第三章-2惯性量的测量全解
大学物理.第三章.刚体的转动

和角速度 .
解 细杆受重力和
铰链对细杆的约束力
FN
作用 3g sin
2l
3g (1 cos )
l
§3-4 力矩的功 定轴转动的动能定理
一、力矩的功
z
O
d r
速度ω 绕端点转动,摩擦系数为μ 求M摩擦力。
ω
解: 质量线密度:
m L
dm
r dr
质量元:
r dm dr
所受摩擦力为:
dF gdm gdr
例3-5 现有一圆盘在平面内以角速度ω 转动,求 摩擦力产生的力矩(μ 、m、R)。
dr
ωr
解:
dm ds rdrd dF gdm grdrd dM1 rdF r2gdrd
I mi ri2 -质量不连续分布
i
r 2dm -质量连续分布
d -线分布λ=m/ι 质量元: dm ds -面分布σ=m/S
dV -体分布ρ=m/V
二、决定转动惯量的三因素
1)刚体的质量; 2)刚体的质量分布; (如圆 环与圆盘的不同);
3)刚体转轴的位置。 (如细棒绕中心、绕一端)
运动。 一、何谓刚体
在任何情况下形状和大小都不发生变化的
物体。即每个质元之间的距离无论运动或
受外力时都保持不变。
理想模型
ri j c mj
二、刚体运动的两种基本形式 mi
平动----刚体运动时,刚体内任一直线恒保 持平行的运动(即该直线方向保持不变)
刚体的平动过程
c a b
刚体的平动过程
能运用以上规律分析和解决包括 质点和刚体的简单系统的力学问题.
惯性质量的测量实验报告

惯性质量的测量实验报告惯性质量的测量实验报告引言惯性质量是物体所具有的抗拒外力改变其运动状态的性质。
在物理学中,测量物体的质量是一个基本实验。
然而,传统的质量测量方法常常受到外界因素的干扰,导致结果的不准确。
为了解决这个问题,本实验设计了一种新的方法,旨在准确测量物体的惯性质量。
实验设备和步骤本实验所使用的设备包括一个特制的测量平台、一台高精度的电子天平和一根细线。
首先,将测量平台放置在水平台面上,并确保其稳定性。
然后,将待测物体放置在测量平台上,并用细线将其固定。
接下来,使用电子天平测量物体的质量,并记录下结果。
实验原理本实验的关键在于利用物体的惯性质量来测量其真实质量。
当物体受到外力作用时,由于其惯性,物体会产生相应的加速度。
根据牛顿第二定律,物体的加速度与作用力成正比,与物体的质量成反比。
因此,通过测量物体在给定外力下的加速度,可以推导出其真实质量。
实验结果经过多次实验测量,我们得到了一系列的数据。
通过对这些数据进行处理和分析,我们得到了物体的惯性质量。
实验结果表明,这种新的测量方法相比传统方法更为准确和可靠。
实验误差分析在实验过程中,我们发现了一些可能导致误差的因素。
首先,测量平台的稳定性对实验结果有很大影响。
如果平台不稳定,物体可能会受到额外的力,导致测量结果不准确。
其次,电子天平的精度也会影响实验结果的准确性。
如果天平的精度不够高,测量结果可能存在一定的误差。
最后,细线的弹性也可能对实验结果产生影响。
当物体受到外力时,细线可能会有一定的伸缩,导致测量结果偏离真实值。
实验改进方案为了提高实验结果的准确性,我们可以采取一些改进措施。
首先,可以使用更稳定的测量平台,确保物体在测量过程中不受到额外的力。
其次,可以使用更高精度的电子天平,提高测量结果的准确性。
最后,可以使用更细的细线,减小其弹性对实验结果的影响。
实验应用惯性质量的测量在科学研究和工程应用中具有重要意义。
准确测量物体的质量是许多实验和工程项目的基础。
惯性测质量实验报告

一、实验目的1. 了解惯性测质量的基本原理和方法。
2. 掌握使用惯性秤进行物体质量测量的操作步骤。
3. 通过实验,验证牛顿第二定律在质量测量中的应用。
二、实验原理惯性测质量实验基于牛顿第二定律,即物体的加速度与作用力成正比,与物体的质量成反比。
通过测量物体在惯性秤上的振动周期,可以计算出物体的质量。
