交通灯proteus仿真设计
交通灯(proteus仿真设计+程序)

52单片机简易交通灯proteus仿真设计原理交通灯作为日常生活中必不可少的交通标志,它的设计是单片机初学者必不可少要接受的一项课题,下面简单介绍用proteus仿真一个由52单片机控制的简易交通灯。
本设计主要要求以下几个方面:一是根据系统控制要求设计硬件电路,这里是用PROTEUS软件来完成;二是根据硬件电路编写相应的程序流程图然后编写相关程序,这里程序的编制主要是用KeilC51软件来完成;三是在KEIL上用已经编好的程序生成.hex文件载入到PROTEUS中,实现PROTEUS与KEIL的联调,完成调试和仿真,观察调试结果是否满足设计要求,。
一:设计方案及重点:首先南北方向红灯、东西方向绿灯亮,南北方向红灯35秒、东西方向绿灯35秒,相应的数码管显示对应的数字并读秒,同时南北方向红色的交通灯和东西方向的绿色交通灯接通点亮显示,当东西方向的绿灯时间到,则东西方向的绿灯转为黄灯,同时数码管显示黄灯的时间3秒,东西方向的黄色二极管接通点亮,此时南北方向的红灯不变。
南北方向的红灯和东西方向的黄灯时间同时到,此时南北方向的红灯跳转为绿灯,时间同北方向的绿灯时间到,南北绿灯跳转为黄灯,东西方向的红灯不变,当南北方向的黄灯和东西方向的红灯时间到,南北方向的黄灯跳转为红灯,东西方向的红灯跳转为绿灯。
设计重点:1.数码显示管的计时2.数码管控制交通灯的转换3.锁存器与位选器端口的选择4.电路连接与程序编写二:仿真器件的介绍:1.单片机芯片:AT89C52, AT89C52是一个低电压,高性能CMOS 8位单片机, AT89C52单片机在电子行业中有着广泛的应用。
2.数码管:7SEG-MPX2-CC,这是一个两位数共阴极的数码管, 1就是左边数码管的阴极2就是右边数码管的阴极,a,b,c,d,e,f,g,就是数码管的段码,dp就是数码管的小数点3.锁存器与位选器:74HC573,具体作用:74HC573锁存器在数码管显示时作用的确是为了节省IO口,单片机P0口先发送abcdefghp段选信号,这时使用一个74HC573将段选信号保存住,单片机P0口再发送位选信号,此时单片机P0口信号不影响被锁存住的段选信号。
基于proteus的交通信号灯设计与仿真

宁波理工学院专业综合课程实习课程论文题目基于proteus的交通信号灯设计与仿真项目成员沈毅专业班级电气101指导教师裘君分院信息完成日期20013. 7.14目录一、题目及要求 ......................................1.1实验目的 ............................................1.2实验原理图 ..........................................二、软件设置 .............................................三、硬件原理图 ...........................................四、软件流程图 ...........................................五、设计结果(仿真+实物).................................5.1状态一...............................................5.2状态二...............................................5.2状态三...............................................5.2状态四...............................................六、个人心得 .............................................七、附件.................................................基于proteus的交通信号灯设计与仿真一、题目及要求实现一个如下基本功能的交通灯:按照常规我们假设一个十字路口为东西南北走向。
(完整word版)基于Proteus仿真交通灯

Proteus班级:电信13—2姓名:段学亮邓成智崔俊杰邓石磊陈亮高金玉成绩:电子与信息工程学院信息与通信工程系1.设计要求单片机的P3口的P3.0~P3。
7连接4×4矩阵键盘,P0口控制一只数码管,当4×4矩阵键盘中的某一按键按下时,数码管上显示对应的键号.例如,1号键按下时,数码管显示“1", 14号键按下时,数码管显示“E”等等.2.仿真电路图仿真电路图,如图一图1:4*4键盘控制数码管显示3。
仿真C51程序#include<reg52。
h>#define uchar unsigned char#define uint unsigned intsbit dula=P2^6;sbit wela=P2^7;uchar disnum,temp,key;void delay(uchar i){uchar j,k;for(j=0;j<i;j++)for(k=0;k〈200;k++);}uchar code table_du[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0x7f8,0x80,0x90,0x88,0x83,0xc6,0xa1,0x86,0x8e,0xff};void main(){disnum=16;wela=0;while(1){P3=0xf0;temp=P3;temp=temp&0xf0;if(temp!=0xf0){delay(10);if(temp!