opencv 3.1 例程介绍
opencv基本使用方法
OpenCV基本使用方法一、介绍O p en CV是一个开源的计算机视觉库,提供了丰富的图像处理和计算机视觉算法,可以用于图像处理、目标检测、人脸识别等各种应用。
本文档将介绍O pe nC V的基本使用方法,包括图像读取、显示、保存以及常用的图像处理操作。
二、图像读取与显示1.读取图像要读取图像,可以使用`cv2.im re ad()`函数。
该函数接受图像文件的路径作为参数,并返回一个表示图像的多维数组。
i m po rt cv2i m ag e=cv2.im re ad("im ag e.jp g")2.显示图像要显示图像,可以使用`cv2.im sh ow()`函数。
该函数接受一个窗口名称和一个表示图像的多维数组作为参数。
i m po rt cv2i m ag e=cv2.im re ad("im ag e.jp g")c v2.im sh ow("Im age",i ma ge)c v2.wa it Ke y(0)c v2.de st ro yA ll Wind ow s()三、图像保存与格式转换1.保存图像要保存图像,可以使用`cv2.im wr it e()`函数。
该函数接受图像保存的路径和表示图像的多维数组作为参数。
i m po rt cv2i m ag e=cv2.im re ad("im ag e.jp g")c v2.im wr it e("n ew_i ma ge.j pg",im age)2.格式转换要将图像从一种格式转换为另一种格式,可以使用`c v2.c vt Co lo r()`函数。
该函数接受表示图像的多维数组和转换的标志作为参数。
i m po rt cv2i m ag e=cv2.im re ad("im ag e.jp g")g r ay_i ma ge=c v2.cv t Co lo r(im ag e,cv2.CO LO R_BG R2GR AY)四、常用的图像处理操作1.转换为灰度图要将彩色图像转换为灰度图,可以使用`c v2.cv tC ol or()`函数,并指定转换标志为`cv2.CO LO R_BG R2GR AY`。
opencv 使用手册

opencv 使用手册OpenCV(Open Source Computer Vision Library)是一个开源的计算机视觉库,提供了很多函数,这些函数非常高效地实现了计算机视觉算法。
OpenCV 使用 C/C++ 开发,同时也提供了 Python、Java、MATLAB 等其他语言的接口。
OpenCV 是跨平台的,可以在 Windows、Linux、Mac OS、Android、iOS 等操作系统上运行。
OpenCV 的应用领域非常广泛,包括图像拼接、图像降噪、产品质检、人机交互、人脸识别、动作识别、动作跟踪、无人驾驶等。
OpenCV 还提供了机器学习模块,可以使用正态贝叶斯、K最近邻、支持向量机、决策树、随机森林、人工神经网络等机器学习算法。
要使用 OpenCV,首先需要安装 OpenCV 库。
可以使用 pip 命令安装opencv-python 和 opencv-contrib-python。
安装完成后,可以通过以下命令导入 OpenCV 模块:```pythonimport cv2 as cv```然后可以调用 OpenCV 提供的各种函数来处理图像和视频。
例如,可以使用 `()` 函数读取图像,使用 `()` 函数显示图像,使用 `()` 函数等待用户按键,使用 `()` 函数关闭所有窗口。
以下是一个简单的示例代码,用于读取一张图片并显示出来:```pythonimport cv2 as cv读取图片img = ("./data/")显示图片("image", img)等待用户按键,按下 q 键退出while True:if (1000) & 0xFF == ord("q"):break()```以上是 OpenCV 的基本使用手册,更多详细信息和函数文档可以在OpenCV 官方网站上查看。
c++的opencv使用方法总结

C++的OpenCV使用方法总结在计算机视觉和图像处理领域,OpenCV是一个非常强大的开源库,它提供了丰富的功能和工具,用于处理图像和视频。
作为C++程序员,了解并熟练使用OpenCV库是非常重要的。
本文将对C++中使用OpenCV的方法进行总结,并探讨一些常见的应用和技巧。
一、安装和配置OpenCV在开始使用OpenCV之前,首先需要安装和配置这个库。
在Windows评台上,可以通过下载预编译的二进制文件进行安装;在Linux评台上,可以通过包管理器进行安装。
安装完毕后,还需进行一些环境配置,确保编译器能够正确信息OpenCV库文件。
二、基本图像处理1. 读取和显示图像在C++中使用OpenCV读取和显示图像非常简单,只需几行代码即可完成。
首先需要使用imread函数读取图像文件,然后使用imshow 函数显示图像。
在进行图像显示后,需要使用waitKey函数等待用户按下某个键,以便关闭显示窗口。
2. 图像的基本操作OpenCV提供了丰富的图像处理函数,包括图像缩放、旋转、平移、通道拆分与合并等。
这些函数可以帮助我们对图像进行各种基本操作,从而满足不同的需求。
三、特征提取与描述1. Harris角点检测Harris角点检测是一种经典的特征点检测方法,它可以用来识别图像中的角点。
在OpenCV中,我们可以使用cornerHarris函数来实现Harris角点检测,然后对检测结果进行筛选和标记。
2. SIFT特征提取SIFT是一种广泛应用的特征提取算法,它具有旋转不变性和尺度不变性。
在OpenCV中,我们可以使用SIFT算法来提取图像的关键点和特征描述子,从而实现图像匹配和目标识别等功能。
四、图像分类与识别1. 使用支持向量机(SVM)进行图像分类OpenCV提供了对机器学习算法的支持,包括SVM分类器。
我们可以使用SVM对图像进行分类,从而实现图像识别和目标检测等功能。
2. 使用深度学习模型进行图像识别近年来,深度学习在图像识别领域取得了显著的成就。
易语言opencv模块实例

易语言opencv模块实例易语言是一种面向过程的编程语言,它的特点是简单易学、语法简洁。
而OpenCV是一个开源的计算机视觉库,它提供了丰富的图像处理和计算机视觉算法,可以在易语言中使用OpenCV模块来实现图像处理和计算机视觉的功能。
在使用OpenCV模块之前,我们首先需要安装和配置OpenCV库。
可以从OpenCV官方网站上下载OpenCV的安装包,并按照官方文档进行安装和配置。
