永磁同步电动机三种基本调速方法
同步电机的变频调速系统

图2-3由交-交变压变频器供电的大型低速同步电动机调速系统
2.4
为了获得高动态性能,同步电动机变压变频调速系统也可以采用矢量控制,其基本原理和异步电动机矢量控制相似,也是通过坐标变换,把同步电动机等效成直流电动机,再模仿直流电动机的控制方法进行控制。但由于同步电动机的转子结构与异步电动机不同,其矢量坐标变换也有自己的特色。
(1)在电动机轴端装有一台转子位置检测器BQ(见图8-7),由它发出的信号控制变压变频装置的逆变器U I换流,从而改变同步电动机的供电频率,保证转子转速与供电频率同步。调速时则由外部信号或脉宽调制(PWM)控制UI的输入直流电压。
(2)从电动机本身看,它是一台同步电动机,但是如果把它和逆变器UI、转子位置检测器BQ合起来看,就象是一台直流电动机。直流电动机电枢里面的电流本来就是交变的,只是经过换向器和电刷才在外部电路表现为直流,这时,换向器相当于机械式的逆变器,电刷相当于磁极位置检测器。这里,则采用电力电子逆变器和转子位置检测器替代机械式换向器和电刷。
(3)同步电动机和异步电动机的定子都有同样的交流绕组,一般都是三相的,而转子绕组则不同,同步电动机转子除直流励磁绕组(或永久磁钢)外,还可能有自身短路的阻尼绕组。
(4)异步电动机的气隙是均匀的,而同步电动机则有隐极与凸极之分,隐极式电机气隙均匀,凸极式则不均匀,两轴的电感系数不等,造成数学模型上的复杂性。但凸极效应能产生平均转矩,单靠凸极效应运行的同步电动机称作磁阻式同步电动机。
在同步电动机中,除转子直流励磁外,定子磁动势还产生电枢反应,直流励磁与电枢反应合成起来产生气隙磁通,合成磁通在定子中感应的电动势与外加电压基本平衡。
永磁同步电机反馈线性化控制
基于Matlab的永磁同步电机反馈线性化控制的仿真***(江南大学物联网工程学院,江苏无锡214036)摘要:反馈线性化方法的目的是通过对非线性系统进行精确线性化处理后,将系统变换成线性系统,本文基此提出了永磁同步电机的反馈线性化控制方法,并利用Matlab软件进行了仿真。
在Simulink中搭建了反馈线性化控制模块、坐标变换模块、PMSM本体模块等。
通过对这些模块的有机组合,从而构建了PMSM反馈线性化控制系统的仿真模型,通过相应的示波器观测输出波形,并对仿真结果做了相应的分析。
关键词:PMSM;同步电机;反馈线性化;MatlabA Simulation of the Feedback Linearization Control of PermanentMagnet Synchronous Machine Based on Matlab***(College of Institute of Things, Jiangnan University, Wuxi, Jiangsu 214036,China) Abstract:Feedback linearization method is adopted for dealing with nonlinear systems, and after that it will change nonlinear system to linearization system. This article is based of the proposed, and give a synchronous motor feedback linearization control method, using matlab and software for simulation. In the simulation, we put up the feedback linearization control, coordinate transformation the module of PMSM, etc. Through the organic combination of these modules, we built the simulation model of PMSM feedback linearization control system, and observing the output wave with varied observations, and made an appropriate analysis of the simulation results.Keywords: PMSM; Permanent Magnet Synchronous;Feedback linearization;Matlab引言:同步电机是转子转速与定子旋转磁场的转速相同的交流电动机。
maxwell软件- 调速永磁同步电机
13调速永磁同步电机在用户已经掌握RMxprt 基本使用的前提下,我们将一些过程简化,以便介绍一些更高级的使用。
有关RMxprt 的详细介绍请参考第一部分的章节。
13.1基本原理调速永磁同步电机的转子转速是通过调节输入电压的频率来控制的。
与标准的直流无刷电机不同,这种电机不需要位置传感器。
永磁同步电机的转子上安装永磁体(有内转子与外转子之分),定子上嵌有多相电枢绕组,其极数与转子相同。
永磁同步电机既可用作发电机,也可用作电动机。
当电机工作在电动状态时,定子多相绕组可由正弦交流电源供电或由直流电源经DC/AC 变换来供电。
当电机工作在发电状态时,定子多相绕组为负载提供交流电源。
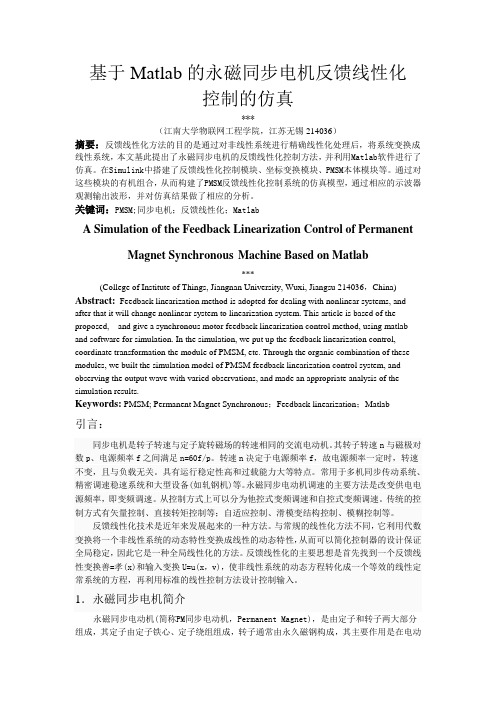
13.1.1 定子绕组正弦交流电源供电永磁同步电机分析方法与三相凸极同步电机相同,电机既可工作在发电状态也可工作在电动状态,通常采用频域矢量图来分析电机的特性。
电机发电状态矢量图如图13.1a ,电机电动状态矢量图如图13.1b 。
发电机b. 电动机图13.1 同步电机相量图图13.1中,R 1、X d 、X q 分别为定子电枢的电阻、d 轴同步电抗和q 轴同步电抗。
aq1q ad 1d X X X X X X +=+=(13.1)上式中,X 1为电枢绕组漏电抗,X ad 和X aq 分别为d 轴电枢反应电抗和q 轴电枢反应电抗。
以输入电压U 为参考矢量, I 滞后U 的角度为φ, 称φ为功率因数角, 则电流矢量为:ϕ-∠=I I(13.2)令I 滞后E 0的角度为ψ。
则可得d 轴和q 轴的电流为:⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡=ψψcos sin I I I q d I (13.3)所以:qd 1I I -=tan ψ (13.4)13.1.1.1 发电机模型在图13.1a ,OM 所代表的矢量可表示为:)j j (aq 11X X R OM +++=I U (13.5)OM 所代表的矢量可用来确定E 0的位置。
令U 滞后E 0的角度为θ,对于发电机称θ为功角,则角度ψ为θϕψ+=(13.6)对于给定的功角θ,我们有;⎥⎦⎤⎢⎣⎡--=⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡-θθsin cos U U E I I X R R X 0q d q 11d (13.7)求得I d 和I q 为:⎥⎦⎤⎢⎣⎡--+-+=⎥⎦⎤⎢⎣⎡θθθθsin )cos (sin )cos (U X U E R U R U E X X X R 1I I d 0110q qd 21q d(17.8)功率角φ:θψϕ-=(13.9)输出电功率:ϕcos UI 3P 2=(13.10)输入机械功率:)(Fe Cua fw 21P P P P P +++= (13.11)式中P fw 、P Cua 、P Fe 分别为风摩损耗、电枢铜损和铁心损耗输入机械转矩:ω11P T =(13.12)ω为同步角速度rad/s13.1.1.2 电动机模型在图13.1, OM 所代表的矢量可表示为:)j j (aq 11X X R OM ++-=I U (13.5’)OM 所代表的矢量可用来确定E 0的位置。
第三章 同步电动机的变频调速控制

30年代
铝镍钴、铁氧体
差
易去磁
1
2 3
90年代 60年代 后期
铁氧体 稀土永磁: SmC05
3.6~4.0 24 33 38~40
价格低 (稀土的1/10) 热稳定性好 不怕去磁 钴含量高、价格高
70年代 初期
第三代
稀土永磁: SmC017 稀土永磁: 钕铁硼 Nd-Fe-B
我国储量世界第一, 温度可达200℃?
