液压支架四连杆机构的三维建模和运动仿真
关于液压支架四连杆建模及设计方案
四连杆机构的建模及优化设计关键词:四连杆,SolidWorks,COSMOSMotion,运动仿真FOUR-BARLINKAGEDESIGNOFTHEMODELINGANDOPTIMIZATIONABSTRACTFour-link is the shield support bracket and support shield one of the most important components, its role can be summarized as two. First, when the support changes from high to low, with four-bar linkage so that the front support beam trajectory point approximation lemniscates. So that the front support beam points away from the wall of the changes with the coal greatly reduced, improving the management performance of the roof。
Second, the level of support to withstand greater force. This article is to discuss four hydraulic linkage mechanisms.In the article, we study the four-bar linkage hydraulic problems, and can be considered from several aspects of the solution. This paper studies the four hydraulic linkage, hydraulic four-bar linkage is mine machinery - the key hydraulic components. Article on the four-bar linkage and hydraulic support the overall studied.Paper also the dynamic characteristics of four-bar linkage analysis, in the process of the Application of the SolidWorks COSMOSMotion in modeling and motion simulation.KEYWARDS:Four-link,SolidWorks,COSMOSMotion, motion simulation.目录摘要IABSTRACTII1.1引言11.2 SolidWorks软件简介11.2.1 SolidWorks功能描述11.2.2 CAD技术概述31.2.3 CAD系统41.2.4 CAD技术的应用41.2.5 COSMOSmotion简介62四连杆机构建模72.1四连杆机构的作用72.2四连杆机构的几何作图法82.3 四连杆机构优选方法122.3.1 目标函索的确定122.3.2 四连杆机构的几何特征122.4运用SolidWorks建立四连杆机构模型122.5 本章小结153 对四连杆机构进行COSMOSMotion运动分析163.1COSMOSMotion软件的应用163.2四连杆机构的运动仿真过程173.2.1选择马达和设置马达参数183.2.2仿真机构的运动设置193.2.3 仿真机构的参数设置193.3 仿真数据处理20结论33参考文献34致谢351绪论1.1引言液压传动时一项新兴技术,他被引用到工业领域只有很短的时间,液压支架已广泛应用于我国煤矿井下支护,它具有初撑力大、恒阻、安全和高效等特性,是适合我国国情的一种有效的工作面支护设备。
液压支架三维造型设计与运动仿真

基于Pro/E的液压支架三维造型设计与运动仿真作者姓名:任客菲专业班级:机械工程及自动化机械三班指导教师:张静摘要采煤综合机械化,是加速我国煤炭工业发展,大幅度提高劳动生产率,实现煤炭工业现代化的一项战略措施。
综合机械化不仅产量大,效率高,成本低,而且能减轻笨重的体力劳动,改善作业环境,是煤炭工业技术的发展方向。
液压支架是综合机械化采煤方法中最重要的设备之一。
首先,通过对液压支架的相关资料收集,整理;了解液压支架的结构,类型,工作原理,特点,目的及要求;其次,对支撑掩护式液压支架结构作了设计,受力分析以及强度校核;再次,利用三维软件Pro/E进行三维建模,并且根据运动关系将各个部件在Pro/E中装配起来。
;最后,进行运动仿真,保存运动仿真结果,用于运动分析。
关键词:液压支架四连杆机构底座ABSTRCTThe comprehensive mechanization of coal mining is a strategic measure to the acceleration coal industrial development of our country , raise labor productivity substantially , realize the modern of coal industry. Synthesize mechanization not only output big, efficiency has low cost high and can alleviate heavy physical labor and improvement schoolwork environment, is the technology of coal industry develop direction. Hydraulic support is the one of comprehensive most important equipment in the mechanization method of coal mining.First, the correlation of the hydraulic support data collection, collation, understanding of the structure of hydraulic support, types, working principle, characteristics, objectives and requirements;Second, support for structural support made the cover of hydraulic design and strength check;Again using three-dimensional software Pro / E three-dimensional modeling, and based on movement between the various parts in Pro / E in the assembly together. ;Finally, simulation animation production, preservation movement simulation results for motion analysis.Keywords: hydraulic support 4 linkage mechanisms base目录第1章前言 (1)1.1本课题研究的目的与意义 (1)1.2国内外液压支架的研究现状及发展 (1)1.3本课题研究的内容 (3)第2章液压支架结构设计 (4)2.1液压支架工作原理 (4)2.2支架结构及其作用 (6)2.2.1 顶梁 (6)2.2.2 掩护梁 (6)2.2.3 底座 (7)2.2.4 前后连杆 (7)第3章液压支架强度校核 (9)3.1支架的工作状态 (9)3.2液压支架的架型特点 (9)3.3液压支架载荷的确定 (10)3.4各部件受力分析及强度校核 (10)3.4.1 参数对支架性能的影响 (12)3.4.2 支架工作阻力计算 (15)3.4.3 前后连杆受力 (16)3.4.4 底座强度计算 (16)3.4.5 推移千斤顶强度计算 (19)3.4.6 顶梁载荷分布 (21)3.4.7 底座接触比压 (23)3.4.8 支架受力影响因素 (23)3.5强度条件 (24)第4章液压支架三维建模与运动仿真 (26)4.1三维建模及装配 (26)4.1.1液压支架零件建模 (26)4.1.2液压支架装配 (28)4.2运动仿真 (30)4.3运动分析 (32)结论 (35)致谢 (36)第1章前言1.1本课题研究的目的与意义众所周知煤炭是我们的主要能源之一,少了煤炭人类的生产,生活将出现问题,所以对煤矿开采配套设备的研究显得尤为重要。
