仿生袋鼠机器人问世
仿生机器人:模仿自然界的机器人设计

仿生机器人:模仿自然界的机器人设计在科技的不断进步中,仿生机器人的概念逐渐从科幻小说的幻想走向现实。
这些机器人不仅仅是冰冷的金属和电路,它们是自然界智慧的结晶,是人类对生物多样性的深刻理解和模仿。
仿生机器人的设计灵感来源于自然界中的生物,它们模仿生物的结构、功能和行为,以提高机器人的性能和适应性。
自然界中的生物经过数亿年的进化,形成了一套高效、节能的生存策略。
例如,壁虎的脚掌能够产生强大的粘附力,使其在光滑的表面上自由行走;鸟类的翅膀通过复杂的空气动力学原理,实现了高效的飞行。
这些生物特性为仿生机器人的设计提供了宝贵的参考。
在设计仿生机器人时,工程师们首先会研究目标生物的生理结构和行为模式。
通过对这些特性的深入分析,他们能够设计出具有类似功能的机器人。
例如,模仿壁虎脚掌的机器人可以在救援任务中攀爬垂直表面,模仿鸟类翅膀的无人机则能够在复杂的环境中灵活飞行。
除了模仿生物的物理特性,仿生机器人还试图模拟生物的感知和行为。
例如,通过模仿昆虫的视觉系统,机器人可以更好地识别和追踪目标;通过模仿鱼类的导航能力,水下机器人可以在没有GPS信号的深海中自主导航。
然而,仿生机器人的设计并非没有挑战。
生物的复杂性和多样性意味着机器人的设计需要高度的定制化和精细的调整。
此外,生物的某些特性可能难以完全复制,或者在机器人中实现的成本过高。
因此,工程师们需要在模仿自然界的同时,也要进行创新和优化,以确保机器人的实用性和经济性。
随着材料科学、人工智能和机器人技术的不断发展,仿生机器人的应用前景越来越广阔。
它们不仅能够执行人类难以或不愿意完成的任务,如深海探索、灾难救援和危险环境作业,还能够在医疗、教育和娱乐等领域发挥重要作用。
总之,仿生机器人是科技与自然和谐共生的典范,它们展示了人类对自然界的敬畏和学习,同时也预示着未来机器人技术的无限可能。
随着我们对自然界的进一步探索和理解,仿生机器人将更加智能、高效,成为人类生活中不可或缺的伙伴。
由动物启发发明的8个事例
由动物启发发明的8个事例科学家通过对海豚游泳阻力小的研究发明了能提高鱼雷航速的人工海豚皮;以及模仿袋鼠在沙漠运动形式的无轮汽车(跳跃机)等。
前苏联科学院动物研究所的科学家在企鹅的启示下,他们设计了一种新型汽车--“企鹅”牌极地越野汽车。
这种汽车的宽阔的底部,直接贴在雪面上,用轮勺撑动着前进,行驶速度可达50公里/小时。
科学家模仿昆虫制造了太空机器人。
澳大利亚国立大学的一个科研小组通过对几种昆虫的研究,已经研制出一个小型的导航和飞行控制装置。
这种装置可以用来装备用于火星考察的小型飞行器。
英国科学家在仿生学启发下,正在研制一种可以靠尾鳍摆动以S 形“游水”的潜艇新式潜艇的主要创新之处是使用了被称为“象鼻致动器”的装置。
“象鼻”由一组用薄而柔软的材料做成的软管组成,模仿肌肉活动,推动鳍的运动。
这种新式潜艇可以充当水底扫雷潜艇,用来对付最轻微的声响或干扰便会引爆的水雷。
令人讨厌的苍蝇,与宏伟的航天事业似乎风马牛不相及,但仿生学却把它们紧密地联系起来了。
苍蝇是声名狼藉的“逐臭之夫”,凡是腥臭污秽的地方,都有它们的踪迹。
苍蝇的嗅觉特别灵敏,远在几千米外的气味也能嗅到。
但是苍蝇并没有“鼻子”,它靠什么来充当嗅觉的呢? 原来,苍蝇的“鼻子”——嗅觉感受器分布在头部的一对触角上。
每个“鼻子”只有一个“鼻孔”与外界相通,内含上百个嗅觉神经细胞。
若有气味进入“鼻孔”,这些神经立即把气味刺激转变成神经电脉冲,送往大脑。
大脑根据不同气味物质所产生的神经电脉冲的不同,就可区别出不同气味的物质。
因此,苍蝇的触角像是一台灵敏的气体分析仪。
仿生学家由此得到启发,根据苍蝇嗅觉器的结构和功能,仿制成功一种十分奇特的小型气体分析仪。
这种仪器的“探头”不是金属,而是活的苍蝇。
就是把非常纤细的微电极插到苍蝇的嗅觉神经上,将引导出来的神经电信号经电子线路放大后,送给分析器;分析器一经发现气味物质的信号,便能发出警报。
这种仪器已经被安装在宇宙飞船的座舱里,用来检测舱内气体的成分。
仿袋鼠跳跃机器人正运动学分析

腾空阶段肢体 完 全 脱离 地 面, 各关 节 坐标 系 均为 动 坐 标 系, 考虑到躯体的质 量与 腿 的质 量比 为 2. 9, 且 就机 构模 型 而
Key wor ds: designing knowledge; tree t yped str ucture;
knowledge management
Fig 10 Tab 0 R ef 3
/ Jixie Sheji0 4437
* 收稿日期: 2004- 07- 22; 修订日期: 2004- 09- 27 基金项目: 国家自然科学基金资助项目( 50375120) 作者简介: 马利娥( 1973- ) , 女, 山西保德人, 西北工业大学机电学院硕士研究 生, 主要从事机械 设计及理论学科 领域有关仿生 工程方面的 研 究工作。
that the system has realized the picking up, stor age, inher it2
ance and r euse of designing knowledge and data, thus r aised the
speed and accuracy of parts designed.
