(整理)固定翼花式飞行3D吊机技术讲解.
固定翼飞行原理,硬件介绍以及制作指导介绍(写写帮整理)
固定翼飞行原理,硬件介绍以及制作指导介绍(写写帮整理)第一篇:固定翼飞行原理,硬件介绍以及制作指导介绍(写写帮整理)固定翼篇目录:一.飞行原理二.硬件介绍三.制作指导一.飞行原理1.飞机飞行时受到的作用力飞机在飞行时会受到4个基本的作用力:升力(lift)、重力(weight)、推力(thrust)与阻力(drag)。
1.1升力机翼的运动在穿越空气时,会产生一股向上作用的力量,这就是升力。
机翼的前进运动,会让上下翼面所承受的压力产生轻微的差异,这个上下差异,就是升力的来源。
由于升力的存在,飞机才能够维持在空中飞行。
产生升力的主要原因:(有翼型固定翼)伯努利定律是空气动力最重要的公式,简单的说流体的速度越大,静压力越小,速度越小,静压力越大,这里说的流体一般是指空气或水,在这里当然是指空气,设法使机翼上部空气流速较快,静压力则较小,机翼下部空气流速较慢,静压力较大,两边互相较力,于是机翼就被往上推去,然后飞机就飞起来,以前的理论认为两个相邻的空气质点同时由机翼的前端往后走,一个流经机翼的上缘,另一个流经机翼的下缘,两个质点应在机翼的后端相会合,经过仔细的计算后发觉如依上述理论,上缘的流速不够大,机翼应该无法产生那么大的升力,现在经风洞实验已证实,两个相邻空气的质点流经机翼上缘的质点会比流经机翼的下缘质点先到达后缘。
(平板固定翼)攻角(迎角): 当飞机的机翼为对称形状,气流沿着机翼对称轴流动时,由于机翼两个表面的形状一样,因而气流速度一样,所产生的压力也一样,此时机翼不产生升力。
但是当对称机翼以一定的倾斜角(称为攻角或迎角)在空气中运动时,就会出现与非对称机翼类似的流动现象,使得上下表面的压力不一致,从而也会产生升力。
1.2重力重力是向下的作用力。
由于飞行员可以决定飞机的载重大小,所以某种程度上,你可以说这是人为可以控制的力量。
除了燃料随着旅程慢慢消耗之外,飞机的实际重量在航程中不大容易变动。
在等速飞行中(飞机的速度与方向保持一定不变),升力与重力维持着某种平衡。
直升机航线和3D飞行教程

直升机训练进阶图学习直升机飞行之前看看这张图吧,很直观也很详细。
直升机航线飞行直升机的动作目前有两种流行趋势,一种为惊险刺激的3D飞行,其飞行中绝大部分进行令人眼花缭乱的真直升机完全做不到的倒、退飞中夹杂横滚、斤斗、死亡螺旋等动作,使直升机始终在临界负荷状态下飞行,精神高度紧张,稍有疏忽,摔机后损失惨重,所以适合3D飞行的飞机都力求简单、易维修、便宜。
另外一种是多年延续下来的3C飞行,它受正规严谨的训练,力求动作准确优雅,充分展示直升机不同于其它形式飞机的飞行特点,对飞机器材等要求较高,有国际航联规定的多套动作可作训练、比赛。
其缺点为练习时需多人互相促进,动作练习时未免枯燥乏味。
它的比赛动作分为静动作和高空动作,高空动作又以上空飞行的航线练习为基础之基础,下面就为大家讲一下航线的练习方法。
上空飞行之前要有扎实的左右侧悬停基础,可先进行侧悬停平视高度左右平移并逐渐加快平移速度的练习,这种练习主要是练习控制飞机速度的能力,此种练习要达到既可将飞机加速飞行,也可以以准确的杆量将快速飞行的飞机机速控制住,还能减速将飞机停下来。
初次上空飞行可采取图一的形式,(顺便讲明,直升机在慢速前进时,因直升机机体本身与风相对运动也产生一些升力,所以直升机只比悬停时稍加一点油门,就可以升空慢速跑航线了)逐渐加大距离。
返回的路线为原路退回。
在逐渐熟悉飞机在高空姿态观察以后可以按图二的航线飞行。
在爬升转弯以后可以稍加速。
图三解释的是顺时针单旋翼直升机在加速飞行时,因旋翼每旋转一周分顶风、顺风面,会产生一个升力差,速度越大越明显会机体往右倾斜,需压左副翼修正,同样,机体本身有自律安定性,克服反扭力矩的右尾桨舵也显偏大,机头要修左来纠正(现在多数的陀螺带锁头功能,也就很不明显了)。
图一图二图三好了,现在我们可以上天了。
图四所画的是直升机标准的转弯航线。
开始的时候逐渐压右副翼、右尾桨稍微拉一点升降舵使飞机刚刚能转过弯即可,图中列举了两种过度打尾桨和尾桨舵量不够的情况,需要注意的是开始的时候以慢机速前进,转弯时副翼、尾桨舵量要小,使飞机以缓坡度大半径转弯。
3D 固定翼飞控说明书

3D固定翼飞控说明书V1.0本飞控适用于3D固定翼(F3P)及四通道教练机、像真机等固定翼机型。
支持一键吊机、自动平衡、陀螺仪增稳、半自稳、手动5种飞行模式。
支持S.BUS或PPM信号的接收机,适用大多数航模遥控器。