液压支架四连杆机构设计及运动学分析
01 引言
03 参考内容
目录
02 机构设计
引言
液压支架是煤矿井下综采工作面的重要设备之一,用于支撑顶板和护帮,以 保证作业安全。四连杆机构是液压支架的重要组成部分,对支架的支撑力和稳定 性有着重要影响。本次演示将介绍液压支架四连杆机构的设计及运动学分析,旨 在为优化支架性能提供理论支持。
在仿生机器人的研究领域中,四足仿生马机器人是一种非常经典的案例。四 足动物,尤其是马,具有非常优异的运动性能和适应能力,因此模仿其运动特征 的机器人具有广泛的应用前景。本次演示将介绍一种凸轮连杆组合机构驱动的四 足仿生马机器人的构型设计与运动学建模分析。
该仿生马机器人主要由凸轮连杆组合机构、驱动装置和四肢关节等组成。其 中,凸轮连杆组合机构是机器人的核心组成部分,其作用是模拟马腿部的运动特 征,包括马腿的伸展和收缩。驱动装置则是控制凸轮连杆组合机构运动的关键部 件,其作用是提供动力,使机器人可以自主运动。四肢关节则是连接凸轮连杆组 合机构和驱动装置的枢纽,其作用是传递运动和动力。
1、降低摩擦损失:减少活塞、连杆和曲轴之间的摩擦是提高内燃机效率的 重要途径。我们可以采用低摩擦材料和润滑技术来降低摩擦损失。
2、优化结构布局:通过改变活塞、连杆和曲轴的结构布局,可以改善力的 传递路径,提高机构的稳定性和效率。例如,可以改变活塞形状、连杆长度和曲 轴半径等参数来优化结构布局。
3、精确控制燃烧过程:燃烧过程是内燃机工作的核心过程之一。通过精确 控制燃烧过程,可以优化燃烧效率,减少废气排放。例如,可以通过精确控制燃 油喷射、点火时间和进气流量等参数来优化燃烧过程。
4、优化冷却系统:内燃机的冷却系统对于保证其正常运行和延长使用寿命 具有重要意义。通过优化冷却系统的设计,可以降低内燃机的温度,减少热损失, 提高效率。例如,可以通过优化散热器、冷却风扇和循环管道等部件的设计来优 化冷却系统。
液压支架四连杆建模及优化设计
本科毕业设计说明书四连杆机构的建模及优化设计FOUR-BAR LINKAGE DESIGN OF THE MODELING AND OPTIMIZATION学院(部):专业班级:学生姓名:指导教师:2010年 5 月31 日四连杆机构的建模及优化设计摘要四连杆是掩护式支架和支撑掩护式支架的最重要部件之一,其作用概括起来主要有两。
一是当支架由高到低变化时,借助四连杆机构使支架顶梁前端点的运动轨迹近似双纽线。
从而使支架顶梁前端点与煤壁间距离的变化大大减小,提高了管理顶板的性能;二是使支架承受较大的水平力。
这篇文章就是讨论液压支架四连杆机构的。
在文章里,我们研究了液压支架四连杆机构所面临的问题,及可以从几个方面考虑解决的方法。
文章研究的是液压支架四连杆机构,液压支架四连杆机构是矿上机械——液压支架的关键部件。
文章对四连杆机构和液压支架整体进行了研究。
文章还对四连杆机构的动态特性进行分析,在此过程中运用了SolidWorks中的COSMOSMotion进行建模和运动仿真。
关键词:四连杆,SolidWorks,COSMOSMotion,运动仿真FOUR-BAR LINKAGE DESIGN OF THEMODELING AND OPTIMIZATIONABSTRACTFour-link is the shield support bracket and support shield one of the most important components, its role can be summarized as two. First, when the support changes from high to low, with four-bar linkage so that the front support beam trajectory point approximation lemniscates. So that the front support beam points away from the wall of the changes with the coal greatly reduced, improving the management performance of the roof; Second, the level of support to withstand greater force. This article is to discuss four hydraulic linkage mechanisms.In the article, we study the four-bar linkage hydraulic problems, and can be considered from several aspects of the solution. This paper studies the four hydraulic linkage, hydraulic four-bar linkage is mine machinery - the key hydraulic components. Article on the four-bar linkage and hydraulic support the overall studied.Paper also the dynamic characteristics of four-bar linkage analysis, in the process of the Application of the SolidWorks COSMOSMotion in modeling and motion simulation.KEYWARDS:Four-link, SolidWorks, COSMOSMotion, motion simulation.。
放顶煤液压支架进行三维建模与运动仿真分析毕业设计
放顶煤液压支架进行三维建模与运动仿真分析毕业设计第1章绪论1.1 本课题的研究目的和意义课题提出:目前,许多国内外的大型辅助设计软件都包含了机械虚拟装配和运动仿真的模块,如国外PTC公司的Pro/ENGINEER,EDS的UG,SDRC的I - DEAS,MATRA的EUCLID和国内的CAXA等。
这些软件都给设计人员提供了更完善的机械设计途径。
本文主要基于美国PTC 公司的Pro/ ENGINEER WILDFIRE软件,对ZF3700/16/26型放顶煤液压支架进行三维建模与运动仿真分析。
目的和意义:1、采煤综合机械化,是加速我国煤炭工业发展,大幅度提高劳动生产率,实现煤炭工业现代化的一项战略措施。
综合机械化不仅产量大,效率高,成本低,而且能减轻笨重的体力劳动,改善作业环境,是煤炭工业技术的发展方向。
液压支架是综合机械化采煤方法中最重要的设备之一,加大对液压支架的设计与研究力度,对实现我国煤炭工业高产高效科学发展具有重要意义。
2、随着全球经济的一体化,工程机械产品市场的竞争日益激烈。
为了提高市场竞争力,各企业必须不断缩短新产品的研发周期,提高产品质量、性能,降低开发成本。
在这种需求下,以虚拟现实技术为代表的计算机技术不断发展,使虚拟设计逐步成为工程领域一种新的现代化设计手段。
运用虚拟设计的方法,可以在产品设计初期,设计、分析和评估产品的性能,确定和优化物理样机参数,从而降低新产品的开发风险,缩短开发周期,提高产品性能。
Pro/E软件是目前国内外最为先进的基于特征的三维参数化设计系统之一,易学易用、功能强大。
利用Pro/E软件实现放顶煤液压支架的三维参数化造型与运动仿真,简捷方便、形象直观、效果逼真,能显著提高提高液压支架的设计效率、降低研发周期。