par ts of textile machiner y based on Pro/ ENGI NEER was intr o2
duced, and a kind of expression and management method for
城市给水优化调度系统中新技术的应用研究
路进 行处理 , 向红外线源移动 。 从而 另据研究报告, 它还可 以作为操作系 统加以应用 , 如控制核动力装置管道的微型检测器。
2 仿神经网络有效地监测水位 . 5
仿生学所取得 的成就是多方面的。 当代科学 家们 已普遍认识到生物 学与数学 、 、 物理 化学及 工程技术学相结合将会产生一场新的技术革命。
一
行计算分析 , 过建 模 、 通 计算并 验证 , 了较为 准确的结论 , 而应用 取得 从 到历年的水位监测 工作 中, 为该市组 织抗洪提供 了决 策依据 , 了损 减少 失 , 了很好 的效果 。专家们在评审这一应用仿 生知识 开创 的有效 防 取得 洪措施 时 , 了充分 的肯定 。 给予
社 .9 8 19.
防洪抢险斗 争中仿用神经 网络模 型监测珠江河 网区水位变化过程 取得 了明显的效果 , 且在多 年的抗 洪斗争中应用仿生原理获得成功 。该市 并 位于珠江三 角洲腹地 , 全市河网交错 , 是典型的河网分布地域 。 其江河水 位变化受西江、 江干流 、 北 支流及潮水影响明显。 鉴于此 , 为了使 防洪 、 排 涝更加有效 ,必须对河 网地 域的水位变化规律有新的或更精确 的认识 。 研究者正是在仿生原理 的思 想指 导下 , 对过去长期 在防洪抗涝斗争 中效
果不佳的原因进行 了科学 的分析 , 认识到 : 的线性相关 分析测 报水 原有
[ ] 杜家纬. 2 仿生梦幻 [ . : M] 郑州 河南科学技术出版 社 , 0. 20 0 [ ] Lcs . 3 uaW F 生命科学模型[ . : S1 长沙 国防科技 大学出版社 ,96 19. ( 实习编辑 : 王永胜 ) 第一作者简 介 : 毅 , ,96年 1 孙 男 13 0月生 ,90年 毕业于河南师 16
【国家自然科学基金】_袋鼠机器人_基金支持热词逐年推荐_【万方软件创新助手】_20140801

推荐指数 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
2012年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20
科研热词 跳跃机器人 动力学 稳定性 弹跳机器人 非完整约束 运动仿真 行星机器人 行星探测 落地冲击 自适应结构 腿型机器人 液压驱动 欠驱动关节 欠驱动 柔性脚 有限元法 动力学分析 仿袋鼠跳跃机器人 仿袋鼠机器人 zmp法
推荐指数 3 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
2011年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
科研热词 跳高度 跳远度 袋鼠机器人 落地冲击 稳定性 积分分离pid 柔性脚趾 尾巴 动力学 关节运动控制器 六刚体 传动比 仿袋鼠机器人 仿袋鼠弹跳机器人 pwm dsp
推荐指数 4 3 2 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
2013年 序号 1 2 3 4 5 6 7 8 9 10 11 12
2013年 科研热词 运动稳定性 跳跃机器人 袋鼠机器人 落地冲击 稳定性 欠驱动 柔性机构 柔性关节 拓扑优化 动力学 仿袋鼠机器人 adams 推荐指数 1 1 1 1 1 1 1 1 1 1 1 1
2008年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18
科研热词 零点力矩 运动稳定性 跳跃机器人 试验 袋鼠跳跃机器人 着地阶段 电液驱动 液压 柔性脚 无刷直流电动机 弹跳机构 弹跳性能 动力学分析 刚柔混合 仿袋鼠机器人 仿生机器人 五刚体模型 "袋鼠"跳跃机器人
仿生学的例子

仿生学的例子我们用的东西大部分都是仿生学的功劳。
比如:飞机,中国公元前就广泛流传的玩具竹蜻蜒是直升机旋翼的起源。
直到2000多年后的18世纪,竹蜻蜒传入欧美,启发了利用旋翼的滑面力使航空器升空的设想。
1907年11月13日,法国机械师保罗?科尔尼的直升机完成了历史上首次载人飞离地面(约0.3米)。
自从人类发明了电灯,生活变得方便、丰富多了。
但电灯只能将电能的很少一部分转变成可见光,其余大部分都以热能的形式浪费掉了,而且电灯的热射线有害于人眼。
那么,有没有只发光不发热的光源呢?人类又把目光投向了大自然。
对了,萤火虫它的光是最好的,即不会伤害眼睛,也不会太刺眼,所以萤火虫是电灯的祖先啦!大乌龟背小乌龟:转动炮塔的坦克;鸟在天空飞翔:制造了各种飞行器;蜜蜂造巢窝:各种正六边形的蜂巢结构板材;袋鼠:会跳跃的越野汽车;贝壳:外壳坚固的坦克……鱼儿在水中游荡:学会了游泳,发明潜艇;有很多东西,比如雷达,就是根据蝙蝠的一些原理发明的;还有一些专业的照相机镜头是根据苍蝇的眼睛原理发明的,等等。