图示位置是转子磁极轴线 从某相绕组轴线转过30°的位 置,在此瞬间触发该相晶闸管, 从产生转矩的角度看是最有利 的。在此位置下,在绕组通电 的1/3周期里,载流导体正好 处于比较强的磁场中,所产生 的转矩平均值最大,脉动最小。 从时间相位上看,晶闸管触发 瞬间正好是该感应电势交变过 零之后的30°相位处,习惯上 将此点选作晶闸管触发相位的 基准点,称为空载换流超前 角 。
结 论
0 0 、 三相式,对转矩最为有利。
矛盾:
晶闸管靠反电势自然换流,要求 0 超前,目前常取 0 60 ,或按负载的 动态调节。转矩脉动大:凸极式无换向电 机中,还存在磁阻转矩,当 超前时为 0 负值,将使输出转矩减小。
二、逆变器晶闸管的换流问题
问题的提出: 直流无换向器电机的晶闸管直接接在直流电 源上,导通后无法自行关断,换流困难。必须采取 特殊的换流措施。 解决: 在过激状态下向逆变器提供超前的无功电流, 可利用电机的反电势来实现自然换流。
优点: (1) 只要精确地控制变频电源的频率就能准确控 制转速,无需速度反馈控制。 (2) 转矩干扰只影响同步电动机的功角,不影响 电机的转速可以在极低的转速下运行,调速范围 较宽。 (3)可以调节转子励磁来调节电机的功率因数,甚 至可在 下运行。 (4) 运行在超前功率因数下,有可能利用电动机 的反电势实现负载换流,克服强迫换流的弊病 (晶闸管)。 缺点:同步电机本身结构稍微复杂
电机的反馈线性化控制

即
ud Lv1 Rsid r iq L
进而导出
uq
JL v2 Lr id Rsiq f r kc pn
2、PMSM 矢量控制系统模型【2】
在分析 PMSM 数学模型的基础上, 提出了建立 PMSM 矢量控制系统仿真模 型的方法,系统设计框图如图。
根据模块化建模的思想,控制系统分割为各个功能独立的子模块,其中主要 包括:反馈线性化控制器模块、PMSM本体模块、坐标变换模。 块等。
2-1PMSM 本体模块【4】
电动机和异步电动机高, 而且不需要从电网吸取滞后的励磁电流,从而大大地节 约了无功功率,极大地提高了电机的功率因数。因此,永磁同步电动机比异步电 动机节电,效率高。 (2)稀土永磁同步电动机较异步电机尺寸大大减少, 成为高密度, 高效率的电机。 (3)转子结构大大简化,提高了电机运行的稳定性。 永磁同步电动机, 按照定子绕组感应电动势波形的不同,可分为正弦波永磁 同步电动机和梯形波永磁同步电动机, 正弦波永磁同步电动机即通常所说的永磁 同步电动机(PMSM);梯形波永磁同步电动机又称为无刷永磁直流电动机(BLDC)。 无刷永磁直流电机具有功率密度高,控制简单,反馈装置简单等优点,但由电流 换向引起的转矩纹波是无法消除的,特别,在低速区无刷直流永磁电机的脉动转 矩会引起转速波动, 将严重影响驱动的性能,而正弦永磁电动机产生的转矩脉动 通常低于方波电流永磁电动机。 这是由于正弦永磁同步电动机是由正弦交流供电, 不存在换向时的冲击电流, 通过转子位置检测控制电流相位,可以获得平稳的转 矩特性。所以,对高性能调速系统,最好采用永磁同步电动机调速系统,而不采 用无刷直流电机调速系统。
常用同步电动机
移量小、并要求精确、均匀。这就要求步 进电动机步距角小、步距精度高、不丢步 或失步。 (4)输出转矩大,可直接带动负载。
第50页/共80页
指令
微电脑及电源
步进电动机
控制电脉冲
机床工作台 传动齿轮
丝杠
第51页/共80页
二、步进电动机的工作
原理
以三相反应式步进电机为例
6b
B
C
V1b
V6b
→ 控 制 电 子 开 晶体管控制电路
关中
转子位置传感器
晶体管的通断 第26页/共80页 →
123..→V2e51.m导V导=通3T导通,m,通→B,a→转→过B1Ba20再a0与→转TBe过mf=垂T1m2直00
→Tem=Tm V2
V1
0
V1
IA
IA
Bf
V4 IB
组成:定子有六个磁极,每两 对应的磁
极绕有一相绕组A 。转子有四个
均匀分布 C’
1 B’
的齿,齿宽与2 定子4 磁极极靴宽
度相等。 ’ B
C 3
A’
第52页/共80页
1.三相单三拍运行方
单:每次只式有一相绕组通电。
三拍:三次切换为脉冲的一次循 环。
A相通电:磁力线总是力图走磁 A 阻最小的路 1
C’ B’
U U N,f fN,P2 c Im f (I f )
假设:(1)不计Pcu,PFe,Pm,
(2)(隐极机 X d X q X t
P1
)
Pem
mUI cosm
m
E0U Xt
sin m
c
E0 sin m c及I cosm c
运动控制系统-第6章 同步电动机变压变频调速系统

2
当负载转矩加大为 TL4时,转子减速使角θ 增加,电磁转矩 Te减4 小,导致θ继续,最 终,同步电动机转速偏离同步转速,这种 现象称为“失步”。
2
在 的范围 内,2 同步电动机不 能稳定运行,将产 生失步现象。
Te
Te3
Te4
0
3 4
2
图6-4 在 的范围内,
2
Te1
TL1
3U s Es
m xd
sin1
0
2
当负载转矩加大为 时,转子减速使角θ增加,
当 衡,
,电磁 转 2矩 2
和TL负2 载转矩
Te 2
又达到平
TL2
Te 2
TL2
3U s Es
m xd
s in 2
同步电动机仍以同步转速稳定运行。
0
2
若负载转矩又恢复
为 TL1,则角 恢 复
3. 梯形波永磁自控变频同步电动机即无刷直 流电动机——以梯形波永磁同步电动机为 核心的自控变频同步电动机,由于输入方 波电流,气隙磁场呈梯形波分布,性能更 接近于直流电动机,但没有电刷,故称无 刷直流电动机。
无刷直流电动机实质 上是一种特定类型的
iA eA eA
同步电动机,气隙磁 场和感应电动势是梯
第6章
同步电动机变压变频 调速系统
同步电动机直接投入电网运行时,存在 失步与起动两大问题,曾一直制约着同 步电动机的应用。同步电动机的转速恒 等于同步转速,所以同步电动机的调速 只能是变频调速。