安装完成后,我们就可以在易语言中使用OpenCV模块了。
使用OpenCV模块进行图像处理的第一步是加载图像。
我们可以使用OpenCV模块提供的函数来加载图像文件,例如cvLoadImage函数可以加载一个图像文件,并返回一个包含图像数据的对象。
加载图像后,我们可以对图像进行各种处理操作。
OpenCV模块提供了丰富的图像处理函数,例如cvCvtColor函数可以将图像从一种颜色空间转换成另一种颜色空间,cvResize函数可以调整图像的大小,cvThreshold函数可以对图像进行二值化处理等等。
除了基本的图像处理函数之外,OpenCV模块还提供了一些高级的图像处理算法。
例如,我们可以使用cvCanny函数来进行边缘检测,cvHoughLines函数来进行直线检测,cvFindContours函数来进行轮廓检测等等。
这些算法可以帮助我们更好地理解和分析图像。
在进行图像处理的过程中,我们可能需要将处理结果保存成新的图像文件。
OpenCV模块提供了cvSaveImage函数来保存图像文件。
我们可以指定保存的文件名和保存的图像格式,例如保存为JPEG格式的图像文件。
除了图像处理之外,OpenCV模块还可以用于计算机视觉的应用。
例如,我们可以使用OpenCV模块提供的函数来进行人脸检测、目标跟踪、图像识别等。
这些功能可以广泛应用于安防监控、人机交互、智能交通等领域。
通过使用易语言中的OpenCV模块,我们可以方便地实现各种图像处理和计算机视觉的功能。
个人整理的opencv最基本入门资料
---- By Moco Sun 2010.12.19
1. 简介 OpenCV 的全称是:Open Source Computer Vision Library,Intel 公司支持的开源计算机视
觉库,采用 c/c++编写,可以运行在 linux/windows/mac 等操作系统上。Opencv 还提供了 python、ruby、matlab 以及其他语言的接口。
//读取图像宽度 //读取图像高度 //读取图像通道数 //读取图像一行像素所占的字节数
{ pchar = (uchar*)image->imageData + i*widthStep; for (j=0; j<width; j++) { uchar* temp = pchar + j*channel; temp[0] += 10;//通道B temp[1] += 10;//通道G temp[2] += 10;//通道R }
其目标是构建一个简单易用的计算机视觉框架,以帮助开发人员更便捷地设计更复杂的 计算机视觉相关应用程序。Opencv 包含的函数有 500 多个,覆盖了如工厂产品检测、医学 成像、信息安全、用户界面、摄像机标定、立体视觉和机器人等,具体将在下面介绍。 Opencv 使用宽松的 BSD 开源协议,在遵守协议的情况下,允许生成商业产品,不必开发源 代码。
CvSize表示图像的大小,为含两个int的结构体,定义如下
typedef struct CvSize { int width; int height; }
CvSize; 小贴士
Cv与cv的区别:以Cv开头的一般是函数,以cv开头的通常是内联数据元素。 CvPoint结构体不支持默认构造函数,但是可以通过inline的cvPoint(注意首字母小写)函数来创 建一个无名的CvPoint,这在传递一些函数参数经常使用,同理,CvScalar与cvScalar,CvSize与 cvSize等也有这样的用法。
OpenCV安装教程
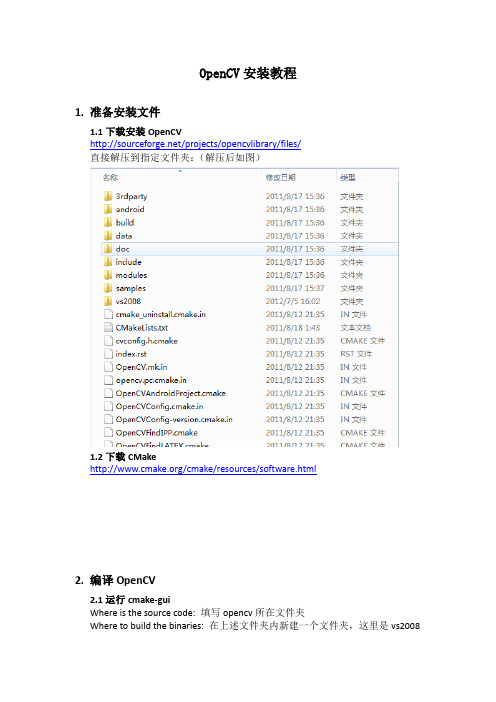
OpenCV安装教程1.准备安装文件1.1下载安装OpenCV/projects/opencvlibrary/files/直接解压到指定文件夹:(解压后如图)1.2下载CMake/cmake/resources/software.html2.编译OpenCV2.1运行cmake-guiWhere is the source code: 填写opencv所在文件夹Where to build the binaries: 在上述文件夹内新建一个文件夹,这里是vs20082.2点击configure,弹出框选visual studio 9 20082.3configure后若有红色,则重复一次configure,完成后点击generate3.配置VC完成上一步操作后,在新建文件夹内会生成OpenCV.sln文件3.1Debug下:选择Solution OpenCV(解决方案OpenCV),右键“Rebuilt Solution”(重新生成)这里要耐心等几分钟再对install项目,右键->built(生成)3.2在release下,重复debug的操作3.3检查此时在vs2008的install里应有Bin应有:Opencv_core231d.dll和opencv_core231.dll等(数字是版本,有d是debug,无d是release)Include->opencv应有Lib应有3.4配置vs环境变量进入:工具->选项->项目和解决方案->VC++目录可执行文件添加:install的bin路径包含文件添加:install的include和include\opencv的路径(两者都要)库文件添加:install的lib路径4.配置环境变量进入计算机->属性->高级系统设置->环境变量在path添加1.install中的bin路径:F:\OpenCV\opencv\vs2008\install\bin;2.由于有些函数需要TBB,所以需要将tbb所在的目录也加入到环境变量Path中。
JavaCV3.1入门教程

JavaCV3.1入门教程话不多说,先简单介绍下JavaCV3.1。
它封装了包括OpenCV以内的大部分图像处理算法,是目前最新的版本。
目前网络上只找到几位大神写的教程,但是版本都在3x以下,配置较麻烦,新手入门容易混淆。
本人本着废话多过文化的宗旨,写个3.1的入门教程。
作者企鹅:伍零贰玖柒柒肆柒叁。
一、准备软件(一)准备javaCV 直接官网下载(),获得一个叫【opencv-3.1.0.exe】的文件。
别运行【右键—解压到当前文件夹】,获得一个【opencv-3.1.0】的文件夹。
(二)准备JDK8 这个就不用多说了吧,因为跑javaFX要jdk8.(三)准备JavaFX 因为官网的Demo是javaFX写的GUI,必须要JavaFX 。
也可以自己用Swing重写GUI。
这个不用下,就在jdk8目录下就有。
(四)准备IDE,推荐使用MyEclipse2013。
