点云地面分割代码
一种基于栅格投影的快速地面点云分割算法

中图分类号:P225.2
No.3
文献标识码:A
一种基于栅格投影的快速地面点云分割算法
邹兵 ∗ ꎬ陈鹏ꎬ刘登洪
( 重庆市勘测院ꎬ重庆 401520)
摘 要:针对激光雷达不同类型点云在不同场景下存在地面点云过分割和欠分割的问题ꎬ本文提出一种能够适用于
不同类型点云的地面分割算法ꎬ该算法先将原始点云栅格化ꎬ然后计算栅格单元高度差、平均高度和高度方差信息ꎬ综
都出现了不同程度的过分割或者欠分割ꎬ文献[ 3] 基
果ꎬ然而文献[3] 基于物理排序的方法不再适用ꎬ同时
苛ꎬ导致地面分割不彻底ꎬ然而文献[ 10] 基于平面模
步表明本文算法的有效性ꎮ
型拟合的算法ꎬ因需要设置点到平面的距离阈值参数ꎬ
导致在地面点和非地面点交接处分割效果不理想ꎬ将
非地面点云判定为地面点ꎬ导致过分割ꎮ
合三个分割指标实现地面点云准确快速分割ꎮ 分别采用 KITTI 开源数据集和实测数据进行实验验证ꎬ结果表明本文
算法针对不同类 型 点 云 在 不 同 场 景 下 均 实 现 了 良 好 的 地 面 分 割 效 果ꎬ 平 均 分 割 准 确 度 达 到 99 10%ꎬ 平 均 耗 时
13.169 7 msꎬ提升了自动驾驶汽车感知系统的鲁棒性和实时性能ꎮ
(2) 计算栅格单元 ceil( iꎬj) 的高度差:
Z diff( iꎬj) = z max -z min
(3)
式中ꎬz max 和 z min 分别为栅格单元 ceil( iꎬj) 的高度
的最大值和最小值ꎬ为了抵抗点云噪声影响ꎬ本文选取
图 2 本文算法分割效果( 红色为地面点云ꎬ绿色为非地面点云)
第3期
邹兵等 一种基于栅格投影的快速地面点云分割算法
python pcd去除地面点算法

处理点云数据时,一个常见的任务是去除地面点。
这通常用于在三维重建或点云分析中,以减少不必要的地面点并简化数据集。
以下是一个基本的算法,使用Python和PCL库(Python Point Cloud Library)去除地面点。
首先,你需要安装python-pcl库。
如果你还没有安装,可以使用pip进行安装:bashpip install python-pcl然后,你可以使用以下代码来去除地面点:pythonimport pclimport numpy as npdef remove_ground_plane(cloud, ground_normal_threshold=0.01):# 创建一个法线估算对象ne = cloud.make_NormalEstimation()tree = cloud.make_kdtree()ne.set_SearchMethod(tree)ne.set_RadiusSearch(0.03) # 设置为半径搜索的参数cloud_normals = pute() # 计算法线# 创建一个地面平面估计对象gp3 = cloud_normals.make_GroundPlaneEstimation()gp3.set_NormalDistanceWeight(0.1) # 设置法线距离权重gp3.set_Method(mon.methods.天堂四面体) # 设置方法为天堂四面体gp3.set_SearchRadius(0.02) # 设置搜索半径gp3.set_InputCloud(cloud) # 设置输入的点云数据gp3.set_InputNormals(cloud_normals) # 设置输入的法线数据plane = gp3.process() # 计算地面平面参数# 如果平面距离小于阈值,则认为该点为地面点,进行去除ground_plane = plane.get_plane()if ground_plane.get_distance_to_plane(cloud.get_centroid()) < ground_normal_threshold:return cloud.get_filtered_indices() # 返回地面点的索引列表else:return [] # 如果不满足条件,返回空列表在这个代码中,remove_ground_plane函数接收一个点云对象和一个法线阈值作为输入。
chapter08_地面三维激光雷达点云分割与分类
图 8.4 模糊 C-均值聚类
(3) 均值飘移聚类(Mean-Shift)。
5
