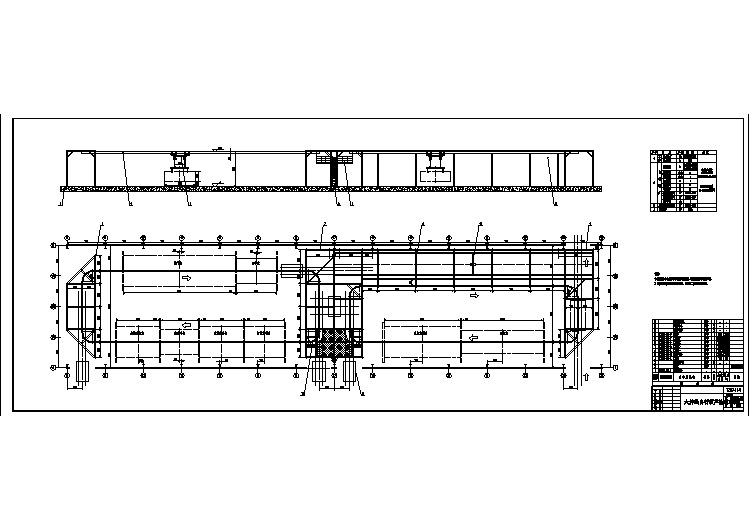
葫芦科植物嫁接机平台、苗木输送系统的设计及总装图
大件涂装线自行葫芦输送系统cad设计图
包树机设计说明书
目录1 研究背景及意义 (2)2 理论设计方案 (3)2.1底板运动机构设计 (4)2.2动力机构的设计 (4)2.3传动机构的设计 (5)2.4包树执行机构的设计 (6)2.4.1圆盘旋转机构的设计 (7)2.4.2排线机构的设计 (8)2.4.3绕线机构的设计 (8)3 功能与实用性分析 (9)3.1功能分析 (9)3.2实用性分析 (10)4样机功能分析及最终效果 (10)4.1包树机可实现功能 (10)4.2样机的整体效果图 (11)5 设计心得 (11)参考文献 (12)摘要:阐述了用于对绿化树木自动包绳以提高其防寒能力和移植成活率的包树机的设计过程以及在设计过程中遇到的一些问题,及设计者在制作自动包树机过程中的一些心得体会。
该包树机主要由底板运动机构、动力机构、传动机构、包树执行机构四部分组成。
关键词:自动包树机包树排线自动升降1 研究背景及意义城市绿化是当今环保的一项重要内容,于是树木的存活率就显得极其重要。
人工包树相当枯燥无味而且效率低下,然而市场上现有的绑树机存在许多缺陷,只有在移植树木时可用。
我们的机器很好的解决了这些问题。
如果该机器和升降装置相结合,便可以克服围栏等限制因素,随时随地方便地包树,如果在绕线动作上稍作改进,它还可以给树根包扎草绳,再加上它结构简单,成本低廉,所以它将是一款市场潜力巨大的环卫机械。
(上图为目前市场上相关产品)2 理论设计方案我们设计的自动包树机整体效果如下:图3图4整体效果图2.1底板运动机构的设计底板的主要功能为固定和连接其它四个功能装置,是包树机的移动及底座部分,其大小主要有其上主体部分决定。
其效果图如下底座效果图2.2动力机构的设计方案一:动力结构采用自带蓄电池和减速箱的驱动电机,其主要参数为驱动电机图方案二: 为便于长期连续使用,也可采用柴油机驱动,配合离合器和变速箱使用,技术参数与电动机相近。
2.3传动机构设计传动机构主要将动力传给包树执行机构及绕绳机构,由带轮,齿轮组,传动带组成,带传动机构实现相对较远距离的动力传送,齿轮组直接与圆盘旋转机构啮合实现圆盘的转动。
树苗劈接嫁接机器人机械系统设计与试验

树 苗嫁 接作 业仍 然延 续 传统 的手 工方 式 , 导致 劳动 强度 大 、 生产 效率 低 、 嫁接 苗木 的成 活率 也不 高 , 而 且
不适 应 种植 业 季节性 强 的特 点 , 难 以实现树 苗 育 苗 工 厂 化生 产 计 。有 关 树 苗 嫁 接机 器 人 的研 究 在 国 际上 尚未见 到报 道 , 中 国 见 诸 文 献 报 道 的研 究 主 要 集 中在 苗 木 力 学 特 性 试 验 - o 和苗 木 嫁 接 机 构设 两个 方 面。 “ 劈接 法 ” 是 树 苗嫁 接 的一种 主要 方式 , 多 用 于杨木 、 葡萄、 枣、 梨、 苹果、 柿子 等树 苗 , 其手 工 操作 流程 为 : ① 将 穗木 削成 正 双面楔 形 切 口; ②砧 木劈 成 一字 形劈 口 ; ③ 将穗 木插 入砧 木劈 口 , 使 砧木 横 断面 形成 层 和穗木 楔形 切 削 面形成 层 紧密接 合 , 若松 动 , 可 以捆绑 。本 文 以杨树 苗劈 接嫁接 为研 究对 象 , 模拟 手 工嫁接 作 业 , 研 制 出一 种树 苗嫁 接机 器人 样机 。
Vo 1 . 3 4 No. 1
Fe b.