(五)下载官网Demo地址【http://opencv-java-tutorials.readthedocs.io/en/latest/】全洋文,看不懂可以用谷歌浏览器的全文翻译。
打不开的可以用蓝灯代理。
二、配置环境(一)导入官方Demo打开MyEclipse2013,【资源管理器空白处—右键—导入—选中现有项目到工作空间—下一步—浏览—找到demo的目录—完成】(二)配置jdk环境【窗口—首选项—java—已安装的jre—添加—把jdk8添加进去】(三)配置javaCV 【窗口—首选项—java—构建路径—用户库—新建—输入javacv—确定—选中javacv—添加外部jar—选中[opencv-3.1.0\opencv\build\java opencv-310.jar]】【展开javacv—本机库位置—编辑—外部文件夹—选中[opencv-3.1.0\opencv\build\java\x86\ opencv_java310.dll]】(四)配置javaFX 找到[jdk1.8.0_91\jre\lib\ext\ jfxrt.jar] 添加进构建路径(五)更改系统库为jdk8这个也不废话了,到这里就可以直接运行了。
C语言实现opencv提取直线、轮廓及ROI实例详解

C语⾔实现opencv提取直线、轮廓及ROI实例详解⼀、Canny检测轮廓在上⼀篇⽂章中有提到sobel边缘检测,并重写了soble的C++代码让其与matlab中算法效果⼀致,⽽soble边缘检测是基于单⼀阈值的,我们不能兼顾到低阈值的丰富边缘和⾼阈值时的边缘缺失这两个问题。
⽽canny算⼦则很好的弥补了这⼀不⾜,从⽬前看来,canny边缘检测在做图像轮廓提取⽅⾯是最优秀的边缘检测算法。
canny边缘检测采⽤双阈值值法,⾼阈值⽤来检测图像中重要的、显著的线条、轮廓等,⽽低阈值⽤来保证不丢失细节部分,低阈值检测出来的边缘更丰富,但是很多边缘并不是我们关⼼的。
最后采⽤⼀种查找算法,将低阈值中与⾼阈值的边缘有重叠的线条保留,其他的线条都删除。
本篇⽂章中不对canny的算法原理作进⼀步说明,稍后会在图像处理算法相关的⽂章中详细介绍。
下⾯我们⽤OpenCV中的Canny函数来检测图像边缘int main(){Mat I=imread("../cat.png");cvtColor(I,I,CV_BGR2GRAY);Mat contours;Canny(I,contours,125,350);threshold(contours,contours,128,255,THRESH_BINARY);namedWindow("Canny");imshow("Canny",contours);waitKey();return 0;}显⽰效果如下:⼆、直线检测⽤到的是霍夫变换检测直线的算法直线在图像中出现的频率⾮常之⾼,⽽直线作为图像的特征对于基本内容的图像分析有着很重要的作⽤,本⽂通过OpenCV中的hough变换来检测图像中的线条。
我们先看最基本的Hough变换函数HoughLines,它的原型如下:void HoughLines(InputArray image, OutputArray lines, double rho, double theta, int threshold, double srn=0, double stn=0 );它的输⼊是⼀个⼆值的轮廓图像,往往是边缘检测得到的结果图像;它的输出是⼀个包含多个Vec2f点的数组,数组中的每个元素是⼀个⼆元浮点数据对<rou,theta>,rou代表直线离坐标原点的距离,theta代表⾓度。
OpenCV例程使用手册

OpenCV例程使⽤⼿册OpenCV例程使⽤⼿册⽬录1 OpenCV说明 (2)2 OpenCV模块测试 (3)3 TI官⽅综合例程 (5)3.1例程说明 (6)3.2编译例程 (6)3.3运⾏ (6)4 Sobel边缘检测算法 (9)5 Canny边缘检测算法 (11)6 VideoCapture图像采集 (12)更多帮助.................................................................................................... 错误!未定义书签。
公司官⽹:/doc/f2cd203bb5daa58da0116c175f0e7cd185251853.html 销售邮箱:sales@/doc/f2cd203bb5daa58da0116c175f0e7cd185251853.html 公司总机:020-8998-6280 1/13技术论坛:/doc/f2cd203bb5daa58da0116c175f0e7cd185251853.html 技术邮箱:support@/doc/f2cd203bb5daa58da0116c175f0e7cd185251853.html 技术热线:020-3893-97341 OpenCV说明OpenCV的全称是:Open Source Computer Vision Library,开源计算机视觉。
OpenCV 是⼀个基于BSD许可(开源)发⾏的跨平台计算机视觉库,可以运⾏在Linux、Windows、Android和Mac OS操作系统上。
它轻量级⽽且⾼效——由⼀系列C函数和少量C++构成,同时提供了Python、Ruby、MATLAB等语⾔的接⼝,实现了图像处理和计算机视觉⽅⾯的很多通⽤算法。
TI AM57x系列处理器⽀持的OpenCV模块有以下14个:core moduleimgproc modulecalib3d modulefeatures2d moduleobjdetect modulephoto modulevideo moduleflann moduleimgcodecs moduleml moduleshape modulestiching modulesuperres modulevideoio moduleOpenCV库的地址:SDK根⽬录/linux-devkit/sysroots/armv7ahf-neon-linux-gnueabi/usr/lib/OpenCV头⽂件路径:SDK根⽬录/linux-devkit/sysroots/armv7ahf-neon-linux-gnueabi/usr/include/opencv2 TI官⽅测试说明链接:/doc/f2cd203bb5daa58da0116c175f0e7cd185251853.html/index.php/OpenCV_AM57_Test_Instructions2 OpenCV模块测试此例程是TI官⽅提供⽤于测试AM5728⽀持的各个OpenCV模块。
