基于触摸屏的步进电机控制系统毕业设计说明书
毕业设计--- 触摸屏 PLC变频器电动机综合控制
姓名专业班级XXXXXX论文名称触摸屏PLC变频器电动机综合控制指导教师摘要世界自动化机械总的趋势是提高自动化、提高生产率、提高柔性灵活性,技术含量和先进程度不断提高。
由于科学技术的发展,使得一些国产PLC具备一些主流PLC的功能:可靠性高,抗干扰能力强;配套齐全,功能完善,适用性强;易学易用,深受工程技术人员欢迎;系统的设计、建造工作量小,维护方便,容易改造;体积小,重量轻,能耗低;使用更加简洁方便。
21世纪,PLC会有更大的发展。
从技术上看,计算机技术的新成果会更多地应用于可编程控制器的设计和制造上,会有运算速度更快、存储容量更大、智能更强的品种出现;从产品规模上看,会进一步向超小型及超大型方向发展;从产品的配套性上看,产品的品种会更丰富、规格更齐全,完美的人机界面、完备的通信设备会更好地适应各种工业控制场合的需求;从市场上看,各国各自生产多品种产品的情况会随着国际竞争的加剧而打破,会出现少数几个品牌垄断国际市场的局面,会出现国际通用的编程语言;从网络的发展情况来看,可编程控制器和其它工业控制计算机组网构成大型的控制系统是可编程控制器技术的发展方向。
目前的计算机集散控制系统DCS(Distributed Control System)中已有大量的可编程控制器应用。
伴随着计算机网络的发展,可编程控制器作为自动化控制网络和国际通用网络的重要组成部分,将使得工业网络在工业及工业以外的众多领域发挥越来越大的作用。
本系统以PLC、变频器、触摸屏为研究对象,通过RS485通讯来实现:(1)两台PLC能够实现数据交换;(2)两台PLC、触摸屏能够控制电动机的运行状态;(3)可以通过人机界面来远距离地实现监视和控制PLC变频器及电动机的运行状态。
本控制系统包括对汇川PLC控制器,汇川变频器,三相交流步进电机,汇川触摸屏的使用。
目录第一章前言 (4)1-1 工业控制网络的发展 (4)1-2.工业以太网技术的特点 (5)第二章PLC和变频器通信项目设计 (8)2-1系统结构图 (8)2-1-1 汇川PLC硬件特点 (8)2-2项目要求实现的功能 (9)2-3 I/O分配 (9)2-4 通讯成功具备的关键点 (10)2-4-1 硬件上 (10)2-4-2 软件上 (11)2-4-3 变频器的使用和设置 (12)2-4-3-1 功能指示灯说明 (14)2-4-3-2 变频器参数设置 (14)2-5 编程流程图 (14)2-6 源程序及图片 (17)2-6-1 从站 (17)2-6-2 主站 (18)第三章毕业设计、实习感想 (25)3-1 实习感想 (25)3-2 毕业设计感想 (25)第四章参考文献 (26)第一章前言1-1 工业控制网络的发展工业控制网络的发展是伴随着控制系统的变革而发展起来的。
步进电机控制系统毕业设计报告

无锡职业技术学院毕业设计说明书(论文)*******************毕业设计论文论文题目:基于单片机的步进电机控制电路板设计系部自动控制系专业电气自动化班级自动化20651班学生姓名王小梅学号 2010065125指导教师孙晓燕******************************无锡职业技术学院毕业设计说明书(论文)摘要随着微电子和计算机技术的发展,步进电机的需求量与日俱增,它广泛用于打印机、电动玩具等消费类产品以及数控机床、工业机器人、医疗器械等机电产品中,其在各个国民经济领域都有应用。
研究步进电机的控制系统,对提高控制精度和响应速度、节约能源等都具有重要意义。
步进电机是一种能将电脉冲信号转换成角位移或线位移的机电元件,步进电机控制系统主要由步进控制器,功率放大器及步进电机等组成。
采用单片机控制,用软件代替上述步进控制器,使得线路简单,成本低,可靠性大大增加。
软件编程可灵活产生不同类型步进电机励磁序列来控制各种步进电机的运行方式。
本设计是采用AT89C51单片机对步进电机的控制,通过IO口输出的时序方波作为步进电机的控制信号,信号经过芯片ULN2003驱动步进电机;同时,用 4个按键来对电机的状态进行控制,并用数码管动态显示电机的转速。
系统由硬件设计和软件设计两部分组成。
其中,硬件设计包括AT89C51单片机的最小系统、电源模块、键盘控制模块、步进电机驱动(集成达林顿ULN2003)模块、数码显示(SM420361K数码管)模块、测速模块(含霍尔片UGN3020)6个功能模块的设计,以及各模块在电路板上的有机结合而实现。
软件设计包括键盘控制、步进电机脉冲、数码管动态显示以及转速信号采集模块的控制程序,最终实现对步进电机转动方向及转动速度的控制,并将步进电机的转动速度动态显示在LED数码管上,对速度进行实时监控显示。
