matlab实现puma机器人工作空间
使用MATLAB进行机器人运动规划和控制

使用MATLAB进行机器人运动规划和控制机器人技术的快速发展使得其在工业生产、服务业和医疗领域的应用越来越广泛。
而机器人的运动规划和控制是实现机器人动作精准、高效的关键技术之一。
而MATLAB作为一种功能强大的科学计算软件,其在机器人运动规划和控制方面的应用也越来越受到关注。
一、机器人运动规划机器人运动规划是指确定机器人在空间中如何从起始点移动到目标点的过程。
它包括路径规划和轨迹规划两个部分。
路径规划是确定机器人从起始点到目标点的最佳路径,常用的算法有A*算法、Dijkstra算法和RRT算法等。
这些算法通过考虑机器人在动作空间中的约束条件,寻找路径的优化解。
轨迹规划是在路径规划的基础上确定机器人沿路径的具体运动轨迹。
根据机器人运动的特性和任务要求,常用的轨迹规划算法有样条曲线插值法、贝塞尔曲线和LSPB曲线等。
在MATLAB中,可以利用Robotics System Toolbox实现机器人的路径规划和轨迹规划。
该工具箱提供了丰富的函数和工具,使得机器人路径规划和轨迹规划的实现变得简单而高效。
例如,我们可以首先定义机器人的运动属性和约束条件,然后使用路径规划算法在给定的环境中寻找最佳路径。
接着,利用轨迹规划算法得到机器人沿路径的具体轨迹,最后将轨迹转化为机器人可识别的运动指令,使机器人按照规划的路径运动。
二、机器人运动控制机器人运动控制是指将机器人按照规划的路径和轨迹进行精确控制的过程。
它包括动力学建模、控制算法设计和控制器实现等步骤。
动力学建模是指建立机器人运动学和动力学方程的过程。
通过对机器人的结构和运动进行建模,可以推导出描述机器人运动的数学方程,为后续的控制算法设计提供基础。
控制算法设计是根据机器人的动力学模型,设计合适的控制算法来实现对机器人运动的精确控制。
常用的控制算法有PID控制、模型预测控制(MPC)和自适应控制等。
这些算法可以根据机器人的运动误差和反馈信号进行自适应调整,实现对机器人运动的闭环控制。
基于MATLAB的PUMA560机器人运动学仿真

1 P U M A 5 6 0 机器人参数设计
1 . 1连杆参数和坐标系
一
究。 开式运动链一端固定在基座上 , 另一端不固定 , 利用末端 执 行器 来操纵物体 以完成各种任 务。 驱动器使关节运动 , 并带 动
连杆运动, 使手爪到达所规定的位姿。 轨 迹 规 划 的过 程 中, 重 点研 究 操作 臂 末 端执 行 器 相 对
从数据 曲线或数 据本 身难以分析出来 的许 多重 要信息, 还 可以 从图形上看到机器人在一定控制条件下的运动规律 。 一个新 的 机 器人 工作程序 编制完成后, 先在仿真软件中观 察运行 结果, 分析检验轨 迹规 划和作业规划 的正确性和合 理性 , 为离线编程 依据给定的连杆坐标系, 相关的连杆参数可规定如下: 1 ) a 为沿 i 轴, 从z 移动至z 的距 离。
自由度 的P U M A 5 6 0 机 器人 进行 参 数 设 然 后 讨 论 了正、 逆 运 动 机器人 操作臂运 动学方程的研究 内容 , 为操作 臂各个连 杆 学算法 , 轨 迹规划 问题 , 最 后在M A T L A B 环境下, 运 用机器人工 间的位移关系、 速度 关系及加速度关 系。 连杆通过移动或转 动 具箱编制简单的程 序语句 , 快速完成了机器人 的运动学仿真 。 关节 串联形成机器人操作臂, 可 以作为一个 开式运动链进行研
实验研究 ・
基于MA T L A B的P UMA5 6 0 机器人运动学仿真
董慧颖 梁 爽( 沈阳 理工 大学, 辽 宁 沈阳 1 1 0 0 5 9 )
摘 要: 随着机器人技术的发展和应用, 机器人在现代 工业生产中扮演着越来越重要的角色。 机器人诞生是科学技术与社会进步的必然 结果 , 从根 本 上 改变 了 原来传 统的生产体 系和生产 方式 。 本 文在 M A T L A B  ̄境 下, 对P U M A 5 6 0 机 器人 进行 参 数设计, 分 析P U M A 5 6 0 机 器人 的运
如何在Matlab中进行机器人路径规划与运动控制

如何在Matlab中进行机器人路径规划与运动控制如何在 Matlab 中进行机器人路径规划与运动控制机器人技术在现代工业自动化和服务行业中起着重要的作用。
机器人的路径规划和运动控制是机器人系统中至关重要的组成部分。
在本文中,我们将讨论如何使用 Matlab 实现机器人路径规划和运动控制。
1. 引言机器人路径规划是指确定机器人从起始位置到目标位置的最佳轨迹的过程。
运动控制是指控制机器人在规划路径上的运动,包括速度控制、加速度控制和姿态控制等。
路径规划和运动控制的有效实现对提高机器人系统的性能和安全性至关重要。
2. 机器人的建模在进行路径规划和运动控制之前,首先需要对机器人进行建模。
这可以通过使用 Matlab 中的 Robotics System Toolbox 来实现。
Robotic System Toolbox 提供了用于建立机器人模型的功能,包括模型导入、碰撞检测和可视化等。
3. 机器人路径规划机器人路径规划可以分为离线规划和在线规划两种方式。
离线规划是在不考虑环境变化的情况下,通过预先生成的地图来计算最优路径。
Matlab 中的 Robotics System Toolbox 提供了一系列路径规划算法,如 A*、Dijkstra 和 RRT 等。
用户可以根据具体情况选择适合的路径规划算法来实现。
4. 机器人运动控制机器人运动控制是指控制机器人按照路径规划的轨迹进行运动的过程。
在Matlab 中,可以使用 Robotics System Toolbox 提供的运动控制工具箱来实现。
运动控制工具箱包括速度控制、加速度控制和姿态控制等功能,用户可以根据自己的需求选择合适的控制策略。
5. 环境感知和碰撞检测在机器人路径规划和运动控制过程中,准确地感知环境和检测碰撞是至关重要的。
Matlab 提供了一系列传感器模型和碰撞检测算法,可以用于实现环境感知和碰撞检测功能。
用户可以根据机器人系统的具体需求选择合适的传感器模型和碰撞检测算法。
基于matlab的机器人工作空间求解方法
基于matlab的机器人工作空间求解方法机器人工作空间求解的基础是在一个多维空间中根据机器人臂的坐标、参数以及机器人的运动范围,利用数学等方法,找到机器人在给定范围内可实现执行任务的最优解。
一、基本概念:1、机器人工作空间:机器人工作空间指机器人多轴运动系统运动范围,是一个包括机器人参数、机器人操作范围、机器人运动路径等信息的高维空间,主要用于研究和分析机器人的运动学和动力学行为。