opencv 项目案例

opencv 项目案例OpenCV是一个开源的计算机视觉库,它提供了丰富的函数和算法,用于处理和分析图像和视频数据。
下面是一些基于OpenCV的项目案例以及相关参考内容,希望对您有所帮助。
1. 人脸识别人脸识别是计算机视觉领域的一项重要任务,可以应用于安防监控、人机交互等领域。
参考内容可以包括:- 人脸检测:使用OpenCV的人脸检测器(如Haar级联分类器)对输入图像进行人脸检测。
- 特征提取:使用OpenCV的特征提取算法(如局部二值模式直方图)从人脸图像中提取特征向量。
- 训练分类器:使用OpenCV的机器学习算法(如支持向量机)来训练一个人脸分类器。
- 人脸识别:使用训练好的分类器对新的人脸图像进行识别。
2. 手势识别手势识别可以应用于人机交互、虚拟现实等领域。
参考内容可以包括:- 手势检测:使用OpenCV的背景减除算法和运动跟踪算法对输入视频中的手部进行检测和跟踪。
- 手势识别:根据手势的形状、轮廓、手指数量等特征,使用OpenCV的图像处理和机器学习算法对手势进行识别。
- 手势控制:根据识别出的手势,实现对计算机或设备的控制(如控制鼠标、游戏操作等)。
3. 目标检测与跟踪目标检测与跟踪可以应用于安防监控、自动驾驶等领域。
参考内容可以包括:- 目标检测:使用OpenCV的目标检测器(如级联分类器、深度学习模型)对输入图像或视频中的目标进行检测。
- 目标跟踪:根据检测到的目标,使用OpenCV的运动跟踪算法(如卡尔曼滤波、均值漂移)对目标进行跟踪。
- 多目标跟踪:对于多个目标,使用OpenCV的多目标跟踪算法(如多种滤波方法的组合)进行跟踪与管理。
4. 图像处理与增强图像处理与增强可以应用于图像编辑、美颜相机等领域。
参考内容可以包括:- 图像滤波:使用OpenCV的滤波算法(如均值滤波、高斯滤波)对图像进行平滑处理或边缘增强。
- 图像增强:使用OpenCV的直方图均衡化、自适应直方图均衡化等算法对图像进行增强。
opencv里面CV_32FC1家族

opencv⾥⾯CV_32FC1家族因为总是接触过这样⼀些#define⾥⾯的东西但是总也不知道是⼲什么⽤的。
⽽且每看⼀次梦⽐⼀次。
对于这些东西到底是什么的简写根本就不能理解。
原意是跑⼀下这个例程的:cvRectangle(myMat,cvPoint(5, 10),cvPoint(20, 30),cvScalar(50, 50, 200));可是第⼆章就练习了 IplImage这个结构,对于cvMat简直就不知所云,然后第⼀版:CvMat *myMat;cvRectangle(myMat,cvPoint(5, 10),cvPoint(20, 30),cvScalar(50, 50, 200));然后就想显⽰,这必然是不能跑,因为没有实例化,没有分配内存空间,还想在所谓的画布上画图像,应该是不⾏。
所以找来了明杰同学,他也是很热⼼的但是说对于这个cvmat也不是很熟。
于是就这样跑起来了。
IplImage *myImg=cvCreateImage(cvSize(500,500),8,3);cvZero(myImg);cvRectangle(myImg,cvPoint(5, 10),cvPoint(20, 30),cvScalar(50, 50, 200));cvNamedWindow("Example6", CV_WINDOW_AUTOSIZE);cvShowImage("Example6", myImg);cvWaitKey(0);能跑了好开⼼,然后看着他帮我调颜⾊也就是cvScalar 我想这个单词应该是读作:color的把就跟class都写成成clazz⼀样。
/*然后跟我熟悉的rgb有出⼊的点在于这个⾥⾯是bgr也就是第⼀个参数是蓝⾊第⼆个是绿⾊第三个参数是红⾊,我记得不论是我之前的ps课程还是后⾯的⼀些android的点,或者h5⾥⾯那个颜⾊都是rgb的。
c语言opencv例程

c语言opencv例程OpenCV 是一个用于计算机视觉和机器学习的开源库,在 C 语言中,你可以通过调用OpenCV 的库函数来实现各种图像处理和计算机视觉任务。
以下为你提供一些 OpenCV 的 C 语言例程:- adaptiveskindetector.cpp:利用 HSV 空间的色调信息的皮肤检测,背景不能有太多与肤色相似的颜色。
- bagofwords_classification.cpp:目前还看不懂。
- bgfg_codebook.cpp:前后背景分离。
开启摄像头或读取视频。
- bgfg_gmg.cpp:摄像头捕捉,根据运动进行前后背景分离。
- bgfg_segm.cpp:高斯处理视频。
跟踪运动做前背景分割。
BackgroundSubtractorMOG2类。
- blobtrack_sample.cpp:视频跟踪。
跟踪视频中的运动物体,用绿色线框出。
- brief_match_test.cpp:利用 brief 描述算子匹配二维图像特征点。
- build3dmodel.cpp:建立三维模型。
根据给出的检测器对原始进行建模。
- calibration.cpp:相机外定标。
根据自带的函数提取角点后定标。
- calibration_artificial:根据角点自动校准摄像。
初始化后寻找角点再用calibrateCamera 校准。
- chamfer.cpp:图像匹配。
把图像二值后在目标图像中寻找模板图像。
主要调用chamerMatching 函数。
- contours.c:轮廓查找与获取。
cvFindContours 一个函数搞定。
- convert_cascade.c:从文件中装载训练好的级联分类器或者从 OpenCV 中嵌入的分类器数据库中导入,然后另存为一个文件。
- convexhull.cpp:凸包。
产生随机点后计算凸包。
- cout_mat.cpp:OpenCV 中矩阵的输出。
openCV调用摄像头
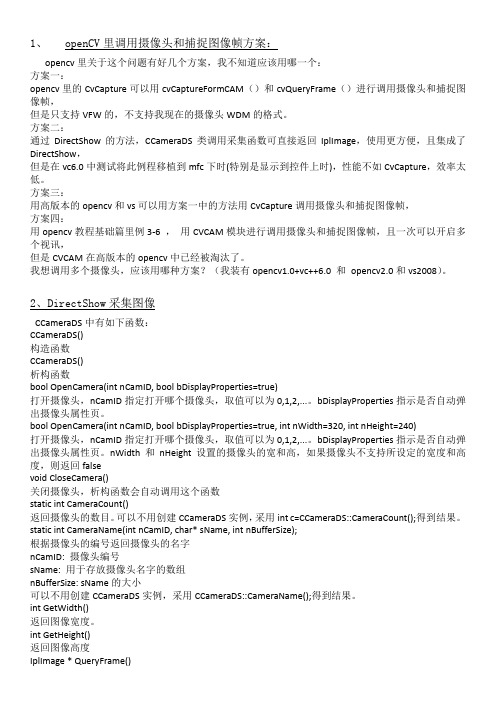
