单片机闪烁灯程序
单片机闪烁灯跑马灯控制课程设计
单片机闪烁灯跑马灯控制课程设计单片机闪烁灯跑马灯控制课程设计报告一、引言本课程设计旨在通过学习和实践单片机(MCU)编程,实现闪烁灯和跑马灯的控制。
我们将使用嵌入式C语言编程,通过了解单片机的内部结构、电路设计和编程流程,深入理解单片机的工作原理和应用。
二、系统硬件设计本课程设计选用51单片机作为主控芯片,外接8个LED灯和1个按键。
硬件电路设计如下:1.单片机:采用AT89C51,该芯片具有32K字节的Flash存储器,256字节的RAM,以及两个16位定时器/计数器。
2.LED灯:采用普通LED灯珠,与单片机引脚相连,通过编程控制LED灯的亮灭状态。
3.按键:采用机械按键,与单片机的外部中断0(EX0)相连,用于触发闪烁灯和跑马灯的切换。
三、系统软件设计1.闪烁灯模式:在此模式下,8个LED灯将按照一定的频率交替闪烁。
我们可以通过计时器和GPIO口控制LED灯的亮灭状态。
void blink_LED(void) {int i;while(1) {for(i = 0; i < 8; i++) {P1_0 = ~P1_0; // 翻转LED状态delay(500); // 延时,控制闪烁频率}}}2.跑马灯模式:在此模式下,8个LED灯将按照一定的顺序依次点亮。
我们可以通过计时器和GPIO口控制LED灯的亮灭状态。
void marquee_LED(void) {int i;int led_state[8] = {0, 1, 0, 1, 0, 1, 0, 1}; // LED状态数组,初始为交替亮灭while(1) {for(i = 0; i < 8; i++) {P1_0 = led_state[i]; // 设置LED状态delay(50); // 延时,控制跑马灯速度}}}四、按键处理程序我们通过外部中断0(EX0)接收按键信号,当按键按下时,将切换闪烁灯和跑马灯模式。
按键处理程序如下:void EX0_ISR(void) interrupt 0 { // EX0中断服务程序if (key_flag) { // 如果按键已经被按下过if (key_value == 0) { // 如果按键状态为低电平marquee_LED(); // 切换到跑马灯模式key_flag = 0; // 标记按键状态已经改变} else { // 如果按键状态为高电平blink_LED(); // 切换到闪烁灯模式key_flag = 0; // 标记按键状态已经改变}key_value = ~key_value; // 翻转按键状态值} else { // 如果按键还没有被按下过key_value = ~key_value; // 翻转按键状态值if (key_value == 0) { // 如果按键状态为低电平blink_LED(); // 切换到闪烁灯模式key_flag = 1; // 标记按键状态已经改变} else { // 如果按键状态为高电平marquee_LED(); // 切换到跑马灯模式key_flag = 1; // 标记按键状态已经改变}}}。
单片机8个led灯循环点亮程序

单片机8个led灯循环点亮程序一、前言单片机是一种非常重要的电子元件,它可以通过编程来实现各种功能。
其中,点亮LED灯是最基础的操作之一。
本文将介绍如何使用单片机8个LED灯循环点亮。
二、硬件准备1. 单片机:STC89C52RC或其他8051系列单片机;2. LED灯:8个;3. 电阻:8个(220欧姆);4. 面包板:1个;5. 杜邦线:若干。
三、程序设计首先,我们需要了解一些基本的概念和知识:1. 端口:单片机的I/O口被称为端口,其中P0、P1、P2、P3四个端口分别对应着不同的引脚。
2. 输出:通过控制端口输出高电平或低电平来控制外部设备。
3. 延时函数:为了让程序在执行时停留一段时间,需要使用延时函数。
接下来,我们开始编写程序。
具体步骤如下:1. 定义引脚首先,我们需要定义每个LED所对应的引脚。
这里我们将8个LED分别连接到P0口的0~7引脚上。
sbit led0=P0^0;sbit led1=P0^1;sbit led2=P0^2;sbit led3=P0^3;sbit led4=P0^4;sbit led5=P0^5;sbit led6=P0^6;sbit led7=P0^7;2. 定义延时函数为了让程序在执行时停留一段时间,我们需要定义一个延时函数。
这里我们使用循环来实现延时。
void delay(unsigned int i){while(i--);}3. 循环点亮LED灯接下来,我们就可以开始循环点亮LED灯了。
这里我们使用for循环来实现。
void main(){while(1){for(int i=0;i<8;i++){switch(i){case 0:led0=1;break;case 1:led1=1;break;case 2:led2=1;break;case 3:led3=1;break;case 4:led4=1;break;case 5:led5=1;break;case 6:led6=1;break;case 7:led7=1;break;}delay(50000);switch(i){case 0:led0=0;break;case 1:led1=0;break;case 2:led2=0;break;case 3:led3=0;break;case 4:led4=0;break;case 5:led5=0;break;case 6:led6=0;break;case 7:led7=0;break;}}}}四、总结通过以上步骤,我们就可以实现单片机8个LED灯循环点亮的程序了。
单片机实验报告—— LED灯闪烁

XXXX学院实验报告Experimentation Report of Taiyuan Normal University系部计算机年级大三课程单片机原理与接口技术姓名同组者日期2019.10.31 学号项目 LED闪烁一、实验目的1、了解单片机顺序执行的特点;2、掌握51单片机开发板所需软件的安装过程;3、以LED灯闪烁为例子,掌握C语言的编写和keilc51的使用;二、实验仪器硬件资源:单片机开发板笔记本电脑;软件资源:软件 Keil uVision5、USB驱动程序;三、实验原理1、流程图2、连接图四、实验结果点击运行按钮,LED灯先全部熄灭,隔一段时间,LED灯亮,再隔一段时间,LED灯全部熄灭,LED灯亮灭循环,直到点击复位按钮才结束。
五、实验代码及分析#include <reg51.h> //此文件中定义了51的一些特殊功能寄存器//--定义全局函数--//void Delay10ms(unsigned int c); //延时10ms* 函数名 : main* 函数功能 : 主函数* 输入 : 无* 输出 : 无void main(){while(1){//--数字前面加0x表示该数是十六进制的数,0x00就是十六进制的00--////--P0口一共有8个IO口,即从P0.0到P0.7,而0x00二进制就是0000 0000--////--效果就是P0.0到P2.7都是0,即低电平。