=0xf0){temp=P3;temp=temp|0x0f;P3=temp;key=P3;switch(key){case 0xee :disnum=0;break;case 0xde :disnum=1;break;case 0xbe : disnum=2;break;case 0x7e :disnum=3;break;case 0xed :disnum=4;break;case 0xdd : disnum=5;break;case 0xbd : disnum=6;break;case 0x7d :disnum=7;break;case 0xeb : disnum=8;break;case 0xdb : disnum=9;break;case 0xbb : disnum=10;break;case 0x7b :disnum=11;break;case 0xe7 : disnum=12;break;case 0xd7 :disnum=13;break;case 0xb7 :disnum=14;break;case 0x77 :disnum=15;break;}}}P0=table_du[disnum];}}3.电路图仿真效果当按下键盘时,所显示的效果如图3—1至图3—4图3—1:当按下K0键时,数码管显示数字‘0’图3—2:当按下K4键时,数码管显示数字‘4'图3—3:当按下K8键时,数码管显示数字‘8’图3—4:当按下KF键时,数码管显示数字‘F' 5.总结电路设计方面,根据书本上还是课堂上老师所讲的知识,很快设计出来此仿真电路。
基于Proteus的数字交通灯电路设计与实现
基于Proteus的数字交通灯电路设计与实现要基于Proteus进行数字交通灯电路的设计与实现,可以按照以下步骤进行操作:
1. 打开Proteus软件,创建一个新的工程。
2. 在工程中选择一个适当的微控制器模型,例如Arduino UNO。
3.在工程中选择一个合适的LED灯模型,用于表示交通灯的红、黄、绿三种状态。
4.将LED灯模型拖放到电路图中,并与微控制器的相应引脚连接。
5.在电路图中添加一个电阻,用于限流保护LED灯。
6. 编写Arduino程序代码,实现交通灯的控制逻辑。
例如,可以使用if语句和延时函数来控制LED灯的亮灭。
7. 将编写好的Arduino程序代码上传到微控制器中。
8.保存并仿真运行电路图,观察交通灯的工作状态。
9.可以通过更改程序代码中的延时时间和控制逻辑,来模拟不同的交通灯工作模式,如红绿灯交替、黄灯闪烁等。
完成以上步骤后,即可实现基于Proteus的数字交通灯电路设计与实现。
交通灯proteus仿真设计
交通灯proteus仿真设计交通灯是城市交通管理中非常重要的一部分,它们用于控制车辆和行人的流动,确保交通的安全和顺畅。
在这篇文章中,我们将使用Proteus软件来设计一个交通灯的仿真模型。
在Proteus中,我们可以使用ISIS和Ares两个模块进行电子电路的设计和仿真。
首先,我们需要在ISIS中创建一个新的电路图。
我们可以将交通灯的每个部分视为一个独立的电路,包括信号发生器、计时器、红绿灯和行人信号等。
首先,我们需要一个信号发生器来模拟交通灯的计时控制。
我们可以使用Proteus中提供的脉冲发生器来生成一个方波信号作为计时器的输入。
我们可以设置方波的频率和占空比来模拟不同的交通灯状态,比如红灯、绿灯和黄灯。
接下来,我们需要一个计时器来控制交通灯的转换。
我们可以使用Proteus中提供的计时器元件,比如555定时器。
我们可以设置定时器的参数,比如时钟频率和周期,来控制交通灯的转换时间。
然后,我们需要设计红绿灯的电路。
对于红灯,我们可以使用一个LED来表示,可以选择红色的LED。
对于绿灯,我们也可以使用一个LED来表示,可以选择绿色的LED。
我们可以使用Proteus中提供的LED元件,并将其连接到计时器的输出引脚上。
最后,我们还可以添加一个行人信号来模拟行人通过的情况。
我们可以使用一个LED来表示行人信号,可以选择白色的LED。
我们可以将行人信号的LED连接到计时器的输出引脚上,并设置适当的延迟来控制行人信号的亮灭。
完成电路设计后,我们可以在ISIS中进行仿真。
在仿真过程中,我们可以观察交通灯的状态和行人信号的变化。
通过调整计时器的参数,我们可以模拟不同的交通灯时间间隔和行人信号的延迟时间。
除了电路设计和仿真,Proteus还可以进行PCB布局和打印板设计。
我们可以使用Ares模块来创建一个真实的交通灯电路板,并将其制作成实际的交通灯。
总而言之,通过Proteus软件的使用,我们可以方便地设计和仿真交通灯的电路,并进行交通灯的时间间隔和行人信号的延迟的调整。
基于Proteus的智能交通灯的仿真设计
摘要本智能交通灯系统的设计主要是利用单片机和C语言完成共同来完成。
首先,系统采用红、黄、绿两组共六个LED发光二极管模拟十字路口东西和南北两个方向的交通信号灯,配有7SEG-MPX6-CC(六位八段共阴极数码管)数码构成倒计时牌,其的控制核心为AT89C51芯片。
其次,系统具有处理紧急情况的功能,可以使东西和南北双向红灯,禁止普通车辆通行。
最后,系统利用Proteus软件进行了软、硬件的的仿真。
