科尔摩根伺服报警代码(中文)
科尔摩根伺服报警代码中文

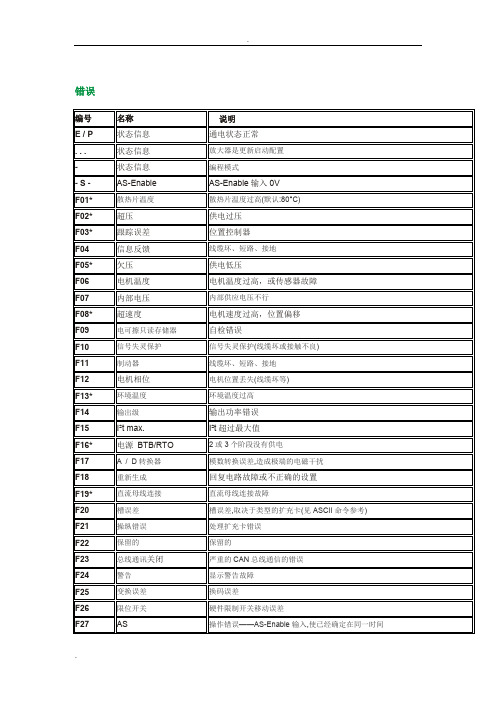
科尔摩根伺服报警代码(中文)————————————————————————————————作者: ————————————————————————————————日期:错误编号名称说明E /P 状态信息通电状态正常... 状态信息放大器是更新启动配置- 状态信息编程模式- S -AS-Enable AS-Enable输入0VF01* 散热片温度散热片温度过高(默认:80°C)F02* 超压供电过压F03* 跟踪误差位置控制器F04 信息反馈线缆坏、短路、接地F05* 欠压供电低压F06 电机温度电机温度过高,或传感器故障F07 内部电压内部供应电压不行F08* 超速度电机速度过高,位置偏移F09 电可擦只读存储器自检错误F10 信号失灵保护信号失灵保护(线缆坏或接触不良)F11 制动器线缆坏、短路、接地F12电机相位电机位置丢失(线缆坏等)F13* 环境温度环境温度过高F14 输出级输出功率错误F15 I²t max.I²t超过最大值F16* 电源BTB/RTO 2或3个阶段没有供电F17 A / D转换器模数转换误差,造成极端的电磁干扰F18重新生成回复电路故障或不正确的设置F19* 直流母线连接直流母线连接故障F20 槽误差槽误差,取决于类型的扩充卡(见ASCII命令参考) F21 操纵错误处理扩充卡错误F22 保留的保留的F23 总线通讯关闭严重的CAN总线通信的错误F24警告显示警告故障F25 变换误差换码误差F26 限位开关硬件限制开关移动误差F27AS操作错误——AS-Enable输入,使已经确定在同一时间F28 现场总线错误现场总线错误(见ASCII命令参考)F29 现场总线错误现场总线通信干扰(见ASCII命令参考)F30 紧急暂停暂停,紧急停车F31 保留保留F32系统错误系统软件没有反应正确警告信息编号名称说明E/P状态信息通电状态正常. . . 状态信息放大器是更新启动配置- S-AS-Enable AS-Enable输入0V- 状态信息编程模式n01 I²t I²t临界值超过n02 回复电压达到预设电压n03* S_故障超过预置下的错误限制n04*响应监测响应监测(现场总线)已经启动n05 供应阶段供电相丢失n06* SW限制开关1通过软件限制开关1n07* SW限制开关2通过软件限制开关2n08 运动任务误差a faulty motiontask was startedn09 没有参考点no reference point(Home) set at start of motion taskn10* PSTOP PSTOP限位开关激活n11* NSTOP NSTOP限位开关激活n12 电机加载默认值只有ENDAT或HIPERFACE,差异电机数字保存在该编码器和放大器、电机负载默认值n13* 扩展卡24 V直流供电为I/O扩充卡不可以n14 SinCos反馈SinCos换向器(激发和运动)没有完成,将被取消当放大器被激活和激发和运震动进行了n15 保留保留n16 总结警告总结了n31到n17警告n17 现场总线的同步CAN同步没有登录n18 multiturn overflow max.超过电的机转数量n19 motion task rampsare limited在运动范围溢出任务数据n20 无效运动任务无效运动任务n21 PLC程序错误详情见可编程序控制器(PLC)的代码n22 max. motor temperaturreachedthe user can shut down theprocessbefore thetemperatureeror will interrupt the processimmediatel yn23SinCos反馈到达警告等级n24 数字I /O配置不合乎逻辑n25-n31保留保留n32 固件版本固件版本是一个n故障错误诠释显示意义可能原因措施/解释HMI(人机界面)消息:通信故障电缆使用错误使用null-modem电缆伺服放大器或PC上电缆插错位置正确的插伺服放大器和PC电缆插头错误的PC接口选择选择正确的界面F01* 散热片温度散热片温度过高调整系统设置温度(80)或降低环境温度放大器过脏检查/吹出通风槽。
科尔摩根伺服说明书

CD S YNQ N ETQ UICK S TART G UIDERevision No: 7Date: 22 December 20041. General1.1 Safety InformationOnly qualified personnel are permitted to transport, assembly, commission, and maintenance this equipment. Properly qualified personnel are persons who are familiar with the transport, assembly, installation, commissioning and operation of motors, and who have the appropriate qualifications for their jobs. The qualified personnel must know and observe the following standards and regulations:IEC 364 resp. CENELEC HD 384 or DIN VDE 0100 IEC report 664 or DIN VDE 0110National regulations for safety and accident prevention or VBG 4 •Read all available documentation before assembly and commissioning. Incorrect handling of products in this manual can result in injury and damage to persons and machinery. Strictly adhere to the technical information on the installation requirements.• It is vital to ensure that all system components are connected to earth ground. Electrical safety is impossible without a low-resistance earth connection.•The SERVOSTAR® product contains electro-statically sensitive components that can be damaged by incorrect handling. Discharge any electrical shock potential from you before touching the product. Avoid contact with high insulating materials (artificial fabrics, plastic film, etc.). Place the product on a conductive surface.• During operation keep all covers and cabinet doors shut. Otherwise, there are deadly hazards that could possibility cause severe damage to health or the product.• In operation, depending on the degree of enclosure protection, the product can have bare components that are live or have hot surfaces. Control and power cables can carry a high voltage even when the motor is not rotating. • Never pull out or plug in the product while the system is live. There is a danger of electric arcing and danger to persons and contacts.•After powering down the product, wait at least ten minutes before touching live sections of the equipment or undoing connections (e.g., contacts, screwed connections). Capacitors can store dangerous voltages for long periods of time after power has been switched off. To be safe, measure the contact points with a meter before touching.When these symbols are seen in this manual, be alert to the potential for personal injury. Follow the recommended precautions and safe operating practices included with the alert symbols. Safety notices in this manual provide important information. Read and be familiar with these instructions before attempting installation, operation, or maintenance. The purpose of this section is to alert users to possible safety hazards associated with this equipment and the precautions that need to be taken to reduce the risk of personal injury and damage to the equipment. Failure to observe these precautions could result in serious bodily injury,damage to the equipment, or operational difficulty. The safety-alert symbols are:Warning Alerts users to potential physical danger or harm. Failure to follow warning notices could result in personal injury or death.Caution Directs attention to general precautions, which if not followed, could result in personal injuryand/or equipment damage.Note Highlights information critical to your understanding or use of the product.1.2 Limited WarrantyIncludes software provided by KollmorgenSeller warrants that the Goods sold hereunder are free from defects in material and workmanship for the product warranty period of each item of Goods (Product Warranty Periods are listed below). Seller warrants its Good(s) only to the originalpurchaser (the “Customer”), and in the case of original equipment manufacturers or distributors, only to their original consumer (the “Customer”). There are no warranties whatsoever on Goods built or acquired, wholly or partially, to a buyer’s designs or specificationsThis express warranty is in lieu of and exclude all other warranties, express or implied, by operation or law or otherwiseincluding THE WARRANTY OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE (WHETHER KNOWN TO SELLER OR NOT), all other such warranties being hereby expressly disclaimed by Seller and waived by Buyer. Written notice of claimed defects shall have been given to Seller within the period set forth in the schedule below, and within thirty (30) days from the date any such defect is first discovered.