感器获取的地球表面信息的图像,主要包括航空遥感、卫星遥感等。
遥感图像分类技术可以广泛应用于国土资源调查、环境遥感监测、农业与林业等许多领域。
二、遥感图像分类技术因素1. 数据预处理数据预处理是遥感图像分类技术中非常重要的一步,主要是对遥感图像进行初步去噪、辐射校正等操作,以提高其质量和可用性。
常用的预处理方法包括滤波、辐射定标、大气校正等。
2. 特征提取遥感图像的特征提取是将遥感图像中的自然结构转换为计算机可识别的数字特征向量的过程。
常用的特征提取方法包括基于纹理的方法、基于谱特征的方法以及形状特征提取方法等。
3. 分类算法常见的遥感图像分类算法包括最大似然法、支持向量机、神经网络等。
其中,最大似然法和支持向量机算法是应用最广泛的两种算法,具有较高的分类准确性和泛化性能。
三、常见的遥感图像分类方法1. 基于纹理分析的方法纹理是指由几何形状、大小、密度、亮度等因素共同作用形成的某种规则的表现形式。
其基本特点是在局部区域内具有规则和可重复性。
利用遥感图像的纹理数据,可以利用基于灰度共生矩阵、滤波器和小波等方法进行纹理分析。
基于纹理分析的方法适用于研究土地利用类型、森林类型等需要区分细致的地物类型。
2. 基于谱信息的方法基于谱信息的遥感图像分类方法利用遥感图像数据的光谱特征进行分类。
这种方法主要基于多光谱数据分类和高光谱数据分类。
多光谱数据是指每个像元采集了数个波段的数据,而高光谱数据则包含了更多的波段数据。
采用基于谱信息的方法可以对土地覆盖类型、植被类型等大尺度空间范围的遥感图像进行分类。
3. 基于空间信息的方法基于空间信息的遥感图像分类方法是指利用遥感图像像素的空间位置信息,结合图像的特征提取和分类方法进行分析。
这种方法主要通过分析像素到邻域像素之间的距离、方向和大小等因素来提取空间信息。
试述遥感图像分类的方法,并简单分析各种分类方法的优缺点。

遥感原理与应用1.试述遥感图像分类的方法,并简单分析各种分类方法的优缺点。
答:监督分类:1、最大似然法;2、平行多面体分类法:这种方法比较简单,计算速度比较快。
主要问题是按照各个波段的均值为标准差划分的平行多面体与实际地物类别数据点分布的点群形态不一致,也就造成俩类的互相重叠,混淆不清的情况;3、最小距离分类法:原理简单,分类精度不高,但计算速度快,它可以在快速浏览分类概况中使用。
通常使用马氏距离、欧氏距离、计程距离这三种判别函数。
主要优点:可充分利用分类地区的先验知识,预先确定分类的类别;可控制训练样本的选择,并可通过反复检验训练样本,以提高分类精度(避免分类中的严重错误);可避免非监督分类中对光谱集群组的重新归类。
主要缺点:人为主观因素较强;训练样本的选取和评估需花费较多的人力、时间;只能识别训练样本中所定义的类别,对于因训练者不知或因数量太少未被定义的类别,监督分类不能识别,从而影响分结果(对土地覆盖类型复杂的地区需特别注意)。
非监督分类:1、ISODATA; 2、K-Mean:这种方法的结果受到所选聚类中心的数目和其初始位置以及模式分布的几何性质和读入次序等因素的影响,并且在迭代的过程中又没有调整类别数的措施,因此不同的初始分类可能会得到不同的分类结果,这种分类方法的缺点。
可以通过其它的简单的聚类中心试探方法来找出初始中心,提高分类结果;主要优点:无需对分类区域有广泛地了解,仅需一定的知识来解释分类出的集群组;人为误差的机会减少,需输入的初始参数较少(往往仅需给出所要分出的集群数量、计算迭代次数、分类误差的阈值等);可以形成范围很小但具有独特光谱特征的集群,所分的类别比监督分类的类别更均质;独特的、覆盖量小的类别均能够被识别。
主要缺点:对其结果需进行大量分析及后处理,才能得到可靠分类结果;分类出的集群与地类间,或对应、或不对应,加上普遍存在的“同物异谱”及“异物同谱”现象,使集群组与类别的匹配难度大;因各类别光谱特征随时间、地形等变化,则不同图像间的光谱集群组无法保持其连续性,难以对比。
遥感图像分类方法及应用示例

遥感图像分类方法及应用示例遥感技术是通过卫星、飞机等远距离传感器获取地表信息的一种技术手段。
遥感图像分类是遥感技术中的一项重要任务,它可以将遥感图像中的像素按照其特征进行分类,并生成分类结果。
本文将介绍遥感图像分类的方法,并给出一些应用示例。
一、遥感图像分类方法1. 基于像元的分类方法基于像元的分类方法是将遥感图像中的每个像素点看作一个样本进行分类,通过像素点的光谱特征来确定其所属类别。
常见的方法有最大似然法、支持向量机等。
最大似然法是一种基于统计学原理的分类方法,它通过求解样本的概率密度函数来确定像素点的类别。
支持向量机是一种基于样本间距离的分类方法,它通过构建超平面将不同类别的样本分开。
2. 基于对象的分类方法基于对象的分类方法是将遥感图像中的像素组成的对象进行分类,通过对象的形状、纹理等特征来确定其所属类别。
常见的方法有基于区域的分割和基于对象的分类。
基于区域的分割将遥感图像中的像素按照相似性进行分组,形成具有相同特征的区域。
基于对象的分类是在分割得到的区域基础上,通过提取区域的特征来确定其所属类别。
3. 基于深度学习的分类方法随着深度学习技术的发展,基于深度学习的分类方法在遥感图像分类中得到了广泛应用。
深度学习通过构建深层神经网络模型,可以自动学习遥感图像中的特征表示。
常见的方法有卷积神经网络(CNN)、循环神经网络(RNN)等。
卷积神经网络可以有效地提取图像的空间特征,循环神经网络可以捕捉图像序列的时序特征。
二、遥感图像分类的应用示例1. 农作物类型分类农作物类型分类是农业生产中的重要任务,可以帮助农民了解农田的分布情况和种植结构,指导农作物管理和精细化农业。
通过遥感图像分类方法,可以将农田遥感图像中的不同农作物进行分类,比如小麦、玉米、水稻等。
这样可以帮助农民进行农作物识别和农田监测,提高农业效益。
2. 土地利用分类土地利用分类是城市规划和土地资源管理中的重要任务,可以帮助决策者了解土地利用的分布情况和变化趋势,指导城市规划和土地资源开发。
测绘技术中的遥感图像解译与遥感图像分类方法