飞控搭载3轴陀螺仪、3轴加速度传感器,使用自主研发的全姿态算法、控制算法、数字滤波算法,让飞行更简单。
二、参数输入电压:DC 5V (最大6V ) 插针:2.54mm * 3 pin * 5飞控(含插针)重量2.5克,长35mm ,宽14.65mm一通道:副翼舵机二通道:升降舵机三通道:油门信号 (电调BEC 供电)四通道:方向舵机接收机:SBUS 或PPM按键:调舵机相位 状态指示灯 舵机相位指示灯机头方向指示请确保箭头指向机头方向,飞控正面朝上或者朝下皆可,用3M 胶将飞控平贴在机身上,建议安装在重心附近。
将舵机线和电调线接在飞控对应的插针上。
四、飞行模式设置飞行模式通过遥控器CH5(三段开关)和CH7(两段开关)两个独立通道进行设置。
模式共5种:平衡、吊机、增稳、半自稳、手动。
平衡 开关位置:上副翼升降舵方向舵CH5CH7CH7手动增稳 半自稳吊机 开关位置:上开关位置:中开关位置:下开关位置:下开关位置:上开关位置:下CH5通道值:0~700CH5通道值:701~1300CH5通道值:1301~2048CH7通道值:0~1300 CH7通道值:1301~2048 CH7通道值:0~1300 CH7通道值:1301~2048五、遥控器相位设置(必要设置)请确保遥控器上的通道相位按如下设置:三通道:油门-- 反相其余通道:正相遥控器相位关系到姿态校准,而舵机相位需要通过飞控进行调整。
六、上电校准每次飞控上电之后,会进行陀螺仪校准(绿灯闪烁),此时请保持飞机处于静止状态(无需水平),直到绿灯常亮。
七、姿态校准飞控需要进行姿态校准,或称水平校准,确定飞机的平衡姿态。
校准时,建议以一个机头稍稍上仰的角度进行校准,这样有利于平衡时保持高度。
固定翼飞机控制基本方法
固定翼飞机控制基本方法(总1页)-CAL-FENGHAI.-(YICAI)-Company One1-CAL-本页仅作为文档封面,使用请直接删除固定翼飞机控制基本方法飞机控制的几个关键要素无非是方向舵、升降舵、副翼、油门这四个通道,其他都是锦上添花,把这四个通道的控制掌握了,基本的飞行就没有问题,至少,在模拟器上是这样,等飞完真机再验证下。
方向舵在地面滑行时,方向舵用来控制飞机转向,但在空中飞行时,方向舵是用来使机身与飞行方向保持一致。
升降舵当机翼保持水平时,拉升降舵实现飞机抬头,注意目的是使飞机抬头而不是爬升,爬升主要依靠油门的控制,升降舵只是起辅助作用。
副?翼副翼用来控制机翼向左或向右倾斜或保持水平,副翼与升降舵配合实现飞机的空中转弯。
空中转弯?1利用副翼将机翼向要转的方向倾斜,达到需要的斜度后迅速将发射器副翼拉杆回中2立即拉升降舵,幅度为保持飞机在转弯过程中不掉头3完成转弯后回中升降舵,反向打副翼以实机翼恢复水平。
操作的关键:转弯半径取决于副翼操作幅度的大小,而不是压副翼时间的长短,正确的操作方法是短暂压一下副翼使机翼达到期望的倾斜度,然后让副翼操作杆回中,否则机翼倾斜度会越来越大,即便拉升降舵,飞机也会急剧的螺旋俯冲,这是我在模拟器上摔机无数的根本错误操作之三。
拉升降舵的幅度取决于机翼的倾斜度,倾斜度越大,拉升降舵的幅度越大,升降舵拉升幅度在转弯过程中尽量保持不变,保持飞机的稳定,这就要求操作杆移动幅度要正确,这个只有在模拟器上多多练习体会。
飞行高度一般来讲,油门在1/4~1/2之间的某个位置时,飞机会达到平衡状态并保持稳定飞行,如果需要爬升到新的高度时,慢慢拉油门,飞行速度增加从而导致机翼产生的升力增加,当达到要求的高度时,再将油门拉回原来的位置。
3。
航空模型入门知识

木制飞机制作的最后一道工序是贴蒙皮。 现多用热缩膜做蒙皮。 优秀的热缩蒙皮加热后能牢牢地粘在轻木上,收缩
率较高且重量轻。
德国蒙皮
2.1.1 发动机
目前航模用的发动机有二行程/四行程电热式发动机 目前航模用的发动机有二行程/
(以甲醇为燃料)、单缸/ (以甲醇为燃料)、单缸/多缸汽油发动机和涡轮喷气 发动机。 电热式发动机按级数来分,不同级数的发动机对应不同 的气缸容量,如21级发动机对就3.5cc工作容积,47级 的气缸容量,如21级发动机对就3.5cc工作容积,47级 对应7.7cc工作容积。 对应7.7cc工作容积。 汽油发动机则直接按气缸容积来分,一般说**cc汽油机。 汽油发动机则直接按气缸容积来分,一般说**cc汽油机。 不同大小的发动机必须配相应的桨。桨的规格一般用 “直径*螺距”,如47级发动机一般配11*6的桨,11是 直径*螺距”,如47级发动机一般配11*6的桨,11是 桨的直径,6 桨的直径,6是螺距。