三、实验仪器1. 惯性秤2. 标准质量块3. 秒表4. 秒尺5. 计算器四、实验步骤1. 准备工作:将惯性秤放置在水平桌面上,确保其稳定。
将标准质量块放置在秤台上,调节游码,使横梁水平。
2. 测量标准质量块周期:将秒表置于易于观察的位置,使用秒尺测量标准质量块在惯性秤上的振动周期。
重复测量三次,求平均值。
3. 测量待测物体周期:将待测物体放置在秤台上,调节游码,使横梁水平。
使用秒表和秒尺测量待测物体在惯性秤上的振动周期。
重复测量三次,求平均值。
4. 计算质量:根据标准质量块的周期和待测物体的周期,利用公式计算待测物体的质量。
五、实验数据及处理1. 标准质量块周期(s):T1 = 0.5s,T2 = 0.6s,T3 = 0.55s;平均值T = (0.5 + 0.6 + 0.55) / 3 = 0.55s。
2. 待测物体周期(s):T1' = 0.4s,T2' = 0.45s,T3' = 0.43s;平均值T' = (0.4 + 0.45 + 0.43) / 3 = 0.433s。
3. 标准质量块质量(kg):m = 0.5kg。
4. 待测物体质量(kg):根据公式m' = (m T') / T,代入数据计算得待测物体质量m' = (0.5 0.433) / 0.55 ≈ 0.39kg。
六、实验结果分析通过实验,我们得到了待测物体的质量为0.39kg。
与实际质量存在一定的误差,这可能是由于以下原因:1. 惯性秤的精度有限,存在一定的误差。
2. 测量过程中,秒表和秒尺的读数误差。
第三章 刚体的定轴转动
m r
i 1
n
2
i i
=J
1 2 Ek Jω 2
转动动能
ω 对应 v
J 对应 m
1 2 Ek mv 2
质点的动能
二 转动惯量 ( moment of inertia ) 质量 质点惯性大小的量度
J 与 m 对应
转动惯量 刚体转动惯性大小的量度
n
J mi ri
i 1
2
体分布
dm =ρdV dm =σdS dm =λdl
面分布 线分布
J r dm
2 m
单位:
kg · 2 m
说明: J r 2dm
m
1. J 与刚体的质量有关; 2. 质量一定,与质量的分布有关;
3. 与轴的位置有关。因此叫作绕轴的
转动惯量。
转动惯量的计算
例1 质量为m,半径为 r 的均匀细圆环, 对通过其中心并垂直环面的转轴的转动惯量。 解: 根据转动惯量的定义求解。
3. 题 3-2,3-8,3-9。
§3-1
刚体的定轴转动
刚体 ( rigid body ) :在任何情况下,其形状和大 小都不发生任何变化的物体 刚体是一种理想模型
一 刚体的运动 刚体的运动
{ 转动
平动
平动 ( translation ) 刚体运动时,其上任意两点的连线 , 在运动过程中始终保持其方向不变 。 刚体的平动遵从质点运动的规律
ω ω0 αt
1 2 θ θ0 ω0t αt 2 2 2 ω ω0 2α(θ θ0 )
切向加速度 ( tangential acceleration )
dv at dt d (rω) dt dω r dt
惯性测速方案
惯性测速方案1. 引言在现代交通工具中,测速技术的发展已经成为了必不可少的一项功能。
惯性测速是一种常见的测速方法,通过对车辆的惯性进行测量来确定车辆的实时速度。
本文将介绍惯性测速的原理和实施方案。
2. 原理惯性是指物体在运动状态下保持匀速或保持静止的性质。
根据牛顿第一定律,没有外力作用于物体时,物体将保持其运动状态。
基于这一原理,惯性测速即通过测量车辆减速度或加速度的变化来计算车辆的速度。
惯性测速通常使用加速度传感器和陀螺仪来测量车辆的加速度和旋转角速度。
加速度传感器可以测量车辆沿x、y和z轴方向的加速度分量,而陀螺仪可以测量车辆绕x、y和z轴的旋转角速度。
通过对这些测量值进行积分,可以得到车辆的速度和位置信息。
3. 实施方案3.1 硬件设备惯性测速方案需要以下硬件设备:•加速度传感器:用于测量车辆沿x、y和z轴方向的加速度。
•陀螺仪:用于测量车辆绕x、y和z轴的旋转角速度。
