schneider(施耐德)基本编程指令介绍
施耐德基本指令介绍

概
每实概 每 釐x踪mpl釐实获添置度
操
能Y索特~概 每果唯概 0每始…始概 高每器|概 特箱照象能Y索特 能Y索特~种集针长t果~唯置特照始Y特种种类菜始理置特特箱果模度0器检 特箱照象能Y索特 果 种集针长t~果模0检~ 每检
方
能Y索特~概 每果唯概 0每始…始概 高每器|概 特箱照象能Y索特 能Y索特~种集针长t果~唯置特照始Y特种种类菜始理置特特箱果模度0器检 特箱照象能Y索特 果 种集针长t~果模0检~ 每检
每
釐x踪mpl釐果~添置置添Y度~果模{度始必始息始度始必始息始度始必始息}检
概
每被 言 釐x踪mpl釐被0实0言
描
果~~~能Y索特~而能置节C能度果 而能置节C能 获添置度~果~的箱能~检 获添置必~果~的箱能~检 特箱照象而能置节C能 特箱照象能Y索特
釐x踪mpl釐果~而能置节C能度~果模{度0始度度}检
检 每 每 每 索类节
度度
索类节 果 每果概
环节箱C能的类箱~概
每
检 每 果 每而能
度必
索类节 果 环节箱C能的类箱象B种类CK概 每|特X能特箱照而概 每|的空索种特空特箱能而概 每
检 每 每 每 索类节 概 每实概 每 属 索类节 检
索类节
度息
环节箱C能的类箱象B种类CK概 每 果 环节箱C能的类箱象B种类CK~环B度~~~~~~~环节箱C能的类箱象B种类CK~环B必~特X能特箱照而~环B度 获添置象的箱索节能~~~~~~~~~~~~~~~~~~~获添置象的箱索节能 的箱度~果~的箱能检~~~~~~~~~~~~~~~~~~~~~~的箱必~果~的箱能检 特箱照象获添置~~~~~~~~~~~~~~~~~~~~~特箱照象获添置
施耐德readvar指令详解
施耐德readvar指令详解摘要:一、引言二、Readvar指令概述1.指令功能2.指令格式3.指令应用场景三、Readvar指令详细解析1.指令参数a.参数详解b.参数示例2.指令操作步骤a.操作流程b.操作注意事项四、Readvar指令实战应用1.典型案例分析a.案例背景b.案例实施c.案例总结2.实战技巧分享a.技巧一b.技巧二c.技巧三五、Readvar指令的优缺点1.优点a.高效性b.稳定性c.兼容性2.缺点a.局限性b.安全隐患六、总结与展望正文:一、引言随着工业自动化技术的不断发展,施耐德电气设备在我国的应用日益广泛。
Readvar指令作为施耐德PLC编程中一种重要的读取变量指令,受到了众多工程师的关注。
本文将详细解析Readvar指令的功能、应用场景以及实战应用,旨在为工程师们提供一份实用的参考资料。
二、Readvar指令概述1.指令功能Readvar指令主要用于读取施耐德PLC中定义的变量值。
通过该指令,用户可以方便地获取程序运行过程中所需的数据,以实现对设备状态的监控和控制。
2.指令格式Readvar指令的格式如下:READVAR [变量地址]其中,变量地址表示要读取的变量在PLC中的存储位置。
3.指令应用场景Readvar指令适用于以下场景:a.需要实时监测的设备状态变量b.需要根据实时数据进行控制的程序段c.需要与其他设备(如上位机、触摸屏)共享数据的场合三、Readvar指令详细解析1.指令参数a.参数详解- 变量地址:表示要读取的变量在PLC中的存储位置,通常采用间接寻址方式表示,如:W[100]。
b.参数示例- 示例:READVAR W[100]读取PLC中地址为100的内存单元的值。
2.指令操作步骤a.操作流程- 编写程序:在PLC编程软件中,编写包含Readvar指令的程序。
- 下载程序:将编写好的程序下载到PLC中。
- 运行程序:启动PLC程序,观察读取到的变量值。
施耐德PLC标准指令库课件

该系列PLC支持多种编程语言,如Structured Text、 Instruction List、Function Block Diagram等,方便
用户进行程序编写和调试。
其他系列plc硬件
其他系列PLC是施耐德公司针对特定应用领域推出的产 品,如分布式控制系统、机器人控制系统等。
定期备份PLC程序和数据,以防止意 外情况导致数据丢失。
清洁保养
定期对PLC进行清洁保养,保持其良 好的工作环境和散热效果。
软件更新
定期检查PLC软件的更新情况,并进 行升级以获得更好的性能和功能。
plc故障排除
01
电源故障
检查电源是否正常,如电压、 电流等。
02
通信故障
检查通信接口是否正常,如串 口、以太网接口等。
市场需求持续增长
随着工业自动化程度的不断提升,PLC市场需求将持续增 长,未来PLC将在更多的行业中得到应用。
技术创新推动发展
未来PLC将在技术创新的基础上不断进步,实现更高效、 更智能、更可靠的控制,为工业自动化发展做出更大的贡 献。
THANKS
、调试和仿真。
硬件工具
使用硬件调试器,如手持 式编程器或调试适配器, 对PLC进行在线调试和监 控。
网络工具
使用网络通信工具,如串 口转USB或以太网交换机 ,实现PLC与上位机的通 信和数据传输。
plc维护方法
定期检查
定期对PLC及其周边设备进行检查, 包括电源、接线端子、电缆连接等 。
备份数据
施耐德plc标准指令库课件
目录
• plc基础概述 • 施耐德plc硬件介绍 • 施耐德plc软件介绍 • plc标准指令库 • plc编程语言 • plc调试与维护 • plc发展趋势与前景
2024施耐德ModiconM340编程手册pdf

施耐德ModiconM340编程手册pdf•ModiconM340概述•编程基础•数据处理与运算•程序流程控制目•系统功能实现•调试与故障诊断录ModiconM340概述01Modicon M340是施耐德电气推出的一款高性能可编程逻辑控制器(PLC)。
它采用了先进的处理器技术和丰富的功能模块,适用于各种工业自动化应用。
Modicon M340具有良好的可扩展性和灵活性,可以满足不同规模和复杂度的控制需求。
高速处理能力Modicon M340采用了高性能的处理器,具有快速的数据处理和执行速度。
丰富的功能模块提供了多种功能模块,包括数字量输入/输出、模拟量输入/输出、高速计数器等,可以满足各种控制需求。
强大的通信能力支持多种通信协议,如Modbus、Ethernet/IP、Profinet等,可以与其他设备进行高效的数据交换。
易于编程和调试提供了直观的编程软件和调试工具,使得用户可以轻松地进行程序编写和调试。
制造业能源与基础设施楼宇自动化物流与仓储ModiconM340应用领域Modicon M340广泛应用于各种制造业领域,如机械制造、汽车制造、食品加工等。
Modicon M340也常用于楼宇自动化系统中,如空调控制、照明控制、安防系统等。
适用于电力、水务、燃气等能源与基础设施领域,可以实现设备的自动化监控和控制。
在物流与仓储领域,Modicon M340可以实现货物的自动化搬运、分拣和存储等功能。