广州科沃—工控维修的120 www.gzkowo.com1.2.1 Product Warranty SchedulesBrand Products Warranty Period Kollmorgen Standard Brush-type Motors,Electronics and Accessories12 months from date of manufactureKollmorgen Standard Brushless Motors, Electronicsand Accessories24 months from date of manufactureKollmorgen Standard Step Motors, Stepper Controlsand Accessories12 months from date of manufactureKollmorgen Custom Motion Systems or componentsof any type To be negotiated on a case-by-case basis, and set forth in the order.Pacific Scientific All Products 24 months from date of manufactureSuperior All Products 12 months from date of manufactureThe Goods or parts claimed to be defective must be returned to Seller, accompanied by a Return Material Authorization (RMA) issued by Seller’s facility responsible for supplying Goods, with transportation prepaid by Customer, with written specifications of the claimed defect.If a warranty claim is valid, Seller shall pay reasonable one-way costs of transportation of the defective Goods from either the original destination or the location where defect occurred, whichever is closest to Seller’s facility. Under no circumstances shall Seller be liable for removal of Seller’s Goods from Buyer’s equipment or re-installation into Buyer's equipment.No person, including any agent, distributor, or representative of Seller, is authorized to make any representation or warranty on behalf of Seller concerning any goods manufactured by Seller, except to refer purchasers to this warranty.1.2.2 GeneralIndemnityBuyer agrees to hold Seller harmless from any and all liability, and to pay all costs and attorney’s fees, for injury or damage to persons or property caused in any manner by Goods covered by the order while in possession or under the control of Buyer or Buyer’s successor in interest.1.2.3 Use As DirectedThe following guidelines describe the restrictions for proper use of the SERVOSTAR CD SynqNet system: • The amplifiers are components built into electrical equipment or machines and can only be commissioned as integral components of such equipment.• The servo amplifiers are to be used only on earthed three-phase industrial mains supply networks (TN-system, TT-system with earthed neutral point).• The servo amplifiers must not be operated on power supply networks without an earth or with an asymmetrical earth.• If the servo amplifiers are used in residential areas, or in business or commercial premises, the user must implement additional filter measures.• The servo amplifiers are only intended to drive specific brushless synchronous servomotors from Kollmorgen with closed-loop control of torque, speed, and position. The rated voltage of the motors must be at least as high as theDC-link voltage of the servo amplifier.• The servo amplifiers may only be operated in a closed switchgear cabinet, taking into account the ambient conditions defined in the environmental specifications.Kollmorgen guarantees the conformance of the servo amplifiers with the standards for industrial areas stated in this manual only if Danaher Motion Kollmorgen delivers the components (motors, cables, amplifiers etc).1.2.4 SoftwareWarrantyComputer software programs that may be included in material or Goods sold to Buyer have been designed to perform a given set of tasks as defined in the documentation provided and are offered AS IS. It is Buyer’s responsibility to determine if the features of the software programs are suitable for Buyer’s requirements and must confirm that the software programs operate correctly. Buyer understands that such software programs are of such complexity that they may have inherent defects and that Seller makes no warranty that all software features will perform correctly as supplied. For Seller’s software utilizing automation servers, improper reading and writing data to the automation server can cause the automation server software to malfunction and may cause the automation server and/or the program writing to the automation server to crash. Improperly reading and writing data to an automation server may cause the device controlled by that automation server to malfunction. Seller shall not be responsible for damage to any device or damage caused by any device due to the improper reading and/or writing of data to an automation server.1.2.5 Limitation of liabilityNOTWITHSTANDING ANYTHING TO THE CONTRARY, SELLER SHALL NOT BE LIABLE FOR ANY SPECIAL, INCIDENTAL, INDIRECT OR CONSEQUENTIAL DAMAGES INCLUDING LOST PROFITS ARISING OUT OF THE PERFORMANCE, DELAYED PERFORMANCE OR BREACH OF PERFORMANCE OF THIS ORDER REGARDLESS WHETHER SUCH LIABILITY BE CLAIMED IN CONTRACT, EQUITY, TORT OR OTHERWISE. SELLER’S OBLIGATION ISLIMITED SOLELY TO REPAIRING OR REPLACING (AT ITS OPTION AND AS SET FORTH IN SECTION 10 AND SECTION 11), AT ITS APPROVED REPAIR FACILITY, ANY GOODS OR PARTS WHICH PROVE TO SELLER’S SATISFACTION TO BE DEFECTIVE AS A RESULT OF DEFECTIVE MATERIALS OR WORKMANSHIP, IN ACCORDANCE WITH SELLER’S STATED WARRANTY. IN NO EVENT SHALL SELLER’S LIABILITY EXCEED THE TOTAL PURCHASE PRICE SET FORTH IN THIS ORDER.number1.3 Part1.4 Where to get supportDanaher Motion is committed to quality customer service. Our goal is to provide the customer with information and resources as soon as they are needed. In order to serve in the most effective way, contact your local sales representative for order status and delivery information, product information and literature, and application and field technical assistance. If you are unaware of your local sales representative, please contact us at:Email: sep@Specify “SynqNet Support” in the subject line.1.5 Manual Download LocationComplete product manuals can be downloaded from the Danaher Motion website, at -> Customized Products -> Drives -> CD SynqNet2. Unpacking and InspectionOpen the box and remove all the contents. Check to ensure there is no visible damage to any of the equipment.Electronic components in this amplifier are design-hardened to reduce static sensitivity. However, properprocedures should be used when handling to avoid damage to equipment.Remove all packing material and equipment from the shipping container. Be aware that some connector kits and other equipment pieces may be quite small and can be accidentally discarded if care is notobserved when unpacking the equipment. Do not dispose of shipping materials until the packing list hasbeen checked.Upon receipt of the equipment, inspect components to ensure that no damage has occurred in shipment. If damage is detected, notify the carrier immediately. Check all shipping material for connector kits, documentation, diskettes, CD-ROM, or other small pieces of equipment.3. Installation Instructions3.1 GeneralThese