CCameraDS 中有如下函数: CCameraDS() 构造函数 CCameraDS() 析构函数 bool OpenCamera(int nCamID, bool bDisplayProperties=true) 打开摄像头,nCamID 指定打开哪个摄像头,取值可以为 0,1,2,...。bDisplayProperties 指示是否自动弹 出摄像头属性页。 bool OpenCamera(int nCamID, bool bDisplayProperties=true, int nWidth=320, int nHeight=240) 打开摄像头,nCamID 指定打开哪个摄像头,取值可以为 0,1,2,...。bDisplayProperties 指示是否自动弹 出摄像头属性页。nWidth 和 nHeight 设置的摄像头的宽和高,如果摄像头不支持所设定的宽度和高 度,则返回 false void CloseCamera() 关闭摄像头,析构函数会自动调用这个函数 static int CameraCount() 返回摄像头的数目。可以不用创建 CCameraDS 实例,采用 int c=CCameraDS::CameraCount();得到结果。 static int CameraName(int nCamID, char* sName, int nBufferSize); 根据摄像头的编号返回摄像头的名字 nCamID: 摄像头编号 sName: 用于存放摄像头名字的数组 nBufferSize: sName 的大小 可以不用创建 CCameraDS 实例,采用 CCameraDS::CameraName();得到结果。 int GetWidth() 返回图像宽度。
1)加载级联分类器
《Intel Edison智能硬件开发指南:基于Yocto P》读书笔记模板

7.2制作一个摄像 头取景器
7.1从摄像头捕捉 数据
7.3使用Edison制 作人脸跟踪器
7.1.1 USB摄像头的选取 7.1.2增加Linux内核对USB摄像头的支持 7.1.3使用OpenCV获取摄像头图像
7.3.1基本原理 7.3.2在本机应用中使用Arduino库直接操作硬件 7.3.3在本机应用中驱动OLED屏幕显示画面 7.3.4舵机云台控制 7.3.5实现人脸跟踪的facetrack程序
4.2.1使用libjpeg库实现对jpeg图像进行操作 4.2.2将OpenCV库编译成Edison版本 4.2.3在编写的程序中调用OpenCV
5.1使用Yocto Project定制 Edison系统
5.2修改启动引 导配置
5.1.1系统定制的方式与Yocto Project系统简介 5.1.2在开发机中搭建Yocto Project开发环境 5.1.3编译产生Edison完整系统镜像 5.1.4将编译完成的系统镜像写入Edison 5.1.2修改Linux内核配置 5.1.6增加额外的软件包
目录分析
1.2 Edison的硬件 参数
1.1 Edison介绍
1.3接口扩展板
1.1.1第一版Edison 1.1.2第二版Edison
1.2.1 Edison的性能 1.2.2 Edison的硬件布局 1.2.3 70PIN接口引脚定义 1.2.4 Edison的软件架构 1.2.5 Yocto Project
1.3.1两种官方扩展板 1.3.2 Arduino扩展板接口说明 1.3.3 Breakout Board 1.3.4第三方扩展板
2.1 Edison kit for Arduino的用法
2.2 Arduino IDE for Edison
OpenCV使用说明
目录1引言 (1)2 OpenCV的结构 (1)3 VC 6下的安装与配置 (2)3.1安装OpenCV(略) (2)3.2 配置Windows环境变量 (2)4 VC++的环境设置 (4)5如何创建一个项目来开始OpenCV 编程 (5)6如何读入和显示图像 (7)7如何访问图像像素 (10)8如何访问矩阵元素 (11)9如何在OpenCV 中处理我自己的数据 (12)10. 例程 (13)10.1 Kalman滤波进行旋转点的跟踪 (13)10.2 背景建模 (16)10.3 视频I/O (21)10.4 矩阵操作 (23)10.5 轮廓检测 (27)1引言OpenCV(Intel® Open Source Computer Vision Library) 是Intel 公司面向应用程序开发者开发的计算机视觉库,其中包含大量的函数用来处理计算机视觉领域中常见的问题,例如运动分析和跟踪、人脸识别、3D 重建和目标识别等。
目前该函数库的最新版本是OpenCV 4.0,可以通过访问/projects/opencvlibrary免费获得OpenCV 库以及相关的资料。
另外,还可以通过访问/group/OpenCV,对于OpenCV使用中的一些问题与经验进行讨论。
相对于其它图像函数库,OpenCV是一种源码开放式的函数库,开发者可以自由地调用函数库中的相关处理函数。
OpenCV中包含500多个处理函数,具备强大的图像和矩阵运算能力,可以大大减少开发者的编程工作量,有效提高开发效率和程序运行的可靠性。
另外,由于OpenCV具有很好的移植性,开发者可以根据需要在MS-Windows和Linux两种平台进行开发,速度快,使用方便。
2 OpenCV的结构目前OpenCV包含如下几个部分:Cxcore: 一些基本函数(各种数据类型的基本运算等)Cv: 图像处理和计算机视觉功能(图像处理,结构分析,运动分析,物体跟踪,模式识别,摄像定标)Highgui: 用户交互部分(GUI, 图像视频I/O, 系统调用函数)Cvaux: 一些实验性的函数(ViewMorphing, 三维跟踪,PCA,HMM)另外还有cvcam, 不过linux版本中已经抛弃。
EMGUCV基础

第一章Emgu Cv简介:Emgu CV 是.NET 平台下对OpenCV 图像处理库的封装。
也就是OpenCV的.NET 版。
它运行在.NET 兼容的编程语言下调用OpenCV 的函数,如C#、VB、VC++等。
同时这个封装库可以在Mono 下编译和在Linux / Mac OS X 上运行。
Emgu Cv的优势在于.net非常完美的界面,给用户操作带来非常直观的感觉。
Emgu Cv每个版本都有修改一局部函数,在兼容旧版本下做的不是很好。
本书主要采用VS2021+EmguCv3.0版本,希望读者也采用相同的版本进行学习,从而防止一些版本兼容上的问题。
在国内并不流行Emgu Cv,因此关于Emgu Cv的资料比拟少,从而导致了新手学习起来比拟费力,同时使更多想去学习Emgu Cv的人放弃学习,这样的一个恶性循环。
Emgu Cv安装和配置:Emgu Cv的安装还算比拟简单,这边采用Emgu Cv3.0版本进行安装解析。
在官网s:///projects/emgucv/files/emgucv/进入界面选择3.0.0版本进行下载,如图1.1所示。
〔写作时间为2021年4月,因此3.1版本也已经发布。