而如果你想给P0.1口赋高电平时--////--二进制就是0000 0001,就是十六进制0x01.--//P0 = 0x00; //置P0口为低电平,LED灯先熄灭Delay10ms(50); //调用延时程序,修改括号里面的值可以调整延时时间P0 = 0xff; //置P0口为高电平,LED灯亮Delay10ms(50); // 调用延时程序}}* 函数名 : Delay10ms* 函数功能 : 延时函数,延时10ms* 输入 : 无* 输出 : 无void Delay10ms(unsigned int c) //误差 0us{unsigned char a, b//--c已经在传递过来的时候已经赋值了,所以在for语句第一句就不用赋值了--//for (;c>0;c--){for (b=38;b>0;b--){for (a=130;a>0;a--);}}}六、心得体会通过此次试验我了解单片机顺序执行的特点,掌握51单片机开发板所需软件的安装过程,通过LED灯闪烁这个例程,我初步了解了Keilc51使用。
单片机八个灯依次亮的编程汇编语言

单片机八个灯依次亮的编程汇编语言哎呀,这可是个不简单的活儿啊!单片机八个灯依次亮,听起来就像是在玩连连看,可是可不是那么简单的事情哦!不过别着急,我来给你讲讲怎么搞定这个“连连看”吧!我们得了解一下单片机的基本知识。
单片机就像一个小电脑,里面有好多好多的芯片,可以完成各种各样的任务。
这次我们要让单片机控制八个灯依次亮起来,就像是在跳一个八步舞一样,一步一步地来。
第一步,我们得给这八个灯分别取个名字。
比如说,第一个灯叫做“小明”,第二个叫做“小红”,以此类推。
这样一来,我们就可以用名字来代替它们了,方便我们进行编程。
第二步,我们得告诉单片机该怎么做。
这就需要用到编程语言了。
编程语言就像是我们跟单片机沟通的工具,它告诉单片机:“小明先亮一下,然后是小红,再是小刚......”这样一来,单片机就知道该按照什么顺序来控制灯了。
第三步,我们得把这个程序写到单片机里。
这可不是一件容易的事情,需要我们仔细地思考每一个步骤,确保没有漏洞。
写完之后,我们还得把程序烧录到单片机的芯片里,让它变成真正的“活”程序。
第四步,我们得测试一下这个程序是否正常工作。
这就像是在排练一场舞蹈一样,我们需要不断地调整步伐和节奏,直到完美无缺。
如果发现有什么问题,我们就得赶紧修改程序,让它重新开始跳舞。
终于到了最后一步——让我们看看这个八步舞到底有多精彩吧!当所有的灯都亮起来的时候,你会感觉就像是看到了一场绚丽多彩的烟花表演,让人陶醉其中。
这就是单片机控制八个灯依次亮起来的魅力所在!虽然这个任务看起来有点儿复杂,但是只要我们一步一步地来,就一定能够成功。
就像学习任何一门新技能一样,只要肯下功夫、勤奋努力,就一定能够取得好成绩!加油吧!。
单片机测控之霓虹灯程序

ORG 0000HMAIN: MOV SP, #60HMOV R1,#8START: JB P3.2,$ ;检测P3.2口所接的按键是否被按下LCALL DEL05S ;按键消抖JB P3.2,START ;再次检测L: MOV A,#0FEH ;赋初值,使P1口所接的灯流水点亮L0: MOV P1,AACALL DEL_1SRL A ;对A中的值左移,改变其中的值DJNZ R1,L0MOV P1,#0FFH ;将P1口的所有灯都熄灭ACALL DEL_1SMOV A,#0FEH ;赋初值,使P2口所接的灯流水点亮MOV R1,#8L1: MOV P2,AACALL DEL_1SRL A ; 对A中的值左移,改变其中的值DJNZ R1,L1MOV P1,#00H ;将16盏灯都点亮MOV P2,#00HACALL DEL_1SMOV P1,#0FFH ;将16盏灯都熄灭MOV P2,#0FFHACALL DEL_1SMOV R1,#8MOV A,#07FH ;赋初值,使P2口所接的灯反向流水点亮L2: MOV P2,AACALL DEL_1SRR A ;对A中的值右移,改变其中的值DJNZ R1,L2MOV P2,#0FFH ;将P2口的所有灯都熄灭MOV R1,#8MOV A,#07FH ; 赋初值,使P1口所接的灯反向流水点亮ACALL DEL_1SL3: MOV P1,AACALL DEL_1SRR A ;对A中的值右移,改变其中的值DJNZ R1,L3MOV P1,#00H ;将16盏灯全部都点亮MOV P2,#00HACALL DEL_1SMOV P1,#0FFH ;然后将所有的灯都熄灭MOV P2,#0FFHACALL DEL_1SMOV R1,#8MOV A,#0FEH ;赋初值,使16盏灯中的两盏被点亮L4: MOV P1,AMOV P2,AACALL DEL_1SRL A ;P1、P2口各点亮一盏灯,之后流水点亮DJNZ R1,L4MOV P1,#0FFH ;所有等都被熄灭MOV P2,#0FFHACALL DEL_1SMOV R1,#8 ;与L4中的程序一致,只是反向被流水点亮MOV A,07FHL5: MOV P1,AMOV P2,AACALL DEL_1SRR ADJNZ R1,L5MOV P1,#00H ;将所有的灯都点亮MOV P2,#00HACALL DEL_1SMOV P1,#0FFH ;将所有的灯都熄灭MOV P2,#0FFHACALL DEL_1SMOV R1,#5 ;设置循环次数L6: MOV A,#55H ;将16盏灯间隔点亮8盏MOV P1,AMOV A,#0AAHMOV P2,AACALL DEL_1SMOV A,#0AAHMOV P1,AMOV A,#55H ;将16盏灯中另外8盏灯间隔点亮MOV P2,AACALL DEL_1SMOV A,#0FFH ;将所有的灯都熄灭MOV P1,AMOV P2,AACALL DEL_1SMOV A,#00H ;将所有的灯都点亮MOV P1,AMOV P2,AACALL DEL_1SDJNZ R1,L6MOV A,#0FFH ;将所有的灯再都熄灭MOV P1,AMOV P2,AACALL DEL_2SMOV R1,#5 ;设置总的循环次数L7: MOV A,#0F0H ;将P1口的8盏灯4盏连续的点亮,再点亮另外4盏MOV R2,#2 ;设置循环次数L8: MOV P1,AACALL DEL_1SSWAP ADJNZ R2,L8MOV R2,#2 ;设置循环次数MOV A,#0F0H ;将P1口的8盏灯4盏连续的点亮,再点亮另外4盏L9: MOV P2,AACALL DEL_1SSWAP ADJNZ R2,L9DJNZ R1,L7MOV P1,#00H ; 将所有的灯都点亮MOV P2,#00HACALL DEL_1SMOV P1,#0FFH ;将所有的灯再都熄灭MOV P2,#0FFHACALL DEL_1SMOV R1,#10 ; 设置循环次数MOV A,#33H ; 16盏中点亮8盏,两盏连一起,循环点亮L10: MOV P1,AMOV P2,AACALL DEL_1SRL ADJNZ R1,L10MOV