installation steps are designed to lead you through the proper installation and setup of a SERVOSTAR CD SynqNetsystem. They were developed with the assumption that you have a fundamental understanding of basic electronics, computers, mechanics, and proper safety practices. However, you do not have to be an expert in motion control to install and operate thedrive system. It is recommended that you read the entire manual completely before attempting installation or operation.High voltage can present dangerous and hazardous conditions if not performed by a qualified electrician. Be certain to follow all national and local codes during installation.1. Open the box(es) and remove all the contents. Check to ensure there is no visible damage to any of the equipment.2. Mount the SERVOSTAR CD SynqNet to the back panel. Refer to the appropriate Outline Dimensions in this manual. Metal-to-metal contact is important for electrical noise control!3. Wire the SERVOSTAR CD SYNQNET according to the appropriate System Wiring Diagram.4. Connect solid earth ground to frames of all components.5. Wire the main power (115/230 VAC). Wire the 24 volt supply to the connector at the top of the drive.6. Wire user I/O at connector C3: At a minimum, 24 volts must be brought in to the enable circuit. Be certain that connector C3 is inserted correctly.7. Wire the motor and feedback. Refer to the Feedback Wiring Diagram for additional information. 8. Wire Regen Resistor kit, if applicable. 9.Verify that all wiring is correct.10. Verify that earth grounds are connected. 11. Verify all electrical and safety codes are met.12. Connect the SynqNet cable between the Motion Controller and connector C4.3.2 GroundingSystem grounding is essential for proper performance of the drive system. A ground bus bar may be used as a single point ground for the system. Safety grounding should be provided to all pieces of the system from a “star point." In addition to the safety grounding, a high frequency ground must be provided that connects the back panel to the enclosure and, ultimately, to earth ground. The objective is to provide an extremely low impedance path between the filters, drives, power supplies, and earth ground. This high frequency ground is accomplished with the use of a flat braid or copper bus bar. It is important not to rely on a standard wire for the high frequency ground. In general, a wire has an inductance of 8nH-per-inch, regardless of diameter. At higher frequencies, this unwanted inductance between grounds equates to limited filter performance. When connecting high frequency grounds, use the shortest braid possible.3.3 BondingThe proper bonding of shielded cables is imperative for minimizing noise emissions and increasing immunity levels of the drive system. Its effect is to reduce the impedance between the cable shield and the back panel. Kollmorgen recommends that all shielded cables be bonded to the back panel.Power input wiring does not require shielding (screening) if the power is fed to the cabinet (enclosure) via metallized conduit. If metallized conduit is not implemented into the system, shielded cable is required on the power input wires and proper bonding technologies should be implemented.The motor and feedback cables should have the shield exposed as close to the drive as possible. This exposed shield is bonded to the back panel using either non-insulated metallic cable clamps or cable bonding clamps offered by Phoenix Contact (and others).3.4 CEFilteringThe SERVOSTAR drive system (drive, motor) has been designed to meet the CE standards. It is imperative for you to apply proper bonding and grounding techniques, described earlier in this section, when incorporating EMC noise filtering components for the purpose of meeting this standard.Noise currents often occur in two types. The first is conducted emissions that are passed through ground loops. The quality of the system grounding scheme inversely determines the noise amplitudes in the lines. These conducted emissions are of a common-mode nature from line to neutral (or ground). The second is radiated high-frequency emissions usually capacitively coupled from line-to-line and are differential in nature.To properly mount the filters, the enclosure should have an unpainted metallic surface. This allows for more surface area to be in contact with the filter housing and provides a lower impedance path between this housing and the back plane. The back panel, in turn, has a high frequency ground strap connection to the enclosure frame or earth ground.3.4.1 InputPowerThe Kollmorgen SERVOSTAR CD SynqNet electronic system components require EMI filtering in the input power leads to meet the conducted emission requirements for the industrial environment. This filtering blocks conducted-type emissions from exiting onto the power lines and provides a barrier for EMI on the power lines.Care must be taken to adequately size the system. The type of filter is based on the voltage and current rating of the system and whether the incoming line is single or three-phase. One input line filter is used for multi-axis control applications. These filters are mounted as close to the incoming power as possible so noise is not capacitively coupled into other signal leads and cables. Similarly, care should be taken when routing wires from the load side of the filter to the BUS Module. These lines may be noisy and should be separated from other sensitive cabling to avoid unwanted coupling of noise. Several manufacturers of these filters are listed below. They should be able to recommend the best filter design for most typical motor control applications. Kollmorgen has also provided specific filters recommendations that adequately attenuate the conducted noise to levels well below the CE limits. The implementation of the EMI filter should be done in accordance with the following guidelines: • Filter should be mounted on the same panel as the drive.• Filter should be mounted as close as possible to incoming cabinet power.• When mounting the filter to the panel, remove any paint or material covering. Use an unpainted metallic back panel, if possible.• Filters are provided with an earth connection. All ground connections are tied to ground.• Filters can produce high leakage currents. Filters must be earthed before connecting the supply!