测绘技术中的遥感图像解译与遥感图像分类方法测绘技术是利用各种设备和方法对地球表面进行测量和绘制的技术,其中遥感图像解译和分类方法是测绘技术中的重要组成部分。
遥感技术是指利用传感器获取地球表面信息的技术,通过对遥感图像进行解译和分类,可以提取出有用的地理信息,为地理学研究、资源调查和环境监测等领域提供数据支持。
遥感图像解译是指根据图像上的信息对图像中的地物进行判读和解释。
遥感图像通常包括光谱信息和空间信息,通过对这些信息的解析和分析,可以确定图像中的地物类型和分布情况。
在遥感图像解译中,常用的方法包括目视解译、图像统计解译和专家系统解译等。
目视解译是最早也是最直观的解译方法,通过人眼对图像进行观察和判断,确定图像中的地物类型。
目视解译的优点是操作简单,直观易懂,但是受人眼主观判断的限制,对于复杂的地物类型和细节信息的提取不够准确。
图像统计解译是通过统计学方法对图像进行解译,利用图像中的像素信息进行地物类型的分类。
图像统计解译通常包括像元分析和多元分析两种方法。
像元分析是指对图像中每个像素的特征进行统计学分析,根据像素的特征值确定像素所属的地物类型。
多元分析是指对图像中的多个像素的特征进行综合分析,通过建立分类模型对地物类型进行分类。
专家系统解译是利用计算机技术模拟人类专家的知识和经验进行图像解译。
专家系统解译将专家的知识和经验编写成规则库或知识库,通过对图像进行逻辑推理和判断,确定图像中的地物类型。
专家系统解译的优点是可以充分利用专家的知识和经验,提高解译的准确性和效率。
遥感图像分类是指将遥感图像中的像素按照其所属的地物类型进行划分和分类。
遥感图像分类是遥感图像解译的基础,是提取地理信息的关键步骤。
遥感图像分类方法主要包括基于像元的分类和基于对象的分类两种。
基于像元的分类是将图像中的每个像素根据其光谱特征进行分类。
基于像元的分类方法主要包括最大似然分类、支持向量机分类和人工神经网络分类等。
最大似然分类是一种常用的统计学分类方法,通过计算像素的概率密度函数,确定像素所属的地物类型。
遥感图像分类方法_文献综述
遥感图像分类方法研究综述摘要本文概述了遥感图像分类的概念和原理,详细探讨了传统的遥感分类方法,对各种方法的进行了定性的比较与分析。
然后介绍了分别基于GPU、计算机集群和刀片机服务器的三种加快分类速度的途径,最后展望了遥感图像分类方法的发展方向和研究热点。
关键词:遥感;图像分类;监督分类;非监督分类;GPU;机群系统;刀片机1.引言在遥感图像处理的研究中,无论是专业信息提取,地物变化预测,还是专题地图制作等都离不开分类。
遥感图像分类有类别多,混合度大和计算量大的特点,分类方法的优劣直接关系到分类的精度和速度。
由于遥感图像本身的空间分辨率以及“同物异谱”和“异物同谱”现象的存在,往往出现较多的错分、漏分现象,导致分类精度不高[1],如何实现图像分类识别并满足一定的分类精度,是当前遥感图像研究中的一个关键问题, 也是研究的焦点[2]。
2.遥感图像分类原理遥感图像通过亮度值或像素值的高低差异及空间变化表示不同地物的差异,如不同类型的植被、土壤、建筑物及水体等,这也是区分不同地物的理论依据。
利用光谱特征(地物电磁波辐射的多波段测量值)或纹理等空间结构特征,按照某种规则就能对地物在遥感图像上的信息进行识别与分类。
图像分类的目标就是通过对各类地物波谱特征的分析选择特征参数,将特征空间划分为不相重叠的子空间,进而把影像诸像元划分到各子空间去,从而实现分类[3]。
3.传统分类方法遥感影像的计算机分类方法可分为两种:统计判决分类和句法模式识别。
前者通过对研究对象进行大量的统计分析, 抽出反映模式的本质特点、特征而进行识别。
后者则需要了解图像结构信息, 从而对其进行分类。
传统的分类方法一般为统计判决分类, 如最大似然法、K均值法等。
近年来发展的分类新方法则多采用句法方法, 如专家系统法和决策树分类法等。
根据是否已知训练样本的分类数据,统计模式方法可分为监督分类、非监督分类。
下面将具体介绍监督分类、非监督分类以及其它分类(如模糊分类和人工神经网络分类)的典型算法及其主要步骤。
遥感图像分类
原始遥感图像
对应的专题图像
用光谱信息 对影像逐个 像元地分类, 在结果的分 类地图上会 出现“噪声”
产生噪声的原因有原始影像本身的噪声,在地类 交界处的像元中包括有多种类别,其混合的幅射 量造成错分类,以及其它原因等
另外还有一种现象,分类是正确的,但某种类别 零星分布于地面,占的面积很小,我们对大面积 的类型感兴趣,因此希望用综合的方法使它从图 面上消失
简单集群分类方法
K-均值法(K-means Algorithm) Cluster分类法 迭代自组织数据分析技术方法(Iterative
Self-Organization Data Analysis Techniques, ISODATA)
通过自然的聚类,把它分成8类
K-均值算法的聚类准则是使每一聚类中,像元到 该类别中心的距离的平方和最小
A. 按照某个原则选择一些初始聚类中心 B. 计算像元与初始类别中心的距离,把像素分配
到最近的类别中
C. 计算并改正重新组合的类别中心 D. 过程重复直到满足迭代结束的条件
仅凭遥感影像地物的光谱特征的分布 规律,即自然聚类的特性,进行“盲 目”的分类
其分类的结果只是对不同类别达到了 区分,但并不能确定类别的属性;其 类别的属性是通过分类结束后目视判 读或实地调查确定的
遥感图像计算机分类
色调、颜色、阴影、形状、纹理、大小、位置、图型、相关布局
基于光谱的
基于空间关系的
遥感图像特征集
遥感图像 遥感图像计算机分类流程框图
将影像数据的连续变化转化为地图模式, 以提供给用户有意义的信息
获得关于地面覆盖和地表特征数据的更深 刻的认识
较目视解译客观,在分析大数据集时比较 经济
基本思想:通过迭代,逐次移动各类的中心,直 至得到最好的聚类结果为止
遥感技术文献综述

遥感技术文献综述当涉及到遥感领域的文献综述时,以下是一个基本的模板可以作为参考:概要:在这篇文献综述中,我们对遥感技术在特定应用领域或特定主题方面的研究进行了综合和分析。
通过回顾相关文献,我们总结了当前遥感研究的进展、应用方法和研究结果。
