动画图解机械原理(2)
经典机械结构动画图

正弦机构
该机构是具有2个移动副的四杆机构,因从动件的位移与原 动曲柄的转角的正弦成正比而得名,常用于缝纫机下针机构 和其他计算装置中。
椭圆规
动杆联接两回转副,固定导杆联接两移动副,导杆呈 十字形,动杆上各点轨迹为长短径不同的椭圆。
曲柄压力机
该机构由曲柄摇杆机构和摇杆滑块机构组成,其中CD杆是两机构的共用 件,该机构的特点是原动件在用力不太大的情况下,可产生很大的压力, 实现增力作用,常用于行程要求不大而压力要求很大的冲压、剪切等机 械中。
形锁合凸轮
为保证凸轮机构能正常工作,必须保持凸轮轮廓与从动件相接触, 该机构是靠凸轮与从动件的特殊几何结构来保持两者的接触。
滚子摆动从动件盘形凸轮机构
机构中凸轮匀速旋转,带动从动件往复摆动,滚子接 触,摩擦阻力小,不易摩擦,承载能力较大,但运动 规律有局限性,滚子轴处有间隙,不宜高速。
螺杆传动1
经典机械原理
• 机械运动原理 • 曲柄摇杆机构 • 平行机构 • 滑块机构 • 定块机构 • 螺纹螺杆等
曲柄摇杆机构
曲柄AB为原动件作匀速转动,当它由AB1转到AB2位置时,转角 φ1=180°+θ,摇杆由右极限位置C1D摆到左极限位置C2D摆角为ψ,当 曲柄从AB2转到AB1时,转角φ2=180°-θ,摇杆由位置C2D返回C1D, 其摆角仍为ψ,因为 φ1>φ2 ,对应时间t1>t2,因此摇杆从C2D转到C1D较 快,即具有急回特性,其中θ为摇杆处于两极限位置时曲柄两个位置之间 所夹的锐角,称为极位夹角。
摇ቤተ መጻሕፍቲ ባይዱ机构
该机构是通过将曲柄滑块机构中的连杆固定而演化得出, 它可把主动件的匀速回转运动转化为导杆相对于滑块的往复 移动并随滑块摆动的形式。
高级机械原理全动画图解

运动轨迹与运动规律
机构的运动轨迹是指机构中某一点或 某一构件在运动时所形成的轨迹。机 构的运动规律则是指机构中某一点或 某一构件在运动时所遵循的规律,如 简谐运动、匀速运动等。了解机构的 运动轨迹和运动规律对于确定机构的 运动性能和进行机构设计具有重要意 义。
03 连杆机构全动画图解
连杆机构类型及特点
运动副
连接两个构件并使它们之间产 生相对运动的装置,如铰链、
滑轨等。
机械原理发展历程及趋势
发展历程
机械原理经历了从手工制造到机械制造、从简单机械到复杂机械、从静态分析 到动态分析的发展历程。
发展趋势
随着计算机技术的飞速发展,机械原理正朝着数字化、智能化、集成化的方向 发展,未来将更加注重机械系统的动态性能、控制精度和节能环保等方面的研 究。
07 轮系全动画图解
轮系类型及特点
定轴轮系
所有齿轮的轴线都固定不动,适 用于传递固定传动比的运动和动
力。
周转轮系
至少有一个齿轮的轴线是绕其他齿 轮的轴线转动的,可实现复杂的运 动和动力传递。
混合轮系
定轴轮系和周转轮系的组合,兼具 两者的特点,可实现更为复杂的运 动和动力传递。
