51单片机与触摸屏通讯实例
51单片机触摸屏手写程序

/*-- 文字: " --*/
/*-- 宋体9; 此字体下对应的点阵为:宽x高=6x12 --*/
/*-- 宽度不是8的倍数,现调整为:宽度x高度=8x12 --*/
0x00,0x28,0x50,0x50,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
/*-- 文字: + --*/
/*-- 宋体9; 此字体下对应的点阵为:宽x高=6x12 --*/
/*-- 宽度不是8的倍数,现调整为:宽度x高度=8x12 --*/
0x00,0x00,0x20,0x20,0x20,0xF8,0x20,0x20,0x20,0x00,0x00,0x00,
//8*12字符
unsigned char code zifu[]={
/*-- 文字: --*/
/*-- 宋体9; 此字体下对应的点阵为:宽x高=6x12 --*/
/*-- 宽度不是8的倍数,现调整为:宽度x高度=8x12 --*/
0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,
sbit DIN = P3^4;
sbit BUSY = P3^5;
sbit DOUT = P3^6;
sbit IRQ = P3^7; //检测触摸屏响应信号
unsigned int TP_X,TP_Y; //当前触控坐标
/*-- 文字: ; --*/
/*-- 宋体9; 此字体下对应的点阵为:宽x高=6x12 --*/
/*-- 宽度不是8的倍数,现调整为:宽度x高度=8x12 --*/
/*-- 文字: / --*/
TFT触摸屏使用说明

2一、.4寸TFT 触摸屏使用说明要正确使用TFT 触摸屏,需要借助相应的单片机实验板,这里,以顶顶电子开发板DD-900实验开发板为例进行介绍,值得庆幸的是,DD-900上设有3V 电压输出端,因此,可以方便地为TFT 触摸屏供电。
TFT 触摸屏模块介绍随着TFT 触摸屏价格的不断下降,其应用也越来越广泛,学习TFT 触摸屏现已成为一种时尚,以前,很多人只有在ARM 单片机中才能看到TFT 触摸屏的风采,现在,随着51单片机性能的提高,51单片机也能玩TFT 触摸屏了,这里,我们介绍的是一款2.4寸TFT 触摸屏模块,其正面与反面外形如图所示:这款触摸屏模块主要具备如下特点:1.2.4寸320*240 ,65K/262K 色;2.屏带PCB 板, PCB 板设有2.4寸液晶屏、SD 卡座、触摸屏控制芯片ADS7843,通过40脚插针将屏、卡座和触摸芯片功能引脚,引脚间距为2.54mm ,采用杜邦线可十分方便地与单片机进行连接。
PCB 引出脚排列及功能如图所示:3.屏设置为8位,用户也可根据实际情况设置为16位。
4.控制IC 为ILI9325。
二、供电及连接说明DD-900实验开发板采用的是5V 供电,因此,单片机应采用5V 单片机,如STC89C516RD+、STC12C5A60S2等,晶振采用30M ,注意TFT 要采用3V 供电,否则有可能烧屏,TFT 与单片机连接时可加限流电阻,电阻大小为470欧左右,也可以不加,但单片机不可设置为推挽模式,各引脚连接如下: TFT 触摸屏 DD-900实验开发板 说明 GND GND 屏与背光供电VCC 3V LED+ 3V DB8~DB15 P00~P07 液晶屏部分DB0~DB7不连接(这里采用是8位方式,不用连接)RS P26 WR P25 RD P24 CS P27 RES P23 D_CLK P21 触摸控制部分D_CS P20 D_DIN P22 D_BUSY P34 D_DOUT P33 D_Penirq (中断) P35 SD_OUT 根据程序进行定义 SD 卡座部分(前两个实验,此部分未采用) SD_SCK 根据程序进行定义SD_DIN根据程序进行定义SD_CS 根据程序进行定义注意:在TFT 的PCB 板上标有TFT 的引脚功能,一定要认清管脚与标注的对应关系。
常见触摸屏、PLC、RS485通信的常见问题问答
威纶触摸屏:请教mt506的一屏多机问题大家好,最近碰到一个难解的问题。
向各位前辈请教我最近用1台MT506通过串口1带4台设备,通过MODBUS RTU 485方式,一开始我通过电脑直接在线仿真的方式模拟,与四台设备正常通讯,没有任何异常。
但是把程序下载到屏里后,就出现通讯不稳定的情况。
情况如下1 用电脑直接在线模拟屏,与4台设备进行通信,通过串口工具监视通信数据,完全正常。
说明程序没有问题。
2 程序下载到屏里后,屏与4台设备进行通信,通信不稳定,通过检测通信数据发现,可能会出现,通信十几组数据后,发生通信中断,通信停止系统参数设定值(3.0)后,继续进行通信,再正常通讯十几组或更多数据后,再次发生中断,中断时交换的数据并不确定。
3 序里的地址均改为地址1#时,通过串口工具检测,通信完全正常。
但是加入其它地址如2# 后,通信再次出现偶然一次通信中断的情况。
4 现场做了大量防干扰的措施,另外也不认为是干扰搞的,因为3 中地址均为1#时,没有问题。
当出现一定次数的中断后,通信就完全中止,等一定时间后又重新进行通信。
被这个问题搞的很头疼,请教前辈们,大家有这样用过的么,能分享经验么,感激。
这两天再搞不定这事,打算换屏了,没太大兴趣搞威伦的了,威论技术支持的水平与态度让人有点生气。
“我不知道” ,“我没试过”听的太多了。
谢谢大家想用一台触摸屏做好两个控制画面,来分别控制两台224XP,请问通讯线怎么连?PLC中程序要怎样做?请祥解问题补充:我用的屏是WEINVIEW MT510TV,先用编程软件把两台224XP设为不同的站号,例如PLC2和PLC3,然后在做屏读取I/O点数据的时候(其它的一样道理),怎么才能分别读第一个plc里面的数据,就选择站号为2的那台PLC,要读第二个plc里面的数据,就选择站号为3的那台PLC?是否一定要定义PLC的主从站,和一定要用NETR,NETW指令?这个要咨询触摸屏厂家。
