卡西欧FX5800P编程计算器应用及程序
5800P曲线坐标计算编程使用(非标准曲线)

曲线任意里程中边桩坐标正反算(CASIO fx-5800P计算器)程序曲线任意里程中边桩坐标正反算(CASIO fx-5800P计算器)程序一、程序功能本程序由一个主程序(TYQXJS)和两个子程——正算子程序(SUB1)、反算子程序(SUB2)序构成,可以根据曲线段——直线、圆曲线、缓和曲线(完整或非完整型)的线元要素(起点坐标、起点里程、起点切线方位角、线元长度、起点曲率半径、止点曲率半径)及里程边距或坐标,对该曲线段范围内任意里程中边桩坐标进行正反算。
另外也可以将本程序中核心算法部分的两个子程序移植到其它相关的程序中,用于对曲线任意里程中边桩坐标进行正反算。
本程序也可以在CASIO fx-4500P计算器及CASIO fx-5800 P计算器上运行。
特别申明:(1). 适用于弧长小于2倍半径的各种线元坐标正反算,精度优于1mm;(2). 在引用该核心计算部分时,请注明来源。
(3)该程序可计算标准、非标准曲线,但不可以计算与线路成斜交角的坐标二、源程序主程序(QXJS)"1.SZ => XY":"2.XY => SZ"?N:"X0"?U: "Y0"?V: "S0"?O: "FWJ0"?G: "LS"?H:"R0"?P?"RS"?R: "PX "?Q:1÷P→C:(P-R)÷(2HPR)→D:180÷π→E:If N=1:Then Goto 1:Else Goto 2:IfEndLbl 1: "KS"?Z:"ES"?S:Abs(Z-O)→W:Prog "QXZS":"XS=" :X→X◢"YS=": Y→Y◢"FWJS=":(F-90)DMS◢Prog "GC"Goto1Lbl 2:"XS"?X:"YS"?Y:X→I:Y→J:Prog "QXFS":O+W→Z"KS=":Z→Z◢"ES=": S→S◢"FWJS=":(F-90)DMS◢Prog "GC"Goto 21.全线计算主程序(XLJS)"1.SZ => XY":"2.XY => SZ":"1 or 2"?N: Lbl 0:"KS"?Z:"ES"?S:Prog "XXX":1÷P→C:(P-R)÷(2HP R)→D:180÷π→E:If N=1:Then Goto 1: Else Goto 2:IfEndLbl 1:Abs(Z-O)→W:Prog "QXZS":"XS=" :X→X◢"YS=": Y→Y◢"FWJS=":(F-90)DMS◢Prog "GC"Goto 0Lbl 2:"XS"?X:"YS"?Y:X→I:Y→J:Prog "QXFS":O+W→Z"KS=":Z→Z◢"ES=": S→S◢"FWJS=":(F-90)DMS◢Prog "GC"Goto 22. 正算子程序(QXZS)0.1739274226→A:0.3260725774→B:0.0694318442→K:0.3300094782→L:(1-L)→F:(1-K)→M:(U+W(Ac os(G+QEKW(C+KWD))+Bcos(G+QELW(C+LWD))+Bcos(G+QEFW(C+FWD))+Acos(G+QEMW(C+MW D))))→X:(V+W(Asin(G+QEKW(C+KWD))+Bsin(G+QELW(C+LWD))+Bsin(G+QEFW(C+FWD))+Asin(G +QEMW(C+MWD))))→Y:G+QEW(C+WD)+90→F:X+Scos(F→X:Y+Ssin(F→YReturn3. 反算子程序(QXFS )G-90→T:Abs((Y-V)cos(T)-(X-U)sin(T))→W:0→S:Lbl 0:Prog " QXZS ":T+QEW(C+WD)→L:(J-Y)co s(L)-(I-X)sin(L)→S:If Abs(S)<10^(-6):Then Goto1:Else S+W→W:Goto 0:IfEndLbl 1:0→S:Prog " QXZS ":(J-Y)÷sin(F)→SReturn数据库:XXXLbl 1:If Z≤下一起点里程: Then本线路起点里程→O:本线路X→U:本线路Y→V:本线路方位角→G:本线路长度→H:本线路起点半径→P:本线路止点半径→R:±1→Q (左偏Q=-1,右偏Q=1,直线段Q=0):Else If Z≤下一起点里程: Then本线路起点里程→O:本线路X→U:本线路Y→V:本线路方位角→G:本线路长度→H:本线路起点半径→P:本线路止点半径→R:±1→Q :IfEnd: IfEndReturn四、数据库1、线路平面数据库数据名:“XXX”可根据自己须要更改Lbl 1:If Z≤80(计算段终点里程) : Then 0→O (计算段起点里程): 62450.391→U(起点里程纵坐标): 56853.282→V (起点里程横坐标): 220°31′33″→G(计算段起点里程切线方位角): 80→H(缓和线): 10^45→P曲率半: 782.716→R(曲率半): -1→Q (线路左右偏): Else If Z≤xxx: Then0→O (计算段起点里程): 62450.391→U(起点里程纵坐标): 56853.282→V (起点里程横坐标): 220°31′33″→G(计算段起点里程切线方位角): 80→H(缓和线): 10^45→P曲率半: 782.716→R(曲率半): -1→Q: IfEnd: IfEndReturnO=80:U=62388.712:V=56802.348:G=²²²²²²²²²²²²注:数据库内数据为示意数据,编两曲线中直线段时“H=”为该段长;半径“P=”、“R=”详以上使用说明;坐标、方位角为计算段起点的。
FX-5800p编程
比积分公式快速CASIO fx-5800P放样程序(比积分公式快速)正算主程序[ZD-KB]“1,2,3,4,5”?Z:?X:?YLbl 1:Fix 4:?K:?B:?A:0→P:0→RZ=1=>Prog“YS-1”Z=2=>Prog“YS-2”Z=3=>Prog“YS-3”Z=4=>Prog“YS-4”Z=5=>Prog“YS-5”Prog“ZDYS”:M-X→I:N-Y→J:Prog“C”: Cls:Locate 1,1,“J=”:Locate 4,1, J°:Locate 1,2,“I=”:Locate 10,2,I:Locate 1,3,“M=”:Locate 7,3,M:Locate 1,4,“N=”:Locate 7,4,N◢Cls:Goto 1反算主程序[ZD-MN]“1,2,3,4,5”?Z:?KLbl 0:Fix 4:?M:?N:M→D:N→ELbl 1:90→A:0→B:0→P:0→RZ=1=>Prog“YS-1”Z=2=>Prog“YS-2”Z=3=>Prog“YS-3”Z=4=>Prog“YS-4”Z=5=>Prog“YS-5”Prog“ZDYS”:Pol(D-M+×10-9,E-N+×10-9:Isin(L-J→A:Icos(L-J→BIf Abs(A)>0.001:Then K+A→K:Goto 1:Else Cls:Locate 1,1,“K=”:Locate 9,2, K:Loc ate 1,3,“B=”:Locate 10,4,B◢IfEnd:Goto 0子程序[C]I+×10-9→I:J+×10-9→J:Pol(I,J:J<0=>J+360→J数据库子程序[YS-1]If K<线元终点里程:Then线元起点切线方位角→C:线元起点X坐标→U:线元起点Y 坐标→V:线元起点里程→O:线元长度→F:±线元起点曲率半径(左转为负,右转为正,直线为零)→P:±线元止点曲率半径(左转为负,右转为正,直线为零)→R:Return:IfEn dIf K<下一条线元终点里程:Then线元起点切线方位角→C:线元起点X坐标→U:线元起点Y坐标→V:线元起点里程→O:线元长度→F:±线元起点曲率半径(左转为负,右转为正,直线为零)→P:±线元止点曲率半径(左转为负,右转为正,直线为零)→R:Re turn:IfEnd子程序[ZDYS]P=0=>×1045→P:R=0=>×1045→R:If PR>0:Then 1→Q:Else -1→Q:IfEnd:PR≥×1090=>0→Q:R<0=>-1→Q:Abs(P→P:Abs(R→R:1÷P→H:180÷π→J:(P-R)÷(2FPR→I:Abs(K-O→W:0.1739274226→N:0.3260725774→M:0.0694318442→S:0.3300094782→L:1-L→G:C+QJSW(H+SWI→T:C+QJLW(H+LWI→L:C+QJGW(H+GWI→G:C+QJ W(1-S)(H+WI(1-S→F:A+C+QJW(H+WI→CU+W(Ncos(T)+Mcos(L)+Mcos(G)+Ncos(F→I:V+W(Nsin(T)+Msin(L)+Msin(G)+Nsin(F →J:C→L:I+Bcos(L→M:J+Bsin(L→N正算主程序[KB-MN]输入:1,2,3,4,5---选择待正算的线路X---测站X坐标Y---测站Y坐标 K---桩号B---距中(左负右正中零)结果:J=测站到放样点的方位角I=测站到放样点的平距M=放样点X坐标N=放样点Y坐标若果求斜交时边桩坐标,主程序[KB-MN]中90→A修改为斜交角度→A反算主程序[MN-KB]输入:1,2,3,4,5---选择待反算的线路K---待反算点附近的大概桩号M---待反算点X坐标 N---待反算点Y坐标结果:K=反算点的桩号 B=反算点的距中(左负右正中零)使用说明:(数据库[YS-1]中,当P或R的值为零时,可以省略输入0→P或0→R)输程序时,例“×1045→P”的小“×10”为计算器面板的白色键“×10X”子程序[ZDYS]中×1045→P相当于10∧(45)→PPR≥×1090=>0→Q即PR≥10∧(90)=>0→Q1、当线元为直线时,其起点、止点曲率半径为零。