均值飘移聚类是基于密度的聚类算法,它没有假定聚类中心,均值漂移过 程不需要预先给出类别数目,而是根据点集自身的密度分布探测获得类簇,发 现任意形状的簇,在聚类过程中自动确定类别数。 对于一个欧式空间内的点集,无参密度估计方法根据一个点周围一个小区 域内点的分布情况来估计点集中该点位置的密度;类似的,均值飘移聚类对空 间中某一位置密度梯度的估计采用统计该位置周围小区域内的点的分布状况。 空间中任意位置梯度的方向即是密度增加最快的方向。均值飘移聚类根据梯度 将空间中的点沿梯度方向不断移动,直到梯度为零。最终散布在整个空间的点 移动到模式点的地方。每个这样的点是所有移动到它的点所覆盖的区域内密度 最大的点,该处的梯度为零。 Mean-shift 的 定 义 为 : 给 定 的 d 维 欧 式 空 间 R d , 对 于 点 数 据 集 = S {xi,,,, = i 1 2 … n} ,带有核函数 K ( x ) 和核窗口范围 h 的多元核密度估计函 数为: f (x ) = 1 nh d
N
∑u
i =1
N
m ij
(式 8-3)
u ij =
1
∑( x
p k =1
i
−cj
xi − c k
)
2 m −1
(式 8-4)
一般地,模糊聚类的算法可表述为: 1) 确定划分的类数 C ,设置迭代阈值 ε ; 2) 初始化模糊划分矩阵 µ ij ;
(t )
3) 根据模糊划分矩阵计算各类的类中心 c j ; 4) 根 据 目 标 函 数 J 的 约 束 , 更 新 模 糊 划 分 矩 阵 µ ij
6
点云常用分割方法
点云常⽤分割⽅法点云分割 点云分割可谓点云处理的精髓,也是三维图像相对⼆维图像最⼤优势的体现。
点云分割的⽬的是提取点云中的不同物体,从⽽实现分⽽治之,突出重点,单独处理的⽬的。
⽽在现实点云数据中,往往对场景中的物体有⼀定先验知识。
⽐如:桌⾯墙⾯多半是⼤平⾯,桌上的罐⼦应该是圆柱体,长⽅体的盒⼦可能是⽜奶盒......对于复杂场景中的物体,其⼏何外形可以归结于简单的⼏何形状。
这为分割带来了巨⼤的便利,因为简单⼏何形状是可以⽤⽅程来描述的,或者说,可以⽤有限的参数来描述复杂的物体。
⽽⽅程则代表的物体的拓扑抽象。
于是,RanSaC算法可以很好的将此类物体分割出来。
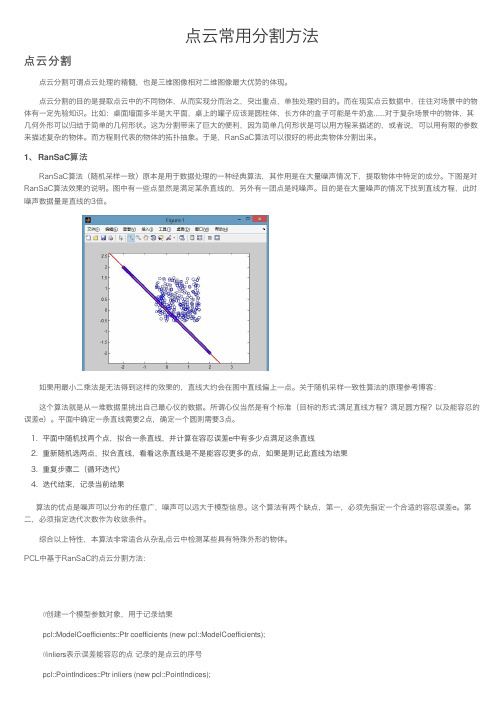
1、RanSaC算法 RanSaC算法(随机采样⼀致)原本是⽤于数据处理的⼀种经典算法,其作⽤是在⼤量噪声情况下,提取物体中特定的成分。
下图是对RanSaC算法效果的说明。
图中有⼀些点显然是满⾜某条直线的,另外有⼀团点是纯噪声。
⽬的是在⼤量噪声的情况下找到直线⽅程,此时噪声数据量是直线的3倍。
如果⽤最⼩⼆乘法是⽆法得到这样的效果的,直线⼤约会在图中直线偏上⼀点。
关于随机采样⼀致性算法的原理参考博客: 这个算法就是从⼀堆数据⾥挑出⾃⼰最⼼仪的数据。
所谓⼼仪当然是有个标准(⽬标的形式:满⾜直线⽅程?满⾜圆⽅程?以及能容忍的误差e)。
平⾯中确定⼀条直线需要2点,确定⼀个圆则需要3点。
1. 平⾯中随机找两个点,拟合⼀条直线,并计算在容忍误差e中有多少点满⾜这条直线2. 重新随机选两点,拟合直线,看看这条直线是不是能容忍更多的点,如果是则记此直线为结果3. 重复步骤⼆(循环迭代)4. 迭代结束,记录当前结果算法的优点是噪声可以分布的任意⼴,噪声可以远⼤于模型信息。
这个算法有两个缺点,第⼀,必须先指定⼀个合适的容忍误差e。
第⼆,必须指定迭代次数作为收敛条件。
综合以上特性,本算法⾮常适合从杂乱点云中检测某些具有特殊外形的物体。
PCL中基于RanSaC的点云分割⽅法:1. //创建⼀个模型参数对象,⽤于记录结果2. pcl::ModelCoefficients::Ptr coefficients (new pcl::ModelCoefficients);3. //inliers表⽰误差能容忍的点记录的是点云的序号4. pcl::PointIndices::Ptr inliers (new pcl::PointIndices);5. // 创建⼀个分割器6. pcl::SACSegmentation<pcl::PointXYZ> seg;7. // Optional8. seg.setOptimizeCoefficients (true);9. // Mandatory-设置⽬标⼏何形状0. seg.setModelType (pcl::SACMODEL_PLANE);1. //分割⽅法:随机采样法2. seg.setMethodType (pcl::SAC_RANSAC);3. //设置误差容忍范围4. seg.setDistanceThreshold (0.01);5. //输⼊点云6. seg.setInputCloud (cloud);7. //分割点云8. seg.segment (*inliers, *coefficients);除了平⾯以外,PCL⼏乎⽀持所有的⼏何形状。
