AGV搬运机器人PPT课件
AGV工作设计原理PPT幻灯片课件

2)自由路径导引:事先没有设置固定的运行路径, AGVS根据搬运任务要求的起讫点位置,计算机管
理系统优化运算得出最优路径后,由控制系统控 制各个AGV按照指定的路径运行,完成搬运任务。
2019/10/7
7
请判断以下AGV属于哪种类型?
2019/10/7
11
2 AGV
的
结
构
组
成
1—安全挡圈 2、11—认址线圈 3—失灵控制线圈 4—导向探测器 5—转向轮 6—驱动电机 7—转向机构 8—导向伺服电机 9—蓄电池 10—车架 12—制动器 13—驱动车轮 14车上控制器
2019/10/7
12
2 AGV的典型部件
2.1 车体 车体由车架和相应的机械装置所组成,是AGV的基础部分, 是其他总成部件的安装基础;
AGV
主要内容:
AGV的概念; AGV及AGVS的结构组成; AGV主要技术参数及工作原理
2019/10/7
1
引导案例
2019/10/7
2
ZPMC开发的自动导向车(AGV)系统
2019/10/7
3
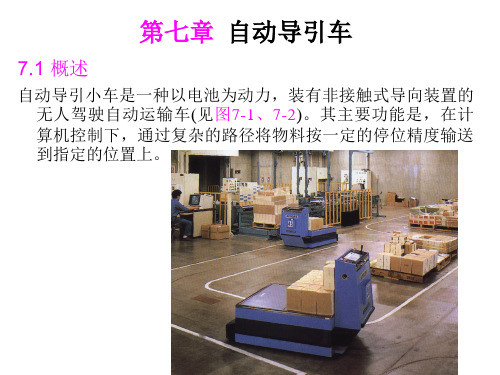
1 概述
1.1 AGV的基本概念
根据美国物流协会定义,AGV (Automated Guided Vehicle)是指装备有电磁或光学导引装置,能够按照规定的 导引路线行驶,具有小车运行和停车装置、安全保护装置以 及具有各种移载功能的运输小车。
AGV所处的地面状态,并与地面控制站
实时进行信息传递。
导引原理
2019/10/7
15
的具 搬有 运不 小同 车移
载 引原理
AGVPPT课件

• 无线通讯模块(RF):在AGV小车和上位 机中起着媒介作用,上位机发送的控制 命令通过无线通讯装置到小车微控制器 ,当小车反馈自身状态时,则通过无线 通讯装置发送给主机
4
AGV动力总成分类和控制策略
.
7
Motor Control(运动和驱动模块)
.
8
Motor controller
• Motor style: PMSM • Battery voltage: 48V • MOSFETs with 100V (D2PAK/TO220) - usage : 6/12/18pcs • Rotor monitoring : resolver / decoder • Gate driver : • MCU: M3/M4 • Current samping : shunt resistor +AMP or hall • Others for current samping : with the increasing of quality of AGV , the
AGV控制策略
运动距离的控制:如果是步进电机,需要 采用速度闭环控制驱动电机转动;如果是 PMSM(目前主流),则需要伺服功能精确 控制电机转子停止位
-运动速度的控制:AGV小车不可以开的过 快,而且要平稳,需要PID算法设置实现速 度环路的控制
-运动方向的控制:精确实现电机转动的 正反向
.