51单片机buf用法

51单片机buf用法单片机(Microcontroller)是指将微处理器与外部存储器、输入/输出接口及定时器等外围电路集成在一块芯片上的一种微型计算机系统。
而51单片机则是指来自Intel早期生产的一款经典单片机,即Intel 8051。
在51单片机的编程中,BUF(Buffer)是一种常用的功能模块,用于数据的缓冲、传输和处理等操作。
本文将介绍51单片机BUF的基本用法,以及一些常见的应用案例。
一、BUF的基本概念BUF是一种常见的数据缓冲模块,通常由寄存器和状态控制逻辑构成。
其主要作用是在不同模块之间进行数据的传输和处理,起到缓冲数据的作用。
BUF可以分为输入BUF和输出BUF两种类型。
输入BUF接收外部输入信号,将其缓存在寄存器中,以供后续的处理使用。
而输出BUF则将经过处理后的数据从寄存器中输出,发送给外部器件或其他模块。
BUF的主要功能是防止信号的损失和传输延迟,提高数据的稳定性和可靠性。
二、BUF的用法在51单片机中,通过设置寄存器和相关的逻辑控制,实现对BUF的配置和使用。
以下是BUF的一些常见用法:1. 数据的输入和缓冲首先,通过将BUF的输入引脚与外部输入信号相连,将外部输入数据传递给BUF。
然后,将BUF的输出引脚与寄存器相连,通过设置寄存器的控制位,将输入数据缓存在寄存器中。
例如,假设我们需要从外部输入一个模拟信号,并将其用于后续的数据处理。
我们可以使用一个BUF模块将该模拟信号缓存到寄存器中,以供后续的处理使用。
2. 数据的处理和传输一旦输入数据被缓存在寄存器中,我们可以对其进行各种数据处理操作。
比如,可以进行数据的加减运算、位操作、逻辑运算等。
完成数据处理后,我们可以将处理结果传输到其他模块或输出端口,以实现数据的进一步应用。
通过BUF的输出引脚和寄存器的相关设置,可以将处理结果输出到指定的位置。
3. 数据的输出和发送BUF还可以用于将数据发送到外部器件或其他模块。
通过设置BUF的控制位和输出引脚,可以将寄存器中的数据输出并发送。
单片机与触摸屏的接口技术及实现方法

单片机与触摸屏的接口技术及实现方法一、引言随着科技的不断发展,触摸屏已经成为现代电子设备中不可或缺的一部分。
触摸屏使用起来方便,操作灵活,广泛应用于智能手机、平板电脑、工业控制、医疗设备等领域。
而单片机作为嵌入式系统中的重要组成部分,负责接收、处理和控制各种外设设备,与触摸屏的接口技术及实现方法是我们需要关注和深入了解的内容。
二、单片机与触摸屏的接口技术1. 串行接口串行接口是常见的单片机与触摸屏的连接方式。
其中,常用的有SPI(串行外设接口)、I2C(串行外设接口)等。
串行接口具有简单、灵活、适用于长距离传输的特点。
2. 并行接口并行接口是单片机与触摸屏之间的另一种常用的连接方式。
并行接口通过多根线传输数据,使得数据传输速度更快,但是需要占用更多的引脚和硬件资源。
3. USB接口USB接口(通用串行总线接口)是一种高速、热插拔的接口方式。
通过USB接口连接单片机和触摸屏,可以快速传输数据,适用于需要高速数据传输的场合。
三、单片机与触摸屏的实现方法1. 软件实现在软件实现中,我们可以使用单片机的GPIO(通用输入输出)端口将触摸屏的接口引脚与单片机相连。
通过程序编写,实现单片机对触摸屏的控制和数据读取。
2. 硬件实现硬件实现包括通过外部电路芯片来实现单片机与触摸屏的连接。
常见的外部电路芯片有ADS7843、ADS7846等。
这些芯片可以通过SPI接口或I2C接口与单片机进行通信,实现对触摸屏的控制和数据读取。
四、单片机与触摸屏的典型应用1. 智能手机智能手机是单片机与触摸屏技术最广泛应用的领域之一。
通过单片机与触摸屏的接口技术,实现对手机触摸屏的控制和数据读取,使得用户可以通过触摸屏方便地进行操作和控制。
2. 平板电脑平板电脑是另一个需要单片机与触摸屏技术配合的领域。
通过单片机与触摸屏的接口技术,实现对平板电脑触摸屏的控制和数据读取,使得用户可以通过平板电脑触摸屏进行多点触控操作。
3. 工业控制单片机与触摸屏的结合在工业控制领域也得到了广泛应用。
TFT2.8_V2.2使用手册

7
合肥炜煌电子有限公司
TFT2.8_V2.2 使用手册
SD卡使用如下: 1、SD卡要格式化成FAT(即FAT16格式),然后把需要显示的大小为320x240像素的bmp格式图片 通过Image2LCD软件转换成bin格式并存储到SD卡中。 注意:SD卡中不能存储其他任何文件,使用之前一般需要先格式化,否则可能导致图片输出 不完整。 图片存储到SD卡后,可以通过winhex软件(打开winhex.exe,点击Tools->Open Disk找到SD卡打 开)查看各图片存储的地址。打开软件如图所示,点击第一张图片“车.bin”,所有图片在SD卡中 是依次存放的,读图片也是依次进行的。看上图中左下角圈起来的2个数字,上面的物理扇区编号, 下面的是逻辑扇区编号,那么对应的地址就是769x512=393728,这个是1G卡FAT格式化后的初始数 据。不同容量的SD卡的初始地址不同,请使用winhex软件查看对应的物理扇区编号,并计算出对应 的地址,然后在样例中图示标记位置进行更改。
典型触摸屏的结构一般由三部分组成:两层透明的阻性导体层、两层导体之间的隔离层、电极。
触摸屏工作时,上下导体层相当于电阻网络。当某一层电极加上电压时,会在该网络上形成电
压梯度。如有外力使得上下两层在某一点接触,则在电极未加电压的另一层可以测得接触点处的电
压,从而知道接触点处的坐标。比如,在顶层的电极(X+,X-)上加上驱动电压,则在顶层导体层上形
