CCC防喘振控制介绍资料【全】
CCC防喘振控制介绍资料[全]
![CCC防喘振控制介绍资料[全]](https://img.taocdn.com/s3/m/622df0264431b90d6c85c76a.png)
CCC公司技术特点 及其在炼油装置的应用
Compressor Controls Corporation (CCC) 美国压缩机控制公司
1
2012 Compressor Controls Corporation
交流内容
1. CCC公司控制技术特点 2.可用性与可靠性
qr2,op qr2
22
引入操作点至喘振控制线之间的距离
• 第一步: 引入参数 d:
d = 1 - Ss
• 第二步: 引入参数 DEV(偏差值): DEV = d - 喘振控制裕量
• 参数DEV 与压缩机的尺寸无关, 但对所有压缩机描述都是相同的
2012 Compressor Controls Corporation
2012 Compressor Controls Corporation
简化喘振参数采用Rc替代hr
• 用无压关缩的比坐标Rc系代替简化多变压头同样可以获得与入口条件
• 喘振接近变量 Ss 变成
Ss =
f1(Rc) q2r,op
这输里入R由c函对数应f的1我q们r 2可以得出
• 这种重转算速要法N提避用示免于了:监C使视C用C目T仍的d 然和。强Ts烈变建送议器安装Td 和 Ts 变送器 以及
jr Re
这里: • hr • qr • Ne ·a • jr • Re • Rc
= 简化的压头 = 简化的流量 = 线性化的转速 = 导叶角度 = 简化的功率 = 雷诺数 = 压比
15
控制算法
相关联的坐标系 (Hp, Qs)
• 无关坐标系(hr, qr2)
2012 Compressor Controls Corporation
压缩机防喘振控制

压缩机防喘振控制方法
压缩机防喘振的控制方法大致可分为固定极限 流量法和可变极限流量法,
1 . 固定极限流量法
固定极限流量是使压 缩机的入口流量保持控制线大于源自高转速下的临界流量,从而避免进
入喘振区运行,但在
低转速下效率太低,
能量浪费太大,
2 . 可变极限流量法
可变极限流量法是为 了减少压缩机的能量 损耗,在压缩机负荷 经常波动的场合采用,
4. 喘振的原因
当压缩机入口气体流量小于压缩机的最小流量 时,会导致压缩机排气管压力比机组内部压力 高,这时气体会发生瞬间倒流,压缩气体倒流又 使得排出侧气体压力降低,机组内部压力升高, 使气体流量恢复,直到出口压力升高,又重复上 述过程,这就是压缩机的喘振,
压缩机性能曲线的最高点就是喘振点,
离心压缩机特性
2. 喘振 当压缩机的负荷降低到一定程度时,气体排送会 发生往复运动的强烈振荡,从而导致机身的剧 烈振动,称为喘振,这是气体动力装置的一种特 性,
离心式压缩机与轴流式压缩机的比较
离心压缩机适用于中、小流量和中、高压力的 场合,流量约20~2000Nm3/min,大的可达 10000Nm3/min,单缸压比约 3.5~10,多缸排气 压力可高达90MPa以上,多变效率约为 76~83 %,
3. 压缩机的工作点
因为压缩机是串联在管路中,故当它正常工作 时,必须满足:
1 流过压缩机的气量必须等于流过管路的气量 指换算到同一状态下 ;
2 管端压力pe应与压缩机的排压相等,
因此,压缩机的工作点一定是在该压缩机的性 能曲线与管路特性曲线的交点上,
压缩机的工作点
性能曲线
工作点
管路特性曲线
压缩机的种类
2. 根据压缩机的压缩形式分,可分为往复式压 缩机、回转式压缩机、离心式压缩机和轴流式 压缩机,
基于TRICON控制系统防喘振控制算法
基于TRICON控制系统防喘振控制算法李明辉;金千山【摘要】喘振是造成压缩机损坏的重要原因,在此针对某厂70万吨/年烯烃项目,根据丙烯工艺流程,设计了一套压缩机的防喘振控制系统。
该控制系统以TRIEW软件为人机界面,利用TRICON独有的防喘振控制软件包,将喘振PID控制、喘振超驰、手动控制算法相结合,通过喘振PID参数的在线优化,有效地实现了压缩机的防喘振控制,现场实际运行结果表明了该系统的稳定性和可靠性,同时,验证了该喘振控制算法的有效性。
%Surge is the main reason to cause the compressor damage. For 700000 t/a olefin project,an anti-surge control system for compressors was designed according to a factory propylene technological process. The control system takes TRIVEW software as the man-machine interfase,and combines surge PID,surge override with manual control algorithm by means of TRICON′s own unique anti-surge control software package. The anti-surge control of compressor was achieved after optimization of surge PID parameters. The practical operation result shows the stability and reliability of the system,and verifies the effective-ness of the surge control algorithm.