本文综述的目的是提供一个关于遥感在特定应用或主题方面的最新研究动态的全面概述,以及未来研究的潜在方向。
引言:在本节中,我们简要介绍了遥感技术的基本原理和应用领域的背景。
我们提供了关于遥感数据获取、遥感传感器和数据处理方法的概述。
此外,我们对遥感在不同领域中的重要性和实际应用进行了讨论。
方法:在这一部分,我们说明了文献综述的方法和搜索策略。
我们详细描述了我们使用的数据库、关键词和筛选标准。
我们还讨论了对文献进行筛选和排序的过程。
研究进展:在这一节中,我们总结了最新的研究进展,包括遥感技术在特定应用领域中的应用案例。
我们回顾了相关文献,涵盖了该领域内的关键问题、挑战和解决方案。
我们介绍了不同研究团队的工作,讨论了他们的方法、数据来源和实验结果。
应用:在这一部分,我们探讨了遥感技术在特定应用领域中的应用案例。
我们列举了使用遥感数据解决的问题,并说明了遥感技术在这些应用中的优势和局限性。
我们还介绍了相关的数据处理方法和技术,包括图像分类、变化检测、地表温度估算等。
未来方向:在这一节中,我们提出了遥感研究的未来发展方向。
我们讨论了当前研究中存在的挑战和限制,并提出了潜在的解决方案。
我们还探讨了遥感技术可能的改进和创新,以应对日益复杂的遥感应用需求。
结论:在这篇文献综述中,我们回顾了遥感技术在特定应用领域或特定主题方面的研究进展。
我们总结了当前研究的成果和应用方法,并探讨了未来的发展方向。
我们希望这篇综述能为研究人员提供有关遥感技术在该领域应用的全面概述,为未来的研究提供参考和启示。
请根据你的具体要求和领域知识,填充各个部分的内容,这将是一篇完整的遥感文献综述。
需要注意的是,这只是一个通用模板,具体结构和内容可能会因涉及的应用领域或主题而有所不同。
遥感图像的分类方法

遥感图像的分类方法
遥感图像的分类方法常见有以下几种:
1. 监督分类方法:该方法需要先准备一些具有标签的样本数据集进行训练,并从中学习模式进行分类。
常见的监督分类方法包括最大似然分类、支持向量机等。
2. 无监督分类方法:该方法不需要标签样本数据集,通过对图像像素进行统计分析和聚类来确定类别。
常见的无监督分类方法包括K均值聚类、高斯混合模型等。
3. 半监督分类方法:该方法结合监督和无监督分类方法的优势,同时利用有标签和无标签样本数据进行分类。
常见的半监督分类方法包括标签传播、半监督支持向量机等。
4. 深度学习分类方法:近年来,随着深度学习方法的发展,基于卷积神经网络(CNN)的遥感图像分类方法变得流行。
这些方法通过搭建深度学习网络模型并使用大量的标签样本进行训练,能够实现较高的分类精度。
除了以上几种方法外,还有基于纹理特征、形状特征等的分类方法。
不同的分类方法适用于不同的遥感图像场景和实际需求。
综合考虑数据集大小、分类效果、计算时间等因素,选择合适的分类方法对于遥感图像的分类任务非常重要。
遥感图像分类方法综述

遥感图像分类方法综述
张裕;杨海涛;袁春慧
【期刊名称】《四川兵工学报》
【年(卷),期】2018(039)008
【摘要】将常见的遥感图像分类方法分为基于人工特征描述的分类方法、基于机器学习的分类方法和基于深度学习的分类方法三类.介绍了各类方法的主要算法,总结和评述了各算法的优缺点,最后展望了遥感图像分类方法研究发展趋势.
【总页数】5页(P108-112)
【作者】张裕;杨海涛;袁春慧
【作者单位】航天工程大学研究生管理大队,北京101416;航天工程大学航天遥感室,北京101416;航天工程大学研究生管理大队,北京101416
【正文语种】中文
【中图分类】TP751
【相关文献】
1.遥感图像分类方法综述 [J], 马莉
2.高光谱遥感图像分类方法综述 [J], 张蓓
3.稀疏表示遥感图像分类方法综述 [J], 何苗;王保云;盛伟;孔艳
4.遥感图像分类方法综述 [J], 张裕; 杨海涛; 袁春慧
5.稀疏表示遥感图像分类方法综述 [J], 何苗;王保云;盛伟;孔艳
因版权原因,仅展示原文概要,查看原文内容请购买。
遥感图像场景分类综述
遥感图像场景分类综述遥感图像场景分类是指通过对遥感图像进行分析和解读,将图像中的不同场景进行分类和识别。
随着技术的不断进步和应用领域的拓展,遥感图像场景分类在农业、城市规划、环境监测、资源调查等领域具有广泛的应用前景和重要的研究价值。
本文将综述遥感图像场景分类的研究进展、常用的分类方法以及挑战和未来发展方向。
一、研究进展1.1 图像特征提取方法在遥感图像场景分类中,图像特征提取是关键的步骤之一。
传统的特征提取方法包括颜色直方图、纹理特征、形状特征等。
然而,随着深度学习技术的快速发展,基于卷积神经网络(CNN)的特征提取方法在遥感图像场景分类中取得了显著的性能提升。
1.2 分类器设计和优化分类器的设计和优化对于遥感图像场景分类的准确性和稳定性具有重要影响。
常见的分类器包括支持向量机(SVM)、决策树(DT)和随机森林(RF)等。
此外,研究人员还提出了一系列改进的分类器结构,如卷积神经网络(CNN)和循环神经网络(RNN),用于提高分类精度和处理复杂场景。
二、常用的分类方法2.1 基于传统机器学习的方法传统机器学习方法在遥感图像场景分类中被广泛应用。
这些方法通过提取图像的统计特征,如颜色、纹理和形状等,然后使用分类器对特征进行训练和分类。
这些方法的优点是计算效率高、模型可解释性强,但在复杂场景和大规模数据集上的表现有限。
2.2 基于深度学习的方法深度学习方法近年来在图像分类领域取得了巨大的成功,并在遥感图像场景分类中得到了广泛应用。
这些方法利用深度神经网络对图像进行特征学习和分类。
其中,卷积神经网络(CNN)是最常用的深度学习模型之一,通过采用多层卷积和池化操作,实现对图像特征的有效提取和表示。
三、挑战和未来发展方向3.1 多样性的地物类型和场景遥感图像中存在着多样性的地物类型和场景,如农田、森林、建筑物等。
不同地物类型的特征差异较大,因此如何从复杂的遥感图像中准确地提取并表示不同地物的特征仍然是一个挑战。
遥感图像分类方法与精度评价

遥感图像分类方法与精度评价遥感图像分类是指利用遥感图像数据进行地物类型区分的过程,是遥感技术在地学研究和应用中的重要环节之一。