关键词:AT89C51单片机倒计时牌中断数码管目录毕业设计任务书 (I)中文摘要............................................................................................... .II 1 引言. (1)1.1设计目的及意义 (1)1.2设计的内容 (1)2 设计原理 (2)2.1总体设计方案 (2)2.2硬件设计原理 (2)2.2.1硬件原理图 (2)2.2.2主要模块电路 (3)2.2.2.1控制核心——AT89C51单片机芯片 (3)2.2.2.2 LED数码管显示 (6)2.2.2.3六路交通灯的模拟 (8)2.2.2.4其它电路 (8)2.3 软件设计原理 (9)2.3.1软件流程图 (9)2.3.1.1主流程图 (9)2.3.1.2主要子程序流程图 (10)2.3.2软件源程序 (11)3 基于Proteus的仿真调试及排故 (11)3.1 Proteus的仿真软件的介绍 (11)3.2 主要调试过程 (11)3.2.1硬件测试 (12)3.2.2软件调试 (12)3.2.3连调 (12)3.3调试时出现的问题及解决方法 (12)4 结论 (14)致谢 (15)附录 (16)附录1 硬件连接图 (16)附录2 源程序 (17)附录3 共阴极LED数码管字段码表 (21)参考文献 (22)1 引言1.1 设计目的及意义交通是一个城市经济的命脉,它不但体现了一个城市的发展活力,也直接与老百姓的生活息息相关。
基于Proteus的智能交通灯的仿真设计

基于Proteus的智能交通灯的仿真设计智能交通灯是一种基于现代科技的交通管理设备,通过智能化的控制系统和传感器,能够根据交通流量和道路情况,自动调整交通信号灯的时间和模式,以提高交通效率和安全性。
Proteus是一种功能强大的电子设计自动化(EDA)软件,它可以用于电路仿真和PCB设计。
在智能交通灯的仿真设计中,Proteus可以帮助我们建立交通信号灯的电路模型,并模拟不同情况下的交通流量和信号控制策略。
首先,我们需要设计交通信号灯的电路模型。
在Proteus中,我们可以使用元件库中的数字逻辑元件和LED元件来构建交通信号灯的电路。
通过连接适当的电源和控制信号,我们可以模拟交通信号灯的工作状态。
接下来,我们可以使用Proteus的仿真功能来模拟不同情况下的交通流量和信号控制策略。
通过设置不同的输入信号和参数,我们可以观察交通信号灯在不同条件下的工作效果。
比如,我们可以模拟高峰时段和低峰时段的交通流量,观察交通信号灯的调整情况以及车辆通过的效率。
在仿真设计中,我们还可以使用Proteus的调试功能来分析交通信号灯的电路和控制逻辑。
通过设置断点和监视变量,我们可以观察电路中各个信号的变化情况,以及控制逻辑的执行过程。
这有助于我们发现潜在的问题并进行调整和改进。
除了仿真设计,Proteus还可以用于PCB设计和实际制造。
通过将电路设计转化为PCB布局,我们可以将交通信号灯的电路制作成实际的电子板,并安装在实际的交通信号灯中进行测试和调试。
总之,基于Proteus的智能交通灯的仿真设计可以帮助我们模拟不同情况下的交通流量和信号控制策略,并分析交通信号灯的电路和控制逻辑。
这有助于我们优化交通信号灯的设计,提高交通效率和安全性。
同时,Proteus还可以用于PCB设计和实际制造,使我们的设计能够实际应用于交通管理中。
基于Proteus的智能交通灯设计与仿真实现

基于Proteus的智能交通灯设计与仿真实现智能交通灯是一种通过传感器和智能控制系统实现交通信号灯的智能化管理,能够根据交通流量和道路状况进行智能调控,以提高交通效率和减少交通堵塞。
本文将基于Proteus软件进行智能交通灯的设计和仿真实现。
首先,我们需要明确智能交通灯的基本功能和设计要求。
智能交通灯主要需要实现以下功能:1.根据交通流量进行智能控制。
通过传感器检测道路上的交通流量,智能交通灯可以根据实时的交通情况智能地调整信号灯的时间,以提高交通效率。
2.考虑不同道路的优先级。
在交叉路口附近,智能交通灯需要根据不同道路的优先级来调整信号灯的时间,以确保交通的顺畅和安全。
3.考虑行人的过马路需求。
智能交通灯需要合理地安排行人的过马路时间,以保证行人的安全和顺畅。
接下来,我们将使用Proteus软件进行智能交通灯的设计和仿真实现。
Proteus是一款电子电路设计和仿真软件,可以用来模拟和验证电子电路的性能和功能。
首先,我们需要设计智能交通灯的硬件电路。
在Proteus中,我们可以使用元器件库中的LED灯和开关等元件来构建交通灯的电路。
同时,我们还需要添加传感器来检测交通流量和行人的需求。
在设计电路的过程中,我们需要考虑不同道路的优先级和行人的过马路需求。
根据道路的优先级,我们可以设置不同道路对应的信号灯的亮灭时间。
同时,我们还可以设置传感器来检测行人的需求,以在需要的时候提供行人过马路的时间。
完成电路设计后,我们可以使用Proteus中的仿真功能来验证电路的性能和功能。
在仿真过程中,可以模拟不同道路的交通流量和行人的过马路需求,以观察交通灯是否能够根据实时情况进行智能调控。
在仿真过程中,我们可以观察交通灯的状态变化和信号灯的亮灭时间,以评估交通灯的性能和效果。
如果发现问题,我们可以对电路进行调整和优化,以提升交通灯的智能化管理能力。
总结起来,基于Proteus的智能交通灯设计和仿真实现是一种高效且可靠的方法。
十字路口交通灯Proteus仿真

《微机原理与接口技术》课程设计报告题目:十字路口交通灯设计学院:信息工程学院专业:通信工程目录1、摘要 (1)2、硬件电路图 (2)3、AT89C51功能介绍 (3)4、交通灯程序设计思路 (5)5、交通灯运行流程图 (6)6、源代码函数说明 (6)7、交通灯设置红绿灯时间结果图 (8)8、心得与体会 (9)9、源程序代码 (10)摘要十字道口的红绿灯是交通法规的无声命令,是司机和行人的行为准则。
十字道口的交通红绿灯控制是保证交通安全和道路畅通的关键。
当前,国内大多数城市正在采用“自动”红绿交通灯,它具有固定的“红灯—绿灯”转换间隔,并自动切换。
它们一般由“通行与禁止时间控制显示、红黄绿三色信号灯和方向指示灯”三部分组成。
通常,生活中常见的红绿灯控制为,红灯六十秒,绿灯四十五秒,黄灯三秒等,因道路,车辆,城市交通规划而异,此次,基于proteus仿真十字路口的交通灯控制系统,设定南北方向绿灯15秒,黄灯5s,东西方向绿灯10s,黄灯5s。