2.1.1 FPC 接口电路 ..............................................................................................................................................4 2.1.2 触摸控制电路............................................................................................................................................5 2.1.3 IO 扩展电路 ................................................................................................................................................6 2.1.4 电源电路....................................................................................................................................................7 2.1.5 SD 接口电路................................................................................................................................................7 2.1.6 TFT 控制接口电路 ....................................................................................................................................10 2.2、程序控制实例(以 51 单片机控制为例介绍) .........................................................................................12 2.2.1 实例一、字符、汉字、画线显示实验 ..................................................................................................12 2.2.2 实例二、触摸屏画图演示实验 ..............................................................................................................14 2.2.3 实例三、触摸屏控制直流电机实验 ......................................................................................................16 2.2.4 实例四、电子相册-SD 卡图片读取显示实验 .......................................................................................18
单片机与人机交互触摸屏按键和显示屏的应用
单片机与人机交互触摸屏按键和显示屏的应用现代科技的迅速发展,使得人机交互成为了当下热门的领域之一。
作为人类与电子设备之间的桥梁,触摸屏按键和显示屏的应用在我们的日常生活中扮演着越来越重要的角色。
而单片机则作为嵌入式系统中最为常见的控制器,与触摸屏按键和显示屏的结合,不仅提升了用户交互体验,也为我们的生活带来了便利。
本文将深入探讨单片机与人机交互触摸屏按键和显示屏的应用。
一、触摸屏按键的应用触摸屏按键是一种新型的人机交互界面,它通过电容或者压力等方式感应用户的点击动作,并将点击位置信号转换为电信号输入,从而实现对设备的控制。
单片机通过与触摸屏按键的连接,可以实现多种功能。
1.1 触摸屏按键在智能手机中的应用随着智能手机的普及,触摸屏按键已经成为了目前手机最常见的操作方式之一。
通过单片机与触摸屏的连接,我们可以轻松实现对手机屏幕的触摸操作,包括滑动、点击、放大缩小等。
这不仅提高了手机的操控性,也为用户带来了更好的使用体验。
1.2 触摸屏按键在工业控制领域的应用在工业控制领域,触摸屏按键的应用也越来越广泛。
通过与单片机的连接,我们可以将触摸屏作为控制设备的输入端口,实现对各种设备的控制和监控。
例如,在一些工厂中,工人可以通过触摸屏按键来控制生产线的开关、调整设备参数等,大大提高了生产效率。
二、显示屏的应用显示屏作为人机交互的重要组成部分,具有信息输出的功能,将数据以人类可读的形式展示出来。
单片机通过与显示屏的连接,可以实现对数据的显示和处理,提升用户交互的体验。
2.1 显示屏在计算机领域的应用在计算机领域,显示屏是我们与计算机最直接的交互方式之一。
通过单片机与显示屏的连接,我们可以输出文字、图像、视频等多种形式的信息。
这不仅使得计算机的操作更加直观,也为我们提供了更方便的信息交流方式。
2.2 显示屏在仪器仪表领域的应用在仪器仪表领域,显示屏的应用也非常广泛。
通过单片机与显示屏的连接,我们可以将各种测量数据以数字或者图形的形式显示出来,方便用户进行实时监测和数据分析。