5
舵轮的选择和结构布置
• Current sensing between DC+ and DC- : from battery system provider
【机械制造】AGV简介ppt模版课件
• 在出库站和拆箱机器人处移载站都设有红外光通讯系统, 其主要功能是完成移载任务的通讯。
• AGV充电可以采用在线自动快速充电方式
7.1.4 AGV的典型产品
7.2 AGV的导引方式
AGV的导引方式,所谓AGV导引方式是指决定其运行方向和 路径的方式。它不同于前面所说的一般通信。
常用的导引方式分两大类:车外预定路径方式和非预定路径 方式。
• 车外预定路径导引方式是指在行驶的路径上设置导引用 的信息媒介物,AGV通过检测出它的信息而得到导向的导引 方式,如电磁导引、光学导引、磁带导引(又称磁性导引) 等。
3.驱动装置。 驱动装置是一个伺服驱动的变速控制系统, 可驱动AGV运行并具有速度控制和制动能力。它由车轮、 减速器、制动器、电机及速度控制器等部分组成,并由计 算机或人工进行控制。速度调节可采用脉宽调速或变频调 速等方法。直线行走速度可达1m/s,转弯时为0.2~0.5m/s, 接近停位点时为0.1m/s。
(2) 反光带或磁带导引
1)反射式导向。如图7-11所示, 这种引导方式是在地面上连 续铺设一条用发光材料制作 的带子,或者用发光涂料涂 抹在规定的运行路线上,在 车辆的底部装有检测反射光 传感器,通过偏差测定装置 到驱动转向电机来不断调整 车辆前进的方向
2)磁性式导向。是在地面上连 续铺设一条金属磁带,而在 车辆上装有磁性传感器,检 测磁带的磁场,通过磁场偏 差测定控制驱动转向电机来 调整车辆行驶方向。
• 如日本产的红外线传感器能检测搬运车的前后方向、 左右方向的障碍物,也能在二段内设定慢行和停止, 也即2m内减速、lm内停车。发射的光频率数有4种或8 种,能防止各搬运车间的相互干扰。
智能循迹搬运机器人ppt

基于机器学习的路径规划算法优化
2
搬运机器人硬件系统搭建与实验
3
THANK YOU.
系统调试
通过测试和调试来验证系统的正确性和可靠性,包括搬运任 务测试、循迹测试等。
05
实验结果和分析
实验设定和数据收集
实验场地
选择一块长10米,宽5米的平坦场地,场地一端 放置起点,另一端放置终点。
实验设备
智能循迹搬运机器人,具有循迹、避障、搬运等 功能。
数据收集
在实验中收集机器人的运行数据,包括循迹时间 、搬运距离、搬运时间等。
A*算法
最常用的路径规划算法之一,通过评估每个可能的路径,找出最优路径。
Dijkstra算法
适用于没有负权重的图,找出从起点到终点的最短路径。
RRT*算法
适用于解决实时的、在线的路径规划问题,能在复杂环境中找到有效路径。
运动控制技术
PID控制
广泛应用于机器人运动控制中,通过调整比例、 积分和微分参数,实现精确的位置和速度控制。
轨迹跟踪控制
通过预瞄距离和速度,控制机器人按照预定轨迹 运动。
摩擦补偿
考虑地面摩擦力对机器人运动的影响,通过补偿 摩擦力,提高机器人的运动精度。
人工智能技术在智能循迹搬运机器人的应用
深度学习
用于识别环境中的物体和地形,以及预测未来可能发生的情况。
强化学习
用于训练机器人在复杂环境中的决策能力,使其能够自我学习和 优化决策。
02
智能循迹搬运机器人概述
智能循迹搬运机器人的工作原理
01
传感器检测
智能循迹搬运机器人通过装载的传感器检测地面材质、颜色、纹理等
信息,识别并跟踪指定的路径。
02
无人搬运小车-PPT文档资料

深圳市米克力美科技有限公司i-so/
I-SO VVX200AGV参数
引导方式:磁条引导(RFID站点控制) 驱动方式: 双轮差速驱动 运载重量:(标准)200KG/(高速)100KG 长*宽*高: 980mm * 400mm * 210mm 行驶速度: 约50m/min<高速模式100m/min> 最小转弯半径:R23mm 精 度: ±10mm 连续作业时间:连续工作时间大于48小时(根据电池标配) 安全特性: 机械防撞装置、障碍物传感器、紧急开关
