摄像机坐标系
摄像机标定张正友教材

~ ~ sm HM
上式中包含XY 两个方程;H为3乘3矩阵,包 含一个齐次坐标与8个未知数,要求出H,至 少需要8个方程,也就是说,一幅图片至少需 要已知的4个点才能求出H。
求解内置参数矩阵A
r1 r2 1
1
A 1h1 A 1h2
T T 1 h1 A A h2 0
T T 1 T T 1 h1 A A h1 h2 A A h2
精度高,过程复杂,需要高精度已知信息。 2.主动视觉摄像机标定方法 已知摄像机的某些运动信息。可线性求解,鲁棒性高, 但大多数场合不能得到摄像机运动信息。 3.摄像机自标定方法 靠多幅图像之间的关系进行标定,灵活性强,非线性 标定, 鲁棒性不高。
2 成像变换与摄像机模型、参数
• 图像数字化
O1在 u , v 中的坐标为 u 0 , v0 象素在轴上的物理尺寸为 dx, dy
基于三个非共线点在特殊运动下的摄像机标定
• 我们知道至少三点可以确定一个平面,而张正友的标定方 法正是基于两个平面的匹配,所以三个非共线点的标定方 法理论是可行的。 该方法步骤: • 1 旋转3个非共线点 • 2 得到中心点O与o坐标 • 3 根据约束条件建立方程 • 4 求解内参矩阵K • 5 求解外参[R,t] 图像的成像模式:
(v11 v22 )T b 0
T
vij b
T
h A A h2 0
T T 1 h1T AT A1h1 h2 A A h2
v12T b 0 (v11 v 22)T
Vb 0
• B矩阵的解出,相机内参矩阵A也就求解出,从而每张图像的 R,t也迎刃而解
6.通过求最小参数值,优化所有的参数
摄像机标定方法及原理
x Xf
O
X
L1
P(X,Y)
Pf (u,v)
Y Yf
L2
Zw
p(x,y,z)
z
(xw,yw,zw) Xw Yw
图1 摄像机标定中常用坐标系
?计算机视觉常用坐标系采用右手准则来定 义,图1 表示了三个不同层次的坐标系统:
1.世界坐标系 2.摄像机坐标系 3.图像坐标系(图像像素坐标系和图像物理
个参数称为摄像机的外部参数。
? 2.图像坐标系与摄像机坐标系变换关系
摄像机坐标系中的一点p在图像物理坐标系中像 点P坐标为:
? X ? fx / z
??Y ? fy / z
(3)
? 齐次坐标表示为:
?X ?
z
? ?
Y
? ?
?
?f
? ?
0
?0
0 f 0
0 0 f
0? ?x ?
0
? ?
? ?
y
? ?
? 转化为齐次坐标为:
?u? ?fx 0 z??v??? ??0 fy ??1?? ??0 0
u0 v0 1
0? 00???????0RT
?xw? T1???????zyww???? ? M1M2X ? MX
?1 ?
(8)
? 这是针孔模型或者中心投影的数学表达式。
在摄像机内部参数确定的条件下,利用若
素个数。
? 因此可得物点p与图像像素坐标系中像点pf的 变换关系为:
?u ? u0 ? fsxx/ z ? fxx/ z ??v? v0 ? fsyy/ z ? fyy/ z
(6)
? 其中,fx=fsx,fy=fsy分别定义为X和Y方向的等
三种2D-3D定位算法(摄像机定标)

《2D-3D 定位算法》笔记中英对照:世界坐标系或实体坐标系(3D):object coordinate system 。
摄像机坐标系(3D): camera coordinate system 。
图像坐标系(2D): image coordinate system ,在摄像机坐标系下取x 和y 坐标即为图像坐标系。
2D-3D 点对:2D-3D correspondences ,根据投影变换将3D 点投影为2D 点。
平移变换:translation projection 旋转变换:rotation projection 比例变换:scale projection透视投影变换:perspective projection 正交投影变换:orthographic projection2D-3D 定位算法:根据 已给出的若干对 3D 点p i (在世界坐标系或实体坐标系下)和 相对应的 2D 点p i '(在图像坐标系下或在摄像机坐标系下取x 和y 坐标),求出之间的投影变换矩阵(旋转变换和平移变换)。
文献1:《A Comparison of 2D-3D Pose Estimation Methods 》 文献2:《A Comparison of Iterative 2D-3D Pose Estimation Methods for Real-Time Applications 》 文献3:《计算机视觉》-马颂德一、CamPoseCalib(CPC)1、基本思想:根据非线性最小二乘法,最小化重投影误差求出投影参数),,,,,(γβαθθθθθθθz y x =。