软件采用在Keil软件环境下编辑的C语言。
本系统具有智能性、实用性及可靠性的特点。
基于S7-1200PLC的步进电机控制系统
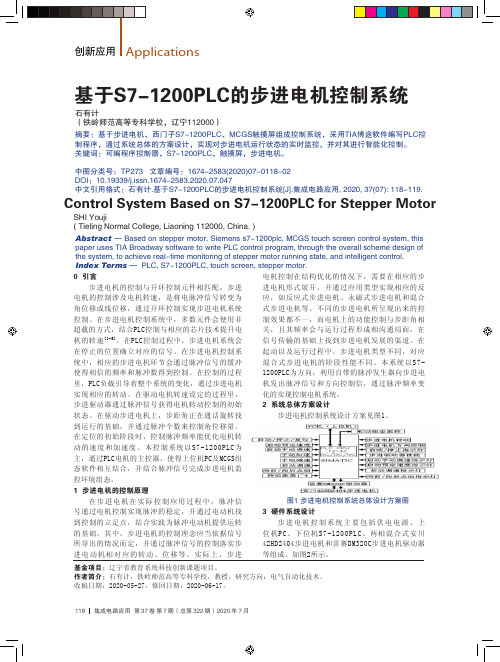
图1 步进电机控制系统总体设计方案图
3 硬件系统设计
步进电机控制系统主要包括供电电源、上
位机PC、下位机S7-1200PLC、两相混合式安川
42HD2404步进电机和雷赛DM320C步进电机驱动器
等组成。
如图2所示。
石有计,铁岭师范高等专科学校,教授,研究方向:电气自动化技术。
在编写PLC程序时,I/O接口会根据接线情况自动分配信号,对应的信号得以分配后。
信号控制会以输入输出口为主,将I/O接口作为主导。
输入变量如下:步进电机起动I0.0、步进电机停止I0.1、步进电机复位I0.2、步进电机向后点动I0.3、启动调速I0.4、启动预订速度I0.5、启动手动调速I0.6、手动加速I0.7、手动减速I1.0、转动距离1(3200)I1.1、转动距离2(32000)I1.3、转动距离3(64000)I1.3、转动距离4(96000)I1.4、步进电机向前点动I1.5。
输出变量如下:步进电机转动Q0.0、步进电机方向控制Q0.1、步进电机启动指示
4.2 PLC程序设计
本文采用S7-1200PLC作为主控器,结合硬件设计情况,对步进电机控制系统进行设计,并通过系6 结语
本文采用西门子S7-1200PLC,使用博途V15编程软件,进行步进电机控制系统设备组态及编程,有效实现步进电机控制要求。
实验结果表明,该系统动态特性好、精度高,达到了步进电机运行状态可视化和控制智能化的目的。
该系统具备控制过程的参考价值,对于高效率、小步距、低振动和低噪
图2 硬件接线设计图
表1 细分数和电流选择
图3 触摸屏运行界面。
基于STM32的步进电机控制系统-自动化本科毕业设计

基于STM32的步进电机控制系统-自动化本科毕业设计本文简要介绍了自动化本科毕业设计的主题和目的,并概述了STM32步进电机控制系统的重要性和应用领域。
步进电机控制系统是现代自动化技术中的重要组成部分,广泛应用于各个领域,如机械加工、电子设备、机器人控制等。
该系统能够实现精确控制和位置定位。
然而,传统的步进电机控制系统存在一些限制,如运行效率低、系统稳定性差等。
因此,基于STM32的步进电机控制系统应运而生。
本科毕业设计的主题是基于STM32的步进电机控制系统的设计与实现。
通过使用STM32单片机,设计一个高效稳定的步进电机控制系统,能够实现精确的位置控制和运动控制。
该系统具有较高的运行效率和稳定性,能够应用于各种自动化领域,提高生产效率和产品质量。
关键词:步进电机控制系统,STM32,自动化,本科毕业设计步进电机是一种常见的电动机类型,具有特定的原理和工作方式。
它在自动化领域有广泛的应用。
本文将讨论步进电机的原理和工作方式,并介绍选择基于STM32的步进电机控制系统作为本科毕业设计主题的原因。
步进电机是一种将电脉冲信号转换为离散步进运动的电动机。
它通过电磁铁的启动顺序和定向,使得转子以角度的方式进行运动。
步进电机的原理基于电磁铁的电磁效应和磁性材料的性质来实现。
步进电机在自动化领域有许多应用。
例如,步进电机常被用于精密定位系统、数控机床、印刷机、纺织机械等领域。
它们的精确度、可靠性和可编程性使它们成为许多自动化系统中的理想选择。
选择基于STM32的步进电机控制系统作为本科毕业设计的主题有以下原因:STM32是一种广泛应用的单片机系列,具有强大的计算和控制能力。
STM32具有丰富的外设资源,能够满足步进电机控制系统的需求。
STM32提供了方便的开发环境和丰富的开发工具,使得设计和开发步进电机控制系统更加简便和高效。
基于STM32的步进电机控制系统可以在实践中验证和应用步进电机控制的原理和技术,对于学生来说具有一定的教育意义。
触摸屏与PLC组成的步进电机控制系统

编程控制器(,"- ) 、步进电机驱动器、步进电机和旋转 光电编码器。
收稿日期:#!!)*!+*!) 作者简介:张永飞(()*+,) ,男,讲师,内蒙宁进步奖一项。
$%"
主画面设计
运 行 工 具 软 件 $89:;<=> /$?@A, 执 行 新 建 , 出 现
第 "/ 卷第 $ 期 #!!) 年 5 月
机电产品开发与创新
.8J8>KL:8<M N @<<KJ=M;K< KO :=EP;<89Q N 8>8EM9;E=> L9KRSEMD
,-.%"/01-%$ ・ 测试与控制 ・ 234%0#!!)
触摸屏与 &’( 组成的步进电机控制系统
张永飞 !,于