定轴轮系传动比计算方法
传动比定义
输入轴转速与输出轴转速之比, 或输出轴扭矩与输入轴扭矩之比。
传动比计算
传动比等于相邻两齿轮齿数的反 比,即i=n1/n2=z2/z1,其中n
为转速,z为齿数。
注意事项
计算传动比时需考虑齿轮的旋向, 以及是否存在变位齿轮等因素。
周转轮系传动比计算方法
传动比定义
与定轴轮系相同,为输入轴转速 与输出轴转速之比,或输出轴扭 矩与输入轴扭矩之比。
THANKS FOR WATCHING
机械原理 第二章-2相对运动图解、解析
方向:? A B
§3-3 用矢量方程图解法作机构速度和加速度分析 D A B C D A B C
大小: ? ? B 大小: ? B ? 方向: A D 方向: A D
C
C
D A B C
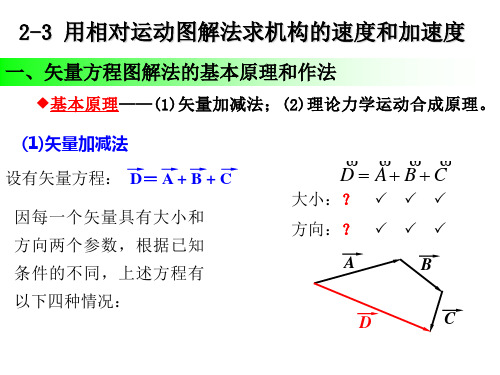
2-3 用相对运动图解法求机构的速度和加速度
一、矢量方程图解法的基本原理和作法
基本原理——(1)矢量加减法;(2)理论力学运动合成原理。
(1)矢量加减法
设有矢量方程: D= A + B + C 因每一个矢量具有大小和 方向两个参数,根据已知 条件的不同,上述方程有 以下四种情况: D C
D A B C
实际尺寸 取长度比例尺 l m / m m, 作机构运动简图。 图示尺寸
(1) 速度关系:
①根据运动合成原理,列出速度矢量方程式:
VC2 VB2 VC2B2
ω1lAB ?
大小: ?
方向: ∥xx ⊥AB ⊥BC ②确定速度图解比例尺μv( (m/s)/mm) ③作图求解未知量: 速度多边形
大小: ?
方向: ? A D
B C
特别注意矢 量箭头方向!
(2) 理论力学运动合成原理
绝对运动 = 牵连运动 + 相对运动 作法:1)根据运动合成原理 —— 列出矢量方程式。
2)根据矢量方程式 —— 作图求解。
构件间的相对运动问题可分为两类:
同一构件上的两点间的运动关系
(4) 求aE6和6
2
A
ω3 a3 5
akE6E5 =
n3
b
25vrE6E5
B ω4
ω2
35张最牛机械工作原理动图,就是这么牛!

35张最牛机械工作原理动图,就是这么牛!
30个经典机械结构动图赏析
一看就懂的机械动图集锦,让你瞬间爱上它!
10个经典机械结构动图赏析
30个经典机构动图赏析
这波机械结构动图会让你爱上机械
好玩有趣的机械动图,了解一下!
50个经典机械结构动图,全部看懂你就是机械大师了!这周最炫酷的机械动图,直观展示其工作原理!
牛叉的机械结构动图!
极致唯美4D机械原理动态图,看了会上瘾!
一目了然的机械动图,秒懂机械工作原理,干货!
8张机械动图,可能你会看一天。
这些基础的机械动态图,看不懂你就别搞机械了。
图解机械设计液压传动原理,看完就明白
精致的机械动图之美
看懂了这些机械动图,再复杂的机构原理也难不倒你有趣的机械设计原理动图,一目了然!