2 01 3
文章 编 号 : 1 6 7 2— 6 8 7 1 ( 2 0 1 3 ) 0 1— 0 0 6 9— 0 3
树 苗 劈 接 嫁 接 机 器 人 机械 系统 设 计 与 试 验
孙 群, 赵栋杰 , 赵 颖
( 聊城大学 汽车与交通工程学 院 , 山东 聊 城 2 5 2 0 5 9 )
基金项 目: 山 东 省 自然 科 学 基 金 项 目( Z R 2 0 1 l E L 0 3 8, Z R 2 0 1 2 C Q 0 2 6 ) ; 山东 省高 等 学 校 科 技 计 划 基 金 项 目( j 1 1 L D 1 6 )
毕业设计(论文)-刮板输送机设计(全套含CAD图纸)

摘要刮板输送机是一种挠性牵引机构的连续输送机械,是为采煤工作面和采区巷道运煤布置的机械。
它的牵引机构是刮板链,承载装置是中部槽,刮板链安装在中部槽的槽面。
中部槽沿运输路线全线铺设,刮板链绕经机头、机尾的链轮接成封闭形置于中部槽中,与滚筒采煤机和输送机推移装置配套,实现落煤、装煤、运煤及推移输送机械化。
沿输送机全长都可向溜槽中装煤,装入中部槽中的煤被刮板链拖拉,在中部槽内滑行到卸载端卸下。
一般的刮板输送机能在25°以下的条件下使用。
刮板输送机在使用中要受拉、压、弯曲、冲击、摩擦和腐蚀等多种作用,因此,必须有足够的强度、刚度、耐磨和耐腐蚀性。
由于它的运输方式是物料和刮板链都在槽内滑行,因此运行阻力和磨损都很大。
但是,在采煤工作面运煤,目前还没有更好的机械可代替,只能从结构上、强度上和制造工艺上不断研究,使它更加完善、耐用。
刮板输送机是与大型综采工作面设备配套使用的液压支架、采煤机,完成把工作面采煤机采下的煤输送、转运到后续运输设备上的任务,并提供相应的连接手段。
本说明书主要介绍了输送机传动部的设计计算。
SGB630/220型输送机传动部主要是由电动机、减速箱和液力耦合器组成,该输送机内横向布置,电动机输出的动力经由三级圆锥圆柱齿轮的传动,最后驱动链轮转动。
此外,还对SGB630/220型输送机的使用与维护进行了说明,以便能更好的发挥该输送机的性能,达到最佳工作效果。
关键词:刮板输送机;减速器;机头部;机尾部;液力耦合器。
全套设计说明书,翻译,CAD图纸,联系153893706ABSTRACTScraper Conveyor is a continuous flexible traction transport machinery for mining coal face and Roadway layout of machinery.It's traction is the scraper chain, carrying equipment in the central trough, scraper chain installed in the central groove of the groove surface.Central groove along the transportation routes across the board laying around by the nose scraper chain, sprocket tail then placed into a closed-shaped central slot, with the passage of Shearer and conveyor equipment necessary, to achieve loading of coal, coal loading,over coal and transport mechanization.Along the full can to the chute conveyor are installed with coal, the coal is loaded into the central tank scraper chain drag, slide in the central tank to remove the uninstall side.General Scraper Conveyor function of the following conditions in the use of 25 °.Scraper conveyor in use are subject to tension, compression, bending, impact and corrosion and other effects of friction, therefore, must have sufficient strength, stiffness, wear and corrosion resistance.Because of its mode of transport is the material and the scraper chain sliding in slots, so running resistance and wear are great.However, coal in the coal face, There is no better machine can replace only from the structure, the intensity of ongoing research and manufacturing process to make it more perfect and durable.Reproduced large-scale machine is fully coal face with the equipment supporting the use of the Gate transmission, reproduced equipment, to complete the face conveyor sent to the coal transportation, transit facilities to follow up on the conveyor belt of tasks and to provide