(*G天津职业大学 机电工程与自动化学院,天津
, > &’, , : (’’ , : ;’’’ , : &’’ , $%&2 ,: ’ ,> F ,> ’
/1(
.1(
&
/(’ 0&(
, $% &’’ , $% &’& , $% &’( , $% &’, , $% &’5 , $% &’1 , $% F’;( , $% F’;( ,
(5
& :&
,
?0@ 程 拥 强 B 郭 凤 龙 B 朱 劲 A 单 片 机 对 9! 存 储 卡 文 件 读 写 的 实 现 ?C@A 计
算机应用 B0))*B5A 等 AD6O &9 与 &% . 0 程序设计参考大全 ?6@A 北京 M ?*@ 程渝荣 B 温以德, 清华大学出版社 B"550B*A
步进电机的控制课程设计说明书

课程设计说明书课题名称:步进电机的控制学院:机械工程学院专业:车辆工程(1班)组员:指导老师:赵骆伟日期: 2010年7月9日目录1.课程设计任务书 (1)2.说明书正文 (2)2.1 前言 (2)2.2 现状 (3)2.3 任务分析与方案设计 (3)2.4 系统设计与开发 (4)2.5 元器件清单及参数选择 (6)2.6 软硬件调试 (6)3. 心得体会 (6)4. 参考文献 (7)5. 附录 (7)1.课程设计任务书1.1任务要求在Dais实验台基础上设计并调试一个外接口电路,能够实现步进电机转速与正反转控制,编程并调试完成整个开发系统,分别由4位同学合作完成。
1.2主要技术要求(1)采用编程的方法实现四相八拍环形分配运行方式,改变激励脉冲频率的大小来实现调制。
(2)正反转控制采用变换步进电机的其中两相相序来实现。
1.3主要完成任务(1)查找相关资料,确定课程设计方案;(2)微机接口电路硬件的焊接、装配、逐步排除故障及调试;(3)用Protel2004绘制微机最小系统配置原理图;(4)用Protel2004绘制相关项目的接口原理图;(5) 编写有关项目的程序,并进行调试;(6) 按照相关项目内容要求,上机进行联调;(7)编写课程设计报告。
1.4成果提交(1)课程设计说明书一本。
(电子文档和打印稿各一份)要求:内容完整,图表完备,条理清晰,分析有据,计算精确。
所附电路图布局合理,清晰完备,图形和符号要规范。
(2)所用元器件清单。
(3)电路实体一套。
要求:该电路实体必须是经过自己安装调试通过并达到性能指标要求的电路实体。
1.5时间安排6月28日~ 7月9日地点:机械工程学院微机原理实验室(教2-北428,424)和学院机房(328)。
6月28日上午,分组及分配课程设计任务。
下午,查找相关资料,初拟总体方案。
6月29日讨论确定总方案,上机熟悉Protel2004软件。
6月30日~ 7月2日完成微机最小系统配置原理图、相关项目接口电路原理图及各项目接口;借领工具,分发参考资料、PCB板及相关元器件。
基于触摸屏的步进电机控制系统毕业设计说明书
□ 优 □ 良 □ 中 □ 及格 □ 不及格
二、论文(设计)水平
1、论文(设计)的理论意义或对解决实际问题的指导意义
□ 优 □ 良 □ 中 □ 及格 □ 不及格
2、论文的观念是否有新意?设计是否有创意?
□ 优 □ 良 □ 中 □ 及格 □ 不及格
2、是否完成指定的论文(设计)任务(包括装订及附件)?
□ 优 □ 良 □ 中 □ 及格 □ 不及格
三、论文(设计)水平
1、论文(设计)的理论意义或对解决实际问题的指导意义
□ 优 □ 良 □ 中 □ 及格 □ 不及格
2、论文的观念是否有新意?设计是否有创意?
□ 优 □ 良 □ 中 □ 及格 □ 不及格
作者签名:日期: 年 月 日
学位论文版权使用授权书
本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
作 者 签 名:日 期:
指导教师签名:日 期:
使用授权说明
本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
3、论文(设计说明书)所体现的整体水平
□ 优 □ 良 □ 中 □ 及格 □ 不及格
建议成绩:□优□良□中□及格□不及格
基于c51单片机设计的 HMI人机界面步进电机调速系统 (分模块写的)2

if(D[Index]> 9999) D[Index] = 0; } }//if else C_Dec = 0;
/****************************************************************************** ****/