遥感图像分类方法的选择和精度评价是决定分类结果质量和可靠性的关键因素。
本文将探讨遥感图像分类的常用方法及精度评价指标。
一、遥感图像分类方法1. 基于像元的分类方法基于像元的分类方法是将每个像素点作为分类的基本单位,根据像素的数值或特征属性进行分类。
这种方法简单直观,适用于像素空间分布均匀、地物类型单一的情况。
常用的基于像元的分类方法有最大似然分类法、支持向量机分类法等。
最大似然分类法是一种常见的统计分类方法,通过对已知类别的样本数据进行统计分析,确定多类别高斯模型参数,然后利用似然函数计算每个像素点属于各个类别的概率,最终选择概率最大的类别作为分类结果。
支持向量机分类法是一种常用的机器学习方法,基于通过分隔超平面来尽可能精确地划分样本数据。
该方法通过寻找最优分类超平面来实现分类,可以处理非线性分类问题,并具有较好的泛化性能。
2. 基于对象的分类方法基于对象的分类方法是将图像中的像素按照一定标准进行分割,形成不同的地物对象,然后根据对象的形状、纹理、光谱等特征进行分类。
这种方法考虑了地物的空间关系,适用于地物类型复杂、光谱混杂的情况。
常用的基于对象的分类方法有基于规则的分类法、基于特征的分类法等。
基于规则的分类法是基于人工设定的分类规则来对遥感图像中的对象进行分类,需要根据实际需求和专业知识进行规则的制定。
这种方法对专业知识的要求较高,但可以得到较为精确的分类结果。
基于特征的分类法是通过对对象的形状、纹理、光谱等特征进行提取和分析,根据特征的差异来实现分类。
这种方法相对较为自动化,适用于大规模图像处理。
二、遥感图像分类精度评价遥感图像分类精度评价是对分类结果进行可靠性和精度的评估,常用的评价指标包括分类准确性、Kappa系数、用户精度、制图精度等。
分类准确性是指分类结果中正确分类的像素数占总像素数的比例。
测绘技术中的遥感图像分类与监督分类方法

测绘技术中的遥感图像分类与监督分类方法引言遥感图像分类是测绘技术中常用的图像处理方法之一,它通过对遥感图像进行分类和分割,为地理信息系统(GIS)和地球观测提供了重要的数据支持。
本文将介绍遥感图像分类的基本概念,以及常用的监督分类方法。
一、遥感图像分类的基本概念遥感图像分类是指将遥感图像中的像素根据其反射率或辐射率等特征划分为不同地物类别,并赋予其相应的分类标签。
遥感图像分类可以帮助人们了解地物分布、变化趋势以及环境状况等,对于农业、城市规划、环境保护等领域具有重要的应用价值。
二、监督分类方法1. 最大似然法最大似然法是一种常用的监督分类方法,它基于贝叶斯决策理论,通过计算每个像素属于不同类别的概率,从而确定其分类标签。
最大似然法假设像素的灰度值服从高斯分布,并通过最大化像素灰度值在每个类别中的概率来进行分类。
虽然最大似然法在某些情况下效果较好,但它对于复杂的遥感图像分类问题可能存在一定的局限性。
2. 支持向量机(SVM)支持向量机是一种基于统计学习理论的监督分类方法,它通过构建一个最优的超平面,将不同类别的像素分隔开。
支持向量机不仅可以处理线性可分的数据,还可以通过核函数将数据映射到高维空间,从而处理线性不可分的数据。
支持向量机在处理遥感图像分类问题时具有较好的性能,但其计算复杂度较高,需要大量的训练样本和运算时间。
3. 随机森林随机森林是一种集成学习方法,它通过组合多个决策树,从而提高分类准确性。
随机森林不仅可以处理多类别的分类问题,还可以处理高维数据,并且具有较好的鲁棒性和抗噪性。
在遥感图像分类中,随机森林通常能够取得较好的分类效果,并且对于特征的选择和处理具有一定的鲁棒性。
4. 卷积神经网络(CNN)卷积神经网络是一种基于深度学习的监督分类方法,它通过多层卷积层和池化层进行特征提取和降维,最后通过全连接层进行分类。
卷积神经网络在图像分类领域取得了显著的成就,对于遥感图像分类问题也有较好的应用效果。
遥感概论第12章 遥感图像的分类 122.12 第12章 遥感图像的分类

影像分类是遥感、影像分析和模式识别的重要组成部分
• 影像分类可以作为影像分析的直接目标:如土地利用分类、 农作物种类识别、湿地类型识别等,以分类影像作为成果
• 影像分类也可以作为影像分析的中间环节:如研究森林情 况,需要先提取出森林的范围;研究草地或农业情况,需 要先提取出草地和耕地的范围等
在影像分类过程中,需要用到分类器:即按照一定方法进 行影像分类的计算机程序
• 此时,需要采用距离量算法确定该点究竟属于哪个点集群
• 如果像元A、C间的距离大于B、C间的距离,则像元C属于B ,否则属于A
因此,距离的量算是非监督分类的核心
(3)距离量算的方法
殴几里得距离测量
n
Dab [ (ai bi)2 ]1/ 2 i 1
• i表示波段,a和b表示像元值,Dab表示两像元之间的距离
概念:非监督分类是指在多光谱影像中搜寻和定义自然光 谱集群组的过程,也叫聚类分析或点群分析
• 计算机按照一定的规则自动地根据像元光谱或空间特征进 行像元分类,不需要人工选择训练样本,仅需极少的人工 输入参数
目前,非监督分类已经发展了近百种分类算法,但所有的 算法都是基于像元亮度的相似度
• 相似度一般用距离或相关系数来衡量,距离越小或相关系 数越大,则相似度越大,相似度大的像元归并为一类
• 分类器的种类很多,但还没有一种分类器能够适用于所有 的任务
• 研究人员,只需根据当前的实际需要,选择一种分类器即 可,也可针对自己的需要,设计自己的分类器
• 简单的点分类器 简单、高效,但错误多
• 邻域分类器 设计复杂,但能结合空间
纹理信息,提高了精度
2 信息类别和光谱类别
信息类别是用户使用的对地面事物的信息分类 • 如湿地的不同类型、农田的类型、土地利用的不同类型等 • 这些信息类别可提供给规划者、管理者、研究者参考使用 • 影像不直接记录信息类别,只记录亮度值,分析人员只能
遥感分类方法
遥感分类方法遥感分类是指利用遥感技术获取的图像数据,通过对图像进行解译和分类,将地物按照其特征进行划分和分类的过程。
遥感分类方法是遥感图像处理的重要内容,也是遥感应用的核心技术之一。
在遥感分类方法的研究和实践中,人们不断探索和总结出了多种分类方法,以适应不同的遥感应用需求。