A,#0FFH ;将所有的灯再都熄灭MOV P1,AMOV P2,AACALL DEL_1SLRJ: M OV A,#0FFH ;先将所有的灯都熄灭MOV R1,#00HNH: MOV P1,AMOV P2,AMOV A,R1MOV DPTR,#TAB ;将所有的灯一盏一盏依次点亮MOVC A,@A+DPTRMOV P1,AACALL DEL05SINC R1CJNE R1,#10H,NHLJMP MAINTAB: DB 0FEH,0FCH,0F8H,0F0H,0E0H,0C0H,80H,00H DB 7FH,3FH,1FH,0FH,07H,03H,01H,00HLJMP LMOV A,#0F0HDEL_1S: MOV R5,#10 ;1秒的延时程序DE1: MOV R6,#200DE2: MOV R7,#248DE3: DJNZ R7,DE3DJNZ R6,DE2DJNZ R5,DE1RETDEL_2S: MOV R5,#20 ;2秒的延时程序DE4: MOV R6,#200DE5: MOV R7,#248DE6: DJNZ R7,DE6DJNZ R6,DE5DJNZ R5,DE4RETDEL05S: MOV TMOD,#10H ;0.5秒的延时程序MOV TH1,#0BHMOV TL1,#0DCHMOV R2,#4SETB TR1LOOP: JNB TF1,$MOV TH1,#0BHMOV TL1,#0DCHCLR TF1 DJNZ R2,LOOP CLR TR1 RETEND。
51单片机控制LED灯程序设计
51单片机:LED灯亮灯灭程序设计1.功能说明:控制单片机P1端口输出,使P1.0位所接的LED点亮,其他7只灯熄灭。
程序:01: MOV A , #11111110B ; 存入欲显示灯的位置数据02: MOV P1, A ; 点亮第一只灯03: JMP $ ; 保持当前的输出状态04: END ; 程序结束2.功能说明:单片机P1端口接8只LED,点亮第1、3、4、6、7、8只灯。
程序:01:START: MOV A , #00010010B ; 存入欲显示灯的位置数据02: MOV P1, A ; 点亮灯03: JMP START ; 重新设定显示值04: END ; 程序结束3.功能说明:单片机P1端口接8只LED,每次点亮一只,向左移动点亮,重复循环。
程序:01: START: MOV R0, #8 ;设左移8次02: MOV A, #11111110B ;存入开始点亮灯位置03: LOOP: MOV P1, A ;传送到P1并输出04: RL A ;左移一位05: DJNZ R0, LOOP ;判断移动次数06: JMP START ;重新设定显示值07: END ;程序结束4.功能说明:单片机P1端口接8只LED,每次点亮一只,向右移动点亮,重复循环。
程序:01: START: MOV R0, #8 ;设右移8次02: MOV A, #01111111B ;存入开始点亮灯位置03: LOOP: MOV P1, A ;传送到P1并输出04: ACALL DELAY ;调延时子程序05: RR A ;右移一位06: DJNZ R0, LOOP ;判断移动次数07: JMP START ;重新设定显示值08: DELAY: MOV R5,#50 ;09: DLY1: MOV R6,#100 ;10: DLY2: MOV R7,#100 ;11: DJNZ R7,$ ;12: DJNZ R6,DLY2 ;13: DJNZ R5,DLY1 ;14: RET ;子程序返回15: END ;程序结束5.功能说明:单片机P1端口接8只LED,每次点亮一只,先把右边的第一只点亮,0.5秒后点亮右数的第二只灯,第一只熄灭,再过0.5秒点亮右数的第三只灯,第二只熄灭,…亮灯按此顺序由右向左移动。
基于51单片机的C语言流水灯程序

基于51单片机的C语言流水灯程序#include //51系列单片机定义文件#define uchar unsigned char //定义无符号字符#define uint unsigned int //定义无符号整数void delay(uint); //声明延时函数void main(){uint i;uchar temp;while(1){temp=0x01;for(i=0;i<8;i++) //8个流水灯逐个闪动{P2=~temp;delay(500); //调用延时函数temp<<=1;}temp=0x80;for(i=0;i<8;i++) //8个流水灯反向逐个闪动{P2=~temp;delay(500); //调用延时函数temp>>=1;}temp=0xFE;for(i=0;i<8;i++) //8个流水灯依次全部点亮{P2=temp;delay(500); //调用延时函数temp<<=1;}temp=0x7F;for(i=0;i<8;i++) //8个流水灯依次反向全部点亮{P2=temp;delay(500); //调用延时函数temp>>=1;}}}void delay(uint a) //延时函数,毫秒级别{uint i;while(--a!=0) //执行空操作循环,其中a为形参,由调用该函数的函数语句提供值{for(i=0;i<125;i++);//执行当0加到125时,大约会用掉1ms 的时间}}。
proteus控制led灯闪烁的简单电路及程序

proteus控制led灯闪烁的简单电路及程序LED灯作为电子元件中广泛应用的一种,通过闪烁可以提供一种视觉提示。
在这篇文章中,我们将介绍如何使用Proteus软件设计一个简单的电路,并编写程序控制LED灯的闪烁效果。
本文将分为以下几个部分展开讨论。
1. 硬件设计在Proteus软件中,我们首先需要设计电路图。
请先插入一个微处理器芯片,例如Arduino UNO,然后将LED灯连接到芯片的一个数字引脚上。
确保LED的正极连接到数字引脚,负极连接到芯片的地线上。
为了实现闪烁效果,可以连接一个电阻到LED的负极,然后将另一端连接到芯片的VCC引脚。
2. 软件编程在设计了硬件电路后,我们需要编写控制LED闪烁的程序。
在Proteus软件中,可以使用Arduino IDE来完成这一任务。
以下是一个简单的C代码示例:```cvoid setup() {pinMode(2, OUTPUT); // 选择使用的数字引脚}void loop() {digitalWrite(2, HIGH); // LED灯亮起delay(1000); // 延时1秒digitalWrite(2, LOW); // LED灯熄灭delay(1000); // 延时1秒}```代码中的`setup`函数用于设置程序运行时的初始状态,其中`pinMode`函数用于配置数字引脚为输出模式。
`loop`函数则是程序的主要循环,其中`digitalWrite`函数用于控制LED灯的亮灭状态,`delay`函数用于给LED保持亮灭状态的时间间隔。
3. 仿真验证完成软件编程后,我们需要在Proteus中进行电路仿真验证。
打开Proteus软件,将设计好的电路图和编写好的程序导入到仿真环境中。