1.2 相关技术研究现状1.2.1 放顶煤液压支架的技术现状(1)支架设计随着计算机技术的发展和应用,支架CAD理论的发展已相对成熟,借助Pro/ ENGINEER或其他实体设计软件,可以实现支架的总体设计、部件设计及零件设计,并可根据参数变化,实现总装图、部件图和零件图的自动生成、打印;为了验证支架结构设计的合理性,可进行支架的运动模拟分析,实现支架的可视化。
液压支架四连杆建模及优化设计方案资料
四连杆机构的建模及优化设计四连杆机构的建模及优化设计摘要四连杆是掩护式支架和支撑掩护式支架的最重要部件之一,其作用概括起来主要有两。
一是当支架由高到低变化时,借助四连杆机构使支架顶梁前端点的运动轨迹近似双纽线。
从而使支架顶梁前端点与煤壁间距离的变化大大减小,提高了管理顶板的性能;二是使支架承受较大的水平力。
这篇文章就是讨论液压支架四连杆机构的。
在文章里,我们研究了液压支架四连杆机构所面临的问题,及可以从几个方面考虑解决的方法。
文章研究的是液压支架四连杆机构,液压支架四连杆机构是矿上机械——液压支架的关键部件。
文章对四连杆机构和液压支架整体进行了研究。
文章还对四连杆机构的动态特性进行分析,在此过程中运用了SolidWorks中的COSMOSMotion 进行建模和运动仿真。
关键词:四连杆,SolidWorks,COSMOSMotion,运动仿真FOUR-BARLINKAGEDESIGNOFTHEMODELINGANDOPTIMIZATIONABSTRACTFour-link is the shield support bracket and support shield one of the most important components, its role can be summarized as two. First, when the support changes from high to low, with four-bar linkage so that the front support beam trajectory point approximation lemniscates. So that the front support beam points away from the wall of the changes with the coal greatly reduced, improving the management performance of the roof。
基于SolidWorks的液压支架三维建模和运动仿真

计算机应用 基于S olidW orks 的液压支架三维建模和运动仿真蔡文书,程志红,沈春丰(中国矿业大学,江苏徐州221008)摘要:基于S olidW orks 三维建模软件的功能和特点研究了ZF720放顶煤液压支架的三维建模与运动仿真的方法和应注意的问题。
通过建模和运动仿真,达到优化液压支架设计的目的。
关键词:液压支架;三维建模;运动仿真中图分类号:T D35514;TP31 文献标志码:A 文章编号:100320794(2008)11201652033D Modeling and Dynamic Simulation of H ydraulic Support withS olidw orksCAI Wen -shu ,CHENG Zhi -hong ,SHEN Chun -feng (China University of M ining and T echnology ,Xuzhou 221008,China )Abstract :The function and characteristic of 3D m odeling s oftwares S olidW orks are introduced.Based on S olid 2W orks ,the way and issues of 3D m odeling and dynamic simulation of hydraulic support are studied.Through 3D m odeling and dynamic simulation ,the design of hydraulic support is optimized.K ey w ords :hydraulic support ;three -dimension m odeling ;dynamic simulation0 前言液压支架是煤矿生产的主要设备,其主要部件况通过控制系统的控制信号传递给远程控制大厅。
液压支架四连杆机构运动分析和优化设计
液压支架四连杆机构的运动分析和优化设计刘刚(河北天择重型机械有限公司,河北邯郸 056200)摘要:利用SolidWorks实现了液压支架二维模型的建立,分析了四连杆机构的运动规律,得到了顶梁前端准确的运动轨迹,并且对四连杆机构进行了优化设计,为液压支架的设计制作提供了方法和经验。
关键词:液压支架;四连杆机构;优化设计kinematics analysis and optimization design of HydraulicSupport’four-bar linkageLIU Gang(Hebei Tianze Heavy Machinery Co.,Ltd.,Handan 056200,China)Abstract:Drew planar models of hydraulic support based on SolidWorks, analyzed kinematics regulation of the four-bar linkage, get accurate kinematics track of canopy,and optimized four-bar linkage,provided the method and experiences for design and manufacture of hydraulic support.Key words: hydraulic support;four-bar linkage;optimization design0 引言液压支架不仅可以维护顶板和工作空间,而且能够推动工作面移动,是煤矿综采工作面的核心设备。
现在普遍采用四连杆机构作为顶梁的稳定机构,经过长期的实践使用,取得了巨大的经济效益,彻底解决了支撑式液压支架稳定性差的问题。
四连杆机构是液压支架最重要的连接部件,它控制顶梁沿近似双纽线的轨迹运动,大大缩小梁端距的变化量,提高了顶板管理性能。
基于Pro_E的液压支架三维实体建模与运动仿真
3D Parameter Solid Modeling and Simulation of Hydraulic Support with Pro E
MA Xi- qing1 , JIAO Guang- yin2, LI Qiu- sheng1, MA Yue- jun1 ( 1. Hebei University of Eng ineering, Handan 056038, China;
74
第 28 卷第 1 期 基于 Pro E 的液压支架三维实体建模与运动仿真
不同。只有当被装配件处于完全约束时, 被装配件 才可能具有确定的运动, 联接!才会有效。
完成支架所有部件的装配后, 进行干涉检查, 确 认无误后, 保存文件。完成装配的 ZF24 17 2000B 放 顶煤液压支架三维实体模型如图 4 所示。
在对液压支架某部件的结构形状进行正确分析 的基础上, 将复杂的部件分解为若干个简单构件, 如 肋板、弯板或圆管等, 并分析它们的形状、位置及相 互关系。在不影响实质问题的情况下, 为了简化建 模, 均舍去了部件中的焊缝、螺纹、管线等细部结构, 以提高系统的处理速度。
图 1 底座
根据构件的形状和尺寸, 在 Pro E 软件的 零件 模块中利用拉伸、旋转、扫描等特征创建方式建立各 个构件。在建模过程中, 一定要充分利用各构件之 间的位置关系和连接关系, 选择合适的草绘平面、参 照平面及特征的生成方式, 即通过合理地设定各构 件间的父子关系, 以尽量减少部件上的定位尺寸, 方 便特征的修改和重定义, 提高设计效率。
参考文献: [ 1] 李富柱. 矿用防爆装载机工作装置虚拟样机研究[ D] . 2005.
[ 2] 刘小平, 郑建荣, 等. 虚拟样机及其相关研究和实践[ J] . 机械科 学 与技术, 2003( 11) : 235- 238.