the appropriate means of connection. This manual introduces the conveyor drive on the design calculations.SGB630/150C type conveyor unit of AC is mainly motor, gear box and hydraulic coupler component, the dual-head conveyor drive motor output of the power transmission through three gears, final drive sprocket rotation.In addition, returning use for SGB630/220 scraper conveyor and maintenance proves, In order to be able to good full play performance of person who should mine, reach the best working result.Key words:scraper conveyor; reducer; machine head; aircraft tail; hydraulic coupler.1 概述近年来随着高产高效集约化矿井的迅速发展,煤矿都在争取实现一矿一井一面的高度集约化生产模式。
单行蔬菜钵体苗自动移栽机的设计—取苗装置设计
本科毕业设计(论文)通过答辩目录Abstract (3)第1章绪论 (6)1.1前言 (6)1.2国内外蔬菜钵苗取苗机构的发展概述 (8)1.2.1我国蔬菜钵苗移栽机械化发展概况 (8)1.2.2我国蔬菜钵苗移栽机存在的问题 (9)1.2.3我国蔬菜钵苗移栽机存在问题解决途径分析 (9)1.2.4国外蔬菜钵苗自动移栽机的发展和研究成果 (10)1.2.5蔬菜钵苗移栽机发展方向 (11)1.3国内取苗机构存在的主要问题和发展方向 (12)1.3.1国内取苗机构发展存在的主要问题 (12)1.3.2国内蔬菜取苗机构的发展方向 (12)1.4本文的研究目标 (13)1.5本文的主要工作及内容安排 (14)1.6本章小结 (14)第2章蔬菜钵苗取苗机构的运动学分析 (15)2.1取苗爪工作要求的实现 (15)2.2蔬菜钵苗取苗机械手的机构组成与工作原理 (16)2.3 椭圆齿轮传动的运动分析 (18)2.3.1 椭圆齿轮的啮合特性及优点 (18)2.3.2 椭圆齿轮的角位移、角速度和传动比分析 (19)2.4蔬菜钵苗取苗机械手运动学模型的建立 (21)2.4.1运动学分析符合的说明 (21)2.4.2蔬菜钵苗取苗机械手位移分析 (22)2.4.3机械手上各点位移方程和各构件角位移方程 (23)2.4.4 机构上各点的速度方程和各构件角速度方程 (25)2.4.5 机械手上各点的加度方程和各构件角加速度方程 (26)2.5本章小结 (28)第3章蔬菜钵体苗自动移栽机取苗机构的参数优化 (29)3.1优化目标与变量 (29)3.2辅助分析优化软件 (29)3.2.1人机交互简介 (30)3.2.2本课题人机交互软件介绍 (31)3.2.3椭圆齿轮参数计算 (31)3.2.4取苗机构参数优化步骤 (32)3.2.5取苗爪尖点的速度分析 (33)3.3本章小结 (35)第4章蔬菜钵苗自动移栽机取苗机构的结构设计 (36)4.1蔬菜钵体自动移栽机取苗机构的整体结构设计 (36)4.2取苗臂机构设计 (37)4.3 CAD软件介绍 (38)4.3.1 CAD二维取苗机构零件图 (39)浙江理工大学本科毕业设计4.4 Proe软件介绍 (40)4.4.1 三维Proe取苗机构零件图 (41)4.5总装配图 (42)4.6 本章小结 (43)第5章总结与展望 (44)5.1 总结 (44)5.2 进一步的展望 (45)致谢 (46)参考文献 (47)附录 (49)蔬菜钵体苗自动移栽机——取苗装置设计摘要移栽是蔬菜生产过程中的重要环节之一,移栽具有对气候的补偿作用和使作物生育提早的综合效益,可以充分利用光热资源,其经济效益和社会效益均非常可观。
134 大白菜收获机机械部分的设计—输送机构的设计(含全套说明书和CAD图纸)DOC
学校代码:10410序号:20050406 本科毕业论文题目:大白菜收获机机械部分的设计——输送机构的设计学院:工学院*名:***学号:********专业:机械设计制造及其自动化年级:机制051指导教师:肖丽萍二OO九年五月摘要随着新的农业生产模式和新技术的发展与应用,农业机器人将成为农业生产的主力军。
该文在分析大白菜收获机工作特点的基础上,从大白菜的采摘、转运、打包等方面进行分析。
其中主要对输送部分做了详细的说明。
该大白菜收获机适用于家用收割大白菜,结构简单、制造成本低。
该大白菜收获机的输送部分采用带式输送,而张紧装置作为带式输送机构中不可缺少的重要组成部分,对带式输送机的稳定运行有着至关重要的作用。
本文首先介绍了张紧装置的作用、类型,且设计了张紧装置的总体方案,对其主要零部件的设计和选型进行了说明。
所设计的张紧装置使用螺杆作为张紧执行元件,具有张紧力可调、结构简单、适应性强、控制方便、安全性能好等特点。