变频调速的发展与成熟不仅实现了同步 电动机的调速问题,同时也解决了失步 与起动问题,使之不再是限制同步电动 机运行的障碍。
永磁同步电动机的转子用永磁材料制 成,无需直流励磁。
永磁同步电动机弱磁调速控制

1.1 永磁同步电机简介
由于高性能电机控制理论和电力电子技术以及微机控制技术的迅速发展,永磁 (PM)电机以其高效性,高转矩惯量比,高能量密度而得到了更多关注。 PM电机通常分为两类: 永磁无刷直流电机(BLDC)和永磁同步电机(PMSM)。 BLDC 通常具有梯形波反电势波形,如图1.1b)。梯形波反电势由定子集中绕组和方波充磁的 表面磁铁产生。其转子位置的测量可以非常方便地利用反电势的测量得到,控制方式 简单。但存在转矩脉动,换相间存在冲击电流,一般不太适用于高性能驱动。
学位论文版权使用授权书
本学位论文作者完全了解学校有关保留、使用学位论文的规定, 即:学校有权保留并向国家有关部门或机构送交论文的复印件和电 子版,允许论文被查阅和借阅。本人授权华中科技大学可以将本学 位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、 缩印或扫描等复制手段保存和汇编本学位论文。
ωr
+
ωf
−
PI
Tr
+
dT −
Hystersis controller
ψf
32
4
56
1
ia
ib
Tf
ψf
1
Ψ, T
Controller
VDC ia ib
s
encoder
PMSM
(c) 直接转矩控制器 图 1.3 PMSM 的主要控制方法 1.2.1 VVVF 控制 VVVF控制策略的控制变量为电机的外部变量,即电压和频率。控制系统将参考 电压和频率输入到实现VVVF的调制器中,最后由逆变器产生一个交变的正弦电压施 加在电机的定子绕组上,使之运行在指定的电压和参考频率下。逆变器所用的调制方 式为脉冲宽度调制(PWM)。PWM可以有多种不同的实现方式,如空间矢量调制 (SVPWM)。PMSM的VVVF控制方框图如图1.3(a)所示。 这种控制方法无需从电机引入任何速度、位置或电压、电流反馈信号,属于开环 控制。这种控制系统易于实现且价格低廉。由于系统中不引入速度、位置或其它任何 反馈信号,因此不能即时捕捉电机状态,无法对电机进行精确的电磁转矩控制。由于 仅使用一个调节器实现对输入电压和磁链的调制,将导致输入电压、频率信号和电机 最终的转矩、速度反应之间的通讯速度降低,使电机的响应变慢。这种驱动系统仅适 用于风机、水泵之类无需精确控制的场合。 1.2.2 磁场定向矢量控制 Blaschke在1971年发表了第一篇有关异步电机(IM)的矢量控制(VC)的方法,之后 该方法被应用于PMSM中。这种控制方法目前已经全面发展并在工业上被认为是较成
《永磁同步电动机》课件

面临的挑战与解决方案
成本问题
随着高性能永磁材料价格的上涨,永磁同步电动机的成本 也随之增加。解决方案包括采用替代性材料、优化设计等 降低成本。
控制精度问题
在某些高精度应用场景中,永磁同步电动机的控制精度仍 需提高。解决方案包括采用先进的控制算法和传感器技术 提高控制精度。
可靠性问题
在高温、高湿等恶劣环境下,永磁同步电动机的可靠性可 能会受到影响。解决方案包括加强散热设计、提高材料耐 久性等提高可靠性。
总结词
风力发电系统中应用永磁同步电动机,具有 高效、可靠、低噪音等优点。
详细描述
风力发电系统需要能够在风能不稳定的情况 下高效、可靠运行的电机,永磁同步电动机 能够满足这些要求。其高效、可靠、低噪音 的特性使得风力发电系统在能源利用效率和
可靠性方面具有显著优势。
THANKS
感谢观看
工作原理
永磁同步电动机通过控制器调节电机电流,使电机转子与定子磁场保持同步, 从而实现电机的运转。其工作原理基于磁场定向控制和矢量控制技术。
种类与特点
种类
永磁同步电动机根据结构可分为 表面贴装式、内置式和无铁心式 等类型。
特点
永磁同步电动机具有效率高、节 能效果好、运行稳定、维护方便 等优点,广泛应用于工业自动化 、新能源、电动汽车等领域。
05
CATALOGUE
永磁同步电动机的发展趋势与挑战
技术发展趋势
高效能化
随着技术的不断进步,永磁同步电动机的效率和性能不断提升, 能够满足更多高效率、高负载的应用需求。
智能化
随着物联网、传感器等技术的发展,永磁同步电动机的智能化水平 不断提高,可以实现远程监控、故障诊断等功能。
紧凑化
为了适应空间受限的应用场景,永磁同步电动机的尺寸和重量不断 减小,同时保持高性能。
交流与直流电机调速方法分类原理优缺点应用
交流与直流电机调速方法分类原理优缺点应用三相交流电机调速有哪些方法1 变极调速.2变频调速.3变转差率调速...三相交流电机有很多种。
1.普通三相鼠笼式。
这种电机只能通过变频器改变电源频率和电压调速(F/U)。
2.三相绕线式电机,可以通过改变串接在转子线圈上的电阻改变电机的机械特性达到调速的目的。
这种方式常用在吊车上。
长时间工作大功率的绕线式电机调速不用电阻串接,因为电阻会消耗大量的电能。
通常是串可控硅,通过控制可控硅的导通角控制电流。
相当于改变回路中的电阻达到同上效果。
转子的电能经可控硅组整流后,再逆变送回电网。
这种方式称为串级调速。
配上好的调速控制柜,据说可以和直流电机调速相比美。
3.多极电机。
这种电机有一组或多组绕组。
通过改变接在接线合中的绕组引线接法,改变电机极数调速。
最常见的4/2极电机用(角/双Y)接。
4.三相整流子电机。
这是一种很老式的调速电机,现在很用了。
这种电机结构复杂,它的转子和直流电机转子差不多,也有换向器,和电刷。
通过机械机构改变电刷相对位置,改变转子组绕组的电动势改变电流而调速。
这种电机用的是三相流电,但是,严格上来说,其实它是直流机。
原理是有点象串砺直流机。
5.滑差调速器。
这种方式其实不是改变电机转速。
而是改变和是电机轴相连的滑差离合器的离合度,改变离合器输出轴的转速来调速的。
还有如,硅油离合器,磁粉离合器,等等,一此离合机械装置和三相电机配套,用来调速的方式。