2、算法过程:(1)已给出若干点对)'~,(i i p p ,其中i p 是实体坐标系下的3D 点,'~i p 我理解为事先给出的图像坐标系下的2D 点,应该是给出的测量值 。
(2)将i p 先经过旋转变换 i z y x p R R R ⋅⋅⋅)()()(γβαθθθ 和平移变换 Tz y x ),,(θθθ ,得到摄像机坐标系下的点i z y x Tz y x i p R R R p m ⋅⋅⋅+=)()()(),,(),(γβαθθθθθθθ 。
摄像机坐标系
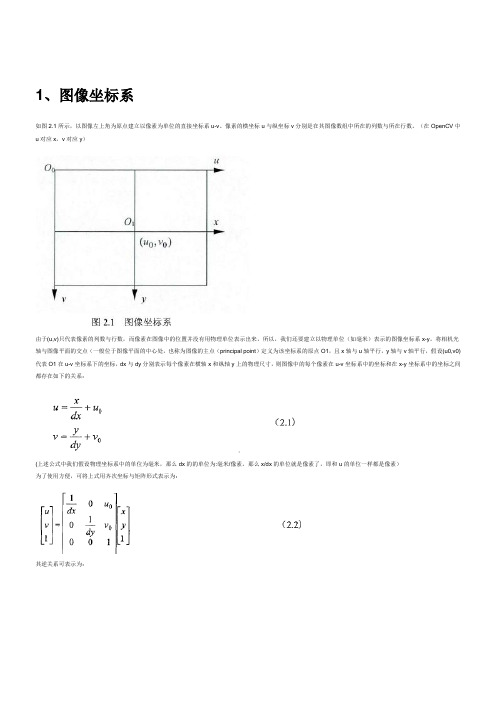
1、图像坐标系如图2.1所示,以图像左上角为原点建立以像素为单位的直接坐标系u-v。
像素的横坐标u与纵坐标v分别是在其图像数组中所在的列数与所在行数。
(在OpenCV中u对应x,v对应y)由于(u,v)只代表像素的列数与行数,而像素在图像中的位置并没有用物理单位表示出来,所以,我们还要建立以物理单位(如毫米)表示的图像坐标系x-y。
将相机光轴与图像平面的交点(一般位于图像平面的中心处,也称为图像的主点(principal point)定义为该坐标系的原点O1,且x轴与u轴平行,y轴与v轴平行,假设(u0,v0)代表O1在u-v坐标系下的坐标,dx与dy分别表示每个像素在横轴x和纵轴y上的物理尺寸,则图像中的每个像素在u-v坐标系中的坐标和在x-y坐标系中的坐标之间都存在如下的关系:(上述公式中我们假设物理坐标系中的单位为毫米,那么dx的的单位为:毫米/像素。
那么x/dx的单位就是像素了,即和u的单位一样都是像素)为了使用方便,可将上式用齐次坐标与矩阵形式表示为:其逆关系可表示为:2、相机坐标系相机成像的几何关系可由图2.2表示。
其中O点为摄像机光心(投影中心),Xc轴和Yc轴与成像平面坐标系的x轴和y轴平行,Zc轴为摄像机的光轴,和图像平面垂直。
光轴与图像平面的交点为图像的主点O1,由点O与Xc,Yc,Zc轴组成的直角坐标系称为摄像机的坐标系。
OO1为摄像机的焦距。
3、世界坐标系世界坐标系是为了描述相机的位置而被引入的,如图2.2中坐标系OwXwYwZw即为世界坐标系。
平移向量t和旋转矩阵R可以用来表示相机坐标系与世界坐标系的关系。
所以,假设空间点P在世界坐标系下的齐次坐标是(Xw,Yw,Zw,1)T,(这里T是上标转置),在相机坐标下的齐次坐标是(Xc,Yc,Zc,1)T,则存在如下的关系:上式中R是3×3的正交单位矩阵(也成为旋转矩阵),t是三维的平移向量。
矢量0=(0,0,0),M1是4×4矩阵。
相机标定算法
相机标定算法摄像机标定是用来计算摄像机的运动参数的重要步骤,它可以把摄像机的物理坐标系与图像坐标系(像素坐标系)相关联。
与处理传统图像不同,机器视觉要处理数字信号,因此摄像机标定是机器视觉系统中一个非常重要的环节。
本文介绍了摄像机标定的原理、方法和结果分析,并介绍了常用的摄像机标定算法及其特点,以便于更多的应用。
一、摄像机标定的原理摄像机标定是一种从照片中识别物体坐标系的方法,它的原理是基于三角测量算法,需要在机器视觉系统中提前定义了实物内部的若干个特征点,根据这些临时点的位置,就可以计算出摄像机坐标系和图像坐标系之间的关系,从而实现机器视觉系统的精确测量。
二、摄像机标定的方法摄像机标定有多种方法,一般来说,采用的方法有极小二乘法(least squares)、基于模板的方法、单应矩阵,以及深度学习法等。
1.极小二乘法(least squares)极小二乘法是用来计算实物在摄像机空间中坐标系下的坐标,它可以通过计算实物上光学特征点在摄像机坐标系下的坐标与摄像机图像上由特征点检测得到的坐标之间的差值来实现标定,从而给出摄像机的参数。
2.基于模板的方法基于模板的方法也叫多视场校正,是最常见的摄像机标定方法之一,它的原理是将位置处于固定的模板特征点投射到摄像机图像坐标系中,并结合摄像机图像坐标系中的特征点来求解摄像机的参数。
由于模板的临时点可以很容易被识别,该方法简单快捷,是机器视觉系统中常用的标定方法。
3.单应矩阵单应矩阵法是比较常用的摄像机标定算法之一,它使用了两个平面上的点对来对摄像机运动进行标定,它可以将视场中的三维空间投射到图像平面形成新的图像,从而得到摄像机运动参数及内参。
4.深度学习法深度学习法是近几年新兴的技术,它也可用于摄像机标定。