基于ADS7846的电阻式触摸屏接口设计
基于ADS7846的电阻式触摸屏接口设计作者:王选民, 李明利, 张利川, 张晓博来源:《现代电子技术》2010年第11期摘要:分析了电阻式触摸屏的结构,确定了触摸点坐标校正的方法。
针对51系列单片机与触摸屏控制器ADS7846串行通信时,单片机串口方式1~3与ADS7846时序不相配,而方式0虽然与ADS7846时序相配,但输入/输出端数不相配。
为此,提出了在单片机串口方式0的基础上增加双向传输GAL芯片,并据此设计了触摸屏接口电路及软件。
分析和实验表明,这种接口系统能够正确获得触摸点坐标,电路简化且易于实现,实用性强。
关键词:电阻式触摸屏;触摸屏控制器;触摸点坐标;接口电路;串行通信中图分类号:TP334.2 文献标识码:A文章编号:1004-373X(2010)11-0088-03Interface Design of Resistive Touch Screen Based on ADS7846WANG Xuan-min, LI Ming-li, ZHANG Li-chuan, ZHANG Xiao-bo(School of Information Engineering, Chang’an University, Xi’an 710064, China)Abstract: The structure of resistive touch screen is analyzed, and the revision method of touch point coordinate is determined. For serial communication of the 51 SCM and touch screen controller ADS7846, the time order of SCM serial way 1~3 and ADS7846 was unsuitable. Way 0 time order was suitable, but input/output number was different. Adding two-way chip GAL on SCM serial way 0 was proposed. On the ground, the touch screen interface circuit and software were designed. The analysis and experiment indicate that interface circuit possessed below advantages. Touch point coordinate can be obtained accurately, the circuit is realized easily, and its practicality is good.Keywords: resistive touch screen; touch screen controller; touch point coordinate; interface circuit; serial communication触摸屏作为智能仪器、仪表的输入设备,是具有简单、方便、自然的人机交互方式。
台达触摸屏与单片机通讯说明

台达触摸屏与单片机通讯说明1、新建项目,选择您的触摸屏型号,点下一步;
2、通讯设定:最左边的COW是根据您的具体接线选择而勾选的;在控制器下拉框中选择MODBU前片机中需写标准的MODBUS议),按照您的单片机程序进行选择,不论是ASCII或者RTU需将触摸屏选择MASTER主)。
选择好此栏后,下面的“一般”对具体的通讯参数进行设备,如站号,通讯方式(232、485),停止位、波特率等,这些选择需与单片机中的程序一致才能通讯上。
选择好后点完成,就可以编写人机画面了。
3、接线
232:触摸屏端9针母头:2(RX)、3(TX)、5(GND)
485:触摸屏端9针母头:1(D+)、6(D-)。
迪文HMI的C51开发指南
C51开发迪文HMI指南1.串口通信处理//串口的处理,串口接收采用中断方式,串口发送采用查询方式sbit TIFLG=0; //串口发送标记sbit HMIFLG=0; //触控界面数据接收标记uchar data HMI_Page,HMI_Key; //触控界面传回来的当前页面位置和按键编码uchar xdata cmd[8];void Serial_Int(void) interrupt 4{ if(TI==1){ TI=0;TIFLG=1;} //TIFLG在作为其它程序的查询标记if(RI==1){ cmd[0]=cmd[1]; //触控界面下,接收触摸按键数据 AA 78 K0 K1 CC 33 C3 3Ccmd[1]=cmd[2]; //采用移动窗口方式接收cmd[2]=cmd[3];cmd[3]=cmd[4];cmd[4]=cmd[5];cmd[5]=cmd[6];cmd[6]=cmd[7];cmd[7]=SBUF;RI=0;}if((cmd[0]==0xaa)&&(cmd[1]==0x78)&&(cmd[4]==0xcc)&&(cmd[5]==0x33)&&(cmd[6]==0xc3)&&(cmd[7]==0x3c)) { HMIFLG=1; //置位触控界面标记,主程序中查询处理HMI_Page=cmd[2];HMI_Key=cmd[3];}}//查询方式发送数据到串口//发送一个字节void Txbyte(uchar i){TIFLG=0;SBUF=i;While(TIFLG==0);TIFLG=0;}//发送一个以0xCC 0x33 0xC3 0x3C为结束标记的数据串到串口void Txstring(uchar *str){uchar i0,i1,i2,i3;i0=0;i1=0;i2=0;i3=0;TIFLG=0;while(!((i0==0xcc)&&(i1==0x33)&&(i2==0xc3)&&(i3==0x3c))){i0=i1;I1=i2;I2=i3;i3=*str;str++;SBUF=i3;While(TIFLG==0);TIFLG=0;}}2.I/O后台程序的处理使用一个定时器产生一个定时器中断,来刷新I/O状态、采集设备信息,或对设备的控制;比如,我们可以使用一个100mS的定时器,定时来进行A/D转换,采集温度信息;对于多路信息的采集,如果每一路的处理时间比较长,就应该把任务分解成“节拍”来分成几次中断来执行,以保证其它中断程序能够被可靠执行,并提高CPU的执行效率。