科学家根据野猪的鼻子测毒的奇特本领制成了世界上第一批防毒面具;火箭升空利用的是水母、墨鱼反冲原理;科研人员通过研究变色龙的变色本领,为部队研制出了不少军事伪装装备;科学家研究青蛙的眼睛,发明了电子蛙眼;美国空军通过毒蛇的“热眼”功能,研究开发出了微型热传感器;人类还利用蛙跳的原理设计了蛤蟆夯;人类模仿警犬的高灵敏嗅觉制成了用于侦缉的“电子警犬”。
现代的雷达——一种无线电定位和测距装置:科学家研究发现蝙蝠不是靠眼睛,而是靠嘴、喉和耳朵组成的回声定位系统。
因为蝙蝠在飞行时发出超声波,又能觉察出障碍物反射回来的超声波。
科学家据此设计出了现代的雷达——一种无线电定位和测距装置。
科学家通过对海豚游泳阻力小的研究发明了能提高鱼雷航速的人工海豚皮;以及模仿袋鼠在沙漠运动形式的无轮汽车(跳跃机)等。
前苏联科学院动物研究所的科学家在企鹅的启示下,他们设计了一种新型汽车——“企鹅”牌极地越野汽车。
国内外仿生技术的研究进展与发展趋势.doc

国内外仿生技术的研究进展与发展趋势摘要:生物经过进化已经很好的适应特定的环境,人类通过向它们学习可以解决特定的问题。
本文阐述了近些年来仿生学在多个领域的研究进展:通过观察分析某些动物的特定部位的结构,设计出了更加耐用,阻力更小的刀具,无痛注射的针头,水下游动机器人等;通过分析生物体的某些方面的特定功能,设计出了更加有效的中药提取技术,可以帮助盲人通过假眼辨别实物和帮助残疾人获得触觉感知的设备等;通过观察某些生物表皮材料的某些功能,设计出了超疏水太阳能电池表面。
对比近些年对仿生技术的研究进展总结了未来仿生技术的发展趋势:专业化,广泛化,智能化,科学化。
关键词:仿生技术,仿生现状,应用领域,发展趋势中图分类号:文献标识码:文章编号:0 引言地球上的生物从无到有,从简单到复杂,经过上亿年的演变进化早已适应了地球上各种各样的环境。
人类要改造特定自然环境,就必须要向早已适应相应自然环境的生物学习。
仿生学是模仿生物的科学,把生物学和其他学科像机械,建筑,医疗等结合起来的一门综合性的边缘科学[1]。
目前国内外研究仿生的方向大致分为:结构仿生,功能仿生,材料仿生,控制仿生等[2]。
自上世纪60年代初仿生学诞生以来仿生学在军事,工业,农业等领域得到广泛的应用[3]。
但是到了上世纪后期却出现了停滞现象,主观原因是由于各种现代技术的出现,人类开始对自身的能力出现一种满足感,逐渐忘记了那些比我们更能适应地球环境的生命。
客观原因是当时的技术能力还是有很大的局限性,人们虽然能观察到生物体的神奇功能却缺少必要的手段去观察和破译生物适应环境的奥秘[4]。
到了21世纪人们开始使用高速相机技术,核磁共振技术,传感器技术,等技术去观测分析生物体运作方式,仿生技术再次引起了人们的重视。
1992年机械工业部批准在吉林大学建立地面机械仿生技术部门开放研究实验室,该实验室在2000年经教育部批准成为国内唯一一个从事仿生研的国家重点实验室[5]。
bionickangaroo 仿生袋鼠机器人工作原理
bionickangaroo 仿生袋鼠机器人工作原理近年来,仿生机器人技术的发展突飞猛进,为人们带来了许多惊喜。
而其中的一种仿生机器人——Bionickangaroo 仿生袋鼠机器人更是备受瞩目。
本文将详细介绍Bionickangaroo 仿生袋鼠机器人的工作原理,包括其外形结构、能源驱动、运动原理和感知系统。
一、外形结构Bionickangaroo 仿生袋鼠机器人的外形模仿了袋鼠,具有类似的身体比例和特征。
它由主体、尾部、四肢和头部组成。
主体部分内部设有电池、电路以及控制系统,尾部则模仿袋鼠的尾巴,起到平衡和稳定的作用。
四肢采用类似袋鼠前肢和后肢的结构,有助于机器人的运动和跳跃。
头部则安装了摄像头、声纳和触觉传感器等感知系统。
二、能源驱动Bionickangaroo 仿生袋鼠机器人采用电池作为主要能源驱动。
这种电池具备高能量密度和长时间使用的特点,能够满足机器人的需求。
同时,机器人还配备了智能充电系统,可以通过无线方式或连接电源进行充电,实现长时间的持续工作。
三、运动原理Bionickangaroo 仿生袋鼠机器人的运动原理主要基于袋鼠的跳跃原理。
机器人通过四肢的协同运动,蓄能并释放能量,实现高效的跳跃。
在跳跃过程中,机器人利用尾巴提供的平衡和稳定,保持身体的姿势。
通过精准的控制和定位,机器人可以在不同的地形上实现灵活的跳跃,并且具备一定的速度和高度控制的能力。
四、感知系统Bionickangaroo 仿生袋鼠机器人配备了多种感知系统,以模仿袋鼠在环境中的感知能力。
摄像头可以实时获取周围环境图像,并通过图像处理算法进行分析和识别。
声纳模块可以发送和接收声波信号,实现远距离的距离测量和障碍物检测。
触觉传感器可以感知机器人与外界物体的接触力度和触觉反馈,从而更好地适应环境。
综上所述,Bionickangaroo 仿生袋鼠机器人的工作原理主要包括外形结构、能源驱动、运动原理和感知系统。
通过模仿袋鼠的外形和运动方式,以及具备高效的能源驱动和先进的感知系统,机器人能够在不同的环境中自如地行动和适应。
仿袋鼠跳跃机器人机构的动力学综合
