车载网络CAN和LIN网关的应用开发
综合CAN和LIN通信功能的TPMS设计和应用
综合CAN和LIN通信功能的TPMS设计和应用本文通过TPMS在国外某车型上的设计和应用,具体介绍TPMS软硬件设计办法。
本计划中综合了CAN、LIN的设计,满足了TPMS在实际应用中的整车布线要求,并与整车总线集成,真正实现了TPMS的系统化、智能化。
2 项目需求分析及TPMS系统计划设计TPMS的设计是一个系统工程,除了产品本身的设计,需要更多关注其应用环境——汽车本身,从TPMS的安装、布线、功能、性能、通信、干扰等方面来分析,从而明确TPMS的设计要求,确定其技术计划。
2.1 TPMS技术需求分析按照车辆详细环境,对TPMS的特别技术要求分析如下:a) 信号传输是TPMS系统中的一个关键技术。
当轮胎内放射信号要传输到车内接收系统时,首先轮胎要造成信号衰减,第二车辆本身的金属壳体相当于一个屏蔽盒,这样会造成TPMS信号很不稳定。
特殊在此项目中针对的高端车型,车辆对射频信号的影响更大。
b) 轮胎内的胎压传感模块是TPMS设计中的核心内容,因为轮胎内恶劣的应用环境,使其设计濒临诸多难点。
c)在本项目设计中,原车具有1Mbps高速CAN的通信功能,因此TPMS 必需与整车的集成,实现系统的信息化、智能化控制。
2.2 TPMS应用计划设计TPMS系统包含:四个胎压传感模块、一个ECU主控模块、两个射频数字天线模块以及CAN/LIN通讯线材。
其信息处理及传输过程1所示。
图1 TPMS信号处理流程3 基于NPX1传感芯片的放射模块设计3.1 传感模块的硬件设计NPX是高精度和低功耗的集成芯片,是应用于TPMS的专用芯片,具有功能完美、性能牢靠、应用灵便等显著优点。
主要实现对轮胎压力/第1页共6页。
CAN LIN混合网络在轿车车门控制系统中的应用
CAN /LIN混合网络在轿车车门控制系统中的应用1 前言随着电子技术的发展和对汽车性能要求的不断提高,汽车上的电子产品越来越多,从而加剧了线束和汽车中可布线空间的矛盾。
基于降低传统设计中的线束数量,改善由于线束过多引起的可靠性问题,汽车网络被设计、规范和发展起来。
LIN 和CAN总线分别属于A类和B类总线中的主流形式,在汽车领域应用曰益广泛。
2 网络结构的选择区别于驱动系统,轿车车门控制系统具有如下特点:主要是人工操作,所以控制速率、更新速率相对较慢(人能接受的响应时间最大为100ms) ;网络通信的发起者为人为操作;功能数量多,线束数量大等。
考虑到通信负载、通信效率、实时性和成本,本系统的总线采用了与动力控制总线(高速CAN)不同的低速CAN辅以成本更低的LIN总线的混合总线方案。
汽车网络特点可归纳为:通信距离短、子功能模块化功能较好、扩充性要求高和可靠性要求高等。
比较星形、环行和混合形拓扑结构,总线结构的电缆长度短、可靠性高和易于扩充的特点迎合了汽车网络的需要。
加之CAN总线的错误处理机制有效地克服了总线结构故障隔离的困难,使之成为汽车网络应用的首选结构。
本系统采用了并列式和层次式并存的混合网络结构,如图1所示。
并列式网络结构可靠性好,网络速度要求低,开发费用少,开发时间短,被用于连接各车门节点;层次式网络结构中采用主/从控制,由主节点控制通信,不需要仲裁和解决冲突,因而节省了成本,用于实现距离主控制节点相对较远的后视镜的控制。
3 应用协议和信号分析CAN是一个技术规范, SAE J1939是以CAN为基础涉及了应用层的上层协议,是目前最有实用参考价值的车用网络协议。
所以系统信号编码采用了SAE J1939,保证了系统的通用性。
3.1 数据域分组原则为了提高基于CAN 系统的通信效率, SAEJ1939建议每个消息充分使用8字节数据域。
需要有充分的理由,才允许定义数据域中采用有间隙的参数群编号,并建议参数按照以下方式分组: ①按常用的子系统分组(电控单元用来分派和发送数据) ;②按相同速率分组(以减少对消息的管理) ; ③按功能分组(如机油、冷却剂、燃料供应等) 。
CAN∕LIN网络通信技术在猎豹CS10应用
CAN∕LIN网络通信技术在猎豹CS10应用随着人们对汽车的需求逐渐提高,汽车行业也逐渐迎来智能化的浪潮。
在这场智能化的浪潮中,CAN∕LIN网络通信技术应用在汽车中越来越广泛,成为了汽车行业中不可或缺的一部分。
作为中国本土的汽车品牌,猎豹CS10也在应用CAN∕LIN网络通信技术中走在了前列。
CAN(Controller Area Network)网络是一种基于广域网络技术的控制器局域网,该技术由德国博世公司在20世纪80年代推出,主要用于汽车和工业控制领域。
CAN网络把许多电子控制模块链接在一起,使它们可以相互通信,实现各种功能。
目前,CAN网络在汽车中应用非常广泛,特别是高级车型中,应用场景较多,如发动机控制模块、变速器控制模块、制动控制模块等。
而LIN(Local Interconnect Network)网络是一种低速局域网技术,但它具有高度的可靠性和实用的性能,主要用于汽车电子系统的低速数据通信。
LIN网络的应用主要是在汽车中的消费电子、门控制、信息娱乐系统等领域,是扩展CAN系统的一种重要方式。
在猎豹CS10中,CAN∕LIN网络通信技术被广泛应用于各个方面。
比如,猎豹CS10的发动机控制模块、变速器控制模块、制动控制模块等都采用CAN网络,实现了各个控制模块之间的数据通信。
此外,猎豹CS10的信息娱乐系统、车门控制系统等也采用LIN网络,实现了各个系统之间的低速数据通信。
通过CAN∕LIN网络通信技术的应用,猎豹CS10实现了各个控制模块之间的高效、稳定的数据通信,提高了汽车的整体性能和可靠性。