系统基于MSC-51系列单片机89C51为中心器件来设计交通灯,显示器件为LED 红绿灯,LCD数码管。
采用c51编程,简单易懂,将功能模块化,除了可以实现红绿灯按要求变化,还通过proteus里的按钮,设置了键盘函数,可以按要求调整红绿灯亮的时间,并且还有重置(初始化)按钮。
一.功能概述1.设计任务:交通灯的硬件设计和软件设计2.设计目的:(1).初步了解和认识51单片机的工作原理,引脚图。
(2).掌握单片机相关接口技术和相关外围芯片的特性。
( 3 ).通过实际的设计程序,查找资料,调试程序,熟悉keil和proteus软件仿真,理解并熟悉模块化程序设计方法和调试。
3.基本要求:利用单片机的定时器产生秒信号,控制十字路口的红、绿、黄灯交替点亮和熄灭,并且用 4 只LED 数码管显示十字路口两个方向的剩余时间。
当东西方向亮绿灯时,南北方向红灯亮起;反之,如果南北方向亮绿灯,同时东西方向亮绿灯;绿灯亮时车辆行驶,红灯亮时车辆停止。
基于proteus智能交通灯的设计与实现

基于proteus智能交通灯的设计与实现智能交通灯作为现代城市道路交通管理中不可少的一部分,它的出现为我们的出行提供了安全保障、加强了路面交通流量控制、节约了交通资源等多方面的好处。
而其中一个较为重要的一环就是基于Proteus的智能交通灯的设计与实现。
对于基于Proteus智能交通灯的设计与实现,我们需要先了解它的原理与构成。
智能交通灯主要由红、黄、绿三种颜色的LED灯组成,可以根据解编程的控制器自动控制交通灯的信号灯状态,实现智能化控制交通。
具体来说,它需要用到Proteus中的LED、ATmega8微处理器和IC 74138解码器等元器件。
整个系统是由ATmega8控制器作为系统的核心,进行主控制。
当信号机工作时,ATmega8控制器便开始运作,通过仿真调制智能交通灯性能,确保系统电路稳定性和其性能的可靠性。
其中,LED元器件负责实现红、黄、绿三种颜色的信号灯。
而IC74138解码器则用来对输入的十进制代码进行解码,使得LED灯逐一亮起,完成交通灯状态的转换。
在实际上述基本原理的基础上,我们可以开始基于Proteus的智能交通灯的设计与实现。
设计依据的是流水灯的思路,将红、黄、绿LED的三种信号灯依次亮起,实现智能交通灯的变色。
设计时需要考虑到多个要素,如红灯的时长、绿灯的时长、每个状态时显示的LED灯的亮度、如何处理多组交通灯之间的协调联系。
同时,还需要在传感器的协助下,构建一个系统反应灵敏、控制精准的智能交通灯。
总体而言,基于Proteus的智能交通灯的设计与实现,要求我们结合实际需要,考虑到诸多因素。
这样,才能设计出安全可靠、实用对象、人性化、高效稳定的智能交通灯方案。
在实现过程中,我们必须深入了解相关的原理,逐一检验系统性能及其稳定性与可靠性,以确保交通灯的正常运行,为社会提供更加安全和便捷的出行保障。
protues仿真单片机模拟交通灯
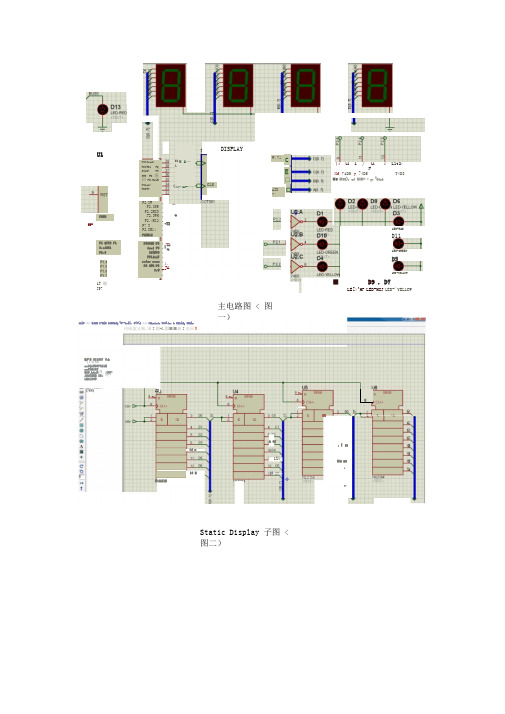
U1JI-P5ENP1 QTT2 P11.ri2E^P1,3AT 朋C57CLKDISPLAYp—I T-IrI4POXJrtf*PDJWD1 FQ2TAD7 PO3W3 PD堀回PD.SflMPO&tf®PDIWTP2.IWP2.1M9P2.2MIOF2.3WHP2.4M12P? 3P2.CM14P2JM15P3OTXD P3imci P3IflNTOP3^iinTps^mo pssmP3 &WR P3T.WDllM &—工_JAW.7]AID7|cE□主电路图 < 图一)\7u^T / u^~7 Llt2:FXf 7iD5 y ?4D5 T4D3■3 ■TE>;cj ■■- • =:a iiriLED-R6DD11LED-GREEND5LED-TELLOW■D9 . D7LE[>^H F LED-MI J L ED-'YEL L CW Lil* 血疔EjLH I-MlE IfaUifk F3""bpll. £<V<d 蚀曲^ihrirjr T4£|jv;h Eftldk [falpUS;| [UL13 M 13内瓯蛍乂嗅.国I関#1図■■曲I也回NFT10EJ-J OF^CE? T±勺:辰咖rse&tDMOFGftMruSlMiECMOS hg=K扯•JC-iSflEEh ID:吨•LK^LUCWid m■4LE1M& CJ1U£\Static Display 子图 <图二)H■2 H5h Alias S! P| Lj GEHCtSML E 驷・8H NU1M EE 7UEA-IBE12LZT4HEEA1LZDHLDUX^rTLLCTA 11 BJI Mt 1■_XTi^U町和耳】Pidffi Pi.iffiE Knanvja rt ix/iru»D2 Pt-J*&3 PllftCfl P ■曲" P».T«TP3-0M?PJ.iJwO P2JM10 P2-3W11P J JW 2P]Jtav3F2.®ri> r: misPl.T 他 F3 J.T4TEF3 W4T1 ra^rrt pjpn FIr/WR FITfflD ;LEb-VELL^W■封厂」LED-DRE£T4UEQ ■怔 LLW亡 LED-s&LQWD7LE 口■江LLOW> DHcfl.m 匚tp.ii匚口 MI 嶼?]> i 嘲?i匚-■廿 ” 厂厂厂I 厂厂[l 厂B | Ql 匕函訂“til ./用[通皈I 而冏许」UEliri 仿真效果 < 图三)-k.」!:」 □ 11POACH) PO1JAO I'IP0JAO2J4_KTM.2PQ^A OS POJKWG PO.TWJTPE a期 Pi IW9上 RETF^EN ALE 賦筮 叩筑1? Pj.grtiM F"i 丁間 31-PLornPli.liTSEK Ffl.ZPfl.3 F1.4 Pii.5 Pi.