【期刊名称】《现代电子技术》【年(卷),期】2014(000)006【总页数】4页(P32-34,38)【关键词】TRICON;防喘振控制;离心压缩机;PID【作者】李明辉;金千山【作者单位】中国石油天然气股份有限公司抚顺石化分公司洗涤剂厂,辽宁抚顺113001;中国石油天然气股份有限公司抚顺石化分公司洗涤剂厂,辽宁抚顺113001【正文语种】中文【中图分类】TN919-34;TP212离心压缩机以其运行效率高、易损件少、运转平稳、经济效益好等优点,在石油化工行业中得到广泛应用,并且已经成为工艺设备的核心[1]。
压缩机喘振与3C防喘振控制器在空压机上的设计策略
压缩机喘振与3C防喘振控制器在空压机上的设计策略王飞【摘要】For successful application of 3C antisurge controller in the 3TY air compressor in the Chemical Branch of Solution , a simple analysis is about the reason and phenomenon of the compressor surge and the dangers of the surge of compressor equipment .The introduction is about antisurge controller being produced by American CCC (Compressor Control Company , hereinafter referred to as 3C) from the following aspects , the calculation of the variable surge and the meaning of various surge line of control and some advanced control methods and characteristics of antisurge control on compressor , as well as the requirement of on -site measurement signal of 3C antisurge control system and movement sensitivity of antisurge regulating valve .% 针对3 C防喘振控制器在解化化工分公司3 TY空压机上的的成功应用,简单分析了压缩机发生喘振的原因、现象及喘振对压缩机设备的危害性。
3C控制原理及操作要点

• 注意事项: • 1)由于开机后负荷较小,蒸汽用量不大, 蒸汽管网的波动对汽轮机转速影响很大,一 定要注意蒸汽管网背压的稳定,否则会造成 很大的后果。 • 2)3C系统大家经常看一看,注意熟悉各压 力的极限值,由于3C只是一味的进行转速的 调节,机组在CCS画面的运行参数尤其是振 动、油压等需要大家关注,已保护设备为先。
• 3.2 进入启机程序
点“启动”按钮并确认 点 “手动输出”(注意:必须点“手动输出”的字 体,因为在转速为0时,给转速数值不动作) 点“手动输出”后出现升速小画面框,点箭头升速( 注意转速跨过0后,可以给转速输出值) 手动升到“暖机转速一”800rpm, 注意将“SPEED” 联锁复位、将“速关油压低”联锁复位。 120S后再手动升到“暖机转速二”1000rpm(注意 为保证干气密封使用,尽量不要在1000rpm以下停 留太长时间),1000rpm停留2分钟后,升速至 1500rpm(此时时间可以稍微长一点,保证汽轮机出 口温升不要太快)
3C控制系统原理及操作要点
重整单元
• 1.流程简述 • 本装置共设2台多级离心压缩机组,分别是 重整循环氢压缩机K201和产氢增压压缩机 K202。重整产物分液罐D201顶气体经K201 增压后大部分作为循环氢至重整反应系统; 剩余部分气体经空冷A202至D202分液,其 顶部气体经增压机K202一段压缩后,再经空 冷A203冷却后进入D203分液,其顶部气体 再进入K202二段压缩后与经泵P201升压后的 重整生成油进行再接触。再接触罐D204顶分 离出的氢气经脱氯后进氢气管网供外部加氢 装置使用。
继续升速跨过临界转速至5100rpm,3C系统内的防 喘振控制系统开始起作用,若防喘振控制在自动状 态,就开始逐渐关一、二段防喘振阀;) 可调转速5338rpm,在进入可调转速前,把蒸汽放空 并入背压。升到可调转速5338rpm后,一定要点 “进入运行”按钮,进入到可调转速区 只有到可调转速区,才能将CCS系统切换至CCC系统 (注意:5100RPM条件仅决定了防喘振控制器的介 入条件。转速控制器的调节范围和D201压控投用条 件仍为转速大于5338RPM。请不要混淆。)
CCC防喘振控制介绍资料【全】

h p,red
= s
Rc - 1
q2 = DPos s,red
Ps
建立喘振线
• 喘振线上的各点(如右图)可 用至原点的斜率来表示.采 用实测方式得到.