End
来源:网络。
机械原理 第二章-2相对运动图解、解析
速度影像原理: 同一构件上若干点形成的几 何图形与其速度矢量多边形 中对应点构成的多边形相似.
c p
极点
e b
速度多边形的特性:
1) 在速度多边形中,由极点 p
向外放射的矢量代表构件上相应 点的绝对速度,方向由极点 p 指 极点 向该点。
速度多边形
c
p
b
2)在速度多边形中,联接绝对速度矢端两点的矢量,代 表构件上相应两点的相对速度,例如 : bc 代表
1. 速度分析:
1) 依据原理列矢量方程式 将构件1扩大至与C2点重合。
B
vC2 2 C
VC 2 VC1 VC 2C1
ω1
1
大小: ? √ ? 方向: ⊥CD ⊥AC ∥AB
1
vC1 c2 (c3)
3
D 4
A
4
2) 取速度比例尺 v , 作速 度多边形,由速度多边 形得:
vC 3 vC 2 pc2 v vC 2C1 c1c2 v vC 3 pc2 v 3 lCD lCD
P
c1
( 顺时针 )
2. 加速度分析:
1) 依据原理列矢量方程式 分析:
aC2 = aC1 + aC2C1
B
2 C akC2C1
当牵连点系(动参照系)为 转动时,存在科氏加速度。 3
D 4
ω1
1
1
c2 (c3)
r k aC2C1 aC2C1 aC2C1
科氏加速度
A
4 P c1
k r a 2 v
(4) 求aE6和6
2
A
ω3 a3 5
akE6E5 =
n3
b
动图演示连杆机构工作原理,直观明了
动图演⽰连杆机构⼯作原理,直观明了
连杆机构构件运动形式多样,简单调整杆的相对长度即可实现不同的转动、摆动、移动和平⾯或空间复杂运动,从⽽可⽤于实现已知运动规律和已知轨迹。
优点:
(1)采⽤低副:⾯接触、承载⼤、便于润滑、不易磨损,形状简单、易加⼯、容易获得较⾼的制造精度。
(2)改变杆的相对长度,从动件运动规律不同。
(3)两构件之间的接触是靠本⾝的⼏何封闭来维系的,它不像凸轮机构有时需利⽤弹簧等⼒封闭来保持接触。
(4)连杆曲线丰富,可满⾜不同要求
平⾯连杆机构
导杆机构
双曲柄机构
曲柄滑块机构
铰链四杆机构
曲柄滑块机构
双摇杆机构
平⾏四边形机构
⼤筛机构。
最新机械原理动态图,直观、秒懂!

最新机械原理动态图,直观、秒懂!1.⼿臂总成2.偏⼼结构3.灌装机4.泵5.涡轮变速箱6、⽔平对置两缸发动机7、阻尼原理8、冲击夹持机构9、滚珠丝杠传动机构10、齿轮传动机构11、⾷品制作12、3D打印13、神奇的家具14、炒⽠⼦机构15、马⽿他⼗字机芯⽤于控制时钟的秒针运动16棘轮机构往复摆动的蓝⾊滑块使得棘轮旋转⽅向相同,橙⾊棘⽖和黄⾊棘⽖推动棘轮,红⾊弹簧维持棘⽖和棘轮的接触17、插床机构18、铰链机构19、印刷机构20、可以翻跟头的⾃⾏车21、飞机的星形发动机22、⼿枪的机械原理23、飞机螺旋桨同步射击器24、缝纫机25、汽车变档结构26、转⼦发动机(内燃机的⼀种,把热能转为旋转运动⽽⾮活塞运动)27、椭圆规28、等速万向节(汽车等速万向节,这就是为啥前轮驱动的汽车的轮⼦还能转)29、弹药装填系统30、直列式发动机(它的汽缸肩并肩地排成⼀排,⼀般的车都⽤。