同时,CAN∕L IN网络通信技术也为猎豹CS10提供了更多的功能和扩展性,使车辆更加智能化、便利化。
总之,CAN∕LIN网络通信技术的应用在猎豹CS10中发挥了重要作用,为汽车行业的智能化发展做出了贡献。
相信在未来,随着汽车行业的不断发展,CAN∕LIN网络通信技术的应用会变得越来越广泛,为汽车的智能化进程提供技术支持。
CAN/LIN网关在车身网络中的设计与应用
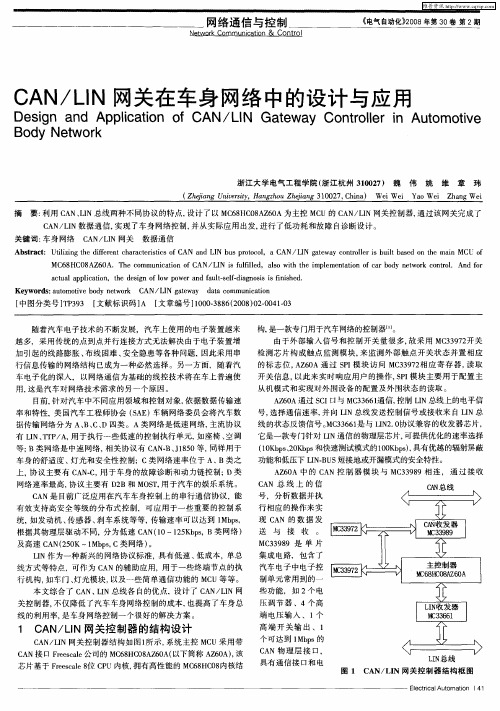
它是一款专 门针对 LN通信 的物理层芯片, I 可提供优化的速率选择 (0 b s2 K p 和快速测试模式的10 b s, 1 K p、0 bs 0K p)具有优越 的辐射屏蔽
功能 和低 压下 LN B S短 接地 或 开漏 模式 的安 全特 性 。 I .U A 6 A 中 的 C N控 制 器 模 块 与 MC 3 8 Z0 A 39 9相 连 , 通 过 接 收 C N 总 线 上 的 信 A 号 , 分 析 数 据 并 执 行 相 应 的操 作 来 实 现 C N 的 数 据 发 A 送 与 接 收 。 MC 3 8 是 单 片 39 9 集 成 电路 , 包 含 了 汽 车 电子 中电 子控 制 单 元 常 用 到 的 一 些 功 能 , 如 2个 电 压 调 节 器 、4个 高 端 电 压 输 入 、1个
据 传 输 网 络分 为 A、 、 、1 类 。 A类 网络 是 低 速 网络 , 流 协 议 B C [四 主
构, 是一款专门用于汽车网络的控制器…。 由于外部输入信号 和控 制开关量很多, 故采用 MC 3 7 开关 392
检 测 芯 片 构成 触 点 监 测 模 块 , 监 测 外 部 触 点 开关 状 态 并 置 相 应 来 的标 志 位 。 Z 0 A 6 A通 过 S I 块 访 问 M 39 2 应 寄 存 器 , 取 P模 C 37相 读
Kinetis EA低功耗车身网络(CAN和LIN网关)解决方案与参考设计
Kinetis EA低功耗车身网络(CAN和LIN网关)解决方案与参考设计一、概述该车身网络参考设计基于Kinetis EA128 MCU并采用80 LQFP封装,同时具备CAN和LIN网关通信功能,很好地体现了面向汽车应用的Kinetis EA系列MCU的超低功耗特性。
二、关键特性•Kinetis EA128可充当LIN/CAN节点•Kinetis EA128具备网关功能•Kinetis EA128 MCU采用80 LQFP封装•Kinetis EA系列与未来Kinetis汽车系列产品实现引脚兼容。
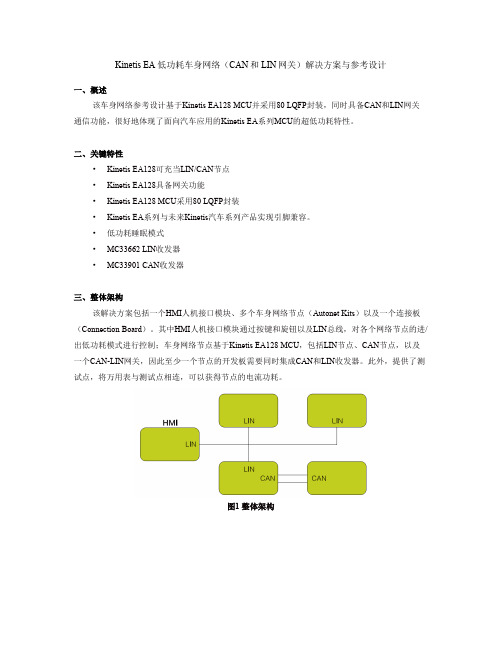
•低功耗睡眠模式•MC33662 LIN收发器•MC33901 CAN收发器三、整体架构该解决方案包括一个HMI人机接口模块、多个车身网络节点(Autonet Kits)以及一个连接板(Connection Board)。
其中HMI人机接口模块通过按键和旋钮以及LIN总线,对各个网络节点的进/出低功耗模式进行控制;车身网络节点基于Kinetis EA128 MCU,包括LIN节点、CAN节点,以及一个CAN-LIN网关,因此至少一个节点的开发板需要同时集成CAN和LIN收发器。
此外,提供了测试点,将万用表与测试点相连,可以获得节点的电流功耗。
图1 整体架构图2 网络节点图3 连接板四、操作流程a.按下HMI的按键,相应的LED灯将被点亮,这时通过旋钮可以调节各个网络节点的负载;b. 再次按下HMI按键,LED熄灭,5S之内如果没有任何操作,所有的网络节点将进入低功耗模式;c. 当网络节点进入低功耗后,通过HMI按键可以将它们唤醒;d. 进入低功耗后,可以测得车身网络节点总的电流小于11uA,而其中MC33662和MC33901的标称低功耗电流(typical)分别为6uA和5uA。
这个参考设计表明,作为车身网络节点,Kinetis EA 系列MCU具有非常优异的低功耗表现。
基于CAN-LIN网络结构的汽车网络设计

基于CAN-LIN网络结构的汽车网络设计罗淳, 雷航电子科技大学计算机科学与工程学院嵌入式实时计算研究所,(610054)E-mail:soleck@摘 要:CAN(Controller Area Network)总线是一种有效支持分布式控制和实时控制的串行通讯网络,目前已经在国外汽车的电器网络中得到了广泛的应用。
LIN(Local Interconnect Network)是一种低成本的串行通讯网络,用于实现汽车中的分布式电子系统控制。
本文主要设计实现了一种CAN、LIN结合的车身控制系统。
关键词: CAN总线,汽车网络,ECU,LIN1. 引言随着电子技术的迅速发展和在汽车上的广泛应用,汽车电子化程度越来越高。
德国Bosch公司为汽车应用而开发的CAN(Controller area network )总线技术是现代汽车广泛使用的一种汽车通讯技术。
近年来,由众多汽车制造商和半导体公司创建的LIN(Local Interconnect Network)总线方案逐步被应用到汽车通讯网络中,成为CAN通讯网络的有益补充,更好的适应汽车工业的发展。
2. CAN-LIN网络简介CAN(Controller area network )即控制器局域网,是一种能有效分布式控制和实时控制的串行通讯网络[1]。
CAN协议的一个最大特点是废除了传统的站地址编码,取而代之以对通信数据块进行编码,这样可使网络内的节点个数在理论上不受限制。
CAN总线采用了多主竞争式总线结构,具有多主站运行和分散仲裁的串行总线以及广播通信的特点[4]。