液压支架的三维建模及运动分析
连 杆 , 连 杆 , 梁 之 间 共 添 加 七 个 转 动 后 顶
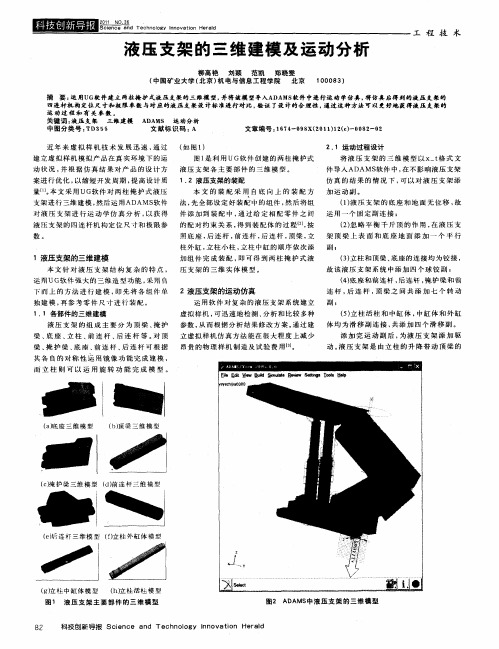
运 用 软 件 对 复 杂 的 液 压 支 架 系 统 建 立 副 ; 虚 拟 样 机 , 迅 速 地 检 测 、 析 和 比 较 多 种 可 分 ( ) 柱 活 柱 和 中缸 体 , 5立 中缸 体 和 外 缸 添 加 完 运 动 副 后 , 液 压 支 架 添 加 驱 为 动 。 压 支 架 是 由立 柱 的 升 降 带 动 顶 梁 的 液
近 年 来 虚 拟 样 机 技 术 发 展 迅 速 , 过 ( 图 1 通 如 ) 建 立 虚 拟 样 机 模 拟 产 品 在 真 实 环 境 下 的运
图 l 利 用 UG软 件 创 建 的 两 柱 掩 护 式 是
将 液 压 支 架 的 三 维 模 型 以 x t 式 文 —格 件 导 入 AD AMS 件 中 , 不 影 响液 压 支架 软 在 仿 真 的 结 果 的 情 况 下 , 以 对 液 压 支 架 添 可
Q: 韭
Sc en a Techn O I ovaton i ee nd Ol gy nn i He al r d
工 程 技 术
液 压 支 架 的 三维 建 模 及 运 动 分 析
柳高艳 刘颖 范凯 郑晓 雯 ( 中国矿 业大 学 ( 京 ) 电 与信息 工程 学 院 北 机 北 京 1 0 8 ) 0 3 0
数。
( ) 略 平 衡 千 斤 顶 的 作 用 , 液 压 支 2忽 在
照底座 , 连杆 , 连杆 , 连杆 , 梁 , 后 前 后 顶 立 架 顶 梁 上 表 面 和 底 座 地 面 添 加 一 个 平 行
柱 外 缸 , 柱 小 柱 , 柱 中缸 的 顺 序 依 次 添 副 ; 立 立
液压支架在Solidworks平台上的运动仿真分析
液压支架在Solidworks平台上的运动仿真分析摘要三维设计软件不仅能够进行结构设计,更能够对设计进行检测、分析,能够及时有效的发现设计的干涉,有效性等等。
Solidworks软件是一款非常优秀的三维设计软件,能够满足大多数的设计需求。
Solidworks中的运动仿真模块COSMOS motion,能够对设计的产品进行虚拟环境下的仿真。
通过仿真能够模拟设计产品的运动,以及在运动中的受力情况,在设计产品的时候就了解产品的动力学特性,从而为产品的有效性和合理性进行检测,也对产品的再开发提供了基础。
本文通过对一种液压支架的运动仿真分析,探索了一种分析的思路和步骤,为以后的工作提供方便。
关键词产品设计;Solidworks;运动仿真;动力学特性1建立液压支架的三维模型三维模型设计在机械设计领域已经慢慢的普遍开来,但是大多数还仅仅停留于表面的机械结构的设计,并不能充分的利用三维设计软件的作用。
Solidworks 是一款强大的机械行业三维模型设计软件,不仅具有强大的三维建模、曲面设计、管道布置、虚拟装配、产品分析功能,还能够对设计的产品进行动力学仿真和有限元受力分析,大大的提高了设计的可能性。
Solidworks软件中的COSMOS motion模块能够十分准确的进行动力学仿真,能够在实际生产之前就达到产品的运动情况。
液压支架液压支架是煤矿综合机械化开采的重要装备,在井下采煤工作面能够有效地支撑和控制工作面顶板,保证工人、机器的安全工作空间。
液压支架的主要是由顶梁、底座、掩护梁、前后连杆、立柱以及各个千斤顶等组成。
本文研究的液压支架型号是ZF15000/28/52型放顶煤液压支架,分别对液压支架的各个部分进行1:1建模之后三维模型如图1所示。
本文中的模型建模过程采用的是较为普遍的bottom-up建模顺序,思路明确,条理清晰。
建模的操作非本文重点,不再赘述。
2对模型进行优化对于一个庞大的系统,如果对其所有的部分全都应用仿真分析,是十分不明智的。
液压支架三维建模与运动仿真.

液压支架三维建模与运动仿真0、引言随着科技的发展,单一使用二维CAD技术进行液压支架设计已不能满足现代设计的需求。
在科研人员到各煤矿和生产厂家进行方案汇报、项目招标的过程中,利用Solid Edge软件建立的支架三维实体模型和运动仿真分析,将支架的每一个部件结构,每一层装配关系,各种运动轨迹都清晰、直观的显示出来,从视觉上带给客户更感性的认识,收到了很好的效果。
1、支架三维实体建模软件的选用现阶段比较有代表性、应用广泛的三维CAD软件有:美国PTC公司的Pro/E、DRC公司的I-DEAS、SolidWorks公司的SolidWorks、EDS公司的Solid Edge、北航海尔的CAXA。
其中Solid Edge是Windows平台下基于特征的参数化造型技术和变量化造型技术的三维实体造型系统,具有杰出的机械装配设计和制图性能,能够方便地与Windows平台下其它应用软件进行数据转换和链接操作。
Solid Edge强大的建模功能可以完成任何复杂的造型设计和装配设计,其工程图模块可以将零件环境、装配环境中生成的各类零件、装配件等实体进行投影,生成符合制图标准的二维工程图,极大地方便了液压支架零部件的设计,因此确定采用Solid Edge软件来进行液压支架三维实体的建模。
2、支架部件三维实体模型的建立液压支架三维实体模型的建立应采用自上而下的方法,即先在Solid Edge软件的零件环境中通过特征造型来生成支架的所有部件模型,然后在装配环境中按装配关系逐个进行支架部件的装配。
这种建模方法的优点是:支架各部件模型的设计是独立的,其重建、修改方法很简单,与其它部件不存在相互关联。
特征是几何体的参数化表示。
创建支架部件三维实体模型,首先需要创建部件的特征。
在Solid Edge软件的零件模块中,特征命令非常多,通过特征操作简单灵活,同时便于修改,可以生成任何复杂的零件。
第一个创建的特征称为基础特征,只能用拉伸命令来创建。
液压支架四连杆机构的三维建模和运动仿真

液压支架四连杆机构的三维建模和运动仿真摘要:利用UG的建模模块(model)对液压支架四连杆机构进行快速整体建模,然后应用UG的运动仿真模块(animation)对支架升架、降架的运动过程进行模拟分析,同时利用标记点对顶梁端点的运动轨迹进行跟踪,来验证端点最大水平变动量是否满足设计要求。
关键词:液压支架;四连杆机构;三维建模;运动仿真0引言三维建模彻底改变了传统设计理念,使设计者头脑中产生的三维实体图形可以直接仿真到屏幕上,既形象又直观。
使设计人员从想象各种视图的困境中解放出来,对于复杂的模型更可避免传统设计方式难以避免的错误。
而在建造物理样机之前,通过建立的三维数字化模型进行运动仿真可以对运动特性及干涉情况进行检验,从而预知设计的机构是否满足要求。
本文以ZTA6500型液压支架为例,应用UG软件探索一种三维整体简化、快速建模和运动仿真的方法。
1UG软件简介Unigraphics(简称UG)是美UGS公司的拳头产品。