unsigned char xdata X[] = {0,28,94,28,94,28,94,28,94}; //寄存器 X 坐标 unsigned char xdata Y[] = {0,24,24,60,60,96,96,132,132}; //寄存器 Y 坐标 /*********************************************************** purpose: 系统初始化 /**********************************************************/ void system_Ini() {
{
handle_ASCII(Index);
switch(index)
{
case 1:
Focus_Flash(X[1],Y[1]);
break;
case 2: Focus_Flash(X[2],Y[2]); break;
case 3: Focus_Flash(X[3],Y[3]); break;
case 4: Focus_Flash(X[4],Y[4]); break;
*
*
* * 功 能 :1. 可 以 设 定 转 速 和 圈 数
毕业设计(论文)-基于PLC的步进电机的控制和机械手

目录摘要 (1)一、课程设计概述 (3)1.1 可编程程序控制器(PLC)概述 (3)1.2 SIEMENS S7-200简介 (3)1.3 STEP7-MICRO/WIN 编程软件简介 (3)二、基于PLC 的机械手控制 (4)2.1 设计要求 (4)2.2 机械手控制流程图 (5)2.3机械手各按键作用 (5)2.4基于PLC 的机械手控制程序梯形图 (6)2.5 问题及解决办法 (8)三、基于PLC的刀库捷径方向选择控制 (9)3.1 设计要求 (9)3.2 刀库捷径方向选择控制按钮作用 (9)3.3 刀库捷径方向选择流程图 (10)3.4 刀库捷径方向选择控制梯形图 (11)3.5 问题及解决办法 (14)四、基于EM235 的步进电机调速系统 (14)4.1 设计要求 (14)4.2 基于EM235 的步进电机调速系统按钮作用 (14)4.3 基于EM235步进电机的调速流程图 (15)4.4 基于EM235步进电机的调速程序梯形图 (16)4.5 问题及解决办法 (19)五、课程设计总结 (20)六、参考文献 (21)摘要PLC 是一种专门为在工业环境下应用而设计的数字运算操作的电子装置。
它具有高可靠性、抗干扰能力强、功能强大、灵活,易学易用、体积小,重量轻,价格便宜的特点。
它采用可以编制程序的存储器,用来在其内部存储执行逻辑运算、顺序运算、计时、计数和算术运算等操作的指令,并能通过数字式或模拟式的输入和输出,控制各种类型的机械或生产过程。
而有关的外围设备,都应按易与工业系统连成一个整体,易于扩充其功能的原则设计。
PLC的应用领域,目前,PLC在国内外已广泛应用于钢铁、石油、化工、电力、建材、机械制造、汽车、轻纺、交通运输、环保及文化娱乐等各个行业。
关键词可编程控制器PLC 控制应用AbstractPLC is a specialized in industrial environment and design of the application of the electronic device digital computing operations. It has high reliability and anti-interference ability strong, powerful, flexible, learn, and use, small volume, light weight, price cheap characteristics. build programs used in its internal memory, storage to perform the logic operation, order processing, timing, counting and arithmetic operation instructions, and digital or analog through the input and output, the control various types of machinery or the production process. And the peripheral devices, should according to easy and industrial system into a whole, easy to extend its function of the design principles.PLC