然后点击开始仿真按钮,程序将开始运行,并控制LED灯按照设定的时间间隔闪烁。
通过仿真验证,我们可以判断程序的逻辑是否正确,同时可以观察LED灯的正常工作情况。
单片机c语言闪烁灯程序

1. 闪烁灯1. 实验任务如图4、1、1 所示:在P1、0 端口上接一个发光二极管L1,使L1 在不停地一亮灭,一亮一灭的时间间隔为0、2 秒。
2. 电路原理图图4、1、13. 系统板上硬件连线把“单片机系统”区域中的P1、0 端口用导线连接到“八路发光二极管指示块”区域中的L1 端口上。
4. 程序设计内容(1). 延时程序的设计方法作为单片机的指令的执行的时间就是很短,数量大微秒级,因此,我们要求的闪烁时间间隔为0、2 秒,相对于微秒来说,相差太大,所以我们在执行某一指令时,插入延时程序,来达到我们的要求,但这样的延时程序就是如何设计呢?下面具体介绍其原理:2如图4、1、1 所示的石英晶体为12MHz,因此,1 个机器周期为1 微秒机器周期微秒MOV R6,#20 2 个机器周期2D1: MOV R7,#248 2 个机器周期2 2+2×248=498 20×DJNZ R7,$ 2 个机器周期2×248 498DJNZ R6,D1 2 个机器周期2×20=4010002因此,上面的延时程序时间为10、002ms。
由以上可知,当R6=10、R7=248 时,延时5ms,R6=20、R7=248 时,延时10ms,以此为基本的计时单位。
如本实验要求0、2 秒=200ms,10ms×R5=200ms,则R5=20,延时子程序如下:DELAY: MOV R5,#20D1: MOV R6,#20D2: MOV R7,#248DJNZ R7,$DJNZ R6,D2DJNZ R5,D1RET(2). 输出控制如图1 所示,当P1、0 端口输出高电平,即P1、0=1 时,根据发光二极管的单向导电性可知,这时发光二极管L1 熄灭;当P1、0 端口输出低电平,即P1、0=0 时,发光二极管L1 亮;我们可以使用SETB P1、0 指令使P1、0 端口输出高电平,使用CLR P1、0 指令使P1、0 端口输出低电平。
单片机红绿灯的汇编语言程序设计

单片机红绿灯的汇编语言程序设计a>程序源代码ORG 0000H ;主程序的入口地址LJMP MAIN ;跳转到主程序的开始处ORG 0003H ;外部中断0的中断程序入口地址ORG 000BH ;定时器0的中断程序入口地址LJMP T0_INT ;跳转到中断服务程序处ORG 0013H ;外部中断1的中断程序入口地址MAIN : MOV SP,#50HMOV IE,#8EH ;CPU开中断,允许T0中断,T1中断和外部中断1中断MOV TMOD,#51H ;设置T1为计数方式,T0为定时方式,且都工作于模式1MOV TH1,#00H ;T1计数器清零MOV TL1,#00HSETB TR1 ;启动T1计时器SETB EX1 ;允许INT1中断SETB IT1 ;选择边沿触发方式MOV DPTR ,#0003HMOV A, #80H ;给8255赋初值,8255工作于方式0MOVX @DPTR, AAGAIN: JB P3.1,N0 ;判断是否要设定东西方向红绿灯时间的初值,若P3.1为1 则跳转MOV A,P1JB P1.7,RED ;判断P1.7是否为1,若为1则设定红灯时间,否则设定绿灯时间MOV R0,#00H ;R0清零MOV R0,A ;存入东西方向绿灯初始时间MOV R3,ALCALL DISP1LCALL DELAYAJMP AGAINRED: MOV A,P1ANL A,#7FH 1.7置0MOV R7,#00H ;R7清零MOV R7,A ;存入东西方向红灯初始时间MOV R3,ALCALL DISP1LCALL DELAYAJMP AGAIN;-------------------------------------------N0: SETB TR0 ;启动T0计时器MOV 76H,R7 ;红灯时间存入76HN00: MOV A,76H ;东西方向禁止,南北方向通行MOV R3,AMOV DPTR,#0000H ;置8255A口,东西方向红灯亮,南北方向绿灯亮MOV A,#0DDHMOVX @DPTR, AN01: JB P2.0,B0N02: SETB P3.0CJNE R3,#00H,N01 ;比较R3中的值是否为0,不为0转到当前指令处执行;------黄灯闪烁5秒程序------N1: SETB P3.0MOV R3,#05HMOV DPTR,#0000H ;置8255A口,东西,南北方向黄灯亮MOV A,#0D4HMOVX @DPTR,AN11: MOV R4,#00HN12: CJNE R4,#7DH,$ ;黄灯持续亮0.5秒N13: MOV DPTR,#0000H ; 置8255A口,南北方向黄灯灭MOV A,#0DDHMOVX @DPTR,AN14: MOV R4,#00HCJNE R4,#7DH,$ ;黄灯持续灭0.5秒CJNE R3,#00H,N1 ;闪烁时间达5秒则退出;------------------------------------------------------------N2: MOV R7,#00HMOV A,R0 ;东西通行,南北禁止MOV R3,AMOV DPTR,#0000H ; 置8255A口,东西方向绿灯亮,南北方向红灯亮MOV A,#0EBHMOVX @DPTR,AN21: JB P2.0,T03N22: CJNE R3,#00H,N21;------黄灯闪烁5秒程序------N3: MOV R3,#05HMOV DPTR,#0000H ;置8255A口,东西,南北方向黄灯亮MOV A,#0E2HMOVX @DPTR,AN31: MOV R4,#00HCJNE R4,#7DH,$ ;黄灯持续亮0.5秒N32: MOV DPTR,#0000H ; 置8255A口,南北方向黄灯灭MOV A,#0EBHMOVX @DPTR,AN33: MOV R4,#00HCJNE R4,#7DH,$ ;黄灯持续灭0.5秒CJNE R3,#00H,N3 ;闪烁时间达5秒则退出SJMP N00;------闯红灯报警程序------B0: MOV R2,#03H ;报警持续时间3秒B01: MOV A,R3JZ N1 ;若倒计时完毕,不再报警CLR P3.0 ;报警CJNE R2,#00H,B01 ;判断3秒是否结束SJMP N02;------1秒延时子程序-------N7: RETIT0_INT:MOV TL0,#9AH ;给定时器T0送定时10ms的初值MOV TH0,#0F1HINC R4INC R5CJNE R5,#0FAH,T01 ;判断延时是否够一秒,不够则调用显示子程序MOV R5,#00H ;R5清零DEC R3 ;倒计时初值减一DEC R2 ;报警初值减一T01: ACALL DISP ;调用显示子程序RETI ;中断返回;------显示子程序------DISP: JNB P2.4,T02DISP1: MOV B,#0AHMOV A,R3 ;R3中值二转十显示转换DIV ABMOV 79H,AMOV 7AH,BDIS: MOV A,79H ;显示十位MOV DPTR,#TABMOVC A,@A+DPTRMOV DPTR,#0002HMOVX @DPTR,AMOV DPTR,#0001HMOV A,#0F7HMOVX @DPTR,ALCALL DELAYDS2: MOV A,7AH ;显示个位MOV DPTR,#TABMOVC A,@A+DPTRMOV DPTR,#0002HMOVX @DPTR,AMOV DPTR,#0001HMOV A,#0FBHMOVX @DPTR,ARET;------东西方向车流量检测程序------T03: MOV A,R3SUBB A,#00H ;若绿灯倒计时完毕,不再检测车流量JZ N3JB P2.0,T03INC R7CJNE R7,#64H,E1MOV R7,#00H ;中断到100次则清零E1: SJMP N22;------东西方向车流量显示程序------T02: MOV B,#0AHMOV A,R7 ;R7中值二转十显示转换DIV ABMOV 79H,AMOV 7AH,BDIS3: MOV A,79H ;显示十位MOV DPTR,#TABMOVC A,@A+DPTRMOV DPTR,#0002HMOVX @DPTR,AMOV DPTR,#0001HMOV A,#0F7HMOVX @DPTR,ALCALL DELAYDS4: MOV A,7AH ;显示个位MOV DPTR,#TABMOVC A,@A+DPTRMOV DPTR,#0002HMOVX @DPTR,AMOV DPTR,#0001HMOV A,#0FBHMOVX @DPTR,ALJMP N7;------延时4MS子程序----------DELAY: MOV R1,#0AHLOOP: MOV R6,#64HNOPLOOP1: DJNZ R6,LOOP1DJNZ R1,LOOPRET;------字符表------TAB: DB 3FH,06H,5BH,4FH,66H,6DH,7DH,07H,7FH,6FH ENDORG 0000HAJMP MAINORG 000BHLJMP INTORG 0030HMAIN:MOV R2,#20H MOV TMOD,#01H MOV TL0,#0B0H MOV TH0,#80H SETB EASETB ET0SETB TR0LOOP:MOV A,#01H MOV P1,ALCALL DELMOV R0,#02H LCALL FPLOOP1:MOV A,#02H MOV P1,ALCALL DELMOV R0,#02H LCALL FPLOOP2:MOV A, #04H MOV P1,ALCALL DELMOV R0,#05H LCALL FPMOV P1,#00H LCALL DELCJNE R0,#00H ,AASJMP LOOPFP:MOV R1,#80H MOV A,R1MOV DPTR,#3FFFH MOVX @DPTR,A RR AMOV A,R0ANL A,#0FHMOV DPTR,#TAB MOVC A,@A+DPTR MOV DPTR,#5FFFH MOVX @DPTR,A LCALL DELMOV A,#0FFHMOV DPTR,#5FFFH MOVX @DPTR,AMOV A,R1MOV DPTR,#3FFFH MOVX @DPTR,AMOV A,R0ANL A,#0F0HSWAP AMOV DPTR,#TAB MOVC A,@A+DPTR MOV DPTR,#5FFFH MOVX @DPTR,A LCALL DELMOV A,#0FFHMOV DPTR,#5FFFH MOVX @DPTR,ACJNE R0,#99H,FPRETDEL:MOV R5,#100H DEL0:MOV R6,#250H DEL1JNZ R6,DEL1 DJNZ R5,DEL0RETINT: CLR ET0DJNZ R2,GOONMOV A,R0ADD A,#99HDA AMOV R0,AMOV R2,#20HGOON:MOV TMOD,#01H MOV TL0,#0B0HMOV TH0,#80HSETB EASETB ET0RETITAB: DB 0C0H,0F9H,0A4H,0B0H,99H,92H,82H,0F8H,80H,90H END。
单片机控制LED灯点亮(C语言)

将0xfe赋给P1口,然后使用移位函数来改变P1口的值,达到流水灯的效果 移位函数: _crol_,_cror_:将char型变量循环向左(右)移动指定位数后返回 。 _crol_,_cror_: c51中的intrins.h库函数
程序如下:
随后会弹出一个对话框,要求选择单片机的型号。在该对话框中显示了Vision2的器件数据库,从中可以根据使用的单片机来选择。
PART ONE
AT89S52
8051 based Full Static CMOS controller with Three-Level Program Memory Lock, 32 I/O lines, 3 Timers/Counters, 8 Interrupts Sources, Watchdog Timer, 2 DPTRs(DATA POINTER REGISTERS ), 8K Flash Memory, 256 Bytes On-chip RAM 基于8051全静态CMOS控制器、 三级加密程序存储器 、 32个I/O口 、三个定时器/计数器 、八个中断源 、看门狗定时器、2 个数据指针 寄存器、8k字节Flash,256字节片内RAM
十六进制整常数
十六进制整常数的前缀为0X或0x。其数码取值为0~9,A~F或a~f。 以下各数是合法的十六进制整常数: 0X2A(十进制为42) 0XA0 (十进制为160) 0XFFFF (十进制为65535) 以下各数不是合法的十六进制整常数: 5A (无前缀0X) 0X3H (含有非十六进制数码)
各种进位制的对应关系
十进制
二进制
十六进制
十进制
二进制
十六进制
0
0
0
9
1001
(完整版)PROTEUS仿真100实例