严格上来说不算是三相电机的调还方式。
但是很多教材常常把它们算作调速方式和一种。
直流电机的调速方法一是调节电枢电压,二是调节励磁电流,而常见的微型直流电机,其磁场都是固定的,不可调的永磁体,所以只好调节电枢电压,要说有那几种调节电枢电压方法,常用的一是可控硅调压法,再就是脉宽调制法(PWM)。
PWM的H型属于调压调速。
PWM的H桥只能实现大功率调速。
国的超大功率调速还要依靠可控硅实现可控整流来实现直流电机的调压调速。
直流电机的调速方法

直流电机的调速方法
一、概述
一是调节电枢电压,二是调节励磁电流,
1、常见的微型直流电机,其磁场都是固定的,不可调的永磁体,
所以只好调节电枢电压。
调节电枢电压方法:
常用的一是可控硅调压法,再就是脉宽调制法(PWM)。
PWM的H型属于调压调速。
PWM的H桥只能实现大功率调速。
国内的超大功率调速还要依靠可控硅实现可控整流来实现直流电机的调压调速。
2、弱磁调速,通过适当减弱励磁磁场的办法也可以调速。
二、直流电机与交流电机调速比较
最大的优点就是直流电机可以实现“平滑而经济的调速”;直流电机的调速不需要其它设备的配合,可通过改变输入的电压/电流,或者励磁电压/电流来调速。
交流永磁同步的调速是靠改变频率来实现的,需要变频器。
直流电机虽不需要其它的设备来帮助调速,但自身的结构复杂,制造成本高;在大功率可控晶闸管大批量使用之前,直流电动机用于大多的调速场合。
在大功率可控晶闸管工业生产化后,交流电动机的调速变得更简单了,交流电动机的制造成本低廉,使用寿命长等优点就表现出来。
三、直流电机的调速方法的优缺点
不同的需要,采用不同的调速方式,应该说各有什么特点。
1.在全磁场状态,调电枢电压,适合应用在零至基速以下范围内调速。
不能达到电机的最高转速。
2.在电枢全电压状态,调激磁电压,适合应用在基速以上,弱磁升速。
不能得到电机的较低转速。
3.在全磁场状态,调电枢电压,电枢全电压之后,弱磁升速。
适合应用在调速范围大的情况。
这是直流电机最完善的调速方式,但设备复杂,造价高。
永磁同步电动机调速范围的优化及性能分析

2021年第49卷第3期D设计分析esign and analysis 程献会等 永磁同步电动机调速范围的优化及性能分析17 收稿日期:2020-11-24基金项目:山西省自然基金(2013011035-1);中国博士后科学基金(2018M640250)永磁同步电动机调速范围的优化及性能分析程献会,王淑红(太原理工大学电气与动力工程学院,太原030024)摘 要:根据内嵌式调速永磁同步电动机的弱磁控制特点,以弱磁扩速倍数为优化目标,利用有限元仿真软件,分析了内嵌式调速永磁同步电动机矩形和V 形永磁体尺寸和位置对电机参数和调速范围的影响,通过优化永磁体的位置和尺寸扩大了电机弱磁调速范围㊂计算了优化后电机的参数,对比了优化前后电机调速的范围㊂为内嵌式调速永磁同步电动机的优化和参数计算提供一定的参考㊂关键词:内嵌式调速永磁同步电动机;永磁体尺寸;调速范围;有限元分析中图分类号:TM351 文献标志码:A 文章编号:1004-7018(2021)03-0017-04Optimization and Performance Analysis of Speed Control Range of Permanent Magnet Synchronous MotorCHENG Xian -hui ,WANG Shu -hong(School of Electrical and Power Engineering,Taiyuan University of Technology,Taiyuan 030024,China)Abstract :According to the embedded control weak magnetic control characteristics of permanent magnet synchronousmotor,with weak magnetic speed ratio as the optimization goal,and using finite element simulation software,embedded speed permanent magnet synchronous motor was analyzed rectangle and V the size and position of permanent magnet motor parameters and the influence of the speed range,through optimizing the position and size of the permanent magnet motor weak magnetic speed range had expanded.The parameters of the optimized motor were calculated,and the range of motor speed before and after optimization was compared.It provided a certain basis for the optimization and parameter calculationof the built-in speed-regulating permanent magnet synchronous motor.Key words :built-in speed-regulating permanent magnet synchronous motor,permanent magnet size,speed regulatingrange,finite element analysis0 引 