一、基于像元的遥感分类方法。
基于像元的遥感分类方法是指将遥感图像中的每个像元按照其特征进行分类。
这种方法通常使用各种数学和统计模型,如最大似然分类、支持向量机、人工神经网络等,对像元进行分类。
这种方法的优点是能够充分利用遥感图像的空间信息,对图像进行高精度的分类。
但是,基于像元的分类方法也存在着计算量大、对数据质量要求高等缺点。
二、基于对象的遥感分类方法。
基于对象的遥感分类方法是指将遥感图像中的像元组合成具有一定空间连续性和相似性的对象,然后对这些对象进行分类。
这种方法通常使用分割算法将遥感图像分割成不同的对象,然后对这些对象进行分类。
基于对象的分类方法能够更好地反映地物的空间分布特征,对于一些地物边界不清晰的情况,基于对象的分类方法能够得到更好的分类结果。
三、基于特征的遥感分类方法。
基于特征的遥感分类方法是指根据地物的特征进行分类。
这种方法通常是先对地物的特征进行提取,然后根据这些特征进行分类。
地物的特征可以包括光谱特征、纹理特征、形状特征等。
基于特征的分类方法能够更好地反映地物的本质特征,对于一些光谱混合的地物,基于特征的分类方法能够得到更准确的分类结果。
四、基于深度学习的遥感分类方法。
随着深度学习技术的发展,基于深度学习的遥感分类方法逐渐成为研究热点。
深度学习技术能够自动学习图像的特征表示,对于遥感图像中复杂的地物分类问题具有很好的效果。
基于深度学习的分类方法能够更好地处理遥感图像中的复杂地物,对于一些传统方法难以解决的分类问题,基于深度学习的方法能够得到更好的分类结果。
总结起来,遥感分类方法是遥感图像处理的重要内容,不同的分类方法各有优缺点,应根据具体的遥感应用需求选择合适的分类方法。
基于深度学习的遥感图像分类技术研究

基于深度学习的遥感图像分类技术研究概述遥感图像分类是利用遥感传感器获取的图像信息对不同地物进行识别和分类的过程。
传统的遥感图像分类方法通常依赖于手工设计特征和分类器,这些方法在处理大规模遥感数据时面临着挑战。
近年来,深度学习技术的快速发展为遥感图像分类带来了新的可能性。
深度学习通过对大规模数据的自动学习,能够从数据中自动提取出最具代表性的特征,提高了遥感图像分类的准确性和效率。
基于深度学习的遥感图像分类方法1. 卷积神经网络(CNN)卷积神经网络是一种用于图像识别的深度学习模型。
通过通过卷积层、池化层和全连接层等不同组成部分,CNN可以从原始图像中逐步提取特征,并进行分类。
在遥感图像分类中,CNN已经取得了很大的成功。
2. 迁移学习遥感数据通常具有特别的特征,在没有大规模标注数据的情况下,很难直接利用深度学习方法进行训练。
迁移学习是一种通过利用预训练模型的方法,将已经在大规模数据上训练好的深度学习模型应用于遥感图像分类中。
迁移学习能够将已有的知识迁移到新的任务中,提高遥感图像分类的准确性。
3. 多尺度特征融合遥感图像通常具有不同的分辨率和信息密度。
通过融合多尺度的特征,可以提取更加全面和丰富的信息,从而提高遥感图像分类的准确性。
基于深度学习的方法可以通过多尺度卷积、多尺度注意力机制等技术实现多尺度特征融合。
4. 数据增强在遥感图像分类任务中,不同目标物体的遥感图像样本通常数量不平衡。
通过数据增强技术,可以通过对已有的样本进行旋转、平移、缩放等变换操作,生成新的合成样本,从而扩大训练数据的规模,改善模型的泛化能力。
5. 目标检测与定位遥感图像分类不仅需要识别图像中的目标物体,还需要准确地定位目标的位置。
基于深度学习的目标检测算法,如基于区域的卷积神经网络(R-CNN)、快速区域卷积神经网络(Fast R-CNN)和区域卷积神经网络(Faster R-CNN)等,可以实现遥感图像中目标的准确检测和定位。
遥感图像场景分类综述
人工智能及识别技术本栏目责任编辑:唐一东遥感图像场景分类综述钱园园,刘进锋*(宁夏大学信息工程学院,宁夏银川750021)摘要:随着科技的进步,遥感图像场景的应用需求逐渐增大,广泛应用于城市监管、资源的勘探以及自然灾害检测等领域中。
作为一种备受关注的基础图像处理手段,近年来众多学者提出各种方法对遥感图像的场景进行分类。
根据遥感场景分类时有无标签参与,本文从监督分类、无监督分类以及半监督分类这三个方面对近年来的研究方法进行介绍。
然后结合遥感图像的特征,分析这三种方法的优缺点,对比它们之间的差异及其在数据集上的性能表现。
最后,对遥感图像场景分类方法面临的问题和挑战进行总结和展望。
关键词:遥感图像场景分类;监督分类;无监督分类;半监督分类中图分类号:TP391文献标识码:A文章编号:1009-3044(2021)15-0187-00开放科学(资源服务)标识码(OSID ):Summary of Remote Sensing Image Scene Classification QIAN Yuan-yuan ,LIU Jin-feng *(School of Information Engineering,Ningxia University,Yinchuan 750021,China)Abstract:With the progress of science and technology,the application demand of remote sensing image scene increases gradually,which is widely used in urban supervision,resource exploration,natural disaster detection and other fields.As a basic image pro⁃cessing method,many scholars have proposed various methods to classify the scene of remote sensing image in recent years.This pa⁃per introduces the research methods in recent years from the three