卡西欧FX5800P编程计算器应用及程序
程序示例
U“Z=0 Y≠0”=0
K0+=0 H0=3014.6 ≥=1/74.09 D=2.9 E=2.46 R=1.671
【1】 直线段
实测坐标(m)
圆拱段超欠(m) 直墙超欠(m) 底板超欠(m) 至拱肩高差(m)
111.139 93.763 64.030 94.543 116.748
18°52ˊ49.81" 91°24ˊ13.56" 88°26ˊ53.49" 49°40ˊ03.20" 60°41ˊ09.73"
移 动 值(m)
DV=、0.254 D∧=、0.700 DV=、0.049 DV=、0.140 DV=、0.168
据目录(个数)是利用“ ”,按 FUNCTION->7->2->1->EXE 就可以看到个数了。
在程序中调用统计储存器中的数据时,是利用 List 调用的。具体格式如下: List X[A]+Y[A]i->C
式中 A 是点号,C 是任意储存单元。具体示例详见“程序部分”->“极程序放样” (2)、利用统计计算(SD/REG)
2、以 形式计算。以坐标换算为例:
坐标重合点 A 旧坐标 98042.831->SHIFT->RCL->A 11430.122->SHIFT->RCL->B A+Bi->E 新坐标值均为零,就不必另行输值,新旧坐标方位角差值 69°56"23"->W。 要求计算施工坐标 X=27,Y=29.1 的 B 点的测量坐标。 计算赋值:27->U,29.1->V。U+Vi->F
<=、0.663 =>、0.023 <=、0.218 <=、0.561 =>、0.298
CASIO5800P 程序更新版

CASIO fx—5800P 计算程序1:曲线计算程序名:QXJS“L=”?L:“LI CHENG=”?W L为项目编号,W为里程;本程序按两个项目设计(预设置),5800P可满足多个100公里以上的项目计算,项目编号以此类推,添加类似语句即可。
0→D:1→VLbl 11→NL=1=>Prog”L1”为快速查找项目1平面元素而设置了N初始值的转子程序,没必要时可删除L=2=>Prog”L2”为快速查找项目2平面元素而设置了N初始值的转子程序,没必要时可删除For N→N to 50 循环语句终值50可根据交点的数量大小调整L=1=>Prog“L1-XY”转项目编号为1的线路平曲线元素的子程序L=2=>Prog“L2-XY”转项目编号为2的线路平曲线元素的子程序If W≥Rep(Z)And W≤Imp(Z):Then Goto 2: IfEnd:Next 当前里程与计算区间Z比较“Sto p!”:Stop 输入不在本项目范围的错误里程时停止运行Lbl 2If K<0:Then Q→X: 平曲线元素可能是交点里程、坐标时运行该条件语句,交点里程以负值输入元素表中0→Q:0→J:S+C→I: -K→K:Goto 6:IfEndGoto 5Lbl 3Q<0=>360+Q→Q“LI CHENG=”?W 同上,此处是回到当前计算区间继续输入新里程Lbl 4If W≥Rep(Z) And W≤Imp(Z):Then Goto5:EIse“>>>>” :Goto1 :IfEnd同上,当前里程可能找不到计算元素而回到Lbl 1重新开始从头查找Lbl 50→Jμ0+Abs(W-Abs(K)→Iμ0是无穷小量,避免特殊情况错误运行,I为计算当前里程到ZH或HZ点长度W:K<0=>-WIf Ans<K:Then 0→U:-I:Goto 7:IfEnd 为ZH或HZ两端直线上计算条件语句I>S+C=>S+C→ILbl 6If I<S:Then I2r÷(2RS) →U:I-I∧(5) ÷(40R2S2)+i(I∧(3)÷(6RS)-I∧(7) ÷(336R∧(3)S∧(3)) :EIse(2I-S) r ÷(2R) →U:Z[2]+R(Sin(U)-icos(U)+i):IfEnd 缓和曲线与综合曲线计算条件语句Lbl 7J+Anscos(Q)+Ans i Sin(Q) →J 坐标旋转、平移之变换计算语句If I=S+C:Then Q+ A→Q:-K-I-T→K:T→I:S→T:I→S:- R→R:Pr og“MP”:Goto 6: IfEnd ZH与HZ端换头计算语句,下同If Q+A=0:Then X-A-180→Q 平曲线元素可能是交点里程及坐标时所作变换计算的条件语句:K+Rep(J) +Imp(J) ÷tan(A) →K:O+Imp(J)(cos(Q) +i sin(Q)) ÷sin(A)→O:Goto 5:IfEndIf I=S:Then Q-180→Q:O+J→O:Goto 5:IfEndK <0=>U+180→UQ+U→UD=1=>Goto 8“BJ a+b i=”?E 输入水平边距和高程边距。
卡西欧fx5800计算器缓和曲线编程
1fx-5800P计算器编程缓和曲线程序14→DimZ :“ZHK”:?K:?R :? A:?L:? T:? F:“Y+1,Z-1”:?P:“JDX”:?Q:“JDY”:?W:180÷(πR)→Z:0.5L-L^3÷(240R2)→Z[8]:“LZ”:ZL÷2→B:A÷Z+L→Z[13]◢“ZHK=”:K◢“HYK=”:K+L→Z[1]◢“YHK=”:K+ Z[13] -L→Z[2]◢“HZK=”:K+ Z[13]→Z[3]◢“ZHX=”:Q+Tcos(F+180)→U◢“ZHY=”:W+Tsin(F+180)→V◢“HZX=”:Q+ Tcos(F+PA)→Z[6]◢“HZY=”:W+ Tsin (F+PA)→Z[7]◢Lb1 0:“CDZH”:?MIf M≤K:Then Goto 6:Else If M≤Z[1] :Then Goto 1:Else If M≤Z[2] :Then Goto 2:Else If M≥Z[3] :Then Goto 7:Else If M≥Z[2] :Then Goto 5:If End:If End:If End:If End:If EndLb1 1:M-K→G:√((G-G^(5)÷(40L2R2)+G^(9)÷(3456R^(4)L^(4)))2+(G^(3)÷(6RL)-G^(7)÷(336R^(3)L^(3)) +G^(11)÷(42240R^(5)L^(5)))2)→D F+PZG2÷(6L)→C:F+PBG2÷L2→H:Goto 3Lb1 2:M-Z[1]→G:R(1-cos(B+ZG))+L2÷(24R)→Z[9]:√(Z[9]2+(Rsin(B+ZG)+Z[8])2)→DF+Ptg-1(Z[9]÷(Rsin(B+ZG)+Z[8]))→C:F+P(B+ZG)→HLb1 3“X=”:U+Dcos(C)→X◢“Y=”:V+Dsin(C)→Y◢Lb1 B:“ZBJS1,FY-1”:?JIf J>0:Then Goto 4:Else If J〈0:Then Goto A:If End:If EndLb1 4:“ZB”:?S“ZBX”:X+Scos(H-90)◢“ZBY”:Y+Ssin(H-90)◢“YB”:?N“YBX”:X+Ncos(H+90)◢“YBY”:Y+Nsin(H+90)◢Goto 0Lb1 5:Z[3]-M→G:(T-G+G^(5)÷(40L2R2)-G^(9)÷(3456R^(4)L^(4))) sin(A) +(G^(3)÷(6RL)-G^(7)÷(336R^(3)L^(3))+G^(11)÷(42240R^(5)L^(5))) cos(A)→Z[4]:T+(T -G+G^(5)÷(40L2R2))cos(A) -(G^(3)÷(6RL)-G^(7)÷(336R^(3)L^(3))) sin(A)→Z[5]:√(Z[4]2+Z[5]2)→D :F+Ptg-1(Z[4]÷Z[5])→C:F+P(A-BG2÷L2) →H:Goto 3Lb1 6:K-M→D:F+180→C:F→H:Goto 3Lb1 7:M-Z[3]→D:F+PA→C:C→H:Goto 9Lb1 9:“X=”: Z[6]+Dcos(C)→X◢“Y=”: Z[7]+Dsin(C)→Y◢Goto BLb1 A:“N”:?N:“E”:?S:“H”:?I“X=”:(N-X)cos(H)+(S-Y)sin(H)+M→Z[10]◢“Y=”:(S-Y)cos(H)-(N-X)sin(H) →Z[11]◢“MS”:1711.15+0.004(Z[10]-85030) →E◢If I≥E+2 :Then“+-R1”:6.57-√((I-E-2)) 2+ Z[11] 2→OElse If I<E+2 :Then“+R2”:7.47-√((E+2-I) 2+(Abs( Z[11])+0.9) 2→O◢“﹦>DB”:(I-E+0.5)→O◢Z[10] →M:If End:If EndGoto 01.1程序说明“DimZ”—内存变量扩充“ZHK”—输入直缓点桩号“R”—输入曲半径“L”—输入缓和曲线长“A”—输入偏角“Y+1,Z-1”—路线右转输+1,左转输-1“FWJ”—输入起算方位角“JDX”—输入交点X坐标“JDY”—输入交点Y坐标“ZHK=”:得出直缓点桩号“HYK=”:得出缓圆点桩号“YHK=”:得出圆缓点桩号“HZK=”:得出缓直点桩号“ZHX=”:得出直缓点X“ZHY=”:得出直缓点Y“HZX=”:得出缓直点X“HZY=”:得出缓直点Y“CDZH”—输入待测点桩号“X=”:得出测点桩号中心桩N“Y=”:得出测点桩号中心桩E“ZBJS1,FY-1”—①(坐标计算)施工坐标转大地坐标输+1,“ZB”—输入中桩到左边桩的距离;“ZBX”: 得出待测点左边N值“ZBY”: 得出待测点左边E值“YB”—输入中桩到右边桩的距离;“YBX”: 得出待测点右边N值“YBY”: 得出待测点右边E值②(放样)大地坐标转施工坐标输-1,“N”—输入大地坐标的N坐标;“E”—输入大地坐标的E坐标。