这边边通过对某一个版本的学习,在去了解其它版本的也是非常简单的。
〕图1.1 Emgu Cv安装下载列表点击3.0.0进入下载界面,如图1.2所示。
前两者是带有Cuda加速的Emgu CV,后两者那么为没有带Cuda加速的Emgu Cv。
读者可以查看电脑是否支持Cuda加速进行选择。
这边笔者下载第二个。
第二部:安装EmguCv下载完成之后,如图1.3所示。
双击安装包进行提取文件,如图1.4所示,安装Emgu Cv的过程和安装其它软件的过程根本一致。
图1.3 EmguCv安装程序图1.4 提取EmguCv文件提取完成之后,如图1.5所示,得到EmguCv文件。
图1.5 EmguCv全部文件第三步:配置EmguCv配置流程如下。
OPENCV图像处理的函数说明
∙Open Source Computer Vision Library ∙∙ 论坛 ∙ 商业 ∙ 专题 ∙ 讲座 ∙ 例程 ∙ 安装 ∙ 常见问题 ∙ 函数说明Cv 图像处理Wikipedia ,自由的百科全书注意:本章描述图像处理和分析的一些函数。
大多数函数都是针对两维象素数组的,这里,我们称这些数组为“图像”,但是它们不一定非得是IplImage 结构,也可以是CvMat 或者CvMatND 结构。
目录[隐藏]∙ 1 梯度、边缘和角点o 1.1 Sobelo 1.2 Laplaceo 1.3 Cannyo 1.4 PreCornerDetecto 1.5 CornerEigenValsAndVecso 1.6 CornerMinEigenValo 1.7 CornerHarriso 1.8 FindCornerSubPixo 1.9 GoodFeaturesToTrack∙ 2 采样、插值和几何变换o 2.1 InitLineIteratoro 2.2 SampleLineo 2.3 GetRectSubPixo 2.4 GetQuadrangleSubPixo 2.5 Resizeo 2.6 WarpAffineo 2.7 GetAffineTransformo 2.8 2DRotationMatrixo 2.9 WarpPerspectiveo 2.10 WarpPerspectiveQMatrixo 2.11 GetPerspectiveTransformo 2.12 Remapo 2.13 LogPolar∙ 3 形态学操作o 3.1 CreateStructuringElementExo 3.2 ReleaseStructuringElemento 3.3 Erodeo 3.4 Dilateo 3.5 MorphologyEx∙ 4 滤波器与色彩空间变换o 4.1 Smootho 4.2 Filter2Do 4.3 CopyMakeBordero 4.4 Integralo 4.5 CvtColoro 4.6 Thresholdo 4.7 AdaptiveThreshold∙ 5 金字塔及其应用o 5.1 PyrDowno 5.2 PyrUp∙ 6 连接部件o 6.1 CvConnectedCompo 6.2 FloodFillo 6.3 FindContourso 6.4 StartFindContourso 6.5 FindNextContouro 6.6 SubstituteContouro 6.7 EndFindContourso 6.8 PyrSegmentationo 6.9 PyrMeanShiftFilteringo 6.10 Watershed∙7 图像与轮廓矩o7.1 Momentso7.2 GetSpatialMomento7.3 GetCentralMomento7.4 GetNormalizedCentralMomento7.5 GetHuMoments∙8 特殊图像变换o8.1 HoughLineso8.2 HoughCircleso8.3 DistTransformo8.4 Inpaint∙9 直方图o9.1 CvHistogramo9.2 CreateHisto9.3 SetHistBinRangeso9.4 ReleaseHisto9.5 ClearHisto9.6 MakeHistHeaderForArrayo9.7 QueryHistValue_1Do9.8 GetHistValue_1Do9.9 GetMinMaxHistValueo9.10 NormalizeHisto9.11 ThreshHisto9.12 CompareHisto9.13 CopyHisto9.14 CalcHisto9.15 CalcBackProjecto9.16 CalcBackProjectPatcho9.17 CalcProbDensityo9.18 EqualizeHist∙10 匹配o10.1 MatchTemplateo10.2 MatchShapeso10.3 CalcEMD2[编辑]梯度、边缘和角点[编辑]Sobel使用扩展 Sobel 算子计算一阶、二阶、三阶或混合图像差分void cvSobel( const CvArr* src, CvArr* dst, int xorder, int yorder, int aperture_size=3 );src输入图像.dst输出图像.xorderx 方向上的差分阶数yordery 方向上的差分阶数aperture_size扩展 Sobel 核的大小,必须是 1, 3, 5 或 7。
opencvsharp案例

opencvsharp案例OpenCVSharp 案例:图像处理和计算机视觉OpenCVSharp 是一个开源库,可将流行的 OpenCV 图像处理和计算机视觉库与 C# 语言集成。
它为.NET 开发人员提供了利用OpenCV 强大功能的机会,而无需编写本机 C++ 代码。
图像读写OpenCVSharp 简化了图像的读取和写入过程。
使用 Imread 方法可以轻松从文件或流中加载图像,而 Imwrite 方法可以将图像保存到指定文件中。
```csharpusing OpenCVSharp;// 从文件读取图像Mat image = Cv2.Imread("path/to/image.jpg");// 将图像保存到文件Cv2.Imwrite("path/to/output.jpg", image);```图像转换OpenCVSharp 提供了各种图像转换功能,包括尺寸调整、旋转和颜色空间转换。
Cv2.Resize 方法可以调整图像大小,Cv2.Rotate 方法可以将其旋转到指定的角度,而 Cv2.CvtColor 方法可以将图像从一种颜色空间(例如 BGR)转换为另一种颜色空间(例如HSV)。