application field, at present, PLC has been widely used in the domestic and foreign steel, petroleum, chemical industry, electric power, building materials, machinery manufacturing, automotive, light textile, transportation, environmental protection, and cultural entertainment industries.Keywords plc control application一、课程设计概述1.1 可编程程序控制器(PLC)概述PLC(可编程序控制器)是一种数字运算操作的电子装置,专为工业环境设计。
步进电机控制系统设计 (毕业设计论文)

附一:封面**********学院毕业设计(论文)题目:步进电机控制系统设计专业:班级:姓名:学号:指导教师:2055 年 5 月 5 日附二:成绩评议表*************学院毕业设计(论文)成绩评议专业班级姓名学号题目步进电机控制系统设计指导教师评阅成绩评定:指导教师:年月日评阅教师意见评阅教师:年月日答辩小组意见答辩小组负责人:年月日中文摘要1、步进电机概述列出了步进电机的特点、技术参数和分类,并阐述了详细调速原理。
2、方案的论证确定了步进电机的控制方法、驱动方式、驱动电路以及基本方案。
3、硬件电路的设计对单片机、步进电机、驱动电路、显示电路与键盘、反馈电路进行了选择,并设计了电源电路、抗干扰及看门狗电路。
4、软件的设计对显示子程序、键盘子程序、驱动程序流程进行了设计,并绘制了正反转程序流程图。
5、总结关键词:步进电机 单片机 调速系统目录前言-----------------------------------------------05第一章步进电机概述---------------------------------061.1 步进电机的特点-----------------------------061.2 步进电机的技术参数-------------------------071.2.1步进电机的基本参数---------------------071.2.2步进电机动态指标及术语-----------------081.3步进电机的分类------------------------------101.4步进电机详细调速原理------------------------12第二章方案的论证-----------------------------------142.1控制方式的确定------------------------------142.2驱动方式的确定------------------------------162.3驱动电路的选择------------------------------172.4基本方案的确定------------------------------18第三章硬件电路的设计-------------------------------203.1单片机的选择--------------------------------203.1.1单片机的选择---------------------------203.1.2主要特性-------------------------------223.2步进电机的选择------------------------------233.2.1三相单三拍通电方式---------------------243.2.2三相双三拍通电方式---------------------253.3驱动电路的选择------------------------------293.4显示电路与键盘的选择------------------------313.5反馈电路的选择------------------------------34第四章软件的设计-----------------------------------374.1显示子程序的设计----------------------------374.2键盘子程序的设计----------------------------374.3驱动程序流程的设计--------------------------384.4正反转程序流程图----------------------------394.4.1正反转程序流程图----------------------394.4.2转速快慢程序流程图--------------------404.4.3定时中断流程图------------------------41五总结-------------------------------------------42前言第一章步进电机概述1.1步进电机的特点:1)一般步进电机的精度为步进角的3-5%,且不累积。