& PP.J P3(WWDP3imfT M.SfTiSTATIC DISPLAYT L .TXID*9R F2LED-iSHE&JlECLOfiEEKLEO-^LLOWD11LE&-TEU.OWD3±U211 ■ r- MP2J2.仿真效果 <图四)U2:FT*MLf^fiepD10Utmor*DTUD-YELlOWATSocsaPDCWDD即IWD1*>0 2wD2PDHAD3 PDJJMUPD?yAD5PDaWbF■工问F2 3U11P2IWI2瑰坏iP;俯!i PZTJW15P3 2IMT0psiimTpjjmP3$/Ti 阳良两P3T.^I J^TATlg DISPLAYC(0 J)GCTCQIAU«:A D3111074 LED-VELLiJrt'LEOOREENLEC-VELLDWUEOflEDDIOP2P2■詐■j J■ KF71■打F2(:<yCID ?|匚3© 口EEND4仿真效果 < 图五)U2;FTiUiD6LED-YELLQWLEOAEO□ 11-*-3- mw.1FO.aV*DDP0.1WD1PC.2WD2FO3UW33FD.iMDiRD.5MD5P«| 阿HRQTJADJP^M蚱EAF2.W*£P?.HM0PMW1Pj^lAlSFZ5W13FJ.G.WUP?TJM5pi.cmPl.«iT2£KPIN piaPl.4P1.-5PI .6PlftTlKDPl.i™ PI.ains P33flMT1F14TDF3.STIPST-iJC7STATICDISPLAY:C> ------ <_ > DhDflJ.T]口HP flEH CF瑞仿真效果 < 图六)汇编语言程序:SEC0ND1 EQU 30HSEC0ND2 EQU 31HDBUF EQU 40HTEMP EQU 44HLED_G1 BIT P2.1LED Y1 BIT P2.。
基于Proteus的交通灯模拟演示系统设计
基于Proteus的交通灯模拟演示系统设计摘要交通问题日益严重,我们需要设计一个合理的交通智能控制系统,这样就能够很有效的缓解交通拥堵现象。
值得一提的是,十字路口是城市交通的关键,是制约城市道路畅通的关键因素。
因此对交通信号灯的深入研究具有相当重大的意义。
本文根据实际生活中观测到的信号灯运转规律,对交通灯的控制系统进行了初步的研究,并设计了一个基于Proteus的交通灯模拟演示系统。
关键词交通灯;51单片机;Proteus仿真引言如今微控技术是在不停地改进和完善,单片机的深入应用是必然的发展趋势,这势必引起传统控制技术的根本性变革。
单片机设计交通系统改变传统的僵化、简单的交通系统,通过数据的多渠道采集,利用CPU对数据的处理加工,然后反馈给道路警察或出行者来实现道路交通的合理运行。
在整个城市交通控制系统的组成部分中,单片机的控制系统是不可或缺的一部分。
1 系统设计方案1.1 交通灯模拟系统的控制要求本系统的控制核心为AT89C51单片机[1-2],采用共阴极数码管显示倒计时。
同时,系统利用AT89C51单片机的P1、P2口控制交通信号灯显示,用keil C51编译程序。
本系统在加载编写的程序后,可以正确给出交通信号灯,数码管也可以正常显示倒计时,并具有强大的扩展功能,在紧急或特殊情况时,南北和东西方向可同时显示红灯,让特殊车辆优先通过,并及时倒计时显示。
假设道路的十字路口是东西南北的走向,一开始我们设定东西方向为红灯,南北方向为绿灯,在30s后南北方向转为黄灯亮3s,同时人行道转红灯。
在南北黄灯3s后东西方向转为绿灯,南北方向转为红灯,接着30s后东西方向黄灯转亮3s,同时人行道转红灯,之后依次循环。
当有紧急的或者特殊的情况出现时,东西南北方向同时显示红灯。
1.2 智能交通灯设计框图本设计用AT89C51完成对整个交通灯系统流程的智能控制及功能的调用,当外部有中断到来能及时地调用相应的子程序,当要实现对车流量的检测时(本设计未设计此功能)可以根据I/O口送来的数据进行运算分析、做出相应处理。
单片机proteus仿真设计交通灯(汇编语言)
课程设计成果说明书题目:城市交道口交通灯控制系统姓名:学号:学院:班级:指导教师:年月日一、任务:设计并制作一个城市交道口交通灯控制糸统二、要求:根据下图交道口模型,装上交通灯。
交道口模型如图所示。
交通灯控制规则如下:1)每个街口有左拐、右拐、直行及行人四种指示灯。
每个灯有红、绿两种颜色。
自行车与汽车共用左拐、右拐和直行灯。
2)共有四种通行方式:①车辆南北直行、各路右拐,南北向行人通行。
南北向通行时间为1分钟,各路右拐比直行滞后10秒钟开放。
②南北向左拐、各路右拐,行人禁行。
通行时间为1分钟。
③东西向直行、各路右拐,东西向行人通行。
东西向通行时间为1分钟,各路右拐比直行滞后10秒钟开放。
④东西向左拐、各路右拐。
行人禁行。
通行时间为1分钟。
3)在通行结束前10秒钟,绿灯闪烁直至结束。
1, 基本部分:按照上述控制要求,用发光二极管代替交通灯,用PROTEUS绘制电路图,并仿真调试实现之。
2, 发挥部分: 1.有倒计时时间显示。
2若交道口出现紧急情况,交警可将糸统设置成手动:全路口车辆禁行、行人通行。
紧急情况结束后再转成自动状态。
3当有119、120等特种车辆通过时,糸统自动转为特种车放行,其它车辆禁止状态。
特种车辆通过15秒钟后,糸统自动恢复,用模型车演示。
4其它自选措施。
城市交道口交通灯控制系统1.系统功能的确定功能一:可以实现红绿灯的转换以及控制路口的基本功能。
功能二:有倒计时功能和最后十秒绿灯闪烁的功能。
功能三:出现紧急情况时,可以警察手动控制特殊状态,并维持交通。
功能四:119或120等特种车经过时,可转换成为特种车道行驶状态,并在情况消除后15秒,恢复原状。
