电力电子课程设计-BUCK电路闭环PID控制系统的MATLAB仿真
电力电子课程设计-BUCK电路闭环PID控制系统的MATLAB仿真
电力电子课程设计-BUCK电路闭环PID控制系统的MATLAB仿真CHANGZHOU INSTITUTE OF TECHNOLOGY课程设计说明书课程设计名称:电力电子题目:BUCK电路闭环PID控制系统的MATLAB仿真—15V/5V二级学院(直属学部): 电子信息与电气工程学院专业:电气工程及其自动化班级:07电单学生姓名: 学号:指导教师姓名: 职称:讲师2011 年 1 月电力电子课程设计任务书二级学院(直属学部):电子信息与电气工程学院专业:电气工程及其自动化班级:学生姓名指导教师韩霞职称讲师课题名称 BUCK电路闭环PID控制系统的MATLAB仿真-15V/5V1、根据设计要求计算滤波电感和滤波电容的参数值,设计PID补偿网络2、采用MATLAB中simulink中的simpowersystems模型库搭建闭环降压式变换器的仿真模型3、观察系统在额定负载以及突加、突卸80%额定负载时的输出电压和负载电课流的波形4、撰写课程设计说明书,要求包括:题一、封面二、目录工三、正文1、降压变换器的基本原理作2、BUCK变换器主电路参数设计2.1设计内容及要求内 2.2主电路设计(占空比、滤波电感、滤波电容的设计)3、BUCK变换器闭环PID控制的参数设计容 3.1主电路传函分析3.2补偿环节的设计4、BUCK变换器闭环系统的仿真4.1仿真参数及过程描述4.2仿真模型图及仿真结果5、总结(含心得体会)6、参考文献(不少于6篇)21、输入直流电压(V):15V IN2、输出电压(Vo):5V3、输出电流(I):10A N指标4、输出电压纹波峰-峰值 Vpp?50mV)5、锯齿波幅值Um=1.5V 目标6、开关频率(fs):100kHZ )要7、采样网络传函H(s)=0.3 求8、BUCK主电路二极管的通态压降V=0.5V,电感中的电阻压降V=0.1V,开DL关管导通压降V=0.5V,滤波电容C与电解电容R的乘积为75uΩ*F ONC第1天阅读课程设计指导书,熟悉设计要求和设计方法第2天根据设计原理计算相关主要元件参数以及完成PID系统的设计进第3天熟悉MATLAB仿真软件的使用,构建系统仿真模型程安第4天仿真调试,记录要求测量波形排第5天撰写课程设计说明书1、电力电子课程设计任务书本院编2、电力电子课程设计指导书本院编3、王创社,乐开端等,开关电源两种控制模式的分析与比较,电力电子技术,1998,3,78一81; 主4、徐辅东,电流型控制开关变换器的研究与优化,西南交通大学硕士论文,要2000年4月。
BUCK电路的PID控制设计及仿真

BUCK电路的PID控制设计及仿真BUCK电路的PID控制设计⼀、实验⽬的DC/DC 变换器可将不可控的直流输⼊变为可控的直流输出,⼴泛应⽤于可调直流开关电源及直流电机驱动中. Buck 变换器是DC/DC 变换器中最具代表性的拓扑结构之⼀.在⼯程实际中, Buck变换器的控制⽅式可以开环和闭环来实现。
其中闭环控制⽅式⼜可分为PI校正,PID控制,fuzzy控制等⽅式。
本⽂⾸先会建⽴Buck 变换器的模型,然后会分别进⾏开环、PI控制器校正,PID控制器校正,并在MATLAB/SIMULINK上进⾏仿真,最后对得出的结果进⾏⽐较。
⼆、设计内容及要求U):24V( 20%)1、输⼊电压(iU):12V(1%稳定度)2、输出电压(oI):1A3、额定电流(oV≤70mV4、输出电压纹波峰-峰值ppV≤150mV 6、开关5、满载与半载之间的切换时,输出电压纹波峰-峰值pp频率(f):⽆要求,本设计设定为20kHz三、Buck 主拓扑电路3.1开环Buck 电路图图(1)开环Buck 电路3.2 参数计算与选择(1)占空⽐ 50%o i U D U == (2)滤波电感滤波电感的选择与负载电流的变化范围及希望的⼯作状态有关,假设电路要求⼯作在电感电流连续⼯作状态,则临界电感(1)2f o s oD U L I -= 根据公式代⼊计算可得:-4s (1)(10.5)*12 1.5*102f 2*20000o o U D L H I --===此时L 值为电感电流连续与否的临界值,实际电感值可选为(2~3)倍的临界电感。
这⾥L 取4*104H 。
(3)滤波电容电容的容量,会影响输出纹波电压和超调量的⼤⼩。
在开关关断时为负载供电和减⼩输出电压的纹波,滤波电容C 的选择直接关系开关稳压电源输出中纹波电压分量o U ⼤⼩。
滤波电容C2(1)8o o U D C U Lf-= 根据纹波要求代⼊计算-42-442(1)12*0.5==1.79*1088*0.07*1.5*10*(2*10)o o U D C U Lf -= F 这⾥电容C 取7.5*104F 。
电力电子课程设计报告matlab仿真实验
一.课程设计目的(1)通过matlab的simulink工具箱,掌握DC-DC、DC-AC、AC-DC电路的仿真。
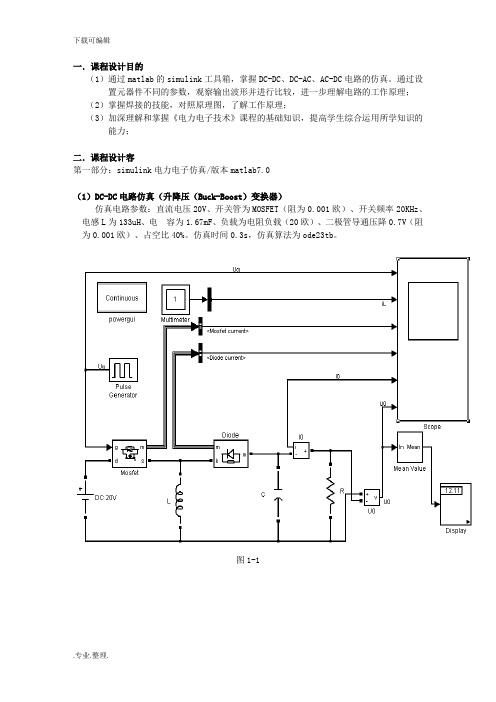
通过设置元器件不同的参数,观察输出波形并进行比较,进一步理解电路的工作原理;(2)掌握焊接的技能,对照原理图,了解工作原理;(3)加深理解和掌握《电力电子技术》课程的基础知识,提高学生综合运用所学知识的能力;二.课程设计容第一部分:simulink电力电子仿真/版本matlab7.0(1)DC-DC电路仿真(升降压(Buck-Boost)变换器)仿真电路参数:直流电压20V、开关管为MOSFET(阻为0.001欧)、开关频率20KHz、电感L为133uH、电容为1.67mF、负载为电阻负载(20欧)、二极管导通压降0.7V(阻为0.001欧)、占空比40%。
仿真时间0.3s,仿真算法为ode23tb。
图1-1占空比为40%的,降压后为12.12V。
触发脉冲、电感电流、开关管电流、二极管电流、负载电流、输出电压的波形。
图1-2占空比为60%的,升压后为28.25V。