仿袋鼠跳跃机器人机构的动力学综合近年来,仿生机器人技术受到了广泛关注。
仿袋鼠跳跃机器人作为一种仿生机器人,具有出色的跳跃能力,引起了研究人员的浓厚兴趣。
在进行仿袋鼠跳跃机器人机构的动力学综合研究时,研究人员首先需要了解仿袋鼠的跳跃原理。
仿袋鼠跳跃机器人的跳跃原理主要包括两个部分:弹跳力和姿态控制。
弹跳力是指仿袋鼠在跳跃时所产生的推动力,而姿态控制则是指仿袋鼠在空中维持平衡的能力。
在弹跳力方面,仿袋鼠跳跃机器人通过其特殊的腿部机构实现。
仿袋鼠的腿部结构非常灵活,具有弹性,能够在着地时储存能量并释放出巨大的弹跳力。
仿袋鼠跳跃机器人的腿部机构也采用了类似的设计理念,通过弹性材料和气压系统实现能量储存和释放,从而获得较高的跳跃高度。
在姿态控制方面,仿袋鼠跳跃机器人依靠其尾部来进行平衡调节。
仿袋鼠的尾部能够在空中扮演重要的稳定作用,通过改变尾部的位置和角度,能够使机体保持平衡并控制落地时的姿态。
仿袋鼠跳跃机器人的姿态控制机制也参考了这一原理,通过尾部的活动和传感器的反馈,实现机体的平衡控制。
对于仿袋鼠跳跃机器人机构的动力学综合研究,研究人员需要进行复杂的数学建模和仿真分析。
通过数学建模,可以描述仿袋鼠跳跃机器人的运动学和动力学特性,进而分析机器人的跳跃性能并优化设计。
同时,仿真分析可以模拟仿袋鼠跳跃机器人的运动过程,验证数学模型的准确性,并为后续实验提供指导。
综上所述,仿袋鼠跳跃机器人机构的动力学综合研究对于提高机器人的跳跃性能和稳定性具有重要意义。
通过深入研究仿袋鼠的跳跃原理,并结合数学建模和仿真分析的方法,可以为仿袋鼠跳跃机器人的设计和控制提供理论依据和技术支持,推动仿生机器人技术的发展。
仿生机器人:模仿自然界的机器人设计
仿生机器人:模仿自然界的机器人设计
在当今科技飞速发展的时代,仿生机器人正逐渐成为科技领域的焦点之一。
仿生机器人是一种模仿生物体结构和功能的机器人,它们的设计灵感来源于自然界的生物。
通过模仿生物体的形态、结构和行为,仿生机器人可以更好地适应复杂的环境和任务。
仿生机器人的设计通常受到昆虫、动物或人类的启发。
例如,一些仿生机器人的设计灵感来自昆虫,如蟑螂或蜜蜂,这些昆虫在狭窄、不稳定或充满障碍的环境中具有出色的机动能力。
仿生机器人可以借鉴昆虫的体型和运动方式,设计出更灵活、更适应复杂环境的机器人。
另外,一些仿生机器人的设计灵感来自动物,如猎豹或蝙蝠。
猎豹的高速奔跑和优秀的机动能力可以启发机器人在不同地形中快速移动和灵活转向。
而蝙蝠优秀的飞行能力和超声波定位技能,则可以用来设计无人机或者其他飞行器。
此外,仿生机器人还可以模仿人类的结构和行为。
例如,人类的手臂和手指可以启发机器人在进行精密操作或者抓取物体时更加灵活和精准。
而人类的行走和平衡技能也可以应用到机器人的设计中,使其在不平坦或不稳定的地形上行走时更加稳健。
仿生机器人的设计不仅仅是简单地复制生物体的结构,更重要的是将生物体的特性和优势融入到机器人中,以解决现实世界中的问题。
例如,在灾难救援中,仿生机器人可以模仿昆虫的爬行能力,穿越狭窄的空间寻找幸存者;在探索陌生环境时,仿生机器人可以模仿动物的感知和移动能力,帮助科学家探索未知的领域。
总的来说,仿生机器人的设计是一种充满创新和前景的领域。
通过模仿自然界的设计,仿生机器人可以更好地适应复杂的环境和任务,为人类创造出更多的可能性和机遇。
仿生机器人名词解释

仿生机器人名词解释
仿生机器人(biorobot)是一种受仿生学(biomimetics)启发
的机器人,它的设计和功能模仿了生物体的结构、特征和行为。
仿生机器人通常具有类似生物体的外形和运动方式,并且能够模拟生物体的感知、认知和行动能力。
这种机器人的目标是通过模仿生物体的优秀特性来提高机器人的性能和适应性。
仿生机器人的研究领域广泛,涵盖了生物学、计算机科学、机械工程、电子工程等多个学科。
研究人员通过对生物体的研究和观察,从中汲取灵感并将其应用于机器人的设计和开发中。
例如,仿生机器人可以模仿昆虫的飞行方式,开发出能够在狭小空间中飞行和探测的微型机器人;也可以模仿鱼的游动方式,开发出能够在水中自由移动和操作的水下机器人。
仿生机器人的应用领域广泛,包括救援任务、环境探测、医疗辅助、农业和制造业等。
通过模仿生物体的形态和功能,仿生机器人能够更加适应和应对复杂、多变的环境条件,并且具备更高的灵活性和适应性。
单足跳跃式仿袋鼠机器人的动力学优化设计

单足跳跃式仿袋鼠机器人的动力学优化设计近年来,仿生机器人技术在机器人领域取得了显著的进展。
袋鼠作为一种优秀的跳跃动物,其独特的跳跃方式吸引了众多研究者的关注。
借鉴袋鼠的跳跃机理,研发出单足跳跃式仿袋鼠机器人具有广阔的应用前景。
本文旨在对单足跳跃式仿袋鼠机器人的动力学进行优化设计。
在设计过程中,首先需要对袋鼠的跳跃方式进行深入研究。
袋鼠通过将身体重心移到腿部,利用腿部的弹性能量储存和释放实现高效的跳跃。
因此,在仿袋鼠机器人的设计中,需要考虑到腿部的弹性特性,并通过合理的机械结构设计实现能量的储存和释放。
同时,还需要考虑到机器人的稳定性和控制策略。
通过对袋鼠跳跃过程的分析,可以发现其身体在跳跃过程中保持平衡的关键在于尾部的作用。