LiDAR360软件地基点云数据单木分割
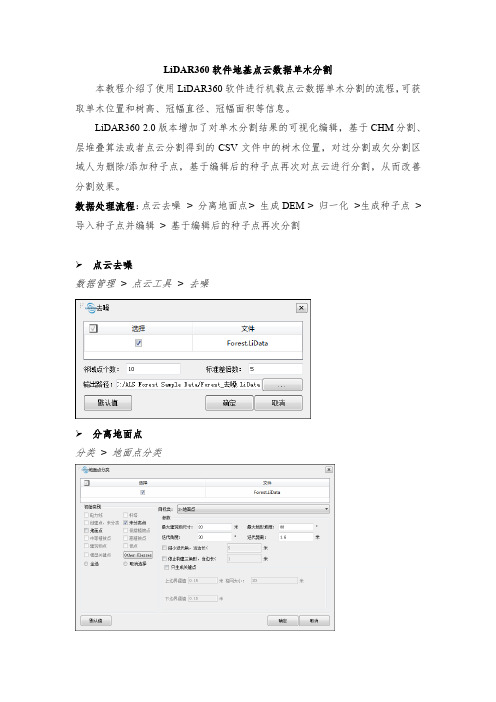
LiDAR360软件地基点云数据单木分割本教程介绍了使用LiDAR360软件进行机载点云数据单木分割的流程,可获取单木位置和树高、冠幅直径、冠幅面积等信息。
LiDAR360 2.0版本增加了对单木分割结果的可视化编辑,基于CHM分割、层堆叠算法或者点云分割得到的CSV文件中的树木位置,对过分割或欠分割区域人为删除/添加种子点,基于编辑后的种子点再次对点云进行分割,从而改善分割效果。
数据处理流程:点云去噪>分离地面点>生成DEM >归一化>生成种子点>导入种子点并编辑> 基于编辑后的种子点再次分割➢点云去噪数据管理> 点云工具> 去噪➢分离地面点分类> 地面点分类LiDAR360 2.0版本对地面点滤波的效果进行了改进,同时界面上增加了两个阈值设置和只生成模型关键点的复选框:✧减小迭代角,当边长<:当三角形的边长小于给定的阈值时,相应减小迭代角度;✧停止构建三角形,当边长<:当三角形的边长小于给定的阈值时,停止此区域的三角形迭代。
生成模型关键点的目的在于保留地形上的关键点而相对抽稀平缓地面区域的点,从而得到保留地形上关键点的稀疏点集。
在建立DEM模型时既可以保证地形不损失,又可以相对提高速率。
相关阈值设置如下:✧上边界阈值:由原始点所组成的三角网模型上所允许的最大高程容差值,简单来讲,此值设置越大,提取的模型关键点越稀疏,反之,越密。
✧下边界阈值:由原始点所组成的三角网模型下所允许的最大高程容差值,简单来讲,此值设置越大,提取的模型关键点越稀疏,反之,越密。
✧格网大小:保证提取模型关键点之后的密度,在平坦地区也能保证所设置的点密度。
例如,想要保证每隔10m有一个点那么就将此值设置为10。
➢生成DEM地形> 数字高程模型➢归一化数据管理> 点云工具> 归一化➢生成种子点生成种子点的方式有2种:1)层堆叠算法;2)基于CHM分割。
车载点云地面提取优化

车载点云地面提取优化车载点云地面提取优化车载点云地面提取是一项重要的任务,可以用于高精度地图制作、自动驾驶和交通监控等应用。
在本文中,我将逐步介绍车载点云地面提取的优化方法。
第一步是数据预处理。
我们需要从车载传感器(如激光雷达)获取原始点云数据。
这些数据通常包含大量的噪声和无效点。
在进行地面提取之前,我们需要对数据进行滤波和去噪处理,以减少这些干扰因素的影响。
第二步是点云分割。
在这一步中,我们将点云数据分割成地面和非地面两个部分。
传统的方法是使用统计特征(如点的高度和法向量)来进行分割。
然而,这些方法通常无法处理复杂的道路结构和地形变化。
因此,我们需要采用更先进的算法,如基于深度学习的方法,来提高地面提取的准确性和鲁棒性。
第三步是地面平面拟合。
在这一步中,我们将对地面点云进行平面拟合,以估计地面的几何模型。
常用的拟合方法包括最小二乘法和最小二乘平面拟合。
通过拟合得到的地面模型,我们可以进一步分析地面的特征和属性。
第四步是地面点云优化。
在这一步中,我们将对地面点云进行优化,以提高地面提取的精度和完整性。
优化的方法包括基于几何特征的点云重采样、点云配准和点云融合等。
通过优化,我们可以消除地面点云中的噪声和伪影,提高地面提取的质量。
最后一步是结果评估和验证。
在这一步中,我们将对提取得到的地面进行评估和验证。
评估的指标包括地面点云的覆盖率、准确性和鲁棒性等。
通过评估和验证,我们可以了解地面提取算法的性能和局限性,并进一步改进和优化算法。
总之,车载点云地面提取是一个复杂而关键的任务。
通过数据预处理、点云分割、地面平面拟合、地面点云优化和结果评估等步骤,我们可以提高地面提取的准确性和鲁棒性,为自动驾驶和交通监控等应用提供更可靠的基础。
matlab点云分割算法
matlab点云分割算法点云分割是计算机视觉和机器人技术领域中的重要任务,用于将点云数据集划分为具有不同属性或结构的子集。
MATLAB是一种功能强大的编程语言和环境,提供了丰富的工具箱和函数,可用于点云处理和分析。
本文将介绍如何使用MATLAB实现点云分割算法,并提供一个示例以展示其应用。
一、介绍点云是由三维空间中的大量点构成的集合,可用于表示物体的表面形状或场景的几何结构。
在许多应用中,需要对点云进行分割,以识别不同的物体或场景元素。