触发脉冲、电感电流、开关管电流、二极管电流、负载电流、输出电压的波形。
图1-3•图1-4升降压变换电路(又称Buck-boost电路)的输出电压平均值可以大于或小于输入直流电压,输出电压与输入电压极性相反,其电路原理图如图1-4(a)所示。
它主要用于要求输出与输入电压反相,其值可大于或小于输入电压的直流稳压电源工作原理:①T导通,ton期间,二极管D反偏而关断,电感L储能,滤波电容C向负载提供能量。
②T关断,toff期间,当感应电动势大小超过输出电压U0时,二极管D导通,电感L经D向C和RL反向放电,使输出电压的极性与输入电压在ton期间电感电流的增加量等于toff期间的减少量,得:由的关系,求出输出电压的平均值为:上式中,D为占空比,负号表示输出与输入电压反相;当D=0.5时,U0=Ud;当0.5<D<1时,U0>Ud,为升压变换;当0≤D<0.5时,U0<Ud,为降压变换。
Buck电路的闭环设计及仿真分析

Buck电路的闭环设计及仿真分析一、本文概述随着电力电子技术的飞速发展,电源转换技术已成为现代电子设备不可或缺的一部分。
其中,Buck电路作为一种基本的直流-直流(DC-DC)转换器,因其结构简单、效率高、调节范围宽等优点,在电子设备中得到了广泛应用。
然而,为了确保Buck电路在各种环境和负载条件下的稳定性和高效性,闭环设计显得尤为重要。
本文旨在探讨Buck电路的闭环设计方法,并通过仿真分析验证设计的有效性。
文章首先简要介绍了Buck电路的基本原理和应用背景,然后重点阐述了闭环设计的重要性及常用方法。
在闭环设计部分,文章详细分析了反馈网络的选取、控制策略的制定以及功率级和控制级的协同工作等问题。
同时,结合具体的设计实例,阐述了闭环设计在实际应用中的具体实现过程。
为了验证设计的有效性,文章采用了仿真分析的方法。
通过搭建基于MATLAB/Simulink的仿真模型,对设计的Buck闭环电路进行了全面的仿真分析。
仿真结果证明了闭环设计的有效性,同时也为实际电路的制作和调试提供了重要参考。
文章对闭环设计的Buck电路进行了总结,并指出了未来研究方向和潜在的应用前景。
通过本文的研究,旨在为从事电源转换技术研究和应用的工程师和学者提供有益的参考和启示。
二、Buck电路的基本原理Buck电路,也称为降压转换器,是一种基本的直流-直流(DC-DC)转换电路,其主要功能是将较高的直流电压降低到所需的较低直流电压。
其名称来源于电路中开关元件(如MOSFET或晶体管)的操作,类似于"bucking"(减少或抑制)输入电压。
Buck电路的基本构成包括一个开关(通常是MOSFET),一个电感(或称为线圈),一个二极管(也称为整流器或续流二极管),以及一个输出电容器。
在开关打开时,电流通过电感从输入源流向输出,此时电感储存能量。
当开关关闭时,电感释放其储存的能量,通过二极管向输出电容器和负载供电。
Buck电路的工作原理基于电感的电压-电流关系。
buck电路matlab双闭环控制
buck电路matlab双闭环控制
系统,用来控制机械臂运动。
首先,需要搭建一个用来控制机械臂运动的双闭环控制系统,其中控
制循环如下:
1.目标值:定义机械臂运动的目标值,即机械臂运动的期望位置。
2.检测值:检测机械臂当前的位置,并通过传感器获取数据。
3.控制系统:根据检测值和目标值,计算出机械臂控制信号。
4.输出控制信号:将控制信号输出给机械臂控制器,以控制机械臂的
运动。
实际上,Matlab可以用来构建这种双闭环控制系统。
首先,需要使
用Matlab设计控制器,设计控制器的目的是根据检测值和目标值,计算
出机械臂控制信号。
在Matlab中,这可以用内置的仿真工具仿真实现,
并根据仿真结果,调整控制器参数,以得到理想的控制器设计。
其次,需要使用Matlab实现传感器模型,以获得机械臂当前的位置。
这可以通过构建传感器的传感器模型,模拟机械臂的传感器工作过程来实现,以仿真获得机械臂当前的位置。
最后,要使用Matlab将控制信号输出给机械臂控制器,以控制机械
臂的运动。
这可以使用Matlab与机械臂控制器之间的通信接口,将控制
信号传输到机械臂控制器,以控制机械臂的运动。
Buck电路设计与MATLAB仿真

Buck电路设计与MATLAB仿真LT利用simpowersystems中的模块建立所设计降压变换器的仿真电路。
输入电压为20V的直流电压源,开关管选MOSFET模块(参数默认),用Pulse Generator模块产生脉冲驱动开关管。
分别做两种开关频率下的仿真。
(1)使用理论计算的占空比(D=0.25),记录直流电压波形,计算稳态直流电压值,计算稳态直流纹波电压,并与理论公式比较,验证设计指标。
4、仿真过程::A.建立模型:建立仿真模型如下如所示:B. 记录数据:仿真算法选择ode23tb,最大步长为0.1s,占空比D=0.25进行仿真,记录数据如下表所示:开关频率f s(K Hz) 电感L(mH)电容C(μF)输出电压稳态值V o(V)输出电压纹波值ΔV o(V)电感电流波动值ΔI o(A)10 0.375500 4.736 0.0267 1 0.45 417 4.339 0.0275 0.875 0.1875500 6.435 0.0510 1.850 0.075100 4.745 0.0197 1.0140.09 83.3 4.396 0.0224 0.875与理论值对比开关频率f s(K Hz) 电感L(mH)电容C(μF)输出电压稳态值V o(V)输出电压纹波值ΔV o(V)电感电流波动值ΔI o(A)100.375500 5 0.025 1 0.45 417 5 0.025 0.833 0.1875 5005 0.025 2 500.075 100 5 0.025 1 0.09 83.3 50.0250.833C .