该软件不仅具有强大的实体模型、曲面造型、虚拟装配和产生工程图等设计功能,而且在设计过程中可以进行有限元分析、机构运动分析、动力学分析和仿真模拟,从而提高设计的可靠性。
同时可用建立的三维模型直接生成数控代码,用于产品的加工,其后处理程序支持多种类型数控机床。
另外它所提供的二次开发语言UG/open GRIP,UG/open API简单易学,实现功能多,便于用户开发专用CAD系统。
2液压支架及其四连杆机构液压支架的主要功能是支撑工作面顶板,阻止顶板冒落的岩石窜入作业空间,以保证工作面内机器和人员的安全生产。
由于其工作性质所致,较为关心的是端面距的尺寸,而梁端摆动幅度会对端面距的尺寸造成直接影响。
液压支架四连杆机构的设计是掩护式和支撑掩护式液压支架整体设计的核心和基础,四连杆机构是由顶梁,掩护梁,前、后连杆和底座五大构件组成。
四连杆机构的主要作用是保证支架的纵向和横向稳定性,承受和传递外载,并能够实现移架,设计的好坏决定着顶梁端点的运动轨迹。
液压支架的三维建模及整架有限元分析
液压支架的三维建模及整架有限元分析摘要:利用Pro/E软件建立ZY6000/25/50型两柱掩护式液压支架的三维模型,并把模型导入有限元软件ABAQUS中进行分析,得出在顶梁偏载、底座扭转工况下支架的应力和位移分布情况,研究的结果可以为液压支架的设计和结构优化提供参考依据。
关键词:液压支架三维建模有限元分析强度分析液压支架是综合机械化回采工作面的支护设备,起支撑和保护的作用。
液压支架的寿命和质量,与它在承载情况下的应力应变有很大的关系。
在传统的液压支架设计过程中,一般是制造出一台样机,在反复的试验中得到液压支架各部位的应力应变的分布情况,但是这种结果误差比较大。
本文采用Pro/E软件建立液压支架的三维模型,将模型导入到ABAQUS软件进行有限元分析,能够更好地模拟各种工况,得到支架在各种工况下的应力应变情况,大大缩短了支架的设计周期,节省了液压支架的设计成本。
1 液压支架的三维建模1.1 液压支架的简化在建模过程中,考虑到有限元分析过程中的网格划分、相互作用的设定和载荷的加载,要对液压支架进行简化。
因为立柱和千斤顶与支架的接触比较复杂,在建模过程中进行简化处理,用载荷代替。
为节省建模时间,对顶梁、掩护梁和底座上的小孔和对支架受力影响不大的小块或小环进行简化处理。
支架模型中不能出现小边或小缝,否则会影响后续有限元分析中的网格划分,影响到支架应力应变的分析结果,所以对这些小边或小缝也要进行简化处理。
1.2 液压支架各部构件的建模液压支架包括顶梁、掩护梁、前后连杆、底座这几部分,分别对其进行建模。
在建模过程中,前后连杆和底座是关于中心对称的,因此在拉伸和旋转过程中,充分利用软件中的镜像模块,可以大大缩短建模时间,提高支架的建模效率。
支架各部分建模如图2所示。
1.3 液压支架的装配在Pro/E中对完成建模的支架各构件进行装配。
装配过程中,构件与构件之间的间隙尺寸为5mm,构件与构件之间的连接设置为铰接。
第1讲四连杆机构运动仿真

第1讲四连杆机构运动仿真一、建立连接1.设置工作目录选择【文件】→【设置工作目录】打开工作目录选取面板,如图1所示,选择如图所示2的文件夹为工作目录。
图1设置工作目录图2 选择文件夹2.建立新的装配文件打开PROE软件,点击'文件',选择‘新建’,有如下对话框弹出(如图3所示),在类型项选择‘组件’,子类型项选择‘设计’,名称改为‘2009109120’,不使用缺省模板,点击‘确定’。
有下对话框弹出(如图4所示),在模板中选择‘mmns -asm -design’,直接点击‘确定’开始进入制图过程。
图3 新建组件图4 选择单位二、装配文件1.机架的放置(1)进入PROE的主界面,点击右下角图标‘’,有如下对话框弹出(如图5所示),选择运动仿真四连杆中1ground.prt,单击打开。
图5 载入文件在主界面出现一行任务栏,在‘自动’选项中选择,再在右边单击‘’,如图6所示。
图6 机架1(2)再点击右下角图标‘’,选择运动仿真四连杆中1-ground-prt,单击‘打开’,则在主界面中出现一行任务栏,如图7所示。
图7 机架2用鼠标左键选择两平面对齐,如图8所示。
图8 平面对齐在选择两侧面对齐,在任务栏中选择,如图9所示,再单击右边''。
图9 侧面对齐2.曲柄的装配在单击右下角‘’,在运动仿真四连杆中选择‘2-crank-prt',单击‘打开’。
在主界面出现一行任务栏:,在用户定义栏中有选择'’,在操作区中选择曲柄的轴线与机座的轴线重合,如图10所示。
图10 曲柄面匹配再选择曲柄与该机座的一端面配对,如图11所示。
在任务栏中点击‘’,和‘’,完成该次联结。
图11 轴对齐3.摇杆的装配单击右下角‘’,运动仿真四连杆中选择‘4rocker-prt’,单击‘打开’。
任务栏:,同理在用户定义中选择‘’把第4摇杆与另一机座的轴线重合连结,如图12所示。
图12 轴对齐再将该摇杆与机座的端面配对连结,如图13所示。
液压支架四连杆机构优化设计及运动仿真

第30卷第5期2009年 5月煤 矿 机 械Coa lM ine M ach i n er yV o.l 30N o .5M ay .2009液压支架四连杆机构优化设计及运动仿真*叶铁丽,李 民,刘欣丽(山东科技大学,山东青岛266510)摘 要:液压支架的性能与其四连杆机构结构参数的设计有密切关系。
以支架升降架时顶梁前端点与煤壁距离的变化量最小为目标,以最小二乘法作为核心算法,通过计算机优选法进行液压支架四连杆机构结构参数的优化设计,并通过ADAM S 仿真软件建立液压支架的简化模型对其进行运动仿真,获得了较理想的结果。
关键词:四连杆机构;优化设计;仿真;最小二乘法中图分类号:TD355 文献标志码:A 文章编号:1003-0794(2009)05-0037-03Opti m al D esign of Four -bar M echanis m i n H ydraulic SupportYE T ie -l,i L IM in ,L IU X i n -li(Shandong Science and T echno l ogy U niversity ,Q i ngdao 266510,China)Abst ract :The perfor m ance of hydraulic po w ered suppo rt is close ly re lated to the design quality of four-bar m echanis m.The opti m al synthesis o f a four-bar m echan is m w as discussed and t h e ob j e ctive is to deter m i n e the opti m al values of the m echan is