新型编程计算器CASIOfx-5800P使用方法与编程技巧
40个科学常数
ANGLE
输入角度变换函数,,,
CLR
输入各类清除命令
ClrStat,ClrMemory,ClrMat,ClrVar
STAT
输入统计计算串列数据、统计变量与分布符
MATRIX
定义矩阵维数、输入矩阵数据、输入矩阵符
Mat、行列式符
det、转置符
5列
20个大矩形键的功能主要是数字和+、-、
×、÷四则运算符。
每个按键一般有键面字符、键上部
1~3个字符共3~4种功能,
各功能在键盘及其上方用不同颜色的符号标记,以帮助用户方便图
A-3 fx-5800P计算器按键
地找到所需的按键操作。
图
A-3所示键面的功能与按键操作列于表
A-1。
表
A-1 fx-5800P的按键操作方法
Math
输入∫dx,d/dX,d2/dX2,Σ(,X!,Ran#,nPr,nCr,Abs,Int,Frac,Intg,
Pol(,Rec(,logab,RanInt,sinh,cosh,tanh,sinh-1,cosh-1,tanh-1等数学
函数符
COMPLX
输入
Abs,Arg,Conjg,ReP,ImP,,等复数函数符
按下键后出现,表示将输入键上方红色字符所注的字母或符号
选用“度”作为角度计算单位
选用“弧度”作为角度计算单位
选用“哥恩”作为角度计算单位
SD单变量统计模式
2
REG双变量统计及回归模式
FIX指定显示小数位数格式有效
SCI指定显示小数位的科学显示格式有效
ENG工程显示格式有效
当前显示的数值为中间结果
CASIO5800程序编辑说明
CASIO 5800程序编辑说明CASIO-5800P计算器程序编辑说明一(程序名称:直线坐标计算——Z-X-Z程序内容:1. “X=“,A : “Y=“,B : “Q=”,Q2. LbI 03. “N=”,N : “S=”,S : ”E=”,E4. A + N cos(Q) ?D : B + N sin(Q) ?F5. D + S cos(Q + E) ?6. F + S sin(Q + E) ?7. Goto 0内容说明:A 、 B——以知点即起算点的x,y坐标值;Q——直线段方位角;N——直线段距离;S——边桩距离;E——转向角;(左转为“,E”,右转为“E”) 二(程序名称:圆曲线任意坐标计算——ZY-YZ程序内容:1. “Q=”,Q : “ X= ”,W : “ Y= “,K : “R= ”,R:“F=”,F : “N=”,N : “U=”,U2. R tan(N?2) ? T3. Q–T ? A4. W+T cos(F+180) ?M : K+T sin(F+180) ?G5. LbI 06. “H=” ,H : ” S=” ?,S : “E=” ,E7. Abs(H - A) ? D8. 180 D?(Rπ) ?О9. R sin(О) ?C10. R (1-cos(О)) ?D11. M+C cos(F) ? I : G+C sin(F) ? J12. I+D cos(F+90U) ?X : J+D sin(F+90U) ? Y13. X+S cos(F+ОU+E) ?14. Y+S sin(F+ОU+E) ?15. Goto 0内容说明: Q——交点里程桩号;W 、K——交点X、Y坐标;R——圆曲线半径;F——前切线正方位角;N——偏角;(即转向角)U——控制偏角条件;(左偏角输入“,1”,右偏角输入“+1”)H——圆曲线上任意一点里程桩号;S——中桩至边桩距离;E——夹角;(左边桩输入“,E”,右边桩输入“E”) 三(程序名称:极坐标放样元素计算——J-Z-B-F-J程序内容: 1. “X=”,A : “Y=”,B : “X0=”,C :“Y0=”,D2. PoI ( C - A,D - B ) : CIs3. If J,0 : Then J+360?E : EIse J?E:IfEnd:E?DMS?4. I?5. LbI 06. “XN=”,U7. WhiIe U?0 (输入“0”即结束程序)8. “YN=”,V9. PoI(U-A,V-B):CIs10. If J,0:Then J+360?F:EIse J?F:IfEnd:F?DMS?11. I?12. F – E ? H13. If H,0:Then H+360?H:IfEnd : H?DMS?14. Goto 0内容说明: A、B——测站点坐标C、D——0方向点坐标E——计算出的测站点至0方向点的方位角I——计算出的测站点至0方向点的距离U,V——N方向点坐标F——计算出的测站点至N方向点的方位角I——计算出的测站点至N方向点的距离H——计算出的0方向与N方向的水平夹角表格:点号 X坐标 Y坐标距离方位角起止点号夹角测站点0点 0?01点 0?12点 0?2四(程序名称:有缓和曲线的圆曲线上点位坐标计算 F-Y-X-Y 程序内容:1(“Q=”,Q :“J=”,J :“K=”,K :“R=”,R :“F=”,F :“N=”,N :“I =”,I :“U=”,U2(6 ? Dim Z3(90 I?(Rπ) ? G (切线角,即缓和曲线角计算)3 24 4(I?(24R) - I?(2688R) ? P (内移距)32 5(I?2 - I?(240R) ? M (切线增值)6((R+P) tan (N?2)+M ? T (切线长)7(πRN ? 180 + I ? L (曲线长)8(Q – T ? A : A + I ? B :A + L ? D : D – I ? C9(J + T cos(F+180) ? Z[1] : K + T sin (F+180) ? Z[2]10(LbI 011(“H=”,H :“S=”,S :“E=”,E12(H – A – I ? Z13(180 Z?(Rπ) + G ? О14(R sin(О) + M ? X15(R (1 –cos(О)) + P ? Z16(Z[1]+ Xcos( F ) ? Z[3] : Z[2] + X sin( F )? Z[4]17(Z[3]+ Z cos (F + 90U ) ? Z[5] :Z[4] + Z sin(F + 90U )? Z[6]18(Z[5]+ S cos ( F +ОU + E ) ?19. Z[6] + S sin( F+ОU + E ) ?20(Goto 0内容说明: Q——交点里程桩号;J 、K——交点X、Y坐标;R——圆曲线半径;F——前切线正方位角;N——偏角;(即转向角)I——缓和曲线长;U——控制偏角条件;(左偏角输入“,1”,右偏角输入“+1”) H——有缓和圆曲的线圆曲线上任一点里程桩号;S——中桩至边桩距离;E——夹角;(左边桩输入“,E”,右边桩输入“E”)第9项——ZH点坐标;五(程序名称:缓和曲线段上点位坐标计算 F-H-X-Y程序内容:1 (“Q=”,Q :“J=”,J :“K=”,K :“R=”,R : “F=”,F :“N=”,N :“I =”,I :“U=”,U2(12 ? Dim Z32 3(I?2 - I?(240R) ? M (切线增值)3 24 4(I?(24R) - I?(2688R) ? P (内移距)5(πRN ? 180 + I ? L (曲线长)6(M+ (R+P) tan (N?2) ? T (切线长)7(Q – T ? A : A + I ? B : (ZH : HY)A + L ? D : D – I ? C (HZ:YH)8(J + T cos(F+180) ? Z[1] : K + T sin (F+180) ? Z[2] 9. J + T cos(F+NU) ? Z[3] : K + T sin (F+NU) ? Z[4] 10(LbI 011(“H=”,H :“S=”,S :“E=”,E12. H,B? Goto 113. H,D? Goto 214(LbI 115(Abs(H - A) ? Z216(90 Z?(πR I ) ?О229445 17(Z - Z?(40 RI) + Z?(3456 RI) ? X 7331155318(Z?(6 RI) – Z?(336 RI) + Z?(42240 RI) ? Z 19(Z[1]+ Xcos( F ) ? Z[5] : Z[2] + X sin( F )? Z[6] 20(Z[5]+ Z cos (F + 90U ) ? Z[7] :Z[6] + Z sin(F + 90U )? Z[8]21(Z[7]+ S cos ( F +ОU + E ) ?22. Z[8] + S sin( F+ОU + E ) ?23(Goto 024. LbI 225. D - H ? Z226(90 Z?(πR I ) ?О229445 27(Z - Z?(40 RI) + Z?(3456 RI) ? X 7331155328(Z?(6 RI) – Z?(336 RI) + Z?(42240 RI) ? Z 29(Z[3]+ X cos( F + NU+180 ) ? Z[9] :Z[4] + X sin( F + NU+180)? Z[10]30(Z[9]+ Z cos (F + NU+180 - 90U ) ? Z[11] :Z[10] + Z sin(F + NU+180 - 90U )? Z[12]31(Z[11]+ S cos ( F +NU+180 - ОU -(180 – E)) ?32. Z[12] + S sin( F+ NU+180 - ОU -(180 - E)) ?33. Goto 0内容说明: Q——交点里程桩号;J 、K——交点X、Y坐标;R——圆曲线半径;F——前直线段正方位角;N——偏角;(即转向角)I——缓和曲线长;U——控制偏角条件;(左偏角输入“,1”,右偏角输入“+1”) H——缓和曲线段上任一点里程桩号;S——中桩至边桩距离;E——夹角;(左边桩输入“,E”,右边桩输入“E”)第8项——ZH点坐标第9项——HZ点坐标。