(完整版)PROTEUS仿真100实例《单片机C语言程序设计实训100例—基于8051+Proteus仿真》案例第01 篇基础程序设计01 闪烁的LED/* 名称:闪烁的LED说明:LED按设定的时间间隔闪烁*/#include#define uchar unsigned char#define uint unsigned intsbit LED=P1^0;//延时void DelayMS(uint x){uchar i;while(x--){for(i=0;i<120;i++);}}//主程序void main(){while(1){LED=~LED;DelayMS(150);}}02 从左到右的流水灯/* 名称:从左到右的流水灯说明:接在P0口的8个LED从左到右循环依次点亮,产生走马灯效果*/#include#include#define uchar unsigned char#define uint unsigned int//延时void DelayMS(uint x){uchar i;while(x--){for(i=0;i<120;i++);}}//主程序void main(){P0=0xfe;while(1){P0=_crol_(P0,1); //P0的值向左循环移动DelayMS(150);}}03 8只LED左右来回点亮/* 名称:8只LED左右来回点亮说明:程序利用循环移位函数_crol_和_cror_形成来回滚动的效果*/#include#include#define uchar unsigned char#define uint unsigned int//延时void DelayMS(uint x){uchar i;while(x--){for(i=0;i<120;i++);}}//主程序void main(){uchar i;P2=0x01;while(1){for(i=0;i<7;i++){P2=_crol_(P2,1); //P2的值向左循环移动DelayMS(150);}for(i=0;i<7;i++){P2=_cror_(P2,1); //P2的值向右循环移动DelayMS(150);}}}04 花样流水灯/* 名称:花样流水灯说明:16只LED分两组按预设的多种花样变换显示*/#include#define uchar unsigned char#define uint unsigned intuchar code Pattern_P0[]={0xfc,0xf9,0xf3,0xe7,0xcf,0x9f,0x3f,0x7f,0xff,0xff,0xff,0xff,0xff,0 xff,0xff,0xff,0xe7,0xdb,0xbd,0x7e,0xbd,0xdb,0xe7,0xff,0xe7,0xc3,0x81,0x 00,0x81,0xc3,0xe7,0xff,0xaa,0x55,0x18,0xff,0xf0,0x0f,0x00,0xff,0xf8,0xf1,0xe3,0xc7,0x8f,0 x1f,0x3f,0x7f,0x7f,0x3f,0x1f,0x8f,0xc7,0xe3,0xf1,0xf8,0xff,0x00,0x00,0xff,0xf f,0x0f,0xf0,0xff,0xfe,0xfd,0xfb,0xf7,0xef,0xdf,0xbf,0x7f,0xff,0xff,0xff,0xff,0xff,0 xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0x7f,0xbf,0xdf,0xef,0xf7,0xf b,0xfd,0xfe,0xfe,0xfc,0xf8,0xf0,0xe0,0xc0,0x80,0x00,0x00,0x00,0x00,0x00 ,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x80,0xc0,0xe0,0 xf0,0xf8,0xfc,0xfe, 0x00,0xff,0x00,0xff,0x00,0xff,0x00,0xff };uchar code Pattern_P2[]={0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xfe,0xfc,0xf9,0xf3,0xe7,0xcf,0x 9f,0x3f,0xff,0xe7,0xdb,0xbd,0x7e,0xbd,0xdb,0xe7,0xff,0xe7,0xc3,0x81,0x 00,0x81,0xc3,0xe7,0xff,0xaa,0x55,0x18,0xff,0xf0,0x0f,0x00,0xff,0xf8,0xf1,0xe3,0xc7,0x8f,0 x1f,0x3f,0x7f,0x7f,0x3f,0x1f,0x8f,0xc7,0xe3,0xf1,0xf8,0xff,0x00,0x00,0xff,0xf f,0x0f,0xf0,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xfe,0xfd,0xfb,0xf7,0xef,0xd f,0xbf,0x7f,0x7f,0xbf,0xdf,0xef,0xf7,0xfb,0xfd,0xfe,0xff,0xff,0xff,0xff,0xff,0 xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xfe,0xfc,0xf8,0xf0,0xe0,0xc 0,0x80,0x00,0x00,0x80,0xc0,0xe0,0xf0,0xf8,0xfc,0xfe,0xff,0xff,0xff,0xff,0xff, 0xff,0xff,0xff,0x00,0xff,0x00,0xff,0x00,0xff,0x00,0xff};//延时void DelayMS(uint x){uchar i;while(x--){for(i=0;i<120;i++);}}//主程序void main(){uchar i;while(1){ //从数组中读取数据送至P0和P2口显示for(i=0;i<136;i++){P0=Pattern_P0[i];P2=Pattern_P2[i];DelayMS(100);}}}05 LED模拟交通灯/* 名称:LED模拟交通灯说明:东西向绿灯亮若干秒,黄灯闪烁5次后红灯亮,红灯亮后,南北向由红灯变为绿灯,若干秒后南北向黄灯闪烁5此后变红灯,东西向变绿灯,如此重复。
单片机代码例子
单片机代码例子1. LED闪烁程序在单片机中,我们可以通过编写简单的代码来实现LED灯的闪烁。
以下是一个简单的LED闪烁程序的例子:```#include <reg51.h>void main(){while(1){P1 = 0xFF; // 将P1口的所有引脚设置为高电平delay(1000); // 延时1秒P1 = 0x00; // 将P1口的所有引脚设置为低电平delay(1000); // 延时1秒}}void delay(int time){int i, j;for(i=0; i<time; i++){for(j=0; j<1275; j++);}}```2. 数码管显示程序单片机中的数码管可以通过编写代码来显示数字和字符。
以下是一个简单的数码管显示程序的例子:```#include <reg51.h>unsigned char code digit[10] = {0xC0, 0xF9, 0xA4, 0xB0, 0x99, 0x92, 0x82, 0xF8, 0x80, 0x90};void main(){unsigned int i;while(1){for(i=0; i<10; i++){P1 = digit[i]; // 将对应的数码管段码输出到P1口delay(1000); // 延时1秒}}}void delay(int time){int i, j;for(i=0; i<time; i++){for(j=0; j<1275; j++);}}```3. 温度检测程序通过连接温度传感器到单片机的引脚,我们可以编写代码来读取温度数据。