```csharp// 调整图像大小using OpenCVSharp;// 从文件读取图像Mat image = Cv2.Imread("path/to/image.jpg");// 将图像调整为 500x500 像素Cv2.Resize(image, image, new Size(500, 500));// 显示调整大小后的图像Cv2.ImShow("Resized Image", image);```图像增强OpenCVSharp 还包含用于图像增强的一系列工具,例如直方图均衡化、卷积和形态学操作。
Cv2.EqualizeHist 方法可以增强图像的对比度,Cv2.Filter2D 方法可以应用卷积核进行模糊或锐化,而Cv2.MorphologyEx 方法可以执行形态学操作,例如腐蚀或膨胀。
opencv知识点总结
opencv知识点总结1. 图像处理基础图像处理是OpenCV的核心功能之一。
OpenCV提供了丰富的图像处理算法,包括图像的读取、保存、显示、缩放、旋转、灰度化、滤波、边缘检测、直方图均衡化等。
使用OpenCV可以对图像进行各种处理操作,满足不同需求。
2. 特征检测与描述特征检测与描述是计算机视觉领域的重要研究内容,OpenCV提供了多种特征检测与描述算法,如SIFT(尺度不变特征变换)、SURF(速度加速特征)、ORB(Oriented FASTand Rotated BRIEF)等。
这些算法可以用于在图像中检测关键点,并对这些关键点进行描述,从而实现图像的特征匹配和识别。
3. 目标跟踪与运动估计目标跟踪与运动估计是在视频处理中经常遇到的问题。
OpenCV提供了多种目标跟踪算法,如基于光流的运动估计算法、卡尔曼滤波器等。
这些算法可以用于在视频中跟踪移动目标,并估计目标的运动轨迹。
4. 三维重建与立体视觉三维重建与立体视觉是计算机视觉领域的重要研究方向,OpenCV提供了多种三维重建和立体视觉算法,如立体匹配算法、三维点云重建算法、立体标定算法等。
这些算法可以用于对多张图像进行立体匹配,重建出三维场景的结构。
5. 目标识别与分类目标识别与分类是计算机视觉的经典问题,OpenCV提供了多种目标识别和分类算法,如Haar特征级联分类器、HOG(方向梯度直方图)特征分类器、深度学习模型等。
这些算法可以用于在图像中检测和识别出特定目标,如人脸、车辆、物体等。
6. 机器学习与模式识别OpenCV还提供了多种机器学习和模式识别算法,如支持向量机(SVM)、K均值聚类、决策树、随机森林等。
这些算法可以用于对图像数据进行分类、聚类、回归等任务,实现图像的智能识别和分析。
7. 深度学习与神经网络随着深度学习技术的兴起,OpenCV也提供了对深度学习和神经网络的支持。
OpenCV对多种深度学习框架(如TensorFlow、PyTorch)进行了整合,并提供了神经网络模型的导入、预测、微调等功能。
VS2010使用OpenCV的配置过程-已通过多机实验的个人成果综合

OpenCV2.3.1和VS2010联合使用的设置过程:1.到/index.php/Download 下载OpenCV for Windows(也即OpenCV-2.3.1-win-superpack.exe 文件)。
2.将OpenCV-2.3.1-win-superpack.exe 解压并放到某个目录下,例如D:\Program Files\OpenCV-2.3.1-win-superpack\opencv (无需运行setup.exe,解压则可)。
解压后的目录结构如下图。
3.添加OpenCV的include和lib,步骤如下:在VS新建一个Win32控制台应用程序,以下以工程Opencv为例,然后选择菜单栏视图->属性管理器这时在VS编辑器右侧出现属性管理器点开之前建的工程Opencv,会看到Debug|Win32和Release|Win32两个目录点开Debug|Win32目录,找到er,双击打开找到箭头所指的”VC++目录”,打开,在右侧在”包含目录”中加入OpenCV安装目录下的E:\ProgramFiles\OpenCV-2.3.1-win-superpack\opencv\build\include; E:\ProgramFiles\OpenCV-2.3.1-win-superpack\opencv\build\include\op encv;E:\ProgramFiles\OpenCV-2.3.1-win-superpack\opencv\build\include\op encv2;在”引用目录”和”库目录”中加入安装目录下的E:\ProgramFiles\OpenCV-2.3.1-win-superpack\opencv\build\x86\vc10\lib;4.设置环境变量(系统变量和用户变量都设置)在系统变量和用户变量的Path中加入(注意不要直接复制,可能会多出个空格,调整好格式再加到环境变量中)E:\Program Files\OpenCV-2.3.1-win-superpack\opencv\build\x86\vc10 \bin;E:\Program Files\OpenCV-2.3.1-win-superpack\opencv\build\common\tbb\ia32\vc10;5.重启之后打开工程,右击工程项目,选择属性在弹出的对话框里选择”链接器->输入”Debug模式下,在右侧附加依赖项中加入opencv_calib3d231d.lib; opencv_contrib231d.lib; opencv_core231d.lib; opencv_features2d231d.lib; opencv_flann231d.lib; opencv_gpu231d.lib; opencv_highgui231d.lib; opencv_imgproc231d.lib; opencv_legacy231d.lib; opencv_ml231d.lib; opencv_objdetect231d.lib;opencv_ts231d.lib; opencv_video231d.lib;Release模式下,在右侧附加依赖项中加入opencv_calib3d231.lib; opencv_contrib231.lib; opencv_core231.lib; opencv_features2d231.lib; opencv_flann231.lib; opencv_gpu231.lib; opencv_highgui231.lib; opencv_imgproc231.lib; opencv_legacy231.lib; opencv_ml231.lib; opencv_objdetect231.lib; opencv_ts231.lib; opencv_video231.lib;工程设置完成,给个验证程序,如果例程运行过程出现cannot find or open PDB file这个错误,请参照/%D6%F3%D2%BB%B1%AD%B2%E8/blog/item/0302 b3188ef42f5143a9adf9.html的解决方法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.calib3d:相机标定以及三维重建。