因此,在仿袋鼠机器人的设计中应添加类似尾部的结构,以提高机器人的稳定性。
其次,需要对仿袋鼠机器人的动力学进行优化。
通过对机器人跳跃过程的深入研究,可以发现机器人的跳跃高度和距离与多个因素相关。
其中最重要的因素之一是腿部的弹性特性。
通过调整腿部的弹性系数和刚度,可以实现不同高度和距离的跳跃。
另外,机器人的质量和能量的储存和释放方式也对跳跃性能有着重要影响。
因此,在动力学优化设计中,需要综合考虑这些因素,并通过合理的参数选择和控制策略来实现机器人的最优跳跃性能。
最后,需要进行仿真和实验验证。
通过建立仿真模型,可以对优化设计进行评估和验证。
通过仿真实验,可以优化机器人的设计参数和控制策略,以实现更好的跳跃性能。
同时,还需要进行实际的物理实验,验证仿袋鼠机器人的跳跃性能和稳定性。
通过与实际袋鼠的跳跃数据进行对比,可以评估仿袋鼠机器人的仿真模型的准确性和优化设计的有效性。
综上所述,单足跳跃式仿袋鼠机器人的动力学优化设计具有重要的研究意义和应用价值。
通过对袋鼠跳跃方式的研究,可以设计出具有高效跳跃性能的仿袋鼠机器人。
通过动力学优化设计和仿真实验验证,可以不断改进机器人的跳跃性能和稳定性,为机器人在特定环境中的应用提供有力支撑。
仿生机器人

仿生制造技术之仿生机器人1、仿生机器人产生的背景早在地球上出现人类之前,各种生物已在大自然中生活了亿万年,在它们为生存而斗争的长期进化中,获得了与大自然相适应的能力。
生物学的研究可以说明,生物在进化过程中形成的极其精确和完善的机制,使它们具备了适应内外环境变化的能力。
生物界具有许多卓有成效的本领。
如体内的生物合成、能量转换、信息的接受和传递、对外界的识别、导航、定向计算和综合等,显示出许多机器所不可比拟的优越之处。
生物的小巧、灵敏、快速、高效、可靠和抗干扰性实在令人惊叹不已。
仿生制造也正是结合生物的特性所进行制造和研究的一门科学。
与此同时,随着机器人技术的发展,仿生机器人也由此应运而生。
2、仿生制造与仿生机器人的定义仿生制造:模仿生物的组织结构和运行模式的制造系统与制造过程称为“仿生制造”。
它通过模拟生物器官的自组织、自愈、自增长与自进化等功能,以迅速响应市场需求并保护自然环境。
仿生制造是先进制造技术的一个分支 ,是传统制造技术与生命科学、信息科学、材料科学等领域结合 ,是采用生物形式实现制造或以制造生物活体为目标的一种制造方法[1]。
其中仿生机械通过对生物机理、机构的研究 ,创造和完善制造工程科学的概念、原理和结构 ,从而为新产品的生产打下基础。
图1、三元交融模型[1]图2、仿生制造的研究内容及方法[1]仿生机器人:包括仿人的和仿生物的机器人两类。
前者模仿人的肌体构造或器官功能,如仿人手、手臂、类人机器人等。
后者模仿各种生物如蚂蚁、象鼻、螃蟹等的功能。
医用微型机器人更需要仿生学的支持。
机器人在人体腔内移动的机理,极可能来自某些生物运动如蜗牛爬行的启发;另外必须弄清与人体腔相关的软组织生物力学,如规律性舒张收缩等因素对微移动机器人的影响。
其中仿生机器人研究的比较多的还是四足仿生机器人,获得的成果有提出了一种基于姿态传感器信息的平衡控制方法通过使用三轴加速度传感器的反馈控制来稳定行走[2];而仿人机器人技术的一大挑战是赋予智能体自主和自适应的能力,目前做的比较好的是将基于小脑的控制系统嵌入到能够处理动态外部和内部复杂性的仿人机器人中[3]。
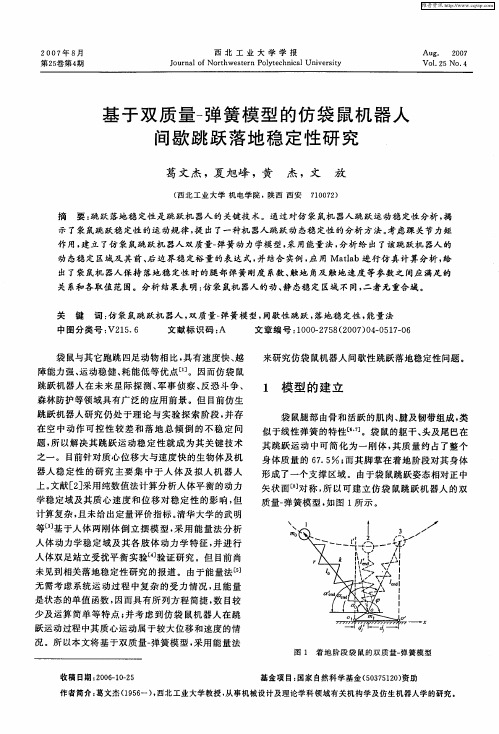
基于双质量-弹簧模型的仿袋鼠机器人间歇跳跃落地稳定性研究
森林防护 等领域 具有 广泛 的应用 前 景 。但 目前 仿生 跳 跃机 器人 研究 仍 处 于理 论 与 实验 探 索 阶段 , 存 并
在 空 中 动作 可 控 性 较 差 和 落 地 总倾 倒 的 不 稳 定 问
题 , 以解决 其跳 跃 运 动稳 定 性 就成 为 其关 键 技术 所 之一 。 目前针 对质 心位移 大 与速度 快 的生物 体及机 器人 稳 定 性 的研 究 主要 集 中于 人 体 及 拟 人 机 器 人
关 键 词 : 袋 鼠跳 跃机 器人 , 仿 双质量一 弹簧模 型 , 间歇 性跳 跃 , 落地稳 定性 , 能量Байду номын сангаас
文献标 识 码 : A 文 章编号 :0 02 5 (0 7 0 — 5 70 1 0 — 7 8 2 0 )40 1—6
中图分类号 : 1 . V2 5 6
袋 鼠与其 它跑 跳 四足动 物相 比, 有速度 快 、 具 越
质量一 弹簧模 型 , 图 1 如 所示 。
/ /。
,
上。 文献 E] z采用 纯数值 法计 算分 析人 体平 衡 的动力
学 稳定 域及 其质 心 速度 和 位 移对 稳 定 性 的影 响 , 但
计算 复杂 , 未 给出定量 评价 指标 。 且 清华 大 学的武 明
等[基 于人体 两 刚体 倒 立 摆模 型 , 用 能 量 法 分析 3 ] 采
维普资讯
20 年 8 0 7 月
西 北 工 业 大 学 学 报
J u n l fNo t we tr ltc nc l nv riy o r a rh se nPoye h ia ie st o U
A ug.