2、机器人运动学:机器人运动学主要研究机器人的坐标、参数以及运动范围,包括机器人位置及速度计算,运动路径规划,以及主轴等可控制的量的变化,这些工作需要对机器人参数进行精确建模和仿真,避免机器人工作空间中发生危险或无法完成任务的情况。
二、matlab工具及其原理:在机器人工作空间求解过程中,matlab软件包可以提供专业的解决方案,以实现机器人运动学计算、路径规划以及仿真等任务。
1、 matlab机器人工作空间求解主要分两步:三、matlab机器人工作空间求解的具体步骤:1、配置环境:确保安装matlab软件的环境即R14以上的版本,配置完成后运行matlab中的Robot;2、建立参数文件:建立参数文件是按照机器人运动参数和机器人参数建立相应的参数文件,使用matlab绘制参数曲线,并建立多个机器人支撑工作空间的视图;3、绘制工作空间:可以借助matlab的绘图工具对机器人的工作空间进行绘图,根据绘制的坐标和图形观察机器人的工作空间,采用matlab编程语言根据工作范围编写EOI求解算法;4、机器人求解:调用matlab命令,根据编写的程序和EOI求解算法,实现机器人工作空间的求解,根据求解出来的解决方案,对如何控制机器人采取最佳运动轨迹、最佳控制机器人的参数进行调整;5、机器人运行:最后,将求解出来的具体方案和机器人的参数设置,调用matlab的求解器运行在机器人中,实现最佳的机器人运动路径。
四、机器人工作空间求解的应用:1、机器人运动学计算:运用机器人工作空间求解可以确定和控制机器人的行走路线和速度,防止机器人发生碰撞,以达到间隔定位,做到准确规划机器人的移动轨迹;。
通过MATLAB实现PUMA260机器人建模和运动分析
通过MATLAB实现PUMA260机器人建模和运动分析摘要:针对PUMA260机器人,分析它的正运动学、逆运动学的问题。
采用标准D-H法对机器人建立6个关节的坐标系并获取D-H参数,并用MATLAB编程建立其运动的数学模型,同时实现正运动学、逆运动学求解和轨迹规划的仿真。
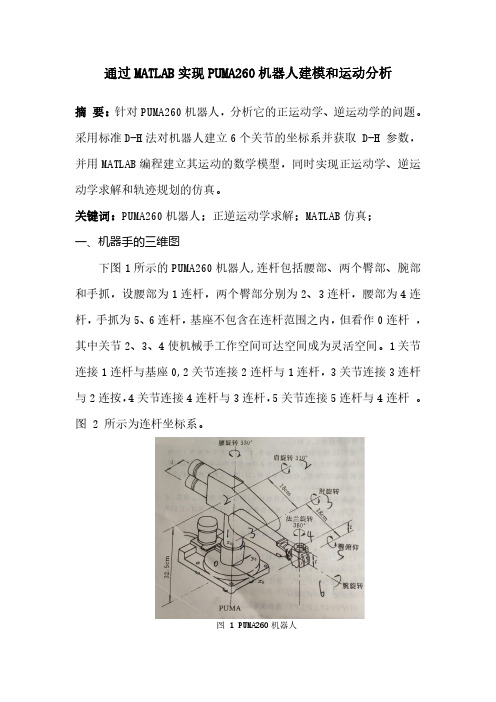
关键词:PUMA260机器人;正逆运动学求解;MATLAB仿真;一、机器手的三维图下图1所示的PUMA260机器人,连杆包括腰部、两个臀部、腕部和手抓,设腰部为1连杆,两个臀部分别为2、3连杆,腰部为4连杆,手抓为5、6连杆,基座不包含在连杆范围之内,但看作0连杆,其中关节2、3、4使机械手工作空间可达空间成为灵活空间。
1关节连接1连杆与基座0,2关节连接2连杆与1连杆,3关节连接3连杆与2连按,4关节连接4连杆与3连杆,5关节连接5连杆与4连杆。
图2所示为连杆坐标系。
图1PUMA260机器人二、建立连杆直角坐标系。
图2连杆直角坐标系三、根据坐标系确定D-H 表。
D-H 参数表四、利用MATLAB 编程求机械手仿真图。
clc;clear;%标准D-H 法建立机器人模型L1=Link([pi/20000],'standard');L2=Link([000-pi/20],'standard');L3=Link([0-101800],'standard');L4=Link([-pi/2018-pi/20],'standard');L5=Link([-pi/200-pi/20],'standard');L6=Link([000-pi/20],'standard');%将机器人命名为“ROBOT PUMA260”并用SerialLink 函数创建机器人bot=SerialLink([L1L2L3L4L5L6],'name','ROBOT PUMA260');bot.plot([000000]);连杆i θi di ai ɑi 运动范围190°32.500°-165~165°20°00-90°-105~105°30°L=-10180°-130~130°4-90°018-90°-180~180°5-90°00-90°-90~90°60°t=0-90°-165~165°图3PUMA260机器人运动仿真(起始位置时)%PUMA260机械手从Q1位置运动到Q2位置t=[0:0.01:1];%设定Q1位置参数和Q2位置参数Q1=[000000];Q2=[-pi/40pi/40-pi/40];%运用jtraj函数计算Q1、Q2点间的空间轨迹[q,qd,qdd]=jtraj(Q1,Q2,t);plot(bot,q);图4PUMA260机器人运动仿真(终止位置时)四、求PUMA260运动学正解和逆解。
基于MATLAB的PUMA机器人运动仿真研究

基于MATLAB的PUMA机器人运动仿真研究
基于MATLAB的PUMA机器人运动仿真研究摘要:机器人运动学是机器人学的一个重要分支,是实现机器人运动控制的基础。
论文以D-H坐标系理论为基础对PUMA560机器人进行了参数设计,利用MATLAB机器人工具箱,对机器人的正运动学、逆运动学、轨迹规划进行了仿真。
Matlab仿真结果说明了所设计的参数的正确性,能够达到预定的目标。
关键词:机器人PUMA560 D-H坐标系运动学轨迹规划
机器人运动学的研究涉及大量的数学运算,计算工作相当繁锁。
因此,采用一些工具软件对其分析可大大提高工作效率,增加研究的灵活性和可操作性。
对机器人进行图形仿真,可以将机器人仿真的结果以图形的形式表示出来,从而直观地显示出机器人的运动情况,得到从数据曲线或数据本身难以分析出来的许多重要信息,还可以从图形上看到机器人在一定控制条件下的运动规律[1]。
论文首先设计了PUMA560机器人的各连杆参数,然后讨论了正、逆运动学算法,轨迹规划问题,最后在MATLAB环境下,运用Robotics Toolbox,编制简单的程序语句,快速完成了机器人得运动学仿真。
设机械手起始位置位于A点,qA=[000000],即表示机器人的各关节都处于零位置处。
机械手在B点和C点相对于基坐标系的位姿可用齐次变换矩阵TB和TC来表示。
图2所示为机械手臂在A点时的三维图形。
matlab机器人工具箱工作空间边界曲线提取
matlab机器人工具箱工作空间边界曲线提取
MATLAB机器人工具箱为机器人仿真和分析提供了一套完整的解决方案。
若要在MATLAB中使用机器人工具箱来提取工作空间边界曲线,您需要进行以下步骤:
1.导入机器人模型:首先,您需要将机器人模型导入到MATLAB中。
这通常
涉及使用robotics.loadRobot函数来加载机器人描述文件。
2.设置工作空间:定义机器人的工作空间。
这通常是一个三维的欧几里得空
间,其范围定义了机器人的最大移动范围。
3.生成轨迹:使用MATLAB中的轨迹规划工具(例如
robotics.TrajectoryGenerator)生成机器人的轨迹。