51单片机的触摸屏系统的应用

表3向PLC软设备写入数值
位ADR_S—L(X和Y地址为十进
开始命令首地址
位数
数据
结束和校验
31 H,30
33 H,34 H,31 H,32
02 H 31 H
H,30 H.34 H
H,03 H 34 H,39 H
’
46 H,36 H
43 H,“H,4l H,42 H,
制,从0开始往上数0对yo,1对 ylxl…8对y10x10,9对yllxll); 3)设置位地址类型R6(4为X输 人继电器,5为Y输出继电器,8
以51单片机为核心 的触攮屏系统
要接收数据。单片机接收到数据后进行 处理。首先进行触点数据是否有效的判 断,包括:a)是否是人的误操作,即 是否是由于人的抖动而产生的错误数
割攫供的数据执行l
生产过程
J
‘————-、厂’
据。b)ADS7846传过来的数据是否有 效.由于刚开始传过来的第一个坐标是 用户开始接触触摸屏时产生的。所以电 阻并不准确.从而导致数据也不准确,
MOV R0,#ADR—s-H MOV R4.加
Uj:MOV A.@RO
ANL A.#11110000B
SWAP A
MOV B.A MOV DIyIR.相呵lABCl
MOVC A.@A+DPTR
ADD A.R4
MOV R4.A
MOV A.B
MOV DPTR.棚rABC2
MOVC A.@A+DPrR CLR 1.I
MOV ADR S H。R3 CLR TI;;;发送开始数据 MOV SBUF.#82H
JNB TI.¥ CLR TI: MOV A.GN;发送功能数据 CLR C
SUBB A.#30H
为友利华高科技 YD-1011ARM彩色液晶智能显示器 说明书
YD-1011ARM 彩色液晶智能显示器使用说明书欢迎您购买彩色液晶智能显示器本说明书适用于友利华(河南)高科技开发有限公司制造生产的YD-1011ARM智能系列显示器。
!注意∶为防止火灾或电击危险,勿将本机放置在淋雨或潮湿的地方。
使用本机推荐的开关电源。
避免安装不良。
不要在温度太低或太高的地方存贮或使用,严禁阳光长期直射或紫外线照射液晶屏幕!因为本装置是精密装备,所以请不要自行打开,拆开或改装。
避免强烈振动和跌落地上。
用完或发生故障时,请关掉本机。
每次开关机后重新开机的时间应大于5秒钟。
请不要按压本机屏幕。
不可用汽油、酒精或其它化学药剂擦拭,用湿润软布抹净即可。
本机为液晶显示,如果屏幕破损,液晶遗漏在手上、身上或衣服上时,请用肥皂和清水洗净即可。
内有高压,请勿随意拆卸!如有故障请直接同本公司或代理商联系。
敬告:1、日本液晶生产厂家明文告知:彩色液晶屏是采用高新技术通过精密设备制造出来的产品,允许有0.01%(万分之一)的像素有缺陷或出现亮点。
敬请予以理解。
2、本产品自购买之日起免费保修期为一年。
但因使用不当等人为操作失误或不可抗拒力所造成的损坏和故障不在此保修范围之内。
3、为改善性能,本机与说明书可能会进一步改进和补充,恕不另行通知。
○R为友利华(河南)高科技开发有限公司彩色液晶产品的注册商标目录第一章概述 (3)第一节简介 (3)第二节原理框图 (3)第二章性能与接口 (4)第一节性能指标 (4)第二节外部接口 (5)第三节拨码开关设置 (5)第四节通讯接口连线图 (6)第三章安装与通讯 (6)第一节安装准备 (6)第二节串行通讯 (6)第三节并行通讯 (7)第四章命令格式 (7)第一节命令详解 (7)第二节命令总汇 (15)第五章软件升级 (16)第六章外型尺寸 (17)第七章应用举例 (18)附录 (18)附录一:汉字内码查询 (19)附录二:51汇编举例(串口) (19)附录三:51汇编举例(并口) (20)附录四:选配件触摸屏 (22)附录五:A S C I I码表 (23)第一章概述第一节简介彩色液晶显示器作为当代高新技术的结晶产品,它不仅具有超薄平面、色彩逼真的特点,而且还具有体积小、耗电省、寿命长、无射线、抗震、防爆等CRT所无法比拟的优点。
51单片机与迪文DGUS屏通信合作,下载及模拟调试
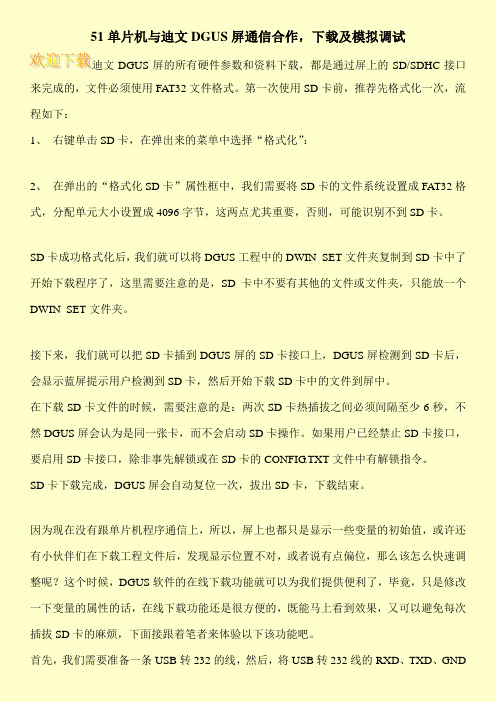
51单片机与迪文DGUS屏通信合作,下载及模拟调试迪文DGUS屏的所有硬件参数和资料下载,都是通过屏上的SD/SDHC接口来完成的,文件必须使用FAT32文件格式。
第一次使用SD卡前,推荐先格式化一次,流程如下:1、右键单击SD卡,在弹出来的菜单中选择“格式化”:2、在弹出的“格式化SD卡”属性框中,我们需要将SD卡的文件系统设置成FAT32格式,分配单元大小设置成4096字节,这两点尤其重要,否则,可能识别不到SD卡。
SD卡成功格式化后,我们就可以将DGUS工程中的DWIN_SET文件夹复制到SD卡中了开始下载程序了,这里需要注意的是,SD卡中不要有其他的文件或文件夹,只能放一个DWIN_SET文件夹。
接下来,我们就可以把SD卡插到DGUS屏的SD卡接口上,DGUS屏检测到SD卡后,会显示蓝屏提示用户检测到SD卡,然后开始下载SD卡中的文件到屏中。