该方法主要是使用深度学习网络来识别图像中的特征点,再针对特征点及其相对位置关系来对摄像机运动参数进行标定。
优点是数据量不大,标定效果较好,但由于目前深度学习技术尚不成熟,其计算速度和准确度仍是技术上的瓶颈。
相机光心标定原理

相机光心标定原理1. 引言相机光心标定是计算机视觉中的一项重要任务,它是确定相机成像的中心点或光学轴位置的过程。
相机光心标定对于摄像机几何校正、图像捕捉和图像处理等应用非常关键。
本文将详细讨论相机光心标定的原理和方法。
2. 相机成像原理在深入探讨相机光心标定原理之前,我们首先需要了解相机的成像原理。
数字相机通常由透镜、光圈、感光元件和成像芯片等组成。
当光线通过透镜进入相机时,光线会经过光圈调节光线的进入量,然后聚焦在感光元件上。
感光元件将光线转换为电信号,并发送给成像芯片进行数字化处理和存储。
3. 相机坐标系为了进行相机光心标定,首先需要了解相机坐标系。
相机坐标系是描述相机内部和外部参数的重要工具。
相机内部参数包括焦距、光心位置和像素尺寸等,它们是描述相机的内部特性和成像质量的关键参数。
相机外部参数是描述相机在世界坐标系下的位置和朝向的参数。
相机坐标系通常以光心为原点,定义了相机的x、y、z轴方向。
x轴通常指向相机的右侧,y轴指向相机的上方,z轴指向相机的光轴方向。
利用相机坐标系,我们可以将相机成像点的二维坐标和实际物体的三维坐标进行对应。
4. 光心标定方法接下来将介绍几种常用的相机光心标定方法。
4.1. 标定板法标定板法是相机光心标定中最常用的方法之一。
它使用一个已知形状和尺寸的标定板,在不同位置和角度下拍摄多张图片。
然后通过分析拍摄到的图像,可以计算出相机的内部和外部参数。
标定板通常具有特殊的形状和纹理,如棋盘格。
这种纹理可以通过图像处理算法检测和提取,从而确定棋盘格上角点的位置。
通过角点的位置,可以反向计算出相机的内部和外部参数,包括光心位置。
4.2. 三维物体法三维物体法利用已知位置和尺寸的三维物体,在不同位置和角度下拍摄多张图片。
通过在图片中检测和提取物体的特征点,然后反向计算出相机的内部和外部参数。
三维物体法相对于标定板法来说,不需要特殊的标定板,因此更具灵活性。
但它对于物体的尺寸和形状的要求较高,需要确保物体能够提供足够的特征点用于计算。
图像坐标:世界坐标系,相机坐标系,图像坐标系

图像坐标:世界坐标系,相机坐标系,图像坐标系世界坐标系(X W,Y W,Z W):其是⽬标物体位置的参考系。
除了⽆穷远,世界坐标可以根据运算⽅便与否⾃由放置。
在双⽬视觉中世界坐标系主要有三个⽤途:1、标定时确定标定物的位置2、作为双⽬视觉的系统参考系,给出两个摄像机相对世界坐标系的关系,从⽽求出相机之间的相对关系3、作为重建得到三维坐标的容器,盛放重建后的物体的三维坐标。
世界坐标系是将看见中物体纳⼊运算的第⼀站。
摄像机坐标系(X C,Y C,Z C):其是摄像机站在⾃⼰⾓度上衡量的物体的坐标系。
摄像机坐标系的原点在摄像机的光⼼上,z轴与摄像机光轴平⾏。
它是与拍摄物体发⽣联系的桥头堡,世界坐标系下的物体需先经历刚体变化转到摄像机坐标系,然后在和图像坐标系发⽣关系。
它是图像坐标与世界坐标之间发⽣关系的纽带,沟通了世界上最远的距离。
哈哈图像坐标系(x,y)/(u,v) :其是以摄像机拍摄的⼆维照⽚为基准建⽴的坐标系。
⽤于指定物体在照⽚中的位置。
我更倾向将(x,y)称为连续图像坐标或空间图像坐标,将(u,v)称为离散图像坐标系或者是像素图像坐标系(虽然这样的称呼未经考证,但更能传达⼆者的物理意义)。
(x,y)坐标系的原点位于摄像机光轴与成像平⾯的焦点O’(u0,v0)上,单位为长度单位(⽶)。
(u,v)坐标系的原点在图⽚的左上⾓(其实是存储器的⾸地址)如上图所⽰,单位为数量单位(个)。
(x,y)主要⽤于表征物体从摄像机坐标系向图像坐标系的透视投影关系。
⽽(u,v)则是实实在在的,我们能从摄像机中得到的真实信息。
(x,y)与(u,v)存在如下转换关系:dx代表x轴⽅向⼀个像素的宽度,dy代表y轴⽅向上⼀个像素的宽度。
dx、dy为摄像机的内参数。
(u0,v0)称为图像平⾯的主点,也是摄像机的内参数。
其实相当于对x轴和y轴的离散化。
其可以运⽤齐次坐标,将上式写成矩阵形式,如下:(1)式运⽤了齐次坐标,初学者可能会感到有些迷惑。
OpenGL学习笔记:三维数学基础(一)坐标系、向量、矩阵
OpenGL学习笔记:三维数学基础(⼀)坐标系、向量、矩阵接触OpenGL和计算机图形学有⼀段时间了,⼀直想写⼀点东西,记录⾃⼰的学习历程,或许也能够为有意愿向计算机图形学发展的菜鸟们提供⼀条捷径。