这些轨迹描述了机器人从起始点到目标点的运动。
4.碰撞检测:使用工具箱中的碰撞检测功能,您可以确定哪些轨迹点或路径
与环境中的障碍物相交或接近相交。
5.提取边界曲线:基于碰撞检测的结果,您可以提取出机器人的工作空间边
界曲线。
这些曲线通常代表机器人在工作空间中移动时可能遇到的障碍物
边界。
6.可视化结果:使用MATLAB的绘图功能,您可以将提取的边界曲线可视
化,以便更好地理解机器人的工作空间限制。
具体的代码实现将取决于您的具体需求和机器人工具箱的版本。
如果您需要更详细的代码示例或帮助,建议查阅MATLAB机器人工具箱的官方文档或相关的技术论坛。
利用matlab建立简单的机器人模型的步骤

='hithdrobot';
drivebot(hithd)%驱动机器人模型生成
L{2}=link([0 431.8 0 149.09 0]);
L{3}=link([pi/2 0 0 0 0]);
L{4}=link([-pi/2 0 0 433.07 0]);
L{5}=link([pi/2 0 0 0 0]);
L{6}=link([0 0 0 56.25 0]);
hithd=robot(L,'hithdrobot');%建立机器人模型
5 生成机器人模型后,通过手动输入各个连杆转角模型会自动运动到相应位置,同时生成机器人末端的x,y,z坐标值
6 验证,通过机器人的运动方程,已知各个连杆转角的值计算出机器人末端x,y,z的值,与第5步的值进行对比,相同则验证模型正确。
例: PUMAຫໍສະໝຸດ 60机器人模型(待验证): L{1}=link([-pi/2 0 0 0 0]);
机器人模型的建立
1 先画出模型,指定义好机器人的初始位置
2 确定每个轴的坐标系
3 确定D-H参数
4 根据D-H参数,利用matlab中Link函数建立机器人模型,
Link函数的调用格式:
l=link(【连杆扭角-α 连杆长度-a 连杆转角-θ 连杆距离-d 0-表示为旋转关节】)
对于在matlab中的robotics工具箱几个指令的使用文档

机器人PUMA560 的MATLAB 仿真要建立PUMA560 的机器人对象,首先我们要了解PUMA560 的D-H 参数,之后我们可以利用Robotics Toolbox 工具箱中的link 和robot 函数来建立PUMA560 的机器人对象。
其中link 函数的调用格式:L = LINK([alpha A theta D])L =LINK([alpha A theta D sigma])L =LINK([alpha A theta D sigma offset])L =LINK([alpha A theta D], CONVENTION)L =LINK([alpha A theta D sigma], CONVENTION)L =LINK([alpha A theta D sigma offset], CONVENTION)参数CONVENTION 可以取‘standard’和‘modified’,其中‘standard’代表采用标准的D-H 参数,‘modified’代表采用改进的D-H 参数。
参数‘alpha’代表扭转角,参数‘A’代表杆件长度,参数‘theta’代表关节角,参数‘D’代表横距,参数‘sigma’代表关节类型:0 代表旋转关节,非0 代表移动关节。
另外LINK 还有一些数据域:LINK.alpha %返回扭转角LINK.A %返回杆件长度LINK.theta %返回关节角LINK.D %返回横距LINK.sigma %返回关节类型LINK.RP %返回‘R’(旋转)或‘P’(移动)LINK.mdh %若为标准D-H 参数返回0,否则返回1LINK.offset %返回关节变量偏移LINK.qlim %返回关节变量的上下限[min max]LINK.islimit(q) %如果关节变量超限,返回-1, 0, +1LINK.I %返回一个3×3 对称惯性矩阵LINK.m %返回关节质量LINK.r %返回3×1 的关节齿轮向量LINK.G %返回齿轮的传动比LINK.Jm %返回电机惯性LINK.B %返回粘性摩擦LINK.Tc %返回库仑摩擦LINK.dh return legacy DH rowLINK.dyn return legacy DYN row其中robot 函数的调用格式:ROBOT %创建一个空的机器人对象ROBOT(robot) %创建robot 的一个副本ROBOT(robot, LINK) %用LINK 来创建新机器人对象来代替robotROBOT(LINK, ...) %用LINK 来创建一个机器人对象ROBOT(DH, ...) %用D-H 矩阵来创建一个机器人对象ROBOT(DYN, ...) %用DYN 矩阵来创建一个机器人对象利用MATLAB 中Robotics Toolbox 工具箱中的transl、rotx、roty 和rotz 可以实现用齐次变换矩阵表示平移变换和旋转变换。
使用Matlab进行机器人控制的方法
使用Matlab进行机器人控制的方法引言:机器人的广泛应用给自动化生产和服务业带来了巨大的推动力。
而机器人的控制系统则起到了决定性的作用。
本文将介绍如何使用Matlab进行机器人控制,并探讨其中的方法与技巧。
一、Matlab在机器人控制中的作用Matlab是一种强大的数学建模与仿真软件。
它提供了丰富的工具箱和函数库,方便用户进行算法开发和系统模拟。
在机器人控制领域,Matlab具有以下几个重要作用:1. 运动学模型的求解机器人的运动学描述了机器人各个关节之间的几何关系和运动规律。
通过利用Matlab提供的符号计算工具,可以方便地求解机器人的正逆运动学模型,并生成相应的数学表达式。
2. 动力学模型的建立机器人的动力学描述了机器人在力学作用下的运动规律。
通过使用Matlab的数值计算工具,可以根据机器人的几何参数和质量分布等信息,建立机器人的动力学模型,并模拟机器人在不同条件下的运动响应。
3. 控制算法的开发在机器人控制中,控制算法是核心部分。
Matlab提供了丰富的控制工具箱,包括PID控制、模糊逻辑控制、自适应控制等,可以帮助用户快速开发和调试控制算法。
二、机器人控制的方法和技巧在使用Matlab进行机器人控制时,有一些方法和技巧可以提高效率和准确度。
下面将介绍几个常用的方法和技巧。
1. 仿真模型的建立在进行机器人控制系统设计之前,通常需要根据机器人的几何参数、动力学参数等信息,建立一个仿真模型,用于验证和优化控制算法。
Matlab提供了Simulink 工具,可以直观地搭建机器人的仿真环境,并通过观察仿真结果来分析和改进控制策略。