卡西欧fx-5800p计算器”单圆曲线计算“程序以及程序说明
单圆曲线(YQXJS)“KO”?O: “X0”?A:“Y0”?B:“JDX”?X:“JDY”?Y:“FWJ”?J:“FO”?F:?N:?R:6→DimZ←┘(K0为输入起算点桩号),(X0为输入起算点X坐标),(Y0为输入起算点Y坐标),(JDX输入曲线所在交点X坐标,无输入0),(JDY为输入曲线所在的Y坐标,无输入0),(FWJ为输入起算点的方位角),(F0为输入交点处的转角,带正负号,当左转时在转角前加-;右转时在转角前加+),(N为转角方向,正输入+1,负输入-1),(R为输入曲线半径)Abs(F)÷2→G◢“T=”:Rtan(G)→T◢(计算切线长)“L=”:GRπ÷90→L◢(计算圆曲线长)“E=”:R÷cos(G)-R→E◢(计算外距,即交点到QZ点的距离)LbI 1←┘?K:180N(K-O)÷(πR)→V:2Rsin(0.5NV)→M←┘(K为输入待求点的桩号)V为带求点与起算点间的弦长说对应的圆心角“XZ=”:A+Mcos(J+0.5V)→Z[1]◢(计算出的中桩X坐标)“YZ=”:B+Msin(J+0.5V)→Z[2]◢(计算出的中桩Y坐标)tan-1((Z[2]-Y)÷(Z[1]-X))→U←┘If U<0:Then U+360→U:Else U→U:If End←┘“FW=”?U :U DMS◢(计算出的中桩与交点的方位角)?W:“XL=”:Z[1]-NWcos(J+V+90)→Z[3]◢(W为输入路半宽,计算出的左边桩X坐标)“YL=”:Z[2]-NWsin(J+V+90)→Z[4]◢(计算出的左边桩Y坐标)“XR=”: Z [1]+NWcos(J+V+90)→Z[5]◢(计算出的右边桩X坐标)“YR=”:Z[2]+NWsin(J+V+90)→Z[6]◢(计算出的右边桩Y坐标)特别注意:1.进行反向计算(大桩号往小桩号计算)时,起算点桩号应设为0;待求桩号与起算点距离多远桩号就为多少;3.起算点方位角应与起算点之前的线形所对应的方位角一致。
fx-5800计算器编程共39页文档

第 1 页卡西欧Fx-5800P计算器一、Fx-5800P编程命令1、基本操作命令(1)分隔语句。
不停止程序的执行。
(2)(3)(4)2、关系运算子3、转移命令(1) n。
第 2 页(2)及后面的所有见容。
<变量>值为零,则会跳过语句1和语句2以及执行该命令后的所有内容。
(3)<变量>值非零,则执行语句1,然后执行语句2以及后面的所有见容。
<变量>值为零,则会跳过语句1和语句2以及执行该命令后的所有内容。
(4)4、控制结构命令:(1)(2)之间语句的执行重复进行,每次执行控制变量都加1(从始值开始)。
当控制变量的值到达终值时,执行会跳至Next后面的语句。
如果Next后面没有语句,则停止程序的执行。
(3)第 3 页(4)5、子程序调用命令(1)从当前程序(主程序)执行另一个其它程序(子程序)。
最多可以嵌套10层子程序。
6、程序控制命令(1)(2) 从子程序返回调用此子程序的程序。
在主程序中,此命令会终止程序。
(3) 强制终止程序执行。
在子程序中执行此命令会终止所有执行,包括所有子程序和主程序。
7、输入/输出命令(1) 返回如下代码之一(对应按的最后一个键)。
如果未按键,则返回0。
8、显示屏幕命令(1) 显示为注释文本。
(2) 清除显示器中的所有表达式和计算结果。
(3)在指定的屏幕位置显示指定值或字符串。
9、逻辑运算子命令(1)运算两端的表达式(相等或不相等),并基于它们的逻辑积返回真或假。
(2)运算两端的表达式(相等或不相等),并基于它们的逻辑积返回真或假。
(3)运算后面紧邻的表达式(相等或不相等),并返回其非值。
10、清除命令(1)清除所有列表数据。
(2)将所有变量清零。
(3)清除所有矩阵存储器的内容。
(4)清除所有公式变量。
二、Fx-5800P涵数命令1、绝对值2、正弦涵数3、余弦涵数4、正切涵数第 4 页三、fx-5800P计算器编程1、线路坐标计算[XLJS](主程序)使用说明(1)功能计算线路中桩、边桩坐标。
CASIOfx-5800p程序编写操作步骤
6/5
键 EXE 按 673.133 值程高点知已入输 键 EXE 按 193.133 值测观程高点知已入输 键 EXE 按 568.9347 值标坐 y 点知已入输 键 EXE 按 478.9347 值测观标坐 y 点知已入输 键 EXE 按 135.8493 值标坐 x 点知已入输 键 EXE 按 484.8493 值测观标坐 x 点知已入输 键 EXE 按、2 和之长全线导示显 419.9511 = ) D ( Σ 示显 键 EXE 按 和之长边点#6 至边始起示显 419.9511 =)6−1D(Σ 示显 键 EXE 按 和之长边点#5 至边始起示显 412.178 =)5−1D(Σ 示显 键 EXE 按 和之长边点#4 至边始起示显 295.746 =)4−1D(Σ 示显 键 EXE 按 和之长边点#3 至边始起示显 259.935 =)3−1D(Σ 示显 键 EXE 按 和之长边点#2 至边始起示显 956.663 =)2−1D(Σ 示显 键 EXE 按 „„� �边条 6 有 只线导本为因�0 入输都�8�S 和)7(S�意注�)8(S 到直键 EXE 按)1(S 入输 键 EXE 按”CPXDHB“序程开打、1 �下如作操体具序程的步六第 。序程有所除删为 seli F llA �序程定指除删为 eli F enO �序程除删�键�ETELED� �序程�改修或�辑编�键�TIDE� �序程行�运或�执�键�NUR� �序程建�新或�创�键�WEN� 4 3 2 1
面画程编建新现
出�键
1
5
EDOM
NO/CA
按�能功程编器算计入进、1
和之长边长全线导算计 ]02[Z ⟶N+M+W+G+E+C+B+A:”=)D(Σ“ W+G+E+C+B+A:” �6−1�DΣ“ G+E+C+B+A:” �5−1�DΣ“ E+C+B+A:” �4−1�DΣ“ �推类下以�和之边条三第至边始起算计 C+B+A:” �3−1�DΣ“ 和之边条二第至边始起算计 B+A:” �2−1�DΣ“ 据数长边各边线导入输 ↲N?”=)8(S“:M?”=)7(S“ :W? ”=)6(S“ :G? ”=)5(S“ :E? ”=)4(S“ :C? ”=)3(S“ :B? ”=)2(S“ :A? ”=)1(S“ 序程子和之长边算计 HZCB
卡西欧fx-5800p计算器 公路测量常用程序
FX-5800p计算器公路测量常用程序一、程序功能本程序由6个主程序、5个次子程序及5个参数子程序组成。
主要用于公路测量中坐标正反算,设计任意点高程及横坡计算,桥涵放样,路基开挖口及填方坡脚线放样。