在下载SD卡文件的时候,需要注意的是:两次SD卡热插拔之间必须间隔至少6秒,不然DGUS屏会认为是同一张卡,而不会启动SD卡操作。
如果用户已经禁止SD卡接口,要启用SD卡接口,除非事先解锁或在SD卡的CONFIG.TXT文件中有解锁指令。
SD卡下载完成,DGUS屏会自动复位一次,拔出SD卡,下载结束。
因为现在没有跟单片机程序通信上,所以,屏上也都只是显示一些变量的初始值,或许还有小伙伴们在下载工程文件后,发现显示位置不对,或者说有点偏位,那么该怎么快速调整呢?这个时候,DGUS软件的在线下载功能就可以为我们提供便利了,毕竟,只是修改一下变量的属性的话,在线下载功能还是很方便的,既能马上看到效果,又可以避免每次插拔SD卡的麻烦,下面接跟着笔者来体验以下该功能吧。
首先,我们需要准备一条USB转232的线,然后,将USB转232线的RXD、TXD、GND。
PIC单片机与触摸屏串行通信MODBUS协议

PIC单片机与触摸屏串行通信MODBUS协议技术分类:嵌入式系统微处理器与DSP | 2006-02-12来源:CE china工控中经常需要观察系统的运行状态或者修改运行参数。
触摸屏能够直观、生动地显示运行参数和运行状态,而且通过触摸屏画面可以直接修改系统运行参数,人机交互性好。
单片机广泛应用于工控领域中,与触摸屏配合,可组成良好的人机交互环境。
触摸屏和单片机通信,需要根据触摸屏采用的通信协议为单片机编写相应的通信程序。
Modbus协议是美国Modicon公司推出的一种有效支持控制器之间以及控制器经由网络(例如以太网)和其它设备之间进行通信的协议。
本文以PIC16F877单片机和人机电子有限公司的eView MT510T 型触摸屏为例,介绍其通信程序的开发过程。
1 系统结构实现触摸屏与单片机的通讯,主要是解决通讯协议的问题。
本文使用开放的Modbus 通讯协议,以触摸屏作主站,单片机作从站。
eView触摸屏本身支持Modbus通讯协议,如果单片机也支持Modbus协议,就可以进行通信了。
触摸屏与单片机之间采用的RS-232C兼容接口直接连接,传输速率设置为9600kb/s。
图1为该系统的电路图。
将PIC16F877单片机RC6、RC7口设置为异步串行通信模式,经过MAX232芯片将TTL 电平转换为RS232电平,再与eView触摸屏PLC[RS-232]接口相连,即完成了硬件连接。
eView 触摸屏PLC[RS-232]接口的管脚2为TXD,管脚3为RXD。
2 Modbus通信协议介绍Modbus通信协议是一种串行的主从通信协议,网络里仅有一台设置可作为主机(称Master),其它设备作为从机(称Slaver),主机不需编号,从机必须编号。
协议定义了主机查询及从机应答的信息帧格式。
通信时,主机首先向从机发出请求信息,符合相应地址码的从机接收通讯命令,并除去地址码,读取信息,如果没有出错,则执行相应的任务,然后把执行结果返给主机。
51单片机与迪文DGUS屏通信例程之三: 单片机程序编写
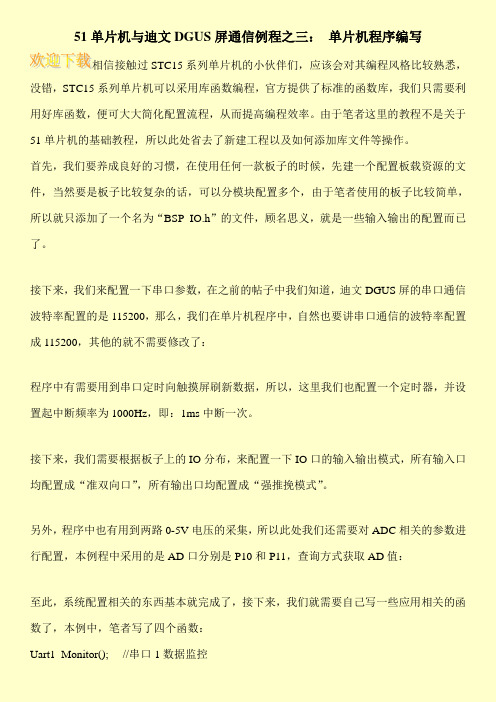
51单片机与迪文DGUS屏通信例程之三:单片机程序编写相信接触过STC15系列单片机的小伙伴们,应该会对其编程风格比较熟悉,没错,STC15系列单片机可以采用库函数编程,官方提供了标准的函数库,我们只需要利用好库函数,便可大大简化配置流程,从而提高编程效率。
由于笔者这里的教程不是关于51单片机的基础教程,所以此处省去了新建工程以及如何添加库文件等操作。
首先,我们要养成良好的习惯,在使用任何一款板子的时候,先建一个配置板载资源的文件,当然要是板子比较复杂的话,可以分模块配置多个,由于笔者使用的板子比较简单,所以就只添加了一个名为“BSP_IO.h”的文件,顾名思义,就是一些输入输出的配置而已了。
接下来,我们来配置一下串口参数,在之前的帖子中我们知道,迪文DGUS屏的串口通信波特率配置的是115200,那么,我们在单片机程序中,自然也要讲串口通信的波特率配置成115200,其他的就不需要修改了:
程序中有需要用到串口定时向触摸屏刷新数据,所以,这里我们也配置一个定时器,并设置起中断频率为1000Hz,即:1ms中断一次。
接下来,我们需要根据板子上的IO分布,来配置一下IO口的输入输出模式,所有输入口均配置成“准双向口”,所有输出口均配置成“强推挽模式”。
另外,程序中也有用到两路0-5V电压的采集,所以此处我们还需要对ADC相关的参数进行配置,本例程中采用的是AD口分别是P10和P11,查询方式获取AD值:
至此,系统配置相关的东西基本就完成了,接下来,我们就需要自己写一些应用相关的函数了,本例中,笔者写了四个函数:
Uart1_Monitor(); //串口1数据监控。
单片机与触摸屏的接口设计与人机交互应用案例研究

单片机与触摸屏的接口设计与人机交互应用案例研究在现代科技不断发展的今天,单片机与触摸屏的结合已经成为一种常见的电子产品设计方式。
单片机作为一种集成电路芯片,在微处理器中具有完整的中央处理器、存储器、I/O接口等硬件系统,而触摸屏则是一种通过人体电容来实现操作的输入设备。
单片机与触摸屏的结合,可以实现更加便捷、灵活和智能的人机交互方式,本文将通过一个实际案例来介绍单片机与触摸屏的接口设计与人机交互应用。
在本案例中,我们以一个智能家居控制系统为例进行介绍。
该系统主要包括单片机控制模块、触摸屏显示模块、以及各种传感器和执行器。
单片机控制模块负责通过接口与触摸屏显示模块进行通信,接收用户输入的指令并控制各种设备的运行状态。
触摸屏显示模块则用于显示系统的状态信息和操作界面,实现人机交互。
在该系统中,单片机与触摸屏的接口设计是非常关键的一环。
首先,我们需要选择合适的通信接口来连接单片机和触摸屏。