2. 控制器设计与调试在进行控制器设计时,可以先使用Matlab进行离线仿真,将机器人的控制系统与仿真模型进行连接,验证控制算法的正确性和性能。
然后可以使用Matlab的硬件接口工具箱,在实际物理机器人上进行在线测试和调试。
通过与真实环境的交互,可以快速找出控制系统中的问题,并进行修正和优化。
puma560机械臂matlab建模仿真(知识参考)
一、安装Robotics Toolbox for MATLAB1、下载该工具箱:迅雷搜狗下载2、将压缩包解压到一个文件夹下面3、打开MATLAB,在File菜单下选择Set Path,打开如下对话框4、单击“Add With SubFolder”,选择上面的工具箱5、点击“Save”,然后点击“Close”。
这样就把工具箱的路径添加到MATLAB的路径中了,也就是工具箱安装了。
PUMA560的MATLAB仿真要建立PUMA560的机器人对象,首先我们要了解PUMA560的D-H参数,之后我们可以利用Robotics Toolbox工具箱中的link和robot函数来建立PUMA560的机器人对象。
其中link函数的调用格式:L = LINK([alpha A theta D])L =LINK([alpha A theta D sigma])L =LINK([alpha A theta D sigma offset])L =LINK([alpha A theta D], CONVENTION)L =LINK([alpha A theta D sigma], CONVENTION)L =LINK([alpha A theta D sigma offset], CONVENTION)参数CONVENTION可以取‘standard’和‘modified’,其中‘standard’代表采用标准的D-H参数,‘modified’代表采用改进的D-H参数。
参数‘alpha’代表扭转角,参数‘A’代表杆件长度,参数‘theta’代表关节角,参数‘D’代表横距,参数‘sigma’代表关节类型:0代表旋转关节,非0代表移动关节。
另外LINK还有一些数据域:LINK.alpha %返回扭转角LINK.A %返回杆件长度LINK.theta %返回关节角LINK.D %返回横距LINK.sigma %返回关节类型LINK.RP %返回‘R’(旋转)或‘P’(移动)LINK.mdh %若为标准D-H参数返回0,否则返回1LINK.offset %返回关节变量偏移LINK.qlim %返回关节变量的上下限[min max]LINK.islimit(q) %如果关节变量超限,返回-1, 0, +1LINK.I %返回一个3×3 对称惯性矩阵LINK.m %返回关节质量LINK.r %返回3×1的关节齿轮向量LINK.G %返回齿轮的传动比LINK.Jm %返回电机惯性LINK.B %返回粘性摩擦LINK.Tc %返回库仑摩擦LINK.dh return legacy DH rowLINK.dyn return legacy DYN row其中robot函数的调用格式:ROBOT %创建一个空的机器人对象ROBOT(robot) %创建robot的一个副本ROBOT(robot, LINK) %用LINK来创建新机器人对象来代替robotROBOT(LINK, ...) %用LINK来创建一个机器人对象ROBOT(DH, ...) %用D-H矩阵来创建一个机器人对象ROBOT(DYN, ...) %用DYN矩阵来创建一个机器人对象利用MATLAB中Robotics Toolbox工具箱中的transl、rotx、roty和rotz可以实现用齐次变换矩阵表示平移变换和旋转变换。
基于Matlab对于PUMA560机器人的运动空间分析研究

基于Matlab对于PUMA560机器人的运动空间分析研究沙漠;邓子龙【摘要】通过建立PUMA560机器人空间坐标系并确定连杆参数,利用D-H方法建立了运动学模型,在考虑每个连杆参数边界条件的基础上对其运动学方程求解,利用Robotics Toolbox模块对机器人运动进行了仿真,并利用MATLAB生成机器人工作空间图像,通过图像得到不同步长对于工作空间范围和密度的影响;通过对机器人工作空间及运动轨迹的分析,求得机器人杆长对其工作空间的影响系数,利用MATLAB对不同步长的工作空间范围及密度进行仿真、比较.结果可知:机器人的工作空间是由一近似的椭圆体构成,步长越小,密度与工作空间的精准度越高.为机器人的误差分析和结构优化设计提供理论依据,为机器人的动态控制以及机器人结构的动态特性研究奠定基础.【期刊名称】《机械制造与自动化》【年(卷),期】2016(045)002【总页数】5页(P156-159,183)【关键词】机器人;运动学;工作空间【作者】沙漠;邓子龙【作者单位】辽宁石油化工大学机械工程学院,辽宁抚顺113001;辽宁石油化工大学机械工程学院,辽宁抚顺113001【正文语种】中文【中图分类】TP241近年来,机器人技术在军事、航空航天、工农业生产及医疗等领域迅猛发展。
机器人按技术层次可以分为:固定程序控制机器人、示教再现机器人和智能机器人等。
目前机器人研究涉及到机构学、运动学、控制技术、传感技术等领域[1]。
由于机器人的研究涉及到庞大数学运算,计算工作繁琐复杂,常利用一些工具软件来提高对其分析的工作效率,并且可以增加运算的灵活性和准确性。
现利用MATLAB软件通用性好、计算绘图功能强大等特点,对PUMA560机器人的操作进行运动空间及轨迹的仿真分析得到相关图像数据,以便为实际操作和运算提供参考。
PUMA560机械人末端工作空间代表了机械手的活动范围,是表示机器人工作运动灵活性的一个非常重要指标。
MATLAB在机器人控制中的使用教程

MATLAB在机器人控制中的使用教程导言:机器人控制是现代工业和科研中的重要领域。
MATLAB作为一种强大的计算工具,提供了丰富的功能和工具箱,可以在机器人控制中发挥重要作用。
本文将介绍MATLAB在机器人控制中的使用教程,并深入探讨其中的关键概念和技术。
一、MATLAB中的机器人建模1. 机器人建模的概念和意义在机器人控制中,建模是实现各种控制算法的基础。
机器人建模的目的是将机器人的动力学特性抽象为数学模型,以方便控制算法的开发和仿真验证。
MATLAB提供了机器人工具箱(Robotics Toolbox),其中包括了常见的机器人模型和动力学模型,方便用户进行建模和分析。
2. 刚体变换和坐标系机器人建模中重要的概念之一是刚体变换和坐标系。
刚体变换描述了一个物体在三维空间中的平移和旋转,它们的组合可以描述机器人的末端执行器在空间中的位置和姿态。