2 7 00
第2卷第4 5 期
仿生机器人的研究综述仿生机器人的研究综述
仿生机器人的研究综述摘要:介绍了国内外仿生机器人的最新发展动态。
归纳和阐述了各种类型仿生机器人的特点及研究成果,分析了仿生机器人的发展趋势。
关键词:仿生机器人;研究成果;发展趋势机器人一词的出现和世界上第一台工业机器人的问世都是近几十年的事。
然而人们对机器人的幻想与追求却已有3000多年的历史。
人类希望制造一种像人一样的机器,以便代替人类完成各种工作。
西周时期,中国的能工巧匠偃师就研制出了能歌善舞的伶人,这是中国最早记载的机器人,体现了中国劳动人民的聪明智慧。
1738年,法国天才技师杰克#戴#瓦克逊发明了一只机器鸭,它会嘎嘎叫,会游泳和喝水,还会进食和排泄。
瓦克逊的本意是想把生物的功能加以机械化而进行医学上的分析。
1893年摩尔制造了/蒸汽人0,/蒸汽人0靠蒸汽驱动双腿沿圆周走动。
进入20世纪后,机器人的研究与开发得到了更多人的关心与支持,一些适用化的机器人相继问世,1927年美国西屋公司工程师温兹利制造了第一个机器人/电报箱0,并在纽约举行的世界博览会上展出。
1959年第一台工业机器人(可编程、圆坐标)在美国诞生,开创了机器人发展的新纪元。
随着计算机技术和人工智能技术的飞速发展,使机器人在功能和技术层次上有了很大的提高,移动机器人和机器人的视觉和触觉等技术就是典型的代表。
由于这些技术的发展,推动了机器人概念的延伸。
20世纪,将具有感觉、思考、决策和动作能力的系统称为智能机器人,这是一个概括的、含义广泛的概念。
这一概念不但指导了机器人技术的研究和应用,而且又赋予了机器人技术向深广发展的巨大空间,地面机器人、微小型机器人、水下机器人、空中机器人等各种用途的机器人相继问世,许多梦想成为了现实。
仿生机器人是指模仿生物、从事生物特点工作的机器人。
仿生机器人是机器人技术领域中一个新兴的发展分支,是当前机器人领域的研究热点。
过去、现在甚至未来,对仿生机器人的研究,都是多方面的。
近些年,国内外有诸多学者开始对仿生机器人进行深入细致的研究。
盘点全球10大最牛仿生机器人--能跑能跳还能潜水概要

盘点全球 10大最牛仿生机器人能跑能跳还能潜水随着人工智能的快速发展,越来越多的机器人,开始走进人们的世界。
这些机器人功能不尽相同,形态也是各异,但是在人类的生活中,逐渐起到了越来越重要的作用。
今天小编为小伙伴们盘点了全球 10大最牛的仿生机器人,赶快来涨涨姿势吧!10、机器狗波士顿动力公司研制的机器狗使用电动 /液压系统,它能够室内和户外操作,这种四腿机器狗可以在崎岖地形奔跑,攀爬楼梯,当身体被踢后仍能保持身体平衡。
9、袋鼠机器人袋鼠机器人是德国费斯托公司研制一款模拟动物的机器人,它能够模拟袋鼠独特的运动特征,跳跃中能够恢复能量,存储并有效地用于下一次跳跃。
8、乌龟机器人这种外型颇似乌龟的机器人被命名为“沙滩机器人” ,是由迪斯尼研究实验室研制的, 它装配一个可收缩耙状装置和传感器,能够在沙滩中行进。
7、大象机器人大象机器人是使用 45吨可回收木材和钢铁制造的,它能一次携载 49名乘客,行走 45分钟。
6、机器鸟美国俄勒冈州立大学动力机械实验室研制一款机器鸟,它能够两腿奔跑,是移动速度最快,最敏捷的机器人,它的平衡能力较强,可以抵挡踢打和重击,甚至抵挡躲避球碰撞。
5、机器蛇日本研制的 ACM-R5H 模拟蛇,可用于搜索营救任务,以及水下环境勘测。
在机器蛇身体前端安装着无线相机,能够拍摄到清晰的图像。
4、蚂蚁机器人德国费斯托公司擅长研制模拟动物的机器人,蚂蚁机器人就是其中之一,一群蚂蚁机器人能够协同工作处理任务,类似于真实蚂蚁在一起完成一个共同任务。
3、鲨鱼机器人美国海军最新研制一款机器人叫做“幽灵游泳者” ,外型颇似鲨鱼,可以实现无人操控潜水航行,体长 1.5米,重量 45公斤,它可用于情报侦察、监测任务,以及检测船体安全性 2、猎豹机器人波士顿动力公司研制一款猎豹机器人,奔跑速度快于任何人类,可达到时速 45.5公里,能够模拟猎豹的奔跑方式。
1、狼蛛机器人Robugtix 公司研制 T8机器人,它采用 3D 打印部件组装而成,能够模拟狼蛛运动方式, 身体上安装着 26个不同电动机,每条腿上安装 3个,腹部安装 2个。
2022-2023学年北京师大附属实验中学八年级(上)期中生物试卷