关键词:大白菜、收获机、带式输送、张紧装置、螺杆Designing Of Transporting MechanismFor C abbage Harvest MachineryFarm machinery robot is to become the capital ship of the agriculture.This paper introduced gathering ,transporting and packing cabbage,on the basis of the working peculiarity of the cabbage harvest machinery,and it mainly introduced its transporting mechanism. The cabbage harvest machinery is suitable to gather in the cabbage for family expenses.The cabbage harvest machinery use belt conveyors as its transporting mechanism,while Tensioning device, as an important and indispensable component of the belt conveyor, has a vital role to the stable operation of the belt conveyor . This paper introduces the role of the tensioning device,type,installation layout principles, and its development profile.And then raised the tension of the belt conveyor to the tension and take-up device requirements, on the basis the analysis of the principle of the transmission belt conveyor. In this paper, the main device design programme of the automatically tensioning device have been introduced, and descripte its main components for the design and selection of the note.The tensioning device use the screwstaff as the take-up of the implementation component.,with adjustable tension, simple, strong adaptability and control convenience, performance and safety and so on.Keywords:C abbage ;harvest machinery;Belt conveyors;tensioning;Screwstaff目 录绪论 ............................................................ - 1 -1 大白菜收获机的概述 (2)1.1大白菜收获机的总体结构设计 (2)1.2收获机提升运输装置设计 (3)1.2.1带式提升运输装置的设计 (3)1.2.2传动方案的设计 (3)1.2.3方案的优缺点 (4)1.3收获机输送部分结构设计 (4)1.4锁紧机构设计 (5)2 输送机构的设计 (7)2.1 输送机构的组成 (7)2.2 输送机构速度的确定 (8)2.2.张紧方案的确定 ................................................................................................................... - 9 -3. 张紧装置的工作过程 ....................................................................................................... - 10 -针对螺旋张紧的缺点,主要采取了以下措施: ....................... - 11 -(1) 在滚筒表面粘贴了橡胶层,加大摩擦系数,防止打滑; ......... - 11 -(2) 螺杆与支撑板采用小间隙配合,螺杆不容易后退; ............. - 11 -(3) 设计的滑架也可在机架上移动,螺杆生锈时,可通过移动滑架来调整张紧力。
基于机器视觉的蔬菜嫁接机自动上苗控制系统设计
基于机器视觉的蔬菜嫁接机自动上苗控制系统设计王哲禄;程向娇;尤文生【摘要】为了实现蔬菜嫁接机自动上苗并能根据嫁接苗参数信息进行筛选配对,提高嫁接苗成活率,首先根据自动上苗系统的工作原理和嫁接苗的农艺分析进行机器视觉采集系统构建,然后进行PLC控制系统的设计,最后完成上位机界面的制作.研究结果表明,机器视觉系统能够完成嫁接苗的苗径信息提取,自动上苗控制系统工作速度稳定,可满足设计要求.【期刊名称】《安徽农业科学》【年(卷),期】2019(047)007【总页数】3页(P218-220)【关键词】机器视觉;嫁接机;自动上苗;PLC【作者】王哲禄;程向娇;尤文生【作者单位】温州职业技术学院,浙江温州325035;温州职业技术学院,浙江温州325035;温州职业技术学院,浙江温州325035【正文语种】中文【中图分类】S233.74蔬菜嫁接机是由机电工程技术、自动化技术、蔬菜农艺技术相结合而产生的设施农业装置。
自动嫁接机能取代人的手工作业,用机械臂快速地完成夹取、切削和接合动作,实现砧木和接穗的嫁接动作,而且嫁接速度快、成活率高。
在农业设施比较发达的地区和国家,自动嫁接机具有广阔的市场应用前景[1-4]。
日本、韩国较早开发了嫁接机,嫁接自动化程度较高,相应的装备已经在企业得到了推广应用。
在中国自动嫁接机的研究主要是由中国农业大学、华南农业大学等高校率先进行,目前已先后开发出了2JSZ-600、2JC-350等样机,但是主要还是半自动化状态,靠人工上苗。
笔者以蔬菜嫁接机自动上苗为研究对象,采用机器视觉采集、提取嫁接苗的参数特征,引导机械臂进行嫁接苗的抓取实现自动上苗,有利于提高蔬菜嫁接自动化水平[5-8]。
1 系统构成工作原理典型的蔬菜嫁接机自动上苗装置的工作过程如图1所示,假设穴盘有3株苗,如a、b和c,依次按照顺序进行自动取苗和上苗[9-10]。
基于视觉的自动上苗控制系统的要求是在满足嫁接苗木农艺参数的条件下,进行筛选配对取苗和上苗。