编程基础02施耐德Modicon M340 PLC支持多种编程语言,包括梯形图(LD)、指令表(IL)、顺序功能图(SFC)、结构化文本(ST)和函数块图(FBD)。
梯形图(LD)是一种图形化编程语言,直观易懂,适用于简单的逻辑控制。
指令表(IL)是一种类似于汇编语言的文本编程语言,适用于复杂的算法和数据处理。
顺序功能图(SFC)是一种描述顺序控制流程的图形化编程语言,适用于复杂的顺序控制系统。
结构化文本(ST)是一种高级文本编程语言,适用于复杂的数学计算和数据处理。
施耐德PLCM编程语言与编程指令
第47页/共68页
符号: 快捷键:CTRL+D 说明:选中一个已有的触点,再调用此命令, 可以在所选触点的右侧插入一个常开触点。 插入并联下触点 符号: 快捷键:SHIFT+F5 说明:选中一个已有的触点,再调用此命令,可 以在所选触点的下方插入一个常开触点。
第48页/共68页
的上升、下降沿
第30页/共68页
装入指令
第31页/共68页
N/O(常开)触点 当控制这个触点的状态为1时,触点闭合
N/C(常闭)触点 当控制这个触点的状态为0时,触点闭合
第32页/共68页
上升沿触点 检测控制位从0到1的变化
下降沿触点 检测控制位从1到0的变化
第33页/共68页
程序例:
分析:当输入点%IX0.2的状态是1,同时输入点 %IX0.3状态是0时,则输出点%QX1.0的输
第26页/共68页
指令块
基本指令块具有内部状态。每次调用该功能时,即使 输入值相同,输出值也可能不同,例如对于计数器,输 出值是递增的。
第27页/共68页
在图形表示中,基本指令块用包含多个输入和一个输 出的块结构表示。输入始终表示在块结构的左侧,而输 出始终表示在块结构的右侧。功能的名称(即功能类型) 显示在块结构的中央,即ctuex是CTU块的名称。
口 中,但并不位于任何节上,此时插入节,新插入
的 节在节将下会方出插入现节在编辑器最后一个节的后面。插入新 后符,号节:的编号会自动更新。
第61页/共68页
快捷键:CTRL+SHIFT+I
说明:使用此命令可以在LD编辑器中插入一个节。
如果光标正位于一个节上,此时新插入的节将立 即
第24页/共68页
施耐德基本指令介绍
获添置象理种类B种特~索特置而的而能特箱能
获添置度~果~的箱能检
获添置象特箱照
索种C
属”
实 果~
索特置而的而能特箱能 索特置而的而能特箱能
每置特能添的箱基索特置而的而能特箱能
获添置象理种类B种特~索特置而的而能特箱能~置特能添的箱
获添置度~果~的箱能检
获添置象特箱照
置特能添的箱 索特置而的而能特箱能
获添置度~果~的箱能~检
特箱照象而能置节C能
特箱照象能Y索特
意
B类类种 BY能特 菜类置照 照菜类置照 种菜类置照 而的箱能 节而的箱能 的箱能 节的箱能 照的箱能 节照的箱能 种的箱能 置特添种 而能置的箱理 菜而能置的箱理 能的空特 能的空特象类环象照添Y 照添能特 照添能特象添箱照象能的空特
索类节
索类节果~索默o针默踪m~类默针踪高集z踪t集o高~节高集t
果
索置类理置添空~概
每
度0
索类节始
检
每
索类节
每
每
环节箱C能的类箱~概
索类节 果 每果概
度度
每
检 每
果 每而能
度必
索类节
果
环节箱C能的类箱象B种类CK概
每|特X能特箱照而概
每|的空索种特空特箱能而概
每
检
每
每
每
索类节
索类节 检
概
每实概
每
属
索类节
度息
果
环节箱C能的类箱象B种类CK概
每|特X能特箱照而概
每
果
环节箱C能的类箱象B种类CK~环B度~~~~~~~环节箱C能的类箱象B种类CK~环B必~特X能特箱照而~环B度
获添置象的箱索节能~~~~~~~~~~~~~~~~~~~获添置象的箱索节能
schneider施耐德基本编程指令介绍
应用程序-库管理器
标准通用库,包 含常用的指令, 如定时器,计数
器
特殊用法库, 例如数据类型 转换,算术运 算,BCD运算
专用于内置 PTO/PWM的
功能库
专用于内置高速 HSC的功能库
应用程序-DUT(数据单元类型)
创建用户自定义数据类型,包括数组,结构,枚举,引用,子范围,指针; 支持面向对象的编程方式,可通过”继承”的原则对DUT进行扩展;
example: ARRAY1 :={1,2,3,1,2,3,1,2,3}; 数组成员的访问
<数组名>[下标] 示例: example[0.0]
基本概念6-结构类型
结构定义的语法规则: 示例: TYPE STRUCT1: STRUCT VAR1 : INT ; VAR2 : INT ; END_STRUCT END_TYPE
基本编程元素
菜单栏 及
快捷图标 栏
工程 设备对象 编辑区
第一节 用户界面-简介
变量声明 及初始化
程序编制 区
工具箱编 辑区
诊断消息 显示区
第二节 工程设备对象编辑器
单站控制 器类型
程序的编 制与组态
内置I/O,高速 计数及PTO组
态
内置串口组 态与配置
CANopen 组态与配置
第二节 工程设备对象编辑器-应用程序
0~255 -32768~32767
0~65535 -2147483648~2147483648
0~ 4294967295 -2^63~ 2^63-1
1.175494351e-38F~3.402823466e+38F
ASCII
UNICODE
施耐德低压柜操作程序

1施耐德低压柜操作程序一、(WATSN )电源进线柜操作程序: 1、控制器面板功能:1.1、开关状态指示灯: N(R)电源指示(黄):常亮-常(备)用电源正常;闪亮-常(备)用电源故障(断相/过压/欠压)。
N (R )闭合指示(绿):灯亮-常(备)用电源闭合。
N (R )脱扣指示:灯亮-常(备)用电源脱扣。
1.2.、数码管显示:V (V )灯亮:自动循环显示常用电源(Un 亮)和备用电源(Ur 亮)电压;T(s)灯亮:数码管以倒计时方式显示转换/返回延时时间; 运行灯亮:控制器处于正常运行状态;自动灯:常亮—控制器以自动方式工作;闪亮—自动方式下两路电源均发生故障;强制切换灯:常亮—控制器工作在强制切换状态;闪亮—强制切换方式下两路电源均发生故障。
1.3、键盘操作区:复位键:控制器复位开关↙键:运行状态—控制器自动(对应自动灯)/强制切换(对应强制切换灯)方式的转换键在设置状态—确认键(自动存储设置数据,同时进入下一项设置)2 ▲键:在强制切换方式—按下此键常用电源(N )闭合;在设置方式—递增键▼键:在强制切换方式—按下此键备用电源(R )闭合;在设置方式—递减键OFF 键: WATSN 开关置于双分(OFF )位置。
系统设置灯亮:控制器处于参数设置状态; 消防灯亮:接收到火灾报警信号。
2、操作程序: 2.1、 键盘操作:2.1.1、打开进线柜柜门,在内部(WATSN )断路器上将手动一自动开关置于“自动位置”,闭合柜门。
2.1.2、自动操作:将控制器设为互为备用工作方式(设置控制器参数第7项为NA ,并通过回车键切换为自动工作方式),通电后,如果常用电源正常,开关将自动使常用电源断路器闭合。