电气控制系统安装与调试 模块三 基于PLC和触摸屏的步进电机控制设计

1.根据电路图连接线路 2.编写PLC程序 3.下载并调试程序,按下正转启动按钮,观察步进电机是否按照要求驱动滑 块前进固定距离后停止;按下反转启动按钮,观察步进电机是否按照要求驱动 滑块前进固定距离后停止。在运行中,按下停止按钮,观察步进电机是否能够 立即停止运行。
16
//项模目块3一.3
步进电机、步进驱动器、三菱PLC、接近开关、MCGS触摸屏、 电脑
23
/ 项目3.4
三、项目分析
1.旋转编码器概述
图3-17 增量式编码器结构示意图
24
/ 项目3.4
三、项目分析
1.旋转编码器概述
图3-18 旋转编码器原理示意图
图3-19 增量式编码器输出的三组方波脉冲
Hale Waihona Puke 25/ 项目3.4三、项目分析
999,999~+999,999。
⑵ 源操作数 ,目标操作数 和 。
指定输出脉冲频率,对于16位指令,操作数的范围为10~32,767(Hz),对于32
位指令,范围为10~100(KHz)。
指定脉冲输出地址,指令仅能用于Y000、Y001。
指定旋转方向信号输出地址。当输出的脉冲数的为正时,此输出为ON,而当输
步进电机、步进驱动器、三菱PLC、电脑
02
/ 项目3.1
三、项目分析
1、步进电动机简介
步进电机是将电脉冲信号转变为角位 移或线位移的开环控制元件。在非超载的 情况下,电机的转速、停止的位置只取决 于脉冲信号的频率和脉冲数,而不受负载 变化的影响,当步进驱动器接收到一个脉 冲信号,它就驱动步进电机按设定的方向 转动一个固定的角度,称为“步距角”,它 的旋转是以固定的角度一步步运行的。可 以通过控制脉冲个数来控制角位移量,从 而达到准确定位的目的;同时可以通过控 制脉冲频率来控制电机转动的速度和加速 度,从而达到调速的目的。
步进电机开环控制系统设计-毕业设计说明书
xxx 理工大学毕业设计2013 年06月14 日步进电机开环控制系统设计摘要详细讨论步进电机的工作原理及其特性,论述了步进电机控制系统的设计方案及其控制原理,简单易学,可靠性高。
步进电机是一种常用的机电执行元件,可靠性高,成本低,实用性强,具有较高的通用性和应用推广价值。
步进电动机突出的优点是它可以在宽广的频率范围内通过改变脉冲频率来实现调速,快速起停、正反转控制等,并且用其组成的开环系统既简单、廉价,又非常可靠,因此在众多领域有着极其广泛的应用。
开环系统的优点是系统简单、成本低。
步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。
使得在速度、位置等控制领域用步进电机来控制变的非常的简单。
步进电机的调速一般是改变输入步进电机的脉冲的频率来实现步进电机的调速,因为步进电机每给一个脉冲就转动一个固定的角度,这样就可以通过控制步进电机的一个脉冲到下一个脉冲的时间间隔来改变脉冲的频率,延时的长短来具体控制步进角来改变电机的转速,从而实现步进电机的调速。
关键词步进电机;开环控制;调速目录摘要 (I)第1章绪论 (1)1.1 课题背景 (1)1.2 步进电机工作原理 (3)1.3 系统设计的目标 (3)第2章步进电机的分类、基本结构 (5)2.1步进电机的分类 (5)2.2 步进电机的基本结构 (5)2.2.1电机固有步距角 (5)2.2.2步进电机的相数 (5)2.2.3保持转矩(HOLDING TORQUE) (6)2.2.4钳制转矩(DETENT TORQUE) (6)2.3 步进电机主要特点 (6)2.4 步进电机在工业控制领域的主要应用情况介绍 (7)2.5本章小结 (7)第3章步进电机开环系统硬件电路的设计 (8)3.1 单片机的选择 (8)3.2 步进电机的选择 (9)3.3 驱动电路的选择 (10)3.4 反馈电路的选择 (12)3.5 电源电路设计 (13)3.6 抗干扰设计 (13)3.7 看门狗电路 (14)3.8 本章小结 (14)结论 (15)致谢 (16)参考文献 (17)第1章绪论1.1课题背景步进电动机已成为除直流电动机和交流电动机以外的第三类电动机,传统电动机作为机电能量转换装置,在人类的生产和生活进入电气化过程中起着关键的作用。
步进电机控制系统设计毕业设计