程序坐标计算适应于任何线型.二、源程序1.主程序1:一般放样反算程序(①正算坐标、放样点至置仪点方位角及距离;②反算桩号及距中距离)程序名:1ZD-XYLb1 0:Norm 2F=1:(正反算判别,F=1正算,F=2反算,也可以改F前加?,改F为变量)Z[1]=90(与路线右边夹角)Prog"THB":F=1=>Goto 1:F=2=>Goto 2Lb1 1:Fix 3:"X=":Locate 6,4,X◢"Y=":Locate 6,4,Y◢Prog"3JS”:Goto 0:Lb1 2:Fix 3:"KM=":Locate 6,4,Z◢Goto 02.主程序2:高程序横坡程序(设计任意点高程及横坡)程序名:2GCLbI 0:Norm 2“KM”?Z:?D:Prog”H”:Fix3:”H=”:Locate 6,4,H◢“I=”: Locate 6,4,I◢Goto 03.主程序3:极坐放样计算程序(计算放样点至置仪点方位角及距离)程序名:3JSX:Y:1268.123→K(置仪点X坐标)2243.545→L(置仪点Y坐标,都是手工输入,也可以建导线点数据库子程序,个人认为太麻烦)Y-L→E:X-K→F:Pol(F,E):IF J<0:ThenJ+360→J:Int(J)+0.01Int(60Frac(J))+0.006Frac(60Frac(J)) →J:(不习惯小数点后四位为角度显示的,也可以用命令J◢DMS◢来直接显示) Fix 4:” FWJ=”: Locate 6,4,J◢(不习惯小数点后四位为角度显示的,也可以用命令J◢DMS◢来直接显示)Fix 3:”S=”:Locate 6,4,I◢4.主程序4:涵洞放样程序(由涵中心桩号计算出各涵角坐标、在主程序3中输入置仪点坐标后计算放样点至置仪点方位角及距离)程序名:4JH-XYLbI 0:Norm 290→Z[1](涵洞中心桩与右边夹角,手工输入,也可以修改成前面加?后变为变量)1→F:Prog”THB”:?L:Z[2]-Z[1] →E:X+Lcos(E) →X:Y+Lsin(E) →Y:Fix 3: "X=":Locate 6,4,X◢"Y=":Locate 6,4,Y◢Prog"3JS”:Goto 0:5.主程序5:路基开挖边线及填方坡脚线放样程序(输入大概桩号及测量坐标、地面标高计算出偏移距离、桩号、距中距离、填挖高度)程序名:5FBXLbI 0:Norm 2: 18→DimZ:2→F:90→Z[1]:Prog“THB”:Z:D:”M0”?M:M→Z[4]:D→Z[3]:Prog”6GD”:L→Z[6]:If D<0:Then 0.75-L→D:GotoH:Else L-0.75→D:Goto H:IfEndLbI H:Prog”H”:H-0.03-Z[4] →Z[5]:Z[6] →L:If Z[5]<0:Then –z[5] →G:Goto W:Else Z[5] →G:Goto T:LbI W:Prog “W0”:Z[10]+Z[11] →A: If G>A:Then Goto 1:Else If G>Z[10]:Then Goto 2:Else Goto 3:IfEnd:LbI 1:L+Z[12]+Z[13]+Z[14]+(G-A)×Z[9]+Z[11]×Z[8]+Z[10]×Z[7]:Goto Z:LbI 2:L+Z[12]+Z[13]+(G-Z[10])×Z[8]+Z[10]×Z[7]:Goto Z:LbI 3:L+Z[12]+G×Z[7]:Goto z:LbI T:L+0.5→N:If G>Z[17]:Then (N+Z[18]+(G-Z[17])×Z[16]+Z[17]×Z[15])→S:Goto Z:Else (N+G×Z[15])→S:Goto z:LbI Z:Z[3]→D:Fix 2:Abs(D)-S→T:”L0=”:L Locate 6,4,T◢"D=":Locate 6,4,D◢“TW=”: Locate 6,4,Z[5]◢Goto 06.主程序6:路基标准半幅宽度计算程序(对于设计有加宽渐变的有用,如路基宽度无变化,则把此程序直接输入半幅宽度值至L)程序名:6GDProg “G0”Z-C→E:(B-A)×E/S+A→L:L:7.坐标计算次程序(THB)程序名:THB18→DimZ:"KM"?Z:Prog "X0"1÷P→C: (P-R)÷(2HPR) →S:180÷π→E:F=1=>Goto 1:F=2=>Goto 2←┘Lbl 1:?D: Abs(Z-O) →W:Prog "A":X:Y:Goto 3LbI 2:X:Y:X→I:Y→J:Prog "B":O+W→Z:D→D:Goto 3LbI 3:IF F=1Then X:Y:Else Z:D8. 正算子程序(A)程序名:A0.1184634425→A: 0.2393143352→B:0.2844444444→N 0.046910077→K:0.2307653449→L:0.5→M: U+W(Acos(G+QEKW(C+KWS))+Bcos(G+QELW(C+LWS))+Ncos(G+QEMW(C+MWS))+Bcos(G+QE(1-L)W(C+(1-L)WS))+Acos(G+QE(1-K)W(C+(1-K)WS))) →X:V+W(Asin(G+QEKW(C+KWS))+Bsin(G+QELW(C+LWS))+Nsin(G+QEMW(C+MWS))+Bsin(G+QE(1-L)W(C+(1-L)WS))+Asin(G+QE(1-K)W(C+(1-K)WS))) →Y:G+QEW(C+WS)+Z[1]→Z[2]:X+Dcos(Z[2])→X: Y+Dsin(Z[2])→Y9. 反算子程序(B)程序名:BG-90→T: Abs((Y-V)cos(T)-(X-U)sin(T)) →W:0→D:Lbl 0:Prog "A": T+QEW(C+WS) →L: (J-Y)cos(L)-(I-X)sin(L)→D:IF Abs(D)<0.01:Then Goto1:Else W+D→W:Goto 0←┘Lbl 1:0→D:Prog "A":(J-Y)÷sin(Z[2]) →D:10.高程计算子程序(H)程序名:HProg “S0”:R:T:C:G:I:C-T→F:Z-F→L:C+T→E:G-TI→Q:If T=O:Then Q+LI→H:Goto 0:Else IfZ<F:Then Q+LI→H:Goto 0:Else If Z≤E:Then Q+LI+L2÷2÷R→H:Goto 0:LbI 0:H:If D=0:Then Goto I:Else Prog “I”:H+V→H:Goto I:LbI I:H:I:11.高程超高计算程序(I)程序名:IProg”I0”:W=1=> Goto 0:W=2=>Goto 1:LbI 0:If L=0:Then Abs(D)×M→V:Goto 2:Else Abs(D)×((N-M)×(Z-C)÷L+M)→V:Goto 2:IfEnd: LbI 1:If L=0:Then Abs(D)×M→V:Goto 2:ElseAbs(D)×(((3((Z-C)÷L)2-2((Z-C)÷L)∧(3))×(N-M))+M)→V:Goto 2:IfEnd:LbI 2:Abs(D)→E:V÷E→I:I(E-K)→V:12.数据子程序(附后示例)①程序名:X0(坐标计算要素程序)If Z≥25900 And Z≤26615.555:Then 25900→O:11587.421→U:1847.983→V:101。
CASIO Fx-5800P计算器测量计算程序

CASIO Fx-5800P计算器测量计算程序一、井下斜距改成平距和高差的计算程序“SJ=”?S:“CZJ=”?B:“YQG=”?C:“QSG=”?DS×cos(B)→LS×sin(B)-C+D→V“L=”:L◢“GC=”:V◢CLS说明:SJ→斜距;CZJ→垂直角;YQG→仪器高;QSG→前视高;L→平距;GC→高差。
二、测量基本控制导线坐标计算程序“L=”?L:“GC=”?V:“SBJ=”?AW+A→WIF W<180:Then W+180→W: Else W-180→W: IFEndIF W<360:Then W→W: Else W-360→W: IFEndIF W<360:Then W→W: Else W-360→W: IFEndX+L×cos(W)→X:Y+ L×sin(W)→Y:Z+V→Z“FWJ=”:W DMS◢“X=”:X◢“Y=”:Y◢“Z=”:Z◢CLS说明:(1)、把已知的X坐标先存入X、Y坐标存入Y、高程存入Z、方位角存入W(2)、L→平距;GC→高差;SBJ→水平角;FWJ→方位角;X→X坐标;Y→Y坐标;Z→高程。
三、井下测量导线坐标计算程序“SJ=”?S:“CZJ=”?B:“YQG=”?C:“QSG=”?D :“SBJ=”?A S×cos(B)→LS×sin(B)-C+D→VZ+V→ZW+A→WIF W<180:Then W+180→W:Else W-180→W:IFEndIF W<360:Then W→W:Else W-360→W:IFEndIF W<360:Then W→W:Else W-360→W:IFEndX+L×cos(W)→X:Y+ L×sin(W)→Y:Z+V→Z“L=”:L◢“GC=”:V◢“FWJ=”:W DMS◢“X=”:X◢“Y=”:Y◢“Z=”:Z◢CLS说明:(1)、把已知的X坐标先存入X、Y坐标存入Y、高程存入Z、方位角存入W(2)、SJ→斜距;CZJ→垂直角;YQG→仪器高;QSG→前视高;L →平距;GC→高差;SBJ→水平角;FWJ→方位角;X→X坐标;Y→Y坐标;Z→高程。
打桩程序CASIO-fx4850P(5800P)

10,Y=? 桩中心计算Y坐标, 11,T=? 桩的平面扭角 12,V=? 桩的斜率,直桩为0,斜桩输入设计值 13,H=? 桩的提高量,无提高输入0
第5页 共7页
Casio fx5800P计算器程序 (打桩程序)
计算结果如下: NA: 测站A点瞄准B点置角度0后的拨角值 1,W1=? 2,W2=? 3,W3=? NB: 4,W1=? 5,W2=? 6,W3=? NC: 7,W1=? 8,W2=? 9,W3=? 测站点A的左瞄准角 测站点A的右瞄准角 测站点A的船尾瞄准角 测站点B的左瞄准角 测站点B的右瞄准角 测站点B的船尾瞄准角 测站点C的左瞄准角 测站点C的右瞄准角 测站点C的船尾瞄准角
★
: -> ? S ? ? G
Z
P B B " C E
G
r : : : : :
★
o " " X " "
★
g X < -> Y Y A B C B C
Y g X X L
> : = " = = "
" Y " S " " ?