瓜科嫁接苗自动回栽装置的设计与仿真

Vol.41 No. 2Feb. 2020第41卷第2期2020年2月中国农机化学报Journal of Chinese Agricultural MechanizationDOI : 10.13733力.jcam.issn.2095-5553.2020.02.09瓜科嫁接苗自动回栽装置的设计与仿真皇甫坤,张秀花(河北农业大学机电工程学院,河北保定,071000)摘要:嫁接苗回栽的质量水平与回栽装置的设计有关,通过对人手工回栽嫁接苗的运动分析,设计一种集吸持与镇压于一体的回栽装置,并对嫁接苗在回栽末端执行器的空间位置以及回栽精度进行分析;现已知土壤总孔隙度对嫁接苗的培育有关,土壤总孔隙度越大越有利于培育壮苗。
利用微量土体经验公式和土壤总孔隙度关系式,导出土壤总孔隙度与土壤 应力的关系式,并得出土壤的应力越大总孔隙度越大的结论。
通过分析镇压块镇压土壤后土壤受力情况,得出镇压块斜面角度对土壤应力有影响,并设计出30°、45°、60°斜面倾角的镇压块,利用EDEM 软件并选用ECM 颗粒模型对镇压后的基质土壤颗粒进行应力分析。
通过仿真分析得出45°镇压块镇压土壤后整体应力比其他两种角度的镇压块大,因此它的土壤总孔隙度最大,最有利于培育壮苗。
关键词:嫁接苗回栽;镇压块;壮苗;土壤总孔隙度;土壤应力中图分类号:S223.1: S616 文献标识码:A 文章编号:2095-5553 (2020) 02-0054-06皇甫坤,张秀花.瓜科嫁接苗自动回栽装置的设计与仿真[J1中国农机化学报,2020, 41(2): 54-59Huangfu Kun» Zhang Xiuhua. Design and simulation ofautomatic transplanting device for grafted seedlings ofcucurbitaceae [J]. Journal of Chinese Agricultural Mechanization, 2020, 41(2): 54 —590引言随着瓜科类蔬菜的消费量在蔬菜作物中比重的增加,瓜科蔬菜的产量影响着人们的日常生活和国民经 济的增长⑴。
四速电动葫芦机械系统的设计(三维建模CAD图纸)

脉动循环,对电动机产生一个除弹簧制动的轴向力以外的载荷制动轴向
力。当斜齿轮倾斜角一定时,轴向的力大小与载荷成正比,起吊载荷越大,
该轴向力也越大,产生的制动力矩也越大;反之亦然。它可以减小制动弹
簧的轴受力,制动瞬间产生的冲击减小,电动机轴受扭转的冲击也将减小,
尤其表现在起吊轻载荷时,从而提高了电动机轴的安全性。因此,选择 b
有关调查资料表明,65%的起重机械用户主要是为了提高生产率、减少 劳动工资、降低职工劳动强度。因而用户对起重机械的安全性、先进性、 适用性和自动化程度就提出了更高的要求,使起重机械的制造厂家面临更 加严峻的挑战。起重机械制造行业的发展趋势为设计、制作的计算机化、 自动化近年来,随着电子计算机的广泛应用,许多国外起重机制造商从应 用计算机辅助设计系统,提高到应用计算机进行起重机的模块化设计。起 重机采用模块单元化设计,不仅是一种设计方法的改革,而且将影响起重 机行业的技术、生产和管理水平,老产品的更新换代,新产品的研制速度都 将大大加快。对起重机的改进,只需针对几个需要修改的模块;设计新的起 重机只需选用不同的模块重新进行组合,提高通用化程度,可使单件小批 量的产品改换成相对大批量的模块生产。亦能以较少的模块形式,组合成 不同功能和不同规格的起重机,满足了市场的需求,提高了竞争能力。
2按齿面接触疲劳强度设计选择齿数取z113z2i1z1571374齿宽系数08初选螺旋角14初选载荷系数按齿轮非对称布置速度中等冲击载荷不大来选择输出功率pkw转速nrmin输出转矩tnm8432980817481198078477781719420857474775395517181492119083vi6681492113114kt1381410814n确定变位系数z112z268a20x1039x2038节点区域系数zhzh243重合度系数z纵向重合度3514tan13tan138端面重合度42由机械设计手册图1417查的重合度由图14119查得85螺旋角系数9814coscos接触疲劳极限lim由机械设计手册图14124查得大小齿轮的接触疲劳极限为hlim21160mpa应力循环次数n160n1104942接触疲劳寿命系数由机械设计手册图6410查得khn1108khn2114计算接触疲劳许用应力取失效概率为1安全系数s1lim110811601253mpahn11411601322mpa125313221288mpa3计算小齿轮分度圆直径d1t小齿轮分度圆直径d1t13814105551898246mm3245mm0816155512883245980601000601000选择精度等级根据圆周速度由机械设计手册64196420择齿轮精度等级为7级精度4计算齿宽b和模数mnt0832452596mmcos3245cos14242mm1314cos14cos2514cos计算载荷系数k使用系数ka125动载系数kv根据圆周速度v166kv11齿间载荷分配系数ha由图查得ha120齿间载荷分配系数k016103b129载荷系数kkkakvha12511120129212修正小齿轮直径2123245mm3558mm15计算模数mnmncos3558cos14mm265mm13safa44计算载荷载荷系数k129由图查得kakvha12511120127174齿轮的弯曲疲劳强度极fe由图查得mpafefe890齿形系数fa1314cos13coscos85cos应力修正系数sacossin20coscossin098尺寸系数取弯曲疲劳安全系数s146200870857mpa14fe88571mpa1414fesafa7089088585safa小齿轮的数值较大设计计算21750810098cos0007454m
西红柿嫁接机控制系统的设计