闲话不多说,本章主要介绍计算机图形学中三维数学的⼀些基础知识,主要包括2D、3D笛卡尔坐标系,向量、矩阵的数学和⼏何意义以及公式。
由于篇幅限制,其中的推导过程本⽂不作叙述,感兴趣的读者可以去看《3D数学基础+图形与游戏开发》,已上传,链接地址在本⽂末尾。
⼀、计算机图形学计算机图形学(Computer Graphics)是⼀种使⽤数学算法将⼆维或三维图形转化为计算机显⽰器的栅格形式的科学。
其⼴泛应⽤于游戏、动画、仿真、虚拟现实(VR)、增强现实(AR)等领域。
在数学之中,研究⾃然数和整数的领域称为离散数学,研究实数的领域称作连续数学。
在计算机图形学中,为虚拟世界选择度量单位的关键是选择离散的精度。
⼀种错误的观点认为short、int是离散的,⽽float、double是连续的,⽽事实上,这些数据类型都是离散的。
于是,计算机图形学有如下准则:计算机图形学第⼀准则:近似原则——如果它看上去是对的,它就是对的。
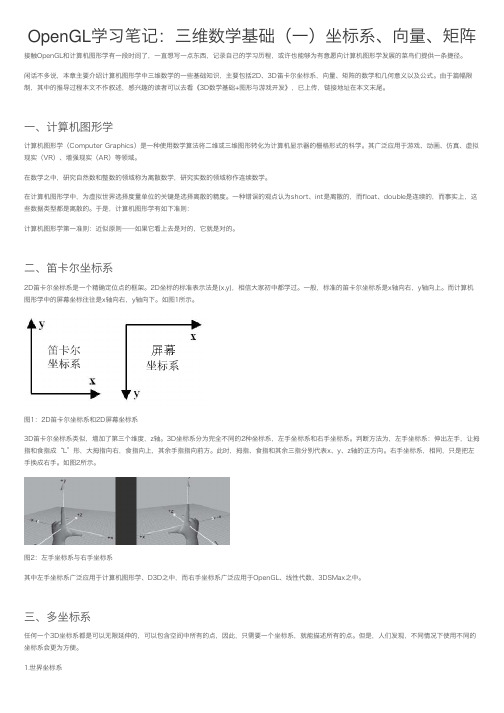
⼆、笛卡尔坐标系2D笛卡尔坐标系是⼀个精确定位点的框架。
2D坐标的标准表⽰法是(x,y),相信⼤家初中都学过。
⼀般,标准的笛卡尔坐标系是x轴向右,y轴向上。
⽽计算机图形学中的屏幕坐标往往是x轴向右,y轴向下。
如图1所⽰。
图1:2D笛卡尔坐标系和2D屏幕坐标系3D笛卡尔坐标系类似,增加了第三个维度,z轴。
3D坐标系分为完全不同的2种坐标系,左⼿坐标系和右⼿坐标系。
判断⽅法为,左⼿坐标系:伸出左⼿,让拇指和⾷指成“L”形,⼤拇指向右,⾷指向上,其余⼿指指向前⽅。
此时,拇指、⾷指和其余三指分别代表x、y、z轴的正⽅向。
右⼿坐标系,相同,只是把左⼿换成右⼿。
如图2所⽰。
图2:左⼿坐标系与右⼿坐标系其中左⼿坐标系⼴泛应⽤于计算机图形学、D3D之中,⽽右⼿坐标系⼴泛应⽤于OpenGL、线性代数、3DSMax之中。
世界坐标系到相机坐标系变换矩阵 欧拉角计算

世界坐标系到相机坐标系变换矩阵及欧拉角计算一、概述在计算机视觉和计算机图形学领域中,世界坐标系到相机坐标系变换矩阵和欧拉角计算是非常重要且常用的技术。
本文将通过具体的介绍和示例,详细讨论世界坐标系到相机坐标系变换矩阵及欧拉角的计算方法。
二、世界坐标系和相机坐标系简介1. 世界坐标系世界坐标系是指在三维空间中描述物体位置和方向的坐标系。
它通常是一个固定的参考框架,用于描述物体在空间中的位置和姿态。
2. 相机坐标系相机坐标系是相机传感器坐标系中的一个坐标系,它描述了相机的位置和方向。
相机坐标系通常位于相机传感器中心,其坐标轴与传感器平面平行。
三、世界坐标系到相机坐标系变换矩阵的推导1. 坐标变换原理当世界坐标系中的物体经过相机的观测时,需要将物体的坐标转换到相机坐标系中。
这个转换过程可以通过一个变换矩阵来实现,该矩阵包括平移、旋转和缩放等变换操作。
2. 变换矩阵的计算设世界坐标系下的一个物体点坐标为Pw = (Xw, Yw, Zw),相机坐标系下的坐标为Pc = (Xc, Yc, Zc)。
那么Pc与Pw之间的变换关系可以表示为:Pc = T * R * Pw其中T为平移矩阵,R为旋转矩阵。
根据相机的内参矩阵和外参矩阵,可以得到T和R的具体数值,进而得到世界坐标系到相机坐标系的变换矩阵。
四、欧拉角的计算方法1. 欧拉角的定义欧拉角是描述物体姿态的一种方式,它由三个角度组成,通常分别表示绕三个坐标轴的旋转角度。
2. 欧拉角的计算在计算机视觉中,通常使用旋转矩阵或四元数来表示物体的旋转姿态。
而将旋转矩阵或四元数转换为欧拉角则是一个常见的需求。
欧拉角的计算方法有多种,常见的包括将旋转矩阵转换为欧拉角、将四元数转换为欧拉角等。
五、示例分析以下将通过一个具体的示例来演示世界坐标系到相机坐标系的变换矩阵和欧拉角的计算方法。
假设世界坐标系中的一个物体点坐标为Pw = (1, 1, 1),相机坐标系的内参矩阵为K,外参矩阵为[R|T]。
相机获取三维坐标的方法

相机获取三维坐标的方法
相机获取三维坐标的方法有很多种,其中最常见的是通过摄像机的投影矩阵和深度图像来计算。
具体步骤如下:
1. 通过相机标定得到摄像机的内外参数,包括摄像机的内部参数(如焦距、主点坐标等)和外部参数(如相机位置和朝向等)。
2. 在拍摄时,获取深度图像。
深度图像是由激光或红外线等设备发出的光线与物体表面的反射光线之间的时间差或相位差计算得出的。
3. 将深度图像转换为点云数据。
这里需要将深度图像上每个像素的深度值转换为点云数据中每个点的坐标值。