• Filters should not be touched for a period of 10 seconds after removing the supply.The following table shows recommended line filters:Drive Model # Recommended EMI Line FilterKollmorgen Part #Lx03 Filter Concepts SF7Schaffner FN258-7/07 n/aA-96776-001Lx06 Filter Concepts SF15Schaffner FN258-16/07 N/aA-96776-002Lx10 SchaffnerFN258-16/07A-96776-002 Lx20The filters called out in the table on the previous page are used on a one-to-one corresponedence withthe drive. If drives are paralled off one filter, it needs to be sized.Drives can be ganged off one EMI filter as shown in the Filter and Bonding Diagrams.3.4.2 Motor Line FilteringMotor filtering may not be necessary for CE compliance of SERVOSTAR systems. However, this additional filtering increasesthe reliability of the system. Poor non-metallic enclosure surfaces and lengthy, unbonded (or unshielded) motor cables thatcouple noise line-to-line (differential) are just some of the factors that lead to the necessity of motor lead filtering.Motor lead noise may be either common-mode or differential. The common-mode conducted currents occur between eachmotor lead and ground (line-to-neutral). Differential radiated currents exist from one motor lead to another (line-to-line). Thefiltering of the lines feeding the motor provide additional attenuation of noise currents that enter surrounding cables andequipment I/O ports in close proximity.Differential mode currents commonly occur with lengthy motor cables. As the cable length increases, so does its capacitanceand its ability to couple noise from line-to-line. While every final system is different and every application of the product causesa slightly different emission profile, it may become necessary to use differential mode chokes to provide additional noiseattenuation to minimize the radiated emissions. The use of a ferrite core (placed at the drive end) on each motor lead (shown inthe diagram below), attenuates differential mode noise and lower frequency (30-60 MHz) broadband emissions to withinspecifications. Kollmorgen recommends a Fair-Rite P/N 2643665702 (or equivalent) ferrite core. You should wrap each motorlead through the core several times, as shown in the next figure.Never wrap a ground lead through a core.To MotorCommon ModeFilteringDifferential Mode FilteringCommon mode currents occur from noise spikes created by the PWM switching frequency of the drive. The use of a ferrite or iron-powder core toroid, as shown in the figure above, places common mode impedance in the line between the motor and the drive. The use of a common mode choke on the motor leads may increase signal integrity of encoder outputs and associated I/O signals. The following is a list of toroidal and ferrite cores used to make common mode chokes:3.4.3 I/O FilteringI/O filtering, while not a necessity for CE compliance, may be desired (depending on system installation, application, andintegration with other equipment). It may be necessary to place ferrite cores on I/O lines to avoid unwanted signals entering and disturbing the drive system or other associated equipment. The following chart lists some ferrite parts that may be used for I/O filtering and noise attenuation. These parts are ideal for providing an in-line common mode impedance for I/O linesThe following figure illustrates the use of multiple turns through a clamp-on core. The more turns created, the more impedance is added to the line. Avoid putting the shield in a clamp-on core. It is undesirable to place an impedance inline with the shield. The use of ribbon cable may be common in many cabinets. Some ferrite clamps are designed just for ribbon cable use.4. WiringDiagram4.1 Wiring4.1.1 300V Model: 3A, 6A, 10AY4.1.2600V Model and 20A 300V ModelH I G H V O L T A G E M A Y E X I S T U P T O 5 M I N U T E SA F T E R I N P U T V O L T A G E I S R E M O V E D .Y R E F E R I N S T A L L A T I O N A N D T R O U B L E S H O O T I N GT O Q U A L I F I E D P E R S O N N E L O N L Y .(S4.2 ConnectorPin-Out4.2.1 C1:RS232Pin no Function Description Comments1 N.C.2 RxD Receive3 TxD Transmit4 N.C.5 DGND Ground Must be connected in order to equalizepotential between controller and drive.6 N.C.7 N.C.8 N.C.9 N.C.4.2.2 C2:FeedbackPin Resolver Encoder SineEncoder1 SineHigh A A2 SineLow /A /A3 Shield Shield Shield4 CosineHigh B B5 CosineLow /B /B6 Shield Shield Shield7 E5V Return E5V Return8 E5V Return E5V Return9 H1B EnDat/Data10 H2B EnDat/Clock11 H3B12 Shield Shield Shield13 Thermostat High Thermostat High Thermostat High14 Shield Shield Shield15 Ref. High Out Index Index16 Ref. Low Out /Index /Index17 Shield Shield Shield18 E5V Supply E5V Supply19 E5V Supply E5V Supply20 E5V Supply E5V Supply21 Shield Shield Shield22 H1A EnDatData23 H2A EnDatClock24 H3A25 Thermostat Low Thermostat Low Thermostat Low4.2.3 C3: Front-Panel I/OPin no Function Description Comments1 Shield Shield2 Analogin+3 Analogin-Differential analog input ±10Vdc4 AGND Analogground5 Fault relay Fault relay dry contact6 Fault relay Fault relay dry contact 1 AmpNo polarity7 CREF Common rail for Digital inputsand outputs8 Enable RemoteEnable Wired to DSP, sampled at 62.5µsec 9 CW Positivelimit 5-24V; Wired to SynqNet FPGA 10 CCW Negativelimit 5-24V; Wired to SynqNet FPGA 11 HOME Homeinput 5-24V; Wired to SynqNet FPGA12 Brake+ Brake relay positive terminal13 Brake- Brake relay negative terminal Dry-contact for brake control 1 Amp4.2.4 C4: SynqNet INPin no RJ45 In1 TD2+2 TVDD3 TD2-4 RD2+5 TVDD6 RD2-7 NC8 DGND4.2.5 C5: SynqNet OUTPin no RJ45 Out1 TD1+2 TVDD3 TD1-4 RD1+5 TVDD6 RD1-7 NC8 DGND4.2.6 ExtendedI/OPin no Function Description Comments1 Analogin+14 Analogin-Differential analog input ±10Vdc2 AGND Analogground15 IN4 Digital Input #4 5V – 24V, Bi- polarWired to SynqNet FPGA3 IN5 Digital Input #5 5V – 24V, Bi-polarWired to SynqNet FPGA16 IN6 Digital Input #6 5V – 24V, Bi- polarWired to SynqNet FPGA4 IN7 Digital Input #7 5V – 24V, Bi- polarWired to SynqNet FPGA17 Common IN4 to IN7 Common IN4 to IN7 Common for Inputs 4 to 75 IN8 Digital Input #8 5V – 24V, Bi- polarWired to SynqNet FPGA18 IN9 Digital Input #9 5V – 24V, Bi- polarWired to SynqNet FPGA6 IN10 Digital Input #10 5V – 24V, Bi- polarWired to SynqNet FPGA19 IN11 Digital Input #11 5V – 24V, Bi- polarWired to SynqNet FPGA7 Common IN8 to IN11 Common IN8 to IN11 Common for Inputs 8 to 1120 OUT2 Digital output #2 Open collectorWired to SynqNet FPGA8 OUT3 Digital output #3 Open collectorWired to SynqNet FPGA21 Out common 2 to 3 Out common 2 to 3 Common user ground for OUT2 and OUT39 OUT4 Digital output #4 Open collectorWired to SynqNet FPGA22 OUT5 