附表:附表 A学生用表1.唐山学院毕业设计(论文)开题报告2.毕业设计 ( 论文 ) 中期检查表(学生用)3.唐山学院优秀毕业设计 ( 论文 ) 审批表附表 B指导教师用表1.首次指导毕业设计 ( 论文 ) 教师审批表2.唐山学院毕业设计(论文)题目申报表3.唐山学院毕业设计(论文)任务书4.毕业设计 ( 论文 ) 指导记录(教师用)5.唐山学院优秀毕业设计(论文)指导教师审批表附表 C系、教研室用表1.唐山学院毕业设计(论文)题目汇总表2.毕业设计(论文)选题工作总结3.毕业设计 ( 论文 ) 答辩委员会及答辩小组组成名单4.唐山学院毕业设计(论文)成绩汇总表5.唐山学院毕业设计 ( 论文 ) 工作总结附表 D评阅用表1.毕业设计 ( 论文 ) 指导教师评议书 (1)2.毕业设计 ( 论文 ) 评阅教师评议书 (2)3.毕业设计 ( 论文 ) 答辩小组评议书 (3)4.答辩委员会意见5.毕业设计 ( 论文 ) 评议书 (4) ( 二次答辩专用 )附件E其它1.唐山学院毕业设计(论文)撰写规范2.唐山学院毕业设计(论文)规范样本附表 A1唐山学院毕业设计(论文)开题报告设计(论文)题目:步进电机控制系统设计系别: __________机电工程系 _______________专测控技术与仪器业: _________________________刘耀程姓名: _________________________张帆指导教师: _________________________辅导教师: _________________________年月日题目类型(打√选择)设计()论文()一、文献综述1步进电机的基本原理与优缺点:步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
基于LPC1114的电阻式触摸屏与步进电机控制系统开发
基于LPC1114的电阻式触摸屏与步进电机控制系统开发陈俊彦;张红梅【摘要】针对目前电阻式触摸屏控制电路设计结构复杂、干扰严重、加重主控制器负担等缺陷,提出利用恩智浦公司LPC1114低功耗、高性能微处理器和双MOS 管方式进行电阻式触摸屏控制的设计方案,开发了一套使用触摸屏控制步进电机的硬件系统.实验证明,该系统有效地提高了触摸的准确性,并能实时控制4个步进电机的转动,减轻主控制器负担,提高主控制器的工作效率.%Aiming at the design complexity of resistive touch screen control circuit, interference and the burden on the master controller, the strategy of controlling resistive touch screen based on NXP LPC1114 low-power microcontroller and dual MOS is developped. The experimental result shows that this strategy can effectively improve the accuracy of touch and control four stepper motors, the burden of the master controller is reduced and the efficiency of the master controller is improved.【期刊名称】《桂林电子科技大学学报》【年(卷),期】2012(032)004【总页数】4页(P281-284)【关键词】电阻式触摸屏;LPC1114;双MOS管;步进电机【作者】陈俊彦;张红梅【作者单位】桂林电子科技大学信息与通信学院,广西桂林541004;桂林电子科技大学信息与通信学院,广西桂林541004【正文语种】中文【中图分类】TP368.1在电子技术迅速发展的今天,嵌入式设备已经走进了千家万户。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
指导教师签名:日 期:
使用授权说明
本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
□ 优 □ 良 □ 中 □ 及格 □ 不及格
4、研究方法的科学性;技术线路的可行性;设计方案的合理性
□ 优 □ 良 □ 中 □ 及格 □ 不及格
5、完成毕业论文(设计)期间的出勤情况
□ 优 □ 良 □ 中 □ 及格 □ 不及格
作者签名:日期: 年 月 日
学位论文版权使用授权书
本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