任意节点可在任意时刻主动地向网络上其他节点发送信息而不分主次,因此可在各节点之间实现自由通信。
通常的汽车网络结构采用多条不同速率的总线分别连接不同类型的节点[2]。
目前汽车上的网络连接方式主要采用2条CAN,一条是用于驱动系统的高速CAN,速率达到500kb/s,主要连接对象是发动机ECU(Electronic Control Unit 电子控单元)、ABS ECU、安全气囊ECU、组合仪表等与汽车行驶直接相关的系统;另一条用于车身系统的低速CAN,速率是100kb/s,主要连接和控制汽车内外部照明、车门开闭、雨刮电机等电器。
CAN_LIN总线在车身控制网络中的应用
Applica tion of CAN /L IN Bus in Autom otive
第一作者 : 毛春升 (1983 - ) ,男 ,硕士 研究生 , 研究方向 为汽车车身电子控 制。
图 2 车身控制网络解决方案整体结构图
3. 2 通信流程 车身系统是由车门 、座椅 、车灯等许多 L IN 子
节点通过 CAN /L IN 总线与 CAN /L IN 网关 (中央 控制模块 )相连组成的局域网 。其通信流程为 : CAN /L IN 网关即主节点采集操纵开关状态 ,同时 接收由 CAN 传来的主控制模块命令 ,并将命令数 据帧转换成 L IN 帧格式 (见图 1) ,然后由 L IN 总 线将转换后的控制命令发送给车窗 、门锁 、车灯等 L IN 子节点 ; L IN 子节点响应 ,并将子节点传感器 或开关状态及故障信息通过 L IN 返回给 CAN / L IN 网关 ; CAN /L IN 网关将收到的状态数据帧转
低压电器 ( 2006№5)
CAN /L IN总线在车身控制网络中的应用
CAN /L IN总线在车身控制 网络中的应用
毛春升 , 王 征 (武汉理工大学 汽车工程学院 , 湖北 武汉 430070 )
摘 要 : L IN协议是面向车辆低端分布式应用的串行通信协议 ,同 CAN 相结合可 构成应用与汽车的分层网络结构 。对该协议进行了详细描述 ,介绍了车身控制方案的 整体结构 ,并介绍了 CAN /L IN 控制网络的典型硬件结构 。
Body Con trol Network
汽车控制器局域网络(CAN)应用
用于 ISO11898, SAE J2284 CAN 网络
MC33897
单线CAN发送/接收器(GM系统) 用于 SAE J2411 网络
提示:按照所列产品名称查找。
汽车控制器局域网络(CAN)应用
设计难点
不同的CAN网络具有不同的功能需求
并非所有的CAN网络都是一样的。在汽车环境中,按照网络通讯的性质,CAN网络可以分为两大类。车 身控制网络,如针对乘员舒适性和便利性的系统,所处理的信息范围广,但是对顺序和频率没有特别 的要求。相反,动力系统网络传递的信息是发动机控制和变速箱控制的有关信息,需要处理的信息量 较少,但是对信息要求速度快,而且要有规则。这种差别导致需要设计不同的硬件和软件系统来应对 不同网络系统的需要。
汽车应用中的高速CAN(HSC),速度分别为 125kbps,250kbps以及500 kpbs。
SG2032-4
汽车控制器局域网络(CAN)应用
摩托罗拉解决方案
不同的CAN网络满足的CAN要求
摩托罗拉意识到汽车CAN设备和系统的设计者所面临的挑战。由于不同的CAN网络有不同的信息需求, 摩托罗拉提供了可供选择的不同CAN硬件来迎接这些挑战。
车载网络
汽车控制器局域网络(CAN)应用
SG2032/D, REV 0 12/2002
概述
控制器局部网络(CAN)是一个串行的, 异步的,多主机的通讯协议,作用是 将多个电子控制模块连接起来,用于汽 车以及其他工业应用中。 专门针对汽车应用设计的CAN对数据完备 性和数据速度的要求很高的,其速率可 达1 MBit/s。摩托罗拉拥有一个非常齐 全的产品系列,可以使得汽车电子设计 者可以方便的将CAN加入到他们的设计应 用中。
/semiconductors提示
带CAN和LIN网络的智能BCM设计
带CAN和LIN网络的智能BCM设计智能BCM(Body Control Module)是指车辆的车身控制模块,它是一个电子控制单元,主要负责车内各种功能的控制。
CAN(Controller Area Network)是一种高速数据通信协议,常用于车辆网络通信。
而LIN(Local Interconnect Network)是一种低速数据通信协议,通常用于车内简单控制。
为了更好地满足现代汽车的需求,设计出一个带有CAN和LIN网络的智能BCM非常重要。
这样的设计可以为车辆内的各种控制功能提供高效的通信机制,确保各种功能能够准确无误地运行。
在这个设计中,CAN和LIN网络将被用于不同的控制功能。
CAN网络将被用于高速数据传输,例如车辆的音频和导航系统。
这些系统需要高速数据传输才能确保用户能够得到最好的体验。
与此同时,LIN网络将被用于低速数据传输,例如自动化的车门锁定和车窗控制。
这些控制功能是车辆控制模块中最基本的功能,而LIN网络能够提供安全可靠的数据通信机制,确保这些控制功能能够正确无误地运行。
为了实现这个设计,需要一个合适的控制器来管理CAN和LIN网络。
这个控制器需要能够实现高速数据传输和低速数据传输,并能够自适应车辆内部环境的变化。
此外,它还需要具备高度的灵活性和可扩展性,以便能够满足各种不同类型的车辆和控制功能。
在整个设计中,安全性是最重要的考虑因素之一。
因此,所有的数据传输和控制功能都需要经过严格的测试和验证。
此外,该设计还应当具备电子保护功能,以确保车辆内部的各种设备在意外情况下能够得到保护。