仿真过程:当f s =10KHz,L=0.375mH C=500μF , 占空比D=0.25,电流连续的临界状态时,记录稳态直流电压值V o =4.736V ,稳态直流电压理论值5V计算稳态直流纹波电压的理论值2(1D)0.025V8s o o T V V CL-∆==,通过图中得到直流纹波电压为0.0267V当fs=10KHz,L=0.375mH, C=500μF,占空比D=0.25,电流连续的临界状态时,由(1)o SLV D T IL-∆=,得电感电流波动理论值是1A ,由图像得到电感电流波动值是1A ,与理论计算相符合Time/sP u l s e /VSwitch (fs=10KHz,L=0.375mH,C=500uF)Time/sI L /VInductor Current(fs=10KHz,L=0.375mH,C=500uF)Time/sU o /VUo (fs=10KHz,L=0.375mH,C=500uF)Figure-1 fs=10K Hz,L=0.375mH, C=500μF,占空比D=0.25,电流连续的临界状态取1.2倍临界电感值时,输出电压稳态值是4.399V ,理论值是5V ,纹波电压理论值0.025V记录波形测得纹波电压为0.0275V 电感电流波动理论值为0.833A ,由图像得到电感电流波动值是0.875ATime/sP u l s e /VPulse (fs=10KHz,L=0.45mH,C=417uF)Time/sI L /AInductor Current(fs=10KHz,L=0.45mH,C=417uF)取1.2倍电感值时0.1970.19750.1980.19850.1990.19950.20.20050.2010.2015Time/sU o /VUo (fs=10KHz,L=0.45mH,C=417uF)f s =50KHz,L=0.075mH, C=100μF, 占空比D=0.25,电流连续的临界状态时,记录稳态直流电压值V o =4.745V ,理论值是5V ,稳态直流纹波电压理论值0.025V ,由输出电压波形得到实际值为0.0197V电感电流波动理论值为1A ,测量值为1.014AFigure-2取1.2倍电感Time/sP u l s e /VPulse (fs=50KHz,L=0.075mH,C=100uF)Time/sI L /AInductor Current(fs=50KHz,L=0.075mH,C=100uF)x 10-3Time/sU o /VUo (fs=50KHz,L=0.075mH,C=100uF)Figure-3 f s =50KHz,L=0.075mH, C=100μF,占空比D=0.25,电流连续的临界状态取 1.2倍临界电感时,输出电压平均值为4.396V,理论值是5V,纹波电压理论值为0.025V,实际为0.0224V电感电流波动理论值为0.833A,实际值为0.875ATime/sP u l s e /VPulse (fs=50KHz,L=0.09mH,C=83.3uF)Time/sI L /AIductor Current(fs=50KHz,L=0.09mH,C=83.3uF)4.524.54 4.564.58 4.6 4.62 4.64x 10-3Time/sU o /VUo (fs=50KHz,L=0.09mH,C=83.3uF)Figure-4 取1.2倍电感时(2)画出电感电流波形,计算电流波动值并与理论公式对比记录数据如下表 开关频率f s (K Hz) 电感L(m H)电容C(μF)电感电流波动值ΔI o (A) 电感电流波动实际值ΔI o (A)100.375500 110.45 417 0.833 0.875 0.1875 500 2 1.8 500.07510011.014 0.09 83.3 0.8330.8750.10880.10890.1090.10910.10920.10930.10940.1095-1-0.50.511.52Time/sP u l s e /VSwitch (fs=10KHz,L=0.375mH,C=500uF)Time/sI L /VInductor Current(fs=10KHz,L=0.375mH,C=500uF)Figure-5 fs=10KHz,L=0.375mH, C=500μF,占空比D=0.25,电流连续的临界状态0.0250.02550.026-1-0.500.511.52Time/sP u l s e /VPulse (fs=10KHz,L=0.45mH,C=417uF)Time/sI L /AInductor Current(fs=10KHz,L=0.45mH,C=417uF)Figure-6 fs=10KH z,L=0.45mH, C=417μF,占空比D=0.250.02480.02490.025-1-0.500.51Time/sP u l s e /VTime/sI L /AInductor Current(fs=50KHz,L=0.075mH,C=100uF)Figure-7 f s =50KHz,L=0.075mH, C=100μF,占空比D=0.25,电流连续的临界状态0.02480.02490.025-1-0.500.511.52Time/sP u l s e /VPulse (fs=50KHz,L=0.09mH,C=83.3uF)Time/sI L /AIductor Current(fs=50KHz,L=0.09mH,C=83.3uF)Figure-8 f s =50KHz,L=0.09mH, C=83.3μF,占空比D=0.25(3)修改占空比,观察直流电压值的变化。
BUCK电路

题目:BUCK电路闭环PID控制系统的MATLAB仿真目录一、课题简介 (2)二、BUCK变换器主电路参数设计 (2)2.1设计及内容及要求 (2)2.2主电路设计 (2)1、滤波电容的设计 (3)2、滤波电感设计 (3)3、占空比计算 (3)三、BUCK变换器PID控制的参数设计 (3)3.1主电路传递函数分析 (4)四、BUCK变换器系统的仿真 (7)4.1仿真参数及过程描述 (7)4.2仿真模型图及仿真结果 (8)五、总结 (10)六、参考文献 (10)七、附录 (10)一、课题简介BUCK 电路是一种降压斩波器,降压变换器输出电压平均值Uo 总是小于输出电压U D 通常电感中的电流是否连续,取决于开关频率、滤波电感L 和电容C 的数值。