2.F3A特技机 2.F3A特技机 3.3D机 3.3D机 4.像真机 4.像真机 5.滑翔机 5.滑翔机
3.遥控设备 3.遥控设备
3.飞机的制作:1.主要制作材料 3.飞机的制作 1.主要制作材料
2.粘合剂 2.粘合剂 3.蒙皮 3.蒙皮
制作:戚培杰
1.2.2 F3A特技机 F3A特技机
能完成一系列的标准 特技飞行动作。特点 是外形流畅,飞行速 度很快。
阿波罗50级F3A特 技机
全球SPOT*ON 50
PEAK50
1.2.3 3D特技机 3D特技机
3D机能完成吊机等花式特技动作,与F3A不同的是,花式特 3D机能完成吊机等花式特技动作,与F3A不同的是,花式特 技一般是在较低的速度下完成的。从外观上看,3D机一般有 技一般是在较低的速度下完成的。从外观上看,3D机一般有 较大的舵面,飞机的减轻做到了极致。
固定翼专用3轴陀螺仪使用说明
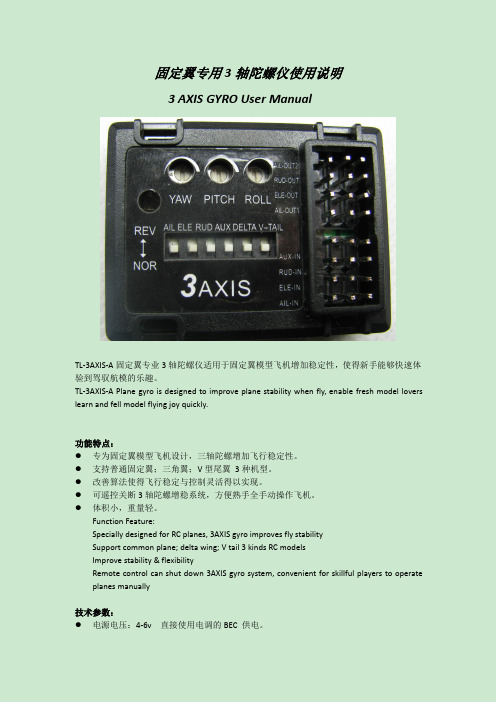
固定翼专用3轴陀螺仪使用说明3AXIS GYRO User ManualTL-3AXIS-A固定翼专业3轴陀螺仪适用于固定翼模型飞机增加稳定性,使得新手能够快速体验到驾驭航模的乐趣。
TL-3AXIS-A Plane gyro is designed to improve plane stability when fly,enable fresh model lovers learn and fell model flying joy quickly.功能特点:●专为固定翼模型飞机设计,三轴陀螺增加飞行稳定性。
●支持普通固定翼;三角翼;V型尾翼3种机型。
●改善算法使得飞行稳定与控制灵活得以实现。
●可遥控关断3轴陀螺增稳系统,方便熟手全手动操作飞机。
●体积小,重量轻。
Function Feature:Specially designed for RC planes,3AXIS gyro improves fly stabilitySupport common plane;delta wing;V tail3kinds RC modelsImprove stability&flexibilityRemote control can shut down3AXIS gyro system,convenient for skillful players to operate planes manually技术参数:●电源电压:4-6v直接使用电调的BEC供电。
●输出信号:普通模拟舵机信号输出。
●外形尺寸:●重量:Technical Parameters:Power voltage:4-6V BEC of ESC supply the power directly.Size:Weight:注意事项:Attention Items:●安装3轴陀螺仪之前需要先确认您的飞机已经正确安装。
Assemble your planes completely before assemble the3AXIS gyro.●关闭遥控器上的V尾混控功能及三角翼混控功能。
固定翼的飞行教程及原理入门必看

固定翼的飞行教程及原理入门必看本帖最后由贾恬夏于2009-8-9 10:50 编辑飞行前要注意哪些飞行前要注意1、尽可能清理飞行场地。
2、充分注意周边环境:- 请勿在强风、雨天或夜晚飞行- 请勿在通风不畅或建筑物内飞行- 请勿在人多的地方飞行- 请勿在学校、住宅或医院近旁飞行- 请勿在公路铁道或电线近旁飞行- 请勿在有可能因其他航模飞机引起的无线电波频率干扰的地方飞行3 儿童遥控飞机一定要有成人在旁看护.4、模型飞机不能用于超出使用范围的其它用途。
5、随时放置好螺丝刀,扳手及其它工具。
在启动前,检视用于组装或维修飞机机的工具是否已经准备好。
6、检查飞机的每个部分。
启动前,检查确保飞机无零件损坏并且工作正常。
检视以确保所有活动零件位置正确,所有螺丝及螺母已适当拧紧,并且没有损坏和装配不当的地方。
检查确保电池已充满电。
根据操作手册的说明更换损坏和不能再用的零件。
如果操作手册没有说明,请与经销商或与我们客户服务部联系。
7、备件请用正品。
不要使用非原厂配置的零配件,否则可能有引发事故或伤害的危险。
8、启动电机前检查各舵机是否工作正常。
启动前的检查1、初学者有必要从有经验者那儿了解安全事项和操作说明。
2、检查确定没有松动或掉落的螺丝和螺母。
3、检查确定电动机座上螺丝没有松动。
4、检查确定桨叶没有损坏或磨损。
5。