2022-2023学年北京师大附属实验中学八年级(上)期中生物试卷试题数:31,满分:1001.(单选题,2分)红袋鼠是体型最大的有袋类动物,它们具有强健而有力的长着长脚的后肢,以此可以推测红袋鼠最主要的运动方式是()A.爬行B.行走C.游泳D.跳跃2.(单选题,2分)动物一般都能自由运动且运动方式多种多样,下列相关叙述正确的是()A.动物的运动方式与生活环境相适应B.动物的运动只依赖运动系统完成C.陆生动物的运动速度快于水生动物D.水生动物运动过程不需要消耗能量3.(单选题,2分)大夫给骨折病人做手术时,特别要注意保护的结构是()A.骨密质B.骨松质C.骨膜D.红骨髓4.(单选题,2分)青少年要注意坐、立、行的正确姿势,可以避免驼背、脊柱侧弯等毛病,这是因为少儿时期()A.骨中有机物不足1,硬脆,弹性小3,柔韧,弹性大B.骨中有机物超过13,硬脆,弹性大C.骨中有机物不足13D.骨中有机物超过1,柔韧,弹性小35.(单选题,2分)为了更好地理解运动系统,辰辰同学利用硬纸板、松紧带和工字钉制作了如图所示的肌肉牵拉骨运动的模型,下列说法正确的是()A.工字钉模拟关节,在运动中起杠杆作用B.松紧带模拟肌肉,在运动中起支点作用C.硬纸板模拟骨,在运动中提供动力D.若按图示箭头方向运动,下方的松紧带模拟的肌肉呈收缩状态6.(单选题,2分)排球是北京中考项目,以下是对垫排球时一系列动作的分析,错误的是()A.该运动在神经系统的协调下完成B.运动时机体所消耗的能量来自于肌细胞内有机物的分解C.该运动由一块骨骼肌收缩完成D.适当进行该运动可以增强体质7.(单选题,2分)如图是用哑铃增强上臂肌肉力量的锻炼方法。
下列说法中错误的是()A.[ ① ]肱二头肌,由肌腱和肌腹两部分构成B.屈肘时[ ① ]处于舒张状态,[ ② ]处于收缩状态C.[ ③ ]关节是运动系统中的重要结构,既牢固又灵活D.这种运动是在神经系统的调节下,相关的骨骼肌收缩,牵引骨围绕关节活动产生的8.(单选题,2分)蜜蜂营群体生活,一个蜂群通常由一只蜂王、几万只工蜂和几百只雄蜂组成。
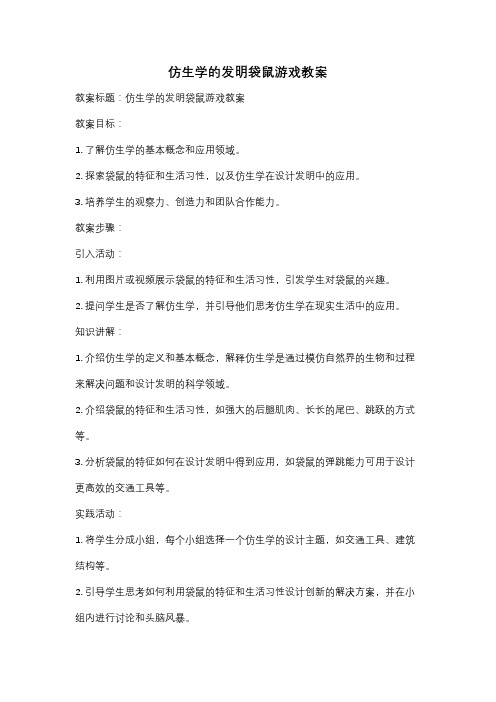
仿袋鼠腿形跳跃机器人结构[发明专利]
![仿袋鼠腿形跳跃机器人结构[发明专利]](https://img.taocdn.com/s3/m/4a616ca66aec0975f46527d3240c844769eaa006.png)
[19]中华人民共和国国家知识产权局[12]发明专利申请公布说明书[11]公开号CN 101244729A [43]公开日2008年8月20日[21]申请号200810017793.2[22]申请日2008.03.26[21]申请号200810017793.2[71]申请人西北工业大学地址710072陕西省西安市友谊西路127号[72]发明人葛文杰 沈平 张文涛 江曼 [74]专利代理机构西北工业大学专利中心代理人顾潮琪[51]Int.CI.B62D 57/00 (2006.01)A63H 11/06 (2006.01)权利要求书 1 页 说明书 3 页 附图 3 页[54]发明名称仿袋鼠腿形跳跃机器人结构[57]摘要本发明公开了一种仿袋鼠腿形跳跃机器人结构,在机体上安装负载,机体下侧通过支撑架连接机器人膝关节,机器人膝关节通过腿部轴与机器人小腿连接,小腿的下端为机器人踝关节,脚掌与小腿在踝关节处通过脚掌轴连接,踝关节同时位于脚掌的1/3处,脚掌与脚趾通过脚趾轴连接,脚趾轴位于脚掌前端,下置弹簧一端安装于脚掌后端,一端安装于小腿的2/5处,上置弹簧一端安装于小腿上端,一端安装于机体的1/2处;动力机构通过上耳环和下耳环分别与小腿和脚掌连接。
本发明提高了机器人的跳跃效率,增强了跳跃能力。
200810017793.2权 利 要 求 书第1/1页1、仿袋鼠腿形跳跃机器人结构,包括机体、小腿、脚掌和脚趾,其特征在于:机体上安装负载,机体下侧通过支撑架连接机器人膝关节,机器人膝关节通过腿部轴与机器人小腿连接,小腿的下端为机器人踝关节,脚掌与小腿在踝关节处通过脚掌轴连接,踝关节同时位于脚掌的1/3处,脚掌与脚趾通过脚趾轴连接,脚趾轴位于脚掌前端,下置弹簧一端安装于脚掌后端,一端安装于小腿的2/5处,上置弹簧一端安装于小腿上端,一端安装于机体的1/2处;动力机构通过上耳环和下耳环分别与小腿和脚掌连接。