)31、⽔平对置式发动机(汽缸排列在发动机相对的两个平⾯上)32、⽕车的推进原理(⽕车的推进原理)33、喷⽓式发动机34、双涵道涡轮发动机35、四冲程发动机⼯作原理36、离合器37、破碎机38、泥浆泵39、斯特林发动机40、太阳能加热装置动画实在太多了,还是简化⼀下吧,⼀组⼀组的上吧!41、平⾯连杆机构42、凸轮机构43、间歇运动机构44、螺旋传动带传动链传动45、齿轮传动蜗杆传动46、齿轮系41、还是⽐较期待有⼀台这样的电脑!不久的将来应该可以实现。
来源:⽹络。
超全机械原理动图解析,让你一次看明白

超全机械原理动图解析,让你一次看明白1.棘轮机构1将驱动轴的连续旋转直接转换成驱动轴的间断性旋转的设备。
2.棘轮机构2此机制直接将驱动轴的连续旋转转换成驱动轴的间断性旋转。
通过下移蓝色棘爪无需改变输入的运动方向即可改变被驱动轴的运动方向。
3.钣金棘轮传动11)适用于轻负载2)低成本3)适用于大规模生产4)棘爪与棘轮的永久性接触由棘爪的重量维持4.钣金棘轮传动21)适用于轻负载2)低成本3)适用于大规模生产4)棘爪与棘轮的永久性接触由棘爪的重量维持5.棘轮机构3通过调整粉色后盖的位置可以得到绿色轮的不同旋转角度。
拉动橙色棘爪并使其旋转180°可以改变绿色轮的旋转方向。
此机制用于成形器。
6.棘轮机构4棘轮有内齿。
7.棘轮机构5自行车自由轮。
蓝色链轮从脚踏自行车接收运动。
黄色轮毂仅在蓝色链轮顺时针旋转时旋转。
黄色轮毂顺时针旋转对蓝色链轮没有影响。
由于弹簧的作用,红色棘爪总是压向链轮的内齿。
现实中使用了两个棘爪。
8.棘轮机构8绿色输入圆盘通过蓝色棘爪使得输出棘轮间断性旋转。
粉色和黄色销控制棘轮的停止时间。
每一个销使得棘轮在输入圆盘旋转1/8周期间停止。
由于弹簧(未显示)的作用,蓝色棘爪总是压向棘轮齿。
9.棘轮机构9有两个棘爪。
粉色棘爪推动棘轮。
绿色棘爪在粉色棘爪反向运动时维持棘轮静止。
10.棘轮机构12有两个棘爪。
绿色棘爪推动粉色齿轮,且不是一直与其接触(不同于普通棘轮机构)。
蓝色棘爪在绿色棘爪不推动齿轮时维持棘轮静止。
11.销齿轮棘轮机构1输入:粉色曲柄持续性旋转输出:黄色销齿轮12.棘轮机构13黄色输入圆盘通过橙色棘爪使得绿色输出棘轮间断性旋转。
蓝色凸轮的长度调节棘轮的运动时间。
13.棘轮机构15有两个棘爪。
粉色棘爪推动棘轮。
绿色棘爪在粉色棘爪反向时维持棘轮静止。
黄色凹槽凸轮为输入。
14.棘轮机构16输入:粉色曲柄的持续性恒速旋转。
15.棘轮机构31输入:绿色曲柄震荡输出:棘轮间断性旋转特点:内齿棘轮、外棘爪16.棘轮机构17输入:绿色偏心轴输出:灰色棘轮重力维持棘爪和棘轮的接触。
动画机械原理图整理(已打包提供下载)
动画机械原理图整理(已打包提供下载)先打包提供下载(包里面可能还比较乱,没有好好整理呢),最近有些事情,估计要停一段时间再收集了,也会慢慢的尝试补一些说明,看看最终能能整理成什么样子。
太大了传不上来传到115了地址/file/bh5evs13#动画版机械原理图整理.rar四楼更新一些,有些还没搞懂具体的专业名称,分类还不是很准,搞明白了会在调,也希望专业人士看到的话指点下(不知道你们卡不卡,第一页这么多图我有时候打开来已经很卡了,考虑在后面更新)六楼还有,一楼太多编辑起来吃力了首先感谢各位朋友的回复和支持!有朋友问到打包下载的问题,其实这个帖子是因为我在超大浏览到了一个舰炮装填系统原理图而开始收集整理的,目前我还在努力寻找和收集中,等到我把自己的收集潜力发掘光后会把我收集的图片、Flash等打包找个地方供大家下载。