检查确定发射机、接收机、电池已充满电。
6、检查遥控器的有效控制距离。
7、检查确定所有的舵机动作滑顺。
舵机动作有误和故障会导致失控,8、在飞行中如有异常抖动,请立即降落查找原因。
19、不计后果地飞行会导致事故和伤害,请遵循所有规则,安全负责的享受飞行乐趣。
-------------------------------------------------------------------------------------------------------------------------------------------------------航模飞机飞行原理飞机从地面滑跑到离地升空,是由于升力不断增大,直到大于飞机重力的结果。
固定翼飞行教学

一般在起飞的动作时,基本止都是逆风进行。如果读者的飞行场所非常的宽广的话,观察当时风的情况,在逆风的状态之下,从可以取得足够的滑行距离的位置,开始进行起飞是比利时较是比较标准的。而如果受限于飞行场所的旖 ,虽然多少有点横向风,如果不强的话就没关系,但是风势很强的情况下难度就会相对的提高,因此还是交给指导者来判断吧。
因此,机体的选择对于一个初学者而言,也是很重要的。 另外,虽然说是练习机,但是副翼的舵角调整还是照说明书调好,如此一来初学者就可以得到最良好的反应了。而在以下的内文中,我们都是以拥有副翼的练习机为前提来作说明的。
确认操纵杆与舵面的反应
首先,我们在地面上动一动看摇控器左边的摇杆。当我们上下移动时,水平尾翼的升降舵应该也会上下摆动才对。但是,摇杆往下动的时候,升降舵会往上动;摇杆往上动的时候,升降舵则会往下动。升降舵和摇杆动作的方向正好是相反的。遥控器左边的遥杆往下拉时稍为打上舵 ;摇杆往上拉时稍为打下舵 。第一次碰飞行用遥控器的人往往会把打上舵和打下舵的意思搞反了。不要太过自信自己都懂了, 自己人在从头好好的想一遍看看。
但是,对于初学者而言要学习空中盘旋并不需要方向舵。也就是说,方向舵即使是固定式的,飞机还是可以盘旋的。甚至有些指导者为了避免操纵杆的操纵错误而造成机身乱动,因而建意初学者在使用4动作的飞机时,将方向舵固定住。我们在后面会详细说明,飞机是靠副翼来左右摆动,并由打上舵、来维持盘旋的高度。它并不像车子和船只用方向舵来改变方向。
在学习空中转弯之前,我们先来复习一下遥控器的操作和舵的动作。基本上,初学者在空中盘旋时所使用的舵有两种。一种是升降舵(elevator),一种是副翼(aileron)。
可能有人会问我:怎么不用方向舵(rudder)来转弯呢?的确,4动作的飞机是由方向舵在控制机体的左右摆动,有些初学者用的飞机没有副翼。所以有人会觉得奇怪。
最新固定翼花式飞行3D吊机技术讲解

固定翼花式飞行3D 吊机技术讲解固定翼3D吊机技术讲解摘自:广州模型网 KEION近期看到很多朋友想玩3D花色飞行,但又很少见到这方面的介绍文章,我决定将自己一年多探索到的一些心得、感觉、技法整理,供大伙参考。
希望更多的人加入3D飞行游戏。
3D飞行的特点:飞机飞行时,舵面受力有两方面:飞行气流+浆气流。
正常飞行时,主要靠飞行气流,浆气流的影响可以忽略。
3D飞行则两种气流都用上,失速动作将以浆气流为主,3D机的舵面巨大,就是因为这个。
低速或失速,使气流对飞机的“握持力”降低,一些平时被忽略的因素全部呈现出来:惯量的因素(俯仰、滚转、摆动和前进),陀螺效应等。
而这些因素的响应时间和动力有关。
市面售卖3D(练习)机都很轻盈,翼载荷低,约30-40g/qdm,这些附加因素不明显。
如果80g/qdm以上的象真花式机,这些因素就必须面对了。
吊机吊机有两种,一种是“扭力转”飞机垂直地面,飞机转动(和浆相反方向);另一种是迎风"仰停",有人起了春宫动作般的美名:“抬头望月”。
两种都是静态飞行,但有本质的区别:扭力转:飞机相当空气是0速(全失速),“飞行气流”对飞机的“握持力”最低,飞机在浆的反扭力下滚转,舵面只受浆气流的影响。
仰停:飞机与地面有较大的仰角(不是垂直),飞机相对空气速度是风速,视觉上相对地面速度为0。
“飞行气流”(风速)仍然对飞机有“握持力”,3D练习机而言,通常足以化解浆的反扭力的影响(或小许副翼),飞机不会旋转;舵面受到飞行气流和浆气流的共同作用;飞行气流对主翼有一定的乘托,所以对动力要求较低,也省油。
仰停实质上是大仰角迎风失速飞行,是非常好玩的花色,但不认为是真正意义上的悬停,尽管视觉相似。
以下所指的吊机是“扭力转”。
训练特点:深圳是模型飞机和发动机的主要产地,便利条件下玩吊机稍早(约1年半前)。