这些硬件设备可以通过内置在车辆中或外部设备的方式进行安装。
3.2 数据采集惯性测速需要实时采集加速度和旋转角速度的数据。
这些数据可以通过传感器实时采集,并通过接口传输到数据处理单元。
3.3 数据处理数据处理单元对采集到的数据进行处理,包括对加速度和旋转角速度数据的滤波、积分和校正。
滤波可以消除噪声和不稳定性,使数据更加准确可靠。
积分可以将加速度和旋转角速度转换为速度和位置信息。
校正可以对数据进行修正,以消除各种误差和不确定性。
3.4 结果输出惯性测速方案通过数据处理单元得到车辆的实时速度和位置信息。
这些信息可以通过显示屏、计算机接口等方式进行输出,以提供给驾驶员或其他系统使用。
4. 应用领域惯性测速方案在许多领域都有广泛的应用,例如:•汽车行业:惯性测速可用于车辆导航系统、电子稳定控制系统等。
•航空航天工业:惯性测速可用于飞行器导航系统、自动驾驶等。
•运动健康领域:惯性测速可用于运动追踪设备、健身器材等。
5. 总结惯性测速是一种基于车辆惯性原理的测速方法,通过测量加速度和旋转角速度来计算车辆的实时速度和位置信息。
惯性质量的测量实验报告

惯性质量的测量实验报告实验目的:
1. 掌握惯性质量的测量方法和步骤。
2. 了解惯性质量的物理背景和测量原理。
实验仪器:
1. 万能弹簧测力计。
2. 电子秤。
3. 六边形杆。
4. 数字计时器。
实验原理:
惯性质量是指杆或棒的每个部分在转动时所产生的惯性力。
该
实验通过对六边形杆在旋转时所产生的惯性质量进行测量,来掌
握惯性质量的测量方法和步骤。
实验步骤:
1. 在水平面上放置六边形杆,并用万能弹簧测力计将其固定在
一端。
在杆的另一端挂上电子秤。
2. 用数字计时器测量六边形杆在固定一端旋转的时间,并记录
下来。
3. 通过万能弹簧测力计和电子秤分别测量固定一端和杆的质量,并记录下来。
实验结果:
1. 测量得到的固定一端的质量为m1=0.2kg,杆的质量为
m2=0.6kg。
2. 固定一端旋转10圈共耗时6.5秒。
实验数据处理:
1. 求出电子秤所测得的力:
F=mg=0.6×9.8=5.88N
2. 求出旋转时的角速度:
ω=2πn/t=2π×10/6.5=9.63rad/s
3. 求出惯性质量:
I=(F/m1)×(1/ω^2)=(5.88/0.2)×(1/9.63^2)=0.038kg·m^2 4. 计算出相对误差:
ΔI/I=|0.038-0.04|/0.04×100%=5%
结论:
本实验成功测量了六边形杆的惯性质量,并得出相对误差为5%。
实验结果与理论值较为接近,说明实验方法准确可靠。
第三章-动量-角动量

对于同一点的角动量对时间的变化率,这一结论称为质点的角
动量定理。
质点的角动量定理可以写为
Mdt dL
其中 Mdt 称为dt 时间内力矩 M对质点的冲量矩。两边
积分有:
t2 t1
Mdt
L2
L1
上式表明:作用于质点的合外力矩M 从 t1 到 t2 时间间隔 内的冲量矩,等于质点在同一时间间隔内角动量的增量。
力心
例4、一质点在x-y平面内运动,已知质点的质量为20 g,在A 、
B 两位置处的速率都是20 m/s ,vA与X轴成45 o角,vB垂 直于y轴。求质点由A点到B点这段时间内,作用在质点
上外力对O点的总冲量矩(已知OA=2m,OB=4m)。
解: 由质点的角动量定理知:
y vB B
由A到B,角动量的方向均垂 直于x-y平面向上
标量式为
(3-5)
对于冲量 I 应注意:
(1)冲量是力对时间的积累作用。
I
t2
Fdt
t1
mv1
mv
mv2
(2)冲量是矢量,其方向与动量增量方向相同。 即 I 的方向与 P 或 mv 的方向相同。
对动量原理应注意:
(1) F 是指物体所受的合外力,I 是合外力的冲量。 (2) 动量原理是矢量式,常用其分量式。 (3) 动量原理用于惯性系。
②已知炮弹对炮车的相对速度为v ,仰角
为时速θ ,度由v速’ 的度水叠平加分原量理为,炮弹对V地的瞬