2012 Compressor Controls Corporation
hr hr
qr,SLL
2
qr
2
• 喘振参数可以被定义 位如下: f1(hr ) Ss = 2 qr ,op • 喘振线各点即可用涵数f1(hr)对应的值 qr2 计算
模拟式控制器
100% 2012 Compressor Controls Corporation SCL SLL
操作点
•
• • • •
0% 100%
时间
• •
控制器输出
优秀的工程承包商,会对控制器执行速 率对压缩机的防喘振能力的影响进行评 估 建立压缩机的动态仿真 在动态仿真层面上对数字式控制器与模 拟式控制器进行对比 模拟式控制器无执行周期,响应迅速 精确整定的模拟式控制器,使超调量达 到最小 使数字式控制器获得同样的整定参数 使数字式控制器获得同样的扰动
2012 Compressor Controls Corporation
•
为了实现控制目标,对于几何结构不变的压缩机,我们希望喘振线(SLL) 由单一的曲线来表示
13
控制算法
• 产生全新的控制算法的过程:
2012 Compressor Controls Corporation
– 审查实际需要 – 开发一个数学模型 – 通过计算机建模对控制算法进行模拟 仿真 – 将此控制算法应用到现场
这里由函数f1我们可以得出 输入Rc对应的 qr 2
• 这种算法避免了使用Td 和 Ts 变送器 重要提示: CCC 仍然强烈建议安装Td 和 Ts 变送器 以及 转速N 用于监视目的。
3C控制原理及操作要点
图1、离心式压缩机通用压比-流量特性曲线
• K201作为循环氢压缩机,其出口循环氢及置 换气经反应系统返回入口,流量远远高于正 常工况下K201发生喘振时的流量。K202在其 一、二段出口均设置了防喘振控制阀,当压
比高、流量低时,防喘控制控制程序会打开 防喘阀将出口气返回入口防止机组喘振。
• 3、装置3C控制系统 • 3.1 工艺控制 • 3.1.1、D201压控:“K201入口罐D201压力
• 注意:因为压力PT-20801受K202和K201的共同影响,所以当PIC21001A的输出0%或100%时,需手动调节K201的转速。
• 3.1.3、D202压力超限控制:“氢气增压机 K202入口缓冲罐压力放空PIC-21001B”单回路 控制方案。
• PIC-21001B的设定值=PIC-21001A的设定值+ 偏差设定值(目前是0.1MPag),如果PIC21001A出现突然升高且高于设定值PIC21001B要打开。
• 计算公式
• 喘振控制通过测量入口流量、出入口压力、 出入口温度来实时计算出一个无量纲的S值 作为控制的测量值,再引入闭环PI控制、开 环阶梯响应(RT)以及前馈控制等来实现防 喘振控制。作为喘振控制的基础,S值的算 法如下:
• Ss = K*f1(hr)/ qr2op
f振 qK1r(2h点OrP)简压化缩流机流计量运量算的行与 调平点多节方简变参q化r2能数SL流P头量的平函方数,其值等于喘
PIC-21001A控制器的压力时,此指示灯亮。 • Remote:远程指示灯。因此控制器为最高级控制器,此信号无
意义。
• Fallback:故障策略(FB)指示灯。当仪表故障时(信号异常,超 出4~20mA范围,如断线或短路时),此指示灯亮,发出报警信 息,控制器保持当前状态不变。
循环气压缩机防喘振控制
资料范本本资料为word版本,可以直接编辑和打印,感谢您的下载循环气压缩机防喘振控制地点:__________________时间:__________________说明:本资料适用于约定双方经过谈判,协商而共同承认,共同遵守的责任与义务,仅供参考,文档可直接下载或修改,不需要的部分可直接删除,使用时请详细阅读内容循环气压缩机防喘振控制摘要:本文系统介绍TRICON系统在循环气压缩机机组防喘振控制的应用及控制原理。
重点介绍防喘振系统的功能模块的构建,同时简述机组运行故障时的检修方法与分析思路。
关键词定义:喘振机理喘振线防喘振控制安全裕量盘旋设定点1、前言:大型离心式压缩机组由于其高效,经济,在现代企业中应用广泛,成为工艺连续运行的“心脏”。