4. 通过摄像机的内外参数和点云数据,计算出每个点在世界坐标系中的坐标值。
这里需要利用摄像机的投影矩阵将点云数据从相机坐标系转换为世界坐标系。
5. 根据需要,可以对点云数据进行后续处理,如进行三维重建、物体识别等。
总之,相机获取三维坐标的方法是一个比较复杂的过程,需要涉及到相机标定、深度图像生成、点云数据处理等多个方面。
但是通过这种方法,可以获得物体的三维信息,为计算机视觉和机器人视觉等领域的应用提供了重要的基础。
- 1 -。
世界坐标系和相机坐标系,图像坐标系的关系

、四个坐标系简介和转换相机模型为以后一切标定算法的关键,只有这边有相当透彻的理解,对以后的标定算法才能有更好的理解。
本人研究了好长时间,几乎每天都重复看几遍,最终才会明白其推导过程。
我觉得首先我们要理解相机模型中的四个平面坐标系的关系:像素平面坐标系(u,v )、像平面坐标系(图像物理坐标第(x,y )、相机坐标系(Xc,Yc,Zc )和世界坐标系(Xw,Yw,Zw),在每一篇介绍相机模型的文章中都有介绍。
我刚开始理解时,看着那一堆的公式十分的头晕,我相信很多初学者和我一样,但仔细想想,只不过是,我们假设了一些参数,使四个坐标系之间的坐标联系起来,这样我们就可以从拍摄的图片上一个点坐标一路反推出世界中的那个点的坐标,这样就达到了我们的目的,三维重建。
而那些我们假设的参数,就是我们要标定的内外参数。
1、像素坐标与像平面坐标系之间的关系确定他们的关系之前,我们可以假设每一个像素在u轴和v轴方向上的物理尺寸为dx和dy。
仔细看下他们的模型可以推出以下公式(这个还是比较好理解的):解释:1、dx,dy,u0,v0 其实都是我们假设出来的参数,dxdy 表示感光芯片上像素的实际大小,是连接像素坐标系和真实尺寸坐标系的,u0,v0 是图像平面中心,最终是要我们求的内外参数。
得出这个公式后我们可以运用线性代数的知识把方程用矩阵形式表示:当然我们也可以用另一种矩阵形式表示:2、相机坐标系与世界坐标系之间的关系这两个坐标系之间的关系我们可以旋转矩阵R 和平移矩阵T 来得到以下关系:公式4解释:1、在这个公式中,R为3*3矩阵,T为3*1 , 0 为(0, 0, 0),简化用Lw表示后为4*4矩阵。
3、成像投影关系(相机坐标系与像平面坐标系)在相机模型中我们可以得到以下公式:公式5解释:1、同样我们用矩阵形式表示:公式64、得到公式而我们可以将以上公式综合一下就可以得到:因此,内参数矩阵可以表示为:=外参矩阵可以表示为:,由旋转矩阵R 和平移向量T 组成当然在好多资料上都有这种做法:上图中表示的情况是像素坐标系和图像物理坐标系的两个坐标轴不是平行的关系,像素坐标系的两个坐标轴也不是垂直90°的关系,而图像物理坐标系的两个坐标轴是垂直关系。
世界坐标系和相机坐标系,图像坐标系的关系

一、四个坐标系简介和转换相机模型为以后一切标定算法的关键,只有这边有相当透彻的理解,对以后的标定算法才能有更好的理解。
本人研究了好长时间,几乎每天都重复看几遍,最终才会明白其推导过程。
我觉得首先我们要理解相机模型中的四个平面坐标系的关系:像素平面坐标系(u,v)、像平面坐标系(图像物理坐标第(x,y)、相机坐标系(Xc,Yc,Zc)和世界坐标系(Xw,Yw,Zw),在每一篇介绍相机模型的文章中都有介绍。
我刚开始理解时,看着那一堆的公式十分的头晕,我相信很多初学者和我一样,但仔细想想,只不过是,我们假设了一些参数,使四个坐标系之间的坐标联系起来,这样我们就可以从拍摄的图片上一个点坐标一路反推出世界中的那个点的坐标,这样就达到了我们的目的,三维重建。
而那些我们假设的参数,就是我们要标定的内外参数。
1、像素坐标与像平面坐标系之间的关系确定他们的关系之前,我们可以假设每一个像素在u 轴和v轴方向上的物理尺寸为dx和dy。
仔细看下他们的模型可以推出以下公式(这个还是比较好理解的):解释:1、dx,dy,u0,v0其实都是我们假设出来的参数,dxdy表示感光芯片上像素的实际大小,是连接像素坐标系和真实尺寸坐标系的,u0,v0是图像平面中心,最终是要我们求的内外参数。
得出这个公式后我们可以运用线性代数的知识把方程用矩阵形式表示:当然我们也可以用另一种矩阵形式表示:2、相机坐标系与世界坐标系之间的关系这两个坐标系之间的关系我们可以旋转矩阵R和平移矩阵T来得到以下关系:公式4解释:1、在这个公式中,R为3*3矩阵,T为3*1,0为(0,0,0),简化用Lw表示后为4*4矩阵。