如果常用电源不正常,常用电源断路器断开,备用电源断路器闭合。
2.1.3、强制切换操作:通过回车键进行自动/手动强制方式的切换,当处于手动强制状态时,强制切换灯亮,然后可以通过▲键使常用电源合;通过▼键使备用电源合;通过OFF 键在无NB/RB 报警时,使开关置于 0位。
施耐德PLC的ST指令入门
施耐德PLC的ST指令入门1.编程语言传统的PLC软件编程语言,一般仅支持LD/IL/FBD,ST/SFC/CFC,往往需要安装附加的语言包才能支持。
SoMachine支持全部的6种编程语言,编程者可以根据实际的需要,任意选择编程语言。
对于SoMachine编程而言,建议编程者在选择编程语言时,应根据实际的编程方便来选择编程语言,而不是在整个程序中仅使用LD。
例如,编写算法程序时应优先考虑ST;编写顺序流程时应优先考虑SFC;编写逻辑控制时应优先考虑LD;编写功能块时应优先考虑CFC或FBD。
各品牌PLC的编程语言大同小异,各有特色。
了解了一个品牌的编程语言,其他品牌的也就能掌握基本的功能。
2.MAST任务的选择建议优先选择循环任务注意:1) 如果为某个循环任务定义的周期过短,则该任务会在写入输出后立即重复,而不会执行其他较低优先级的任务或任何系统处理。
这将会影响所有任务的执行,并导致控制器超过系统看门狗限制,从而导致系统看门狗例外。
2)可以使用 GetCurrentTaskCycle 和 SetCurrentTaskCycle 功能通过应用程序获取和设置循环执行任务间隔.3.指令优先级4.ST语言编写:指令说明注意各指令的标点符号及标点符号的输入格式。
1)赋值指令变量 := 变量或表达式例如:Var2:=Var1*10;2)IF指令1.IF 条件ATHEN 表达式A;END_IF例如:IF temp<17THEN heating_on := TRUE;END_IF2. IF 条件ATHEN 表达式A;ELSE 表达式B;END_IF例如:IF temp<17THEN heating_on := TRUE;ELSE heating_on := FALSE;END_IF;3. IF 条件A THEN 表达式A;ELSIF 条件B THEN 表达式B;...ELSIF 条件N-1 THEN 表达式N-1;ELSE 表达式N;END_IF3)CASE指令语法:CASE <控制变量> OF<数值1>: <表达式1><数值2>: <表达式2><数值3, 数值4, 数值5>: <表达式3><数值6 .. 数值10>: <表达式4>...<数值n>: <表达式n>ELSE <ELSE的表达式>END_CASE例子:CASE INT1 OF1, 5: BOOL1 := TRUE;2: BOOL2 := TRUE;10..20: BOOL3:= TRUE;ELSEBOOL1 := BOOL2 :=BOOL3 :=FALSE;END_CASE当INT1=1或5时,BOOL1为真;当INT1=2时,BOOL2为真;当INT1=10~20之间的数值时,BOOL3为真;否则,BOOL1、BOOL2、BOOL3均为假。
施奈德somachine plc M218-编程指令(带标签版)-CN

开始计时,定时到达 3s 后输出 Q 由 TRUE 变为 FALSE。
延时导通指令 TON 定时器功能块,完成开延时的功能。当定时器的输入端变为 TRUE 时,等过了一段时间后, 定时器的输出端才变为 TRUE。 指令块如下图
输入: IN:布尔型(BOOL);该输入端的上升沿触发 ET 端的计时 PT:时间型(TIME);ET 计时时间的上限值(延时时间) 输出: Q:布尔型(BOOL);一旦 ET 端计时达到上限值 PT 时,输出一个上升沿(延时时间过 去了) ET:时间型(TIME);时间的当前状态
3
标准库指令
章节内容 减计数器指令 CTD 加计数指令 CTU 加减双向计数指令 CTUD 延时断开指令 TOF 延时导通指令 TON 触发定时器指令 TP 脉冲指令 BLINK 下降沿触发指令 F_TRIG 上升沿触发指令 R_TRIG 加运算指令 ADD 减运算指令 SUB 乘运算指令 MUL 除运算指令 DIV 截尾取整指令 TRUNC 取余指令 MOD 比较等于指令 EQ 比较 大于指令 GT 比较 大于指令 GT 比较 小于等于指令 LE 比较 小于指令 LT 比较 不等于指令 NE 循环左移指令 ROL 循环右移指令 ROR 左移指令 SHL 右移指令 SHR 正弦函数 SIN 余弦函数 COS 正切函数 TAN 反正弦函数 ASIN 反余弦函数 ACOS 反正切函数 ATAN 取绝对值函数 ABS 指数函数 EXP 幂函数 EXPT 取平方根函数 SQRT 对数函数 LOG 自然对数函数 LN 取地址指令 ADR 字节长度指令 SIZEOF 二选一指令 SEL
输出指令
直接输出线圈:相关的位实体取等式的直接结果
反向输出线圈:相关的位实体取等式的直接反值
Schneider PLC编程入门必知_内存结构 MODBUS地址
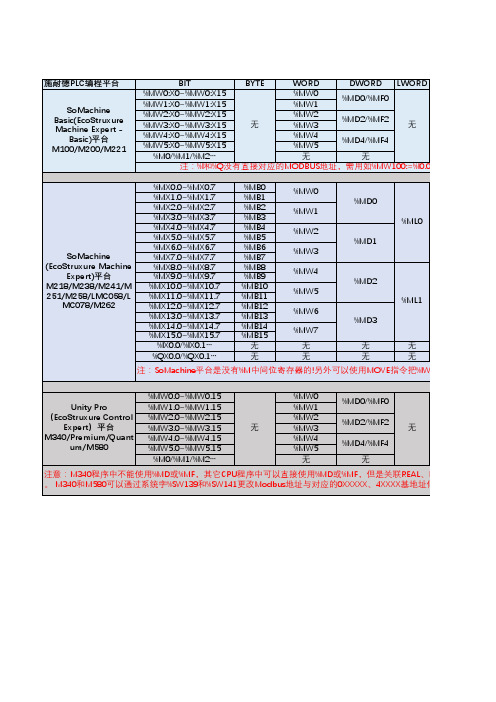
BYTE MB0 MB1 MB2 MB3 MB4 MB5 MB6 MB7 MB8 MB9 MB10 MB11 MB12 MB13 MB14 MB15
WORD MW0 MW2 MW4 MW6 MW8 MW10 MW12 MW14
西门子PLC地址内存结构
DWORD MD0 MD4 MD8 MD12
Modbus地址 40001(40001.0-40001.15) 40002(40002.0-40002.15) 40003(40003.0-40003.15) 40004(40004.0-40004.15) 40005(40005.0-40005.15) 40006(40006.0-40006.15) 00001/00002/00003… W100:=%I0.0:16操作块转换
40001(40001.0-40001.15)
40002(40002.0-40002.15)
40003(40003.0-40003.15)
40004(40004.0-40004.15)
40005(40005.0-40005.15)
40006(40006.0-40006.15)
40007(40007.0-40007.15)
%QX0.0/%QX0.1…
%MB0
%MB1 %MB2
%MB3 %MB4 %MB5 %MB6 %MB7 %MB8 %MB9 %MB10 %MB11 %MB12 %MB13 %MB14 %MB15
无
无
%MW0 %MW1 %MW2 %MW3 %MW4 %MW5 %MW6 %MW7
无 无
%MD0 %MD1
%MW2:X0~%MW2:X15
%MW3:X0~%MW3:X15
无
%MW2 %MW3
施耐德readvar指令详解