西红柿嫁接机控制系统的设计杨丽;张铁中【摘要】为实现西红柿苗嫁接的自动化,进行了西红柿嫁接机器人控制系统的开发设计.在对系统整体功能需求分析的基础上,进行了软硬件的合理分工,开发出了西红柿嫁接机器人控制系统的硬件电路和应用软件.实验表明,该控制系统工作可靠,操作方便,成本较低,能很好地完成嫁接机器人整个工作过程的控制,具有较好的市场前景.【期刊名称】《农机化研究》【年(卷),期】2008(000)012【总页数】4页(P79-82)【关键词】西红柿;嫁接;机器人;控制系统【作者】杨丽;张铁中【作者单位】中国农业大学,工学院,北京,100083;中国农业大学,工学院,北京,100083【正文语种】中文【中图分类】TP24;S1260 引言嫁接育苗技术具有抗病、抗虫、提高产量和改善品质等诸多好处,目前已广泛应用于葫芦科和茄果科蔬菜的保护地栽培中,是实现蔬菜生产优质、高产和稳产的重要措施[1]。
西红柿是我国最常食用的茄果类蔬菜之一,其栽培面积在我国仅次于黄瓜。
长期以来,西红柿是通过不断改良品种来克服各种病虫害的,但近年来随着连续栽培茬口密度的增加,西红柿的病虫害越来越严重,单靠改良品种已不能满足抗病增产的需要,必须通过嫁接育苗来抵抗连茬病虫害,提高产量。
据调查,目前北京地区西红柿苗的嫁接都采用手工操作,劳动强度大,效率低,嫁接苗成本高,而有关西红柿自动嫁接的研究工作未见相关报道。
基于市场需求及我国当前的国情,笔者对经济、实用型西红柿嫁接机器人的控制系统进行了研究。
1 控制系统功能分析西红柿嫁接机器人总体上由控制系统、动力系统及执行机构等3大部分构成,如图1所示。
控制系统控制电磁换向阀按一定的时序吸合和断开,电磁换向阀控制动力系统中的气缸组通气与排气,由气缸组驱动执行机构按预定的时序工作,从而自动完成从砧木和穗木苗供给、搬运、切削、夹合与排苗整个嫁接过程,如图2所示。
嫁接机器人的控制系统要完成的首要任务是控制终端执行机构(机械手),按程序设定的时序工作,准确地完成整个嫁接过程。
葫芦科营养钵苗单人操作嫁接机器人设计与试验

( b) 切削后穗木搬运
穗木夹持搬运机构的作用是完成对穗木苗的 夹持和搬运 , 以保证穗木的正常切削并搬运至指 定位置完成嫁接工作 。 目前国内外半自动嫁接机 都设有砧木 和 穗 木 供 苗 台 , 由两人分别将砧木和 穗木放到供 苗 台 上 , 然后由搬送机械手从供苗台 上将幼苗 夹 持 搬 送 到 切 苗 处 、 进 行 切 苗 嫁 接。 在 一人操作的 情 况 下 , 若沿用老方法设置供苗台将 会使机器结构分布松散 、 给操作带来不便 、 降低工 作效率 。 为此 , 本研究设计了集供苗台 、 搬送机械 手于一身的穗木夹持搬送机构 , 结构如图 2 所示 。 主要包括 : 机架 、 旋转气缸 、 直推气缸 、 直推气缸连 接板 、 穗木 检 测 传 感 器 、 穗 木 夹 持 气 爪、 穗木切削 支点等 。 具体工作过程如图 3 所示: 当操作人员将穗木 放置于穗木固定支板的豁口处时, 穗木检测传感器 检测到穗木苗到位, 随即穗木夹持气爪闭合夹持住 旋转气缸旋转 90° 将穗木细苗旋转搬运至切 穗木, 苗处进行切苗( 图 3a) 。当穗木苗切削完毕后, 旋转 气缸反向旋转 90° , 将已切削的穗木苗又旋回搬运 置供苗处原位, 然后直推气缸将穗木苗推送至嫁接 处进入嫁接过程( 图 3b) 。 根据工作环境及机构布局, 选定直推气缸工作 行程为 100 mm; 为保证完成穗木的夹持和搬运, 穗木 固定支板、 穗木气爪和穗木切削支点的相对位置必须 精确, 经理论计算及试验分析, 确定穗木固定支板上
葫芦科营养钵苗单人操作嫁接机器人设计与试验26313嫁接钵苗自动排列摆放机构fig13graftedseedlingbowlautoarrangingunit苗钵收纳盘苗嫁接完成后由人工放置于苗钵输送带上苗钵输送带将嫁接苗钵输送至苗钵收纳盘附近苗钵纵向位置传感器检测到嫁接苗钵后通过控制系统的识别判断嫁接钵苗应该推送的位置然后在推送线性组和苗钵推板的作业下推送至苗钵收纳盘中的指定位进行切削时如果穗木茎秆在切口附近弯曲过大容易造成切削后进行贴合时贴合失败不利于嫁接作业的顺利进行2来自0农业机
DTII型带式输送机毕业设计及图纸说明

托辊:材质、直径、间距等
驱动装置:电动机、减速器、联轴器等
滚筒:材质、直径、间距等
输送带:材质、宽度、厚度等
结构设计原则:满足输送要求、保证输送效 率、降低能耗等
图纸说明
图纸目录与说明
目录:列 出所有图 纸的名称 和编号
说明:对每 张图纸进行 详细说明, 包括设计目 的、主要部 件、工作原 理等
广泛应用于矿山、 冶金、建材、化工 等行业
工作原理
输送带:由橡胶、塑料等材料制成,用于承载物料 驱动装置:由电机、减速器等组成,用于驱动输送带运行 滚筒:用于支撑输送带,使其保持一定的张力和直线度 托辊:用于支撑输送带,防止输送带下垂和跑偏 拉紧装置:用于调整输送带的张力,保持输送带的稳定运行 控制系统:用于控制输送带的启动、停止、速度等参数,保证输送过程的
DTII型带式输送机毕业 设计及图纸说明
汇报人:
目录
DTII型带式输送机概 述
01
毕业设计内容
02
图纸说明
毕业设计总结与展望
03
04
DTII型带式输送 机概述
定义与用途
DTII型带式输送机 是一种连续输送物 料的机械设备
主要用于煤炭、矿 石、砂石等散装物 料的输送
具有结构简单、输 送能力大、能耗低 等特点
尺寸标注: 对图纸中 的尺寸进 行标注, 包括长度、 宽度、高 度等
材料选择: 对图纸中 的材料进 行选择, 包括材质、 规格、数 量等
装配图: 展示DTII 型带式输 送机的整 体结构和 装配关系
零件图: 展示DTII 型带式输 送机的各 个零件的 详细尺寸 和结构
零件明细表
驱动装置:电机型号、功率、 转速等
实际应用与展望
果园全程机械化来了!如何省工省力又高效

果园全程机械化来了!如何省工省力又高效打开今日头条,查看更多精彩图片铁锹挖坑栽树苗,爬梯子上树摘苹果,这是传统的果园劳作图,而今时代进步,农业现代化加速推进,国家大方针引导,果园尤其是大面积果园劳作方式变了——果园全程机械化来了。
从栽树到餐桌水果全程都用到哪些厉害的装备,您花三五分钟大致了解一下吧。