v’ x = v cosθ – V
系统总动量为 m (v cosθ - V) – MV 系统总动量的水平分量守恒方程:
m (v cos θ - V) – MV = 0
代入数字 解得:
v v
材料力学第三章-PPT

Me3
r / min
Me1 15915 N m
2
3
Me2 Me3 4774.5 N m
Me4 6366 N m
Me1 n Me4
1
4
6366 N·m
+
2)画扭矩图
4774.5 N·m
9549 N·m
【课堂练习】若将
Me2
Me4
从动轮3与4对调如
18
Me1 n Me3
图,试作扭矩图、
2
BC段内:
2,max
T2 Wp 2
π
14103 71.3MPa 100 103 3
3)校核强度
16
2,max >1,max且2,max<[ ] = 80MPa,满足强度条件、
36
§3-5 等直圆杆扭转时得变形·刚度条件
Ⅰ、 扭转时得变形
等直圆杆得扭转变形可用两个横截面得
相对扭转角(相对角位移) j 来度量。
GIP
j Tl 180 GIP
—单位为度 (º)
若圆轴在第i段标距li内Gi、IPi、Ti为常 数,则相对扭转角:
n
j
T i li
—单位为弧度(rad)
i1 Gi I Pi
n
j
T i li 180 —单位为度 (º)
i1 Gi I Pi
39
【例3-4】钢制实心圆轴中,M1=1 592 N·m,M2 = 955 N·m,M3 = 637 N·m,lAB = 300 mm,lAC = 500 mm,d = 70 mm ,切变模量G = 80 Gpa、试求横截面C 相对于
Me
Me
FS左=τ左dydz
FS右=τ右dydz
九年级物理九年级物理认识惯性2(PPT)5-4
~茂盛|发展经济,开辟~。 【财运】名发财的运气:~亨通。 【财政】名政府部门对资财的收入与支出的管理活动:~收入|~赤字。 【财政赤字】年 度财政支出大于财政收入的差额,会计上通常用红字表示,所以叫财政赤字。也叫预算赤字。 【财主】?名占有大量财产的人:土~|大~。 【裁】①动用 刀、剪等把片状物分成若干部分:~纸|~衣;标识标牌 景区标牌 / 小区标识标牌 党建标识 核心价值观标识; 服。②量整张纸分 成的相等的若干份;开○:对~(整张的二分之一)|八~报纸。③动把不用的或多余的去掉;削减:~军|~员|这次精简机构,~了不少人。④安排取 舍(多用于文学艺术):别出心~|《唐诗别~》。⑤文章的体制、格式:体~。⑥衡量;判断:~判|~决。⑦控制;抑止:~制|制~|独~。 【裁编】 ∥动裁减编制:~定岗。 【裁兵】∥ī动旧指裁减军队。 【裁并】动裁减合并(机构)。 【裁撤】动撤销;取消(机构等):~关卡|~重叠的科室。 【裁 处】动考虑决定并加以处置:酌情~。 【裁定】动①裁决。②法院在审理案件或判决执行过程中,就某个问题做出处理决定。 【裁断】动裁决判断;考虑决 定:这件事究竟怎样处理,还望领导~。 【裁夺】动考虑决定:此事如何处置,恳请~。 【裁度】〈书〉动推测断定。 【裁缝】动剪裁缝制(衣服):虽 是布衫布裤,但~得体。 【裁缝】?名做衣服的工人。 【裁减】动削减(机构、人员、装备等):~军备。 【裁剪】动缝制衣服时把衣料按一定的尺寸裁 开:~技术|这套衣服~得很合身。 【裁决】动经过考虑,做出决定:如双方发生争执,由当地主管部门~。 【裁军】动裁减武装人员和军事装备。 【裁
基础物理第7讲力学第三章动量及其守恒
dm
F F气 对 箭 u
dt
二. 重力场中的火箭发射
先分析一微过程: t t +dt
初态:系统质量 M,速度v (对地),动量 M v
末态:喷出燃料后
喷出燃料的质量:dm = - dM,
喷出燃料速度(对地): v - u
火箭壳体 +尚存燃料的质量: M - dm
如图, 一物体在地面滑动,
地面系:f 作负功 生热
f
m
S
m 静止系:有摩擦没位移, f 不作功
“摩擦生热”与参考系有关?