2)工程设计类题目的图纸,要求部分用尺规绘制,部分用计算机绘制,所有图纸应符合国家技术标准规范。图表整洁,布局合理,文字注释必须使用工程字书写,不准用徒手画
3)毕业论文须用A4单面打印,论文50页以上的双面打印
4)图表应绘制于无格子的页面上
5)软件工程类课题应有程序清单,并提供电子文档
5.装订顺序
1)设计(论文)
毕业论文声明
本人郑重声明:
1.此毕业论文是本人在指导教师指导下独立进行研究取得的成果。除了特别加以标注地方外,本文不包含他人或其它机构已经发表或撰写过的研究成果。对本文研究做出重要贡献的个人与集体均已在文中作了明确标明。本人完全意识到本声明的法律结果由本人承担。
2.本人完全了解学校、学院有关保留、使用学位论文的规定,同意学校与学院保留并向国家有关部门或机构送交此论文的复印件和电子版,允许此文被查阅和借阅。本人授权大学学院可以将此文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本文。
按照学校要求提交学位论文的印刷本和电子版本;学校有权保存学位论文的印刷本和电子版,并采用影印、缩印、扫描、数字化或其它手段保存或汇编本学位论文;学校有权提供目录检索以及提供本学位论文全文或者部分的阅览服务;学校有权按有关规定向国家有关部门或者机构送交论文的复印件和电子版,允许论文被查阅和借阅。本人授权大学可以将本学位论文的全部或部分内容编入学校有关数据库和收录到《中国学位论文全文数据库》进行信息服务。在不以赢利为目的的前提下,学校可以适当复制论文的部分或全部内容用于学术活动。
学位论文作者(签名):
年月
关于毕业论文使用授权的声明
本人在指导老师的指导下所完成的论文及相关的资料(包括图纸、实验记录、原始数据、实物照片、图片、录音带、设计手稿等),知识产权归属华北电力大学。本人完全了解大学有关保存,使用毕业论文的规定。同意学校保存或向国家有关部门或机构送交论文的纸质版或电子版,允许论文被查阅或借阅。本人授权大学可以将本毕业论文的全部或部分内容编入有关数据库进行检索,可以采用任何复制手段保存或编汇本毕业论文。如果发表相关成果,一定征得指导教师同意,且第一署名单位为大学。本人毕业后使用毕业论文或与该论文直接相关的学术论文或成果时,第一署名单位仍然为大学。本人完全了解大学关于收集、保存、使用学位论文的规定,同意如下各项内容:
论文作者签名: 日期:
指导教师签名: 日期:
数字电子技术课程设计说明书
设计题目:基于触摸屏的步进电机控制系统
毕业设计(论文)原创性声明和使用授权说明
原创性声明
本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。
涉密论文按学校规定处理。
作者签名:日期: 年 月 日
导师签名: 日期: 年 月 日
注意事项
1.设计(论文)的内容包括:
1)封面(按教务处制定的标准封面格式制作)
2)原创性声明
3)中文摘要(300字左右)、关键词
4)外文摘要、关键词
5)目次页(附件不统一编入)
6)论文主体部分:引言(或绪论)、正文、结论
作者签名:日 期:
学位论文原创性声明
本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。本人完全意识到本声明的法律后果由本人承担。
7)参考文献
8)致谢
9)附录(对论文支持必要时)
2.论文字数要求:理工类设计(论文)正文字数不少于1万字(不包括图纸、程序清单等),文科类论文正文字数不少于1.2万字。
3.附件包括:任务书、开题报告、外文译文、译文原文(复印件)。
4.文字、图表要求:
1)文字通顺,语言流畅,书写字迹工整,打印字体及大小符合要求,无错别字,不准请他人代写
2)附件:按照任务书、开题报告、外文译文、译文原文(复印件)次序装订
指导教师评Leabharlann 书指导教师评价:一、撰写(设计)过程
1、学生在论文(设计)过程中的治学态度、工作精神
□ 优 □ 良 □ 中 □ 及格 □ 不及格
2、学生掌握专业知识、技能的扎实程度
□ 优 □ 良 □ 中 □ 及格 □ 不及格
3、学生综合运用所学知识和专业技能分析和解决问题的能力
3.若在大学学院毕业论文审查小组复审中,发现本文有抄袭,一切后果均由本人承担,与毕业论文指导老师无关。
4.本人所呈交的毕业论文,是在指导老师的指导下独立进行研究所取得的成果。论文中凡引用他人已经发布或未发表的成果、数据、观点等,均已明确注明出处。论文中已经注明引用的内容外,不包含任何其他个人或集体已经发表或撰写过的研究成果。对本文的研究成果做出重要贡献的个人和集体,均已在论文中已明确的方式标明。