m li n k leng t h s ,to m ini m ize the variation of the d i s tannce be t w een t h e front-end o f the top bea m and the coa.l The pr ocedure uses the m ethod of least squares as a core algo rithm .A dyna m ic si m u l a ti o n w as m ade i n ADAM S and the resu lt w as re lative ly perfec.t K ey w ords :four-bar m echan is m;opti m a l desi g n ;dyna m ic si m ulation ;least squaresm et h od * 十一五 国家科技支撑计划项目 煤矿复杂条件综采工作面关键设备研究 (2006BAA 11B 05);山东科技大学科学研究 春蕾计划 项目(2008AZZ034)0 引言近年来,随着有限元法、可靠性设计、CAD 理论的发展,工程设计逐步向自动化、集成化、智能化方向发展。
液压支架的三维建模及运动分析
液压支架的三维建模及运动分析作者:柳高艳刘颖范凯郑晓雯来源:《科技创新导报》2011年第36期摘要:运用UG软件建立两柱掩护式液压支架的三维模型,并将该模型导入ADAMS软件中进行运动学仿真,将仿真后得到的液压支架的四连杆机构定位尺寸和极限参数与对应的液压支架设计标准进行对比,验证了设计的合理性,通过这种方法可以更好地获得液压支架的运动过程和有关参数。
关键词:液压支架;三维建模;ADAMS;运动分析中图分类号: TD355 文献标识码:A 文章编号:1674-098X(2011)12(c)-0000-00前言近年来虚拟样机技术发展迅速,通过建立虚拟样机模拟产品在真实环境下的运动状况,并根据仿真结果对产品的设计方案进行优化,以缩短开发周期,提高设计质量[1]。
本文采用UG 软件对两柱掩护式液压支架进行三维建模,然后运用ADAMS软件对液压支架进行运动学仿真分析,以获得液压支架的四连杆机构定位尺寸和极限参数。
1 液压支架的三维建模本文针对液压支架结构复杂的特点,运用UG软件强大的三维造型功能,采用自下而上的方法进行建模,即先将各组件单独建模,再参考零件尺寸进行装配。
1.1 各部件的三维建模液压支架的组成主要分为顶梁、掩护梁、底座、立柱、前连杆、后连杆等。
对顶梁、掩护梁、底座、前连杆、后连杆可根据其各自的对称性运用镜像功能完成建模,而立柱则可以运用旋转功能完成模型。
图1是利用UG软件创建的两柱掩护式液压支架各主要部件的三维模型。
1.2 液压支架的装配本文的装配采用自底向上的装配方法,先全部设定好装配中的组件,然后将组件添加到装配中,通过给定相配零件之间的配对约束关系,得到装配体的过程[2],按照底座,后连杆,前连杆,后连杆,顶梁,立柱外缸,立柱小柱,立柱中缸的顺序依次添加组件完成装配,即可得到两柱掩护式液压支架的三维实体模型。
2 液压支架的运动仿真运用软件对复杂的液压支架系统建立虚拟样机,可迅速地检测、分析和比较多种参数,从而根据分析结果修改方案。
PROE运动仿真基础-四连杆机构

将各个杆件组装在一起,形成 一个完整的四连杆机构模型。
添加运动副和运动驱动
在装配模式下,将四连杆机构添加到 装配文件中。
添加运动驱动,指定运动副的运动方 式和运动参数,如速度和加速度。
选择合适的运动副类型,如旋转副或 移动副,将运动副添加到相应的杆件 上。
设置初始条件和运动参数
01
根据需要设置初始条件,如初始角度或初始位置。
ProE运动仿真基础-四 连杆机构
目 录
• 四连杆机构简介 • Pro/E运动仿真基础 • 四连杆机构在Pro/E中的建模 • 四连杆机构运动仿真分析 • 四连杆机构优化设计 • 案例分析与实践
01
四连杆机构简介
定义与特点
定义
四连杆机构是一种由四个杆件相互连 接而成的机械结构,通过改变杆件的 长度或相对位置,可以实现复杂的运 动轨迹和运动形式。
02
根据实际需求,设置运动参数,如运动时间、运动 轨迹等。
03
运行仿真,观察四连杆机构的运动情况,并调整参 数以优化机构性能。
04
四连杆机构运动仿真分 析
仿真运行与结果查看
01
启动Pro/E软件,打开四连杆机构 模型。
02
在菜单栏中选择“工具”-“机 构”-“仿真”,进入仿真界面。
在仿真界面中设置仿真参数,如 时间、步数等,然后点击“运行 ”按钮开始仿真。
机构的运动特性,如周期性、
死点等。
06
案例二:平面四杆机构的优化设计
总结词:通过Pro/E软件对 平面四杆机构进行优化设计
,提高其运动性能。
建立平面四杆机构的几何模 型。
定义设计变量、约束条件和 目标函数。
详细描述
使用Pro/E的优化工具进行 优化设计。
用CATIA做的四连杆运动仿真
今天我有个同学问我关于CATIA运动仿真的问题,是说如何利用CATIA进行四连杆的运动仿真。
这是一个较为基础的运动仿真,现在我把步骤写下来,以供参考。
第一步,首先要建立四连杆的四根杆的三维模型。
为了方便,就只以平行四边形为例来做。
建立part1,做一个20*10*5mm的长杆,然后长杆上建立两个φ
5*10mm的圆柱以做轴销之用。
如图
接着建立part2,做一个20*10*5mm的长杆,然后在长杆上做两个孔,孔的大小和位置当参考先前做的轴销。
如图
第二步,将part1和part2导入到“装配设计平台”,为四根杆做相关的约束。
采用的约束几乎相同,只用到两种。
一种是“相合约束”,另一种便是“偏移约束”。
这两种约束建立好,如图所示。
第三步,将装配好的四连杆机构导入到“DMU运动结构”平台,在这个平台里添加运动约束。
先将其中的任意一根杆设置为“固定零件”,作为固定架。
将与它连接的任意一根杆作为驱动杆,这是关键步骤。
所采用的运动约束为“旋转结合”,点击这个按钮后会要求提供结合直线与平面。
其中直线是销轴和销
孔的中心线,平面是销轴顶平面以及与杆偏移为0的面。
最重要的是要选择“驱动角度”。
主动杆驱动确定后就是其它定义另外三个运动约束,运动约束添加方法与以上相同,不同的是都不需要选择“驱动角度”,这很重要。
最后,系统会提示可以进行运动仿真。
这是一个基础的运动仿真实例,希望对我的同学有所帮助。
中国机械cad论坛网址/,这里提供了很多学习的资料。
连杆机构
仿真流程
1,打开主模型,进入运动仿真模块并 新建仿真
2,定义连杆 连杆 连杆
连杆 连杆
仿真流程
3,施加运动付
旋转付 4,执行分析及后期处理
固定旋转付
设计步骤
步骤1:打开主模型进入运动仿真,并新建仿真:
设计步骤
步骤2:定义连杆
连杆3
连杆2
连杆1
固定连杆
设计步骤
步骤3:添加运动付
思考: 在哪个旋转付上添加驱动? 为什么?