Digital output #5 Open collectorWired to SynqNet FPGA10 Out common 4 to 5 Out common 4 to 5 Common user ground for OUT4 and OUT523 Diff_IO_1+ Differential RS422 I/O (high) 11 Diff_IO_1- Differential RS422 I/O (low) Direction (In or Out) programmable through SynqNet .24 Diff_IO_2+ Differential RS422 I/O (high) 12 Diff_IO_2- Differential RS422 I/O (low) Direction (In or Out) programmable through SynqNet .25 DIV_BY_N Fast output, used for Divide-by-Nsignal Open collector, with internal pull-up that may be dis-assembled.13 DGND Digital Ground The DGND is the common for the outputcollector of this output. The input stage DGNDat the user end has to be connected to thisDGND.4.2.7 C8: Secondary EncoderPin Function 1 A Input + (High) 2 A Input - (Low)3 DC Common4 B Input + (High)5 B Input - (Low)6 Shield Connection7 E5V Supply8 Index +9 Index -4.3Filtering and Bonding DiagramNote 5Bonding of motor cables. The use of armored (screened) motorcables bonded as close to the drive as possible are essential for CE compliance and stronglyrecommended to better the overall performance and reliability of the system.Note 6for CE compliance. As with the motor cables, the feedback cables should be bonded to the back panel. This bonding does twothings. First, it cuts down radiation from the drive, which may be in the form of high frequency energy resulting from internal processor clocks. Second, it providesimmunity for the drive. Since the feedback device is located internal to the motor, it is going to pick up some noise currents and transmit bonding directs the currents from the shield of the feedback cable to back panel ground. This reduces the amount of noise entering the drive.Note 7AC power lines that must be routed past other lines (such as motor cables or I/O lines) should cross at a 90º angle. This minimizes the coupling effect. Additionally, the power lines should be routed as close to the back panel aspossible. Any noise currents on the lines are capacitively coupled to the ground plane and not to other lines.Note 8Control (I/O) signals should be kept separate from all power and motor cables, if possible. Keep control wiring as short as possible and use screened wire. Bonding is also recommended but not required for CE compliance. A separation distance of 20 cm. (8 in.) is sufficient in most cases. Where control cables must cross power cables, they should cross at a 90ºangle.Note 9Motor cables and feedback cables exiting the cabinet going to the motor should be separated as much as possible. Ideally, the use of separate conduits provides good isolation, which can limit coupling of noise from motor to feedback cables.Note 1Input power enters enclosure from metal conduit. Thiseliminates the need for shielded input power cable.Note 2Single point ground. A bus bar (ground bus) is an excellent way to achieve this.Note 3High frequency ground between non-conductive back panel and enclosure. Also, a high frequency ground is required between the enclosure and earth ground.Note 4EMI filter grounding. Safetygrounds must be provided on the filters. Hazard potentials exist even when the power is off because of the capacitors internal to the filters.。
伺服电控报错代码
有故障代码Fault Code无故障代码No Fault Code无剪线No shearing-line.踩下脚踏板电机无任何反应No respond in motor when tread the pedals.电机转动时有异响There is abnormal sound when the motor works.脚踏板无高速Motor don’t accelerate when tread the pedals.显示屏无显示There is no display on the display.操作面板按键无反应No respond on buttons of the operation panel.开机无电无显示No power and no display when power on.开机机器自跑Motor works automatically when power on.没有自动倒缝NO automatic backstitch.“P”+“✄”进入检测模式,调整为P01,查看其数值是否在“250~380V”范围内Please press “P”+“✄”to enter the testing mode, switch to P01,then check whether the value is in the range of “250~380V”.请在关机状态下拔掉电机与伺服器的连接线,转动电机手轮,查看电机轮是否过重Please pull out the connecting line between motor and servo in the off state, then rotate the motor’s hand wheel to see whether the motor’s hand wheel is too heavy.您的电机已短路,请立即更换There are short circuits in your motor, please replace it immediately.您的电网不稳定造成伺服器无法正常工作。
伺服异常码

0(正常狀態)1硬件故障。
2硬件故障。
101運行期間PLC READY OFF 102驅動裝置READY OFF103運行期間測試模式故障104硬件行程極限(+)105硬件行程極限(–)106起動時停止信號ON107BUSY 期間READY OFF-> ON 201在OP 處起動203近點狗檢測時間故障204OP 檢測時間故障205停頓時間故障206計數方法位移量故障207OPR請求ON209OPR 重新起動不可能213ABS 傳送時間214ABS 傳送SUM300JOG 速度範圍之外301微動位移量出錯500非法條件數據編號501同時起動前出錯502非法數據編號503無命令速度504在線性位移量範圍之外506弧出錯大偏差507軟件行程極限+508軟件行程極限–514新的當前值範圍之外515新的當前值不可能516連續路徑控制不可能518在運行形式範圍之外519在插補軸BUSY時插補520單位組不相配521非法插補說明命令522命令速度設置出錯523插補模式出錯524控制系統設置出錯525分點設置出錯526終點設置出錯527圓心設置出錯530地址範圍之外532不能同時起動533條件數據出錯534特殊起動指令出錯535不能環形插補536M代碼ON 信號起動537PLC READY OFF起動538READY OFF 起動543起動點範圍之外544半徑範圍之外545控制系統 LOOP設置出錯546非法設置以度為單位的ABS 方向800保持出錯801閃存ROM 寫出錯802閃存ROM 和校驗出錯803I/O 復位804專用指令參數出錯805閃存ROM 寫次數出錯806專用指令I/F 出錯900在單位設置範圍之外901在每轉的脈衝數範圍之外902在每轉的位移量範圍之外903在單位放大倍率範圍之外904脈衝輸出模式出錯905旋轉方向設置出錯906在偏置速度範圍之外910在速度極限值範圍之外911在加速時間0 範圍之外912在減速時間0 範圍之外920反向間隙補償量出錯921軟件行程極限上限922軟件行程極限下限923軟件行程極限選擇924軟件行程極限有效/無效設置925命令到位寬度926非法轉矩極限設置值927M代碼ON 計時出錯928速度轉換模式出錯929插補速度指定方法930當前值更新請求出錯932手動脈衝發生器輸入模式出錯935速度-位置功能選擇出錯950加速時間1 設置出錯951加速時間2 設置出錯952加速時間3 設置出錯953減速時間1 設置出錯954減速時間2 設置出錯955減速時間3 設置出錯956JOG 速度极限值出错957JOG 加速時間選擇設置出錯958JOG 減速時間選擇設置出錯959加速/減速處理選擇設置出錯960S-形比率設置出錯961非法突然停止減速時間962停止組1 突然停止選擇出錯963停止組2 突然停止選擇出錯964停止組3 突然停止選擇出錯966在容許環形插補出錯寬度之外967外部命令功能選擇出錯980OPR 方法出錯981OPR 方向出錯982OP 地址設置出錯983OPR 速度出错984蠕動速度出錯985OPR 重試出錯990OPR 停頓時間出錯991近點狗ON 後的位移量設置出錯992OPR 加速時間選擇出錯993OPR 減速時間選擇出錯995OPR 轉矩極限值出錯996偏差計數器清零信號輸出時間設置出錯997OP 移動期間速度指定出錯。
伺服报警故障代码大全

伺服报警故障代码大全伺服系统是现代工业自动化生产中常见的一种控制系统,它通过对电机进行控制,实现对机械运动的精确控制。
然而,在使用伺服系统的过程中,我们有时会遇到各种报警故障代码,这些代码代表着不同的故障类型,需要我们及时排查和处理。
下面将为大家详细介绍一些常见的伺服报警故障代码,以便大家在实际工作中能够更好地应对这些问题。
1. E001,伺服系统过载报警。
当伺服系统负载过大时,会触发E001报警代码。
这时需要检查负载情况,可能需要重新调整负载参数或者更换合适的伺服系统。
2. E002,伺服系统过热报警。
当伺服系统工作时间过长或者环境温度过高时,会触发E002报警代码。
此时需要及时停机降温,或者加强散热措施,以确保伺服系统的正常工作。
3. E003,伺服系统电压过高或过低报警。
电压异常会导致伺服系统工作异常,触发E003报警代码。
这时需要检查电源电压情况,可能需要更换稳压器或者调整电源线路。
4. E004,伺服系统编码器故障报警。
编码器是伺服系统的重要传感器,一旦出现故障会触发E004报警代码。
此时需要检查编码器连接情况,可能需要更换或者维修编码器。
5. E005,伺服系统通信故障报警。
通信故障会导致伺服系统无法正常接收指令,触发E005报警代码。
这时需要检查通信线路和通信模块,可能需要重新连接或者更换通信设备。
6. E006,伺服系统电机故障报警。
电机是伺服系统的核心部件,一旦出现故障会触发E006报警代码。
此时需要检查电机连接情况和电机状态,可能需要更换或者维修电机。
7. E007,伺服系统位置偏差报警。
位置偏差会导致伺服系统无法精确定位,触发E007报警代码。
这时需要检查位置传感器和位置控制参数,可能需要重新校准或者调整位置控制系统。
以上是一些常见的伺服报警故障代码,我们在使用伺服系统时,要时刻关注系统的运行状态,及时处理各种报警故障,以确保系统的正常运行。
希望以上内容能够帮助大家更好地理解和应对伺服系统报警故障,提高工作效率和生产质量。
科尔摩根伺服报警代码中文