至今,见过极高天分,用我的飞机,第3箱油就能离地1米吊机、也见过在我后面不久玩“仰停”,都一年多了,到现在还听说不会“扭力转”的。
四旋翼无人机技术原理解读(通讯方式)
四旋翼无人机技术原理解读(通讯方式)四旋翼无人机技术原理解读(通讯方式)目前发现国内正儿八经机器人、无人机并且还能活跃地上网关注行业前沿动向、热爱写科普文章的研究人员原来越少。
因此所有的研究回答里都没有人真正说明白无人机到底是什么,而理解无人机到底是什么才是回答这个问题的先决条件。
什么是无人机首先,无人机就是不载人的飞行器,而说到飞行器,通常我们又可以把飞行器分为三类。
1、固定翼(fixed wing)。
平时坐的波音747空客A380,还有F-16歼-15之类的都是固定翼飞机。
顾名思义就是翅膀形状固定,靠流过机翼的风提供升力。
动力系统包括桨和助推发动机。
固定翼根据机翼尺寸的不同还有很多小的分类,在此不细说。
固定翼飞行器的优点是在三类飞行器里续航时间最长、飞行效率最高、载荷最大,缺点是起飞的时候必须要助跑,降落的时候必须要滑行。
2、直升机(helicopter)。
特点是靠一个或者两个主旋翼提供升力。
如果只有一个主旋翼的话,还必须要有一个小的尾翼抵消主旋翼产生的自旋力。
为了能往前后左右飞,主旋翼有极其复杂的机械结构,通过控制旋翼桨面的变化来调整升力的方向。
动力系统包括发动机、整套复杂的桨调节系统、桨。
直升机的优点是可以垂直起降,续航时间比较中庸,载荷也比较中庸。
缺点是极其复杂的机械结构导致了比较高的维护成本。
3、多旋翼(multi-rotor)。
四个或者更多个旋翼的直升机,也能垂直起降,但是通常只有直升机叫直升机,多旋翼就叫多旋翼,而不叫多旋翼直升机。
四旋翼特别叫做quadrotor。
多旋翼机械结构非常简单,动力系统只需要电机直接连桨就行。
下图是直升机的动力系统结构,再下图是多旋翼的动力系统结构。
不懂机械的人也能看出多旋翼简单得多。
多旋翼的优点是机械简单,能垂直起降,缺点是续航时间最短,载荷也最小。
今天来给大家介绍下四旋翼无人机,看看怎么是真正的技术,吼吼吼......1.i2c通信方式;因为我不是学电类专业,最开始对i2c这些是没有一点概念,最后通过Google了解了一些。
航拍初学者必备,详解15种无人机航拍操控技术

航拍初学者必备,详解15种无人机航拍操控技术近几年来,随着无人机航拍在影视制作中的迅猛发展,这种便捷的航拍方式极大地突破了传统意义上人们对航拍需求的奢望,使得电视制作中航拍画面变得丰富多彩且日臻完美。
然而,由于无人机在影视航拍领域尚无较为系统的操作规程,给一些初学航拍者在摸索阶段带来不少困惑,甚至还造成了意外的损失。
为此,我根据自己在工作中的经历,谈些个人体会供大家参考。
1. 概述无人机大约出现于上个世纪的20 年代,最早是作为军队防空训练用的无人靶机被外界所知晓的。
它是一种靠无线电遥控设备控制或在自身内部安装控制程序操纵的无人驾驶飞行器。
随着时间的推移和制造技术的发展,无人机在翼型和材料的轻型化上都取得了巨大的进步,出现了能针对不同需求而承担不同任务的机型机种。
目前基本上将无人机分为:固定翼无人机、无人直升机和多轴旋翼无人机三大类。
除此之外还有其它一些特殊类别的无人机,如:伞翼无人机、扑翼无人机和无人飞船等等。
固定翼无人机是军用和部分民用无人机的主流平台,其主要特点是飞行速度较快,续航时间长,能完成包括低空照相、电子干扰、通信中继、靶机等一些有人飞机不宜执行的任务。
是无人机机种里最高技术水平的代表。
无人直升机由于原地垂直起飞和悬停都非常灵活,从而可以提供一些对速度、升限和航程等有着特殊要求的公共服务,如治安巡逻、森林防火、气象观测、生态农业等事宜。
而多轴旋翼无人机因使用锂电池作为动力,在起飞时常常需要借助一定的推力,其灵活性介于固定翼和直升机中间。
一般在一块较小的平整场地上,就可以顺利完成起飞和降落,对飞行操控要求简单。
因其在飞行过程中状态平稳,目前在民用消费级无人机中,已被首选为航拍摄影的最佳飞行器。
图1 多轴旋翼无人机的起飞2. 在影视摄影中的重要性自从电影诞生以来,各种视觉效果的拍摄手法日新月异。
尤其是电视技术的传播普及,使得各种摄影器材不断推陈出新。
从地面运动的轨道车,到空间升降的大型摇臂,无不体现着摄影人对空间视觉效果变化的追求。
3D遥控特技技术图解
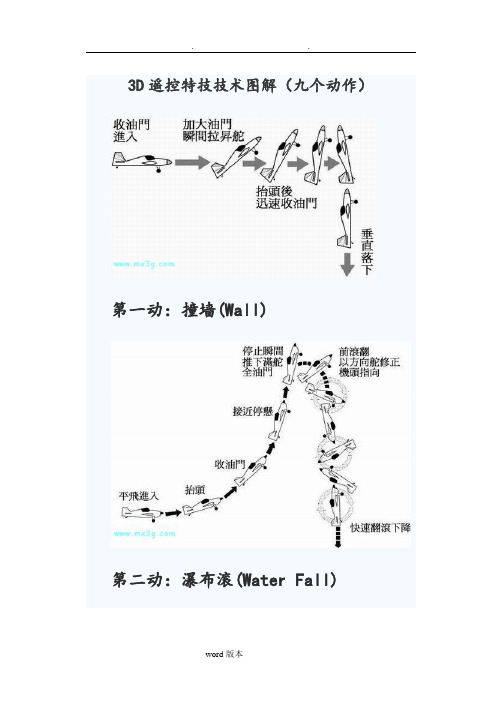