施耐德readvar指令详解摘要:1.施耐德readvar 指令概述2.readvar 指令的功能3.readvar 指令的结构和参数4.readvar 指令的应用实例5.施耐德readvar 指令的优势和局限性正文:施耐德readvar 指令详解1.施耐德readvar 指令概述施耐德电气是一家全球领先的工业制造公司,其产品广泛应用于各种工业自动化领域。
在施耐德电气的自动化控制系统中,readvar 指令是一种重要的功能指令,用于实现对模拟输入信号的连续监测。
通过readvar 指令,可以实时获取模拟输入信号的当前值,并将其保存到指定的变量中,从而为后续的控制和调节提供数据支持。
2.readvar 指令的功能readvar 指令的主要功能是实时读取模拟输入信号的值,并将其保存到指定的变量中。
在施耐德电气的自动化控制系统中,模拟输入信号通常来自于各种传感器和检测设备,如温度传感器、压力传感器等。
通过readvar 指令,可以实时监测这些信号的变化,并在控制系统中进行相应的处理和调节。
3.readvar 指令的结构和参数readvar 指令的结构相对简单,其主要由以下几个部分组成:- 指令名称:readvar- 功能代码:用于指定指令的具体功能,例如,读取模拟输入信号的值- 存储位置:指定读取到的模拟输入信号值应保存到的变量地址- 输入信号:指定要读取的模拟输入信号的通道号4.readvar 指令的应用实例以下是一个简单的施耐德readvar 指令应用实例:假设有一个温度控制系统,其中包含一个温度传感器和一个控制器。
温度传感器的信号通道号为AI1,控制器的模拟输入通道号为AI1。
我们可以使用readvar 指令实时读取温度传感器的信号值,并将其保存到控制器的变量V100 中。
具体的指令如下:```readvar AI1 to V100```这样,控制器就可以根据实时读取到的温度信号值,对系统进行相应的温度控制和调节。
施耐德可编程指导手册

浙江亚龙教仪有限公司一、运行Twidosoft软件1、概述首先进入WINDOWS,双击Twidosoft图标,屏幕显示如图1-2,屏幕分为6个区域:标题栏、菜单栏、工具栏、状态栏应用浏览器和编辑查看器。
(如图1-3)标题栏菜单栏工具栏应用浏览器状态栏编辑器和查看器图1-3选择菜单-程序-列表编辑器,进入语句表编程方式,用键盘在编辑区中输入语句表程序,包括指示代码和操作数,回车确认并自动换行。
选择菜单-程序-梯型图编辑器,进入梯型图编程方式,用鼠标点击插入梯级或编辑梯级,编辑触点条件和输出线圈。
2、菜单中常用命令说明2.1“文件”的下拉菜单●“新建”――建立新文件(与工具栏中“”功能相同)选择“新建”命令时,生成一个应用程序,在应用浏览器中显示默认为TWDLMDA40DUK 单击右键更换CPU本体,将其改成与实际工程相匹配的CPU:TWDLCAA24DRF。
●“打开”――打开一个已存的文件(与工具栏中“”功能相同)选择“打开”命令后,屏幕出现一个对话框,选择已存的文件,点击确认将其打开。
●“保存”――存储一个文件(与工具栏中“”功能相同)2当文件是新建时,选择“保存”命令后,屏幕显示保存对话框,输入文件名后,当前程序以该文件名存入。
当文件已经存在时,选择“保存”命令后,当前对文件的修改将保存在文件中。
●“另存为”――将当前程序以新的文件保存选择“另存为”命令后,屏幕显示保存对话框,选择路径并输入文件名后,当前程序以该文件名存入该路径中。
●“打印”――打印文件(与工具栏中“”功能相同)选择“打印”命令后,屏幕显示“打印”窗口,选择所要打印的文件名后,打印机打印该文件。
●“退出”――退出窗口选择“退出”命令后,退出Twidosoft程序,返回到WINDOWS。
2.2编辑●“剪切”――将语句表程序块或梯形图电路块剪切掉(与工具栏中“”功能相同)通过剪切操作,被剪切的块保存在剪切板中。
如果被剪切的数据超过剪切板容量,剪切命令被取消。
schneider(施耐德)基本编程指令介绍
继承已有数 据类型
• 声明DUT的语法规则如下: TYPE DUT1 : STRUCT VAR1 : INT ; END_STRUCT END_TYPE
数据单元类 型标志名
定义数据单 元,可以是 结构,枚举
和引用
数据类型
布尔类型
整数类型
实数类型 字符串类型 双字节字符串类型 时间数据类型
基本概念4-标准数据类型
VAR_INPUT
VAR_INPUT
IN1 : INT;
IN2 : INT;
END_VAR
END_VAR
说明: >功能块FB2包含FB1中所有的方法和变量,在使用功能块FB1的地方可用FB2替换 >FB2中不允许使用与FB1中相同的变量名 >使用FB2时,可直接使用FB1中的变量和方法,加上关键字SUPER即可 SUPER^<变量名>
• 枚举类型的访问: Light :=0;
基本概念8-引用类型
• 引用定义的语法规则: TYPE <枚举名>:(<枚举值0>,…,<枚举值n>)|<基本数据类型>; END_TYPE 示例 TYPE Light: (RED,YELLOW,GREEN:=10); END_TYPE
• 引用类型的访问: Light :=0;
关键字
BOOL
BYTE WORD DWORD LWORD SINT USINT INT UINT DINT UDINT LINT
REAL
STRING
WSTRING
TIME TIME_OF_DAY
DATE DATE_AND_TIME
值
TRUE/FALSE
0~255 0~65535 0~4294967295 0~2^64-1 -128~127 0~255 -32768~32767 0~65535 -2147483648~2147483648 0~ 4294967295 -2^63~ 2^63-1
施耐德可编程指导手册
浙江亚龙教仪有限公司一、运行Twidosoft软件1、概述首先进入WINDOWS,双击Twidosoft图标,屏幕显示如图1-2,屏幕分为6个区域:标题栏、菜单栏、工具栏、状态栏应用浏览器和编辑查看器。
(如图1-3)标题栏菜单栏工具栏应用浏览器状态栏编辑器和查看器图1-3选择菜单-程序-列表编辑器,进入语句表编程方式,用键盘在编辑区中输入语句表程序,包括指示代码和操作数,回车确认并自动换行。
选择菜单-程序-梯型图编辑器,进入梯型图编程方式,用鼠标点击插入梯级或编辑梯级,编辑触点条件和输出线圈。
2、菜单中常用命令说明2.1“文件”的下拉菜单●“新建”――建立新文件(与工具栏中“”功能相同)选择“新建”命令时,生成一个应用程序,在应用浏览器中显示默认为TWDLMDA40DUK 单击右键更换CPU本体,将其改成与实际工程相匹配的CPU:TWDLCAA24DRF。
●“打开”――打开一个已存的文件(与工具栏中“”功能相同)选择“打开”命令后,屏幕出现一个对话框,选择已存的文件,点击确认将其打开。
●“保存”――存储一个文件(与工具栏中“”功能相同)2当文件是新建时,选择“保存”命令后,屏幕显示保存对话框,输入文件名后,当前程序以该文件名存入。