设计步骤
步骤4:执行分析,关节运动仿真(步长1,步数360)
设计步骤
步骤5:检查运动干涉
设计步骤
步骤5:动画导出
小结
通过本例练习可以具备以下软件使用能力
基础运动副添加
理解固定付的作用 运动机构分析
测量,干涉,跟踪分析等后期处理
通过本例应该掌握以下技能
简单机械运动机构分析方法 简单运动机构运动仿真方法
结束
四连杆机构运动仿真案例
案例:连杆机构
案例背景:
连杆机构是机械设计里面常见的机构形式;
通过这个案例我们将学习如何进行连杆机构的运动仿真及如何分析连杆机构运动规律。
模型文件
案例所要用到知识点:
定义连杆,运动付;
定义运动驱动;
执行分析和后期数据采集;
案例时间
1小时
机构分析:
运动机构分析
本例案例包含了4个组件;
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
液压支架四连杆机构的三维建模和运动仿真摘要:利用UG的建模模块(model)对液压支架四连杆机构进行快速整体建模,然后应用UG的运动仿真模块(animation)对支架升架、降架的运动过程进行模拟分析,同时利用标记点对顶梁端点的运动轨迹进行跟踪,来验证端点最大水平变动量是否满足设计要求。
关键词:液压支架;四连杆机构;三维建模;运动仿真0 引言三维建模彻底改变了传统设计理念,使设计者头脑中产生的三维实体图形可以直接仿真到屏幕上,既形象又直观。
使设计人员从想象各种视图的困境中解放出来,对于复杂的模型更可避免传统设计方式难以避免的错误。
而在建造物理样机之前,通过建立的三维数字化模型进行运动仿真可以对运动特性及干涉情况进行检验,从而预知设计的机构是否满足要求。
本文以ZTA6500型液压支架为例,应用UG软件探索一种三维整体简化、快速建模和运动仿真的方法。
1 UG软件简介Unigraphics(简称UG)是美UGS公司的拳头产品。
该软件不仅具有强大的实体模型、曲面造型、虚拟装配和产生工程图等设计功能,而且在设计过程中可以进行有限元分析、机构运动分析、动力学分析和仿真模拟,从而提高设计的可靠性。
同时可用建立的三维模型直接生成数控代码,用于产品的加工,其后处理程序支持多种类型数控机床。
另外它所提供的二次开发语言UG/open GRIP,UG/open API简单易学,实现功能多,便于用户开发专用CAD系统。
2 液压支架及其四连杆机构液压支架的主要功能是支撑工作面顶板,阻止顶板冒落的岩石窜入作业空间,以保证工作面内机器和人员的安全生产。
由于其工作性质所致,较为关心的是端面距的尺寸,而梁端摆动幅度会对端面距的尺寸造成直接影响。
液压支架四连杆机构的设计是掩护式和支撑掩护式液压支架整体设计的核心和基础,四连杆机构是由顶梁,掩护梁,前、后连杆和底座五大构件组成。
四连杆机构的主要作用是保证支架的纵向和横向稳定性,承受和传递外载,并能够实现移架,设计的好坏决定着顶梁端点的运动轨迹。
顶梁端点运动轨迹成双纽线形,其最大的水平偏摆量应小于或等于70 mm,最好为30 mm以下。
3 液压支架四连杆机构三维实体建模出于理论研究和快速建模的目的,本文将不采用实际的液压支架模型,而是采用其简化的整体建模形式,其简化原则如下:顶梁,前、后连杆,掩护梁和底座分别进行整体建模,而不是由许多小零部件组装成的装配体。
实际的液压支架四连杆机构应该是由钢板焊接成的箱体结构,而本文在创建三维模型时为了快速成型都建成了实体结构。
但四连杆机构各杆长度严格按照图纸的尺寸进行三维建模,其中一些对运动仿真没有直接影响的小部件进行了简化处理,例如:肋板,侧护板等。
在UG的建模(modeling)模块中分别建立顶梁,前、后连杆,掩护梁,立柱和底座整体简化模型,在完成三维模型后,进入装配(assembly)模块完成液压支架整体的虚拟装配。
以ZTA6500型液压支架为例整体建模如图1所示4 液压支架四连杆机构运动仿真液压支架的主要运动形式表现为升架和降架。
本文在对升、降架进行运动仿真的同时,通过在顶梁端点处设置标志点,对顶梁的运动轨迹进行跟踪,跟踪点的坐标值以电子图表的形式输出。
经过处理后,绘制成顶梁端点的运动轨迹图。
运动仿真(Animation)是基于时间的一种运动形式。
即在指定的时间段中运动。
UG的仿真分析依赖于ADAMS解算器,仿真过程分3个阶段进行:前处理(创建连杆、运动副和定义运动驱动);求解(生成内部数据文件);后处理(分析处理数据,并转化成动画、MPEG电影文件、图表和报表文件)。
(1)创建连杆、运动副和定义运动驱动进入UG/motion模块,创建新的运动分析方案(newScenario)。
在此方案中创建四连杆机构的各构件为连杆(links),其中底座设置为整个系统的机架,即为与地固定连杆。
前、后连杆和底座与顶梁的连接处都设置为旋转副(Revolute Joint),4根立柱和液压缸之间的连接设置成滑动副(Slider Joint)。
液压支架运动的驱动力是来自液压缸处的伸缩力,本运动方案中运动驱动设定为加载在立柱上的矢量力(Vector Force)。
(2)设置标记和跟踪选择工具栏上标记图标(makers),在顶梁的端点处设置标记点。
然后选择封装选项(packing op-tions)中的跟踪(trace)功能,通过跟踪选项对话框中的分类选择(class selection)设置标记点为跟踪点。
(3)运动仿真在分析工具条中选择运动仿真图标(Animation)即启动运动仿真过程,在分析选项对话框(AnalysisOptions)中选择机构运动学/机构动力学选项,设时间为5 s,步数为500步,单击OK启动ADAMS解算器进程,分析完成后,运动仿真对话框自动弹出,此时其中的跟踪(Trace)选项为可选项,可以选择全程方式(full Range)来进行运动仿真,即可以观看升、降架的运动过程。