但是由于其造价相对于往复式压缩机而言要高很多,控制系统复杂,而且占用的空间大等缺点,对于工艺成熟的企业一般不设置备用机组。
喘振是离心式压缩机固有的特性,每一台离心式压缩机都有它一定的喘振区,因此只能采取相应的防喘振调节方案以防止喘振的发生。
本文以天利高新技术公司醇酮厂的循环气压缩机C41101(SVK1-H型)为例,详细介绍TRICON三重化控制系统如何构建机组防喘振系统,并简述防喘振仪表常见故障的处理方法。
2、离心式压缩机喘振机理:离心式压缩机的特性曲线与喘振离心式压缩机的特性曲线是指压缩机的出口压力与入口压力之比(或称压缩比)与进口体积流量之间的关系曲线P2/P1~Q的关系,其压缩比是指绝对压力之比,特性曲线如图所示:图2.1 离心式压缩机喘振曲线由图2.1可见,其特性曲线随着转速不同而上下移动,组成一组特性曲线,而且每一条特性曲线都有一个最高点。
如果把各条曲线最高点联接起来得到一条表征喘振的极限曲线,如图中虚线。
所以,图中还有阴影部分称为喘振(或飞动)区;在虚线的右侧为正常工作区。
实线与虚线之间是临界区,压缩机可以运行,但太靠近喘振区,应尽量避免长期工作。
TRICON调速及防喘振功能描述1

TRICON 调速及防喘振功能描述蒸汽透平的速度控制 :TRICONEX 将根据汽轮机主机厂的起机曲线编制自动或半自动起机程序。
在通常应用中,机组的速度控制可以有多种运行方式,包括停机、启动、暖机、加速、运行等。
在自动起机模式下,根据起机曲线的升速率,蒸汽透平将自动从零转速升到最小转速或额定转速。
另外,还将组态迅速越过临界转速的控制。
在半自动起机模式下,操作工可在从零转速到最小转速之间的任何转速下停留。
一旦达到最小转速,操作人员可将转速进一步提高到工作转速。
防喘振控制基本原理: 机组投入运行后,TRICON 系统将根据压缩机入口流量、入口压力、出口压力及相应的温度,利用TRICONEX 独特的防喘振技术来判断是否发生喘振。
如发生喘振,则由防喘振控制器的输出值进行调节防喘振控制阀。
A通用喘振线喘振参数压缩机的喘振点可由压比(Pd/Ps )及入口流量表测出的入口流量计算得出。
入口流量的测量值与 Pd, Ps, Td,及Ts 等可用来计算等价孔板值h (该孔板可视为位于压缩机的入口),进而作出喘振预测。
hs = hd Ps PdTs Td 防喘控制的 I/O 要求 TagType Function PTAI 入口/出口压力 TTAI 入口/出口温度 FT AI入口流量 PV AO防喘阀 SOVDO 旁路/放空阀 ESD DI跳车输出 防喘控制方框图TRICONEX 的防喘控制系统可由各个独立的功能模块来描述,每个模块都有各自已定义的功能,并通过输入输出信号(均给出位号名)与其它功能模块相互连接和作用。
F rom A dditional C om pressor Sections防喘模块方框图TRICON 喘振控制器特性特性简介:因为喘振发生得很快,必须使用特殊的控制技术来保证防喘阀及时打开。
TRICON控制器的运算速度很快,而且能够高效处理复杂的算法,所以TRICON控制器可以理想地实现防喘控制。
防喘控制策略的标准特性有:可选择Pd/Ps对h/Ps或Dp对h的算法如果喘振发生,喘振安全裕度可自动调整设定点浮动线功能可以在工作点向喘振线窜动时及时打开防喘阀特殊的喘振控制器带有适应增益及快开/慢关响应等功能比例调节功能可以‘迫使’防喘阀独立于控制过程而打开灵活的起机和跳车逻辑可选择手动控制帮助设定、测试和故障排除当喘振逼近或透平跳车时,电磁阀触点输出可“打开”防喘阀说明:如果实际应用需要,以上特性均可实现,未要求的特性则不予实现。
防喘振功能详解

防喘控制的 I/O要求
Tag
Type
Function
PT
AI
入口/出口压力
TT
AI
入口/出口温度
FT
AI
入口流量
PV
AO
防喘阀
SOV
DO
旁路/放空阀
ESD DI
跳车输出
防喘控制方框图
TRICONEX的防喘控制系统可由各个独立的功 能模块来描述,每个模块都有各自已定义的功能, 并通过输入输出信号(均给出位号名)与其它功能 模块相互连接和作用。
如果系统检测到工作点越过喘振线,表示喘振已发生,喘振控制线将被自动调节 到右方,而加大安全余量。