深圳市米克力美科技有限公司i-so/
AGV的优点
• AGV的几大优点:
节省搬运能力,减少管理人员。 降低用工成本,提高效益。 减少用工烦恼,提高企业形象。 减轻劳动强度,提高效率。 我们的目的: 让工厂变得更加自动化!——减少的不仅是用工成本, 还有用工的烦恼,提高的不仅是企业的效益,还有企业的形象。
深圳市米克力美科技有限公司i-so/
提供整体解决方案
米克力美科技专业提供智能化、模块化、简单化、个性化 AGV物流系统整体解决方案
• 多重安全系统,实时监测障碍物距离,障碍物全范围覆盖,实现多级 减速,减少紧急停车对货物损坏,失效模式下确保安全系统正常运行。 • 整机低功耗设计,一次充电满载运行48H,24*7不间断工作。 • 全天候AGV状态监测,自动优化形势路径,确保高效运行。 • 免维护设计,人性化人机界面,操作简单,无需技术人员管理。 • 智能化中央控制系统,实时智能监测AGV状态与物料调度。 • 轻量化AGV铝合金车身,超静音传动系统。 • 技术先进,价格合理,服务完善,快速收回投资。
agv技术应用ppt课件

❖ 但海尔的事实是,黄岛立体库长120米、宽60米, 仓储面积5 400m2,立体库有9 168个标准托盘位, 托盘是1.2×1米的;立体库的建筑高度是16米, 放货的高度可到12.8米,每天进出的托盘达到1 200个,实际能力是1 600个。
❖ 作用:采用自动或人工方式 装载货物,按设定的路线自 动行驶或牵引着载货台车至 指定地点,再用自动或人工
方式装卸货物的工业车辆。
❖ 功能:在计算机控制下,将 物料按一定的停位精度输送 到指定的位置上。
2. AGV的发展状况
❖ 世界上第一台AGV是由美国Barrett电子公司于20世 纪50年代初开发成功的,它是一种牵引式小车系统 ,可十分方便地与其他物流系统自动连接,显著地 提高劳动生产率,极大地提高了装卸搬运的自动化 低;
❖ 利用管理,货位集中便于控制,借助计算机能有效的利用仓 库储存能力,便于清点盘货,合理减少库存,节约流动资金;
❖ 能适应黑暗、有毒、低温等特殊场合的需要。
2. 自动化立体仓库的优缺点
(2)缺点
❖ 结构复杂,配套设施多,需要的基建和设备投资 高;
❖ 货架安装精度要求高,施工比较困难,且施工周 期长;
2.按照货架形式分类
❖ 单元式货架仓库:单元 式货架仓库使用最广, 通用性也较强。其特点 是货架沿仓库的宽度方 向分为若干排,每两排 货架为一组,其间有一 条巷道,供堆垛机或其 他仓储机械作业。
❖ 贯通式货架仓库:为了 进一步提高仓库面积的 利用率,可以取消位于 各排货架之间的巷道, 将货架合并在一起,使 在同一层、同一列的货 物互相贯通,形成能依 次存放许多货物单元的 通道,而在另一端由出 库起重机取货。
AGV基础知识介绍pptx

AGV特点
高精度导航:AGV采用先进的导航技术,如激光雷达 、惯性测量单元等,实现高精度路径规划和定位。
可扩展性强:AGV可通过不同的装载和卸载设备,适 应不同的应用场景。
AGV发展历程
1 2
早期AGV
20世纪50年代,美国开始研究AGV,主要应用 于军事和航天领域。
3
有些AGV可能还具有爬坡能力和紧急制动能力 ,以确保其在各种地形和突发情况下的安全性 。
感知系统
01
AGV的感知系统包括各种传感器,例如超声波传感器、雷达传感器和光电传感 器等。
02
这些传感器帮助AGV感知其周围的环境,例如障碍物、人员和其他AGV等,以 便及时采取行动避免碰撞或确保安全通过。
03
惯性导航
02
利用陀螺仪和加速度计测量AGV的加速度和角速度,结合路径
信息进行积分计算,实现AGV的导航。
视觉导航
03
利用摄像头捕捉环境中的特征点,结合机器视觉算法进行定位
和导航。
路径规划技术
基于规则的路径规划
根据一些预定义的规则和几何约束进行路径规划,生成可行的路 径。
基于搜索的路径规划
将路径规划问题转化为搜索问题,通过搜索算法寻找最优路径。
评估AGV的故障率、维修 率等指标,确保AGV的稳 定性和可靠性。
评估AGV的能耗,包括电 池寿命、充电时间、运行 成本等,以衡量AGV的经 济性能。