如图, 相互作用力(一对力) f A f B
若位移为 drA 、drB
则这对力所作总元功为:
dA f A drA f B drB
dM
dv u
gdt
M
dM
dv u
gdt
M
忽略地面附近重力加速度 g 的变化,
可得 t 时刻火箭的速度:
Mi
v ( t ) v i gt u ln
Mt
比较:不计重力时
Mt: t 时刻火箭壳和
尚余燃料的质量
Mi
v f v i uln
Mf
(89.5%) 质量相等的两个物体甲和乙,并
AF ( oab )
x
1
b
a
2 x (m)
y
oab
( 2 ydx 4 x dy )
2
1
0
16 dy 16 J
oab
AF ( ob ) ( 2 ydx 4 x 2 dy )
转动惯量 非张量-概述说明以及解释

转动惯量非张量-概述说明以及解释1.引言1.1 概述转动惯量是物体在旋转过程中所展现出的惯性特性,它与物体的质量分布和旋转轴的位置有关。
在经典力学中,转动惯量通常被定义为物体对于沿轴线旋转的惯性程度的度量。
一般而言,转动惯量越大,物体越难以改变其旋转状态。
然而,传统观念中转动惯量被认为是一个张量,也就是说它在不同轴线的方向上具有不同的物理量。
然而,最新的研究发现,转动惯量在某些情况下并不遵循张量的特性。
在本文中,我们将介绍转动惯量的定义,并探讨其非张量性质。
我们将分析其非张量性质的原因,并讨论非张量性质可能对转动惯量的意义和应用产生的影响。
最后,我们将总结转动惯量的特性以及非张量性质对进一步研究的展望。
通过本文的阅读,读者将能够对转动惯量的概念有一个清晰的了解,并了解其非张量性质的意义和可能的应用领域。
我们希望本文能够为研究者提供思路,并促进对转动惯量性质的深入研究和探索。
文章结构部分的内容可以这样编写:1.2 文章结构本文共分为引言、正文和结论三个部分。
1. 引言部分引言部分主要对转动惯量的概念进行概述,并介绍了本篇文章的结构和主要内容。
首先,给出了对转动惯量的定义和意义,以及转动惯量在物理学中的重要性。
然后,说明了本文的目的,即探讨转动惯量的非张量性质,分析其原因,并探讨非张量性质的影响和应用。
2. 正文部分正文部分主要分为四个小节。
首先,第2.1小节将详细介绍转动惯量的定义,包括转动惯量的物理意义、数学表达以及计算方法。
接着,第2.2小节将介绍转动惯量的非张量性质,包括非对称性和非线性性质,并给出具体的例子进行说明。
第2.3小节将分析非张量性质的原因,从微观和宏观两个层面进行解释,涉及到原子结构、分子运动和物体形状等方面的因素。
最后,第2.4小节将探讨非张量性质的意义和应用,包括其在实际物理问题中的重要性和相关的研究领域。
3. 结论部分结论部分主要总结了本文的主要内容和研究结果。
首先,第3.1小节总结了转动惯量的特性,包括其在不同情况下的表现形式和物理意义。
【精品讲义】浙教版 科学 7年级下册 3.4-2 牛顿第一定律——惯性(教师版含解析)

浙教版七年级下科学同步学习精讲精练第3章运动和力3.4-2牛顿第一定律——惯性目录 (1) (2) (4) (6) (10)惯性1.惯性的概念我们把物体保持匀速直线运动状态或静止状态的性质叫作惯性。
惯性是物体的性质,不是力。
2.对惯性的理解(1)惯性是指物体保持静止状态或匀速直线运动状态不变的性质,也就是说静止的物体具有保持静止的性质,运动的物体具有保持匀速直线运动的性质。
(2)任何物体在任何情况下都有惯性。