点云分割算法可以将点云数据集划分为具有相似属性或结构的子集,从而便于后续处理和分析。
二、MATLAB点云处理工具箱MATLAB提供了点云处理工具箱,其中包含了许多用于点云处理和分割的函数和工具。
使用这些函数和工具,可以实现从点云数据中提取特征、计算点云间的距离、拟合曲线和平面等操作,进而实现点云的分割和识别。
三、MATLAB点云分割算法MATLAB点云处理工具箱中包含了一些常用的点云分割算法,例如基于区域的生长算法、基于聚类的算法、基于曲率的算法等。
在实际应用中,可以根据点云数据的特点和分割需求选择合适的算法。
下面以基于区域的生长算法为例进行说明。
(此处可以进一步展开,详细介绍算法原理和步骤,以及如何使用MATLAB实现算法)四、示例应用为了更好地理解MATLAB点云分割算法的应用,下面给出一个实际的示例。
假设有一个点云数据集表示一个室内场景,我们希望将该点云分割为墙壁、地板和家具等不同的子集。
(可以描述具体的数据集,展示如何使用MATLAB进行点云分割的过程,并给出实验结果和分割效果的评估)五、总结本文介绍了MATLAB点云分割算法的基本概念和方法,并提供了一个示例以展示其应用。
通过使用MATLAB点云处理工具箱中丰富的函数和工具,我们可以轻松实现点云分割任务,并应用于计算机视觉和机器人技术等领域。
(可以总结算法的优势和不足,并展望未来的发展方向)六、参考文献[1] XYZ, "Title of the Paper", Journal name, year.[2] ABC, "Title of the Book", Publisher, year.(列出参考文献,供读者进一步学习和研究)以上是对MATLAB点云分割算法的简要介绍和应用示例。
pcl分割算法

PCL(Point Cloud Library)中常用的点云分割方法有:1. Planar model segmentation(平面模型分割):该算法能够把地面等一些平面给分割出来,方便后面的物体的点云分割。
2. Cylinder model segmentation(圆柱模型分割):该算法能够把一些圆柱体分割出来,方便后面的物体的点云分割。
3. Euclidean Cluster Extraction(欧几里德聚类提取):通俗来讲就是先从点云中找出一个点p0,然后寻找p0周围最近的n个点,如果这n个点与p0之间的距离小于预先设定的阈值,那么就把这个点取出,依次重复。
4. Region growing segmentation(区域蔓延分割):对于普通点云,其可由法线、曲率估计算法获得其法线和曲率值。
通过法线和曲率来判断某点是否属于该类,向周边蔓延直至完成。
5. pcl::RegionGrowing:使用了一种基于区域增长的方法来分割点云数据,该算法使用一种增长策略,将种子点作为开始点,不断将邻近点添加到同一个区域中。
6. pcl::RegionGrowingRGB:基于RGB颜色信息进行区域生长分割的模块,它基于局部颜色相似性度量邻域内点之间的相似性,并在此基础上将相似的点合并成一个聚类。
7. pcl::SACSegmentation:用于估计点云中符合特定模型的参数以及对应的点集。
它支持对于多种基础的模型进行拟合,如平面、球、圆柱、圆锥等。
SACSegmentation采用随机抽样一致性(RANSAC)算法来实现,可以在噪声点云数据中快速鲁棒地估计模型参数。
以上信息仅供参考,如需了解更多信息,请查阅PCL官方文档或咨询专业人士。
点云地面提取算法种类-概述说明以及解释

点云地面提取算法种类-概述说明以及解释1.引言1.1 概述点云地面提取是一项重要的计算机视觉任务,它在许多领域中具有广泛的应用,例如无人驾驶、三维建模和地图制作等。
地面提取算法的目的是将三维点云数据中的地面点和非地面点进行有效区分,以便后续的处理和分析。
在过去的几年里,随着深度学习等技术的快速发展,地面提取算法也取得了长足的进步。
本文将系统性地介绍点云地面提取算法的各种方法和技术,以帮助读者更好地了解和应用这一领域的最新进展。
1.2 文章结构本文主要分为三个部分:引言、正文和结论。
在引言部分,将首先介绍点云地面提取算法的概念和意义,然后对整篇文章的结构和内容进行概述,最后明确本文的目的和意义。
在正文部分,将详细介绍点云地面提取算法的概述,包括其基本原理和分类。
然后分别介绍基于几何特征和基于深度学习的地面提取算法,并对它们进行详细分析和比较。
在结论部分,将对本文的内容进行总结,分析不同算法的优劣势,并展望未来点云地面提取算法的发展方向和应用前景。