综上所述,带有CAN和LIN网络的智能BCM设计是对现代汽车的一项重要技术创新。
它可以提高车辆内部控制功能的效率和可靠性,并确保在各种环境条件下,车辆内部的各种设备都能够正确无误地运行。
除了CAN和LIN网络,还有其他一些网络通信协议也可以应用于车辆的智能控制系统中。
例如,FlexRay(Flexible Rate)网络通信协议就是一种适用于高级汽车应用的高速数据通信协议。
车载网络CAN_LIN网关的应用开发
车载网络CAN/LIN网关的应用开发发布时间:2022-08-21T07:40:39.140Z 来源:《科技新时代》2022年1月第1期作者:黄家刚[导读] 随着电子技术的发展黄家刚柳州市续赢科技服务有限责任公司柳州市摘要:随着电子技术的发展,车载电子控制装置ECU的应用越来越多。
为了实现ECU之间的通信和数据共享,根据每个电子控制系统的复杂性以及信息量和响应速度的要求,有各种车载远程网络。
其中,德国Robert Bosch公司开发的控制器局域网CAN以其优越的性能在车载高速网络中得到了广泛的应用。
LIN网络作为一种有望成为车载低速网络标准的网络协议,不需要CAN总线的带宽和多功能,例如智能传感器与制动装置之间的通信,具有很大的应用空间。
其功能是将开关执行器和传感器从子总线连接到主总线,如CAN总线。
因此,为了实现各种车载网络之间的信息通信,有必要研究不同网络之间的互联技术。
关键词:总线协议;CAN/LIN网关;接口电路前言随着汽车工业的发展,消费者和政府有关部门对安全、舒适、节能、环保的需求推动了电子控制单元和系统在汽车上的广泛应用,汽车正日益向电子化、智能化方向发展。
然而,越来越多的电子系统也带来了新的问题。
越来越多的电子控制单元和传感器不可避免地需要越来越多的连接。
除了增加成本和重量,更重要的是给布线带来很大困难。
同时也增加了安全隐患,降低了整车的可靠性。
因此,提高电子控制单元之间的通信性能,降低布线成本已成为亟待解决的问题。
目前,车载电子控制系统主要由CAN/LIN网络组成。
不断发展的汽车网络技术还包括高速容错网络FlexRay,大多数用于多媒体和导航、蓝牙、WLAN和其他无线网络技术。
LIN是一个辅助总线网络。
在不需要CAN总线的情况下使用LIN总线可以大大降低系统成本。
大量的汽车电子技术被用来提高汽车的性能水平,这是不争的事实。
CAN总线的应用也得到了人们的认可,CAN和LIN混合网络的应用将极大地提高汽车网络的可靠性和经济性。
基于CAN_LIN总线的汽车通信网络设计

基于CAN_LIN总线的汽车通信网络设计汽车通信网络是现代汽车的重要组成部分,负责实现车辆内部各个系统之间的实时通信和信息交换。
CAN(Controller Area Network)和LIN (Local Interconnect Network)是目前广泛应用于汽车通信网络的技术。
本文将基于CAN_LIN总线的汽车通信网络进行设计,并对其进行详细描述。
首先,我们需要明确通信网络的拓扑结构。
汽车通信网络一般采用总线型的结构,其中CAN总线负责高速通信,而LIN总线主要用于低速数据传输。
CAN总线主要用于连接车辆的各个电子控制单元(ECU),包括发动机控制单元、制动系统控制单元、车身电子控制单元等。
而LIN总线则主要用于连接车内设备,如仪表板、门控制模块等。
在设计汽车通信网络时,首先需要确定通信协议。
CAN是一种高度可靠的实时通信协议,速率可达1Mbps,适用于需要高速数据传输的系统。
而LIN则是一种低速通信协议,速率一般为20kbps至100kbps,主要用于控制车内设备。
因此,在设计中,可以将CAN用于车辆内部各个ECU之间的通信,而将LIN用于车内设备之间的通信。
其次,需要确定总线中终端设备的连接方式。
在CAN总线中,每个ECU通过CAN收发器与总线相连。
CAN收发器负责将ECU中的信息转换成CAN总线上的电压信号传输,并将总线上的电压信号转换成ECU能够处理的信息。
在LIN总线中,每个设备通过LIN收发器与总线相连。
LIN收发器负责将设备中的信息转换成LIN总线上的电压信号传输,并将总线上的电压信号转换成设备能够处理的信息。
最后,需要确定通信网络的实时性和稳定性要求。
在汽车通信网络中,通信的实时性非常重要,毫秒级的延迟可能导致严重后果。
为了保证实时性,可以采用CAN的分时通信机制和LIN的帧间隔时间调整机制来确保数据的及时传输。
此外,还可以采用网络管理协议,如AUTOSAR (Automotive Open System Architecture)来管理总线上的设备和通信。
车载混合网络CANLIN网关的应用研究

云南大学学报(自然科学版),2009,31(S2):192~194CN53-1045/N ISSN0258-7971 Journal of Yunnan University车载混合网络CAN/LIN网关的应用研究陈院庆,王红蕾,李泽滔(贵州大学电气工程学院,贵州贵阳 550003)摘要:随着CAN/L IN网络在汽车车身控制系统中广泛的应用,为了实现整车的可靠通信,本文设计了一种通信网关.实现了网关的软、硬件设计,使车身控制网络系统充分实现了数据共享.关键词:CA N协议;L IN协议;CAN/L IN网关中图分类号:T P393 03 文献标识码:A 文章编号:0258-7971(2009)S2-0192-03随着汽车工业的发展,越来越多的电子控制单元与传感器必然会需要越来越多的连线,除了增加成本、增加车身自重,更重要的是给布线带来了巨大的困难,同时还增加了安全隐患,整车可靠性降低.