3D遥控特技技术图解(九个动作)第一动:撞墙(Wall)第二动:瀑布滚(Water Fall)第三动:扭力滚(Torque Roll)第四动:侧滚水平筋斗(Rolling Loop)第五动:降落伞(Parachute)第六动:隆许瓦克(Lomcevak)第七动:侧飞筋斗(Knife-wdge loop)第八动:猎鹰(Harrier)遥控飞机术语解析迎角(Angle of attack) 对于固定翼飞机,机翼的前进方向(相当与气流的方向)和翼弦(与机身轴线不同)的夹角叫迎角,也称为攻角,它是确定机翼在气流中姿态的基准。
对于直升机和旋翼机,迎角的表示方法与固定翼飞机略有不同,它是指与前进方向垂直的轴和旋翼的控制轴之间的夹角。
侧滑角(side slip angle)是指飞机的轴线与飞机的飞行速度方向在水平面内的夹角。
侧滑角是确定飞机飞行姿态的重要参数。
过载(overload)作用在飞机上的气动力和发动机推力的合力与飞机重力之比称为飞机的过载。
飞机所能承受过载的大小是衡量飞机机动性的重要参数。
过载越大,飞机的受力越大,为保证飞机的安全,飞机的过载不能过大。
飞行员在机动飞行中也会因为过载大于一或者小于一而承受超重和失重。
飞行员所能承受的最大过载一般不能超过8。
边条(Strake) 边条是指附加于机身或机翼机身结合处的小翼面,包括机身边条和机翼边条两种。
机身边条位于机身左右两侧,宽度相等;而机翼边条则是位于机翼机身结合处近似三角形的小翼面。
采用边条翼结构可以减少阻力,改善飞机的操作性。
上反角(Dihedral angle) 上反角是指机翼基准面和水平面的夹角,当机翼有扭转时,则是指扭转轴和水平面的夹角。
当上反角为负时,就变成了下反角(Cathedral angle)。
三角翼(Delta wing) 指平面形状呈三角形的机翼。
三角翼的特点是后掠角大,结构简单,展弦比小,适合于超音速飞行。
马赫数(Mach number) 常写作M数,它是高速流的一个相似参数。
固定翼特技动作辞典
筋斗类筋斗Loop就是所谓的翻筋斗。
一般性做做很容易,但圆圈要想画得很规范,则需要油门的工夫和升降舵上的微妙操作,需要相当的技术。
升降舵上拉称“内筋斗”(INSIDE LOOP),升降舵下拉称“外筋斗”(OUTSIDE LOOP)。
HESITATION LOOP(角形筋斗)多角形筋斗(正方筋斗)像描绘正方形那样的动作。
另外也有三角形、六角形筋斗。
做得准确规范还是相当难的。
古巴8字筋斗进行到后半圈时开始半滚转,在对面也同样翻筋斗,画8字。
因麦曼(翻转)IMMELMAN TURN 在筋斗的顶点做半圈滚转。
据说从前有个叫因麦曼的人因操纵不得力的飞机,为快速取得高度,从而产生了这个动作。
SPLIT S字SPLIT S与因麦曼翻转相反,半滚转之后向下方翻筋斗。
滚转筋斗Rolling_Loop边滚转边翻筋斗的动作。
通过错开滚转的转动和左操纵杆的转动,而一直保持机身向上的姿态,即可完成一周的筋斗。
动力和翼面积充分,轻量的飞机做起来会轻松。
两周滚转筋斗:做两圈滚转的同时翻筋斗的动作。
做得规范很不容易。
滚转类中文应该叫横滚。
为使滚转在同一轴心上,需要对升降舵、方向舵做微妙的调整操作。
慢滚Slow roll充分利用飞行场地,非常慢速滚转的动作。
方向舵和升降舵如果操作不细致,很难做到轴心不扭。
要想学习滚转类的操作基本功,建议从这个动作入手。
快滚Snap roll快速边拧边滚的动作。
锥形翼及容易翼尖失速的机型,内侧的机翼高速失速,快速翻转(SNAP)。
真机“比奇”只使用上拉升降舵和使用方向舵,即可做到快滚。
这是因为与RC相比,翼载荷非常大。
快滚有正滚(POSITIVE)和反滚(NEGATIVE)之分。
正滚是升降舵上拉,副翼和方向舵打向同一方向,而使其转动。
反滚是升降舵下推,副翼和方向舵打向不同方向,而使其转动。
2位横滚 2 point roll滚转中,每隔180度,加入静止动作。
但没怎么见人做过这个动作。
除了正面切换到反面之外,侧飞时的左右切换也应该是2位横滚。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
固定翼3D吊机技术讲解摘自:广州模型网KEION近期看到很多朋友想玩3D花色飞行,但又很少见到这方面的介绍文章,我决定将自己一年多探索到的一些心得、感觉、技法整理,供大伙参考。
希望更多的人加入3D飞行游戏。
3D飞行的特点:飞机飞行时,舵面受力有两方面:飞行气流+浆气流。
正常飞行时,主要靠飞行气流,浆气流的影响可以忽略。