1.3 目的本文旨在对点云地面提取算法的种类进行系统性的介绍和总结,旨在帮助读者更好地了解不同类型的地面提取算法的优缺点、适用场景以及发展趋势。
通过对基于几何特征和基于深度学习的地面提取算法的分析比较,读者可以更全面地了解这两类算法在点云数据处理中的应用现状,为进一步的研究和实践提供参考和指导。
同时,本文也对地面提取算法的未来发展进行展望,探讨可能的研究方向和优化思路,以期能够促进点云地面提取算法的不断创新和提高。
2.正文2.1 点云地面提取算法概述点云地面提取算法是一种用于从点云数据中提取地面信息的关键技术。
在地理信息系统、自动驾驶、三维建模等领域中,点云地面提取算法起着至关重要的作用。
点云地面提取算法的基本思想是根据点云数据中点的特征,将地面点和非地面点进行有效区分。
通过对点云数据进行分割和分类,可以得到地面点的集合,从而构建地面模型。
在点云地面提取算法中,常见的方法包括基于几何特征和基于深度学习的算法。
地面三维激光扫描点云数据处理及建模
地面三维激光扫描点云数据处理及建模
地面三维激光扫描点云数据处理和建模是一种基于激光扫描技术获取地面三维点云数据,并对其进行处理和建模的方法。
该方法可以广泛应用于地理测绘、城市规划、环境监
测等领域。
激光扫描技术是通过激光雷达设备对地面进行扫描,得到点云数据。
点云数据是由一
系列包含位置和反射强度信息的点组成的三维空间数据。
激光扫描仪通过发射激光束,测
量激光束与地面的反射时间,并通过测量时间和激光的速度计算地面点的位置。
在获取点云数据后,需要对其进行处理。
点云数据处理包括数据滤波、配准和分割等
步骤。
数据滤波是为了去除噪声点,提取出地面点。
常用的滤波算法有高斯滤波、中值滤
波等。
配准是将多个局部点云数据对齐到一个全局坐标系中,常用的配准方法有ICP算法、基于特征的配准算法等。
分割是将地面点云数据从非地面点云数据中分离出来,常用的分
割算法有基于高度阈值的分割算法、基于形状特征的分割算法等。
在点云数据处理完成后,可以进行点云数据的建模。
点云建模是将点云数据转化为三
维模型的过程。
常见的点云建模方法有曲面重建、拟合和三角化等。
曲面重建是将点云数
据插值为连续的曲面模型,常用的方法有贝塞尔曲面重建、Marching Cubes算法等。
拟合是将点云数据拟合为简化的几何模型,常用的方法有平面拟合、圆柱拟合等。
三角化是将
点云数据转化为三角形网格模型,常用的方法有Delaunay三角剖分、网格化等。
点云地面分割算法
点云地面分割算法点云地面分割算法是计算机视觉领域中的一项重要任务,它旨在将点云数据中的地面点与非地面点进行区分和分割。
点云地面分割算法在地理信息系统、无人驾驶、机器人导航等领域有着广泛的应用。
在点云地面分割算法中,首先需要对点云数据进行预处理,包括点云滤波、去噪和采样等操作。
接着,常用的地面分割算法主要有基于几何特征的方法和基于机器学习的方法。
基于几何特征的地面分割算法主要利用地面平面的特点进行分割。
一种常用的方法是利用RANSAC(Random Sample Consensus)算法拟合地面平面。
RANSAC算法通过随机采样的方式选择部分数据点,然后拟合一个平面模型,并计算出与该模型拟合程度最好的数据点集合。
该算法迭代多次,最终得到地面平面的参数。
然后,通过计算每个点到地面平面的垂直距离,将距离小于一定阈值的点划分为地面点。
这种方法简单高效,适用于平坦地面的场景。
基于机器学习的地面分割算法则是利用机器学习模型对点云数据进行分类和分割。
常用的方法包括支持向量机(SVM)、深度学习和随机森林等。
这些方法通过对已标注的点云数据进行训练,学习地面点和非地面点的特征,并对新的点云数据进行分类。
这种方法需要大量的标注数据和计算资源,但在复杂地形和噪声较多的场景中具有较好的鲁棒性和准确性。
除了上述基于几何特征和机器学习的方法,还有一些改进的地面分割算法被提出。
例如,一些算法结合了几何特征和机器学习方法,通过多种特征融合来实现更准确的地面分割。
另外,一些算法利用时序信息,通过点云序列的连续性来提高地面分割的性能。
这些算法的提出使得地面分割在各种复杂场景下都能取得较好的效果。
点云地面分割算法是计算机视觉领域中的一项重要任务。
通过对点云数据的预处理和特征提取,结合几何特征和机器学习方法,可以有效地实现地面点和非地面点的分割。
随着算法的不断改进和发展,点云地面分割在地理信息系统、无人驾驶、机器人导航等领域的应用将会越来越广泛。
python点云地面点滤波(Pr...