采用汽车网络可以避免汽车电子化带来的这些困难.目前,车内的电子控制系统主要由CAN/LIN 网络组成,CAN总线只有2根导线,可直接将节点挂在总线上即可,因此走线少,系统扩充容易,改型灵活.而LIN总线是一种低成本的串行通信网络,用于实现汽车中的分布式电子系统控制.LIN是一种辅助的总线网络,在不需要CAN总线的场合使用LIN总线可大大降低系统成本.而应用CAN/ LIN网关的汽车CAN、LIN混合网络不仅可以有效地降低汽车整车成本,而且可减小总线的使用率,并可实现整个网络数据通讯的一致性、透明性[1].1 C AN、LIN总线协议规范CAN(Controller Area Network)总线是一种有效支持分布式控制和实时控制的串行通讯网络,目前已经在国外汽车的电器网络中得到了广泛的应用.它为多主方式工作,网络上任一节点均可在任意时刻主动地向网络上其他节点发送信息,而不分主从;CAN节点只需要通过对报文的标识符滤波即可实现点对点、一点对多点及全局广播等几种方式传送接收数据;CAN总线的通信介质可为双绞线、同轴电缆或光纤,选择灵活[1,2].LIN总线是一种辅助的总线网络,在不需要CAN总线的带宽和多功能场合,比如智能传感器和抽动装置之间的通讯,使用LIN总线可大大节省成本.LIN总线为单主节点/多从节点模式,即没有总线仲裁,能保证信号传输的延迟时间;基于UART接口,几乎所有的单片机都具备LIN必需的硬件;不需要改变LIN从节点的硬件和软件就可以在网上增加节点;通常一个LIN网络上节点数目小于12个,共有64个标志符.在LIN技术规范中,除了定义基本协议和物理层外还定义了开发工具和应用软件接口,使LIN总线开发变得很容易.2 网关硬件实现图1为网关的结构拓扑图,该网关允许将CAN数据帧透明地传送到LIN网络,也允许LIN 数据帧透明地传送到CAN网络,经该网关协议转换,可实现数据的交互与共享[3].2 1 主控制芯片 主控芯片是网关的核心,它的选型直接关系到外围器件的选择以及网关整体功能的实现.考虑到本网关的具体设计要求,选择Philips公司的一款基于ARM7-TDM I内核的芯片 LPC2294.本芯片通过片内PLL可实现最大为60MHz的CPU操作频率.内嵌高速Flash存收稿日期:2009-06-04作者简介:陈院庆(1982- ),男,河南人,硕士生,主要从事网络技术在控制系统中的应用方面的研究.通讯作者:王红蕾(1959- ),男,安徽人,教授,博士,硕士生导师,主要从事现场总线技术研究方面的研究.储器;汽车上空间有限,留给电子设备的空间也非常小,LPC 采用非常小的64引脚封装,外观尺寸大约只有一个大拇指指甲盖大小;由于内置了宽范围的串行通信接口,它们也非常适合于通信网关、协议转换器及其它各种类型的应用;CAN 通信是汽车上必需的,LPC2294带4路CAN 通道,内部集成CAN 控制器,只需要与收发器相连就能进行CAN 通信,硬件电路实现简单;LPC2294为工业级芯片,抗干扰能力强,适合汽车上复杂的电气环境.易于系统移植,软件操作方便.图1 网关硬件结构图F ig 1 Hardware structure o f the getway2 2 C AN 接口电路 以前的CAN 收发电路大多采用高速光耦电路实现电气隔离,这样不仅电路搭建不方便,成本偏高,而且也没有实现完全意义上的电源隔离,所以本设计采用了CTM 1040T 高速CAN 隔离收发器模块,具有隔离、ESD 保护功能;T VS 管防总线过压.完全符合ISO 11898标准的CAN 收发器;速率最高达1Mbit/s 隔离电压:DC 2500V;如果不上电,总线上无源;电磁辐射EME 极低;电磁抗干扰EM I 性极高;无需外加元件可直接使用;至少可连接110个节点;共模电压的DC 稳压.所以此模块特别适用于复杂的汽车电子环境,提高了节点的稳定性和安全性.2 3 LIN 接口电路 TJA1020是一个物理媒体连接,它是LIN 主机/从机协议控制器和LIN 传输媒体之间的接口,通过在LIN 和BAT 引脚之间串联反向电流二极管和电阻实现主机应用.协议控制器输入引脚TXD 的发送数据流被LIN 收发器转换在总线信号,而且电平翻转速率和波形都受到限制,以减少电磁辐射.图2 CA N 接口电路Fig 2 CAN inter face cir cuit3 系统软件设计方案网关软件负责CAN/LIN 信息的协议转换与发送,即当有需要时CAN 总线上的信息能准确、实时地转发到LIN 总线;当有需要时,LIN 总线上的信息能准确、实时地转发到CAN 总线;作为CAN 的一个节点,能在CAN 总线上的对相关信息发送和接收;作为LIN 的主节点,能履行LIN 主节点的功能,管理LIN 总线上的信息[4].由于CAN 的国际标准中没有对29位CAN 标识符进行定义,所以在本设计中把CAN 的标识符结构分配为:CAN 本地标识符与目的标识符,LIN 本地标识符与目的标识符.本方案中,调用CAN toLIN()与LINtoCAN()两个函数实现两种不同总线协议的转换与数据的转发.如调用CANtoLIN ()函数时,把一帧CAN 数据进行CAN 、LIN 标识的分配,把它转换为一帧LIN 格式数据,根据目的标识符把数据发送到LIN 总线上.