MATLAB中的Homogeneous Transformations(齐次变换矩阵)提供了一种便捷的方式来表示刚体变换和坐标系之间的关系。
3. 建模示例以一个简单的二自由度机械臂为例,介绍如何在MATLAB中建立机器人模型。
首先,需要定义机器人的连接方式和几何结构,包括关节类型、关节限制等。
然后,根据机械结构确定机器人的运动学方程和动力学方程。
最后,结合机器人工具箱提供的函数,可以快速地生成机器人模型,并进行运动学和动力学分析。
二、MATLAB中的机器人控制1. 机器人运动学分析机器人运动学是研究机器人运动和位置的学科,是机器人控制的重要组成部分。
MATLAB提供了丰富的运动学函数和工具箱,可以帮助用户进行机器人的正向和逆向运动学分析。
通过正向运动学,可以根据给定的关节角度计算出末端执行器的位置和姿态。
通过逆向运动学,可以根据给定的末端执行器的位置和姿态计算出关节角度。
2. 机器人轨迹规划与插补轨迹规划是指在给定起始点和目标点的情况下,生成机器人的轨迹,使得机器人在指定时间内平稳地从起始点运动到目标点。
puma560机械臂matlab建模仿真

一、安装Robotics Toolbox for MATLAB1、下载该工具箱:迅雷搜狗下载2、将压缩包解压到一个文件夹下面3、打开MATLAB,在File菜单下选择Set Path,打开如下对话框4、单击“Add With SubFolder”,选择上面的工具箱5、点击“Save”,然后点击“Close”。
这样就把工具箱的路径添加到MATLAB的路径中了,也就是工具箱安装了。
PUMA560的MATLAB仿真要建立PUMA560的机器人对象,首先我们要了解PUMA560的D-H参数,之后我们可以利用Robotics Toolbox工具箱中的link和robot函数来建立PUMA560的机器人对象。
其中link函数的调用格式:L = LINK([alpha A theta D])L =LINK([alpha A theta D sigma])L =LINK([alpha A theta D sigma offset])L =LINK([alpha A theta D], CONVENTION)L =LINK([alpha A theta D sigma], CONVENTION)L =LINK([alpha A theta D sigma offset], CONVENTION)参数CONVENTION可以取‘standard’和‘modified’,其中‘standard’代表采用标准的D-H参数,‘modified’代表采用改进的D-H参数。
参数‘alpha’代表扭转角,参数‘A’代表杆件长度,参数‘theta’代表关节角,参数‘D’代表横距,参数‘sigma’代表关节类型:0代表旋转关节,非0代表移动关节。
另外LINK还有一些数据域:LINK.alpha %返回扭转角LINK.A %返回杆件长度LINK.theta %返回关节角LINK.D %返回横距LINK.sigma %返回关节类型LINK.RP %返回‘R’(旋转)或‘P’(移动)LINK.mdh %若为标准D-H参数返回0,否则返回1LINK.offset %返回关节变量偏移LINK.qlim %返回关节变量的上下限[min max]LINK.islimit(q) %如果关节变量超限,返回-1, 0, +1LINK.I %返回一个3×3 对称惯性矩阵LINK.m %返回关节质量LINK.r %返回3×1的关节齿轮向量LINK.G %返回齿轮的传动比LINK.Jm %返回电机惯性LINK.B %返回粘性摩擦LINK.Tc %返回库仑摩擦LINK.dh return legacy DH rowLINK.dyn return legacy DYN row其中robot函数的调用格式:ROBOT %创建一个空的机器人对象ROBOT(robot) %创建robot的一个副本ROBOT(robot, LINK) %用LINK来创建新机器人对象来代替robotROBOT(LINK, ...) %用LINK来创建一个机器人对象ROBOT(DH, ...) %用D-H矩阵来创建一个机器人对象ROBOT(DYN, ...) %用DYN矩阵来创建一个机器人对象利用MATLAB中Robotics Toolbox工具箱中的transl、rotx、roty和rotz可以实现用齐次变换矩阵表示平移变换和旋转变换。
《 机器人技术基础》(实验指导书)

《机器人技术基础》实验指导书实验一、机器人关节空间轨迹的多项式插值一、实验目的和要求1.熟悉关节空间轨迹的多项式插值方法;2.了解关节空间轨迹的插值计算和笛卡尔空间路径轨迹规划的区别; 3.根据关节空间轨迹的要求编程实现轨迹规划。
4.熟练Matlab 语言编程。
二、实验仪器和设备PC 机一台(含“Matlab ”软件)、USB 数据采集卡、37针通信线1根、16芯数据排线、USB 接口线。
三、实验原理机器人作业路径点通常由工具坐标系{T}相对于工作坐标系{S)的位姿来表示,因此,在关节空间中进行轨迹规划:首先需要将每个作业路径点向关节空间变换,即用逆运动学方法把路径点转换成关节角度值,或称关节路径点;然后,为每个关节相应的关节路径点拟合光滑函数;这些关节函数分别描述了机器人各关节从起始点开始,依次通过路径点,最后到达某目标点的运动轨迹。
由于每个关节在相应路径段运行的时间相同,这样就保证了所有关节都将同时到达路径点和目标点,从而也保证了工具坐标系在各路径点具有预期的位姿。
设关节在t 0=0时刻的值是起始关节角度0θ,在终止时刻f t 的值是终止关节角度θf 。
运动轨迹的描述,可用经过起始点关节角度与终止点关节角度的一个平滑插值函数()θt 来表显然,有许多平滑函数可作为关节插值函数。
1. 线性插值如图1,关节空间线性插值的轨迹函数可以表示为:()00=+−f ft t t θθθθ (1)线性插值相比其他插值方式,具有简单、方便的特点。
图1线性函数插值图单纯线性插值会导致起始点和终止点的关节运动速度不连续,这意味着会产生无穷大的加速度,将给两端点造成刚性冲击,因此可以考虑分别在起点和终点处的邻域内增加一段抛物线的“缓冲区段”,即用抛物线与直线连接起来。
2.用抛物线过渡的线性插值如图2所示。
设两端的抛物线轨迹具有相同的持续时间a t ,具有大小相同而符号相反的恒加速度θ。
对于这种路径规划存在有多个解,其轨迹不唯一。
PUMA机器人正逆运动学推导及运动空间解算-机器人技术大作业

0 0 nx 1 0 ny 0 0 nz 0 1 0 c1ox s1o y oz s1ox c1o y 0
ox oy oz 0
ax ay az 0