aspects of supervised classification,unsupervised classification and semi-supervised classification.Then,combined with the features of remote sensing images,the advantages and disadvantages of these three methods are analyzed,and the differences between them and their performance performance in the data set are com⁃pared.Finally,the problems and challenges of remote sensing image scene classification are summarized and prospected.Key words:remote sensing image scene classification;Unsupervised classification;Supervise classification;Semi-supervised clas⁃sification遥感图像场景分类,就是通过某种算法对输入的遥感场景图像进行分类,并且判断某幅图像属于哪种类别。
遥感图像分类
遥感图像分类遥感图像的分类就是通过对遥感图像中地物的光谱信息和空间信息进行分析,选择特征,将图像中每个象元按照某种规则或算法划分为不同的类别,然后获得遥感图像与实际地物的对应信息,从而实现遥感图像的分类。
一般的分类方法可分为两类:监督分类和非监督分类。
将多源数据应用于图像分类中,发展成基于专家知识的决策树分类。
一、监督分类监督分类(supervised),又称训练分类法,即用被确认的样本象元去识别其他未知象元的过程。
已经被确认类别的样本象元是指那些位于训练区的象元。
在这种分类中,分析者在图像上对每一种类别选取一定数量的训练区,计算机计算每种训练样区的统计或其他信息,每个象元和训练样本作比较,按照不同规则将其划分到其最相似的样本类。
监督分类的算法主要有:平行算法、最小距离法、最大似然法等。
这里采用最大似然法作为监督分类的算法。
原理:最大似然法假设遥感图像的每个波段数据都是正态分布。
其基本思想是:地物类数据在空间中构成特定的点群;每一类的每一维数据都在自己的数轴上成正态分布,该类的多维数据就构成了一个多维正态分布;各类多维正态分布模型各有其分布特征。
根据各类已有的数据,可以构造出各类的多维正态分布模型,在此基础上,对于任何一个像素,可反过来求出它属于各类的概率,取最大概率对应的类为分类结果。
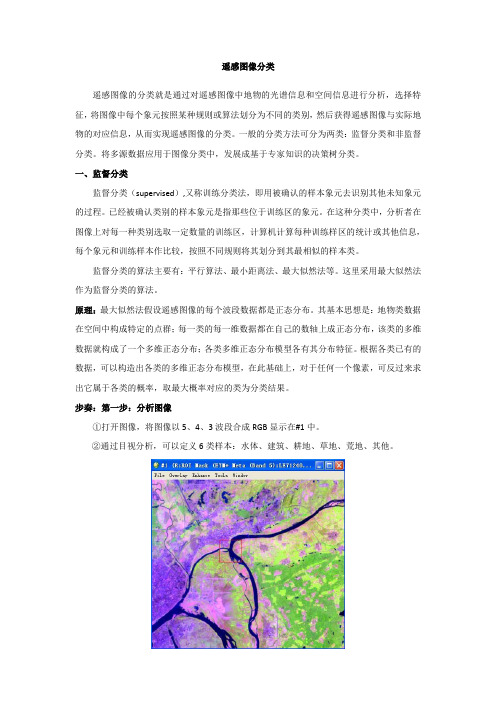
步奏:第一步:分析图像①打开图像,将图像以5、4、3波段合成RGB显示在#1中。
②通过目视分析,可以定义6类样本:水体、建筑、耕地、草地、荒地、其他。
第二步:选择训练样本①在主图像窗口选择Overlay-----Region of Interest,打开ROI Tool对话框。
②在ROI Tool对话框中设置相关样本的名称、颜色等。
③选择ROI_Type—Polygon,在window中选择image,在图像上绘制训练区。
④重复②、③步奏,最终完成以下结果:第三步:评价训练样本①在ROI Tool对话框中,选择Options——Compute ROI Separability,打开目标图像。
遥感图像分类方法与结果验证技巧

遥感图像分类方法与结果验证技巧遥感图像分类是利用遥感数据进行地物分类的过程,是遥感技术在地学领域中的重要应用之一。
而遥感图像分类方法的选择和结果验证技巧的使用对于获得准确可靠的分类结果至关重要。
本文将讨论常见的遥感图像分类方法以及一些结果验证技巧。
一、遥感图像分类方法1. 监督分类方法监督分类方法是最常用的一种遥感图像分类方法,它需要先手动标注一些样本点,然后使用机器学习算法进行分类。
常用的监督分类方法包括支持向量机(SVM)、随机森林(RF)和人工神经网络(ANN)等。
这些方法在遥感图像分类中表现出色,但要求标注样本点会增加工作量。
2. 无监督分类方法与监督分类方法相反,无监督分类方法不需要事先手动标注样本点,而是通过对图像内部的类别划分进行分类。
常用的无监督分类方法包括聚类算法,如K均值算法和谱聚类算法。
这些算法可以有效地从遥感图像中自动识别出地物的类别,但分类结果的准确性可能不如监督分类方法。
3. 半监督分类方法半监督分类方法结合了监督和无监督分类方法的优点,它既可以利用有标签样本进行训练,又可以利用无标签样本进行分类。
典型的半监督分类方法包括自动编码器和生成对抗网络(GAN)等。
这些方法在遥感图像分类中具有潜力,可以有效提高分类结果的准确性。
二、结果验证技巧1. 精确度评估精确度评估是验证分类结果准确性的重要指标之一。
常用的精确度评估方法包括混淆矩阵、精确度(Accuracy)、召回率(Recall)和F1值等。
通过对分类结果和真实样本进行对比,可以评估分类算法的准确性。
2. 交叉验证交叉验证是在有限的数据集上评估模型性能的常用方法,它可以有效地避免由于数据集选择不当而引起的偏差。
常见的交叉验证方法有k折交叉验证和留一交叉验证。
在遥感图像分类中,交叉验证可以帮助评估模型在不同样本集上的分类性能。
3. ROC曲线分析ROC曲线分析是衡量分类器性能的重要工具,它可以绘制出分类器在不同阈值下真阳性率和假阳性率之间的关系。
如何进行遥感图像的特征提取与分类
如何进行遥感图像的特征提取与分类遥感图像是通过航空或卫星等远距离感知装置获取的地表信息图像。
利用遥感技术可以获取大范围的地理信息,广泛应用于农业、城市规划、环境监测等领域。
而遥感图像的特征提取与分类则是处理遥感图像的重要环节,它能够帮助我们更好地理解和利用遥感图像。
一、遥感图像的特征提取特征提取是将原始遥感图像转化为能够描述地物类别的数学特征的过程。