装备不分个头大小,重要的是省工省力又高效!果园动力机械各种拖拉机和同作业机械配套的内燃机、电动机;适于各种立地条件的果园运输机械如运输车、山地轨道运输机等。
拖拉机乘坐式履带搬运车果树苗圃专用机械大型育苗基地标准化生产作业必备。
播种机、嫁接膜切割机、嫁接机、起苗机和苗木捆扎机等。
苗木捆扎机果树挖坑栽植专用机械挖坑机、起垄机和开沟机等。
开沟机果园耕作、除草、土壤改良专用机械微耕机、旋耕机、行间割草机或碎草机、行内锄草机、土壤改良机等。
自走式履带旋耕机割草机行间碎草机果园施肥专用机械果园振动深松施肥机、有机肥施肥机、果园深度开沟施肥机、偏置式化肥施肥机、偏置式有机肥化肥施肥系统和高效精细弥雾机等。
有机肥撒肥机多功能施肥机果园灌溉专用机械微喷系统、滴灌灌溉系统、水肥一体化系统等。
滴灌水肥一体化果树整形修剪专用机械环剥或环割机、冬剪机、整株几何修剪机、单枝修剪机具(包括气动或电动修枝剪、高枝剪、动力圆盘锯和动力链锯等)、枝条粉碎机等。
葡萄树还需要绑蔓机、绑梢机、夏剪(剪梢)机等。
电动环割机修剪机枝条粉碎机果树授粉、疏花果、套袋专用机械果实套袋机、果实摘袋机、葡萄树还需要花穗果穗整形机或器具等。
苹果套袋机果园植保专用机械小动力植保机械、自走式植保机械和航空植保机械等。
选择要点:能够买得起并容易操作使用、高效精细喷雾。
风送弥雾机植保无人机果树越冬防寒专用机械北方地区葡萄等果树取土防寒埋藤机和防寒土清除机。
葡萄防寒埋藤机果品采收及采后商品化处理专用机械果实采收自动升降平台、机械传送带等,采后商品化处理环节包括清洗、分级、打蜡、无损检测、包装设备和烘干机等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘要目前在蔬菜种植中,由于营养钵育苗在移栽时对幼苗无损伤,所以有取代传统穴盘育苗的趋势。
为了满足营养钵育苗日益普遍的现状,研制新型嫁接机成为现在的一个热门课题。
本次设计的自动嫁接机针对的是采用营养钵育苗的葫芦科植物,实现了砧木苗在营养钵内无需拔苗即可直接的操作,有助于嫁接以后苗的恢复,在生产中具有较高的使用价值。
本次毕业设计是葫芦科植物自动嫁接机的苗木传输系统及平台。
通过分析原有各种嫁接机,我们决定选取传感器配合带式运输机作为苗木传输系统。
首先对嫁接机及其苗木传输系统和胶带输送机作了简单的概述;接着分析了带式输送机的选型原则及计算方法;然后根据这些设计准则与计算选型方法按照给定参数要求进行选型设计;接着对所选择的输送机各主要零部件进行了校核。
普通型带式输送机由六个主要部件组成:传动装置,机尾和导回装置,中部机架,拉紧装置以及胶带。
简单的说明了输送机的安装与维护。
最后说明了传感器的选择,平台的设计。
关键词:嫁接机;苗木传输系统;平台;带式输送机;选型设计;主要部件AbstractBecause the bowl seeding has no harm to the stock when transplanted, therefore it is used widely and tends to replace the hole seeding. In order to apply to the current increasing numbers for nutritional bowl seeding of vegetables, the development of new Grafting automatic machine now become a hot topic. The Grafting automatic machine is the cucurbitaceous vegetables which seedling in nutritional bowl.. It solves a difficult problem in vegetables’ grafting., therefore, has high value for use in vegetable production.The graduation project is the transmission system of grafting automatic machine and platform design. After all of the original graft machine, we decided to select the sensor with a belt conveyor as seedlings transmission system. At first, it is introduction about the grafting automatic machine, seedlings transmission system and the belt conveyor. After that the belt conveyor abase on the principle is designed. Then, it is checking computations about main component parts. The ordinary belt conveyor consists of six main parts: Drive Unit, Jib or Delivery End, Tail Ender Return End, Intermediate Structure, Loop Take-Up and Belt. At last, it is explanation about fix and safeguard of the belt conveyor.Keyword: Grafting automatic machine, seedlings transmission system , belt conveyor; Lectotype Design, main parts目录摘要 (I)Abstract (II)目录 (III)第一章引言 (1)1.1 课题目的意义 (1)1.2 