2.方案论证2.1方案一:如下图所示,为proteus仿真图。
其中,P1,P0端口的8位分别来控制东西,南北方向的红绿灯。
且运用了4个74LS164的8位移位寄存器(串行输入,并行输出)来控制4个LED的数码显示,通过AT89C51单片机的P3.0,P3.1两个扩展端口来接4个并行连接的74LS164的DIN和CLK两个端口来显示倒计时的功能,这会产生乱码使得显示杂乱,而主程序以顺序执行为主,其中穿插着对P3.7的端口高低电平的测试和跳转语句来实现功能三,并且功能一、二在主程序中实现,没有功能四的的实现程序。
基于proteus智能交通灯的设计与实现

基于proteus智能交通灯的设计与实现随着城市人口的不断增加和交通工具的普及,交通拥堵和交通事故越来越常见。
为了缓解这种情况,改善道路交通状况,保障行人和车辆的安全,交通灯的作用愈发重要。
然而,传统的交通灯存在一些不足之处,例如没有考虑到不同时间段和交通流量的变化等,无法满足大城市交通管理的需求。
因此,需要一种基于智能化技术的交通灯设计,以更好地优化道路交通流量。
本文将介绍一种基于Proteus的智能交通灯设计方案。
1.智能交通灯方案概述智能交通灯是一种基于计算机技术,通过交通信号控制点来优化交通流量的系统。
智能交通灯通过计算机和传感器来检测和调节交通流量,通过分析交通数据并根据预设算法计算,实现调度智能化控制,从而降低交通拥堵和交通事故的发生率。
2.智能交通灯的设计步骤智能交通灯的设计要按照以下步骤进行:2.1 系统需求分析首先要了解智能交通灯的基本需求,包括减少拥堵,优化交通流量,提高交通效率,保障行人和车辆的安全等。
需要根据实际交通情况和需求进行系统设计。
2.2 系统功能设计确定系统的基本功能,包括交通实时数据采集、交通流量分析、信号控制等。
为此需要选择合适的传感器、计算机控制器、交通灯等硬件设备,同时需开发相应的软件来实现系统功能。
2.3 系统硬件设计在开发系统前,需要进行硬件设计,确保系统硬件设备的适配性和可靠性。
硬件设计需要考虑各种因素,包括系统的功耗、专用芯片选择、模块排布等。
2.4 系统软件设计在硬件设计完成后,需要进行软件设计。
通过软件实现交通实时数据采集、交通流量分析和信号控制等功能,为后续交通灯运行提供指导。
2.5 系统测试和优化对系统进行测试,检验系统在实际运行中的性能和稳定性,找出问题并进行优化,在确保系统符合需求的情况下投入实际应用。
3.智能交通灯的运行流程智能交通灯的运行流程主要包括实时数据采集、数据处理、数据分析和信号控制四个阶段。
3.1 实时数据采集系统通过传感器采集交通实时数据,包括车辆的车速、车流量等信息。
基于proteus的单片机控制模拟交通灯的设计

基于proteus的单片机控制模拟交通灯的设计交通灯是城市交通管理中不可或缺的一部分,它能够控制交通流动,确保交通安全。
在这个设计中,我们将使用Proteus软件来模拟交通灯的控制。
首先,我们需要选择一个适合的单片机来控制交通灯。
在这个设计中,我们选择了常用的AT89C51单片机。
AT89C51是一款8位微控制器,具有强大的功能和广泛的应用范围。
接下来,我们需要连接单片机和交通灯。
我们将交通灯的红、黄、绿三个灯分别连接到单片机的三个输出引脚上,用于控制灯的亮灭。
此外,我们还需要连接一个按钮到单片机的输入引脚上,用于模拟行人过马路时的信号。
在Proteus软件中,我们可以使用元件库中提供的交通灯和按钮模拟器来完成这个设计。
我们将交通灯的灯泡分别连接到单片机的输出引脚上,将按钮连接到单片机的输入引脚上。
接下来,我们需要编写单片机的控制程序。
在这个设计中,我们需要实现交通灯的循环控制和行人信号的模拟。
我们可以使用C语言来编写程序,并使用Keil C51编译器将程序烧录到单片机中。
在程序中,我们可以使用定时器和中断来实现交通灯的循环控制。
我们可以设置一个定时器来定时切换交通灯的状态,例如每隔10秒切换一次。
当定时器中断发生时,我们可以在中断服务程序中切换交通灯的状态。
此外,我们还需要实现行人信号的模拟。
当按钮按下时,我们可以通过检测输入引脚的状态来触发行人信号。
当行人信号触发时,我们可以通过改变交通灯的状态来实现停车。
在Proteus软件中,我们可以使用仿真功能来验证我们的设计。
我们可以设置仿真参数,例如定时器的定时周期和按钮按下的时机,然后运行仿真,观察交通灯的状态和行人信号的模拟效果。
通过这个设计,我们可以学习到如何使用Proteus软件来模拟交通灯的控制,同时也能够加深对单片机的理解和应用。
交通灯的设计是一个典型的嵌入式系统应用,通过这个设计,我们可以锻炼自己的嵌入式系统开发能力。
proteus8086交通灯课程设计

proteus 8086 交通灯课程设计一、课程目标知识目标:1. 学生能理解8086微处理器的结构与工作原理,掌握其指令集和编程方法。
2. 学生能掌握交通灯系统的基本原理,理解状态转换逻辑。
3. 学生能运用Proteus软件进行电路设计与仿真,实现8086微处理器控制下的交通灯系统。
技能目标:1. 学生能够运用汇编语言编写程序,实现对交通灯系统的控制逻辑。
2. 学生能够利用Proteus软件进行电路搭建、调试与仿真,解决实际问题。
3. 学生能够通过课程学习,培养动手实践能力和团队协作能力。
情感态度价值观目标:1. 学生在学习过程中,培养对微处理器和电子设计的兴趣,激发创新意识。
2. 学生能够认识到科技在生活中的应用,增强社会责任感。
3. 学生能够通过课程学习,养成严谨、细致、勇于探索的科学态度。
课程性质:本课程为电子技术实践课程,以8086微处理器为核心,结合交通灯系统,培养学生动手实践和创新能力。
学生特点:学生具备一定的电子技术基础和编程能力,对实际操作和项目设计具有较高兴趣。