可以把运动仿真的过程制成MPEG电影文件。
标记点的跟踪坐标可以直接以电子图表来表示。
输出的数值经处理后,绘制成图表如图2所示。
由图2可见顶梁端点的运动轨迹的最大水平摆动量在小于70 mm范围内变化。
符合液压支架四连杆机构设计要求。
5 结语(1)以ZTA6500型液压支架为例介绍了支架整体建模的原则和方法,为液压支架快速建模提供了一种思路。
通过设置标记点,对顶梁的端点运动轨迹进行跟踪。
可以在设计阶段检测顶梁端点的最大水平变动量是否在规定的范围内。
为液压支架四连杆机构的设计提供参考依据,从而保证设计的合理性。
(2)利用UG/motion模块可以获得精确的仿真结果。
在进行产品设计或机构开发设计时,应综合应用UG各个模块的优势,把零件建模、装配和运动仿真有机结合起来,发挥软件最大功能。
参考文献:[1]胡小康,陈焱. UG NX2运动分析培训教程[M].北京:清华大学出版社,2005.[2]王国法,等.液压支架技术[M].北京:煤炭工业出版社,1999.[3]丁绍南.采煤工作面液压支架设计[M].北京:世界图书出版社,1992.[4]王国彪,饶明杰.液压支架优化设计与计算机模拟分析[M].北京:机械工业出版社,1994.[5]高悦.综采放顶煤液压支架四连杆机构CAD的研究与开发[D].徐州:中国矿业大学,2002,5.[6]徐新国,梁卫民.液压支架顶梁运动轨迹的计算方法[J].煤矿机电,2004(4):6-8,11.[7]王国彪,高荣.液压支架四连杆机构运动学的优化分析[J].阜新矿业学院学报,1991,10(3):49-53.Three-dimension Model and Dynamic Animation of Four-barMechanism of Hydraulic SupportAbstract:UsingUG/motion rapidlysets up thewhole model ofthe hydraulic support, then simulatingthe risingand declining process with the UG/animation, at the same time to assure whether the maximal horizontal dis-placement movement is accordwith the design requirementor not, utilizingthe markerto trace the end pointofthe roof beam.Key words:hydraulic support; four-bar mechanism; three-dimension model; dynamic animation大采高强力液压支架的参数确定及结构设计摘要:大采高强力液压支架是针对神东煤田浅埋深、薄基岩、厚风积沙等特定地质条件而研制的一种高性能综采液压支架。
本文对该类支架的工作阻力、初撑力、支护高度等主要参数进行了分析计算,并对其主要结构进行了设计。
关键词液压支架工作阻力结构设计1 前言神东煤田煤层埋深浅、基岩薄、上覆厚松散沙层,顶板岩层破断运动具有明显的特殊性,这种类型的浅埋煤田在世界上较为少见,因而对该类型煤层顶板岩层的控制几乎没有可借鉴的成熟理论和适用的支护设备。
从1991年起,神东煤炭公司相继对多个普采工作面和综采工作面进行了矿压观测,研究浅埋深煤层顶板的矿压显现规律,在建立了一整套厚风积沙、浅埋深煤层矿压理论,充分掌握“支架-围岩”相互作用关系后,分别与德国DBT公司和英国JOY公司合作,研制出了适应神东煤田采场矿压特点,满足高产高效型综采工作面煤层顶板支护要求的高性能综采液压支架。
2 支架主要技术参数确定2.1 工作阻力浅埋煤层工作面在初次来压和周期来压期间,顶板结构都将出现滑落失稳,老顶难以形成自身稳定的岩梁结构,支架主要承受结构失稳形成的压力,最危险状态的载荷是“给定失稳载荷”状态。
支架工作阻力根据该矿压理论计算确定。
(1)老顶初次来压期间的支护阻力计算支架必须提供的支护阻力Pm0由直接顶岩柱重量W和老顶结构滑落失稳所传递的压力RD0组成,即Pm0=W+RD0作用于支架的直接顶岩柱重量为W=LkbΣhρg式中 Lk——控顶距长度;b——支架宽度;Σh——直接顶厚度;ρg——岩石视密度。
老顶结构滑落失稳传递压力为RD0≥b(l01ρg+KG0h1l01ρ1g) 0.54 -0.24i- sinθ1式中 KG0——初次来压时载荷传递系数,KG0=l01/(2h1λtanΦ)Kt0;Φ——载荷层内摩擦角;λ——载荷层侧应力系数;Kt0——载荷传递的时间因子;l01——老顶岩块长度;ρg——老顶关键层视密度;h1——载荷层厚度;ρ1g——载荷层平均视密度;θ1——断裂岩块回转角;i——块度(岩块厚度与长度之比)。
所以,初次来压期间控制顶板所需要的支护阻力Pm0≥lkbΣhρg+b(hl01ρg+KG0h1l01ρ1g) [0.54 - 0.24/(i- sinθ1)] (1)(2)老顶周期来压期间的支护阻力计算顶板在"台阶岩梁"结构形式下,支架必须提供的支护阻力Pm由直接顶岩柱重量W和老顶结构滑落失稳所传递的压力RD组成,即Pm=W+RD=LkbΣhρg+RD老顶结构滑落失稳作用到支架上的压力为RD≥bP1(i- sinθ1max+ sinθ1- 0.5)i- 2sinθ1max+ sinθ1式中 P1——老顶关键块载荷。
则周期来压期间控制顶板所需的支护阻力为Pm≥lkbΣhρg+bP1(i- sinθ1max+ sinθ1- 0.5)i- 2sinθ1max+ sinθ1 (2)支护阻力Pm0和Pm是指为了维持工作面顶板稳定,支架必须提供给顶板的有效支撑力,支架工作阻力必须考虑支架的支护效率。