葫芦科嫁接机的发展现状 (1)1.3 苗木传输系统的研究现状 (3)1.4 带式输送机的概述 (3)1.4.1 带式输送机的应用 (3)1.4.2 带式输送机的分类 (4)1.4.3 各式输送机的特点 (4)1.4.4 带式运输机的发展现状 (5)1.4.5 带式运输机的工作原理 (6)1.4.6 带式运输机的机构和布置形式 (8)1.5 传感器简介 (10)第二章带式输送机设计 (11)2.1带式输送机的设计计算 (11)2.1.1 已知原始数据及工作条件 (11)2.1.2 计算步骤 (12)2.1.2.1 带宽的确定: (12)2.1.2.2输送带宽度的核算 (15)2.1.3 圆周驱动力 (15)2.1.3.1 计算公式 (15)2.1.3.2 主要阻力计算 (16)2.1.3.3 主要特种阻力计算 (18)2.1.3.4 附加特种阻力计算 (18)2.1.3.5 倾斜阻力计算 (18)2.1.4传动功率计算 (18)P)计算 (18)2.1.4.1 传动轴功率(A2.1.4.2 电动机功率计算 (19)2.1.5 输送带张力计算 (20)2.1.5.1 输送带不打滑条件校核 (20)2.1.5.2 输送带下垂度校核 (21)2.1.6传动滚筒最大扭矩计算 (22)2.1.7 拉紧力计算 (23)2.1.8绳芯输送带强度校核计算 (23)2.2 驱动装置的选用与设计 (23)2.2.1 电机的选用 (24)2.2.2 联轴器 (25)2.3 带式输送机部件的选用 (26)2.3.1 输送带 (26)2.3.2 传动滚筒 (26)2.3.3 托辊 (27)2.3.4 制动装置 (28)2.3.5 拉紧装置 (28)2.4其他部件的选用 (29)2.4.1 机架与中间架 (29)2.4.2 电气及安全保护装置 (31)第三章传感器的选择 (33)3.1 传感器的概述 (33)3.1.1定义 (33)3.1.2 分类 (33)3.2 传感器的选择 (34)3.2.1 传感器的类型 (34)3.2.2 传感器水平间距 (34)3.2.3 传感器垂直间距 (34)3.2.4 传感器电源 (34)第四章平台设计 (35)4.1材料选取 (35)4.2 结构示意图 (35)4.3 联接方式 (35)第五章结论和建议 (36)5.1结论 (36)5.2 建议 (36)参考文献 (37)致谢 (39)第一章引言1.1 课题目的意义嫁接就是把两种幼苗安插、结合到一起的作业。
利用抗性强的砧木进行嫁接育苗,可大大增强抗病性(嫁接西瓜、黄瓜可防止枯萎病,嫁接茄子可防止黄萎病、根结线虫病,嫁接番茄可防止青枯病、枯萎病,一般嫁接苗防止土传病害的效果达89.6%~100%);同时,通过嫁接换根,还可使植株的抗寒性及耐热、耐湿、耐旱、吸肥能力大大提高,还可克服连作障碍,因而可显著增产,瓜类、茄果类嫁接后一般可增产20%以上,重病区可成倍增产。
嫁接机是一种集机械、自动控制与园艺技术于一体的机器。
它根据不同嫁接方法,把蔬菜苗茎秆直径为几毫米的砧木、穗木的嫁接为一体,使嫁接速度大幅度提高;同时由于砧、穗木接合迅速,避免了切口长时间氧化和苗内液体的流失,从而又可大大提高嫁接成活率。
因此,嫁接机被称为嫁接育苗的一场革命。
葫芦科植物是重要的蔬菜和水果植物,例如黄瓜、西瓜等,其嫁接机系统的研究,将会大幅度的提高生产率,减轻农民的劳动强度。
1.2 葫芦科嫁接机的发展现状国外蔬菜嫁接机研究现状。
在日本,西瓜、黄瓜、茄子靠嫁接栽培的分别达到l00%、90%、96%,每年大约嫁接10多亿棵。
从1986年起,日本开始了对嫁接机器人的研究,以日本“生物系特定产业技术研究推进机构”为主,一些大的农业机械制造商参加了研究开发,其成果已开始在一些农协的育苗中心使用。
由于看到了蔬菜嫁接自动化及嫁接机器人技术在农业生产上的广阔前景,日本一些实力雄厚的厂家如YANM A、M 1TSUBISHI等也竞相研究开发自己的嫁接机器人,嫁接对象涉及西瓜、黄瓜、西红柿等。
日本研制开发的嫁接机有较高的自动化水平,但机器体积庞大,结构复杂,价格昂贵。
20世纪90年代初,韩国也开始了对自动化嫁接技术的研究,但其研究开发的技术,只是完成部分嫁接作业的机械操作,自动化水平较低,速度慢,而且对砧、穗木苗的粗细程度有较严格的要求,不适于工厂化的大规模嫁接生产。
在欧洲的意大利、法国、荷兰等农业发达国家,蔬菜的嫁接育苗相当普遍,大规模的工厂化育苗中心每年向用户提供嫁接苗。
但这些国家尚无自己的嫁接机技术和产品,嫁接作业大部分停留在手工嫁接的水平上,极少地方使用日本的嫁接机器。
我国蔬菜嫁接机研究现状。
嫁接栽培技术已在我国日光温室、大棚等设施瓜类蔬菜生产中得到推广应用。
但到目前为止,我国蔬菜嫁接都是采用人工方法,瓜类蔬菜的手工嫁接,有靠接、插接等方法。
蔬菜嫁接是一项时间紧迫、作业量浩大的工作。
例如,栽培1亩地黄瓜需要3500~4000株苗,而幼苗适于嫁接的时间只有3~5天,一个熟练的操作者平均每分钟只能嫁接l~2株。
为争取速度,加快进度,人们需要长时间地连续嫁接,甚至通宵达旦地工作。
嫁接苗的砧木苗直径在3~4 毫米左右,穗木苗直径只有l~2毫米,加之幼苗脆嫩细弱,所以嫁接起来很耗费精力。
而且,每个人所掌握的嫁接技术要领、手法及熟练程度不同,难以保证高的嫁接质量和高的成活率。
由于费工费时,在有些地区,又出现了放弃嫁接栽培的现象,取而代之的是大量施用农药、杀虫剂、杀菌剂。
这样不但造成了浪费,更严重的是污染了蔬菜,破坏了环境,对人类健康构成威胁。
蔬菜的手工嫁接效率低、劳动强度大、嫁接苗成活率低,已远远不能适应我国农业生产的要求。
因此,在我国发展机械化、自动化的嫁接技术势在必行。
目前,我国主要有两种蔬菜嫁接机。
一种是由长春裕丰自动化技术责任有限公司与中国农业大学合作,利用日本、韩国专利技术研制了“蔬菜半自动嫁接机”,主要用于黄瓜苗、西葫芦苗和西瓜苗嫁接,也可用于番茄苗、茄子苗嫁接。
它采用的是靠接法。
先取出砧木苗,置于嫁接机左侧的压苗片中。
然后从育苗穴盘中取出接穗苗,置于嫁接机右侧的压苗片中。
机器启动后,自动进行夹苗、切口、结合等动作,并用嫁接夹从右侧夹住已嫁接的苗子。