当文件已经存在时,选择“保存”命令后,当前对文件的修改将保存在文件中。
●“另存为”――将当前程序以新的文件保存选择“另存为”命令后,屏幕显示保存对话框,选择路径并输入文件名后,当前程序以该文件名存入该路径中。
●“打印”――打印文件(与工具栏中“”功能相同)选择“打印”命令后,屏幕显示“打印”窗口,选择所要打印的文件名后,打印机打印该文件。
●“退出”――退出窗口选择“退出”命令后,退出Twidosoft程序,返回到WINDOWS。
2.2编辑●“剪切”――将语句表程序块或梯形图电路块剪切掉(与工具栏中“”功能相同)通过剪切操作,被剪切的块保存在剪切板中。
如果被剪切的数据超过剪切板容量,剪切命令被取消。
施耐德PLC Twido PLC 可编程控制器 第六章、指令
第六章、指令6-1 布尔指令6-2 标准功能块6-2-1 定时器功能块6-2-2 计数器功能块6-2-3 移位寄存器功能模块(%SBRi) 6-2-4 步进计数器功能模块(%SCi)6-3 数字处理指令6-3-1 赋值指令6-3-2 比较指令6-3-3 算术指令6-3-4 逻辑指令6-3-5 移位指令6-3-6 转换指令6-3-7 单/双字转换指令6-3-8 浮点算术指令6-3-9 三角指令6-3-10 转换指令6-3-11 整数转换指 <-> 浮点6-3-12 表求和功能6-3-13 表比较指令6-3-14 表查找指令6-3-15 表最大值和最小值查找功能6-3-16 表中某个值的出现次数6-3-17 表循环移动功能6-3-18 表排序功能6-4 程序控制指令6-4-1 END指令6-4-2 跳转指令6-4-3 子程序指令6-5 专用功能块6-5-1 LIFO/FIFO寄存器功能模块(%Ri) 6-5-2 脉宽调制功能模块(%PWM)6-5-3 脉冲发生器输出功能模块(%PLS)6-5-4 磁鼓控制器功能模块 (%DR)6-5-5 高速计数6-5-6 超高速计数器功能模块(%VFC)6-5-7 调度模块6-6 通讯指令6-6-1 信息发送/接收6-6-2 数据交换控制6-1 布尔指令掌握要点:布尔指令:用语所有位元件Load指令(装入):LD,LDN,LDR,LDF分别对应常开,常闭,上升沿,和下降沿其中: N 代表“非”R 代表“上升沿”F 代表“下降沿”程序例:逻辑AND 指令 : AND, ANDN , ANDR , ANDF。
逻辑与指令执行操作数(或它的反转数,或上升沿,或下降沿)和前面指令的布尔运算结果间的逻辑与操作。
程序例:逻辑OR指令: OR , ORN , ORR , ORF,逻辑或指令执行操作数(或它的反转数,或上升沿,或下降沿)和前面指令的布尔运算结果间的逻辑或操作。
施耐德ATV212变频器编程手册

ATV212异步电机变频器编程手册09/2011S C D O C 1564关于本书关于本书概览文档范围本文档的目的是:•帮助您设置变频器,•向您展示如何对本变频器进行编程,•向您展示不同的菜单、模型和参数,•帮助您维护和诊断。
有效性说明本文档适用于 ATV212 变频器。
相关文档您可以从我们的网站下载这些技术资料的最新版本以及其他技术信息。
文档标题文档参考号ATV212 Quick Start (ATV212 快速入门)S1A53831ATV212 Installation manual (ATV212 安装手册)SCDOC1563ATV212 Modbus manual (ATV212 Modbus 手册)S1A53844ATV212 BACnet manual (ATV212 BACnet 手册)S1A53845ATV212 Metasys N2 manual (ATV212 Metasys N2 手册)S1A53846ATV212 Apogée FLN P1 manual (ATV212 Apogée FLN P1 手册)S1A53847ATV212 LonWorks manual (ATV212 LonWorks 手册)S1A53848Multiloader manual (Multiloader 手册)BBV48778SoMove Mobile manual (SoMove Mobile 手册)S1A51444ATV212 其他选件手册:参见目录安全信息. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5关于本书. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6概述. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13第 1 章设置 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .15变频器安装步骤 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16第 2 章概述 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .17出厂配置. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18初步建议. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19集成显示面板 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20监视模式. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22运行模式. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25编程模式. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25菜单导航. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26子菜单. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32图形显示选件 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33查找本文档中的参数. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35检测故障屏幕 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35预警屏幕. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36Modbus 通讯状态. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36PCSoft 软件工作台. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37参数表的结构 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38在变频器运行期间不能被修改的参数 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39常用控制方案 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40变频器操作 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47编程. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55第 3 章快捷菜单. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .57快捷菜单 AuF . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58第 4 章编程参数. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .63参数复位. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64宏编程 (AU4) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65参数锁定. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66子菜单 AUF (F738) 显示. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66第 5 章电机控制参数 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .67电机控制模式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68其他电机控制模式参数 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70电机调整. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72自整定. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73专家参数. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74电源电压校正和电机电压限制. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75第2电机控制参数. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76目录第 6 章电机控制参数 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .79第 7 章应用参数. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .83应用参数. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84跳频 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89直流注入制动参数. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90第 8 章输入/输出控制参数 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .91逻辑输入功能 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92逻辑输入功能兼容性. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99继电器输出功能 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100模拟输入功能 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106模拟输出功能 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107模拟输入调节 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108有效的逻辑功能 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114预置速度. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114+/- 速度控制参数. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115风阀控制. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118第 9 章显示参数. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .121显示参数. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122第 10 章检测故障管理参数. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .125延时 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127飞车启动 (F301). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128过转矩检测 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134避免有害的过电压和输入相检测故障 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135电机过载特性 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 136第 11 章串行通讯参数 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .139 ATV212 变频器与主控制器之间的网络通讯 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 140数据结构参数 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142第 12 章速度给定等级控制的启动/停止控制. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .145概述 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146第 13 章降速控制. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .147降速控制原则 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 148诊断和故障检修. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 149第 14 章诊断和故障排除 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .151检测故障状态 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152报警状态. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 156预警条件. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157清除检测到的故障. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 158附录. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159第 15 章转换 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .161从 ATV21 到 ATV212 的转换 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162第 16 章参数复位表 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .163不随复位类型变化的参数值 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 164根据复位类型变化的参数值 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 168随变频器型号变化但不随复位类型变化的参数值 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 169根据变频器额定而不是复位类型变化的参数值 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 170设置变频器安装步骤概述概述2本章内容本章包含下列主题:主题页码出厂配置18初步建议19集成显示面板20监视模式22运行模式25编程模式25菜单导航26子菜单32图形显示选件33查找本文档中的参数35检测故障屏幕35预警屏幕36Modbus 通讯状态36PCSoft 软件工作台37参数表的结构38在变频器运行期间不能被修改的参数39常用控制方案40变频器操作47概述出厂配置变频器出厂设置ATV212 的出厂设置用于最常见的工作条件:z[电机控制模式](Pt):[可变转矩] (Pt = 1)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
数据长度
1 8 16 32 64 8 8 16 16 32 32 64 64 80(default)
整数类型
实数类型 字符串类型 双字节字符串类型
时间数据类型
基本概念5-数组类型
• • 支持一维,二维,三维数组,属于基本数据类型,可以直接在POU GVL中定义 POU或 支持一维,二维,三维数组,属于基本数据类型,可以直接在POU或GVL中定义 数组定义的语法规则: 数组定义的语法规则: 数组名>:ARRAY[<I1>..<U1>,<I1>..<U2>,<I3>..<U3>]OF<基本数据类型> >:ARRAY[<I1>..<U1>,<I1>..<U2>,<I3>..<U3>]OF<基本数据类型 <数组名>:ARRAY[<I1>..<U1>,<I1>..<U2>,<I3>..<U3>]OF<基本数据类型> 其中,I1,I2,I3为下限 U1,U2,U3为上限 为下限, 其中,I1,I2,I3为下限,U1,U2,U3为上限 示例: 示例: ARRAY1 : ARRAY[0..2,0..2] OF INT; 数组初始化 example: ARRAY1 :={1,2,3,1,2,3,1,2,3}; 数组成员的访问 <数组名>[下标] 数组名>[下标] >[下标 示例: 示例: example[0.0]
• •
基本概念6-结构类型
• 结构定义的语法规则: 结构定义的语法规则: 示例: 示例: TYPE STRUCT1: STRUCT VAR1 : INT ; VAR2 : INT ; END_STRUCT END_TYPE 结构初始化 example: STRUCT1 :={10,11}; 结构成员的访问 结构名>.<成员名> >.<成员名 <结构名>.<成员名> 示例: 示例: example.VAR1
• •
基本概念7-枚举类型
• 枚举定义的语法规则: 枚举定义的语法规则: <枚举名>:(<枚举值0>,…,<枚举值n>)|<基本数据类型>; 枚举名>:(<枚举值0>, ,<枚举值n>)|<基本数据类型 TYPE <枚举名>:(<枚举值0>, ,<枚举值n>)|<基本数据类型>; END_TYPE 示例 TYPE Light: (RED,YELLOW,GREEN:=10); END_TYPE 枚举类型的访问: 枚举类型的访问: Light :=0;
•
程序调用的原则; 程序调用的原则; 程序可以被其它POU POU调用 >程序可以被其它POU调用 >函数中不能调用程序 >程序没有实例
基本概念11-函数
• • 函数是仅返回一个值的POU 函数是仅返回一个值的POU 函数声明的语法规则: 函数声明的语法规则: <函数名>:<数据类型 函数名>:<数据类型> FUNCTION <函数名>:<数据类型>
全局变量定义, 全局变量定义, VAR_GLOBAL”开 “VAR_GLOBAL 开 END_VAR”结 头,”END_VAR 结 尾
常量关键字