简单的BUCK 电路输出的电压不稳定,会受到负载和外部的干扰,当加入PID 控制器,实现闭环控制。
可通过采样环节得到PWM 调制波,再与基准电压进行比较,通过PID 控制器得到反馈信号,与三角波进行比较,得到调制后的开关波形,将其作为开关信号,从而实现BUCK 电路闭环PID 控制系统。
二、BUCK 变换器主电路参数设计2.1设计及内容及要求1、 输入直流电压(VIN):15V2、 输出电压(VO):5V3、 输出电流(IN):10A4、 输出电压纹波峰-峰值 Vpp ≤50mV5、 锯齿波幅值Um=1.5V6、开关频率(fs):100kHz7、采样网络传函H(s)=0.38、BUCK 主电路二极管的通态压降VD=0.5V ,电感中的电阻压降VL=0.1V,开关管导通压降 VON=0.5V,滤波电容C 与电解电容RC 的乘积为2.2主电路设计根据以上的对课题的分析设计主电路如下:图2-1 主电路图F *Ωμ751、滤波电容的设计因为输出纹波电压只与电容的容量以及ESR 有关,rr rrC L N0.2V V R i I ==∆ (1)电解电容生产厂商很少给出ESR ,但C 与R C 的乘积趋于常数,约为50~80μ*ΩF [3]。
电力电子matlab课程设计

电力电子matlab课程设计一、教学目标本课程旨在通过电力电子Matlab仿真技术的学习,让学生掌握电力电子器件的工作原理和仿真方法,学会使用Matlab软件进行电力电子电路的仿真分析。
具体目标如下:1.理解电力电子器件的基本工作原理和特性。
2.熟悉电力电子电路的基本拓扑结构和性能。
3.掌握Matlab在电力电子仿真中的应用方法。
4.能够运用Matlab进行电力电子电路的建模和仿真。
5.能够分析电力电子电路的稳态和瞬态性能。
6.能够针对特定的电力电子电路,选择合适的仿真参数和方法。
情感态度价值观目标:1.培养学生的创新意识和实践能力。
2.增强学生对电力电子技术的兴趣和热情。
3.培养学生团队合作和自主学习的精神。
二、教学内容本课程的教学内容主要包括三个部分:电力电子器件、电力电子电路和Matlab 仿真技术。
电力电子器件部分,我们将介绍晶闸管、GTO、IGBT等常用电力电子器件的工作原理和特性。
电力电子电路部分,我们将学习常用的电力电子电路拓扑结构,如整流电路、逆变电路、变频电路等,并分析它们的性能。
Matlab仿真技术部分,我们将学习如何使用Matlab进行电力电子电路的建模和仿真,掌握Matlab在电力电子领域中的应用方法。
三、教学方法为了提高学生的学习兴趣和主动性,我们将采用多种教学方法相结合的方式进行教学。
讲授法:用于讲解电力电子器件的基本原理和特性,电力电子电路的基本拓扑结构和性能。
讨论法:通过小组讨论,让学生深入理解电力电子技术的应用和发展。
案例分析法:通过分析具体的电力电子电路案例,让学生学会运用Matlab进行电路仿真。
实验法:安排实验室实践环节,让学生亲自操作电力电子电路,增强实践能力。
四、教学资源为了支持教学内容和教学方法的实施,我们将准备以下教学资源:教材:《电力电子Matlab仿真技术》。
参考书:电力电子技术相关书籍。
多媒体资料:电力电子器件和电路的图片、视频等。
实验设备:电力电子实验装置,Matlab软件。
Buck电路设计与MATLAB仿真

Buck电路设计与仿真姓名:朱龙胜班级:电气1102 学号: 11291065 日期: 2014年5月10日指导老师:郭希铮北京交通大学计算机仿真技术作业四题目:Buck 电路的设计与仿真 1、Buck 电路设计:设计一降压变换器,输入电压为20V ,输出电压5V ,要求纹波电压为输出电压的0.5%,负载电阻10欧姆,求工作频率分别为10kHz 和50kHz 时所需的电感、电容。
比较说明不同开关频率下,无源器件的选择。
2、Buck 电路理论计算: 由以下公式计算:20.252.0.5A (1)3.5%8()4.2odoo o s o s d o LB OB V D V V I RV T D V LCDT V V I I L====∆-==-==1.占空比: 负载电流: 纹波电压: 电流连续条件:得到下列计算结果3、Buck 电路仿真:利用simpowersystems 中的模块建立所设计降压变换器的仿真电路。
输入电压为20V 的直流电压源,开关管选MOSFET 模块(参数默认),用Pulse Generator 模块产生脉冲驱动开关管。
分别做两种开关频率下的仿真。
(1)使用理论计算的占空比(D=0.25),记录直流电压波形,计算稳态直流电压值,计算稳态直流纹波电压,并与理论公式比较,验证设计指标。
4、仿真过程::A .建立模型:建立仿真模型如下如所示:B. 记录数据:仿真算法选择ode23tb,最大步长为0.1s ,占空比D=0.25进行仿真,记录数据如下表所C .仿真过程:当f s =10KHz,L=0.375mH C=500μF, 占空比D=0.25,电流连续的临界状态时,记录稳态直流电压值V o =4.736V ,稳态直流电压理论值5V计算稳态直流纹波电压的理论值2(1D)0.025V 8s o o T V V CL-∆==,通过图中得到直流纹波电压为0.0267V当fs=10KHz,L=0.375mH, C=500μF,占空比D=0.25,电流连续的临界状态时, 由(1)o SL V D T I L-∆=,得电感电流波动理论值是1A ,由图像得到电感电流波动值是1A ,与理论计算相符合Time/sP u l s e /VSwitch (fs=10KHz,L=0.375mH,C=500uF)Time/sI L /VInductor Current(fs=10KHz,L=0.375mH,C=500uF)0.04360.04380.0440.04420.04440.04460.04480.0450.04520.0454Time/sU o /VUo (fs=10KHz,L=0.375mH,C=500uF)Figure-1 fs=10KHz,L=0.375mH, C=500μF,占空比D=0.25,电流连续的临界状态取1.2倍临界电感值时,输出电压稳态值是 4.399V ,理论值是5V ,纹波电压理论值0.025V记录波形测得纹波电压为0.0275V 电感电流波动理论值为0.833A ,由图像得到电感电流波动值是0.875ATime/sP u l s e /VPulse (fs=10KHz,L=0.45mH,C=417uF)Time/sI L /AInductor Current(fs=10KHz,L=0.45mH,C=417uF)0.1970.19750.1980.19850.1990.19950.20.20050.2010.2015Time/sU o /VUo (fs=10KHz,L=0.45mH,C=417uF)f s 流电压值V o =4.745V ,理论值是5V ,稳态直流纹波电压理论值0.025V,由输出电压波形得到实际值为0.0197V电感电流波动理论值为1A ,测量值为1.014ATime/sP u l s e /VPulse (fs=50KHz,L=0.075mH,C=100uF)Time/sI L /AInductor Current(fs=50KHz,L=0.075mH,C=100uF)66.026.04 6.066.086.1x 10-3Time/sU o /VUo (fs=50KHz,L=0.075mH,C=100uF)Figure-3 f s =50KHz,L=0.075mH, C=100μF, 占空比D=0.25,电流连续的临界状态取 1.2倍临界电感时,输出电压平均值为 4.396V ,理论值是5V ,纹波电压理论值为0.025V ,实际为0.0224V电感电流波动理论值为0.833A ,实际值为0.875ATime/sP u l s e /VPulse (fs=50KHz,L=0.09mH,C=83.3uF)Time/sI L /AIductor Current(fs=50KHz,L=0.09mH,C=83.3uF)4.524.54 4.564.58 4.6 4.62 4.64x 10-3Time/sU o /VUo (fs=50KHz,L=0.09mH,C=83.3uF)Figure-4 取1.2倍电感时(2)画出电感电流波形,计算电流波动值并与理论公式对比记录数据如下表Time/sP u l s e /VSwitch (fs=10KHz,L=0.375mH,C=500uF)0.10870.10880.10890.1090.10910.10920.10930.10940.1095Time/sI L /VInductor Current(fs=10KHz,L=0.375mH,C=500uF)Figure-5 fs=10KHz,L=0.375mH, C=500μF,占空比D=0.25,电流连续的临界状态. ... .. 0.0250.02550.026-1-0.500.5Time/sP u l sTime/sI L /AInductor Current(fs=10KHz,L=0.45mH,C=417uF)Figure-6 fs=10KHz,L=0.45mH, C=417μF,占空比D=0.250.02480.02490.025-1-0.500.511.52Time/sP u l s e /VTime/sI L /AInductor Current(fs=50KHz,L=0.075mH,C=100uF)Figure-7 f s =50KHz,L=0.075mH, C=100μF, 占空比D=0.25,电流连续的临界状态 0.02480.02490.025-1-0.5Time/sP u l s e /VTime/sI L /AIductor Current(fs=50KHz,L=0.09mH,C=83.3uF)Figure-8 f s =50KHz,L=0.09mH, C=83.3μF, 占空比D=0.25DV o /VVo-D(Vd=20V)Figure-9 输出电压与占空比关系曲线(4)将电感改为临界电感值的一半,运行仿真模型(只仿真开关频率10k 时的情况,使用理论计算的占空比):记录电感电流波形,电感电流波动值为1.8A 观察不连续电流的波形;记录直流电压波形,计算稳态直流电压值,与理论公式6.67V 对比,,实际值6.435V 并与同一占空比下电流连续时的直流电压值4.736V 进行比较;计算稳态直流纹波电压,由图中得到纹波电压为0.0510V 并与理论公式比较(需根据电流波形计算D2的大小)。
MATLAB仿真 Buck电路的设计与仿真

MATLAB仿真技术作业题目:Buck电路的设计与仿真1、Buck电路设计:设计一降压变换器,输入电压为20V,输出电压5V,要求纹波电压为输出电压的0.5%,负载电阻10欧姆,求工作频率分别为10kHz和50kHz时所需的电感、电容。
实验电路图:Iob=10V/10R=1A10kHz :L=1.875mH C=10mF D=25%电压波形实际值:稳态电压:V0=9.375V 稳态直流纹波电压△V0=38mV理论值:稳态电压:V0=10V 稳态直流纹波电压△V0=50mV误差:V0误差=(10-9.375)/10=6.25%△V0误差=(50-38)/50=24%电流波形实际电流波动值:△I=0.407A理论电流波动值:△I=0.4A误差率=(0.4-0.407)/0.4=-1.75%D=50% 稳态直流电压V0=19.5V 改变L=0.1875mH D=25%电感电流波形直流电压波形稳态直流电压值V0=13.05V 误差率=(13.05-10)/10=30.5%与同一占空比下电流连续时的直流电压值进行比较误差=(13.05-9.375)=3.675V 稳态直流纹波电压△V0=0.5V理论稳态直流纹波电压△V0=0.005V误差=0.5-0.005=0.495V50kHz :L=2.5mH C=5uF D=25% Lmin=75uH直流电压波形实际值:稳态电压:V0=9.375V 稳态直流纹波电压△V0=0.024V理论值:稳态电压:V0=10V 稳态直流纹波电压△V0=0.05V误差:V0误差率=(10-9.375)/10=6.25%△V0误差率=(0.05-0.024)/0.05=52%电流波形实际电流波动值:△I=0.062A理论电流波动值:△I=0.06A误差率=(0.062-0.06)/0.06=3.33%D=50% 稳态直流电压V0=19.508V电压波形。