可能导致喘振的条件有: 因压缩机磨损导致喘振线移位 变送器调校不准确 安全裕度不足 过程条件突变 喘振线设置错误 每当如前述喘振被检测到,安全裕度增加(控制线右移)一个校准量。输入一个
防喘模块方框图
各块的功能介绍
TS3000控制系统的喘振控制功能用上图形象的表达,每一个模块都定 义一种具体的控制功能,各种控制功能相互作用,构成一个完整的防 喘振控制系统。
模块 1 选定控制算法。 模块 2 检测工作点离喘振控制曲线的远近情况。 模块 3 喘振安全域 (即喘振控制曲线与喘振曲线之间的距离)重新校
比例功能:
系统有一纯比例调节阶段,该阶段可独立于正常PI控制器 打开防喘阀。当工作点移到喘振控制线左方,而正常PI控 制器无法提供足够响应,可能导致严重的过程失序时,则 进入该阶段。亦即在控制线左方到达某一特定裕度,则打 开防喘阀,进入该阶段。当工作点与喘振线重合时,防喘 阀全开。换言之,工作点进入喘振控制线及喘振线之间时, 防喘阀按比例打开。该比例阶段是由信号选择器来实现的。 控制器的反馈动作迫使控制器输出跟踪该阶段。
3C控制原理及操作要点
• 计算公式
• 喘振控制通过测量入口流量、出入口压力、 出入口温度来实时计算出一个无量纲的S值 作为控制的测量值,再引入闭环PI控制、开 环阶梯响应(RT)以及前馈控制等来实现防 喘振控制。作为喘振控制的基础,S值的算 法如下:
• Ss = K*f1(hr)/ qr2op
f1(hr) 流量与多变能头的函数,其值等于喘 振点简化流量的平方qr2SLP qr2OP 压缩机运行点简化流量平方 K 计算调节参数 hr 简化多变能头(reduced polytropic head) Rc 压比(compression ratio) 多变能头指数(polytropic head exponent) Pd, Ps ,Td,Ts 出入口压力、温度
• 3.1.3、D202压力超限控制:“氢气增压机 K202入口缓冲罐压力放空PIC-21001B”单回路 控制方案。 • PIC-21001B的设定值=PIC-21001A的设定值+ 偏差设定值(目前是0.1MPag),如果PIC21001A出现突然升高且高于设定值PIC21001B要打开。 • 当PT-21001超过0.65Mpag时,将D202顶排放 阀PV-21001B打开泄压,以保持压力不超限。
3.2 防喘振控制 3.2.1 压机组比高限防喘振控制
• 设置了二段出口压力高限控制(设定点 2.3Mpag)和一段入口压力低限控制(设定 点0.3MPag)。 当压力达到设定点时,此指 示灯亮,并打开回流阀,以保持压力不超限 (即二级出口压力不高于2.3Mpag,一段入 口压力不低于0.3MPag),设定点2.3Mpag和 0.3MPag可调。
图1、离心式压缩机通用压比-流量特性曲线
• K201作为循环氢压缩机,其出口循环氢及置 换气经反应系统返回入口,流量远远高于正 常工况下K201发生喘振时的流量。K202在其 一、二段出口均设置了防喘振控制阀,当压 比高、流量低时,防喘控制控制程序会打开 防喘阀将出口气返回入口防止机组喘振。
压缩机防喘振控制及应用

压缩机防喘振控制及应用作者:张家瑞曹铮罗啸天来源:《今日自动化》2019年第03期摘要:离心式压缩机运行过程中,叶轮高速旋转经由扩压机扩压之后,会提升气体的压力,满足工业生产的需求,其在工业生产中占据着非常关键的地位,且其应用越来越广泛。
在压缩机实际运行中,由于其自身运行机理和外部因素的共同影响导致其容易出现喘振现象,不利于压缩机的安全、稳定运行。
所以,对离心压缩机喘振原因进行分析,并采取合适的防喘振措施,对于保证现代工业生产的安全稳定进行非常重要。
文中以C02压缩机为例对压缩机防喘振系统出现的问题进行了分析,然后提出了一些改造和防范措施,希望能够进一步促进压缩机的安全、稳定运行。
关键词:压缩机;防喘振;问题分析;防范措施中图分类号:TP272文献标识码:A文章编号:2095-6487(2019)03-0041-020引言离心式压缩机在当前工业生产中应用非常广泛,在钢铁、化工以及石油等行业都有运用,其主要功能为压缩并输送气体。
CO2压缩机的防喘振控制系统若是抗干扰性能、控制性能较差,很容易对其装置的稳定运行产生较大的影响,从而只能依靠手动控制进行。