评估AGV运行过程中的噪 音水平,以衡量AGV对环 境的影响。
评估AGV的维护性,包括 维护难易程度、备件供应 等,以衡量AGV的可维护 性。
AGV成本评估
医疗行业
AGV可应用于医疗物资自动化运输 、药品分发、病人转运等场景,提 高医疗效率和服务质量。
AGV搬运机器人课件.doc
AGV搬运机器人1.了解AGV搬运车随着科技水平的迅猛发展,许多高科技产品也在不断地发生质的变化,特别是工厂应用中,搬运车的进步就更加体现了人类的智慧,更是加速了工业化的发展。
所谓搬运车,就是搬运货物作用的物流设备,又叫托盘车,常见于工厂或仓库中物料的搬运。
搬运车分为手动搬运车,半自动搬运车以及全自动搬运车。
手动搬运车在使用时将其承载的货叉插入托盘孔内,由人力驱动液压系统来实现托盘货物的起升和下降,并由人力拉动完成搬运作业,是托盘运输中最简便,最有效,最常见的装卸,搬运工具。
如今最常用的搬运车,AGV,经过数次的改造与优化,已经大大的促进了工厂里的工作效率,节省了人力,同时也应用到更多其他领域,包括医院,实验室等操作场所。
AGV意为无人引导小车,指装有自动引导装置,能够沿规定的路径行驶,在车体上具有编程和车体选择装置,安全保护装置以及各种物料移载功能的搬运车辆。
根据美国物流协会定义,AGV是指备有电磁或光学引导装置,能够按照规定的导引路线行驶,具有小车运行和停车装置,安全保护装置以及具有各种移载功能的运输小车。
米-克-力-美-科-技2.与传统搬运车的比较传统搬运车界面操作复杂,按钮多,非专业人员很难在短时间内学会并控制好搬运车的移动与运货作业。
而现代的智能AGV搬运小车,采用了安卓控制系统,操作人员无需培训,只要会玩手机就能操作AGV小车的移动与搬运作业。
界面简洁明了,美观大方,更是工业制造中的好帮手。
传统搬运车,按钮多。
智能AGV小车,安卓界面,简洁明了。
传统的搬运小车大多采用红外线障碍物检测,无法做到全范围检测,存在大量盲区。
红外线检测会受光线,温度,颜色的干扰,因此造成检测结果的不精确性。
一旦检测到有障碍物,会停止工作,直到障碍物排除,这在一定程度上降低了车间工作的效率。
而智能AGV 采用自动避障物测距系统,可根据障碍物距离进行多级减速缓冲停车,智能AGV实时量化测量障碍物距离,而非传统AGV的探测障碍物后产生的开关信号。
AGV产品介绍 ppt课件

AGV产品介绍
推挽式AGV的执行机构能左右伸缩装卸货物,适合于运行空间 狭小、 AGV需要两边装卸货物的地方。
主要技术参数表
导引方式 行走功能 驱动及转向方式 额定载荷 前行速度 转弯速度 执行机构 制动方式 导引精度 停位精度 工作噪声 电池配备
通讯方式 安全系统
激光导引 前进、后退、转弯
单轮驱动兼转向 600kg
AGV产品介绍
BJ311型\单轮驱动\后叉式
目前昆船销售数量最多的车型。它体积小巧,运行灵活, 能够广泛用于标准欧式托盘的搬运,大量运用于烟厂、电力等行业。
主要技术参数表
导引方式 行走功能 驱动及转向方式 额定载荷 最大举升高度 前行速度 转弯速度 执行机构 制动方式 导引精度 停位精度
工作噪声 电池配备
通讯方式 安全系统
主要技术参数表
激光导引 前进、后退、转弯、侧移
全方位驱动 1000-3000kg Max 60m/min Max 30m/min,根据实际应用可调整 辊道、链式等 减速电机、电磁制动
±10mm ±3mm ≤65dB(A) 48V或24V,超高倍率碱性电池或普通免维护铅酸电池,电池容量根 据AGV单机总功率确定。 无线局域网 前方:非接触式防护+防护栏 上方:急停按钮
通讯方式 安全系统
激光导引 前进、后退、转弯
单轮驱动兼转向 1000kg 4.5m
Max 60m/min Max 30m/min,根据实际应用可调整
液压举升 减速电机、电磁制动
±10mm ±5mm
≤65dB(A) 48V或24V,超高倍率碱性电池或普通免维护铅酸电池,电池容量根 据AGV单机总功率确定。
无线局域网 前方:非接触式防护+防护栏 上方:急停按钮
搬运机器人.