科尔摩根伺服报警代码中文科尔摩根伺服报警代码(中文)————————————————————————————————作者: ————————————————————————————————日期:错误编号名称说明E /P 状态信息通电状态正常... 状态信息放大器是更新启动配置- 状态信息编程模式- S -AS-Enable AS-Enable输入0VF01* 散热片温度散热片温度过高(默认:80°C)F02* 超压供电过压F03* 跟踪误差位置控制器F04 信息反馈线缆坏、短路、接地F05* 欠压供电低压F06 电机温度电机温度过高,或传感器故障F07 内部电压内部供应电压不行F08* 超速度电机速度过高,位置偏移F09 电可擦只读存储器自检错误F10 信号失灵保护信号失灵保护(线缆坏或接触不良)F11 制动器线缆坏、短路、接地F12电机相位电机位置丢失(线缆坏等)F13* 环境温度环境温度过高F14 输出级输出功率错误F15 I2t max.I2t超过最大值F16* 电源BTB/RTO 2或3个阶段没有供电F17 A / D转换器模数转换误差,造成极端的电磁干扰F18重新生成回复电路故障或不正确的设置F19* 直流母线连接直流母线连接故障F20 槽误差槽误差,取决于类型的扩充卡(见ASCII命令参考) F21 操纵错误处理扩充卡错误F22 保留的保留的F23 总线通讯关闭严重的CAN总线通信的错误F24警告显示警告故障F25 变换误差换码误差F26 限位开关硬件限制开关移动误差F27AS操作错误——AS-Enable输入,使已经确定在同一时间F28 现场总线错误现场总线错误(见ASCII命令参考)F29 现场总线错误现场总线通信干扰(见ASCII命令参考)F30 紧急暂停暂停,紧急停车F31 保留保留F32系统错误系统软件没有反应正确警告信息编号名称说明E/P状态信息通电状态正常. . . 状态信息放大器是更新启动配置- S-AS-Enable AS-Enable输入0V- 状态信息编程模式n01 I2t I2t临界值超过n02 回复电压达到预设电压n03* S_故障超过预置下的错误限制n04*响应监测响应监测(现场总线)已经启动n05 供应阶段供电相丢失n06* SW限制开关1通过软件限制开关1n07* SW限制开关2通过软件限制开关2n08 运动任务误差a faulty motiontask was startedn09 没有参考点no reference point(Home) set at start of motion taskn10* PSTOP PSTOP限位开关激活n11* NSTOP NSTOP限位开关激活n12 电机加载默认值只有ENDAT或HIPERFACE,差异电机数字保存在该编码器和放大器、电机负载默认值n13* 扩展卡24 V直流供电为I/O扩充卡不可以n14 SinCos反馈SinCos换向器(激发和运动)没有完成,将被取消当放大器被激活和激发和运震动进行了n15 保留保留n16 总结警告总结了n31到n17警告n17 现场总线的同步CAN同步没有登录n18 multiturn overflow max.超过电的机转数量n19 motion task rampsare limited在运动范围溢出任务数据n20 无效运动任务无效运动任务n21 PLC程序错误详情见可编程序控制器(PLC)的代码n22 max. motor temperaturreachedthe user can shut down theprocessbe fore thetemperatureeror will interrupt the proces simmediatel yn23SinCos反馈到达警告等级n24 数字I /O配置不合乎逻辑n25-n31保留保留n32 固件版本固件版本是一个n故障错误诠释显示意义可能原因措施/解释HMI(人机界面)消息:通信故障电缆使用错误使用null-modem电缆伺服放大器或PC上电缆插错位置正确的插伺服放大器和PC电缆插头错误的PC接口选择选择正确的界面F01* 散热片温度散热片温度过高调整系统设置温度(80)或降低环境温度放大器过脏检查/吹出通风槽。
科尔摩根伺服报警代码(中文)
保留
保留
n16
总结警告
总结了n31到n17警告
n17
现场总线的同步
CAN同步没有登录
n18
multiturn overflow
max.超过电的机转数量
n19
motion task ramps are limited
在运动范围溢出任务数据
n20
无效运动任务
无效运动任务
n21
PLC程序错误
详情见可编程序控制器(PLC)的代码
F30
紧急暂停
暂停,紧急停车
F31
保留
保留
F32
系统错误
系统软件没有反应正确
警告信息
编号
名称
说明
E / P
状态信息
通电状态正常
. . .
状态信息
放大器是更新启动配置
- S -
AS-Enable
AS-Enable输入0V
-
状态信息
编程模式
n01
I²t
I²t临界值超过
n02
回复电压
达到预设电压
n03*
S_故障
检查接触器
I安装电机接触器具有燔接触。
检查接触器
硬件故障
伺服放大器制造商进行维修
电机连接器或马达伺服放大器没有开机
检测插座
F13*
环境温度7)
到伺服放大器制造商进行维修
截止阈值过低
IncreaseTEMPE
开关柜太热了
使用一个冷却装置
F14
输出级
温度传感器故障
测量传感器电阻。
开关:
低温:开关关闭
高温:开关打开。
PTC热敏电阻器:
伺服驱动器报警代码的含义解析
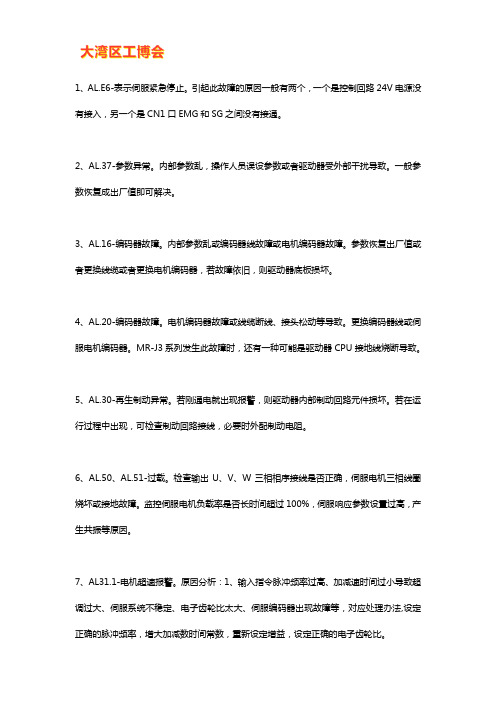
1、AL.E6-表示伺服紧急停止。
引起此故障的原因一般有两个,一个是控制回路24V电源没有接入,另一个是CN1口EMG和SG之间没有接通。
2、AL.37-参数异常。
内部参数乱,操作人员误设参数或者驱动器受外部干扰导致。
一般参数恢复成出厂值即可解决。
3、AL.16-编码器故障。
内部参数乱或编码器线故障或电机编码器故障。
参数恢复出厂值或者更换线缆或者更换电机编码器,若故障依旧,则驱动器底板损坏。
4、AL.20-编码器故障。
电机编码器故障或线缆断线、接头松动等导致。
更换编码器线或伺服电机编码器。
MR-J3系列发生此故障时,还有一种可能是驱动器CPU接地线烧断导致。
5、AL.30-再生制动异常。
若刚通电就出现报警,则驱动器内部制动回路元件损坏。
若在运行过程中出现,可检查制动回路接线,必要时外配制动电阻。
6、AL.50、AL.51-过载。
检查输出U、V、W三相相序接线是否正确,伺服电机三相线圈烧坏或接地故障。
监控伺服电机负载率是否长时间超过100%,伺服响应参数设置过高,产生共振等原因。
7、AL31.1-电机超速报警。
原因分析:1、输入指令脉冲频率过高、加减速时间过小导致超调过大、伺服系统不稳定、电子齿轮比太大、伺服编码器出现故障等,对应处理办法,设定正确的脉冲频率,增大加减数时间常数,重新设定增益,设定正确的电子齿轮比。
8、ALE6.1-伺服驱动器报警代码。
原因分析:是伺服电机紧急停止了,伺服驱动器EMG和SG之间的线路断开了。
对应处理办法,把EMG短接就好了。
9、AL52-故障为偏差计数器中的滞留脉冲超出了伺服编码器分辨率的能力乘以10。
原因分析:是加减速时间常数的大小设置不合理,转矩限制值太小,由于电源电压下降,导致电机转矩不足,伺服电机不能启动。
对应处理办法:设定正确的加减速时间常数,增大转矩限制值等。
伺服报警故障代码大全
伺服报警故障代码大全伺服系统在工业自动化领域中扮演着非常重要的角色,它能够提供精准的位置控制和运动控制,从而实现自动化生产线的高效运行。
然而,在使用伺服系统的过程中,难免会遇到各种故障问题,其中报警故障代码是比较常见的一种。
本文将为大家详细介绍伺服系统常见的报警故障代码,以便大家在实际应用中能够快速准确地进行故障排除。
1. E001,过载报警。
当伺服系统承受超出其额定负载能力的负载时,会产生过载报警。
这可能是由于负载过大或者机械传动系统出现故障导致的。
在遇到这种情况时,需要及时停机检查,排除故障后重新启动。
2. E002,过压报警。
过压报警通常是由于电源系统出现问题,导致伺服系统输入电压超出规定范围而产生的。
解决方法是检查电源系统,确保输入电压稳定在规定范围内,必要时更换电源设备。
3. E003,过热报警。
伺服系统在长时间高负载运行或者环境温度过高的情况下,可能会出现过热报警。
这时需要停机降温,同时检查散热系统是否正常运行,确保散热效果良好。
4. E004,编码器故障。
编码器是伺服系统中非常重要的部件,它负责反馈电机的位置信息。
当编码器出现故障时,会导致伺服系统无法准确控制电机位置,从而产生E004报警。
解决方法是检查编码器连接是否良好,必要时更换故障编码器。
5. E005,通信故障。
伺服系统与上位机或者其他设备之间的通信出现故障时,会产生E005报警。
这时需要检查通信线路是否正常,确认通信协议设置是否正确,保证通信畅通。
6. E006,电机故障。
电机本身出现故障也会导致伺服系统报警,通常是由于电机绕组短路或者接线不良导致的。
解决方法是检查电机绕组和接线,必要时更换故障电机。
7. E007,系统故障。
除了以上列举的几种常见故障外,伺服系统还可能因为其他原因产生系统故障报警。
这时需要通过系统故障代码手册或者厂家技术支持进行详细排查,找出故障原因并进行修复。
总结,伺服系统报警故障代码的出现意味着系统出现了异常情况,需要及时处理以避免对生产造成影响。
伺服驱动器故障代码
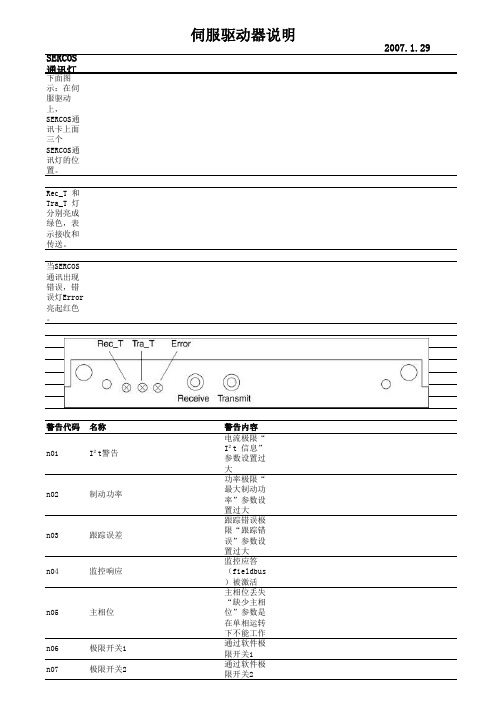
SERCOS通讯灯下面图示:在伺服驱动上,SERCOS通讯卡上面三个SERCOS通讯灯的位置。
Rec_T 和Tra_T 灯分别亮成绿色,表示接收和传送。
当SERCOS通讯出现错误,错误灯Error亮起红色。
警告代码名称警告内容n01I²t警告电流极限“I²t 信息”参数设置过大n02制动功率功率极限“最大制动功率”参数设置过大n03跟踪误差跟踪错误极限“跟踪错误”参数设置过大n04监控响应监控应答(fieldbus )被激活n05主相位主相位丢失“缺少主相位”参数是在单相运转下不能工作n06极限开关1通过软件极限开关1n07极限开关2通过软件极限开关22007.1.29伺服驱动器说明n08伺服任务错误一个错误的伺服任务启动n09无“HOME”参考点伺服程序在没有设置“HOME”参照点的情况下启动n10正极限正极限开关激活n11负极限负极限开关激活n12默认值只对于“HIPERFACE ”电机默认值被装载n13SERCOS接口SERCOS接口没正确连接n14HIPERFACE参考模式当HIPERFACE参考模式激活时尝试复位n15表格错误速度电流表格“INXMODE 35”错误n16...n31保留保留n32硬件测试版本硬件不是一个公开的测试版本A复位数字输入X 的“DIGITAL IN x”复位被激活警告代码错误内容发生原因及纠正错误F01驱动器热接收器过热1.改善通风2.减少motion工作循环F02直流电压超极限1.检查参数“主电源电压”的电流设定2.电源电压太高,使用调压器3.制动功率极限超范围,调整伺服或安装大制动电阻器F03跟踪错误超过极限1.增加Irms或 Ipeak峰值(保持在电机使用范围内)2.SW 斜坡参数设置太大F04反馈信号错误或不正确1.反馈装置有缺陷2.检查“反馈类型”参3.检查反馈线缆和连接F05直流电压比工厂预设值(100V)低F06电机过热1.Irms 或Ipeak 设置2.电机缺陷3.如果电机不热,检查反馈电缆和连接4.减小伺服工作循环5改善电机通风F07内部24V故障退还厂家F08电机速度超过极限1.没正确设置反馈参数2.反馈线不正确3.电机相位接反4.检查“Overspeed”过速度参数正确设置F09只读存储器校验错误退回厂家F10闪存检查错误退回厂家F11电机制动故障1.当制动不存在,制动参数设置为“WITH”2.抱闸有缺陷3.检查电机电源线和接线F12电机相位错误1.电机有缺陷2.检查电机电源线和接线F13驱动器内部温度超级限1.改善通风2.减少伺服工作循环F14驱动器输出使用故障1.检查电机线缆是否损坏或短接2.输出模块过热,改善通风3.内部制动电阻器电路短路或故障当驱动器使能时,没有电或电压太低。
伺服器报警代码

第10章维护、检查10.1 异常诊断与处理措施 - - - - - - - - - - - - - - - - - - - - - -10-210.1.1 面板操作器的状态显示- - - - - - - - - - - - - - - - - - - - - - - - - - 10-210.1.2 警报显示一览- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 10-310.1.3 警告显示一览- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 10-610.1.4 警报/警告显示的原因与处理措施- - - - - - - - - - - - - - - - - - - - - 10-710.1.5 其他不良状况的原因与处理措施- - - - - - - - - - - - - - - - - - - - - -10-1910.2 伺服驱动的维护与检修 - - - - - - - - - - - - - - - - - - - - 10-2210.2.1 伺服电机的检修- - - - - - - - - - - - - - - - - - - - - - - - - - - - -10-2210.2.2 伺服单元的检修- - - - - - - - - - - - - - - - - - - - - - - - - - - - -10-2210.2.3 伺服单元内部部件更换的大致标准- - - - - - - - - - - - - - - - - - - - -10-2210第10章 维护、检查10.1.1 面板操作器的状态显示10.1 异常诊断与处理措施10.1.1 面板操作器的状态显示(1)位数据的显示内容(2)警报、警告的显示在SERVOPACK(伺服单元)前面的面板显示器中,一个字一个字的显示警报、警告的编码,如下所示。
科尔摩根 Servostar 系列伺服故障代码表
S—故障
超过预设置的位置错误限
n04
响应监控
响应监控(总线)处于激活
n05
供电相位
主干线供电相位太弱
n06
SW限位开关1
低于软件限位开关1
n07
SW限位开关2
超过软件限位开关2
n08
动作任务错误
执行了一个错误动作任务
n09
没有参考点
在动作任务时(HOME设置不对)没有参考点
n10
PSTOP
PSTOP正极限限位开关激活
在温度误差被排除之前可以关闭后再检查
n23-n31
保留
?
n32
硬件测试版本
未发布版本
?
?
警告信息:?
已经发生、但不会引起放大器输出级关闭的故障(BTB/RTO 触点保持闭合),在前面板 LED 显示屏上以警告代码的形式显示。?
E.S.A.P
状态信息
状态信息,没错误,看第88页
. . .
状态信息
更新启动配置.状态信息编程模式n01
负载特性
负载接近临界值
n02
制动功率
达到预设置的制动功率限
E\S\A\P
状态信息
状态信息,没错误,看第88页
. . .