3、成像投影关系(相机坐标系与像平面坐标系)在相机模型中我们可以得到以下公式:公式5解释:1、同样我们用矩阵形式表示:公式64、得到公式而我们可以将以上公式综合一下就可以得到:因此,内参数矩阵可以表示为:=外参矩阵可以表示为:,由旋转矩阵R和平移向量T组成当然在好多资料上都有这种做法:上图中表示的情况是像素坐标系和图像物理坐标系的两个坐标轴不是平行的关系,像素坐标系的两个坐标轴也不是垂直90°的关系,而图像物理坐标系的两个坐标轴是垂直关系。
机器视觉测量中的各坐标系及其转换关系

问: 请阐述机器视觉测量中的各坐标系及其转换关系.答:1)图像坐标系(Pixel coordinate system)摄像机采集的数字图像在计算机内可以存储为数组,数组中的每一个元素(象素,pixel)的值即是图像点的亮度(灰度)。
如图4.1所示,在图像上定义直角坐标系u-v ,每一象素的坐标(u,v)分别是该象素在数组中的列数和行数。
故(u,v)是以象素为单位的图像坐标系坐标。
2)成像平面坐标系(Retinal coordinate system) 由于图像坐标系只表示象素位于数字图像的列数和行数,并没有用物理单位表示出该象素在图像中的物理位置,因而需要再建立以物理单位(例如厘米)表示的成像平面坐标系x-y ,如图4.1所示。
我们用(x,y)表示以物理单位度量的成像平面坐标系的坐标。
在x-y 坐标系中,原点1O 定义在摄像机光轴和图像平面的交点处,称为图像的主点(principal point),该点一般位于图像中心处,但由于摄像机制作的原因,可能会有些偏离,1O 在坐标系下的坐标为(u0,v0),每个象素在x 轴和y 轴方向上的物理尺寸为dx 、dy ,两个坐标系的关系如下:其中s'表示因摄像机成像平面坐标轴相互不正交引出的倾斜因子(skew factor)。
3)摄像机坐标系(Camera coordinate system)摄像机成像几何关系可由图4.2表示,其中O 点称为摄像机光心,c X 轴和C Y 轴与成像平面坐标系的x 轴和y 轴平行,C Z 轴为摄像机的光轴,和图像平面垂直。
光轴与图像平面的交点为图像主点O',由点O 与,,C C C X Y Z 轴组成的直角坐标系称为摄像机坐标系。
OO'为摄像机焦距。
4)世界坐标系(World coordinate system)在环境中还选择一个参考坐标系来描述摄像机和物体的位置,该坐标系称为世界坐标系。
摄像机坐标系和世界坐标系之间的关系可用旋转矩阵R 与平移向量t 来描述。
坐标系的种类与变换的种类

计算机图形学(图形变换)默认分类2008-06-03 19:31:02 阅读89 评论0 字号:大中小订阅图形:多边形构成,顶点去诶的那个位置运动都是相对的,因此运动可以看成两种,A动B不动作为参照物(系),或者反过来。
因此坐标变换也就分为了两种:1坐标系不动,图形运动——同物异位2图形不动,坐标系运动——同物异标局部坐标系——世界坐标系——摄像机坐标系——视平面坐标系——设备坐标系坐标系引申:1)世界坐标系(world coordinate Systems),该坐标系统主要用于计算机图形场景中的所有图形对象的空间定位和定义,包括观察者的位置、视线等等。
计算机图形系统中涉及的其它坐标系统都是参照它进行定义。
2)局部坐标系(Local Coordinate System),主要为考察物体方便起见,独立于世界坐标系来定义物体几何特性,通常是在不需要指定物体在世界坐标系中的方位的情况下,使用局部坐标系。
一旦你定义“局部”物体,通过指定在局部坐标系的原点在世界坐标系中的方位,然后通过几何变换,就可很容易地将“局部”物体放入世界坐标系内,使它由局部上升为全局。
3)观察坐标系(Viewing coordinate systems),观察坐标系通常是以视点的位置为原点,通过用户指定的一个向上的观察向量(view up vector)来定义整个坐标系统,缺省为左手坐标系,观察坐标系主要用于从观察者的角度对整个世界坐标系内的对象进行重新定位和描述,从而简化几何物体在投影面的成像的数学推导和计算。
4)成像面坐标系统,它是一个二维坐标系统,主要用于指定物体在成像面上的所有点,往往是通过指定成像面与视点之间的距离来定义成像面,成像面有时也称投影面,可进一步在构影面上定义称为窗口的方形区域来实现部分成像。
5)屏幕坐标系统,也称设备坐标系统,它主要用于某一特殊的计算机图形显示设备(如光栅显示器)的表面的点的定义,在多数情况下,对于每一个具体的显示设备,都有一个单独的坐标系统,在定义了成像窗口的情况下,可进一步在屏幕坐标系统中定义称为视图区(view port)的有界区域,视图区中的成像即为实际所观察到的。
双目摄像机标定