px py 1T6 pz 1 c1 px s1 p y pz s1 px c1 p y 1
ox oy oz 0
ax ay az 0
px py pz 1
n y c6 c c s c c s s s s s c c c s s 1 5 23 6 1 4 23 1 4 5 1 4 4 23 1 nz s4 s6 s23 c6 c23 s5 c4c5 s23 ox s6 c5 s1s4 c1c4 c23 c1s5 s23 c6 c4 s1 c1c23 s4 o y s6 c5 c1s4 c4c23 s1 s1s5 s23 c6 c1c4 c23 s1s4 oz s6 c23 s5 c4 c5 s23 c6 s4 s23 ax c1c5 s23 s5 s1s4 c1c4c23 a y c5 s1s23 s5 c1s4 c4c23 s1 az a5c23 c4 s5 s23 px c1 a2 c2 a3c23 d 2 s1 d 6 s5 s1s4 c1c4c23 c1c5 s23 c1d 4 s23 p y s1 a2c2 a3c23 c1d 2 d 6 s c s c c s c s s d s s 5 1 23 4 1 23 5 1 4 4 23 1 pz c23d 4 a2 s2 a3 s23 d 6 c5c23 c4 s5 s23
机器人技术大作业(puma机器人的关节坐标建立、D-H参数表给出、正逆运动学推导、matlab工作空间建立)

1坐标系建立:PUMA机器人大作业坐标系可以简化为:2 D-H参数表:PUMA机器人的杆件参数d10.6604m , d20.14909m , d40.43307m , d60.05625m , a20.4318m a30.02032m3正运动学推导c i s i 0 a 1,,i i S i C i 1 C i C i 1 s i 1 d i s i 1由式T i可得s i s i 1 c i s i 1 C i 1 d i C i 10 0 0 1c 1 s 1 0 0c 20 s1 c10 01 0T 1T20 0 1 02s20 1,c4 s40 a3 c5 3T1 d4 4 0T4s4c4T 55s50 0 0 1,T 6 0T 11T 22T 3 3T 4 4T 5 5T 6s20 0c 3s 3 0a20 1d2 2 s3 c3c2T 30 0 10 01,1s50 0 c6s60 0 01 051 05T 6c56s6c60 0 0 0 1,0 1机械手变换矩阵4 逆运动学推导1 .求 1用逆变换0T i 1左乘方程 %T i 工2T 3 3T 4 4T 5 5T 6两边:n x o xa x p xT 6n y o y a y p y n z o z a z p z 0001nx c23 ( c 6 c 5 c 4 c 1 s6s 4c 1 ) s 23c 6s 5c 1c6c 5 s 4 s1 n yc23 (c6 c5 c4 s1s6 s4 s1)s23 c 6 s 5 s 1c 6c5s 4c1nz s 23(c 6c 5c4s 6s4) c23c 6s5ox c23(s 6c 5c 4c 1 c6s 4c 1) s23s 6s 5c 1s6c 5s 4s1 oyc23(s 6c5c 4s1c6s4s 1) s23s 6s 5s1s6s4c 5c1oz s23(s 6c 5c4s6s 4) c23c 6s5ax c23 s 5c 4 c 1 s23c 5c 1 s 5s4s1ay c23s5c 4s1 s23c5s1s5s 4c1azc23c5s2 3 s5c4p x a 3c 23c 1 a 2c 2c 1 d 4 s 23c 1 d 2s 1p y a 3c 23s 1 a 2 c 2 s 1 d 4 s 23s 1 d 2c 1pzd 4c23a3s 23a 2s2s6 c 4 s1 s6c4c1c6c 4s1 c6c4c1矩阵方程两端的元素1 , 4)和(2, 4)分别对应相等G P x S P ya 3C23a 2C2d4 S23P zd 4C 23a 3S23 a 2S 2 10T 6其中kT i 10T 6得到1的解1atan2(p y ,p x ) atan2(d 2, 届p : d ;)2 •求3平方和为:d4 S 3a3C32 2 2,2 ,2 2 2P x P y P z d 2 d 4 a 2 a 32a 2解得: 3 atan2(a 3,d 4) atan2(k, _d : a f k 2)C1C 23S1C 23S23a2C3n xO x a x P xC| S 23Si S 23C 23 a 2S 3nyO y ayPy 3T 6S iC 1 0d 2 n z O z a z P z 00 10 01C i S iS! 0 0 C i 0 0 0 0 1 0 0 00 1 n x O x a x得 S i P x C|P y 三角代换 P x式中,nyn z 0 O yO z 0 aya z0 P x P y P z1d 2cos ,P ysi n 2 2-P x P yatan2(P x , P y )方程两边的元素( 1 , 4) 和(3 , 4) 分别对应相等,得C 1C 23P: x 4 5I C 23 P yS23 Pza3a 2C3C l S23P 〉<SI S23 PyC23Pza 2S3d 4联立,得S23 和 C23Qa 2Ss d 4 GP xSP yP z a ?C 3 a 323P x C 1 2P y S 12P za 2C3a3GP x S 1P yP z a 2S3d 423P x C 1 2P y S 12P zS 23和C 23表达式的分母相等,且为正,于是4 •求4令两边元素(1 , 3)和(2, 3)分别对应相等,则可得C 1C 23axS l C 23a y S 23a z C 4S5S| a x GR y S 4S 5只要S s 0 ,便可求出 44ata n2 sa x c i a y , c i C 23a x Si C 23a y S 23a z当S S 0时,机械手处于奇异形位。
基于MATLAB-RoboticsToolbox的PUMA560机械臂仿真研究

基于MATLAB/RoboticsToolbox的PUMA560机械臂仿真研究王娜【摘要】本文采用标准D-H法对六自由度关节机器人的机构和运动学进行分析,推导出正逆运动学变换公式。
在此基础上,本文运用Matlab机器人工具箱对机器人系统进行了运动仿真,研究了机器人在作业过程中的主要运动学指标的变化情况,十分直观地反映出机器人这一非线性耦合结构中各杆件和末端工作部分的运动状态,为机器人的具体研制、控制策略提供了理论依据。