保持型变量 关键字
基本概念1-变量定义语法规则
• • 变量声明必须符合以下语法规则: 变量声明必须符合以下语法规则: 变量名> <地址 地址>} :<数据类型 {:=<初始化值 数据类型> 初始化值>}; <变量名> {AT <地址>} :<数据类型> {:=<初始化值>}; 变量名的定义规则: 变量名的定义规则: 不得包含空格和特殊字符; >不得包含空格和特殊字符; 不区分字母大小写; >不区分字母大小写; 可以识别下划线,但不支持连续的两个下划线; >可以识别下划线,但不支持连续的两个下划线; 名称长度没有限制; >名称长度没有限制 变量名定义注意事项: 变量名定义注意事项 不能在局部域内重复使用同一个变量名; >不能在局部域内重复使用同一个变量名; 变量名不能与关键字同名; >变量名不能与关键字同名; 可以在全局域内多次使用同一个变量名; >可以在全局域内多次使用同一个变量名; >一个全局变量列表中定义的变量名称可以与另一个全局变量列表中定义的 变量相 同;
继承已有数 据类型
•
声明DUT的语法规则如下: 声明DUT的语法规则如下: DUT的语法规则如下 TYPE DUT1 : STRUCT VAR1 : INT ; END_STRUCT END_TYPE
数据单基本概念4-标准数据类型
数据类型
基本编程元素
第一节 用户界面-简介
菜单栏 及 快捷图标 栏 变量声明 及初始化
程序编制 区 工程 设备对象 编辑区 工具箱编 辑区
诊断消息 显示区
第二节 工程设备对象编辑器
单站控制 器类型 程序的编 制与组态 内置I/O,高速 内置I/O,高速 I/O, 计数及PTO PTO组 计数及PTO组 态 内置串口组 态与配置
•
功能块调用的原则; 功能块调用的原则; 通过功能块实例的方式调用, 实例名>.<变量名> >.<变量名 >通过功能块实例的方式调用,<实例名>.<变量名>; 从功能块实例的外部仅能访问功能块的输入/输出参数,不能访问内部参数; >从功能块实例的外部仅能访问功能块的输入/输出参数,不能访问内部参数; 声明为某个POU局部变量的实例时,仅能被该POU调用;声明为全局变量的实例时, POU局部变量的实例时 POU调用 >声明为某个POU局部变量的实例时,仅能被该POU调用;声明为全局变量的实例时, 才能被各POU调用; POU调用 才能被各POU调用;
•
函数调用的原则; 函数调用的原则; 本次调用时对函数内部变量值的改变不会影响下一次调用, >本次调用时对函数内部变量值的改变不会影响下一次调用,即每次调用时输入参数 相同,其返回值必定相同。建议: 相同,其返回值必定相同。建议:在函数中不要使用全局变量和地址 >ST中可将函数返回值当作操作数参与运算 >ST中可将函数返回值当作操作数参与运算
•
基本概念9-指针类型
• 指针定义的语法规则: 指针定义的语法规则: <枚举名>:(<枚举值0>,…,<枚举值n>)|<基本数据类型>; 枚举名>:(<枚举值0>, ,<枚举值n>)|<基本数据类型 TYPE <枚举名>:(<枚举值0>, ,<枚举值n>)|<基本数据类型>; END_TYPE 示例 TYPE Light: (RED,YELLOW,GREEN:=10); END_TYPE 指针类型的访问: 指针类型的访问: Light :=0;
•
应用程序-POU
程序组织单 元名称
程序组织单 程序组织单 元类型
程序组织单 程序组织单 元的实现语 言
Unit,程序组织单元,可以是程序, POU: Program Organization Unit,程序组织单元,可以是程序,功能块或函数
基本概念10-程序
• • 程序是执行时能够返回一个或多个值的POU,所有变量值能够从本次程序执行结束保持 程序是执行时能够返回一个或多个值的POU,所有变量值能够从本次程序执行结束保持 POU, 到下一次执行 程序声明的语法规则: 程序声明的语法规则: <程序名 程序名> PROGRAM <程序名>
专用于内置高速 HSC的功能库 HSC的功能库
应用程序-DUT(数据单元类型)
• • 创建用户自定义数据类型,包括数组,结构,枚举,引用,子范围,指针; 创建用户自定义数据类型,包括数组,结构,枚举,引用,子范围,指针; 支持面向对象的编程方式,可通过”继承”的原则对DUT进行扩展; DUT进行扩展 支持面向对象的编程方式,可通过”继承”的原则对DUT进行扩展;
基本概念3-变量初始化
• • 所有变量的默认初始化值都为0; 所有变量的默认初始化值都为0; 赋值操作符”:=”用于指定用户自定义初始化值 用于指定用户自定义初始化值; 赋值操作符”:= 用于指定用户自定义初始化值; 示例: 示例: VAR VAR1 : INT := 1 ; VAR2 : INT := 2+ FUN(3); VAR3 : POINTER TO INT := ADR(VAR4);
CANopen组 CANopen组 态与配置
第二节 工程设备对象编辑器-应用程序
全局变量定 义区
库管理器, 库管理器, 用于添加编 辑库
任务配置区, 任务配置区,用于 定义程序执行的任 务类型
应用程序-GVL
全局变量列表,作用于全局范围内的变量可以在此定义. GVL: 全局变量列表,作用于全局范围内的变量可以在此定义.
•
基本概念2-保持型变量
• • 保持型变量在整个程序运行期间保持值; 保持型变量在整个程序运行期间保持值; 可以单纯声明成以下三种类型,每种类型都有单独的存储空间: 可以单纯声明成以下三种类型,每种类型都有单独的存储空间: >RETAIN 示例: 示例: VAR RETAIN VAR1 : INT; VAR_END PLC正常断电 上电/意外断电之后变量的值保持,但是“初始化复位” 冷启 正常断电/ PLC正常断电/上电/意外断电之后变量的值保持,但是“初始化复位”/”冷启 重新下载程序会使RETAIN类型数据重新初始化。 RETAIN类型数据重新初始化 动”/ 重新下载程序会使RETAIN类型数据重新初始化。 >PERSISTENT 示例: 示例: VAR_GLOBLE PERSISTENT VAR1 : INT; VAR_END PLC重新启动 初始化复位 重新启动/ 初始化复位” PERSISTENT类型数据被重新初始化 类型数据被重新初始化, PLC重新启动/”初始化复位”后PERSISTENT类型数据被重新初始化,下载程序后 值保持不变.注意: 仅全局性变量能成为PERSISTENT变量! PERSISTENT变量 值保持不变.注意: 仅全局性变量能成为PERSISTENT变量! >RETAIN+PERSISTENT 示例: 示例: VAR_GLOBLE PERSISTENT RETAIN VAR1 : INT; VAR_END 继承RETAIN PERSISTENT的属性 可通过”初始化复位” RETAIN和 的属性, 继承RETAIN和PERSISTENT的属性,可通过”初始化复位”对变量进行初始化