python点云地⾯点滤波(Pr...⽬录1. 引⾔2. Morphological Filters(形态学滤波)2.1 膨胀/腐蚀2.2 形态学滤波3. Progressive Morphological Filters3.1 参数计算(窗⼝尺⼨/⾼程差阈值)3.1.1 窗⼝尺⼨3.1.2 ⾼程差阈值3.2 参数输⼊/输出3.2.1 参数输⼊3.2.1 参数输出3.3 PCL官⽅⽰例代码本篇博客参考Keqi Zhang的⽂章“”以去除⼤型建筑、树⽊等常见地物。
不⽅便的⼩伙伴可以在此:。
1. 引⾔机载LiDAR可以获取快速、低成本地获取⼤区域的⾼精度地形测量值。
为了获取⾼精度DTM/DEM需要区分测量点中的地⾯点(由地⾯直接返回)及⾮地⾯点(建筑、车、植被)。
众多学者采⽤了各种各样的⽅法来进⾏"点云地⾯点滤波"。
(此篇博客中也进⾏了相关介绍,不再骜述)2. Morphological Filters(形态学滤波)2.1 膨胀/腐蚀膨胀/腐蚀是其中的两个基础操作,通俗的说膨胀/腐蚀可以扩⼤/减⼩特征的尺⼨,并以此组合为开/闭操作。
针对LiDAR测量点p(x, y, z),⾼程 z 值在(x, y)处对应的膨胀操作可以定义为:式中:(xp, yp, zp) 代表p点的相邻点,w为操作窗⼝(可以为⼀维“线”也可以为⼆维“矩形/圆/其他形状等”)。
膨胀操作完成后会输出p点在窗⼝w内具有最⼤⾼程值的近邻点。
与之类似的,腐蚀操作为在p点窗⼝w内找到具有最低⾼程值的近邻点。
可以通过下式进⾏定义:了解膨胀/腐蚀这两个基础操作之后,可以通过对其进⾏简单组合来来形成开/闭操作,其中开操作为先进⾏腐蚀再进⾏膨胀操作,⽽闭操作为先膨胀再进⾏腐蚀。
在LiDAR数据处理中使⽤了“开”操作,处理效果如下图中所⽰:可以从图中得知:“虚线”是先进⾏“腐蚀”操作所形成的表⾯,这个表⾯剔除了“树⽊”点,但是⼤型建筑物却变得不完整。
CAD中的点云处理和扫描数据导入方法
CAD中的点云处理和扫描数据导入方法点云是一种用于捕捉现实世界几何形状的数据集,它可以通过使用三维激光扫描仪等设备获取。
在CAD软件中,点云可以用于各种用途,例如建筑设计、产品设计和工程项目等。
本文将介绍CAD中的点云处理和扫描数据导入方法,帮助您更好地利用点云数据。
首先,我们需要将点云数据导入到CAD软件中。
不同的CAD软件支持不同的点云数据格式,例如.PCD、.PLY和.LAS等。
在导入之前,您需要将点云数据转换为CAD软件支持的格式。
您可以使用点云处理软件或者在线转换工具将点云数据转换为所需格式。
导入点云数据后,您可以开始进行点云的处理。
以下是一些常见的点云处理方法:1. 点云滤波:点云数据通常包含大量的噪点和无用信息。
通过应用点云滤波算法,您可以去除这些噪点和无用信息,提取出您所需的几何形状。
常用的点云滤波算法包括体素滤波、半径滤波和法线滤波等。
2. 点云配准:点云配准是将多个点云数据对齐到同一个坐标系中的过程。
通过点云配准,您可以将不同位置或角度下获取的点云数据融合成一个完整的模型。
常用的点云配准方法包括ICP算法和特征匹配算法等。
3. 点云分割:点云分割是将点云数据分割成多个具有独立几何结构的子集的过程。
通过点云分割,您可以提取出不同组成部分的几何信息,例如建筑物的墙面、地面和屋顶等。
常用的点云分割算法包括基于法线的分割和基于聚类的分割等。
以上是一些常见的点云处理方法,您可以根据实际需求选择适合的方法进行处理。
在进行点云处理之前,建议您先对点云数据进行可视化,以便更好地理解和分析。
最后,我们需要将处理后的点云数据导出或保存。
根据CAD软件的不同,您可以选择将点云导出为点云数据格式或转换为CAD中的几何对象。
导出点云数据时,建议您选择合适的数据格式和参数,以便在其他软件中使用或进一步处理。
在CAD中处理点云数据可能需要一定的专业知识和技巧。
如果您刚刚接触点云处理,建议您阅读相关的教程或参考书籍,以便更好地理解和应用。
点云语义分割中准确度指标计算
点云语义分割中准确度指标计算点云语义分割是指根据点云数据中每个点的位置和属性,将点云分割成不同的类别,比如地面、建筑物、树木等。
准确度指标是评估模型在预测中的准确性和精确度的一种度量。
在点云语义分割中,常用的准确度指标包括以下几种:1. IoU(Intersection over Union),IoU是指预测的分割结果与真实分割之间的交集与并集的比值。
计算公式为IoU = TP / (TP + FP + FN),其中TP表示真正例(模型正确预测为正例的样本数),FP表示假正例(模型错误预测为正例的样本数),FN表示假负例(模型错误预测为负例的样本数)。
IoU的取值范围在0到1之间,值越大表示模型预测的结果与真实结果重合度越高。
2. mIoU(mean Intersection over Union),mIoU是指对所有类别的IoU取平均值,用来衡量整体的分割准确度。
计算公式为mIoU = Σ(IoU_i) / n,其中IoU_i表示第i类的IoU,n表示类别的总数。
3. Pixel Accuracy,Pixel Accuracy是指模型预测正确的像素数占总像素数的比例。