在遥感图像中,不同地物或者地物类别往往具有不同的光谱、纹理、形状等特征。
因此,通过提取这些特征,我们可以对地物进行分类与分析。
1.光谱特征提取光谱特征是指反映地物物理性质的光谱波段数据。
通过选择不同的波段组合,我们可以提取出反映植被、水体、建筑物等地物特性的光谱特征。
常用的方法有主成分分析(PCA)、最大似然分类(MLC)等。
2.纹理特征提取纹理特征描述了图像中像素间的空间关系。
在遥感图像中,纹理特征可以用于区分不同地物的纹理复杂程度。
例如,植被具有较为均匀的纹理,而建筑物则较为具有几何纹理。
常用的纹理特征提取方法有灰度共生矩阵法(GLCM)、局部二值模式法(LBP)等。
3.形状特征提取形状特征是指地物在图像中的几何形状信息。
通过提取地物的形状特征,可以识别出地物的边界和形状。
例如,对于建筑物来说,我们可以通过提取其形状特征来判断其是直角形、圆形还是其他形状。
常用的形状特征提取方法有边缘检测算子、Hough变换等。
二、遥感图像的分类分类是将遥感图像中的像素划分到不同地物类别中的过程。
通过分类,我们可以获取遥感图像中不同地物的分布情况,进而进行地物的监测与分析。
1.监督分类监督分类是指使用人工定义的训练样本对遥感图像进行分类。
首先,我们需要准备一些具有代表性的训练样本,这些样本包含不同地物类别的图像区域。
然后,通过计算遥感图像与这些训练样本之间的差异,可以得到分类决策函数,进而对整幅遥感图像进行分类。
2.非监督分类非监督分类是指根据遥感图像中像素值的统计特征,自动将其划分到不同的类别中。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
遥感图像分类方法研究综述摘要本文概述了遥感图像分类的概念和原理,详细探讨了传统的遥感分类方法,对各种方法的进行了定性的比较与分析。
然后介绍了分别基于GPU、计算机集群和刀片机服务器的三种加快分类速度的途径,最后展望了遥感图像分类方法的发展方向和研究热点。
关键词:遥感;图像分类;监督分类;非监督分类;GPU;机群系统;刀片机1.引言在遥感图像处理的研究中,无论是专业信息提取,地物变化预测,还是专题地图制作等都离不开分类。
遥感图像分类有类别多,混合度大和计算量大的特点,分类方法的优劣直接关系到分类的精度和速度。
由于遥感图像本身的空间分辨率以及“同物异谱”和“异物同谱”现象的存在,往往出现较多的错分、漏分现象,导致分类精度不高[1],如何实现图像分类识别并满足一定的分类精度,是当前遥感图像研究中的一个关键问题, 也是研究的焦点[2]。
2.遥感图像分类原理遥感图像通过亮度值或像素值的高低差异及空间变化表示不同地物的差异,如不同类型的植被、土壤、建筑物及水体等,这也是区分不同地物的理论依据。
利用光谱特征(地物电磁波辐射的多波段测量值)或纹理等空间结构特征,按照某种规则就能对地物在遥感图像上的信息进行识别与分类。
图像分类的目标就是通过对各类地物波谱特征的分析选择特征参数,将特征空间划分为不相重叠的子空间,进而把影像内诸像元划分到各子空间去,从而实现分类[3]。
3.传统分类方法遥感影像的计算机分类方法可分为两种:统计判决分类和句法模式识别。
前者通过对研究对象进行大量的统计分析, 抽出反映模式的本质特点、特征而进行识别。
后者则需要了解图像结构信息, 从而对其进行分类。
传统的分类方法一般为统计判决分类, 如最大似然法、K均值法等。
近年来发展的分类新方法则多采用句法方法, 如专家系统法和决策树分类法等。
根据是否已知训练样本的分类数据,统计模式方法可分为监督分类、非监督分类。
下面将具体介绍监督分类、非监督分类以及其它分类(如模糊分类和人工神经网络分类)的典型算法及其主要步骤。
3.1 监督分类监督分类是一种常用的精度较高的统计判决分类,在已知类别的训练场地上提取各类训练样本,通过选择特征变量、确定判别函数或判别规则,把图像中的各个像元点划归到各个给定类[4]。
常用的监督分类方法有最小距离分类、平行六面体分类、最大似然分类等。
主要步骤包括:(1)选择特征波段;(2)选择训练区;(3)选择或构造训练分类器;(4)对分类精度进行评价。
3.1.1 最小距离分类最小距离分类的基本思想是按照距离判决函数计算象素点与每一个聚类中心的光谱距离,将该像素点归到距离最近的类别。
该分类方法的距离判决函数是建立在欧氏距离的基础上的,公式如下:d(x,M i)=[∑(x K−M iK)2nK=1] 1 2其中n为波段数(维数),K是某一特征波段,i是聚类中心数,M i是第i类样本均值,M iK是第i类中心第k波段的象素值,d(x,M i)是象素点x到第i类中心M i的距离。
最小距离判别方法的具体步骤如下:(1)确定地区和波段;(2)选择训练区;(3)根据各训练区图像数据,计算M i;(4)将训练区外图像像元逐类代入等式计算d(x,M i),按判别规则比较大小,将像元归到距离最小的类别;(5)产生分类图像;(6)检验结果,如果错误较多,重新选择训练区;(7)输出专题图像。
最小距离分类有计算量相对较小,分类速度快的优点并能适用于样本较少的情况。
缺点是分类精度相对其它监督分类方法较低。
3.1.2 平行六面体分类平行六面体分类是通过设定在各轴上的一系列分割点,将多维特征划分成对应不同类别的互不重叠的特征子空间的分类方法。
通过选取训练区详细了解分类类别的特征,并以较高的精度设定每个分类类别的光谱特征上限值和下限值,构成特征子空间[8]。
对于一个未知类别的像素点,它的分类取决于它落入哪个类别特征子空间中。
如落入某个特征子空间中,则属于该类,如落入所有特征子空间中,则属于未知类型。
因此平行六面体分类要求训练区样本的选择必须覆盖所有的类型。
这种方法的优点有:快捷简单,因为对每一个范本的每一波段与数据文件值进行对比的上下限都是常量;对于一个首次进行的跨度较大的分类,这一判别规则可以很快缩小分类数,避免了更多的耗时计算,节省了处理时间。
缺点是由于平行六面体有“角”,因此象素点在光谱意义上与模板的平均值相差很远时也可能被分类。