言永磁同步电动机具有结构简单㊁运行可靠㊁效率高等显著优点,其应用范围较为广泛,在航空㊁国防㊁工业生产和日常生活中都可以看到它的身影[1-2]㊂已有许多专家学者对永磁同步电动机进行过优化设计,从而使电机性能更优越,使用更广泛㊂文献[3]采用田口法,以电机的效率和磁钢用量作为优化目标,对内嵌式永磁电动机进行优化设计;文献[4]同样采用田口法对铁耗和转矩脉动进行了优化㊂文献[5-6]对电动汽车用永磁同步电动机进行了电磁设计和弱磁调速分析;文献[7]中搭建了凸极式永磁同步电动机弱磁调速的控制系统;文献[8]从内置式永磁同步电动机的数学模型及弱磁控制方式入手,采用数值计算方法,分析了不同参数对电机弱磁调速的影响;文献[9]讨论了永磁体分段对永磁同步电动机参数和调速范围的影响;文献[10]设置了一种分段Halbach 结构的表贴式永磁同步电动机以降低涡流损耗等;文献[11]对V 形异步起动永磁同步电动机的齿槽转矩进行了优化;文献[12]采用多目标遗传算法对不同类型的电机结构进行优化㊂对于调速永磁同步电动机,在传统的控制方法下,电机受到电源电压和电流的限制,基速以上很难有较大的调速范围㊂为了扩大电机的调速范围,并确保电机的恒功率运行范围和电机性能,不仅要采用带有弱磁控制模块的控制系统,电机本体参数也应与控制系统有较好的配合,满足弱磁调速策略对电机参数的要求㊂永磁同步电动机的励磁由电机转子上的永磁体提供,永磁体在电机制作时已放置好,励磁无法根据实际需要进行调节,所以在电机设计时应考虑永磁体的尺寸和位置,为弱磁调速控制提供合理的永磁体磁链及交直轴电感参数㊂本文在电机设计过程中,以弱磁调速的倍数为电机永磁体尺寸的优化目标,使用有限元仿真软件,对两种不同形状的永磁体电机进行参数化仿真,确定电机永磁体的位置和尺寸对电机调速范围的影响㊂分析了矩形永磁体和V 形永磁体在不同尺寸和位置,对电机参数的影响,给出永磁体的尺寸,完 D设计分析esign and analysis 2021年第49卷第3期 程献会等 永磁同步电动机调速范围的优化及性能分析 18 成对电机调速范围的优化并分析电机性能㊂1 永磁同步电动机弱磁调速的基本原理1.1 永磁同步电动机的数学模型在三相电流对称㊁电机稳定运行且忽略定子绕组电阻㊁铁心饱和㊁铁耗的情况下,永磁同步电动机在d,q坐标轴下的数学模型如式(1)㊁式(2)㊂电压方程:u=u2d+u2q= ω(L q i q)2+(L d i d+ψf)2(1)电磁转矩方程:T em=32p[ψf i q+(L d-L q)i d i q](2)由电压方程可得出:ω=u(L q i q)2+(L d i d+ψf)2(3)式中:p为电机的极对数;L q,L d分别为电机定子的交直轴电感;i q,i d分为电机定子的交直轴电流;ψf 是电机的永磁体磁链;ω为电机角频率㊂由式(3)可以看出,当电机的端电压和电流达到极限值,且电流全部为直轴去磁电流时,电机可以达到理想最大转速:ωmax=u limψf-L d i lim(4) 调速永磁同步电动机的电压和电流的极限值取决于控制系统的逆变器,如果需要更高的转速范围,需要减小永磁体的磁链和增加直轴电感㊂但过小的永磁体磁链会造成电机转矩的下降,在电机优化时应综合考虑,不应为了单纯提高调速范围而牺牲太多的转矩㊂1.2 基于最大转矩电流比控制的弱磁调速性能分析凸极永磁同步电动机采用最大转矩电流比控制时,电机的电流矢量应满足:∂(T em/i s)∂i d=0∂(T em/i s)∂i q=üþýïïïï(5) 定子电流矢量轨迹如图1所示,当电机的端电图1 定子电流矢量轨迹压和电流达到极限值时,经过公式推导可得出此时的转折速度:ωb=u lim(L q i lim)2+ψ2f+(L d+L q)C2+8ψf L d C16(L d-L q)(6)式中:C=-ψf+ψ2f+8(L d-L q)2i2lim㊂ 定义电机的弱磁扩速倍数:k=ωmaxωb(7) 将弱磁率ξ=L d i sψf和凸极率ρ=L qL d代入到式(7)中,可得:k=ωmaxωb= 1+(ρξ)2+116(1-ρ)[(1+ρ)C2f+8C f]1-ξ(8)式中:C f=-1+1+8(1-ρ)2ξ2㊂根据式(8)可得如图2所示的凸极永磁同步电动机弱磁扩速倍数随凸极率和弱磁率的变化曲线,可以看出,电机的弱磁扩速倍数随凸极率和弱磁率的增加而增加㊂对永磁同步电动机的凸极率和弱磁率进行优化,便可以影响电机的扩速范围㊂图2 弱磁扩速倍数k与ξ,ρ的关系2 永磁同步电动机优化分别对原功率为2.2kW,永磁体为矩形和V形的两台内置式永磁同步电动机进行优化,以弱磁率和凸极率为优化目标,使其满足两倍以上的调速范围㊂2.1 建立电机的物理模型样机的基本参数如表1所示,电机的物理模型如图3㊁图4所示㊂在电机基本结构尺寸不变的情况下,对电机的永磁体尺寸㊁位置进行优化,永磁体尺寸主要有永磁体宽度b m,永磁体磁化方向长度h m㊂矩形永磁体的位置主要靠轴心距确定,就是永磁体下边缘距离电机中心的距离,即o2㊂轴心距越大,永磁体离气隙越近,离电机转轴的中心则越远㊂V形永磁体的位置还要依靠永磁体旋转角度来确 2021年第49卷第3期 D设计分析esign and analysis 程献会等 永磁同步电动机调速范围的优化及性能分析19 定,旋转角为θ㊂表1 电机的基本参数参数值参数值定子外径Φso /mm 155定子槽数36定子内径Φsi /mm 98极对数2转子内径Φri /mm 38额定转速n /(r㊃min -1)1500气隙长度δ/mm0.6轴向长度l /mm105图3 矩形永磁体电机模型图4 V 形永磁体电机模型2.2 电机的优化在初步确定电机额定电流的情况下,对永磁体的尺寸范围进行优化设计㊂利用Maxwell 软件,分别建立两种永磁同步电动机的2D 模型,并设置永磁体宽度㊁磁化方向长度和轴心距为参数化变量,求解不同情况下的凸极率和弱磁率,参数化范围如表2㊁表3所示㊂表2 矩形永磁体参数矩形参数范围步长宽度b m /mm30~502磁化方向长度h m /mm4~5.50.5轴心距o 2/mm33~351表3 V 形永磁体参数V 