1.摄像机标定技术的发展和研究现状计算机视觉的研究目标是使计算机能通过二维图像认知三维环境,并从中获取需要的信息用于重建和识别物体。
真实的3D场景与摄像机所拍摄的2D图像之间有一种映射关系,这种关系是由摄像机的几何模型或者参数决定的。
求解这些参数的过程就称为摄像机标定。
摄像机标定实质上是确定摄像机内外参数的一个过程,其中内部参数的标定是指确定摄像机固有的、与位置参数无关的内部几何与光学参数,包括图像中心坐标、焦距、比例因子和镜头畸变等;而外部参数的标定是指确定摄像机坐标系相对于某一世界坐标系的三维位置和方向关系。
总的来说, 摄像机标定可以分为两个大类: 传统的摄像机标定方法和摄像机自标定法。
传统摄像机标定的基本方法是, 在一定的摄像机模型下, 基于特定的实验条件如形状、尺寸已知的参照物, 经过对其进行图像处理, 利用一系列数学变换和计算方法, 求取摄像机模型内部参数和外部参数。
另外, 由于许多情况下存在经常性调整摄像机的需求, 而且设置已知的参照物也不现实, 这时就需要一种不依赖参照物的所谓摄像机自标定方法。
这种摄像机自标定法是利用了摄像机本身参数之间的约束关系来标定的, 与场景和摄像机的运动无关, 所以相比较下更为灵活。
1966年,B. Hallert研究了相机标定和镜头畸变两个方面的内容,并首次使用了最小二乘方法,得到了精度很高的测量结果。
1975年,学者W. Faig建立的一种较为复杂的相机成像模型,并应用非线性优化算法对其进行精确求解,但是仍存在两个缺点,一是由于加入了优化算法导致速度变慢,二是标定精度对相机模型参数的初始值的选择有严重的依赖性,这两个缺点就导致了该标定方法不适于实时标定。
1986年Faugeras提出基于三维立方体标定物通过拍摄其单幅图像的标定方法,该方法是基于理想线性模型的,标定精度较高,但是对标定立方体的制作和加工的精度要求太高,维护起来困难且并未考虑畸变参数的影响。
相机归一化坐标
相机归一化坐标相机归一化坐标是计算机视觉和计算机图形学领域中的一种重要概念,它在三维重建、立体视觉、姿态估计等方面有着广泛的应用。
相机归一化坐标是指将相机坐标系中的三维点表示为一个具有单位尺度的四维向量,其中第四维为1。
本文将从定义、计算、应用三个方面进行介绍。
定义在相机坐标系中,三维点的坐标表示为(x, y, z),其中z轴指向相机光心,x轴和y轴分别指向相机平面的水平和垂直方向。
在相机坐标系中,三维点的坐标尺度是任意的,因此无法对其进行比较或计算。
为了解决这个问题,我们需要将相机坐标系中的三维点表示为一个具有单位尺度的四维向量,即相机归一化坐标。
计算将相机坐标系中的三维点表示为一个具有单位尺度的四维向量,需要进行如下计算:1. 将三维点表示为一个四维向量(x, y, z, 1);2. 将四维向量进行归一化,即将其除以第四个分量1,得到(x/w, y/w,z/w, 1/w);3. 由于相机归一化坐标的第四个分量始终为1,因此可以将其去掉,得到相机归一化坐标为(x/w, y/w, z/w)。
应用相机归一化坐标在计算机视觉和计算机图形学领域中有着广泛的应用,如三维重建、立体视觉、姿态估计等。
其中,三维重建是指从多个二维图像中恢复出三维场景的过程。
在三维重建中,需要将多个二维图像中的特征点通过三角测量的方式计算出其在三维空间中的位置。
由于不同的图像可能存在不同的相机内参和外参,因此需要将特征点的坐标从相机坐标系中转换到世界坐标系中,这就需要将相机归一化坐标转换为世界坐标系中的坐标。
立体视觉是指通过两个或多个摄像机对同一场景进行拍摄,然后通过计算两个图像之间的对应关系来恢复出场景的三维结构。
在立体视觉中,需要将两个图像中的特征点通过极线几何的方式计算出其在相机坐标系中的位置,然后将其转换为相机归一化坐标。
通过对两个相机的内参和外参进行标定,可以将相机归一化坐标转换为世界坐标系中的坐标。
姿态估计是指通过计算相机在三维空间中的位置和方向来估计相机的姿态。
机器视觉中坐标系转换和图像平移

第二次作业机器视觉中坐标系转换和图像平移一、坐标系转换1.1、世界坐标系和相机坐标系世界坐标系,也称为测量坐标系,它是一个三维直角坐标系(Xw,Yw,Zw)。
在世界坐标系中可以描述相机和待测物体的空间位置。
世界坐标系的位置根据实际情况自行确定。
相机坐标系也是一个三维直角坐标系(xc,yc,zc)。
相机坐标系的原点是镜头的光心,x 、y 轴分别与相面的两边平行,z 轴为镜头的光轴,与像平面垂直。
世界坐标系到相机坐标系的变换是刚体变换,也就是只改变物体的空间位置(平移)和朝向(旋转),而不改变物体的形状。