2.core:核心模块,包括OpenCV 基本的数据结构,离散傅里叶变换,XML 和YAML 文
件的写入与读取,扫描图像,opencv的互操作,英特尔IPP 异步转换。
3.features2D:AKAZE特征检测与跟踪。
4.gpu:gpu基本操作
5.HighGUI:包括GDAL支持,视频PSNR,SSIM质量指标,视频存储,设置滚动条,更改图
像对比度和亮度。
6.Histograms_Matching:包括直方图,直方图反向投影,直方图比较,直方图均衡,直方
图匹配。
7.ImgProc:包括图像叠加,线性变换,形态学处理,图像金字塔,图像滤波,二值化。
8.ImgTrans:包括Canny,Sobel边缘检测,图像边界扩展,使用filter2D构造线性滤波器,
图像几何变换,霍夫变换,拉普拉斯变换,图像分割,图像重映射。
9.Introduction:图像显示。
10.Ml:机器学习,包括主成分分析(PCA),支持向量机(SVM),非线性SVM。
11.objectDetection:目标检测。
12.photo:计算摄影学,包括去色,HDR成像,非真实性渲染,泊松克隆。
13.ShapeDescriptors:包括查找轮廓,计算多边形的矩,测试点是否在多边形中。
14.TrackingMotion:包括角点检测,Harris角点检测,Shi-Tomasi角点检测,亚像素级角点
检测。
15.Video:背景提取。
16.Viz:基于VTK库实现三维可视化。
17.xfeatures2D:背景提取。
1.3calibration.cpp,calibration.cpp:相机定标。
2.autofocus.cpp:自动聚焦。
3.bgfg_segm.cpp:背景分割。
4.camshiftdemo.cpp:min-shift跟踪。
5.cloning_demo.cpp,cloning_gui.cpp:泊松克隆。
6.connected_components.cpp:显示连通分量。
7.contours2.cpp:查找,绘制填充轮廓。
8.convexhull.cpp:获取轮廓凸包。
9.cout_mat.cpp:矩阵输出。
10.create_mask.cpp:生成掩码。
11.dbt_face_detection.cpp:人脸识别(仅用于UNIX,ANDROID)。
12.delaunay2.cpp:对随机点进行delaunay三角剖分。
13.demhist.cpp:直方图均衡化,调节图像的亮度与对比度。
14.detect_blob.cpp:使用BLOB(二进制大对象)进行区域检测和滤波。
15.detect_mser.cpp:使用MSER进行斑点区域检测。
16.dft.cpp:离散傅里叶变换。
17.ffilldemo.cpp:漫水填充。
18.filestorage.cpp:Mat矩阵存储,读写XML/YML文件。
19.fitellipse.cpp:椭圆拟合。
20.grabcut.cpp:grabcut图像分割。
21.houghcircles.cpp,houghlines.cpp:霍夫变换。
22.image.cpp:图像基本操作。
23.image_alignment.cpp:ECC图像校准。
24.image_sequence.cpp:使用VideoCapture读取一系列图像。
25.imagelist_creator.cpp:生成YAML/XML文件。
26.inpaint.cpp:去水印。
27.intelperc_capture.cpp:Inter SDK。
28.kalman.cpp:卡尔曼滤波。
29.kmeans.cpp:k-means聚类。
place.cpp:laplace边缘检测。
31.letter_recog.cpp:训练RandomTree分类器。
32.lkdemo.cpp:Lukas-Kanade光流法。
33.logistic_regression.cpp:逻辑回归分析。
34.lsd_lines.cpp:基于lsd的直线检测方法。
35.mask_tmpl.cpp:使用掩码进行模板匹配。
36.matchmethod_orb_akaze_brisk.cpp:特征匹配。
37.minarea.cpp:产生随机点后,计算包含所有点的矩形和圆的最小面积。
38.morphology2.cpp:形态学处理。
39.npr_demo.cpp:非真实性渲染.
40.opencv_version.cpp:显示opencv版本。
41.openni_capture.cpp:视频捕捉。
42.pca.cpp:主成分分析。
43.phase_corr.cpp:基于相位的相关图像运动方位跟踪。
44.points_classifier.cpp:鼠标点击给定点和类。
45.polar_transforms.cpp:线性坐标和极坐标相互转换。
46.segment_objects.cpp:训练背景,分割。
47.select3dobj.cpp:相机定标,目标跟踪,目标分割。
48.shape_example.cpp:形状匹配。
49.smiledetect.cpp:人脸识别。
50.squares.cpp:寻找矩形。
51.starter_imagelist.cpp:根据图像列表文件YAML读取并显示图像。
52.starter_video.cpp:打开视频图像,截图。
53.stereo_calib.cpp:立体校准。
54.stereo_match.cpp:立体匹配。
55.stitching.cpp,stitching_detailed.cpp:图像拼接。
56.train_HOG.cpp:HOG(方向梯度直方图)特征。
57.tree_engine.cpp:使用不同的决策树。
l1_optical_flow.cpp:光流法视频跟踪。
59.videostab.cpp:稳定视频。
60.watershed.cpp:分水岭分割。