状态信息
更新启动配置
-
状态信息
编程模式
F01*
散热片温度
散热片温度太高,由制造商限制在80度
F02*
过电压
直流总线过压,主要取决电源电压
F03*
跟踪错误
信息来源于位置控制器
F04
反馈电缆
电缆断裂,短路,接地
F05*
欠压
直流总线欠压,由制造商限制在100V
伺服常见报警处理

---------------------------------------------------------------最新资料推荐------------------------------------------------------伺服常见报警处理常见报警处理方法 27 号报警(编码器 U、 V、 W 信号错误报警)发生原因:检测出的编码器 U、 V、 W 信号无效,同时为 0 或同时为 1 。
处理办法:1 . 查看编码器线是否固定牢固。
编码器线与电机连接处或 CN3 端口处连接是否松弛。
如有松弛将其固定牢固,重新上电就可消除 27 号报警。
2. 查看编码器信号是否连接正确,检查编码器各个信号是否连接到对应的端口上。
如发现有信号接错,则需重新接编码器线。
待接好后重新上电就可消除 27 号报警。
3. 查看编码器状态 dp20,看数码管三段是否会出现同时亮,如有出现同时亮的情况,则说明电机编码器有问题,更换电机。
4. 如上面方法都不能消除 27 号报警,则更换编码器线再试,如还不行,则有可能是伺服驱动器出现问题。
先更换伺服驱动器后再试,看是否可以消除 27 号报警。
30 号报警(电机失速报警)发生原因:定子速度长时间跟不上设定转速。
处理方法:1 . 检查伺服电机动力线 U、 V、 W 相序是否连接正确,是1 / 11否把电机动力线端子 U 相错误的连接到驱动器V 相端子上了,如U、 V、 W 相序接错,再运行时则会出现 30 号报警。
2. 检查电机负载机械部分是否卡死。
3. 检查驱动器各个连接端口是否连接正确。
查看驱动器端子 L1 、 L2、 R、 S、 T、 U、 V、 W 是否连接到对应的端口上。
4. 查看电机实际负载是否超过电机额定负载。
5. 把电机动力线线从驱动器取下,用万用表测 U-V、 V-W、U-W 两两之间阻抗,若阻值范围 5 欧以内, 且三组数据大概相等,则说明电机绕组没问题(若阻值异常,则电机绕组可能有问题)。
伺服器报警代码
第10章维护、检查10.1 异常诊断与处理措施 - - - - - - - - - - - - - - - - - - - - - -10-210.1.1 面板操作器的状态显示- - - - - - - - - - - - - - - - - - - - - - - - - - 10-210.1.2 警报显示一览- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 10-310.1.3 警告显示一览- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 10-610.1.4 警报/警告显示的原因与处理措施- - - - - - - - - - - - - - - - - - - - - 10-710.1.5 其他不良状况的原因与处理措施- - - - - - - - - - - - - - - - - - - - - -10-1910.2 伺服驱动的维护与检修 - - - - - - - - - - - - - - - - - - - - 10-2210.2.1 伺服电机的检修- - - - - - - - - - - - - - - - - - - - - - - - - - - - -10-2210.2.2 伺服单元的检修- - - - - - - - - - - - - - - - - - - - - - - - - - - - -10-2210.2.3 伺服单元内部部件更换的大致标准- - - - - - - - - - - - - - - - - - - - -10-2210第10章 维护、检查10.1.1 面板操作器的状态显示10.1 异常诊断与处理措施10.1.1 面板操作器的状态显示(1)位数据的显示内容(2)警报、警告的显示在SERVOPACK(伺服单元)前面的面板显示器中,一个字一个字的显示警报、警告的编码,如下所示。
KollmorgenS300报警信息及处理

KollmorgenS300报警信息及处理S300伺服驱动器错误及报警信息一览表一、状态信息1 E/P 状态信息,不是错误2 ... 状态信息,驱动器正在更新启动配置3 - 状态信息,不是错误,编程模式4 -S- 安全使能没有接(只是驱动器去使能)二、错误信息任何错误发生后都会以编码形式用LED在前面板上显示一个错误代码。
所以错误信息都会导致BTB/RTO开路,电流输出断开(电机失去所有转矩),并且抱闸被激活。
序号故障代码代码解析1 F01* 散热器温度过高(缺省: 80°C)2 F02* 过压。
直流母线电压过压,依赖于供电电压3 F03* 跟随的错误信息是从位置控制器过来的4 F04 反馈线断,线间短路,对地短路5 F05* 欠压,直流母线欠压(缺省: 100 V)6 F06* 电机温度过高或者温度传感器坏7 F07 内部供电电压故障8 F08* 超速,电机飞车或速度过高9 F09 EEPROM校验错误10 F10 X5反馈的信号错误(电缆断或者类似原因)11 F11 抱闸电缆断,线间短路,对地短路12 F12 电机缺相(电机电缆断或者类似原因)13 F13* 环境温度太高14 F14 驱动器功率输出错误(驱动器到电机的输出)15 F15 I2t 达到最大值16 F16* 供电电源缺相17 F17 模数转换,模拟量-数字量转换错误,通常由外部电磁干扰引起18 F18 再生回路错误或不正确的设置19 F19* 直流母线断20 F20 插槽错误,取决于扩展卡(详见ASCII对象说明)21 F21 扩展卡处理错误22 F23 CAN总线通讯错误23 F25 换向错误24 F26 硬件限位开关错误或零位移动25 F27 安全使能输入错误(安全使能和使能同时有效)26 F28 现场总线错误(详见ASCII对象说明)27 F29 现场总线错误(详见ASCII对象说明)28 F30 急停超时29 F32 系统错误,系统软件反应不正确“*”表示这些错误不用重启就可以通过命令终端发送ASCII命令“CLRFAULT”(或者清除错误按钮)清除。
科尔摩根 Servostar 600系列伺服故障代码表
超过预设置的位置错误限
n04
响应监控
响应监控(总线)处于激活
n05
供电相位
主干线供电相位太弱
n06
SW限位开关1
低于软件限位开关1
n07
SW限位开关2
超过软件限位开关2
n08
动作任务错误
执行了一个错误动作任务
n09
没有参考点
在动作任务时(HOME设置不对)没有参考点
n10
PSTOP
PSTOP正极限限位开关激活
F06
电机温度
电机温度太高或者温度传感器误差,由制造商限制限定在145度
F07
内部电压
内部放大器供电超公差
F08*
超速
电机位置偏离,速度太快
F09
可擦存储器
自检错误
F10
闪存
自检错误
F11
制动(电机)
电缆断裂,短路,接地
F12
电机相位
电机相位错位(电缆断或者类似故障)
F13*
内部温度
内部温度太高
F14
在温度误差被排除之前可以关闭后再检查
n23-n31
保留
n32
硬件测试版本
未发布版本
科尔摩根Servostar 600系列伺服故障代码表
2016年04月10日
Kollmorgen Servostar 601-620系列伺服驱动器故障信息表:
出错信息:
任何出现的错误都以一个错误代码的形式在前面板上的LED显示屏上显示。所有错误消息都会导致BTB/RTO触点打开,放大器的输出级关闭(电机失去全部转矩)。电机抱闸被激活。
警告信息:
已经发生、但不会引起放大器输出级关闭的故障(BTB/RTO 触点保持闭合),在前面板 LED 显示屏上以警告代码的形式显示。
伺服故障报警及处理方法
伺服故障报警及处理方法AL、10 电压过低电源电压太低。
MR-E-□A:160V 以下AL、12 存储器异常1 RAM存储器异常AL、13 时钟异常印刷电路板的异常AL、15 存储器异常2 EEP-ROM异常AL、16 编码器异常1 编码器与伺服放大器之间通讯异常。
AL、17 电路板异常2 CPU·零部件异常AL、19 存储器异AL、1A 电机配合异常伺服放大器与伺服电机之间的配合有误。
AL、20 编码器异常2 编码器与伺服放大器之间通讯异常。
AL、24 主电路异常伺服放大器的伺服电机输出端(U·V·W相)接地故障。
AL、30 再生制动异常制动电流超过内置再生制动电阻或再生制动选件的允许值。
再生制动晶体管异常AL、31 超速转速超出了瞬时允许转速。
AL、32 过流伺服放大器的输出电流超过了允许电流。
AL、33 过压直流母线电压的输入在400V以上。
AL、35 指令脉冲频率异常输入的指令脉冲的脉冲频率太高。
AL、37 参数异常参数的设定值异常。
AL、45 主电路芯子过热主电路异常过热。
AL、46 伺服电机过热伺服电机的温度上升,热保护继电器动作。
AL、50 过载1 超过了伺服放大器的过载能力。
负载率300%:2、5s以上负载率200%:100s 以上AL、51 过载2 由于机械故障导致伺服放大器连续数秒钟以最大输出电流输出。
伺服电机的锁定时间:1s以上AL、52 误差过大偏差计数器的滞留脉冲超过编码器的分辨率×10[pulse]。
AL、8A 串行通讯超时 RS-232C通讯的时间超过参数No、56的设定值。
AL、8E 串行通讯异常伺服放大器与通讯设备(计算机等)之间出现串行通讯错误。
CPU·部件异常AL、E0 再生制动电流过大警告可能会超出内置再生制动电阻或外部再生制动选件的制动能力。
AL、E1 过载警告可能发生过载1,过载2报警。
AL、E6 伺服紧急停止警告 EMG-SG之间断开。
科尔摩根Servosr系列伺服故障代码表