通常来说,CO2压缩机都存在防喘振控制功能与不完善,以及性能与防喘振控制缺乏协调功能,导致压缩机的性能无法得到有效的调节,进而大大影响到气化运行德定性。
所以,需要对C02压缩机防喘振控制系统中存在的问題进行有效分析,并通过技术改造,来提高整体设备的使用性能,使其更加高效的运行。
1防喘振控制系统常见问题CO2压缩机的防喘振控制系统常见问题主要有三点,其一是防喘制余f较大,且压缩机的回流阀开度也较大,使得CO2压缩机在运行过程中,容易出现较大的能源损耗;其二是防喘振控制的抗干扰性能较差,且运行不稳定,使得整个C02压缩机装置的运行状态受到影响,只能依靠手动进行控制;其三是压缩机的性能与防喘振控射功能还缺乏完善性,且防喘振控射与性能没有很好的协调运作,导致压缩机的性能无法得到更好的调节。
防喘振控制原理及方法
4.2 离心压缩机防喘振控制4.2.1 离心压缩机的喘振1.离心压缩机喘振现象及原因离心式压缩机在运行过程中,可能会出现这样一种现象,即当负荷低于某一定值时,气体的正常输送遭到破坏,气体的排出量时多时少,忽进忽出,发生强烈震荡,并发出如同哮喘病人“喘气”的噪声。
此时可看到气体出口压力表、流量表的指示大幅波动。
随之,机身也会剧烈震动,并带动出口管道、厂房震动,压缩机会发出周期性间断的吼响声。
如不及时 采取措施,将使压缩机遭到严重破坏。
例如压缩机部件、密封环、轴承、叶轮、管线等设备和部件的损坏,这种现象就是离心式压缩机的喘振,或称飞动。
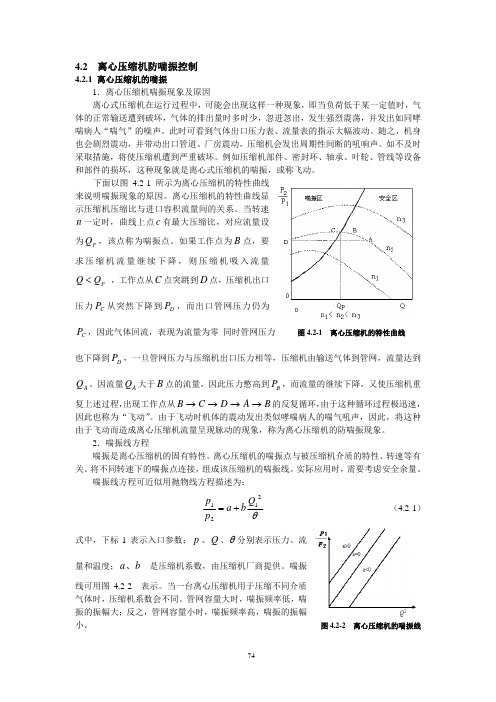
下面以图 4.2-1 所示为离心压缩机的特性曲线来说明喘振现象的原因。
离心压缩机的特性曲线显示压缩机压缩比与进口容积流量间的关系。
当转速n 一定时,曲线上点c 有最大压缩比,对应流量设为P Q ,该点称为喘振点。
如果工作点为B 点,要求压缩机流量继续下降,则压缩机吸入流量P Q Q < ,工作点从C 点突跳到D 点,压缩机出口压力C P 从突然下降到D P ,而出口管网压力仍为C P ,因此气体回流,表现为流量为零 同时管网压力 图4.2-1 离心压缩机的特性曲线 也下降到D P ,一旦管网压力与压缩机出口压力相等,压缩机由输送气体到管网,流量达到A Q 。
因流量A Q 大于B 点的流量,因此压力憋高到B P ,而流量的继续下降,又使压缩机重复上述过程,出现工作点从B A D C B →→→→的反复循环,由于这种循环过程极迅速,因此也称为“飞动”。
由于飞动时机体的震动发出类似哮喘病人的喘气吼声,因此,将这种由于飞动而造成离心压缩机流量呈现脉动的现象,称为离心压缩机的防喘振现象。
2.喘振线方程喘振是离心压缩机的固有特性。
离心压缩机的喘振点与被压缩机介质的特性、转速等有关。
将不同转速下的喘振点连接,组成该压缩机的喘振线。
实际应用时,需要考虑安全余量。
喘振线方程可近似用抛物线方程描述为:θ2121Q b a p p += (4.2-1)式中,下标1表示入口参数;p 、Q 、θ分别表示压力、流量和温度;b a 、是压缩机系数,由压缩机厂商提供。
防喘振控制原理及方法

4.2 离心压缩机防喘振控制4.2.1 离心压缩机的喘振1.离心压缩机喘振现象及原因离心式压缩机在运行过程中,可能会出现这样一种现象,即当负荷低于某一定值时,气体的正常输送遭到破坏,气体的排出量时多时少,忽进忽出,发生强烈震荡,并发出如同哮喘病人“喘气”的噪声。
此时可看到气体出口压力表、流量表的指示大幅波动。
随之,机身也会剧烈震动,并带动出口管道、厂房震动,压缩机会发出周期性间断的吼响声。
如不及时 采取措施,将使压缩机遭到严重破坏。
例如压缩机部件、密封环、轴承、叶轮、管线等设备和部件的损坏,这种现象就是离心式压缩机的喘振,或称飞动。
下面以图 4.2-1 所示为离心压缩机的特性曲线来说明喘振现象的原因。
离心压缩机的特性曲线显示压缩机压缩比与进口容积流量间的关系。
当转速n 一定时,曲线上点c 有最大压缩比,对应流量设为P Q ,该点称为喘振点。
如果工作点为B 点,要求压缩机流量继续下降,则压缩机吸入流量P Q Q < ,工作点从C 点突跳到D 点,压缩机出口压力C P 从突然下降到D P ,而出口管网压力仍为C P ,因此气体回流,表现为流量为零 同时管网压力 图4.2-1 离心压缩机的特性曲线 也下降到D P ,一旦管网压力与压缩机出口压力相等,压缩机由输送气体到管网,流量达到A Q 。