【关键词】PUMA560机械臂;运动学;动力学;仿真1 PUMA560简介对机器人进行图形仿真,可以直观显示出机器人的运动情况,得到从数据曲线中难以分析出来的许多重要信息,并能从图形上看到机器人在一定控制条件下的运动规律。
从仿真软件中观察机器人工作程序的运行结果,就能分析出该机器人轨迹规划等的正确性和合理性,从而为离线编程提供有效的验证手段。
PUMA560 机械臂是一种示教机器人。
有六个自由度,包括6个旋转关節,模仿人的腰、肩、肘和手腕运动,能以规定的姿态到达工作范围内的任何一个点。
包括:臂体、控制器和示教器三个部分。
它的外观图如图1 所示。
2 PUMA560的空间坐标系建立PUMA560一般由移动关节和转动关节共同作用,组成机器人的操作臂,每个关节都有一个自由度。
在六自由度下,我们规定连杆0表示基座,关节1让基座0与连杆1相接,关节2让连杆1与连杆2相连接,以此类推。
如图2所示。
3 确定D-H坐标系PUMA560的6个关节全为转动关节如下:Xi轴:沿着Zi和Zi-1的公法线,指向离开Zi-1轴的方向;Yi轴:按右手直角坐标系法则制定;Zi轴:沿着i+1关节的运动轴;两连杆距di:Xi和Xi1两坐标轴的公法线距离;两杆夹角θi:Xi和Xi1两坐标轴的夹角;连杆长度ai:Zi和Zi-1两轴心线的公法线长度;连杆扭角αi:Zi和Zi-1两轴心线的夹角;所以相邻坐标系i和i-l的D-H变换矩阵为:6 结论本文利用 MATLAB Robotics Toolbox 建立了PUMA560机器人的三维模型,分析了它的正运动学、逆运动学和轨迹规划问题,验证了仿真的合理性。
机器人技术大作业(puma机器人的关节坐标建立、D-H参数表给出、正逆运动学推导、matlab工作空间建立)
1坐标系建立:PUMA机器人大作业坐标系可以简化为:2 D-H参数表:PUMA机器人的杆件参数d10.6604m , d20.14909m , d40.43307m , d60.05625m , a20.4318m a30.02032m3正运动学推导c i s i 0 a 1,,i i S i C i 1 C i C i 1 s i 1 d i s i 1由式T i可得s i s i 1 c i s i 1 C i 1 d i C i 10 0 0 1c 1 s 1 0 0c 20 s1 c10 01 0T 1T20 0 1 02s20 1,c4 s40 a3 c5 3T1 d4 4 0T4s4c4T 55s50 0 0 1,T 6 0T 11T 22T 3 3T 4 4T 5 5T 6s20 0c 3s 3 0a20 1d2 2 s3 c3c2T 30 0 10 01,1s50 0 c6s60 0 01 051 05T 6c56s6c60 0 0 0 1,0 1机械手变换矩阵4 逆运动学推导1 .求 1用逆变换0T i 1左乘方程 %T i 工2T 3 3T 4 4T 5 5T 6两边:n x o xa x p xT 6n y o y a y p y n z o z a z p z 0001nx c23 ( c 6 c 5 c 4 c 1 s6s 4c 1 ) s 23c 6s 5c 1c6c 5 s 4 s1 n yc23 (c6 c5 c4 s1s6 s4 s1)s23 c 6 s 5 s 1c 6c5s 4c1nz s 23(c 6c 5c4s 6s4) c23c 6s5ox c23(s 6c 5c 4c 1 c6s 4c 1) s23s 6s 5c 1s6c 5s 4s1 oyc23(s 6c5c 4s1c6s4s 1) s23s 6s 5s1s6s4c 5c1oz s23(s 6c 5c4s6s 4) c23c 6s5ax c23 s 5c 4 c 1 s23c 5c 1 s 5s4s1ay c23s5c 4s1 s23c5s1s5s 4c1azc23c5s2 3 s5c4p x a 3c 23c 1 a 2c 2c 1 d 4 s 23c 1 d 2s 1p y a 3c 23s 1 a 2 c 2 s 1 d 4 s 23s 1 d 2c 1pzd 4c23a3s 23a 2s2s6 c 4 s1 s6c4c1c6c 4s1 c6c4c1矩阵方程两端的元素1 , 4)和(2, 4)分别对应相等G P x S P ya 3C23a 2C2d4 S23P zd 4C 23a 3S23 a 2S 2 10T 6其中kT i 10T 6得到1的解1atan2(p y ,p x ) atan2(d 2, 届p : d ;)2 •求3平方和为:d4 S 3a3C32 2 2,2 ,2 2 2P x P y P z d 2 d 4 a 2 a 32a 2解得: 3 atan2(a 3,d 4) atan2(k, _d : a f k 2)C1C 23S1C 23S23a2C3n xO x a x P xC| S 23Si S 23C 23 a 2S 3nyO y ayPy 3T 6S iC 1 0d 2 n z O z a z P z 00 10 01C i S iS! 0 0 C i 0 0 0 0 1 0 0 00 1 n x O x a x得 S i P x C|P y 三角代换 P x式中,nyn z 0 O yO z 0 aya z0 P x P y P z1d 2cos ,P ysi n 2 2-P x P yatan2(P x , P y )方程两边的元素( 1 , 4) 和(3 , 4) 分别对应相等,得C 1C 23P: x 4 5I C 23 P yS23 Pza3a 2C3C l S23P 〉<SI S23 PyC23Pza 2S3d 4联立,得S23 和 C23Qa 2Ss d 4 GP xSP yP z a ?C 3 a 323P x C 1 2P y S 12P za 2C3a3GP x S 1P yP z a 2S3d 423P x C 1 2P y S 12P zS 23和C 23表达式的分母相等,且为正,于是4 •求4令两边元素(1 , 3)和(2, 3)分别对应相等,则可得C 1C 23axS l C 23a y S 23a z C 4S5S| a x GR y S 4S 5只要S s 0 ,便可求出 44ata n2 sa x c i a y , c i C 23a x Si C 23a y S 23a z当S S 0时,机械手处于奇异形位。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
matlab实现PUMA机器人的工作空间
PUMA机器人的工作空间主要有前3个关节决定,后3个关节决定姿态。
程序编写好了,请看运行结果!