3D飞行则两种气流都用上,失速动作将以浆气流为主,3D机的舵面巨大,就是因为这个。
低速或失速,使气流对飞机的“握持力”降低,一些平时被忽略的因素全部呈现出来:惯量的因素(俯仰、滚转、摆动和前进),陀螺效应等。
而这些因素的响应时间和动力有关。
市面售卖3D(练习)机都很轻盈,翼载荷低,约30-40g/qdm,这些附加因素不明显。
如果80g/qdm以上的象真花式机,这些因素就必须面对了。
吊机吊机有两种,一种是“扭力转”飞机垂直地面,飞机转动(和浆相反方向);另一种是迎风"仰停",有人起了春宫动作般的美名:“抬头望月”。
两种都是静态飞行,但有本质的区别:扭力转:飞机相当空气是0速(全失速),“飞行气流”对飞机的“握持力”最低,飞机在浆的反扭力下滚转,舵面只受浆气流的影响。
仰停:飞机与地面有较大的仰角(不是垂直),飞机相对空气速度是风速,视觉上相对地面速度为0。
“飞行气流”(风速)仍然对飞机有“握持力”,3D练习机而言,通常足以化解浆的反扭力的影响(或小许副翼),飞机不会旋转;舵面受到飞行气流和浆气流的共同作用;飞行气流对主翼有一定的乘托,所以对动力要求较低,也省油。
仰停实质上是大仰角迎风失速飞行,是非常好玩的花色,但不认为是真正意义上的悬停,尽管视觉相似。
以下所指的吊机是“扭力转”。
训练特点:深圳是模型飞机和发动机的主要产地,便利条件下玩吊机稍早(约1年半前)。
至今,见过极高天分,用我的飞机,第3箱油就能离地1米吊机、也见过在我后面不久玩“仰停”,都一年多了,到现在还听说不会“扭力转”的。
天份是一方面,方法也很重要。
吊机训练和其他飞行训练一样,要快速反应,必须在大脑形成条件反射区。
仰停,在大脑形成的反射区是两维、平面的;而扭力转则是多维、立体的。
如果一开始就练单面仰停,不管技巧多纯熟,再玩扭力转将会比没玩过的人困难得多。
估计重新建立多维反射区,会受到已有的反射区干扰、影响。
何况在已有反射区干扰下也很难建立。
一张白纸,要怎麽写、画都可以,弄脏了再来,可不容易。
就是说,不存在仰停-扭力转分步进、先后的问题。
如果开始练扭力转,多方位仰停自然就是囊中物。
因为看到多位同好无意中滑入这习惯旋涡,或受网上照片误导。
望借此贴,能提醒一二。
吊机比仰停难,但如果你不是急于接受行外人士的掌声和欢呼,就请直接练吊机。
方法得当,也不难。
它还可以作为练习其他3D花式飞行时的逃生、改出安全平台。
心理准备吊机和其他3D飞行一样,属失速类飞行。
我们经验中,失速意味着危险,摔机.令人紧张,判断和控制容易出现问题.另外,吊机难度最近被过分渲染,对有意尝试者造成心理压力。
说穿了,只不过比练习机降落稍难。
这是一种全新飞行方式,除了逃生外,要暂时放下以往的飞行习惯。
新方式有不习惯时,也不需要惊慌,尽量去感受。
因为这些是完全可以控制、安全的。
同时也是必须要面对经历,可以很快能适应的。
老夫眼朦、耳背、手震、还带少量痴呆,几个起落间基本掌握扭力转,何况年轻帅哥们。
必须指出,以前看吊机影象时,总觉得飞机是经过精确调整,自身就已经达静态平衡。
修舵是为抵消环境因素影响(干扰气流)。
试过后,觉得这想法不完整。
吊机时飞机在不断摆动中是处求动态平衡,少量偏差是完全可以修正。
商品3D练习机,出厂时已经考虑到这些因素,一般无须特别调整,按组合说明书设定就可以了。
舵面使用:练吊机不能用副翼制止飞机旋转,只使用升降舵和方向舵,副翼只在逃生时使用,原因是:3D练习机的副翼基本从翼尖到达机身,浆气流只对是靠近机身的一小段副翼,有少量作用。
如果是G202,CAP232等象真机,副翼离机身远,只在翼尖部分,浆气流对副翼将几乎毫无作用,练出来的手法将使不上。
除非把飞机上下流窜,借气流才有副翼的作用(这我还真见过)。
因为这样的考虑,我当初才不使用副翼练吊机。
板身机看起来总觉变态,还是象真花式机来劲。
习惯上,我们会使用副翼控制飞机滚转。
飞机反扭力自旋,会不自觉使用副翼,不然会有失控感,要注意。
用升降舵控制飞机的俯仰;用方向舵控制左右摆动,保持飞机垂直向上!练习小试感受失速、浆气流对舵面的影响:1,进入失速(进入方式很多,以下是方式比较温柔)a,平飞、收油,当飞机速度下降;b,需要少量拉杆才能维持平飞时,加大拉杆量让飞机以20-30度仰角平飞;c,维持姿态和高度,当飞机开始下沉、有些失控,进入失速态;2,拉足杆、急尽风门,做小半径急筋斗,小油改平出。
请注意,它和平时做的筋斗有本质区别:是在失速状态下,靠浆气流完成的。
这小试动作,看上去,更象体操单杠大回环。