以下是一个简单的温度检测程序的例子:```#include <reg51.h>sbit DQ = P3^2; // 温度传感器引脚void delay(int time){int i, j;for(i=0; i<time; i++){for(j=0; j<1275; j++); }}unsigned char readTemperature() {unsigned char temperature; unsigned char i;DQ = 1; // 发送起始信号DQ = 0;delay(500); // 延时500us DQ = 1; // 接收温度数据delay(50); // 延时50usfor (i=0; i<8; i++){DQ = 0;temperature = temperature >> 1; DQ = 1;if (DQ){temperature |= 0x80;}delay(50); // 延时50us}return temperature;}void main(){unsigned char temperature;while(1){temperature = readTemperature(); // 在LCD上显示温度数据delay(1000); // 延时1秒}}```4. 蜂鸣器控制程序通过编写代码,我们可以控制单片机的引脚来控制蜂鸣器的发声。
C51单片机控制LED灯设计方案

C51单片机控制LED灯设计方案C51单片机是一种8位单片机,被广泛应用于嵌入式系统和各种控制设备中。
LED灯是一种常见的电子显示器件,可以通过控制单片机的输入输出口来实现各种灯光效果。
以下是一个基本的C51单片机控制LED灯的设计方案。
1.设计硬件电路首先,我们需要设计一个合适的硬件电路来连接单片机和LED灯。
一个简单的电路包括单片机、电流限制电阻和LED灯。
单片机的输出端口与LED灯正极相连,电阻连接在LED灯的负极,此电阻一般选择220欧姆以限制电流。
2.编写程序使用Keil C51开发环境编写程序,通过编程来控制单片机的输出口,从而控制LED灯的亮灭。
首先,需要包含头文件reg51.h,该头文件包含了控制单片机输入输出口的相关函数。
接着,需要定义LED灯的连接引脚。
例如,如果LED灯连接到单片机的P1.0引脚,可以使用以下命令定义:sbit LED = P1^0;在主程序中,我们可以使用循环语句来实现LED灯的不同亮灭效果。
例如,以下代码实现了一个LED灯闪烁的效果:#include <reg51.h>sbit LED = P1^0;unsigned int i, j;for(j=0;j<1275;j++);void mainwhile(1)LED=0;//亮灯delay(1000); //延时LED=1;//灭灯delay(1000); //延时}在以上代码中,LED = 0;表示将P1.0引脚输出低电平,亮起LED灯;LED = 1;表示将P1.0引脚输出高电平,灭掉LED灯。
delay函数用于延时一段时间,以控制LED灯的闪烁频率。
3.烧录程序完成程序编写后,将C51单片机与计算机通过编程器连接,并使用烧录软件将程序烧录到单片机内部存储器中。
4.运行程序烧录完成后,将单片机与电路连接,并将电路供电。
LED灯应该开始闪烁起来,效果如设计所期望。
以上是一个基本的C51单片机控制LED灯的设计方案。
Proteus实现单片机交通灯_图+程序(调试可用)
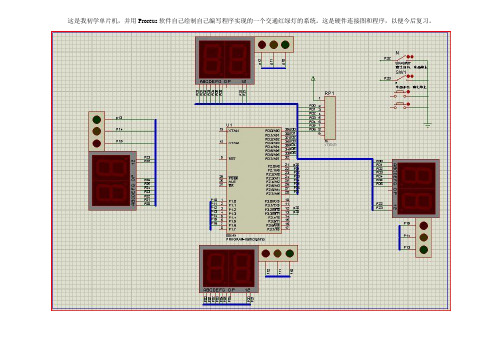
这是我初学单片机,并用Proreus软件自己绘制自己编写程序实现的一个交通红绿灯的系统。
这是硬件连接图和程序,以便今后复习。
左上右下中控制部分,上面一个开关按下时,南北方向绿灯,东西方向红灯黄灯闪烁3秒绿灯设置15秒,红灯设置18秒。
绿灯走完15秒后黄灯闪烁3秒变为红灯,红灯走完18秒后变成绿灯,以此循环。
源程序:COUNT EQU 30H ;T0中断计数SNLEDDA TA EQU 31H ;存储南北数码管显示的数据SNCOLORFLAG EQU 32H ;=1时南北绿灯亮,=2时南北黄灯亮,=3时南北红灯亮SNLEDDA TAINIT EQU 33H ;存储南北各颜色灯的初始时间EWLEDDA TA EQU 34H ;存储东西数码管显示的数据EWCOLORFLAG EQU 35H ;=1时东西红灯亮,=2时东西绿灯亮,=3时东西黄灯亮EWLEDDA TAINIT EQU 36H ;存储东西各颜色灯的初始时间org 0000hlJMP MAINorg 0003hljmp exint0ORG 000BHlJMP INTT0org 0013hljmp exint1org 0100h;主函数**************************************MAIN:CALL INITSTART:MOV A,COUNTCJNE A,#200,NOT1S ;没到1秒跳转MOV COUNT,#00 ;1秒时间到DEC SNLEDDATAMOV A,SNLEDDATAJNZ checkewleddataMOV SNLEDDATA,SNLEDDA TAINITINC SNCOLORFLAGMOV A,SNCOLORFLAGCJNE A,#04,checkewleddataMOV SNCOLORFLAG,#01checkewleddata:DEC EWLEDDATAMOV A,EWLEDDA TAJNZ timenotoverMOV EWLEDDATA,EWLEDDATAINITINC EWCOLORFLAGMOV A,EWCOLORFLAGCJNE A,#04,timenotoverMOV EWCOLORFLAG,#01TIMENOTOVER:NOT1S:call ewcolorcheckCALL snCOLORCHECKCALL DISPLAYJMP START;*********************************************;初始化函数***********************************INIT: MOV SP,#60HMOV TMOD,#01HMOV TH0,#0eCHMOV TL0,#078HMOV COUNT,#00HMOV SNLEDDATAINIT,#15MOV EWLEDDATAINIT,#18MOV SNLEDDATA,SNLEDDA TAINITMOV EWLEDDATA,EWLEDDATAINITSETB TR0 ;开定时器0SETB ET0 ;允许定时器0中断setb ex0 ;允许外部0中断setb ex1 ;允许外部1中断setb it0 ;外部中断0下降沿触发setb it1 ;外部中断1下降沿触发SETB EA ;开总中断MOV P2,#0feHMOV SNCOLORFLAG,#01RET;*****************************************;外部中断0*********************************** exint0:push accpush pswmov