buck电路闭环pi控制matlab图,BUCK电路闭环控制系统的MATLAB仿真

buck电路闭环pi控制matlab图,BUCK电路闭环控制系统的
MATLAB仿真
BUCK 电路闭环PID 控制系统
的MATLAB 仿真
⼀、课题简介
BUCK 电路是⼀种降压斩波器,降压变换器输出电压平均值Uo 总是⼩于输⼊电压U i 。
通常电感中的电流是否连续,取决于开关频率、滤波电感L 和电容C 的数值。
简单的BUCK 电路输出的电压不稳定,会受到负载和外部的⼲扰,当加⼊PID 控制器,实现闭环控制。
可通过采样环节得到PWM 调制波,再与基准电压进⾏⽐较,通过PID 控制器得到反馈信号,与三⾓波进⾏⽐较,得到调制后的开关波形,将其作为开关信号,从⽽实现BUCK 电路闭环PID 控制系统。
⼆、BUCK 变换器主电路参数设计
2.1设计及内容及要求
1、 输⼊直流电压(VIN):15V
2、 输出电压(VO):5V
3、 输出电流(IN):10A
4、 输出电压纹波峰-峰值 Vpp ≤50mV
5、 锯齿波幅值Um=1.5V
6、开关频率(fs):100kHz
7、采样⽹络传函H(s)=0.3
8、BUCK 主电路⼆极管的通态压降VD=0.5V ,电感中的电阻压降
VL=0.1V ,开关管导通压降 VON=0.5V,滤波电容C 与电解电容
RC 的乘积为
F *Ωμ75。
电力电子技术课程设计-buck开关电源闭环控制的仿真研究50v20v大学论文

CHANGZHOU INSTITUTE OF TECHNOLOGY课程设计说明书课程设计名称:电力电子技术题目:BUCK开关电源闭环控制的仿真研究50V/20V2016年6月电力电子课程设计任务书二级学院:电气与光电工程学院班级:13电二组号: 6# 专业:电气工程及其自动化指导教师:职称:讲师一、课题背景 (1)1.1BUCK电路的工作原理 (1)1.2BUCK开关电源的应用 (2)二、课题设计要求 (3)三、课程设计方案 (3)3.1系统的组成 (3)3.2主电路的设计 (4)3.2.1滤波电容C的计算 (4)3.2.2滤波电感L的计算 (4)3.3闭环系统的设计 (5)3.3.1、闭环系统结构框图 (5)3.3.2系统结构框图 (6)3.4 BUCK变换器原始回路传函的计算 (6)3.5补偿器的传函设计 (7)四、BUCK电路Matlab仿真 (10)4.1 BUCK电路闭环电路的仿真 (10)4.1.1 主电路的Matlab仿真 (10)4.1.2仿真参数设置及仿真结果 (10)4.2 BUCK电路闭环带扰动电路的仿真 (11)4.2.1 主电路的Matlab仿真 (11)4.2.2 参数设置及仿真结果 (12)五、总结 (14)六、参考文献 (15)七、附录 (16)一、课题背景1.1BUCK 电路的工作原理图1-1简单Buck 电路原理图电路工作过程:该电路使用一个全控型器件,图中为Mosfet ,也可以使用其他器件,若采用晶体管,需设置使晶体管关断的辅助电路。
图1-1中,为在Mosfet 关断时给负载中的电感电流提供通道,设置了续流二极管VD 。
滤波电容C 起到稳压的作用。
如图1-2中V 的栅极电压Ugk 波形所示,在t=0时刻驱动开关管导通,电源E 向负载供电,负载电压U 0=E,负载电流i 0按指数曲线上升。
当t=t 1时刻,控制V 关断,负载电流经二极管VD 续流,负载电压U 0近似为零,负载电流呈指数曲线下降。
buck电路闭环控制课程设计
buck电路闭环控制课程设计一、课程目标知识目标:1. 让学生理解Buck电路的基本工作原理,掌握闭环控制系统的组成及功能。
2. 使学生掌握闭环Buck电路的数学模型,能运用相关公式进行电路参数计算。
3. 帮助学生了解闭环控制策略在Buck电路中的应用,如PID控制、PWM调制等。
技能目标:1. 培养学生运用所学知识对闭环Buck电路进行设计和仿真分析的能力。
2. 提高学生解决实际工程问题的能力,能针对不同负载条件优化闭环Buck电路参数。
3. 培养学生团队合作精神和沟通能力,通过小组讨论、汇报等形式分享学习成果。
情感态度价值观目标:1. 培养学生对电力电子技术及自动控制领域的兴趣,激发学习热情。
2. 培养学生严谨的科学态度,注重实验数据和理论分析的结合。
3. 引导学生关注新能源和节能技术,提高环保意识和社会责任感。
课程性质:本课程为电子技术及应用方向的选修课程,侧重于理论与实践相结合,强调学生在实践操作中掌握闭环Buck电路的设计方法。
学生特点:学生已具备一定的电子技术基础,具有一定的数学和物理背景,但可能对闭环控制系统的设计和应用较为陌生。
教学要求:结合学生特点,注重启发式教学,引导学生主动探究,强化实践操作,提高学生的综合应用能力。
将课程目标分解为具体的学习成果,便于教学设计和评估。
二、教学内容1. 介绍Buck电路的基本原理,包括开关元件、二极管、电感、电容等组件的工作状态及能量转换过程。
相关教材章节:第三章“开关电源电路”第一、二节。
2. 详细讲解闭环Buck电路的组成,控制原理及其数学模型,包括状态空间平均法、小信号模型等。
相关教材章节:第三章“开关电源电路”第三节;第四章“闭环控制开关电源”第一、二节。
3. 分析闭环控制策略,如PID控制、PWM调制等在Buck电路中的应用,并通过实例讲解其参数调整方法。
相关教材章节:第四章“闭环控制开关电源”第三、四节。
4. 实践环节:组织学生进行闭环Buck电路设计和仿真实验,包括参数计算、电路搭建、仿真测试等。