圆桩定位角[5800P] " S S " : = " ? A : > " : P r : Y -> D : = " ? D : = " ? F :
4
R : + ( i ) > t > :
->
S c W K
->
( o ) + G
->
) + ( S 7 0 l N
R s s W K o K
X
S : o ) ) : : T e G
CASIO fx-5800P计算器路线坐标高程计算程序
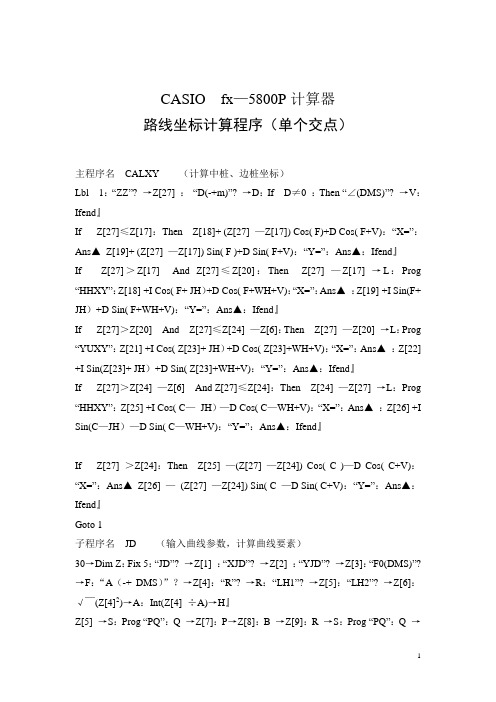
CASIO fx—5800P计算器路线坐标计算程序(单个交点)主程序名CALXY (计算中桩、边桩坐标)Lbl 1:“ZZ”? →Z[27] :“D(-+m)”? →D:If D≠0 :Then “∠(DMS)”? →V:Ifend』If Z[27]≤Z[17]:Then Z[18]+ (Z[27] —Z[17]) Cos( F)+D Cos( F+V):“X=”:Ans▲Z[19]+ (Z[27] —Z[17]) Sin( F )+D Sin( F+V):“Y=”:Ans▲:Ifend』If Z[27]>Z[17] And Z[27]≤Z[20]:Then Z[27] —Z[17] →L:Prog “HHXY”:Z[18] +I Cos( F+ JH)+D Cos( F+WH+V):“X=”:Ans▲:Z[19] +I Sin(F+ JH)+D Sin( F+WH+V):“Y=”:Ans▲:Ifend』If Z[27]>Z[20] And Z[27]≤Z[24] —Z[6]:Then Z[27] —Z[20] →L:Prog “YUXY”:Z[21] +I Cos( Z[23]+ JH)+D Cos( Z[23]+WH+V):“X=”:Ans▲:Z[22] +I Sin(Z[23]+ JH)+D Sin( Z[23]+WH+V):“Y=”:Ans▲:Ifend』If Z[27]>Z[24] —Z[6] And Z[27]≤Z[24]:Then Z[24] —Z[27] →L:Prog “HHXY”:Z[25] +I Cos( C—JH)—D Cos( C—WH+V):“X=”:Ans▲:Z[26] +I Sin(C—JH)—D Sin( C—WH+V):“Y=”:Ans▲:Ifend』If Z[27] >Z[24]:Then Z[25] —(Z[27] —Z[24]) Cos( C )—D Cos( C+V):“X=”:Ans▲Z[26] —(Z[27] —Z[24]) Sin( C —D Sin( C+V):“Y=”:Ans▲:Ifend』Goto 1子程序名JD (输入曲线参数,计算曲线要素)30→Dim Z:Fix 5:“JD”? →Z[1] :“XJD”? →Z[2] :“YJD”? →Z[3]:“F0(DMS)”? →F:“A(-+ DMS)”?→Z[4]:“R”? →R:“LH1”? →Z[5]:“LH2”? →Z[6]:√ ̄(Z[4]2)→A:Int(Z[4] ÷A)→H』Z[5] →S:Prog “PQ”:Q →Z[7]:P→Z[8]:B →Z[9]:R →S:Prog “PQ”:Q →Z[10]:P→Z[11] :B →Z[12] 』(R+ Z[8])Tan(A÷2)+ Z[7] —(Z[8] —Z[11]) ÷Sin(A)→Z[13] :“T1=”:Ans ▲(R+ Z[11])Tan(A÷2)+ Z[10] —(Z[8] —Z[11])÷Sin(A)→Z[14] :“T2=”:Ans▲』√ ̄((Z[13] —Z[7])2+( R+ Z[8])2) —R →Z[15]:“E=”:Ans▲R( A —Z[9] —Z[12] )÷57.2958+ Z[5] + Z[6] →Z[16]:“L=”:Ans▲』Z[1] —Z[13]→Z[17]:Z[2] —Z[13]Cos( F) →Z[18]:Z[3] —Z[13] Sin( F) →Z[19]:If Z[5]>0 :then Z[17] +Z[5]→Z[20]:Z[5] →L:Prog “HHXY”:Z[18] +I Cos( (F+ JH))→Z[21]:Z[19] +I Sin( (F+ JH))→Z[22]:(F+ WH)→Z[23] :Else Z[17]→Z[20]:Z[18]→Z[21]:Z[19]→Z[22]:F→Z[23]:Ifend』Z[17] + Z[16]→Z[24]:Z[2] +Z[14] Cos( (F+ Z[4]))→Z[25]:Z[3] +Z[14] Sin( (F+ Z[4]))→Z[26]:F+ Z[4] —180→C』Prog “CALXY”』子程序名PQS÷2—S3÷(240 R2)→Q:S2÷(24 R)—S4÷(2384 R3)→P:28.6479S ÷R→B』子程序名HHXYL—L5÷(40S2 R2)+L9÷(3456 R4S4) →X:L3÷(6S R)—L7÷(336S3 R3)+L11÷(42240 R5S5)→Y:28.6479L2÷(S R) →W:Pol(X,Y)』子程序名YUXY57.2958L÷R →W:RSin(W)→X:R(1—Cos(W))→Y:Pol(X,Y)』CASIO fx—5800P计算器路线坐标计算程序(单个交点)使用说明首先运行子程序“JD”,输入曲线参数,计算曲线要素。
[正反算]卡西欧 CASIO fx-5800P连算程序
![[正反算]卡西欧 CASIO fx-5800P连算程序](https://img.taocdn.com/s3/m/e4cb1bef81c758f5f61f6726.png)
CASIO fx-5800P坐标正反算程序[已核对]一、程序内容1、主程序名:ABCYTDeg:Fix 3Lbl 4:"1.DK=>XY":"2.XY=>DK":"J"?N:"DK"?S:Prog"CYT1"↙1÷P→C:(P-R)÷(2HPR)→D:180÷π→E:N=1=>Goto1:Goto2:↙Lbl 1:"W"?Z:Abs(S-o)→W:Prog"CYT2":"X=":X◢"Y=":Y◢F-90→F:"FWJ=":F▲DMS◢Goto4↙Lbl 2:?X:?Y:X→I:Y→J:Prog"CYT3":o+W→S:"DK=":S◢"W=":Z◢Goto4↙2、正算子程序名:CYT20.1739274226→A:0.3260725774→B:0.0694318442→K:0.3300094782→L:1-L→F:1-K→M:U+W(Acos(G+QEKW(C+KWD))+Bcos(G+QELW(C+LWD))+Bcos(G+QEFW(C+FWD))+Acos(G+QEMW(C +MWD)))→X:V+W(Asin(G+QEKW(C+KWD))+Bsin(G+QELW(C+LWD))+Bsin(G+QEFW(C+FWD))+Asin(G+QEMW(C +MWD)))→Y:G+QEW(C+WD)+90→F:X+Zcos(F)→X:Y+Zsin(F)→Y↙3、反算子程序名:CYT3G-90→T:Abs((Y-V)cos(T)-(X-U)sin(T))→W:0→Z:Lbl 0:Prog "CYT2":T+QEW(C+WD)→L:(J-Y)cos(L)-(I-X)sin(L)→Z:IF Abs(Z)<10^(-6):Then 0→Z:Prog "CYT2":(J-Y)÷sin(F)→Z↙Else W+Z→W :Goto 0:IfEnd↙4、数据库名:CYT1Goto1↙Lbl 1:IF S<7946.707:Then 98°56′56″→G:7586.707→o:3378605.445→U:453648.704→V:10^(45)→P:4500→R: 360→H: 1→Q:Return:IfEnd↙Lbl 1:IF S<11766.03:Then 101°14′26″→G:7946.707→o:3378544.714→U:454003.518→V:4500→P:4500→R: 3819.323→H: 1→Q:Return:IfEnd↙Lbl 1:IF S<12126.03:Then 149°52′11″→G:11766.03→o:3376389.890→U:457018.324→V: 4500→P: 10^(45)→R: 360→H: 1→Q:Return:IfEnd↙Lbl 1:IF S<13346.96:Then 152°09′41.68″→G:12126.03→o:3376073.846→U:457190.654→V:10^(45)→P: 10^(45)→R:1220.93→H:0→Q:Return:IfEnd↙CYT1数据库说明:Goto1↙表示同时保存多个曲线要素Lbl 1:IF S<***线元终点里程:Then***线元起点方位角→G:***线元起点里程→O:***线元起点X→U:***线元起点Y→V:***线元起点曲率半径→P:***线元终点曲率半径→R: ***线元起点至终点长度→H:0→Q:Return:IfEnd↙(H=0或1、-1,详情附后)。
卡西欧5800P计算器程序