教学要求:教师应注重理论与实践相结合,引导学生通过实际操作,掌握知识技能,培养情感态度价值观。
在教学过程中,关注学生的个体差异,提供有针对性的指导。
二、教学内容本课程教学内容分为三个部分:第一部分:8086微处理器基础1. 理解8086微处理器的内部结构、工作原理及指令集。
2. 学习汇编语言编程,掌握基本指令的使用和程序设计方法。
3. 分析交通灯系统的工作原理,理解状态转换逻辑。
第二部分:Proteus软件操作与电路设计1. 学习Proteus软件的基本操作,掌握电路图绘制、元件选择与布局。
2. 利用Proteus软件进行8086微处理器及其外围电路的搭建。
3. 学习仿真调试方法,掌握电路功能的验证与优化。
第三部分:交通灯控制系统设计与实现1. 根据交通灯系统需求,编写汇编语言程序,实现状态控制逻辑。
2. 将编写好的程序导入Proteus,与电路图进行联合仿真。
基于Protues的十字路口交通灯模拟实验仿真
2总体方案设计
2.1系统模拟交通灯的控制要求
控制要求:在十字路口,每条道路各有两组红、黄、绿灯用来指挥车辆和行人的有序通行,保障车辆和行人安全通过。
假定十字路口交通灯的初始运行状态为东西绿灯南北红灯。表1中是十字路口红绿灯的六种运行状态方案。运行时从状态一到状态六依次执行,最后由状态六转换到状态一,实现循环动作。
关键词:Proteus仿真;51单片机;交通灯系统
中图分类号:TH-3文献标识码:A
Proteus simulationexperimentof crossroads traffic lights
Abstract:In order to satisfythe demand of thecityroadtransportationmanagement,improve the operation efficiency of urban traffic,and design atraffic control systemby SingleChipMicrocomputer.By using Proteus simulation platform,explains thedesign ofcrossroadstraffic lightscontrol systemwhichbased on 51SingleChipMicrocomputer, andunitingwith the Keil C51.It has completed software debugging,hardware testing and system debugging.From theviewof the experimental simulation, test the reliability of thecrossroadstraffic light control system,enhancethe development efficiency, reduce the design cost, combinethetheoryof SingleChipMicrocomputerwith practice, anddeepen the understanding of the technology.
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
52单片机简易交通灯proteus仿真设计原理交通灯作为日常生活中必不可少的交通标志,它的设计是单片机初学者必不可少要接受的一项课题,下面简单介绍用proteus仿真一个由52单片机控制的简易交通灯。
本设计主要要求以下几个方面:一是根据系统控制要求设计硬件电路,这里是用PROTEU软件来完成;二是根据硬件电路编写相应的程序流程图然后编写相关程序,这里程序的编制主要是用KeilC51软件来完成;三是在KEIL上用已经编好的程序生成.hex文件载入到PROTEU中,实现PROTEU与KEIL的联调,完成调试和仿真,观察调试结果是否满足设计要求,。
一:设计方案及重点:首先南北方向红灯、东西方向绿灯亮,南北方向红灯35秒、东西方向绿灯35秒,相应的数码管显示对应的数字并读秒,同时南北方向红色的交通灯和东西方向的绿色交通灯接通点亮显示,当东西方向的绿灯时间到,则东西方向的绿灯转为黄灯,同时数码管显示黄灯的时间3秒,东西方向的黄色二极管接通点亮,此时南北方向的红灯不变。
南北方向的红灯和东西方向的黄灯时间同时到,此时南北方向的红灯跳转为绿灯,时间同北方向的绿灯时间到,南北绿灯跳转为黄灯,东西方向的红灯不变,当南北方向的黄灯和东西方向的红灯时间到,南北方向的黄灯跳转为红灯,东西方向的红灯跳转为绿灯。
设计重点:1.数码显示管的计时2.数码管控制交通灯的转换3.锁存器与位选器端口的选择4.电路连接与程序编写二:仿真器件的介绍:1.单片机芯片:AT89C52, AT89C52是一个低电压,高性能CMOS 8位单片机,AT89C52单片机在电子行业中有着广泛的应用。
2.数码管:7SEG-MPX2-CC,这是一个两位数共阴极的数码管,1 就是左边数码管的阴极2就是右边数码管的阴极,a,b,c,d,e,f,g就是数码管的段码,dp就是数码管的小数点3.锁存器与位选器:74HC573,具体作用:74HC573锁存器在数码管显示时作用的确是为了节省IO 口,单片机P0 口先发送abcdefghp段选信号,这时使用一个74HC573将段选信号保存住,单片机P0 口再发送位选信号,此时单片机P0 口信号不影响被锁存住的段选信号。
,使用另一个74HC573锁存住位选信号。
按以上循环,显示8 位数码管只需要10个IO 口。
4.上拉电阻:RESPACK-8,作用,拉高端口电压,稳定端口电压值。
5.交通灯:TRAFFIC LIGHTS。