因流量A Q 大于B 点的流量,因此压力憋高到B P ,而流量的继续下降,又使压缩机重复上述过程,出现工作点从B A D C B →→→→的反复循环,由于这种循环过程极迅速,因此也称为“飞动”。
由于飞动时机体的震动发出类似哮喘病人的喘气吼声,因此,将这种由于飞动而造成离心压缩机流量呈现脉动的现象,称为离心压缩机的防喘振现象。
2.喘振线方程喘振是离心压缩机的固有特性。
离心压缩机的喘振点与被压缩机介质的特性、转速等有关。
将不同转速下的喘振点连接,组成该压缩机的喘振线。
实际应用时,需要考虑安全余量。
喘振线方程可近似用抛物线方程描述为:θ2121Q b a p p += (4.2-1)式中,下标1表示入口参数;p 、Q 、θ分别表示压力、流量和温度;b a 、是压缩机系数,由压缩机厂商提供。
防喘振资料
P d /P s 1 .0 0 2 .7 0 3 .5 9 4 .8 3 6 .4 0 3 .9 0
D a ta fro m c o m p re s s o r c urve
k -1 ne =
k * np
C=
Max Flow (lb/min)
100 * Ps * MW Ts(deg R) * Z
Pd =
F ro m A d d itio n a l C o m p resso r S ectio n s
(if app licable)
STUP
13
Valve Line arize / R e ve rs e
Re cycle
Valve v V2 (AO )
TS3000
人机界面软件(HMI)
• 数据选取快捷易懂 • 联接简单 • 标准文件格式 • 流程实时图表
A Invensys Company
TS3000
压缩机效率监测
• 利用性能曲线 • 实时效率跟踪 • 监测时间间隔优化 • 透平/压缩机早期故障报警
TS3000
Polytropic Head
Brake Horsepower
A Invensys Company
2500 2000 1500
Compressor Perfromance Curve
Loops in Auto Speed > Min Gov No Critical Faults *
* No critical faults refers to failed
transmitters or other failures that would make loadsharing impossible
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Pd
B
A
D C
2012 Compressor Controls Corporation
压缩机停车点,无压力,无流量
Qs, vol
.
7
2012 Compressor Controls Corporation
导致出现喘振的因素
• 开车 • 停车 • 在低负荷下操作 • 在高负荷下运行出现下述工况:
– 紧急停车 – 动力降低 – 操作人员失误 – 工艺扰动 – 负荷变化 – 气体成份变化 – 冷却器故障 – 过滤器故障 – 驱动故障
Controls 控制系统
Machinery 机组
CCC
Turbomachinery Controls
CCC机组控制技术
Process
工. 艺
4
CCC控制技术-限制控制
压力
增加控制裕度
工艺过程极限
最大转速线 功率极限
2012 Compressor Controls Corporation
实际的 可操作区
参数分析或归纳 .
无关坐标系
第1组
hr qr Ne a
jr Re
第2组
Rc qr Ne a
jr Re
这里:
• hr • qr • Ne ·a
= 简化的压头 = 简化的流量 = 线性化的转速 = 导叶角度
• jr • Re
= 简化的功率 = 雷诺数
• Rc
= 压比
15
控制算法
ห้องสมุดไป่ตู้相关联的坐标系 (Hp, Qs)
• 喘振不仅仅出现在低负荷操作工况下,而是在各种工况下都可能出 现。
.