形参数范围步长单片宽度b m /mm 15~242磁化方向长度h m /mm4~70.5轴心距o 2/mm30~351 对在此范围内的所有不同组合进行参数化扫描仿真,并进行最优化求解,最优化算法采用默认的拟牛顿算法,它是求解非线性优化问题最有效的方法之一,收敛速度快㊂最优化求解的目标为ρ≥1.5,ξ≥0.5,由图2可以看出,理论上满足3倍的调速范围㊂经过Maxwell的最优化求解,可得出永磁体宽度㊁永磁体磁化方向长度和轴心距的初选结果㊂2.2.1 永磁体的尺寸确定经过分析和有限元软件的计算,可得到ρ和ξ随电机永磁体尺寸的参数变化规律㊂矩形永磁体和V 形永磁体的变化规律都是随着电机永磁体厚度和磁化方向的增加,ρ增加且ξ下降;永磁体宽度对两个参数的影响更明显,如图5㊁图6所示㊂(a)矩形永磁体电机(b)V 形永磁体电机图5 凸极率和弱磁率随永磁体宽度的变化(a)矩形永磁体电机(b)V 形永磁体电机图6 凸极率和弱磁率随永磁体磁化方向长度的变化两个优化参数变化趋势并不相同,在有限元优化求解给出的结果下,要想达到优化目标,并考虑制作工艺难度㊂最后确定矩形永磁体尺寸确定为宽42mm,厚4mm;V 形永磁体尺寸确定为单片永磁体宽20mm,厚4mm㊂2.2.2 永磁体的位置确定在永磁体尺寸确定的情况下,随着轴心距的增加,如图7所示,矩形永磁体电机的ρ会增加,ξ会下降;V 形永磁体电机的ρ和ξ呈相同变化规律,凸极率增加,弱磁率下降㊂(a)矩形永磁体电机(b)V 形永磁体电机图7 凸极率和弱磁率随轴心距的变化经过优化求解,矩形永磁体电机轴心距选择35mm;V 形永磁体电机轴心距选择33mm㊂V 形永磁体不仅要考虑轴心距,还要考虑永磁体旋转的角度θ对交直轴电感的影响㊂如图8所示,随着旋转角度的增加,凸极率上升,弱磁率下降,最终旋转角选择23°㊂图8 凸极率和弱磁率随旋转角度的变化3 电机参数分析与对比3.1 矩形永磁体电机在永磁体尺寸和位置确定之后,对电机模型进行有限元仿真,电机的直轴电感为0.074H,交轴电感为0.143H,磁链为0.608Wb,仿真得出凸极率为1.93,弱磁率为0.597,满足求解目标㊂ D设计分析esign and analysis 2021年第49卷第3期 程献会等 永磁同步电动机调速范围的优化及性能分析 20 对优化后的电机进行MATLAB仿真分析,采用基于最大转矩电流比的弱磁控制方式,控制框图如图9所示㊂在空载及负载条件下进行仿真分析,对比优化前后电机的调速范围,结果如表4㊁图10所示㊂可以看出,优化后空载条件下调速范围可以达到两倍以上,负载下调速范围也明显提高,达到了优化的目的㊂图9 弱磁控制框图表4 矩形永磁体电机最高转速对比转矩T/(N㊃m)优化前n f/(r㊃min-1)优化后n a/(r㊃min-1)仿真实验仿真020001900310010185018002400(a)空载下电机转速(b)负载下电机转速图10 矩形永磁体电机转速优化3.2 V形永磁体电机对确定永磁体位置和尺寸的电机模型进行有限元仿真,电机的直轴电感为0.073H,交轴电感为0.142H,磁链为0.635Wb,凸极率为1.96,弱磁率为0.56,满足求解要求㊂对优化后的V形永磁体电机,进行基于最大转矩电流比的弱磁调速控制下的空载及负载仿真,结果如表5所示㊂空载可以达到两倍左右的调速范围,负载下速度也有所提高,满足优化目标,如图11所示㊂表5 V形永磁体电机最高转速对比转矩T/(N㊃m)转速n/(r㊃min-1)优化前优化后022003000 1020002450(a)空载下电机转速(b)负载下电机转速图11 V形永磁体电机转速优化4 结 语本文借助有限元仿真软件,以内嵌式永磁同步电动机的调速范围为优化目标,讨论了矩形和V形永磁体不同尺寸和位置对电机参数的影响,结合对调速范围的影响,确定了电机永磁体的尺寸和位置,完成了电机的优化设计㊂以优化完成的电机尺寸,对其进行参数分析和对比,较之前的电机有了明显的转速范围的提升,达到了本次优化的目的㊂优化过程和结果对内嵌式永磁同步电动机的设计和参数提供了一定的参考㊂参考文献[1] 唐任远.现代永磁电机理论与设计[M].北京:机械工业出版社,2015.[2] 王秀和.永磁电机[M].北京:中国电力出版社,2011.[3] 贾金信,杨向宇,曹江华.基于田口法的内嵌式永磁电动机的优化设计[J].微电机,2013,46(6):1-4.[4] 王艾萌,温云.田口法在内置式永磁同步电机优化设计中的应用[J].华北电力大学学报(自然科学版),2016,43(3):39-44.[5] 陈晨.纯电动汽车用永磁同步电动机设计及弱磁扩速分析[D].天津:天津大学,2010.[6] 解志霖.电动大巴车用永磁电机设计[D].沈阳:沈阳工业大学,2017.[7] 郭殿林,陈康,包兵.电动汽车凸极式永磁同步电机弱磁调速的研究[J].煤矿机械,2016,37(7):58-60.[8] 皮秀,王善铭.弱磁调速的永磁同步电机参数的分析设计[J].中国科技论文在线,2010,5(8):585-591.[9] 孙慧芳,高琳,李计亮,等.弱磁调速用永磁同步电机设计分析[J].微电机,2010,43(12):16-20.[10] 高锋阳,齐晓东,李晓峰,等.部分分段Halbach永磁同步电机优化设计[J/OL].电工技术学报:1-14[2021-02-04].ht⁃tp:///10.19595/ki.1000-6753.tces.191554..[11] 李晓峰,高锋阳,齐晓东,等.对称V型异步起动永磁同步电机齿槽转矩优化[J/OL].电力系统及其自动化学报:1-9[2021-02-04]./10.19635/ki.csu-epsa.000497.[12] 刘晓宇,袁彬,戴太阳,等.基于自适应网格及响应面模型的永磁电机多目标优化[J].微特电机,2020,48(7):24-27,30.作者简介:程献会(1995 ),女,硕士研究生,研究方向为电机与电器㊂。
交流与直流电机-调速方法-分类-原理-优缺点-应用