三.设计原理概述:|1.设计采用52单片机系统,AT89C52片内含8k bytes的可反复擦写的Flash只读程序存储器和256 bytes的随机存取数据存储器(RAM ),器件采用ATMEL公司的高密度、非易失性存储技术生产,兼容标准MCS-51指令系统,片内置通用8位中央处理器和Flash存储单元相较于51芯片而言,52芯片储存能力较强大,易于读取,性能明显优于51芯片。
2.本设计采用二位八段数码管,并用U2做位选,选择数码管亮的位置,连接p2 口,U3做段选,选择数码管如何亮。
位选器U2与段选器U3控制数码管的显示,辅以程序来控制数码管的倒计时显示。
3.交通灯用共阳式接法,接至单片机P1.2-P1.4端口。
低点位输出时,交通灯被点亮,高电位输出时,交通灯被熄灭。
同时用程序语言来达到数码管控制交通灯的点亮与熄灭。
上拉电阻般作单键触发使用时,如果电路本身没有内接电阻,为了使单键维持在不被触发的状态或是触发后回到原状态,必须在电路外部另接一电阻。
此处采用上拉电阻的作用就是为了使电路更加稳定。
四•程序语言的编写与keil调试:程序的编写及注释见附录一:在keil中建好工程后实现C语言程序的编译与调试,最终生成拓展名为.hex的文件。
五. 仿真元器件的连接与程序的导入:电路连接如附录二图一所示:|元器件连好后,将程序文件导入,执行结果如图一所示:六. 小组小结:智能交通灯的proteus仿真设计不仅考察设计者对电路性质的掌握,更要求设计者对单片机性质的了解(比如上拉电阻的使用)和对元器件应用的了解(数码管的位选与段选)。
51和52单片机只是单片机中最基本的系统芯片,做好这个简易交通灯的proteus仿真设计只是一个初步的开始,还有更多更艰难的后续工作要做。
2015年1月6日星期二附录一:#in clude<reg52.h>#defi ne uchar un sig ned char#defi ne uint un sig ned intsbit dula=P2A6。
sbit wela=P2A7。
uchar code table[]={ 〃对数码管显示的数字进行编号0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71}。
uchar num=35,num1=1,num2,num3,num4=35,num5=3,shi,ge。
void delay(uint)。
void display(uchar,uchar)。
main() {TMOD=0x11 。
为工作方式 1TH0=(65536-45872)/256 。
TL0=(65536-45872)%256 。
TH1=(65536-45872)/256 。
TL1=(65536-45872)%256 。
EA=1。
ET0=1。
时器0 中断ET1=1。
TR0=1。
定时器0TR1=1。
P1=0x04。
while(1){ display(shi,ge) 。
}}void display(uchar shi,uchar ge){P0=table[shi] 。
dula=1。
dula=0。
P0=0xfe。
wela=1 。
wela=0 。
delay(5) 。
P0=0xff 。
wela=1 。
wela=0 。
P0=table[ge] 。
dula=1。
dula=0。
P0=0xfd 。
wela=1 。
wela=0 。
delay(5) 。
P0=0xff 。
wela=1 。
wela=0 。
}void delay(uint x) //延时函数{uint i,j 。
for(i=x 。
i>0。
i--)//设置定时器0//开总中断// 开定// 启动//程序在此扫描等待间断发生//执行数码管段位选函数// 将十位作为段选数据输送//送位选数据//进行消影操作//将个位作为段选数据输送//送位选数据//进行消影操作}void T0_time() interrupt 1 //数码管间断{TH0=(65536-45872)/256 。
TL0=(65536-45872)%256 。
num2++ 。
if(num2==20)// 循环20 次位为一秒,在将num2 置零后重记下一秒{num2=0 。
num--。
if(num==0){num=35 。
num1++ 。
if(num1%2==0) num=3。
}// 如果num1 被 2 整除,则轮到黄灯亮,num 置成 3 shi=num/10 。
// 程序将十位个位传回ge=num%10。
}}void T1_time() interrupt 3 //交通灯间断{TH1=(65536-45872)/256 。
TL1=(65536-45872)%256 。
num3++ 。
if(num3==20)// 循环20 次位为一秒,在将num3 置零后重记下一秒{num3=0 。
num4-- 。
if(num4==0){num4=35 。
num5++ 。
if(num5%2==0) {num4=3 。
P1=0x08。
} //达到条件,黄灯亮if((num5+1)%4==0) P1=0x04 。
// 达到条件,红灯亮if((num5-1)%4==0) P1=0x10 。
// 达到条件,绿灯亮}}}附录二:Fik Edie Vlrw Tro Devgn Drtmg Library Tcrnplgiv Sjntt'm H«4p;D^H^ 奋卫回■制 1 团二 Q回点| * 十笔包禺包^Qa^lSSOHH ^S?/ W : • '' £屋 SchamBliG C-acMurv x图一|卜 || ■ |\ 11 Messao... AHlMATlHG 00336603000 申农d 孫琦■42DO.O*47000 Lh信阳师范学院因伦实验室52单片机简易交通灯proteu仿真设计原。