科尔摩根Servostar 600系列伺服故障代码表
2016年04月10日
Kollmorgen Servostar 601-620系列伺服驱动器故障信息表:
出错信息:
任何出现的错误都以一个错误代码的形式在前面板上的LED显示屏上显示。所有错误消息都会导致BTB/RTO触点打开,放大器的输出级关闭(电机失去全部转矩)。电机抱闸被激活。
S—故障
超过预设置的位置错误限
n04
响应监控
响应监控(总线)处于激活
n05
供电相位
主干线供电相位太弱
n06
SW限位开关1
低于软件限位开关1
n07
SW限位开关2
超过软件限位开关2
n08
动作任务错误
执行了一个错误动作任务
n09
没有参考点
在动作任务时(HOME设置不对)没有参考点
n10
PSTOP
PSTOP正极限限位开关激活
n11
PSTOP
NSTOP负极限限位开关激活
n12
载入电机默认值
针对编码器的:在编码器与驱动器里保存的电机号码不同时,载入电机的默认值
n13
插槽警告
I∕O扩展板24V供电太弱
n14
正余弦反馈
在驱动器使能、激发、运动时,正余弦换向(激发和运动)没执行,会使正余弦反馈被取消
n15
对应表错误
速度与电流的对应关系错误
警告信息:
已经发生、但不会引起放大器输出级关闭的故障(BTB/RTO 触点保持闭合),在前面板 LED 显示屏上以警告代码的形式显示。
E.S.A.P
状态信息
状态信息,没错误,看第88页
伺服驱动器故障代码
伺服驱动器故障代码安川伺服驱动器维修经验总结1、示波器检查驱动器的电流监控输出端时,发现它全为噪声,无法读出;故障原因:电流监控输出端没有与交流电源相隔离(变压器)。
处理方法:可以用直流电压表检测观察。
2、电机在一个方向上比另一个方向跑得快;(1)故障原因:无刷电机的相位搞错。
处理方法:检测或查出正确的相位。
(2)故障原因:在不用于测试时,测试/偏差开关打在测试位置。
处理方法:将测试/偏差开关打在偏差位置。
(3)故障原因:偏差电位器位置不正确。
处理方法:重新设定。
3、电机失速;(1)故障原因:速度反馈的极性搞错。
处理方法:可以尝试以下方法。
a. 如果可能,将位置反馈极性开关打到另一位置。
(某些驱动器上可以)b. 如使用测速机,将驱动器上的TACH+和TACH-对调接入。
c. 如使用编码器,将驱动器上的ENC A和ENC B对调接入。
d. 如在HALL速度模式下,将驱动器上的HALL-1和HALL-3对调,再将Motor-A和Motor-B对调接好。
(2)故障原因:编码器速度反馈时,编码器电源失电。
处理方法:检查连接5V编码器电源。
确保该电源能提供足够的电流。
如使用外部电源,确保该电压是对驱动器信号地的。
4、LED灯是绿的,但是电机不动;(1)故障原因:一个或多个方向的电机禁止动作。
处理方法:检查+INHIBIT 和–INHIBIT 端口。
(2)故障原因:命令信号不是对驱动器信号地的。
处理方法:将命令信号地和驱动器信号地相连。
5、上电后,驱动器的LED灯不亮;故障原因:供电电压太低,小于最小电压值要求。
处理方法:检查并提高供电电压。
6、当电机转动时,LED灯闪烁;(1)故障原因:HALL相位错误。
处理方法:检查电机相位设定开关(60°/120°)是否正确。
多数无刷电机都是120°相差。
(2)故障原因:HALL传感器故障处理方法:当电机转动时检测Hall A,Hall B,Hall C的电压。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
欠压
供电低压
F06
电机温度
电机温度过高,或传感器故障
F07
内部电压
内部供应电压不行
F08*
超速度
电机速度过高,位置偏移
F09
电可擦只读存储器
自检错误
F10
信号失灵保护
信号失灵保护(线缆坏或接触不良)
F11
制动器
线缆坏、短路、接地
F12
电机相位
电机位置丢失(线缆坏等)
F13*
环境温度
环境温度过高
制动坡道太短
延长制动坡道对速度环屏幕页面
直流母线不与其它放大器
在多个放大器来自同一个位置,连直流环节(见产品手册)
F03*
下面的错误信息的位置控制器(OPMODE 5或6只)
轴机械紧或阻断
机械检查系统
坡道设置扭矩不足
Travel along flatter ramps (ACC,DEC)
坡道在位置控制器、速度控制器超过坡道
硬件故障
到伺服放大器制造商进行维修
反馈系统与过量的功率现状。
ContactCustomer Support
F08*
超速行驶
速度超过允许的极限
检查VOSPD(极限速度)和提高它,如果必要的。
速度超过允许的极限
减少overswing通过指定放大参数
固件版本
固件版本是一个n
故障
错误诠释
显示
意义
可能原因
措施/解释
HMI(人机界面)消息:
通信故障
电缆使用错误
使用null-modem电缆
伺服放大器或PC上电缆插错位置
正确的插伺服放大器和PC电缆插头
错误的PC接口选择
选择正确的பைடு நூலகம்面
F01*
散热片温度
散热片温度过高
调整系统设置温度(80)或降低环境温度
放大器过脏
在速度控制器降低加速斜坡(ACC)和制动斜坡(DEC)
放大设定得太低。轴不够力,
调整放大。速度环和位置环
放大定的太高了。轴振荡.
调整放大。速度环和位置环可能,屏幕页面,插入一个过滤器
IPEAK(最大电流)太低了
扩大了下面的错误窗口(屏幕上的位置数据页)或使用一个更大的放大器/电机,增加IPEAK
F04
科尔摩根伺服报警代码(中文)
错误
编号
名称
说明
E / P
状态信息
通电状态正常
. . .
状态信息
放大器是更新启动配置
-
状态信息
编程模式
- S -
AS-Enable
AS-Enable输入0V
F01*
散热片温度
散热片温度过高(默认:80°C)
F02*
超压
供电过压
F03*
跟踪误差
位置控制器
F04
信息反馈
线缆坏、短路、接地
F21
操纵错误
处理扩充卡错误
F22
保留的
保留的
F23
总线通讯关闭
严重的CAN总线通信的错误
F24
警告
显示警告故障
F25
变换误差
换码误差
F26
限位开关
硬件限制开关移动误差
n20
无效运动任务
无效运动任务
n21
PLC程序错误
详情见可编程序控制器(PLC)的代码
n22
max. motortemperatur reached
紧急停止已经切断电源电压
操作员信息
VBUSMIN参数集太低了
调整参数,例如在48 v直流应用.
The monitor has to be switched off in some applications withUVLTMODE
例如:定位轴的水管的事件失败.
F06
电机温度
电机过热
不正确的运动参数和冷却
检查/吹出通风槽。使用空气过滤器。
风扇的缺陷/没有通电
检查空气流量/风扇的噪音;如果有瑕疵,送功放制造商进行维修.
MAXTEMPH太小了
范围20 . .85°C,默认80°C
由于受限制的安装没有空气流动
更换开关柜。安装一台空调
硬件故障
送伺服放大器制造商进行维修
F02*
在直流母线过电压的链接
设置电源电压
温度传感器故障
测量传感器电阻。
开关:
低温:开关关闭
高温:开关打开。
PTC热敏电阻器:
低温:低阻
高温:高阻
连接反馈单元松或反馈电缆断了
连接器和电缆控制
电机没有温度传感器
安装的一个温度传感器
截止阈温度传感器是设定得太低
Set theMAXTEMPMparameter (to the cutoff threshold, see parameter description)
反馈
短路、短到地面
检查反馈电缆
编码器有问题
更换编码器/电机
连接器触点不可以
检查接触
错误反馈组
参考FBTYPE
不正确的/有缺陷的反馈电缆
检查电缆(特别是关键性的电缆跟踪装置)
不相容的反馈
参考FBTYPE
屏蔽电缆坏
使用合适的电缆(见产品手册)
反馈电缆太短
允许电缆长度(见产品手册)
耦合故障信号
检查屏蔽、确保符合最小间距电力电缆、信号连接(见产品手册)
放大器有缺陷的
温度与测试旋转或SinCos接口
没用的恒温开关/元素
ContactCustomer Support
F07
内部电压故障
外部短路和过载在电源电压
断开所有的连接器除了24 V和检查是否发生错误地,当你打开
24 V放大器的逻辑
使用稳定24V电压
电机制动与过量的功率现状.
坚持最大电机制动电流(见产品说明书);提供制动与外部电压.
F05*
欠压
电源接触器没连接
接线/紧急停止/控制逻辑/ ...
连接线顺序不对
First of all switch on the power contactor which is connected via the BTB contact. Then switch the enable signal on approx. 0.5s later
the user can shut down the process before the temperature eror will interrupt the process immediately
n23
Sin Cos反馈
到达警告等级
n24
数字I / O
配置不合乎逻辑
n25-n31
保留
保留
n32
F14
输出级
输出功率错误
F15
I²t max.
I²t超过最大值
F16*
电源BTB/RTO
2或3个阶段没有供电
F17
A / D转换器
模数转换误差,造成极端的电磁干扰
F18
重新生成
回复电路故障或不正确的设置
F19*
直流母线连接
直流母线连接故障
F20
槽误差
槽误差,取决于类型的扩充卡(见ASCII命令参考)
反馈电压过高
“n02“预先显示。可能使用外部制动电阻,或者在多个放大器,连直流环节。
电压设定太低
基本设置屏幕页面设置正确的电源电压
电阻不匹配
基本设置屏幕上把细节内部或外部制动电阻的正确的页
电阻有线不正确的
检查电线(见产品手册)。内部制动电阻桥必须出席于连接器!外部制动电阻桥必须去掉连接头
电阻缺陷
更换保险丝