卡西欧5800P计算器TYQXJSI坐标正反算(经过修改)1.主程序(TYQXJSI)10→DimZ:"1.SZ → XY":"2.XY → SZ":?N:"XO"? U:"YO"? V:"SO"? O:"FO"? G:"LS"? H:"RO"? P:"RN"? R:? Q: 1÷P→C:(P-R)÷(2HPR) →D:180÷π→E:If N=1: Then Goto 1: Else Goto 2: IfEndLbl 1:"DK? +?"? S:?Z: Abs(S-O)→W:If W>H or S<O: Then Stop: IfEnd : Prog "SUB1": "XS=”:X◢"YS=”: Y◢"FS=”:(F-90) →F:F DMS◢Goto 1Lbl 2:? X:? Y: "H"?A:X→I:Y→J:Prog "SUB2":If W>H or S<O: Then Stop: IfEnd :"DK?+?=”:O+W→S◢"Z”:Z◢Prog”NGDM”:Prog”OPRP1”:Goto 2IF N=2: Then If S<157188: Then Prog”OPRP1-100”:Else If S>157297: Then Prog”OPRP2-0”: ElseProg”OPRP1-50” IfEnd: IfEndElse If N=3: Then Prog”OPRP4”: IfEnd :IfEnd2. 正算子程序(SUB1)0.1739274226 →Z[3]:0.3260725774→B:0.0694318442→K:0.3300094782→L:(1-L) →F:(1-K)→M:(U+W(Z[3]cos(G+QEKW(C+KWD))+Bcos(G+QELW(C+LWD))+Bcos(G+QEFW (C+FWD))+ Z[3]cos(G+QEMW(C+MWD)))) →X:V+W(Z[3]sin(G+QEKW(C+KWD))+Bsin(G+QELW(C+LWD))+Bsin(G+QEFW( C+FWD))+ Z[3]sin(G+QEMW(C+MWD))) →Y:G+QEW(C+WD)+90→F:(X+Zcos(F))→X:(Y+Zsin(F))→Y注:Z[3]替代源程序A。
fx-5800P编程应用基础

第 7 页,共 8 页
常用程序编程案例
1 已知坐标正算边长与方位角计算程序。程序名 OK1
1 Deg:Fix 3 2 "XO="?A:"YO="?B 3 "XN="?C:"YN="?D 4 Pol((C–A),(D–B)) 5 J<0 J+360→J 6 "JL=":I◢ 7 "FWJ=":J DMS◢
Q 施工水准测量记录计算程序
7 QH4-6
Q 四等水准测量计算程序
8 QH4-7
Q 单一闭、附合图根水准测量近似平差程序
H母机程序
序 主程序 子程序
母机 功能说明
1 QH1-4 2 QH1-5 3 QH1-6 4 QH1-7 5 QH1-8 6 QH1-9 7 QH3-1 8 QH3-2 9 QH3-3 10 QH3-4 11 QH3-5 12 QH3-6 13 QH4-1 SUBQ4-11,4-12,4-13 4-14 14 QH4-2 15 QH4-3 SUBQ4-3 16 QH4-4 SUBQ4-4 17 QH4-5 18 QH4-6 19 QH4-7 20 QH4-8
Receiving. . . Cancel:[AC]
2. 然后在发送计算器(发送方)上执行以下操作 按[MODE] [1](LINK)[1](Transmit) [1](All)。
Transmit OK? Yes:[EXE] No:[EXIT]
3.发送完成后,屏幕显示
Complete ! Press:[EXIT]
设置角度单位为十进制,3 位固定小数显示 提示输入起点的坐标 提示输入端点的坐标 调用极坐标函数计算角度和距离 把小于 0 的角度换算成方位角 显示水平距离 显示方位角
卡西欧fx-5800p计算器测量程序
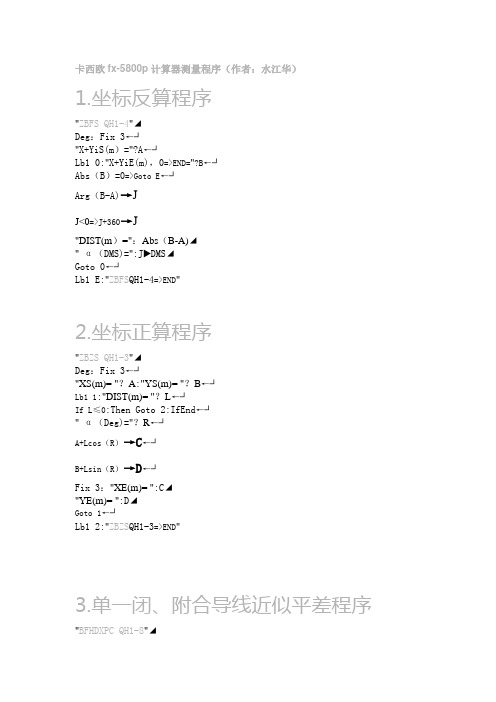
卡西欧fx-5800p计算器测量程序(作者:水江华)1.坐标反算程序"ZBFS QH1-4"◢Deg:Fix 3←┘"X+YiS(m)="?A←┘Lb1 0:"X+YiE(m),0=>END="?B←┘Abs(B)=0=>Goto E←┘Arg(B-A)→JJ<0=>J+360→J"DIST(m)=":Abs(B-A)◢"α(DMS)=":J▶DMS◢Goto 0←┘Lb1 E:"ZBFS QH1-4=>END"2.坐标正算程序"ZBZS QH1-3"◢Deg:Fix 3←┘"XS(m)= "?A:"YS(m)= "?B←┘Lb1 1:"DIST(m)= "?L←┘If L≤0:Then Goto 2:IfEnd←┘"α(Deg)="?R←┘A+Lcos(R)→C←┘B+Lsin(R)→D←┘Fix 3:"XE(m)= ":C◢"YE(m)= ":D◢Goto 1←┘Lb1 2:"ZBZS QH1-3=>END"3.单一闭、附合导线近似平差程序"BFHDXPC QH1-8"◢Deg:Norm 1:FreqOn←┘n→N←┘If List Y[N]=0:Then N-1→DimZ:Goto 0←┘Else N→DimZ:Goto 1: IfEnd←┘Lb1 0: "CLOSE Or CONECT TRA VE"◢"ANGLE NUM=":N◢"SIDE NUM=":N-1◢"UNKNOWN P NUM=":N-2◢"CLOSE(0),CONNECT(≠0)="?→Z←┘Fix 3:"XA(m),≤0=>αA→B(Deg)="?A←┘If A>0:Then "YA(m)= "?B:Else "αA→B(Deg)="?R:IfEnd←┘"XB(m)= "?C:"YB(m)= "?D←┘C+Di→U:U→V←┘If A>0:Then Pol(C-A,D-B):Cls←┘J<0=>J+360→J:J→R←┘"DIST A→B(m)=":I◢"αA→B(DMS)=":R▶DMS◢IfEnd←┘If Z≠0:Then "XC(m)= "?E:"YC(m)= "?F←┘E+Fi→V←┘"XD(m),≤0=>αC→D(Deg)="?G←┘If G>0:Then "YD(m)= "?H←┘Pol(G-E,H-F):Cls←┘J<0=>J+360→J:J→S←┘"DIST C→D(m)=":I◢"αC→D(DMS)=":S▶DMS◢Else "αC→D(Deg)="?S:IfEnd←┘Else If R>180:Then R-180→S:Else R+180→S:IfEnd←┘IfEnd←┘∑y→M←┘For 1→I To N←┘If I=1:Then R+List X[I]→L:Else L+List X[I]→L:IfEnd←┘If L>180:Then L-180→L:Else L+180→L:IfEnd←┘Nent←┘3600(L-S)→T←┘"α CLOSE ERROR(S)=":T◢40→W←┘Abs(T)>W=>"α CLOSE ERROR OVRE!"←┘-T÷N÷3600→P:0→O←┘For 1→I To N←┘If I=1:Then R+List X[I]+P→L←┘Else L+List X[I] +P→L:IfEnd←┘If L>180:Then L-180→L:Else L+180→L:IfEnd←┘If I<N:Then List Y[I]<L→Z[I] :Z[I]+O→O:IfEnd←┘Nent←┘3600(L-S)→T←┘"CHECK α CLOSE ERROR(S)=":T◢U+O-V→O←┘Int(M÷Abs(O))→K←┘"DELTA X(m)= ":ReP(O)◢"DELTA Y(m)= ":ImP(O)◢"RELAT CLOSE ERROR=1÷":K◢K<4000=>"RELAT CLOSE ERROR OVER! "←┘For 1→I To N-1←┘Z[I]-OList Y[I]÷M→X←┘If I=1:Then U+X→Y:Else Y+X→Y:IfEnd←┘Norm 1:"POINT n=":I◢Fix 3:"X(m)= ":ReP(Y)◢"Y(m)= ":ImP(Y)◢Nent←┘Y-V→Q←┘"CHECK X (m)= ":ReP(Q)◢"CHECK Y (m)= ":ImP(Q)◢Goto E←┘Lb1 1:"NO DIRECT TRA VE"◢"ANGLE NUM=":N-1◢"SIDE NUM=":N◢"UNKNOWN P NUM=":N-1◢"XA(m)= "?A:"YA(m)= "?B←┘"XB(m)= "?C:"YB(m)= "?D←┘A+Bi→U:C+Di→V←┘0→H:U+List Y[1]<H→Z[1]←┘For 1→I To N-1←┘H+List X[1]→H←┘If H>180:Then H-180→H:Else H+180→L:IfEnd←┘以下未完程序由读者完成。
卡西欧fx-5800P程序