同时也希望朋友看到这样的图片也发在这里,共同收集提供给对这些感兴趣的朋友们。
1.斯特林发动机2.二冲程发动机3.四冲程发动机4.水平对置式发动机5.v型发动机6.星形发动机7.奎西发动机8.转子发动机8.双涵道涡轮风扇发动机9.喷气发动机10.马耳他十字机芯11.蒸汽机12.汽车变速器(手动5档)13.汽车万向节14.手枪15.飞机机枪16.弹药装舰炮填系统17.缝纫机18.椭圆规19.绳扣20.螺旋机构动画21.差动螺旋机构动画22.减速器分解23.内燃机冲程24.深沟球轴承动画25.十字连轴器26.水环式真空泵工作原理27.梯形机构在转向上28.凸轮连杆机构29.圆柱斜齿轮30.圆锥破碎机工作原理31.直列式发动机——它的汽缸肩并肩地排成一排,L4发动机,一般的车都用,也有L6,比如宝马6,L3,比如奥拓32.直线轴承动画33.气动阀门定位器工作原理动态模拟34.三相定子绕组励磁、绕组、旋转磁场。
最新机械原理动态图,最后一张的单车真拉风啊!

最新机械原理动态图,最后一张的单车真拉风啊!
动态原理图能够直观的看清机械作业的过程和原理,一直备受大家关注,今天的动图比较直观,看不懂的罚做俯卧撑就算了吧,就罚乘骑最后一个交通工具上班好不好。
1.阀门动态图
2.链传动
3.卡盘工作原理
4.塔吊长高过程
5.Thordon COMPAC船尾轴管轴承工作原理
6.古老的水泵工作原理
7.卧螺离心机
8.旋转凸轮泵
9.滑块运动
10.螺杆运动
11.差速器工作原理
12.Bourke 发动机
13.轴流式压缩机
14.蠕动泵的工作原理
15.上班交通工具,比慢还有比它更慢的吗
•自行车。
高级机械原理——全动画图解

03
高级机械原理基础知识
机构学基础
机构学定义:研究机械系统中机构的结构、运动和力的学科 机构分类:按照运动形式、结构形式、功能等分类 机构组成:由构件、运动副和运动链等组成 机构运动学:研究机构的运动规律和几何关系
运动学基础
定义:研究物体运动的几何性质和运动方程的数学分支 分类:根据物体所受外力情况可分为匀速运动和变速运动 运动方程:描述物体运动轨迹的数学表达式 运动学与实际应用:在机械设计、制造、控制等领域有广泛应用
自由振动:物体 在阻尼作用下的 振动其振幅随时 间衰减。
受迫振动:物体 在外力作用下产 生的振动其频率 与外力频率相同 或相近。
04
高级机械原理核心内容
机构分析方法
运动学分析:研究机构的位置、 速度和加速度
动力学分析:研究机构的动力 学特性包括力、力矩和运动方 程
静态分析:研究机构的平衡状 态和静力特性
医疗器械:利用高级机械原理制 造精密医疗设备提高医疗诊断和 治疗的准确性和安全性。
添加标题
添加标题
添加标题
添加标题
航空航天器:通过精密机械结构 实现高精度导航和控制保证航天 器的安全和可靠性。
智能机器人:通过精密机械臂实 现高精度操作和复杂动作提高机 器人的智能化水平和应用范围。
感谢观看
汇报人:
单击此处添加副标题
高级机械原理全动画图解
汇报人:
目录
01 02 03 04 05 06
添加目录项标题 高级机械原理概述 高级机械原理基础知识 高级机械原理核心内容 高级机械原理全动画图解实例 高级机械原理应用案例分析
01
添加目录项标题
02
高级机械原理概述
机械原理的定义和重要性