搬运机器人的机械设计------臂部设计
手臂的各种运动通常用 驱动机构(如液压缸或 者气缸)和各种传动机 构来实现,从臂部的受 力情况分析,它在工作 中既受腕部、手部和工 件的静、动载荷,而且 自身运动较为多,受力 复杂。因此,它的结构、 工作范围、灵活性以及 抓重大小和定位精度直 接影响机械手的工作性 能。
搬运机器人的机械设计------腕部设计
目前 , 应 用最为广 泛 的手腕回 转运动机 构 为回转液压(气)缸, 它的结构 紧凑 , 灵 巧 但回转角 度小 ( 一 般 小于 270 °) , 并且要 求严格密 封 , 否则 就 难保证稳 定的输出 扭 矩。因此 在要求较 大 回转角的 情况下 , 采 用齿条传 动或链轮 以 及轮系结 构 。 举例 设 计的搬运 机器人的 腕 部是实现手部 180°的 旋转运动
手部多为两指(也有多指);根 据需要分为外抓式和内抓式两种; 也可以用负压式或真空式的空气 吸盘(主要用于可吸附的,光滑 表面的零件或薄板零件)和电磁 吸盘。
传力机构形式较多,常用的有: 滑槽杠杆式、连杆杠杆式、斜楔 杠杆式、齿轮齿条式、丝杠螺母 式、弹簧式和重力式。本次设计 的手部选择夹持类回转型结构手 部。
搬运机器人可安装不同的末端执行器 以完成各种不同形状和状态的工件搬 运工作,大大减轻了人类繁重的体力 劳动。目前世界上使用的搬运机器人 愈10万台,被广泛应用于机床上下料、 冲压机自动化生产线、自动装配流水 线、码垛搬运、集装箱等的自动搬运。 部分发达国家已制定出人工搬运的最 大限度,超过限度的必须由搬运机器 人来完成。
1.步进电机 2.标准气缸 3.标准气缸 4.平行气爪
四自由度搬运机器人结构简图
机械手结构示意图
AGVPPT课件
.
单舵轮(不常采用) 双舵轮以及多个舵轮 -舵轮中线布置(如右图),控制器左右各 有1套电机 -舵轮对角布置,每个角落布置1台电机
demand of current is steadily raising so we can find more and more opportunity of Hall IC ;
.
9
Current sensing
• Current sensing between phases : Hall devices with usage of 2pcs
AGV动力总成
Blossom Everywhere
Cliff Zhao Product Marketing Manager
AGV定义和概述
• 自动导引小车(Automatic Guided Vehicle)是一种在计算机 监控下,根据具体规划和作业 要求完成取货,送货,充电等 任务的无人驾驶自动化电动车 辆,广泛用于智能仓储物流系 统中,其效率高,灵活性好, 在欧洲为代表的技术先进国家 中得到广泛应用,并逐步在生 产,装配生产中占据一席之地 。
.
7
Motor Control(运动和驱动模块)
.