交流与直流电机调速方法分类原理优缺点应用三相交流电机调速有哪些方法1 变极调速.2变频调速.3变转差率调速...三相交流电机有很多种。
1.普通三相鼠笼式。
这种电机只能通过变频器改变电源频率和电压调速(F/U)。
2.三相绕线式电机,可以通过改变串接在转子线圈上的电阻改变电机的机械特性达到调速的目的。
这种方式常用在吊车上。
长时间工作大功率的绕线式电机调速不用电阻串接,因为电阻会消耗大量的电能。
通常是串可控硅,通过控制可控硅的导通角控制电流。
相当于改变回路中的电阻达到同上效果。
转子的电能经可控硅组整流后,再逆变送回电网。
这种方式称为串级调速。
配上好的调速控制柜,据说可以和直流电机调速相比美。
3.多极电机。
这种电机有一组或多组绕组。
通过改变接在接线合中的绕组引线接法,改变电机极数调速。
最常见的4/2极电机用(角/双Y)接。
4.三相整流子电机。
这是一种很老式的调速电机,现在很用了。
这种电机结构复杂,它的转子和直流电机转子差不多,也有换向器,和电刷。
通过机械机构改变电刷相对位置,改变转子组绕组的电动势改变电流而调速。
这种电机用的是三相流电,但是,严格上来说,其实它是直流机。
原理是有点象串砺直流机。
5.滑差调速器。
这种方式其实不是改变电机转速。
而是改变和是电机轴相连的滑差离合器的离合度,改变离合器输出轴的转速来调速的。
还有如,硅油离合器,磁粉离合器,等等,一此离合机械装置和三相电机配套,用来调速的方式。
严格上来说不算是三相电机的调还方式。
但是很多教材常常把它们算作调速方式和一种。
直流电机的调速方法一是调节电枢电压,二是调节励磁电流,而常见的微型直流电机,其磁场都是固定的,不可调的永磁体,所以只好调节电枢电压,要说有那几种调节电枢电压方法,常用的一是可控硅调压法,再就是脉宽调制法(PWM)。
PWM的H型属于调压调速。
PWM的H桥只能实现大功率调速。
国内的超大功率调速还要依靠可控硅实现可控整流来实现直流电机的调压调速。
变频调速永磁同步电动机的设计

变频调速永磁同步电动机的设计随着科技的不断发展,变频调速技术日益成为工业领域中重要的节能技术之一。
变频调速技术通过改变电源频率,实现对电动机的速度控制。
在众多类型的电动机中,永磁同步电动机因其高效、节能、高精度控制等优点,逐渐得到广泛应用。
本文将探讨变频调速永磁同步电动机的设计方法。
变频调速技术主要通过改变电源频率来改变电动机的转速。
根据异步电动机的转速公式 n=f(1-s)/p,其中n为转速,f为电源频率,s为转差率,p为极对数,可知当f改变时,n也会相应改变。
变频调速技术具有调速范围广、精度高、节能等优点,被广泛应用于各种工业领域。
永磁同步电动机是一种利用永磁体产生磁场的高效电动机。
其特点如下:效率高:永磁同步电动机的磁场由永磁体产生,可降低铁损和额定负载下的铜损,从而提高效率。
节能:由于其高效率,永磁同步电动机在长期运行中可节省大量能源。
调速性能好:永磁同步电动机的转速与电源频率成正比,因此可通过变频调速技术实现对电动机的速度精确控制。
维护成本低:永磁同步电动机结构简单,故障率低,维护成本相对较低。
变频调速永磁同步电动机的设计原则是在满足额定负载要求的前提下,尽可能提高电动机效率,同时确保调速性能优越。
为此,设计时需考虑以下几个方面:(1)优化电磁设计:通过合理选择永磁体的尺寸和位置,以及优化定子绕组的设计,降低铁损和铜损。
(2)转子结构设计:保证转子的强度和稳定性,同时考虑散热问题,防止因转子故障导致电动机损坏。
(3)控制系统设计:选择合适的控制算法和硬件设施,实现对电动机速度的精确控制。
(1)明确设计需求:根据应用场景和负载要求,确定电动机的功率、转速、电压、电流等参数。
(2)选择合适的永磁材料:根据需求和市场供应情况,选择合适的永磁材料,如钕铁硼等。
(3)设计定子结构:根据电磁负荷要求,设计定子的槽数、绕组形式等结构参数。
(4)优化转子设计:根据强度和稳定性要求,设计转子的结构形式,选择合适的材料和加工工艺。
自动化基础试卷和答案

自考电机及拖动基础试题一、选择填空题(在每小题的备选答案中,选出正确答案,并将正确答案的序号填在题干的括号内。
每空1分,共30分)1.直流电机转子是由( )、( )、( )和( )等组成。
a.电枢铁心b.电刷c.主磁极d.换向极e.换向器f.电枢绕组g.转轴h.轴承i.机座2.直流电动机的电刷的功用是( )。
a.清除污垢b.引入直流电压、电流c.引出直流电压、电流d.引出交流电压3.直流电动机的电动势常数C e 是由( )和( )等决定的。
a.电源电压Ub.负载电阻R Lc.电枢串联电阻R add.极对数Pe.电枢表面导体数Nf.磁通Φ4.发电机的用途是将( )转换为( ),电动机的用途是将( )转换为( )。
a.机械能b.电能5.直流电动机的机械特性是指电动机( )与( )的关系。
a.转差率Sb.主磁通c.电机转速nd.电枢电流I ae.电磁转矩T emf.电源电压U6.他励直流电动机的理想空载转速n 0与( )成正比,与( )成反比。
a.ΦNb.T emc.U Nd.C Te.R af.Φ2N7.直流电动机的铁损是指电枢铁心的( )损耗和( )损耗。
a.电枢绕组b.摩擦损耗c.涡流d.磁滞e.电压损耗f.杂散损耗8.直流发电机的理论基础是( )定律。
a.基尔霍夫b.全电流c.电磁感应d.欧姆9.他励直流电动机的机械特性的转速降落Δn=)(RT em 。
a.C T Φ b.C e Φ c.C e C T Φ d.C e C T Φ210.凡是人为改变( )、( )及( )中的任何一个或几个,则得到他励直流电动机的人为机械特性。
a.Ub.Φc.R add.I ae.T emf.ng.C eh.C T11.减弱磁通时,他励直流电动机理想空载转速n 0( ),机械特性斜率β( )。
a.增加b.降低c.不变12.直流电动机的电磁转矩与电机转动方向一致时,电机处于( )运行状态。