计算公式为Pixel Accuracy = (TP + TN)/ (TP + TN + FP + FN),其中TN表示真负例(模型正确预测为负例的样本数)。
4. Precision和Recall,Precision是指模型预测为正例的样本中实际为正例的比例,计算公式为Precision = TP / (TP + FP);Recall是指实际为正例的样本中被模型预测为正例的比例,计算公式为Recall = TP / (TP + FN)。
在计算这些准确度指标时,需要将模型预测的结果与真实的标签进行比较,以评估模型的性能。
这些指标可以帮助我们全面了解模型在点云语义分割任务中的表现,从而进行模型的优化和改进。
matlab点云分割算法

matlab点云分割算法随着三维数据的广泛应用,点云分割成为了一个重要的研究领域。
点云分割是指将三维空间中的点云数据划分为一组具有相关性的子集,以便更好地理解和处理三维数据。
在本文中,我们将介绍一种基于MATLAB的强大的点云分割算法。
1. 点云数据的预处理点云数据通常以xyz坐标表示,其中每个点的(x, y, z)值描述了其在三维空间中的位置。
在进行点云分割之前,我们需要对数据进行预处理。
1.1 数据读取在MATLAB中,我们可以使用`pcread`函数来加载点云数据。
例如,我们可以使用以下代码读取名为`point_cloud.ply`的点云文件:```matlabptCloud = pcread('point_cloud.ply');```1.2 数据去噪由于点云数据常常包含噪声,我们需要对数据进行去噪处理。
MATLAB提供了多种滤波算法,如统计滤波、高斯滤波等。
下面是一个示例,展示如何使用统计滤波对点云数据进行去噪:```matlabfilteredCloud = pcdenoise(ptCloud);```2. 点云分割算法本文介绍的点云分割算法基于基于聚类的方法,常用的算法有基于区域生长的分割算法和基于K-means的聚类算法。
2.1 基于区域生长的分割算法区域生长算法基于相似度和连通性原则,将相似的点组合在一起形成一个区域。
MATLAB中可以使用`pcsegdist`函数进行区域生长分割。
下面是一个示例:```matlabsegCloud = pcsegdist(filteredCloud, threshold);```其中`threshold`是设定的相似度阈值。
2.2 基于K-means的聚类算法K-means算法将点云数据聚类到不同的簇中,每个簇内的点具有相似的特征。
在MATLAB中,我们可以使用`kmeans`函数实现聚类分割。
以下是一个示例:```matlabpointData = ptCloud.Location;numClusters = 3;[idx, C] = kmeans(pointData, numClusters);```其中`numClusters`是设定的簇数。
contextcapture生成点云分幅
contextcapture生成点云分幅
ContextCapture可以生成点云模型,然后可以使用点云分割(point cloud segmentation)的方法将点云划分为多个分幅。
点云分割是将点云数据划分为不同的部分或区域的过程。
这可以通过一些算法和技术完成,例如基于点云的颜色、密度、形状等特征进行划分。
使用ContextCapture生成点云模型后,可以使用点云分割算法对点云进行分割。
这可以通过一些开源的点云处理库(例如PCL)来实现。
具体的步骤可以包括以下几个步骤:
1. 导入点云数据:将ContextCapture生成的点云数据导入到点云处理库中。
2. 进行点云分割:使用点云分割算法对点云进行分割。
可以选择适合特定场景的算法,例如基于法线的分割、基于聚类的分割等。
3. 生成分幅:根据分割结果,将点云分成多个分幅。
每个分幅可以表示一个物体、区域或特定的场景。
4. 可视化分幅:可以使用点云可视化工具来可视化分幅的结果,例如将每个分幅显示为不同的颜色或形状。
需要注意的是,点云分幅的结果可能会受到点云质量和分割算法的影响。
在使用ContextCapture生成点云模型时,可以选择合适的参数和设置,以获得更好的点云分割效果。
基于三维激光点云的地面提取
基于三维激光点云的地面提取
巫春涛;郑加富
【期刊名称】《测绘与空间地理信息》
【年(卷),期】2024(47)5
【摘要】实现汽车无人驾驶技术的关键在于精准地提取地面信息,现阶段主要采用启发式算法和点云分割手段来实现地面提取。
为提升地面识别精度以及评估各类机器学习算法运用效率,本文使用了KNN、决策树以及支持向量机3种常见的机器学习分类方法对三维激光点云数据中的地面和非地面点进行识别分类。
实验采用包含多重地物特征标记的城市场景3D点云数据集VMR-Oakland-v2进行模型训练,并使用训练后的模型对实采三维点云数据进行分类验证,结果表明,KNN和决策树模型取得了较好的提取效果,从模型大小和训练时间上来看决策树模型占用空间较大,效率较低也取得了较好的分类精度。
【总页数】4页(P180-182)