常见的接口有SPI接口、I2C接口等,不同的接口具有不同的特点和优缺点,需要根据实际需求进行选择。
在本案例中,我们选择了SPI接口来连接单片机和触摸屏,因为SPI接口具有高速传输、简单连接、抗干扰能力强等优点,非常适合在该系统中使用。
接着,我们需要设计合适的通信协议来实现单片机与触摸屏之间的数据交互。
通信协议可以理解为双方之间的一种约定,规定了数据的传输格式、命令的格式等,确保双方能够正常通信。
在本案例中,我们设计了一种简单的通信协议,包括数据包格式、命令格式、校验和等内容,保证数据传输的可靠性和稳定性。
除了接口设计,人机交互应用也是该系统中的一个重要环节。
触摸屏作为用户的主要操作界面,需要设计直观、友好的交互界面,方便用户进行各种操作。
在本案例中,我们设计了一个简洁明了的控制界面,包括各种开关按钮、滑动条等元素,用户可以通过触摸屏轻松地进行各种设备的控制。
总的来说,单片机与触摸屏的接口设计与人机交互应用在智能家居控制系统中起着至关重要的作用。
教你用单片机驱动大触摸液晶显示屏

随着工业需求的不断提高,普通10.4寸,12.1寸,15寸的人机界面已经不能满足很多客户的需求,现在市面上推出了VGA组态人机界面,可以驱动多种分辨率的触摸屏显示器,22寸,42寸等宽屏都不是问题。
开发过程跟普通人机界面大为相似,唯一不同的是分辨率选择,触摸屏显示器选择等。
下面介绍开发方法:组态软件编程步骤(到广州市微嵌计算机科技有限公司官方网站下载:):组态软件编程步骤:1.新建组态软件工程属性,选择最佳分辨率(比如42寸屏的分辨率是1920*1080,但是选项中没有,那就应该按照比值最近法选,因为1920除以1080等于1.7777,可选分辨率里面的1366除以768等于1.7778,而其他分辨率比值都没有这个接近,就选1366*768为最佳分辨率),选择与PLC,单片机等从设备的通讯协议,支持Modbus RTU和西门子,欧姆龙,台达,三菱,松下等主流PLC2.进入前一步所设置分辨率(1024*768)3.编程好上位机之后就可以点击“调试”菜单里面的下载到设备了至于单片机如何驱动这个触摸液晶屏,步骤如下:很多时候,工业控制或者产品设计方面受到PLC这种功能确定,扩展麻烦,成本昂贵等方面的制约因素,需要独立开发一种特殊功能,但是又需要连接触摸屏通讯,工程师在这个方面往往需要花费很大功夫,现在我要帮大家解决的问题就是单片机与人机界面触摸屏通讯的最简单,最有效的2种方法,其实就是分为2种通讯协议,即工业标准的Modbus RTU协议和工程师自己定义的自由协议。
本实例采用广州市微嵌计算机科技有限公司(公司网站:)的人机界面作为参考,因为公司提供一系列的技术支持和公布单片机源代码,加上公司的人机界面支持自由协议等等先天优势,开发工程方便有效。
方案比较:方案一modbus—rtu协议:优点:工业标准通讯协议,具有通用性,,传输数据量大缺点:需要时间去了解协议的格式和以及按照规定编写通讯程序(我们提供MODBUS-RTU源代码,客户直接移植就可以,不必费心)方案二自由协议:优点:数据格式客户自己定义,灵活多变,定制性强,可以模拟任何已知报文的通讯协议缺点:传输数据量不大,通用性不强,移植不方便工程师可以根据以上两种通讯协议的优缺点来选择理想的方案;现在我们重点介绍广州市微嵌计算机科技有限公司的人机界面的自由通讯协议。
串口屏(触摸屏)组态软件+多台51单片机MODBUSRTU多机串口通信程序源码

串口屏(触摸屏)组态软件+多台51单片机MODBUS RTU多机串口通信程序源码串口屏(触摸屏)组态软件+多台51单片机MODBUS RTU多机串口通信程序源码实现触摸屏(串口屏)与单片机的通讯,主要是解决通讯协议的问题。
本文使用开放的Modbus通讯协议,以广州易显的HMImaker触摸屏作主机(Master),单片机作从机(Slaver)。
HMImaker触摸屏本身支持Modbus通讯协议,只要单片机按照Modbus 协议进行收发数据,就可以进行通信了。
触摸屏与单片机之间采用RS-485标准接口直接连接,与多台51单片机MODBUS RTU多机串口通信一、包括如下实例:二、串口屏(触摸屏)组态软件HMImaker实现功能:01、对4台51单片机4路数字量输入实现读操作,通过MODBUS RTU的02功能码实现; 02、对4台51单片机4路继电器输出实现读操作,通过MODBUS RTU的01功能码实现; 03、对4台51单片机4路模拟量输入实现读操作,通过MODBUS RTU的04功能码实现; 04、对4台51单片机4路模拟量输出实现读操作,通过MODBUS RTU的03功能码实现; 05、对4台51单片机4路继电器输出实现写操作,通过MODBUS RTU的05功能码实现; 06、对4台51单片机4路模拟量输出实现写操作,通过MODBUS RTU的06功能码实现; 07、组态工程以串口屏(触摸屏)组态软件HMImaker为例,如下所示:三、单片机从站支持的MODBUS RTU功能码:01、功能码01:此功能可对单片机4路(甚至更多,可扩展)数字量输出多路进行读操作; 02、功能码02:此功能可对单片机4路(甚至更多,可扩展)数字量输入多路进行读操作; 03、功能码03:此功能可对单片机4路(甚至更多,可扩展)模拟量输出多路进行读操作; 04、功能码04:此功能可对单片机4路(甚至更多,可扩展)模拟量输入多路进行读操作; 05、功能码05:此功能可对单片机4路(甚至更多,可扩展)数字量输出一路进行写操作; 06、功能码06:此功能可对单片机4路(甚至更多,可扩展)模拟量输出一路进行写操作; 07、功能码15:此功能可对单片机4路(甚至更多,可扩展)数字量输出多路进行写操作; 08、功能码16:此功能可对单片机4路(甚至更多,可扩展)模拟量输出多路进行写操作。
普通51单片机驱动3.5寸TFT的应用实例与源代码!