卡西欧fx-5800P程序1坐标反算(ST)Lb1 1:"X1="?A:"Y1="?BLb2 2:"X2="?C:"Y2="?D"S(1-2)=":POL(C-A,D-B)→S▲IF J﹥0:Then J→T:Else J+360→T:If End"T=":T→DMS▲"K="?KIf K=1:Then Goto1:If EndIf K=2:Then Goto2:If EndIf K=3:Then C→A:D→B:Goto 2:If End 0说明:1、首先输入架站点坐标X0、Y0(O点)。
2、再输入后视点坐标XP、YP(P点)。
3、计算出O―P的边长S和方位角J。
4、当K=1时,重新输入O、P点的坐标。
5、当K=2时,以原O点坐标不变,重新输入新P点坐,计算出边长S和方位角J。
6、当K=3时,以原P点坐标为架站点坐标O(X0、Y0),重新输入新的P点坐标,计算出边长S和方位角J。
2 坐标正算(XY)LbI 0:"X0="?A:"Y0="?B:"P(1→Z,2→F)="?PIf P=1:Then Goto2:Else Goto5:If EndLbI 2:"XA="?C:"YA="?D"S(0-A)=":POL(C-A,D-B)→S▲IF J﹥0:Then J→F:Else J+360→F:If End"T(0-A )=":F→DMS▲Goto6Lb1 5:"T(0-A )="?FLb16:"S(0-P )="?S:"E(∠AOP=)"?EE+F→T:"XP=":A+Rec(S,T) →X▲"YP=":B+J→Y▲If T≥360:Then T-360→T:If End"T(0-P)=":T→DMS▲"K="?KIf K=1:Then Goto0:If EndIf K=2:Then Goto6:If EndIf K=3:Then X→A:Y→B:T+180→F:Goto6:If End说明:1、首先输入架站点O(X0、Y0)坐标2、输入判断值P: 当P=1时输入后视点的坐标,计算出到后视点距离"S(0-A)="S和方位角T(0-A )=F; 当P=2时直接输入后视点的方位角T(0-A )=F。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Prog FXA
Norm 1:?N:N=2=>Goto 0:N=2=>Goto 1:“ =”: ◢
“X0+Y0i”?M:List X[M]+List Y[M]i->C:Lb1 0“X+Yi”?T:T=0=>Goto 1:T->K:?L:List X[T]+List Y[T]i->B:Fix 3:“D=”:Abs(B-C->D◢ Arg(B-C->A:A<0=>A+360->A:“A=”:A▶DMS◢ “X,Yi”:B◢ Norm 1:O->X:Goto 0: Lb1:?X:X=0=>Goto 0:X->O:?Y:?H:X+Yi->S:Abs(S-C->I:Fix 3: If S>D:Then“DV=”:Locate 5,4,I:Else “D∧=”:Locate 5,4,I:IfEnd:Arg(E-C->J: J<0=>J+360->J:J-A->J:J<0=>J+360->J:Abs(Ssin(J->I:If >180:Then “=>”: Loca te 4,4,I:Else“<=”:Locate 4,4,I:IfEnd:Abs(H-L->I:If H>L:Then“hV=”:Locat e 5,4,I◢ Else“h∧=”: Locate 5,4,I◢ IfEnd:K->T:Norm 1:Goto 1:“END”
Abs(A-C Abs((4281.739+3592.881i)-(3885.634+3114.471i) =621.1081219
(1)、计算方位角 Arg(A-C
Arg((4281.739+3592.881i)-(3885.634+3114.471i) =50°22′35.6" 计算出的角度为负时加上 360 度即可。格式中两点坐标的输入顺序与采用 Pol(一样,
即后视点(计算点)在前,测站点在后。
1.2、程序中输入与调出复数
(1)、利用 List X、List Y 统计串列计算(SD/REG) 可以利用计算器中的统计计算进行复数的计算,SD 模式用于单变量计算(X),REG 模式 用于双变量计算(X,Y)。而 REG 模式可以充分利用在坐标的计算中。MODE->3 就进入 SD 模 式,MODE->4 就进入 REG 模式,在其中输入(存入)相应的数据,然后在相应的程序中调取 该值。最多可以输入 199 个数据,输入的数据直到删除与使用复位计算器时才会丢失数据。 在 SD 模式下,虽然只显示 X 值,但计算器内部会对 X 值提供一个 Y 值,只不过始终为 0 而 已。
则点 B 的测量坐标为:E+1 FW->C=98024.758
+11465.466i 使用 FUNCTION->2->ReP(->C 就可单独提取出 98024.758(X 值) 使用 FUNCTION->2->ImP(->C 就可单独提取出 11465.466(Y 值)
且行天涯
804963666
2
FX5800 卡西欧计算器应用及程序
第一章 计算器语法与模型
一、复 数 部 分
1.1、计算中的复数形式
5800P 计算器只能对直角坐标与极坐标表示的复数进行计算,其数学表示形式分别如 下:
(1-1)
(1-2)
要求
在计算器中的表示格式为:
为复数的实部(测量系中的 X 坐标), 为复数的虚部(测量系中的 Y 坐标)。 例:A 点坐标为 X=3885.634,Y=3114.471。计算器中以复数表现形式为: 3885.634+3114.471i 输入计算器储存单元顺序是 3885.634+3114.471i->SHIFT->RCL->B 这样 A 点的坐标数据就储存进单元 B 了。 提取坐标可用 FUNCTION->2->ReP(->B 就可提取出 X 坐标,用 FUNCTION->2->ImP(->B 就可提取出 Y 坐标。 1.2、测量的使用 测量中使用复数形式主要是用于反算边长、方位角。具体应用是分别将两点的坐标数 据存入相应单元中。如有 A、C 两点,其坐标 A 点同上,C 点 X=4281.739,Y=3592.881。 (1)、计算边长
1、以
形式输入坐标的复数并存入相应的单元后,就可以使用复数运算命令提取
单元中的复数了。例(坐标换算的尺度比例计算) 旧坐标 2505788.356+406164.803i->SHIFT->RCL->A 2493038.151+405552.812i->SHIFT->RCL->B 新坐标 55500.563+48677.583i->SHIFT->RCL->C 42748.292+48142.600i->SHIFT->RCL->D 新旧坐标边长(尺度)比例计算(复数显示):(C-D)÷(A-B)=0.9998906361 -6.033622934×10-3i 0.9998906361 就是尺度比例。 新旧坐标角差计算:Arg(C-D)÷(A-B)=-0°20"44.67"
据目录(个数)是利用“ ”,按 FUNCTION->7->2->1->EXE 就可以看到个数了。
在程序中调用统计储存器中的数据时,是利用 List 调用的。具体格式如下: List X[A]+Y[A]i->C
式中 A 是点号,C 是任意储存单元。具体示例详见“程序部分”->“极程序放样” (2)、利用统计计算(SD/REG)
X0+Y0i:测站点号
X+Yi:放样点点号
L、放样点设计高程(m)
1、X+Yi=0 进入放样程序段,X+Yi≠0 继续计算放样点边长与方位角
※输出
D=:放样点到测站边长(m)
A=:放样方位角
X,Yi:放样点坐标(以供检查)(m)
说明:必须首先进入 REG 模式,将表 1 中的坐标输入到统计储存器中。本例中测为 1 号点,后视为 2 号点。
且行天涯
804963666
1
FX5800 卡西欧计算器应用及程序
插入行,在 SD 或 REG 模式下将光标移到要插入行的位置,按 FUNCTION->5->1->1 就可 以在光标所处的行的上面行插入新行了。需要删除输入的数据时,在 SD 或 REG 模式下按 FUNCTION->5->1->2 再“确认”就可删除统计储存器中的数据。需要查看统计储存器中的数
FX5800 卡西欧计算器应用及程序
第二章 程 序 部 分
2.1 工程测量
2.1.1、极坐标放样(复数编程)
程序执行条件 ※已知条件
N:执行程序选择 1、 N=0 至输入测站和后视程序点号段; 2、 N=1 至输入放样点点号程序段(直接放样); 3、 N=2 至计算放样方位角、边长程序段。
=:显示统计储存器中储存的点数
2、以 形式计算。以坐标换算为例:
坐标重合点 A 旧坐标 98042.831->SHIFT->RCL->A 11430.122->SHIFT->RCL->B A+Bi->E 新坐标值均为零,就不必另行输值,新旧坐标方位角差值 69°56"23"->W。 要求计算施工坐标 X=27,Y=29.1 的 B 点的测量坐标。 计算赋值:27->U,29.1->V。U+Vi->F