8
Motor controller
• Motor style: PMSM • Battery voltage: 48V • MOSFETs with 100V (D2PAK/TO220) - usage : 6/12/18pcs • Rotor monitoring : resolver / decoder • Gate driver : • MCU: M3/M4 • Current samping : shunt resistor +AMP or hall • Others for current samping : with the increasing of quality of AGV , the
移动式机器人系统设计PPT课件

少的核心装备,由于关节式机器人操作手的基座是固定的,其工作空间就 会受到限制,为了突破关节式机器人操作工作空间的限制,可以给其装备 移动机构,这样就构成了移动式机器人系统。 • 移动式机器人系统是将关节式机械手安装在行走机构上所构成的一类机器 人,其中机械手用来实现如抓取、操作等动作,平台的移动用来扩展机械 手的工作空间,使机械手能以更合适的姿态执行任务。 • 车体的可移动性大大增加了机器人工作空间,并且能使机械手臂更好的定 位来高效地完成任务,因此其应用范围要比关节式机器人大得多。
a R
L
16
第16页/共28页
小轮支架的设计
• 小轮支架利用铣床加工,共36个,利用一块钢板做
基板,利用螺栓将支架固定在大轮板上。
R
Φ
h
d
a
b
• 加上小轮支架及其它h 附件后,安装完成的小轮结构
如图所示
17
L
第17页/共28页
大轮传动系统的设计
• 大轮传动系统采用采用链盘加链条驱动的形式。 • 采用桁架结构传递转矩的形式,将大链盘上得到的转矩传递到大轮毂上 。
式中,F为各个电机的转速; v为小车目标速度; φ 为小车目标前进方向角度( º)。
23
第23页/共28页
运动学分析——直线运动
• 下图表示φ值变化时,各个电动机对合成运动的贡献率。
贡献率/%
100
50
0 0
-50
-100
各电机对合成运动的贡献率(α角方向)
90
180
270
24
第24页/共28页
φ
4
工业机器人技术基础9.5搬运机器人-课件
IRB7600 6轴 串联
FlexPicker高速并联机器人
IRB660 4轴 串联
码垛机器人国内外研究现状
码垛机器人国内外研究现状
MC350
MC07
码垛机器人国内外研究现状
KR700PA
KR1000 1300PA
码垛机器人国内外研究现状
总结
• 掌握搬运机器人的定义与分类 • 掌握了解搬运机器人的发展现状 • 掌握世界先进码垛搬运机器人的 品牌与主要产品
高温环境搬运
低温环境搬运
搬 运 机 器 人
超洁净环境搬运
有毒气体环境搬运
搬运机器人的发展趋势
机械结构向模块化、 可重构化发 控制系统向基于PC的开放型控制器方向发展 多传感器融合配置技术 数字伺服驱动技术 视觉技术 网络化技术
搬运机器人的分类
按照联接方式分类 串联机器人 、并联机器人 按照轴数分类 四轴机器人、六轴机器人
工业机器人的典型应用 -搬运机器人
主要内容
• 掌握搬运机器人的定义与分类 • 了解搬运机器人的发展现状 • 了解世界先进码垛搬运机器人的 品牌与主要产品
搬运机器人简介
药品码垛
化肥码垛
啤酒码垛
搬 运 机 器 人
饮料码垛
牛奶码垛
建材码垛
显示屏搬运
工件搬运
搬 运 机 器 人太阳能电池 Nhomakorabea搬运显像管安装
AGV介绍ppt课件

2.AGV的主要导引方式介绍
直接坐标导引 激光导引
电磁导引 惯性导引
磁带导引
光学导引
视觉导引
GPS导引
惯性导引
激光导引
Page 9
电磁导引
磁带导引
磁带导引
自然导引
电磁导引
• 电磁导引是较为传统的导引方式之一, 目前仍被许多系统采用,它是在AGV的 行驶路径上埋设金属线,并在金属线加 载导引频率,通过对导引频率的识别来 实现AGV的导引。
Page 28
Page 29
在无人运输车(AGV)头部 下方安装一个RFID读卡器,与 AGV控制系统对接,然后在轨道 节点处安装一个电子标签,并赋 予每个节点上的电子标签一个ID 号和定义,比如节点A处代表 AGV要拐弯,用ID号00001表示, 一旦运输车在经过A处时,RFID 读卡系统会读取A处的电子标签 ID号,并根据ID号的特定指令做 出相对应的拐弯动作,从而实现 AGV调度系统功能、站点定位功 能。如图:
Page 24
麦克纳姆轮运动
Page 25
三、AGV的系统
• 1.AGV的车载控制系统
①磁导航AGV控制系统 磁导航AGV控制系统原理:车载控制系统通过对磁导 航传感器、RFID地标传感器、漫反射式红外检测传 感器、碰撞胶条、面板控制按钮等信号的采集,经过 编写好的算法程序计算处理,控制驱动单元、装卸机 构、显示屏等执行机构,实现AGV的导航控制、导引 控制、装卸控制。
• 麦克纳姆轮是瑞典麦克纳姆公司的专利。这种全方位移动方式是基于一个有许 多位于机轮周边的轮轴的中心轮的原理上,这些成角度的周边轮轴把一部分的 机轮转向力转化到一个机轮法向力上面。
Page 23
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Application Field
SHENZHEN MIRCOLOMAY TECHNOLOGY CO.,LTD
Basic Introduction on AGV
AGV: Automated Guided Vehicle .Currently the most common applications are: AGV carrying robots or AGV car, which concentrated mainly on applying to automatic logistics moving transhipment,.AGV moving robot is automatically operated by the special landmark navigation items which will transport to the designated place, the most common way of guidance are magnetic stripe guidance, laser guidance; At present the most advanced extensibility is strongest by Mick force to the development of science and technology of uhf RFID guide.