电力电子技术MATLAB仿真报告
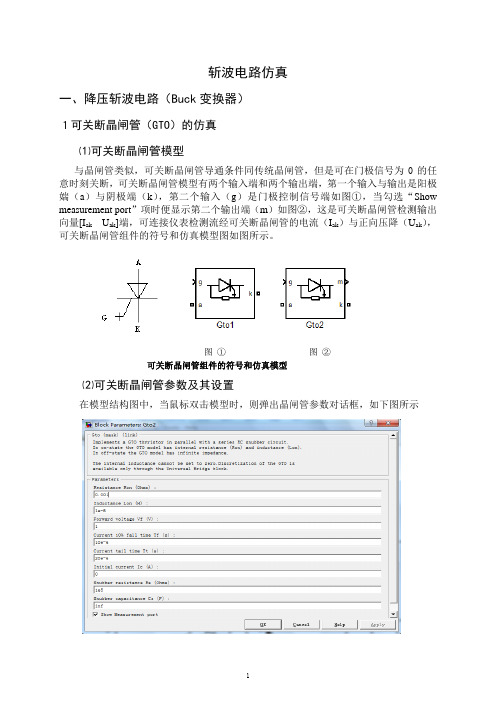
斩波电路仿真一、降压斩波电路(Buck变换器)1可关断晶闸管(GTO)的仿真⑴可关断晶闸管模型与晶闸管类似,可关断晶闸管导通条件同传统晶闸管,但是可在门极信号为0的任意时刻关断,可关断晶闸管模型有两个输入端和两个输出端,第一个输入与输出是阳极媏(a)与阴极端(k),第二个输入(g)是门极控制信号端如图①,当勾选“Show measurement port”项时便显示第二个输出端(m)如图②,这是可关断晶闸管检测输出向量[I ak U ak]端,可连接仪表检测流经可关断晶闸管的电流(I ak)与正向压降(U ak),可关断晶闸管组件的符号和仿真模型图如图所示。
图①图②可关断晶闸管组件的符号和仿真模型⑵可关断晶闸管参数及其设置在模型结构图中,当鼠标双击模型时,则弹出晶闸管参数对话框,如下图所示由图可知,GTO的参数设置与晶闸管参数设置几乎完全相同,只是多了两项 “Current 10% fall time Tf(s)”:电流下降时间Tf。
“Current tail time Tt(s)”:电流拖尾时间Tt。
对于可关断晶闸管GTO模型的电路仿真时,同样宜采用Ode23tb与Oder15s算法。
二、 Buck变换器的仿真⑴电路图及工作原理在t=0时刻驱动GTO导通,电源E向负载供电,由于电感L的存在,负载电流i缓慢上升(电流不能突变),当t=t1时刻,控制GTO关断负载电流经二极管续流,电感L释放电能,负载电流i下降,至一个周期结束再驱动GTO导通重复上一个周期过程,当电路工作于稳态时,负载电流在一个周期的初值和终值相等,此时负载电压平均值为U0=ton*E/(ton+tof)=αE降压斩波电路(阻感负载)原理图⑵建立仿真模型根据原理图用matalb软件画出正确的仿真电路图,整体模型如图所示仿真参数:选择ode23tb算法,将相对误差设置为1e-3,开始仿真时间设置为0,停止仿真时间设置为0.003。
⑶模型参数简介与设置①直流电压源“Amplitude”:直流电压幅值,单位V.测量“measurements”选择是否测量电压设置A=100V,“measurements”选None(不测量电压),如右图所示②二极管“Resistance Ron(Ohms)”:晶闸管导通电阻Ron(Ω)。
Buck电路设计与MATLAB仿真设计
Buck电路设计与仿真姓名:朱龙胜班级:电气1102 学号: 11291065 日期: 2014年5月10日指导老师:郭希铮北京交通大学计算机仿真技术作业四题目:Buck 电路的设计与仿真 1、Buck 电路设计:设计一降压变换器,输入电压为20V ,输出电压5V ,要求纹波电压为输出电压的0.5%,负载电阻10欧姆,求工作频率分别为10kHz 和50kHz 时所需的电感、电容。
比较说明不同开关频率下,无源器件的选择。
2、Buck 电路理论计算: 由以下公式计算:20.252.0.5A (1)3.5%8()4.2odoo o s o s d o LB OB V D V V I RV T D V LCDT V V I I L====∆-==-==1.占空比: 负载电流: 纹波电压: 电流连续条件:得到下列计算结果3、Buck 电路仿真:利用simpowersystems 中的模块建立所设计降压变换器的仿真电路。
输入电压为20V 的直流电压源,开关管选MOSFET 模块(参数默认),用Pulse Generator 模块产生脉冲驱动开关管。
分别做两种开关频率下的仿真。
(1)使用理论计算的占空比(D=0.25),记录直流电压波形,计算稳态直流电压值,计算稳态直流纹波电压,并与理论公式比较,验证设计指标。
4、仿真过程::A .建立模型:建立仿真模型如下如所示:B. 记录数据:仿真算法选择ode23tb,最大步长为0.1s ,占空比D=0.25进行仿真,记录数据如下表所C .仿真过程:当f s =10KHz,L=0.375mH C=500μF, 占空比D=0.25,电流连续的临界状态时,记录稳态直流电压值V o =4.736V ,稳态直流电压理论值5V计算稳态直流纹波电压的理论值2(1D)0.025V 8s o o T V V CL-∆==,通过图中得到直流纹波电压为0.0267V当fs=10KHz,L=0.375mH, C=500μF,占空比D=0.25,电流连续的临界状态时, 由(1)o SL V D T I L-∆=,得电感电流波动理论值是1A ,由图像得到电感电流波动值是1A ,与理论计算相符合Time/sP u l s e /VSwitch (fs=10KHz,L=0.375mH,C=500uF)Time/sI L /VInductor Current(fs=10KHz,L=0.375mH,C=500uF)0.04360.04380.0440.04420.04440.04460.04480.0450.04520.0454Time/sU o /VUo (fs=10KHz,L=0.375mH,C=500uF)Figure-1 fs=10KHz,L=0.375mH, C=500μF,占空比D=0.25,电流连续的临界状态取1.2倍临界电感值时,输出电压稳态值是 4.399V ,理论值是5V ,纹波电压理论值0.025V记录波形测得纹波电压为0.0275V 电感电流波动理论值为0.833A ,由图像得到电感电流波动值是0.875ATime/sP u l s e /VPulse (fs=10KHz,L=0.45mH,C=417uF)Time/sI L /AInductor Current(fs=10KHz,L=0.45mH,C=417uF)0.1970.19750.1980.19850.1990.19950.20.20050.2010.2015Time/sU o /VUo (fs=10KHz,L=0.45mH,C=417uF)f s 流电压值V o =4.745V ,理论值是5V ,稳态直流纹波电压理论值0.025V,由输出电压波形得到实际值为0.0197V电感电流波动理论值为1A ,测量值为1.014ATime/sP u l s e /VPulse (fs=50KHz,L=0.075mH,C=100uF)Time/sI L /AInductor Current(fs=50KHz,L=0.075mH,C=100uF)66.026.04 6.066.086.1x 10-3Time/sU o /VUo (fs=50KHz,L=0.075mH,C=100uF)Figure-3 f s =50KHz,L=0.075mH, C=100μF, 占空比D=0.25,电流连续的临界状态取 1.2倍临界电感时,输出电压平均值为 4.396V ,理论值是5V ,纹波电压理论值为0.025V ,实际为0.0224V电感电流波动理论值为0.833A ,实际值为0.875ATime/sP u l s e /VPulse (fs=50KHz,L=0.09mH,C=83.3uF)Time/sI L /AIductor Current(fs=50KHz,L=0.09mH,C=83.3uF)4.524.54 4.564.58 4.6 4.62 4.64x 10-3Time/sU o /VUo (fs=50KHz,L=0.09mH,C=83.3uF)Figure-4 取1.2倍电感时(2)画出电感电流波形,计算电流波动值并与理论公式对比记录数据如下表Time/sP u l s e /VSwitch (fs=10KHz,L=0.375mH,C=500uF)0.10870.10880.10890.1090.10910.10920.10930.10940.1095Time/sI L /VInductor Current(fs=10KHz,L=0.375mH,C=500uF)Figure-5 fs=10KHz,L=0.375mH, C=500μF,占空比D=0.25,电流连续的临界状态. .0.0250.02550.026-1-0.500.5Time/sP u l sTime/sI L /AInductor Current(fs=10KHz,L=0.45mH,C=417uF)Figure-6 fs=10KHz,L=0.45mH, C=417μF,占空比D=0.250.02480.02490.025-1-0.500.511.52Time/sP u l s e /VTime/sI L /A Inductor Current(fs=50KHz,L=0.075mH,C=100uF)Figure-7 f s =50KHz,L=0.075mH, C=100μF, 占空比D=0.25,电流连续的临界状态 0.02480.02490.025-1-0.5Time/sP u l s e /VTime/sI L /AIductor Current(fs=50KHz,L=0.09mH,C=83.3uF)Figure-8 f s =50KHz,L=0.09mH, C=83.3μF, 占空比D=0.25DV o /VVo-D(Vd=20V)Figure-9 输出电压与占空比关系曲线(4)将电感改为临界电感值的一半,运行仿真模型(只仿真开关频率10k 时的情况,使用理论计算的占空比):记录电感电流波形,电感电流波动值为1.8A 观察不连续电流的波形;记录直流电压波形,计算稳态直流电压值,与理论公式6.67V 对比,,实际值6.435V 并与同一占空比下电流连续时的直流电压值4.736V 进行比较;计算稳态直流纹波电压,由图中得到纹波电压为0.0510V 并与理论公式比较(需根据电流波形计算D2的大小)。
BUCK电路PID控制器设计及仿真
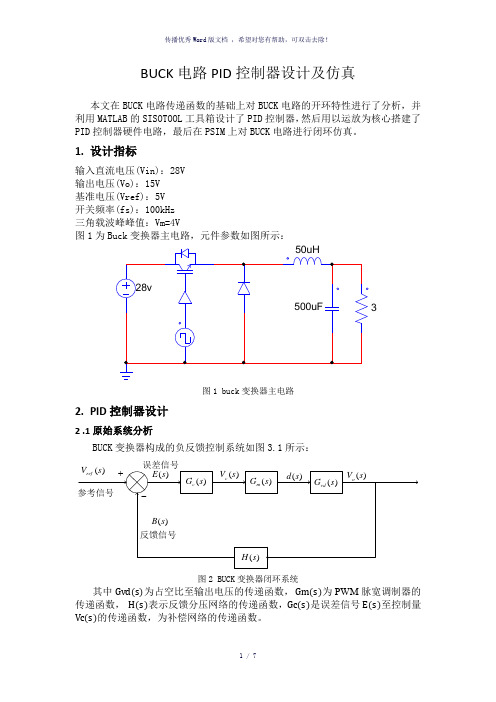
BUCK 电路PID 控制器设计及仿真本文在BUCK 电路传递函数的基础上对BUCK 电路的开环特性进行了分析,并利用MATLAB 的SISOTOOL 工具箱设计了PID 控制器,然后用以运放为核心搭建了PID 控制器硬件电路,最后在PSIM 上对BUCK 电路进行闭环仿真。
1. 设计指标输入直流电压(Vin):28V 输出电压(Vo):15V 基准电压(Vref):5V 开关频率(fs):100kHz 三角载波峰峰值:Vm=4V图1为Buck 变换器主电路,元件参数如图所示:3图1 buck 变换器主电路2. PID 控制器设计2 .1原始系统分析BUCK 变换器构成的负反馈控制系统如图3.1所示:图2 BUCK 变换器闭环系统其中Gvd(s)为占空比至输出电压的传递函数, Gm(s)为PWM 脉宽调制器的传递函数, H(s)表示反馈分压网络的传递函数,Gc(s)是误差信号E(s)至控制量Vc(s)的传递函数,为补偿网络的传递函数。
本系统中,PWM 调制器的传递函数为:ˆ1ˆ4m c m d(s)1G (s)== =v (s)V (1)式中,Vm 为PWM 调制器中锯齿波的幅值。
反馈分压网络的传递函数为:Hs=VrefVo=515=13(2)占空比至输出电压的传递函数为:Gvds=VoD11+sLR+s2LC(3)其中Vo=15V ,D=VVin=1528=0.536,L=50μH ,R=3Ω,C=500μF 。
将参数代入式(3)可得,Gvds=282.533×10-8s2+1.675×10-5s+1 (4) 对于BUCK 变换器系统,其回路增益函数G(s)H(s)为 GsHs=GcsGmsGvdsHs=GcsGos (5) 式中,Gos=GmsGvdsHs(6)为未加补偿网络Gcs 时的回路增益函数,称为原始回路增益函数,将式子(1)、(2)、(4)可得本系统中原始回路增益函数Gos=283.04×10-7s2+ 0.000201s+1 (7)根据式(7)可做出系统原始回路增益函数波特图如图3所示:图3 原始回路增益函数波特图从图3中可以看出穿越频率为fc=1.82kHz ,相位裕度为ψm=4.72deg ,从表面上看,系统是稳定的,但是如果系统中的参数发生变化,系统可能会变得不稳定;另外穿越频率太低,系统的响应速度很慢。