a,p0push accmov a,p1push accmov a,p2push accclr ex1clr p2.0clr p2.1clr p2.2clr p2.3setb p1.4clr p1.1clr p1.2setb p1.5clr p1.3clr p1.4jnb p3.2,$setb ex1pop accmov p2,apop accmov p1,apop accmov p0,apop pswpop acc;外部中断1*********************************** exint1:push accpush pswmov a,p0push accmov a,p1push accmov a,p2push accclr ex0clr p2.0clr p2.1clr p2.2clr p2.3setb p1.4setb p1.2clr p1.1clr p1.0setb p1.3clr p1.5clr p1.4jnb p3.3,$setb ex0pop accmov p2,apop accmov p1,apop accmov p0,apop pswpop acc;T0中断函数*******************************INTT0:PUSH ACCPUSH PSWMOV TH0,#0ecH ;#0echMOV TL0,#078H ;#078hMOV A,P2RL ACJNE A,#11101111B,NOT5MOV A,#0feH ;p2.0=0,南北数码管十位亮,p2.1=0,南北数码管个位亮NOT5: MOV P2,A ;p2.2=0,东西数码管十位亮,p2.3=0,东西数码管个位亮INC COUNTPOP PSWPOP ACCRETI;****************************************;南北红绿黄灯控制**************************snCOLORCHECK:PUSH ACCPUSH BPUSH PSWsngreen:MOV A,SNCOLORFLAGCJNE A,#01,snYELLOWMOV SNLEDDATAINIT,#03 ;设置南北黄灯闪烁时间CLR P1.2CLR P1.1SETB P1.0 ;南北绿灯亮JMP snCOLORCHECKOUTsnYELLOW:;MOV A,SNCOLORFLAGCJNE A,#02,snredMOV SNLEDDATAINIT,#18 ;设置南北红灯亮时间MOV A,COUNTDIV ABMOV A,BCJNE A,#00H,snNOTFLASHCPL P1.1 ;南北黄灯闪烁CLR P1.0CLR P1.2snNOTFLASH:JMP snCOLORCHECKOUTsnred:MOV SNLEDDATAINIT,#15 ;设置南北绿灯亮时间CLR P1.0CLR P1.1SETB P1.2 ;南北红灯亮snCOLORCHECKOUT:POP PSWPOP BPOP ACCRET;******************************************************;东西红绿黄灯控制**************************************ewCOLORCHECK:PUSH ACCPUSH BPUSH PSWewred:MOV A,ewCOLORFLAGCJNE A,#01,ewyellowMOV ewLEDDATAINIT,#15 ;设置东西绿灯亮时间CLR P1.3CLR P1.4SETB P1.5 ;东西红灯亮JMP ewCOLORCHECKOUT;MOV A,ewCOLORFLAGCJNE A,#03,ewgreenMOV ewLEDDATAINIT,#18 ;设置东西红灯亮时间MOV A,COUNTMOV B,#100DIV ABMOV A,BCJNE A,#00H,ewNOTFLASHCPL P1.4 ;东西黄灯闪烁CLR P1.3CLR P1.5ewNOTFLASH:JMP ewCOLORCHECKOUTewgreen:MOV ewLEDDATAINIT,#03 ;设置东西黄灯闪烁时间CLR P1.4CLR P1.5SETB P1.3 ;东西绿灯亮ewCOLORCHECKOUT:POP PSWPOP BPOP ACCRET;************************************************************;数码管显示**************************************************DISPLAY:PUSH ACCPUSH PSWPUSH BMOV A,SNLEDDATAMOV B,#10DIV ABMOV A,EWLEDDA TAMOV B,#10DIV ABMOV R2,BMOV R3,AMOV DPTR,#TABLEMOV A,P2 DISPSNH:CJNE A,#0feH,DISPSNLMOV A,R1MOVC A,@A+DPTRMOV P0,AJMP DISPOUT DISPSNL:CJNE A,#0fdH,DISPEWHMOV A,R0MOVC A,@A+DPTRMOV P0,AJMP DISPOUT DISPEWH:CJNE A,#0fbH,DISPEWLMOV A,R3MOVC A,@A+DPTRMOV P0,AJMP DISPOUT DISPEWL:CJNE A,#0f7H,DISPOUTMOV A,R2MOVC A,@A+DPTRMOV P0,A DISPOUT:POP BRET;************************************************** TABLE:DB 3FH,06H,5BH,4FH,66H,6DH,7DH,07H,7FH,6FH; 0 1 2 3 4 5 6 7 8 9END。
51单片机LED程序代码
1.点亮一个 LED #include<reg52.h> //包含头文件,一般情况不需要改动,
//头文件包含特殊功能寄存器的定义
void delay(unsigned int sm); sbit Leden=P1^2;// led 灯控制端 sbit LED=P0^0; //第一个 led 灯
sbit wei=P1^1; // 数码管位控制,点阵列控制 sbit Line=P1^3; //点阵行控制
Line=0; P0=0XFF; //关闭数码管 wei=0;
while (1) {
//主循环
LED=0; delay(150);
} } void delay(unsigned int sm) {
for(i=sm;i>0;i--) for(j=110;j>0;j--); } 2.LED 右移 #include<reg52.h> //头文件 #include<intrins.h> sbit Leden=P1^2; sbit wei=P1^1; // 数码管位控制,点阵列控制 sbit Line=P1^3; //点阵行控制 int x,y; void delay(unsigned int); unsigned char i; //定义变量