为了对网关进行有效的管理,本方案采用系统下进行任务调度的设计方法.ARM 7系统芯片可方便地实现系统移植,本方案采用嵌入式实时操作系统 C/OS-II,本系统公开源代码,可移植性很强(采用ANSI C 编写),可固化、可裁剪、占先式、多任务、系统服务、中断管理、稳定性与可靠性都很强,图4为 C/OS-II 应用程序的启动和运行过程.4 结束语通过CANoe 对该网关数据转发功能测试、可靠性测试、抗干扰测试与实时性分析,结果表明该网关通信可靠,能实现数据的充分共享,具有很好的抗干扰性能,符合汽车级实时性的要求.193第S2期 陈院庆等:车载混合网络CAN /L IN 网关的应用研究图3 LIN 接口电路F ig 3 L IN interfacecircuit图4 多任务系统调度Fig 4 Scheduling multi-task system总之,CAN/LIN 网关的使用可以有效地降低汽车整车成本,减小总线的使用率,并可实现信息的可靠、稳定传输与共享.汽车大量应用电子技术提高汽车性能水平已是不争的事实,CAN/LIN 混合网络的应用也必使汽车网络的可靠性能和经济性得到大幅度提高.参考文献:[1] 南金瑞,刘波澜.汽车单片机及车载总线技术[M ].北京:北京理工大学出版社,2007.[2] 饶运涛,邹继军.现场总线CAN 原理与应用技术[M ].北京:北京航空航天大学出版社,2007.[3] 邓志华.车载网络CA N 和L IN 互连技术的研究[J].汽车科技,2006(1):40 43.[4] 崔俊锋,袁涛.车身混合网络中CAN /L IN 网关的设计与实现[J].微计算机信息,2006(8):201 204.A pplication development of a vehicle network CAN /LIN gatewayCHEN Yuan qing ,WANG Hong lei,LI Ze tao(School of Electrical Engineer ing ,Guizhou U niversit y,Guiyang 550003,China)Abstract :With the CAN/LIN network using in the Automobile Body Control System w idely ,in order to achieve the reliable communication in the vehicle,this articl has designed a communication gatew ay.This scheme achieved the softw are and hardwar design of the CAN/LIN gatew ay and the body netw ork control system is achieved the data sharing sufficiently in the com munication of networks.Key words :CAN protocol;LIN protocol;CAN/LIN gatew ay194云南大学学报(自然科学版) 第31卷。
汽车CAN网络测试开发方法
LIN总线技术在汽车智能灯控系统中的应用2010-10-26 09:33:42 来源:中电网关键字:LIN总线辅助网络抗电磁干扰性随着现代电子技术的不断发展和电子技术在汽车系统中的不断应用,汽车的各种性能都得到了极大的改善。
现代驾乘人员对汽车各个方面的要求越来越高,如视野性、方便性、舒适性和娱乐性等。
新的控制功能随汽车级别的提升不断增加,如中央门锁、灯光控制、玻璃升降、后视镜调节、天窗控制、座椅调节和点火延时控制等。
传统的控制系统多采用继电器和独立模式控制,这使得车内线束过多且布线复杂,从而造成了严重的电磁干扰,使系统的可靠性下降。
CAN/LIN总线技术的应用,取代了传统的线束,使信息交换变得安全、迅捷、高效。
汽车中CAN (Controller Area Network)主要用于车载各电子控制装置ECU之间交换信息,形成汽车电子控制网络。
各控制单元使用特定的总线技术来实现数字/模拟信号在中央控制单元和执行器件、传感器之间的传输。
每一个状态或事件的传输都有专门的通道。
为了将信息从中央控制单元传输到各子单元,每一个子单元都应该有通用、标准的开放式接口。
控制执行器件和传感器模块对于传输速率要求不是很高,比如后视镜定位。
所有这些低速率的模块都不需要使用CAN总线,而可选择一种相比CAN总线来说价格更低廉而有效的方式——LIN总线。
LIN(Local Interconnect Network)是一种用于汽车中分布式电子系统的新型低成本串行通信网络。
它由汽车厂商开发,专门应用于低端系统,作为CAN的辅助网络或子网络。
在不需要CAN总线的带宽和多功能的场合,比如智能传感器和制动装置之间的通信,使用LIN总线可以大大节省成本。
目前,高/低速CAN和J1850总线已经成为标准的车用网络总线。
这些总线速度极高,具有高抗电磁干扰性和高传输可靠性等优越的性能,但价格也较高。
大量的车身和安全性能方面的应用对车用网络总线的性能要求并不太高,只需要一种性价比更高的标准车用网络总线,而LIN总线正好可以满足这一需求。
CAN/LIN总线在车身控制网络上的应用
个 复 杂 的 系统 , 导致 车 身 布线 庞大 而 复杂 , 装 安
空间紧缺 , 运行可靠性 降低 , 故障维修难度增大, 电
信息 , 提高了导线利用率 , 方便布线、 故障诊断并使 维修简单 。但 由于其传输的数据量 比较少且对 实 时性要求不高 , 于 A类和 B类的 C N和 LN将 属 A I
输 数据 时 ,A C N总 线协 议控 制器 根 据 标识 码 大小 对
定 位于 车身 网络 模 块 节 点 间通 信 速 率 不 高 的低 端 通讯 , 车身 电控 单 元 集 成 , 将 智 能执 行 器 和传 将 并 感器 连接 到车 身 主体 C N 网络 。LN与 C N在车 A I A