3.1.3 最大似然分类最大似然分类利用了遥感数据的统计特征,假定各类别的分布函数为正态分布,在多变量空间中形成椭圆或椭球分布,根据各方向上散布情况不同按正态分布规律用最大似然判别规则进行判决,得到较高准确率的分类结果。
分类公式如下:D=ln(a c)−[0.5ln(|Cov c|)]−[T(Cov c−1)(X−M C)]其中,D是加权距离(可能性),C是某一特征类型,X为象素的测量向量,M C是类型C 的样本平均向量,a c是任一象素属于类型C的百分概率(缺省为1.0,或根据先验知识输入),Cov c是类型C的样本中的象素的协方差矩阵。
具体的分类流程如下:(1)确定需要分类的地区和使用的波段和特征分类数,检查所用各波段或特征分量是否相互已经位置配准;(2)根据已掌握的典型地区的地面情况,在图像上选择训练区;(3)计算参数:根据选出的各类训练区的图像数据,计算M C和Cov C,确定先验概率a c;(4)分类:将训练区以外的图像像元逐个代入公式,对于每个像元,分几类就计算几次,最后比较大小,选择最大值得出类别;(5)产生分类图:给每一类别规定一个值,如分成10类,可规定每一类对应的值分别为1,2,3,···,10。
分类后的像元值便用类别值代替并进行着色,最后得到的分类图像就是专题图像;(6)检验结果,如果分类中错误较多,需要重新选择训练区再作以上各步,直到结果满意为止。
虽然最大似然法的分类精度较高,但是计算量大,分类时间长,而且对输入的数据有一定要求(最大似然是参数形式的,意味着每一输入波段必须符合正态分布)。
3.2 非监督分类非监督分类是在没有先验类别知识的情况下,根据图像本身的统计特征及自然点群的分布情况来划分地物类别的分类处理。
这类方法以图像的统计特征为基础,能够获得图像数据内在的分布规律。
因为非监督分类不需要对待分类的地区有已知知识或进行实地考察,相对监督分类而言有更广的应用范围。
主要的方法有K均值分类和ISODATA分类。
3.2.1 K均值分类K均值分类的基本思想是通过迭代,逐次移动各类的中心,直至得到最好的分类结果为止。
需要预先设定聚类中心的个数(这在一定程度上限制了该算法的应用),逐次移动各类的中心,使聚类域中所有样本到聚类中心的距离平方和最小,直至各类的中心不再移动(或移动的范围小于设定的阈值)或达到规定的迭代次数时停止分类。
其主要步骤如下:(1)确定类别数并各类的初始中心:Z1(0),Z2(0),…, Z K(0),K为类别数。
初始中心的选择对聚类结果有一定影响,一般通过以下方法选取:①根据问题的性质,用经验的方法确定类别数K,从数据中找出直观上看来比较适合的K个类的初始中心;②将全部数据随机地分为K个类别,将这些类别的重心作为K个类的初始中心;(2)择近归类:将所有像元按照与各中心的距离最小的原则分到K个聚类中心;(3)计算新中心:待所有样本第i次划分完毕后,重新计算新的集群中心Z j(i+1), j=1, 2, …,K;(4)如果聚类中心不变或小于设定的阈值,则算法收敛,聚类结束;否则回到步骤(2),进入下一次迭代;下图描述了K均值分类过程中各类中心移动的过程。
聚类中心数K、初始聚类中心的选择、样本输入的次序,以及样本的几何特性等均可能影响k均值算法的进行过程。
对这种算法虽然无法证明其收敛性,但当各类之间彼此远离时这个算法所得的结果是令人满意的。
由于K均值分类有实现过程简单,分类速度较快的优点,在遥感图像分类应用中有着重要的作用。
3.2.2 ISODATA分类ISODATA(Iterative Self-Organizing Data Analxsis Techniques A)分类也称为迭代自组数据分析算法,它与K均值分类类似,都是通过迭代移动各类的中心,直到得到最好的分类结果。
差别在于:第一,它不是调整一个样本的类别就重新计算一次各类样本的均值,而是在每次把所有样本都分类完毕之后才重新计算一次各样本的均值。
所以,K均值分类可看作逐个样本修正法,ISODATA分类可看作成批样本修正法;第二,该算法不仅可以通过调整样本所属类别完成样本的聚类分析,而且可以自动地进行类别的“合并”与“分裂”,从而得到类别数比较合理的聚类结果。
这种方法不受初始聚类组的影响,对识别蕴含于数据中的光谱聚类组非常有效,前提是重复足够的次数。
缺点是比较费时,因为可能要迭代上百次[9]。
3.3 其它分类方法3.3.1 模糊分类遥感图像中的像元不一定由单纯的一种地物信息构成,因此,用传统的“硬”分类方法(如前面提到的监督分类和非监督分类,每个像元归为单一类别)进行图像分类,无法获得较高的精度。
一种较好的解决办法就是采用以模糊理论为基础的模糊分类法。
模糊分类允许根据各类型的百分比函数,将一个像元归到几个类别。
模糊分类具有过程灵活简便、主观影响小、适应面广等优点。
但仍存在如下问题: (1)算法性能依赖于参数的初始化;(2)大数据量时算法严重耗时。
针对于这些问题学者们进行了很多研究,并取得了重要成果,主要研究内容有隶属函数确定、模糊模式识别匹配(分类)、模糊推理、模糊方法与统计方法的结合、模糊方法与人工神经网络的结合、模糊动态识别等[10]。
3.3.2 人工神经网络分类人工神经网络分类是利用计算机模拟人类学习的过程,建立输入与输出数据之间联系的程序。
在模仿人脑学习的过程中,通过进行重复的输入和输出训练来增强和修改输入和输出数据之间的联系[11]。
所以,人工神经网络分类也可归为监督分类。
人工神经网络主要由3个基本要素构成,即处理单元、网络拓扑结构及训练规则,是由大量简单的处理单元(神经元)连接成的复杂网络,能够模仿人的大脑进行数据接收、处理、贮存和传输。
神经网络方法具有极强的非线性映射能力,可高速并行处理大量数据,而且具有自学习、自适应和自组织能力。
下图为三层神经网络的典型结构图。
三层神经网络的典型结构图[12]目前,人工神经网络技术在遥感图像分类处理中的应用主要有单一的BP(Back Propagation,反向传播)网络、模糊神经网络、多层感知器、径向基函数(RBF)网络、Kohonen自组织特征分类器、Hybrid学习向量分层网络等多种分类器。
3.4 各种传统分类方法的比较监督分类的关键是训练样本的选择, 训练样本的质量直接关系到分类能否取得良好的效果。