如何避免喘振
2012 Compressor Controls Corporation
• 增快反应速度
– 变送器 –阀 – 控制器 – 系统体积
用专门设计的控制技术
– 自动开环 – 解耦控制 – 可调喘振控制线 – 自调整增益控制参数 – 喘振线确定及喘振试验
➢ 3.并联负荷分配优化控制 ➢ C的工程实践
➢ 5.压缩机性能咨询 (CPA) ➢ C公司5系列控制系统
➢ FCC机组优化节能系统
.
2
2012 Compressor Controls Corporation
➢1. CCC公司控制技术特点
.
3
2012 Compressor Controls Corporation
2012 Compressor Controls Corporation
CCC公司技术特点 及其在炼油装置的应用
Compressor Controls Corporation (CCC) 美国压缩机控制公司
.
1
2012 Compressor Controls Corporation
➢ 交流内容
➢1. CCC公司控制技术特点 ➢ 2.可用性与可靠性
表述压缩机操作特征的基本变量
Hp = f0(Q, w, m, r, a, d, a)
J = f1(Q, w, m, r, a, d, a)
这里: • Hp •J •Q ·w ·m ·r •a •d ·a
= 多变压头 = 功率 = 体积流率 = 转速 = 粘度 = 密度 = 本地音速 = 特征长度变量 =入口导叶角度
• 这些定义的性能曲线图用于一组特定的入口条件: ps, Ts, MW 及 ks
.
11
控制算法
• 通常情况下的,问使题用是由这OE些M坐厂标家系所统提与供入压口缩条机件性有能关曲,线如图下的所坐示标:系统所存在
2012 Compressor Controls Corporation
.
12
控制算法
.
10
2012 Compressor Controls Corporation
控制算法
•
典型的压缩机性能曲线图包括: pd) 坐标系统,这里:
(Qs,
Hp),
(Qs,
Rc),
或
(Qs,
Qs = 能够表示为实际或标准体积流率的入口流量 Hp = 多变压头 Rc = 压缩比 (pd / ps) pd = 压缩机出口压头 ps = 压缩机入口压头 ks = 等熵压缩指数
• 无关坐标系(hr, qr2)
2012 Compressor Controls Corporation
这里:
• Hp
= 多变压头
• Qs
= 入口体积流量
•
•.
hr qr2
=简化的压头 = 简化的流量的平方
16
控制算法
相关坐标系 (Rc, Qs)
无关坐标系 (Rc, qr2)
2012 Compressor Controls Corporation
.
9
2012 Compressor Controls Corporation
压缩机控制所面临的挑战
• 一个成功的压缩机控制系统应由下列部分组成:
– 一个能够准确定义操作点及其相应的喘振极限的算法 – 能够允许数字控制器进行快速及时的模拟控制的控制器执行速率 – 控制响应能够针对不同的操作工况使用不同的安全裕度 – 先进的控制方案能够防止回路间相互作用所产生的负面影响 – 动作迅速,流通能力适宜的防喘振控制阀 – 去除整个系统内不必要的死区时间和滞后时间
最小转速
操作的稳定区
流量
.
5
扩大了操作范围
•一般的控制
极限
设定点 运行点
•CCC的控制
极限 设定点
运行点
2012 Compressor Controls Corporation
基本因素
- 先进的算法 - 解耦控制 - 高速的硬件
.
6
喘振现象
让我们用一个离心式空气压缩机 向一密闭容器内供气的模型来解释 喘振是如何形成的
这里:
• Rc
= 压头
• Qs
= 入口体积流量
• qr2
= 简化的流量的平方
.
17
控制算法
2012 Compressor Controls Corporation D i s . P r e s s u r e P s ig Reduced Head
• 那么,喘振极限就会变成一个曲面,而不是一条曲线
2012 Compressor Controls Corporation
• 为了实现控制目标,对于几何结构不变的压缩机,我们希望喘振线(SLL) 由单一的曲线来表示
.
13
控制算法
2012 Compressor Controls Corporation
• 产生全新的控制算法的过程:
– 审查实际需要 – 开发一个数学模型 – 通过计算机建模对控制算法进行模拟
仿真 – 将此控制算法应用到现场
.
14
控制算法
• 下述变量用于设计及对压缩机的特征进行表述 • 通过参数分析(或归纳),我们分离出两组无关的坐标系
2012 Compressor Controls Corporation