普通51单片机驱动3.5寸TFT的应用实例与源代码!发布: 2010-1-15 16:59 | 作者: pcb_dz | 来源: 网络 | 查看: 675次前市场流行的3.5寸屏基本上都是只内置了驱动器,而不带控制器,这样给用户的使用造成了一些难度。
基本上很多朋友在用彩屏时选择一些带LCD控制器的ARM7或ARM9去开发,对于不会ARM开发的朋友来说,只使用普通MCU,这样可以选择的3.5寸TFT模块,就很难找到了。
本文就是基于市场上一款比较使用的3.5寸TFT模块编写的,用户只需要帮该TFT模块当作普通的单色液晶的开发思路来使用,就可以很容易去编程。
一、硬件选择1、 MCU:AT89S512、开发编译环境:Keil C513、 3.5寸TFT模块型号:MzT35C1二、TFT模块基本性能:1、基本参数模块结构:内置控制器屏幕大小: 3.5英寸屏幕分辩率:320*240屏幕颜色数:65536色(16位真彩色)工作电压: 3.3V/5V可选总线结构: Intel8080总线宽度: 8Bit背光形式:LED;可指令控制,0-127可调连接方式:排针插座触摸屏:标准配置不带触摸屏;模组留有触摸屏芯片焊盘和触摸屏接口2、接口引脚说明3、操作时序(8位并行Intel 8080总线)MzT35C1模块支持intel8080总线,总线的最高速度可达20MHz(当然总线的速度能否达到最高接口速度,还与用户的总线布线、线长等有关),也就是说,如果控制MCU速度足够快的话,是可以支持视频的显示的。
注意:MzT35C1模块的总线接口是8位的,也就意味着对显存的数据操作时,需要连续进行两次操作方可完成,先传高字节再传低字节;但对于寄存器的操作(写入寄存器地址,即A0为低时的写入操作)8位的操作方可。
三、MzT35C1与51硬件接口连接图本例程使用GPIO来模拟总线时序。
上图的模块供电为5V的模块,而模块的端口电平为3.3V的,所以在所有的51端口与模块间的连接串入了一个100欧的电阻,有关MCS51的其它电路不在图中画出,请用户具体参考其它的开发板文档进行了解。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01,
/* Table Of CRC Values for high-order byte */
uchar code auchCRCHi[] = {
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81,
0x7B, 0x7A, 0xBA, 0xBE, 0x7E, 0x7F, 0xBF, 0x7D, 0xBD, 0xBC, 0x7C, 0xB4, 0x74, 0x7ห้องสมุดไป่ตู้, 0xB5,
0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0,
0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01,
/* these macro describe send or recieve allowed */
#define SEND 1 // send allowed
#define RECIEVE 0 // recieve allowed
#define SlaveID 0x01 // the slave's ID
0x04, 0xCC, 0x0C, 0x0D, 0xCD, 0x0F, 0xCF, 0xCE, 0x0E, 0x0A, 0xCA, 0xCB, 0x0B, 0xC9, 0x09,
0x08, 0xC8, 0xD8, 0x18, 0x19, 0xD9, 0x1B, 0xDB, 0xDA, 0x1A, 0x1E, 0xDE, 0xDF, 0x1F, 0xDD,
0x62, 0x66, 0xA6, 0xA7, 0x67, 0xA5, 0x65, 0x64, 0xA4, 0x6C, 0xAC, 0xAD, 0x6D, 0xAF, 0x6F,
0x6E, 0xAE, 0xAA, 0x6A, 0x6B, 0xAB, 0x69, 0xA9, 0xA8, 0x68, 0x78, 0xB8, 0xB9, 0x79, 0xBB,
/* These macro describe recieve message lenght of different function code */
/* But not include data lenght ,the data is master write to slave */
/* because we don't know the data lenght prior, it depend on ComBuf[ComIndexNoPoint] value */
#define uint unsigned int
/* These macro for Mudbus function code */
#define ReadCoilSta 0x01 // 0X read coil function
#define ForceSingleCoil 0x05 // 0X force single coil function
uchar data CommIndexEnd;
uchar idata CommBuf[MaxDataLen];
uchar idata SlaveOutputBuf[MaxRegLen]; // Hight 8 bit of word is front,Low 8 bit is back
uchar idata SlaveInputBuf[MaxRegLen];
0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81,
sbit LED4=P1^4;
sbit LED5=P1^5;
sbit LED6=P1^6;
sbit LED7=P1^7;
uchar idata ForceCoilBuf[10];
uchar count=0;
uchar forceval=0x00;
//bit forcesendF=0;
0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0,
0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01,
#include<reg52.h>
#include<absacc.h>
#include<intrins.h>
#include<ctype.h>
/* These macro define simple data type */
#define uchar unsigned char
#define ulint unsigned long
0x40
} ;
/* Table of CRC values for low-order byte */
uchar code auchCRCLo[] = {
0x00, 0xC0, 0xC1, 0x01, 0xC3, 0x03, 0x02, 0xC2, 0xC6, 0x06, 0x07, 0xC7, 0x05, 0xC5, 0xC4,
#define MaxRegLen 20 // preset SlaveOutputBuf Max lenght
/* variable for modbus is following */
bit data RecFinishF;
uchar data CommIndex;
uchar data writeadr;
0x2E, 0x2F, 0xEF, 0x2D, 0xED, 0xEC, 0x2C, 0xE4, 0x24, 0x25, 0xE5, 0x27, 0xE7, 0xE6, 0x26,
0x22, 0xE2, 0xE3, 0x23, 0xE1, 0x21, 0x20, 0xE0, 0xA0, 0x60, 0x61, 0xA1, 0x63, 0xA3, 0xA2,
0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81,
0x1D, 0x1C, 0xDC, 0x14, 0xD4, 0xD5, 0x15, 0xD7, 0x17, 0x16, 0xD6, 0xD2, 0x12, 0x13, 0xD3,
0x11, 0xD1, 0xD0, 0x10, 0xF0, 0x30, 0x31, 0xF1, 0x33, 0xF3, 0xF2, 0x32, 0x36, 0xF6, 0xF7,
0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81,
#define ReadCoilStaIndexEnd 7 // 0~7,0x01,0X
#define ForceSingleCoilIndexEnd 7 // 0~7,0x05,0X
#define ReadHoldRegIndexEnd 7 // 0~7,0x03,4X
#define PresetMulRegIndexEnd 7 // 0~8,0x10,4X
#define ReadHoldReg 0x03 // 4X read input register
#define PresetMulReg 0x06 // 4X write multi register
/* These macro describe index of communiction message from start to end */
#define CommIndexStartAdrLo 3 // macro for data low adr
#define CommIndexNoPointHi 4 // macro for hight quantity datas
#define CommIndexNoPointLo 5 // macro for low quantity datas
#define SendRecieveDelay 50 // Send turn to Recieve or Recieve turn to Send delay time vlaue