a.制动b.发电c.电动13.变压器的额定容量用( )表示,单位为( )。
三相永磁同步电动机变频调速系统设计

三相永磁同步电动机变频调速系统设计运动控制系统课程设计题目:三相永磁同步电动机变频调速系统设计专业班级:自动化姓名:学号:指导教师:摘要本论文在研究永磁同步电动机运行原理的基础上详细讨论了其变频调速的理论而且设计了一套基于DSP的永磁同步电动机磁场定向矢量控制系统。
永磁同步电动机相对感应电动机来说具有体积小、效率高以及功率密度大等优点,因此自从上个世纪80年代,随着永磁材料性能价格比的不断提高,以及电力电子器件的进一步发展,永磁同步电动机的研究也进入了一个新的阶段。
由于永磁同步电动机自身具有比感应电动机更为优越的性能,而且其dq变换算法相对简单、电机转子磁极的位置易于检测,因此交流调速的矢量控制理论在永磁同步电动机的控制领域也得到了同样的重视,有关永磁同步电动机矢量控制研究的成果陆续发表。
本文就是应用电压矢量控制SVPWM实现对永磁同步电机的转矩控制,使其拥有直流电机的性能。
关键词:永磁同步电机矢量控制 dq变换 DSP目录1 绪论............................................................................................................. (1)1.1 研究背景与意义 (1)1.2 研究现状及应用前景 (1)2 永磁同步电机的矢量控制方法 (3)3 硬件电路设计 (4)3.1 电流检测电路 (4)3.2 转速检测和转子磁极位置检测电路 (5)3.3 PWM发生电路 (6)3.4 IPM智能功率模块驱动电路 (7)3.5 系统保护电路 (8)3.6 人机接口电路 (9)4 软件设计............................................................................................................. . (9)设计心得............................................................................................................. .. (12)参考文献............................................................................................................. .. (13)1 绪论1.1 研究背景与意义众所周知,电动机是以磁场为媒介进行机械能和电能相互转换的电磁装置。
永磁同步电机的调速控制研究与探讨

永磁同步电机的调速控制研究与探讨摘要:永磁同步电机相对于其它电机而言有着优异的性能,能够在石油、煤矿、大型工程机械等比较恶劣的工作环境下运行,这不仅加速了永磁同步电机取代其它电机的速度,同时也为永磁同步电机的发展提供了广阔的空间。
目前,永磁同步电机(PMSM)以其高功率密度、高性价比等独特优点受到国内外的普遍重视,因此,对永磁同步电机的调速控制研究具有非常重要的意义。
论文首先介绍了永磁同步电机的各种控制策略,接着分析了永磁同步电机的结构及其特点。
然后从矢量控制理论出发,重点分析了永磁同步电机的数学模型,并在此基础上,探讨了空间电压矢量控制方法。
关键词:调速控制系统;空间矢量控制;永磁同步电机1永磁同步电机的结构及其特点1.1永磁同步电机概述永磁同步电机的转子采用高性能的稀土永磁材料,使得电机尺寸减小;由于发热主体在定子侧,散热也比较容易;同时,其结构简单、效率和功率因素高及输出转矩大等特点,这些优点使得永磁同步交流伺服系统已成为现代伺服系统的主流,在很多驱动领域己经取代直流电机。
1.2永磁同步电机的结构永磁同步电机是用装有永磁体的转子取代绕线式同步电动机转子中的励磁绕组,从而省去了励磁线圈、滑环和电刷以电子换向器,实现无刷运行。
PMSM 的定子与绕线式同步电动机基本相同,要求输入定子的电流仍然是三相正弦的,所以称为三相永磁同步电机。
永磁同步电机的定子是电枢绕组,转子是永磁体。
就整体结构而言,永磁同步电机可以分为内转子和外转子式;就磁场方向来说,有径向和轴向磁场之分;就定子的结构而论,有分布绕组和集中绕组以及定子有槽和无槽的区别。
1.3永磁同步电机的特点虽然永磁同步电动机转子结构差别较大,但由于永磁材料的使用,永磁同步电机具有如下共同的特点:(1)、体积小、质量轻。
(2)、功率因数高、效率高,节约能源。
(3)、磁通密度高、动态响应快。
(4)、可靠性高。
(5)、具有严格的转速同步性和比较宽的调速范围。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
永磁同步电动机三种基本调速方法
永磁同步电动机是一种常用的高效率电动机,常用于工业生产中的带载设备。
为了实现电动机的调速,常用以下三种基本调速方法: 1. 电压调制法:该方法通过改变电动机的输入电压来实现调速。
可以通过改变变频器的输出电压来改变电动机的输出电压和频率,从而改变电动机的转速。
该方法的优点是控制简单,响应速度快,但是对于负载变化较大的情况下,调速效果可能不稳定。
2. 磁场调制法:该方法通过改变电动机内部的磁场强度来实现调速。
可以通过改变变频器的输出频率和相位,来改变电动机内部的磁场强度分布,从而改变电动机的转速。
该方法的优点是调速范围广,调速效果稳定,但是控制复杂度较高。
3. 直接转矩控制法:该方法通过直接控制电动机的转矩大小来实现调速。
可以通过改变变频器输出的电流大小和相位,来控制电动机的转矩大小,从而改变电动机的转速。
该方法的优点是调速响应速度快,调速效果稳定,但是对于负载变化较大的情况下,需要进行较为复杂的控制设计。
综上所述,不同的永磁同步电动机调速方法各有优缺点,需要根据实际应用情况选择合适的调速策略。
- 1 -。