2、根据利用权利要求1所述的仿袋鼠腿形跳跃机器人结构,其特征在于:所述的小腿和脚掌的长度比例为2∶1,脚掌和脚趾的长度比例为3∶1。
仿生学的发明袋鼠游戏教案
仿生学的发明袋鼠游戏教案教案标题:仿生学的发明袋鼠游戏教案教案目标:1. 了解仿生学的基本概念和应用领域。
2. 探索袋鼠的特征和生活习性,以及仿生学在设计发明中的应用。
3. 培养学生的观察力、创造力和团队合作能力。
教案步骤:引入活动:1. 利用图片或视频展示袋鼠的特征和生活习性,引发学生对袋鼠的兴趣。
2. 提问学生是否了解仿生学,并引导他们思考仿生学在现实生活中的应用。
知识讲解:1. 介绍仿生学的定义和基本概念,解释仿生学是通过模仿自然界的生物和过程来解决问题和设计发明的科学领域。
2. 介绍袋鼠的特征和生活习性,如强大的后腿肌肉、长长的尾巴、跳跃的方式等。
3. 分析袋鼠的特征如何在设计发明中得到应用,如袋鼠的弹跳能力可用于设计更高效的交通工具等。
实践活动:1. 将学生分成小组,每个小组选择一个仿生学的设计主题,如交通工具、建筑结构等。
2. 引导学生思考如何利用袋鼠的特征和生活习性设计创新的解决方案,并在小组内进行讨论和头脑风暴。
3. 每个小组设计并制作一个仿生学发明模型,展示他们的想法和成果。
4. 学生们互相交流和评价彼此的设计,并讨论如何进一步完善和改进。
总结和展示:1. 学生展示他们的仿生学发明模型,并解释他们如何应用袋鼠的特征和生活习性。
2. 引导学生总结本次活动的收获和体会,思考仿生学在解决实际问题中的重要性。
3. 鼓励学生分享他们对仿生学的更多兴趣和研究方向,并提供相关资源和书籍推荐。
教案评估:1. 观察学生在小组讨论和头脑风暴中的积极参与程度。
2. 评价学生设计的仿生学发明模型的创意和实用性。
3. 收集学生对本次活动的反馈和总结,了解他们对仿生学的理解和兴趣程度。
教案拓展:1. 鼓励学生进行更深入的仿生学研究,探索更多生物特征和生活习性在设计中的应用。
2. 组织学生参观科技创新展览或邀请专业人士分享他们在仿生学领域的研究成果。
3. 引导学生进行仿生学项目的实践,如设计和制作能够模仿动物运动的机器人等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
仿生袋鼠机器人问世
最近一家来自德国名叫Festo公司开发出了一种仿生袋鼠机器人,可以完全模拟袋鼠行走的姿势,甚至达到普通袋鼠跳跃的高度。
仿生学可是机器人研究制造领域的必须要掌握的一门技术。
而最近一家来自德国名叫Festo公司开发出了一种仿生袋鼠机器人(Bionic Kangaroo),可以完全模拟袋鼠行走的姿势,甚至达到普通袋鼠跳跃的高度。
Festo公司是一家专业从事工业自动化研究的知名企业,该公司致力于将袋鼠跳跃技能重现到机械装置上的研究已经有相当长的一段时间。
而目前最新推出的这款袋鼠机器人,摆脱了此前面临的不稳定性及易爆炸性等缺陷,而最终在电子器械拼装上成功的实现了袋鼠这种动物的跳跃技能。
据悉,这款名为“电子袋鼠”的机器人实为气动系统所控制,它腿部的电子“肌腱”,结合气体力学弹簧,可以帮助它精确平稳地奔跑或着地。
在触地爪部内层的压缩空气推力作用下,实现向上向前地跳跃动作。
腿向后蹬,袋鼠机器人就能够前进。
而在空中的时候,其又会收回到前方。
这款机器人每完成一次跳跃动作,其爪部便会储存空气能量以继续下一次的跳跃动作。
为了支持这系列动作的持续,研发人员在“电子袋鼠”两只触地的支撑脚上安装了固定的弹簧装置,以此来模仿真实袋鼠动物脚上的两根蹄筋,为一次又一次的跳跃动作起到缓和作用。
而为了使机器人跳跃时在半空中也能够保持一定的稳定性,研发人员在其身体后部安装了一根尾巴,以帮助其保持机体平衡。
通过传感装置,机器人袋鼠能够将每次准备跳跃动作时需储存的能量数据传达给研发人员。
据悉,这款机器人身高超过1米,体重约合7千克,其每次实现的跳跃动作大致在40厘米高、80厘米长的范围内。
根据研发制造人员透露,袋鼠机器人在工业上的应用作用主要体现在能源技术储备方面上。
其实袋鼠机器人早已并不是Festo公司的第一款仿生学机器人,在2008年该公司推出了“水母机器人”后来在2013年又推出了“蜻蜓机器人”,再加上现在推出的这款“袋鼠机器人”,看来人类目前在仿生学和机器人制造领域已经有了很好的结合。