【作者】巫春涛;郑加富
【作者单位】浙江省钱塘江管理局勘测设计院
【正文语种】中文
【中图分类】P25;TB22
【相关文献】
1.基于EPS 2008及地面三维激光扫描点云数据进行断面线提取
2.机载三维激光成像系统点云数据滤波与地面点提取算法研究
3.无人机影像点云与地面激光点云配
准的三维建模方法4.无人机影像点云与地面激光点云配准的三维建模方法5.地面三维激光扫描建筑物点云特征线提取
因版权原因,仅展示原文概要,查看原文内容请购买。
点云提取高程点 -回复

点云提取高程点-回复点云提取高程点是数字地形模型(DTM)生成中重要的一步。
在地理信息系统(GIS)和遥感领域中,点云是由激光雷达或者其他遥感技术获取的大量三维点构成的数据集合。
这些点分布在地物表面上,可以用于地形分析、可视化和地图制作等应用。
而点云中的高程点提取则是将点云数据中的地面点提取出来,用于生成具有地物表面高程特征的数字地形模型。
点云提取高程点的过程可以分为以下几个步骤:1.预处理:首先要对点云数据进行预处理,包括去除错误点、噪声点和无用点。
这可以通过点云滤波算法来实现,常用的滤波算法有体素滤波(Voxel Filter)和统计滤波(Statistical Outlier Filter)等。
通过预处理,可以提高后续步骤的效果,减少不必要的计算和干扰。
2.地面点识别:地面点是点云中高程点的一种,通常位于地物表面并具有较低的高程。
为了提取地面点,可以使用一些地面点识别算法,例如基于统计的方法。
这些方法通过计算邻域点的统计特征,如点密度和高程差异等,来判断点是否为地面点。
常用的统计方法有均值滤波(Mean Filter)和中值滤波(Median Filter)等。
通过识别地面点,可以清除非地面点干扰,提取出纯净的地面高程点。
3.点云分割:在地面点提取后,可以对点云进行分割操作,将点云划分为不同的物体或地形特征区域。
点云分割算法可以根据点的邻域关系、颜色、形状等特征进行分割,以便更好地提取特定区域的高程点。
常用的点云分割算法有基于聚类的方法和连通域分析方法等。
4.高程点提取:根据应用需求,可以从点云数据中提取特定的高程点。
例如,在城市规划和建筑物识别中,可以提取建筑物的高程点;在水文分析和洪水模拟中,可以提取河道和湖泊等水体的高程点。
高程点提取可以通过设置阈值、条件判断和模型拟合等方法来实现。
5.数据融合和分析:在高程点提取后,可以对提取得到的点云数据进行融合和分析。
数据融合可以将不同来源和类型的点云数据融合为一个完整的地形模型,如将激光雷达点云和航空影像点云融合。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
点云地面分割代码
点云地面分割是一个相对复杂的问题。
以下是Python代码实现的一种解法:
```
import open3d as o3d
import numpy as np
import time
# 读入点云数据
pcd = o3d.io.read_point_cloud("point_cloud.pcd")
# 创建平面模型
plane_model, inliers =
pcd.segment_plane(distance_threshold=0.01,
ransac_n=3,
num_iterations=1000) # 对初始点云数据进行地面分割
ground_points = np.asarray(pcd.points)[inliers]
non_ground_points =
np.asarray(pcd.points)[np.logical_not(inliers)]
# 可视化分割结果
pcd_ground = o3d.geometry.PointCloud()
pcd_ground.points = o3d.utility.Vector3dVector(ground_points) pcd_non_ground = o3d.geometry.PointCloud()
pcd_non_ground.points =
o3d.utility.Vector3dVector(non_ground_points)
pcd_ground.paint_uniform_color([1, 0, 0])
pcd_non_ground.paint_uniform_color([0, 1, 0])
o3d.visualization.draw_geometries([pcd_ground,
pcd_non_ground])
```
该代码使用了Open3D库中的建模方法,其中`segment_plane`方法用于从点云中分割出平面模型。
通过平面模型,我们可以将点云数据中的地面和非地面点进行分割。
在上述代码中,`distance_threshold`参数控制了平面模型的精度,`ransac_n`参数为每次随机采样的点的数量,`num_iterations`参数为RANSAC算法的迭代次数。
值得注意的是,该代码实现的方式并不是最优的,对于更大的点云数据,很难直接应用在实际场景中。
如果要使用在真实应用中,需要考虑到算法的速度和准确性。