用旋转矩阵R 和平移向量t 可以表示这种变换。
在齐次坐标下,旋转矩阵R 是正交矩阵,可通过Rodrigues 变换转换为只有三个独立变量的旋转向量。
因此刚体变换用6个参数就可以表示(3个旋转向量,3个平移向量),这6个参数就是相机的外参。
相机外参决定了空间点从世界坐标系到相机坐标系的变换。
t z y x R z y x w w w c c c +⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡齐次坐标系下可表示为:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎦⎤⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡1101101333231232221131211w w w z y x w w w Tz y x t r r r t r r r t r r r z y x t Rz y x 1.2、相机坐标系和图像坐标系根据相似三角形原理c c z x f x =二、图像平移图像的平移变换就是将图像所有的像素坐标分别加上指定的水平偏移量和垂直偏移量。
平移变换根据是否改变图像大小分为两种,直接丢弃或者通过加目标图像尺寸的方法使图像能够包含这些点。
2.1平移变换原理假设原来的像素的位置坐标为(x0,y0),经过平移量(△x ,△y )后,坐标变为(x1,y1),如下所示:用数学式子表示可以表示为:x1=x0+△x,y1=y0+△y ;用矩阵表示为:⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡∆∆=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡1100100110011y x y x y x △x 和△y 为平移量平移后图像的大小变化:。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摄像机坐标系。摄像机坐标系是和观察者密切相关的坐标系。摄像机坐标系和屏幕坐标系相似,只不过一个处在三维环境中,一个处在二维环境中。摄像机坐标系也是一种特殊的物体坐标系。一般的摄像机坐标系都是x轴向右,y轴向上,z轴向里。
惯性坐标系。为什么这种坐标系叫惯性坐标系,不清楚。这种坐标系时在世界坐标系好物体坐标系之间的一种坐标系。惯性坐标系的原点和物体坐标系的原点重合,但惯性坐标系的坐标轴是和世界坐标系的坐标轴平行的。为什么要引入惯性坐标系呢?三维系统在运行时,不可避免的引入外部工具如3DMax做得模型,每个模型又有很多三角面,点组成。这些三角面和点得坐标都是物体坐标。所以系统中会由大量的从物体坐标向世界坐标的转换。有了惯性坐标系,可以简化他们之间的转换过程。从物体坐标系转换到惯性坐标系只需要旋转操作。从惯性坐标系到世界坐标最熟悉的坐标系,也就是我们所说的经纬度,然后再加上高程。世界坐标系描述了地球上每个点的位置。同时世界坐标系也是我们平常人关心的最大范围,用的最多的坐标系。
物体坐标系。从字面上理解就是这个物体自己的坐标系。这可能会让有些人难以理解,一个物体在世界坐标系里面有一个位置不就行了,自己还要什么坐标系。但做三维模型的技术人员一定对物体坐标系理解的很透彻。例如一只羊,以羊的心脏为原点,头,眼睛四肢,尾巴等部分都应该在什么位置。这样就明白多了吧。当这只羊咀嚼时,行走时,各个部分应该如何变换自己的位置。像这些数据肯定不能用世界坐标系表示。当这只羊置身于其他坐标系,例如世界坐标系时,再把各个部分转换成世界坐标系上的值,显示在大环境中。而物体坐标系也是一种局部坐标系。
当你选中一个原点,定义好x,y,z三个坐标轴之后,那么世界位置中的任何一个地方都是可以定义的。但实际情况我们会这样做吗?例如你在布置一间房子的时候,你可能会描述我要把这个桌子放在墙角(2,3)米的地方。你能说我放在地球多少经纬度多少度,多少分,多少秒的地方吗?很显然其他的坐标系都有存在的价值,例如局部坐标系,世界坐标系,物体坐标系,摄像机坐标系,惯性坐标系。在具体的情况下,会有具体的坐标系适合这种情况。
摄像机坐标系 摄像机坐标系是和观察者密切相关的坐标系。摄像机坐标系和屏幕坐标系相似,差别在于摄像机坐标系处于3D空间中而屏幕坐标系在2D平面里。摄像机坐标系能被看做是一种特殊的“物体”坐标系,该“物体”坐标系就定义在摄像机的屏幕可视区域。摄像机坐标系中,摄像机在原点,x轴向右,z轴向前(朝向屏幕内或摄像机方向),y轴向上(不是世界的上方而是摄像机本身的上方