2 0世纪 8 O年 代 以来 , 随着 集 成 电路 和 单 片机 在汽车 上 的广 泛应 用 , 汽 车 电子 与 电气 系统形 成 使
一
门集 控锁 、 身 座 椅 、 调 系统 、 窗及 后 视 镜 等 ) 车 空 车 控制 单元 之 间 建 立 的 网络 , 和传 统 布 线 相 比 , 提 它 高 了司乘人 员 的安 全性 和 舒适 性 , 供 了车 身 状况 提
第4期
21 0 1正
陕 西 交 通 职 业 技 术 学 院 学 报
J unl f hax C lg f o m n ao &T c n l y o r a ni oeeO m u i t n eh o g ao S l C ci o
NO. 4
2 l Ol
C N LN总线在 车身 控 制 网络 上 的应 用 A /I
收稿 日期 :0 15 21-
作者简 介 : 刘涛( 93一) 男 , 18 , 陕西 交通职业技术学 院教务处实践教学科科长 , 师。 讲
LIN总线在车身控制中的应用
摘要:随着车内电控单元的增加,车内通讯网络也日趋多样化。
LIN总线以其通讯成本低,开发方便等优势在车身控制方面有着良好的应用前景。
本文对LIN 总线进行了详细的描述,并以灯光控制为例说明LIN总线在车身控制中的应用。
LIN总线概述LIN总线作为使用广泛的CAN通讯网络的辅助,它基于主从结构,使用单线通讯,减少了大量线束的重量和费用。
其目标应用是不需要CAN的性能、带宽及复杂性的低速系统,如开关类负载或位置型系统,包括车的后视镜、车锁、车座椅、车窗等的控制。
LIN总线特点1) 低成本的单线12V数据传输,线的驱动和接收特性符合改进的ISO 9141单线标准;2) 传输速率可达20Kbit/s;3) 单主/多从的结构,不需要总线仲裁,由主节点来控制总线的访问;4) 基于通用UART/SCI的硬件接口,使用成本低的半导体工艺实现,几乎所有的微控制器都有LIN 必需的硬件;5) 从节点不需要晶振或陶瓷振荡器就可实现自同步,从而减少了从节点硬件成本;6) 保证在最差状况下信号传送的等待时间,避免总线访问冲突。
LIN的数据帧格式和通讯协议LIN网络由一个主节点和多个从节点构成。
所有的节点都包括一个从任务,从任务又分发送和接收任务,主节点还包括一个主任务。
LIN的数据帧由帧头和响应信息组成。
帧头包括同步间隔、同步场和信息识别符。
帧头由主任务发出,主任务在发出同步间隔后发送同步场(0x55),从节点利用同步场将它的波特率调整到传送来的信号的波特率。
在发送同步场之后,发送一字节的信息识别符,其中0~3位表示信息类别,4~5位表示信息长度,7~8位是奇偶校验。
信息识别符表示的是信息的内容,而不是信息的目的地址。
这样定义可使多个节点收到同样的信息,并且数据能够以多种方式交换。
从任务通过该字节判断数据是否与自己有关,并确定自己如何处理该数据。
响应信息是由从任务发出的,由2个、4个或8个字节长度的数据和1个字节的和校验构成。
MC微控器在汽车CAN-LIN网关中的应用
MC微控器在汽车CAN/LIN网关中的应用汽车电子技术的不断发展大大提高了汽车性能,同时也给汽车制造安装以及系统可靠性等带方面来了一系列问题。
汽车网络的诞生使汽车电子迈入了一个新的台阶,汽车网络用总线进行信息通讯,不仅解决了现代汽车电子化中出现的线路复杂和线束增加等问题,同时也是汽车通信和控制的一个重要基础。
CAN 总线和LIN 总线作为汽车总线的主流形式,在汽车领域已逐日得到广泛应用。
1 CAN/LIN 总线技术简介[1]CAN,全称为“Controller Area Network”,即控制器局域网,是国际上应用最广泛的现场总线之一。
CAN 通信协议描述了在设备之间信息如何传递。
CAN 以两种形式存在:一种是具有11 位ID 标示符的标准CAN,另一种是29 位ID 标示符的扩展CAN。
LIN,全称为“Local Interconnect Network”,是一种低成本的串行通讯网络。
LIN 的目标是为现有汽车网络(如CAN 总线)提供辅助功能,在不需要CAN 总线的带宽和多功能的场合,使用LIN 总线可大大节省成本。
CAN 总线以及LIN 总线的主要特征如表1 所示。
500)this.style.width=500;”border=“0” />2 MC68HC908GZ32 简介[2]MC68HC908GZ32 是Freescale 公司生产的8 位微控制器。
其内部具有8 位的中央处理单元、时钟发生模块、8 通道的定时器模块、8 位的键盘中断模块、增强型串行通信模块、时基模块以及CAN 通信模块等。
其容量达32KB 的片内Flash 存储器与1536B RAM 能满足多数用户的各种应用要求。
不仅有传统的串行通信接口,而且还有串行外围接口,使得芯片与外部设备、芯片与外围扩展芯片的通信和连接变得简便,具有53 个通用I/O 引脚。
MC68HC908GZ32 的上述众多功能特点,使其既可以进行CAN 网络通信,又可以进行LIN 网络通信,因此可以将其作为CAN/LIN 网关。
基于CAN-LIN总线的车身网络设计任务书
2017年
2月13日~3月3日
3月4日~4月10日
4月11日~5月10日
据论文要求收集相关文献资料,完成开题报告。
收集资料,按照要求完成设计。
论文撰写及修整
论文答辩
学生所在系审查意见:
系主任:
年月日
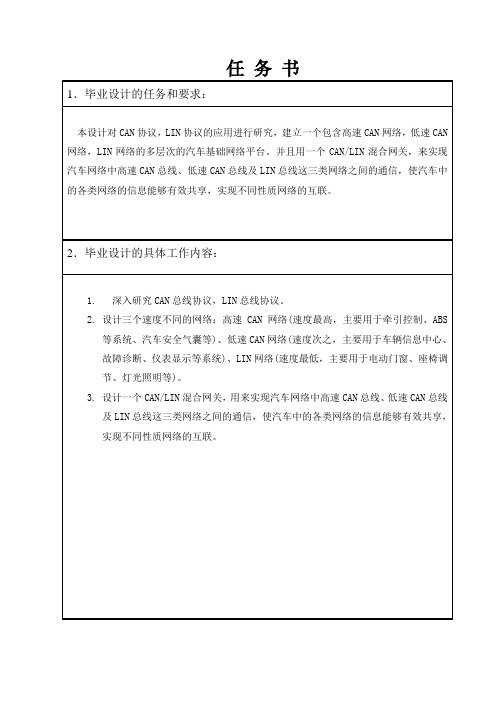
2.毕业设计的具体工作内容:
1.深入研究CAN总线协议,LIN总线协议。