多试几次,细心感觉,是否觉得有点新鲜,过瘾的?吊机练习1,进入失速;2,拉足杆、急尽风门,把飞机垂直拉起。
3,风门控制并保持高度;升降舵控制俯仰;方向舵控制左右,保持飞机垂直。
小提示:1,试舵(不用担心反舵)飞机很快自旋,不要理会飞机的方向,目测飞机是否垂直。
如有偏差,要分清俯仰还是左右,凭感觉用小舵试纠正:如果偏差改善,同一方向继续使舵;如果偏差恶化,迅速反方向大舵纠正。
请注意:失速时的舵面效应=[舵量]X[风门(转速)]X[用舵时间]。
注意舵量和风门的配合。
有可能的话,尽量选用4C发动机,它的油门反应比2C快很多。
2C发动机只能靠舵量和用舵时间调节。
2,有些飞机的俯仰和摆动惯量较大,当纠正后还有继续摆动的倾向,反方向小舵制止。
3,吊机高度,太高姿态判断困难,根据各自的逃生能力尽量低,通常在10米左右。
4,练习时,如果有风,任由飞机随风飘走,但一定要保持飞机垂直!远了回到上风再来。
因、此,选无风或小风的天气是必要的。
经验中,早上太阳未发火前,风很小。
5,每次下来,趁感觉还在,有必要作快速总结分析。
6,吊机练习需要高度集中精神,要避免分神。
请打招呼的同好别误解没礼貌。
经过40-60分钟训练,大脑的反射区已经基本形成。
如果可以吊10-20秒,旋转3-5圈,恭喜你,你已经基本掌握吊机了!尽管看上去有些摇晃,练习3-4个周末,错舵率减少、用舵准确后,就可以降低高度,爽吊一把了。
吊机就这么简单!!要提醒注意了,这时候最容易摔机!因为这时开始放肆,图刺激~~。
的开始练习时,小心翼翼,倒不摔。
各自需要根据自己的心理承受能力,在刺激和麻烦间取平衡。
3D游戏图的,不就刺激吗?摔机也没什么可怕的,我以前介绍过“纸巾快速补机法”,可以轻松再飞。
设置舵面吊机不需要很大的舵面角度,考虑初练者逃生、其他花式需要,设为45度为宜。
我的舵面一般设为略大于45度:50度。
再大对于控制来说就没意义了。
由于舵面大,操控机构的回差(虚位)在舵面上有较大的反映,除油门外,最好使用带轴承的优质舵角;舵机摇臂输出使用(直升机用)球头。
铰链最好选用带轴的,纸铰链会在大舵时抵消很多的舵机扭力。
而且作用舵面净扭力减少,舵面反应会变慢。
重心设定按正常平飞设定即可,无须特别设定。
重心和机翼受力有关,吊机时,机翼乘托力为0,只起到自旋时阻力板的作用。
仰停对重心倒是敏感的,如有吊机功力,怎麽仰停都没问题。
由于本人近日公务繁忙,以下从简,日后另文祥述拉力线与平衡3D练习机一般不需要调整。
象真机类的设置,日后另文祥述。
动力最好使用四冲程发动机,它有两好处:1,油门响应快,可以产生短暂的强气流影响尾舵而飞机的拉力和速度并无太大的改变。
2C发动机当浆气流(转速)到需要的时候,飞机的累积速度会增加到脱离失速态,吊机没问题,其他花式会受制。
2,省油,同样拉力下,油耗是2C的1/2,这对飞机的拉重比提升有好处。
尽管燃料费用并不节省。
4C发动机最好使用减震架。
拉重比:起码1.2以上,因为用舵时,舵面产生横向分力的同时,也产生机尾方向的分力,会抵消部分浆拉力。
所以用舵时,油门同步“点油”是有必要的,这也是使用4C发动机的理由。
听说TS新出专为3D使用的52级2C发动机,也可以考虑。
浆:仰停时,比较畏惧反旋力,所以喜欢使用浆角小的浆,如果拉力足够,大浆角滚转得爽,快。
电子设备:推荐使用S3001舵机,3D机的舵机轴径向力很大,3001输出轴有滚珠轴承,磨损和和虚位小;FUTABA的舵机设计有过人之处,在9V下使用仍然正常,但大于8V电机容易损坏,7.5V以下使用是安全的。
我的飞机,都采用两节1200mAH锂离子电池,专门设计的超低动态内阻7.0V稳压电源,使用一年多了,仍然反应凌厉,媲美500元的快速舵机。
日后另文祥述遥控器设定:1,除风门外,所有舵机输出设定在150%;2,曲线:副翼25%;升降舵和方向舵不大于35%;逐步减小,我现在用线性(0%)。
3,混控:吊机不需要混控。
我的飞机只设ELE-FLAP,用于平螺旋和空中急停。
有些遥控器没有方向舵曲线,可以用"rudder-rudder"跌加,获得折线响应。
日后另文祥述以前飞完教练机,问老鸟3A如何,回答说:一条直线可能要飞10年!免!我的目的,是弄点刺激的娱乐把戏,在周六、日上午闹出一身汗后,回家洗个澡午睡。
闹3A的话可能一条直线都没飞完,就睡着、摔机了!这种事有专门的人去折腾。
偶然机会,从筋斗机开始玩起花式飞行,仔细探索起来还挺有味道。
如果把3A飞机和游戏比喻为经过净化的世界的话,象真机的花式飞行就是还原了的真实世界。
我现在倒有兴趣挑战精确飞行。