SHENZHEN MIRCOLOMAY TECHNOLOGY CO.,LTD
Leading Method of AGV
1、Magnetic Senseing Navigation:Led by magnetic stripe navigation,through clicking magnetic stripe to the ground.There is magnetic senseing behind AGV,when it passes,it can sense the magnetic stripe in order to finish automatic goods-carrying.
SHENZHEN MIRCOLOMAY TECHNOLOGY CO.,LTD
The Main Types of AGV
Kanpsack type Latent Type
Elevation type Traction Type
Drum Type Car Type Forklift type
AGV Transfer Robot
SHENZHEN MIRCOLOMAY TECHNOLOGY CO.,LTD
The Main Features of AGV
1、It's automatic-moving transfer robot,take no fixed position,easy to change its location.
AGV Transfer Robot
Mircolomay
SHENZHEN MIRCOLOMAY TECHNOLOGY CO.,LTD
Catalogue:
Basic Introduction
Leading Way
Main Features
AGV Transfer robot
Main Types Advantages
2、laser Sensing Navigation:Set reveral desitinations within a proper range for AGV through laser sensing identification device to make it move.
3、RFID Sensing Navigation:Leading AGV by means of RFID label and recognizing device to testify the location.Stations can be difined anywhere,even the most complEN MIRCOLOMAY TECHNOLOGY CO.,LTD
Advantages of AGV
1、High Automation——Controlled by computer,electrnic deveice,magnetic sensor,laser reflective sensor. 2、Charging Automation——Sendiing request atmatically when it's running out battery. 3、Elegant Appearance——Improve appearance ,thus improve company's image. 4、Security——Specific route,improves the security. 5、Low Costs——Short-time investment,long-time payment for human labor. 6、Easy to maintenance——Infrared sensor ,mechanical bump-avoidance 7、Predictability——Automatic pull over when predicting the obstacles ahead 8、Lower Damage——lower damage cause by worker's non-standard operation 9、Improve logistics management——Intelligent control 10、Small occupation——Narrow pathway 11、Flexibility——Change sceduled way in a large extent 12、Dependability——Optmize its function 13、Industrial Process——Boundary to connect ther deveices 14、Long-distance Transfer——Suitable for long-distance transfer AGV 15、Special Working Environment——Work without human's involvement
2、Connect to local Area Network and management system,best choice for unmanned factory,automated warehouse and logistics automation.
3、It is widely used in all types of factories,carrying goods and materials,assembly and leading,transfering function and taking place of human labor. it touches many fields as follow:automobile,mechanic manufacture,electronics,textile,papermaking.cigerattes,food,pringting and book publishing.