2.设计三个速度不同的网络:高速CAN网络(速度最高,主要用于牵引控制、ABS等系统、汽车安全气囊等)、低速CAN网络(速度次之,主要用于车辆信息中心、故障诊断、仪表显示等系统)、LIN网络(速度最低,主要用于电动门窗、座椅调节、灯光照明等)。
3.设计一个CAN/LIN混合网关,用来实现汽车网络中高速CAN总线、低速CAN总线及LIN总线这三类网络之间的通信,使汽车中的各类网络的信息能够有效共享,实现不同性质网络的互联。
任务书
3.对毕业设计成果的要求:
1.毕业设计论文一份;
2.外文资料翻译译文(含外文原文);
4.毕业设计工作进度计划:
起迄日期
任务书
1.毕业设计的任务和要求:
本设计对CAN协议,LIN协议的应用进行研究,建立一个包含高速CAN网络,低速CAN网络,LIN网络的多层次的汽车基础网络平台。并且用一个CAN/LIN混合网关,来实现汽车网络中高速CAN总线、低速CAN总线及LIN总线这三类网络之间的通信,使汽车中的各类网络的信息能够有效共享,实现不同性质网络的互联。
CAN-LIN息线的汽车混合网关设计
CAN/LIN息线的汽车混合网关设计GM7130/7230 在汽车电子方面的应用现代社会中,伴随汽车工业与电子信息产业加速融合,汽车开始向电子化、多媒体化和智能化方向发展,由以机械产品为主向高级机电一体化产品方向演变,电子装置占汽车整车(特别是轿车) 价值量的比例逐步提高。
国内外各芯片设计、生产公司也瞄准了这个领域,推出了种类繁多、功能各异的电源芯片。
可以说,每个汽车电子工程师手头上都有很多可供选择的样品,从中选取符合要求、性价比较高的电源芯片,的确是不容易的事情!GM7130/7230 是GAMMA 公司提供的降压型PWM 调压芯片,原装进口产品,可以与2576/2596 在功能上相互兼容,性能上各有优势,而且具有更好的性价比。
具体性能介绍如下:-最大输出电流:3A;-最高输入电压:40V,HV 为60V;-输出电压:3.3V、5V、12V 和ADJ(可调)等可选;-振动频率:GM7130 为52kHz;GM7230 为150kHz;-转换效率:75%~88%(不同电压输出时的效率不同);-输出精度:±2%;-控制方式:PWM;-工作温度范围:-40℃~+125℃-工作模式:低功耗/正常两种模式可外部控制;-工作模式控制:TTL 电平兼容;-所需外部元件:仅四个(不可调)或六个(可调);-器件保护:热关断及电流限制;-封装形式:TO-220 或TO-263。
在实际应用中,符合车规的GM7130/7230 被多家汽车电子生产厂家采用,应用于汽车尾灯、汽车音响、汽车仪表、信号灯和GPS 导航仪等产品上。
在高温、大电流等恶劣环境中正常工作。
GM7130/7230 最大3A 的输出电流能够满足包括汽车尾灯、信号灯在内的大电流要求,并且能够长时间在大电流状态下正常工作。
40V 的最大输入电压,极限输入电压是45V,在正常汽车蓄电池输出24V 电压下,完全满足要求,即使在短时间内产生2 倍于输入电压的脉冲电压,也不会对芯片形成实质伤害(实验证明,使用60V 的脉冲电压,在1 秒钟内连续冲击300 次,。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
车载网络CAN/LIN网关的应用开发
作者:陈院庆, 王红蕾, CHEN Yuan Qing, WANG Hong Lei
作者单位:贵州大学电气工程学院,贵州,贵阳,550003
刊名:
微型机与应用
英文刊名:MICROCOMPUTER & ITS APPLICATIONS
年,卷(期):2009,28(23)
1.南金瑞;刘波澜汽车单片机及车载总线技术 2007
2.饶运涛;邹继军现场总线CAN原理与应用技术 2007
3.邓志华车载网络CAN和LIN互连技术的研究[期刊论文]-计算机应用 2006(01)
4.崔俊峰车射混合网络中CAN/LIN网关的设计与实现 2006(2-3)
1.崔俊锋.袁涛.Cui,Junfeng.Yuan,Tao车身混合网络中CAN/LIN网关的设计与实现[期刊论文]-微计算机信息2006(8)
2.魏伟.姚维.章玮.Wei Wei.Yao Wei.Zhang Wei CAN/LIN网关在车身网络中的设计与应用[期刊论文]-电气自动化2008,30(2)
3.王艳阳汽车车载网络的应用初探[期刊论文]-中国新技术新产品2009(8)
4.谭力铭.韩峻峰.杨叙.Tan Liming.Han Junfeng.Yang Xu基于CAN总线的车载网络传感器协议的发展与应用[期刊论文]-国外电子测量技术2009,28(11)
5.段春艳.Duan Chunyan浅谈汽车车载网络的应用[期刊论文]-中国水运(学术版)2006,6(11)
6.王欲进.江发潮.WANG Yu-jin.JIANG Fa-Chao车载网络的现状与发展[期刊论文]-车辆与动力技术2008(1)
7.余旭东基于CAN协议的车载网络及应用[期刊论文]-黑龙江科技信息2009(35)
8.徐立平大众polo车载网络组成及检修[期刊论文]-内江科技2009,30(8)
9.何敬能.程安宇.王旭芳.王平.林基郁基于MC68HC908GZ32的CAN-LIN网关设计[期刊论文]-单片机与嵌入式系统应用2007(9)
10.朱双华.李英.Zhu Shuanghua.Li Ying大切诺基系列车车载网络系统组成与检修[期刊论文]-汽车技术2008(6)
引用本文格式:陈院庆.王红蕾.CHEN Yuan Qing.WANG Hong Lei车载网络CAN/LIN网关的应用开发[期刊论文]-微型机与应用 2009(23)。