步长为20度
步长为10度
步长为5度
步长为3度
步长为2度
步长为5度时的XY平面
步长为5度时的XZ,YZ平面
编写时的界面,为运行
源代码如下:
function varargout = mypuma(varargin)
gui_Singleton = 1;
gui_State = struct('gui_Name', mfilename, ... 'gui_Singleton', gui_Singleton, ...
'gui_OpeningFcn', @mypuma_OpeningFcn, ...
'gui_OutputFcn', @mypuma_OutputFcn, ...
'gui_LayoutFcn', [], ...
'gui_Callback', []);
if nargin && ischar(varargin{1})
gui_State.gui_Callback = str2func(varargin{1});
end
if nargout
[varargout{1:nargout}] = gui_mainfcn(gui_State, varargin{:});
else
gui_mainfcn(gui_State, varargin{:});
end
handles.output = hObject;
guidata(hObject, handles);
function varargout = mypuma_OutputFcn(hObject, eventdata, handles) varargout{1} = handles.output;
%步长为20度时的工作空间,2个for循环就搞定
function pushbutton1_Callback(hObject, eventdata, handles)
hold off;
for a=(-160:20:160)*pi/180
for b=(-225:20:45)*pi/180
x=431.8*cos(b)*cos(a)-149.09*sin(a);
y=431.8*cos(b)*sin(a)+cos(a)*149.09;
z=-431.8*sin(b);
plot3(x,y,z,'b.');
hold on;
grid on;
end
end
title('PUMA560 20deg 08S008103 ');
%步长10度时的工作空间,2个for循环就搞定
function pushbutton2_Callback(hObject, eventdata, handles) hold off;
a2=431.8;
d2=149.09;
for a=(-160:10:160)*pi/180
for b=(-225:10:45)*pi/180
x=431.8*cos(b)*cos(a)-149.09*sin(a);
y=431.8*cos(b)*sin(a)+cos(a)*149.09;
z=-431.8*sin(b);
plot3(x,y,z,'r.');
hold on;
grid on;
end
end
title('PUMA560 10deg 08S008103 ');
%步长为5度时的工作空间,2个for循环就搞定
function pushbutton3_Callback(hObject, eventdata, handles) hold off;
a2=431.8;
d2=149.09;
for a=(-160:5:160)*pi/180
for b=(-225:5:45)*pi/180
x=431.8*cos(b)*cos(a)-149.09*sin(a);
y=431.8*cos(b)*sin(a)+cos(a)*149.09;
z=-431.8*sin(b);
plot3(x,y,z,'g.');
hold on;
grid on;
end
end
title('PUMA560 5deg 08S008103 ');
%步长为3度时的工作空间,2个for循环就搞定
function pushbutton7_Callback(hObject, eventdata, handles) hold off;
for a=(-160:3:160)*pi/180
for b=(-225:3:45)*pi/180
x=431.8*cos(b)*cos(a)-149.09*sin(a);
y=431.8*cos(b)*sin(a)+cos(a)*149.09;
z=-431.8*sin(b);
plot3(x,y,z,'b.');
hold on;
grid on;
end
end
title('PUMA560 3deg 08S008103 ');
%步长为2度时的工作空间,2个for循环就搞定
function pushbutton8_Callback(hObject, eventdata, handles) hold off;
for a=(-160:2:160)*pi/180
for b=(-225:2:45)*pi/180
x=431.8*cos(b)*cos(a)-149.09*sin(a);
y=431.8*cos(b)*sin(a)+cos(a)*149.09;
z=-431.8*sin(b);
plot3(x,y,z,'b.');
hold on;
grid on;
end
end
title('PUMA560 2deg 08S008103 ');
%步长为5度时的xy平面
function pushbutton4_Callback(hObject, eventdata, handles) hold off;
a2=431.8;
d2=149.09;
for a=(-160:5:160)*pi/180
for b=(-225:5:45)*pi/180
x=431.8*cos(b)*cos(a)-149.09*sin(a);
y=431.8*cos(b)*sin(a)+cos(a)*149.09;
z=-431.8*sin(b);
plot(x,y,'g.');
hold on;
grid on;
end
end
title('PUMA560 5degXY 08S008103 ');
%步长为5度时的xz平面
function pushbutton5_Callback(hObject, eventdata, handles) hold off;
a2=431.8;
d2=149.09;
for a=(-160:5:160)*pi/180
for b=(-225:5:45)*pi/180
x=431.8*cos(b)*cos(a)-149.09*sin(a);
y=431.8*cos(b)*sin(a)+cos(a)*149.09;
z=-431.8*sin(b);
plot(x,z,'g.');
hold on;
grid on;
end
end
title('PUMA560 5degXZ 08S008103');
%步长为5度时的yz平面
function pushbutton6_Callback(hObject, eventdata, handles) hold off;
a2=431.8;
d2=149.09;
for a=(-160:5:160)*pi/180
for b=(-225:5:45)*pi/180
x=431.8*cos(b)*cos(a)-149.09*sin(a);
y=431.8*cos(b)*sin(a)+cos(a)*149.09;
z=-431.8*sin(b);
plot(y,z,'g.');
hold on;
grid on;
end
end
title('PUMA560 5degY-Z 08S008103 ');。