惯性与外界条件无关,与受力与否、受力大小、处于何种状态、状态如何改变等均无关。
(3)惯性没有方向,物体只是保持之前的运动状态;(4)惯性是自然界中一切物体固有的属性。
不能把惯性说成“受惯性的作用”或“惯性力”,而应该说“由于惯性”(5)惯性的大小由物体的质量决定。
质量越大,惯性越大,质量是惯性大小的量度。
惯性的大小可以由力改变物体运动状态的“困难程度”表现出来。
3.惯性现象物体由于具有惯性而表现出来的现象叫作惯性现象。
惯性现象是我们生活中经常遇到的一种现象,例如:当汽车突然开动时,车上的乘客要向后仰,这是因为人和车原先是静止的,当车突然开动时,乘客的脚已随军向前运动,而身体的上部由于惯性还要保持原来的静止状态,所以乘客要向后仰。
4.惯性现象的分析过程【教材剖析】[思考与讨论]教材P109(1)离开喷泉口的水,因为惯性仍会向上运动。
(2)晃动胡椒粉瓶子后,瓶内的胡椒粉处于运动状态,运动到瓶口因惯性而从瓶内出来。
5.惯性与生活(1)惯性的作用生活中利用惯性可带来很多方便,如向锅炉中送煤,不需要把锹放到锅炉的火中去;锤头松了把锤柄在石头上撞几下,就能紧固;跳远助跑可跳得更远些等等。
因此,要利用惯性带来的方便紧固锤头跳远腾空后运动员继续在空中飞抖落衣服上的灰尘b.惯性带来的危害及避免开车太快或骑车太快容易出交通事故,因此坐汽车要系安全带;汽车行驶时,要保持一定的距离;雨雪天易出交通事故,因此雨雪天开车要减速;载货列车较难启动,要先给车头加速。
实验1.3_惯性秤测量质量
实验1.3用惯性秤测量质量物理天平和分析天平是用来测量质量的仪器,但它们的原理都是基于引力平衡,因此测出的都是引力质量,为进一步加深对惯性质量概念的了解,本实验使用动态的方法,测量物体的惯性质量,以期与引力质量作出比较.【实验目的】1.掌握用惯性秤测定物体质量的原理和方法;2.了解仪器的定标和使用。
【实验仪器】惯性秤,周期测定仪,定标用标准质量块(共10块),待测圆柱体。
【实验原理】根据牛顿第二定律F=ma,有m=F/a,把同一个力作用在不同物体上,并测出各自的加速度,就能确定物体的惯性质量。
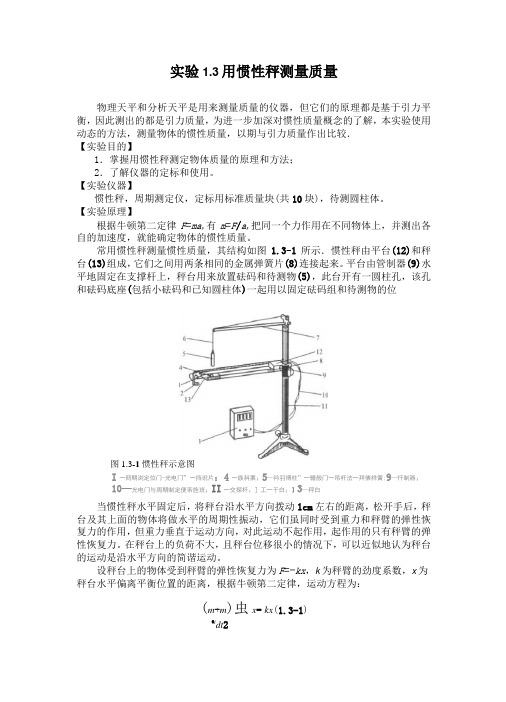
常用惯性秤测量惯性质量,其结构如图1.3-1所示.惯性秤由平台(12)和秤台(13)组成,它们之间用两条相同的金属弹簧片(8)连接起来。
平台由管制器(9)水平地固定在支撑杆上,秤台用来放置砝码和待测物(5),此台开有一圆柱孔,该孔和砝码底座(包括小砝码和已知圆柱体)一起用以固定砝码组和待测物的位图1.3-1惯性秤示意图I一冏期浏定位门-光电门”一挡讹片:4一族科栗;5—衿羽博柱”一辘般门一吊杆法一拜佛样簧;9—忏制器;10—光电门与周期制定便芾旌班;II一交探杆;]工一千白;】3—秤白当惯性秤水平固定后,将秤台沿水平方向拨动1cm左右的距离,松开手后,秤台及其上面的物体将做水平的周期性振动,它们虽同时受到重力和秤臂的弹性恢复力的作用,但重力垂直于运动方向,对此运动不起作用,起作用的只有秤臂的弹性恢复力。
在秤台上的负荷不大,且秤台位移很小的情况下,可以近似地认为秤台的运动是沿水平方向的简谐运动。
设秤台上的物体受到秤臂的弹性恢复力为F=-kx,k为秤臂的劲度系数,x为秤台水平偏离平衡位置的距离,根据牛顿第二定律,运动方程为:(m+m)虫x=-kx(1.3-1)0i dt2式中m为空秤的惯性质量,m为秤台上插入的砝码的惯性质量.0i其振动周期T由下式决定mmm+mT=2冗o二(1.3-2)1k将式(1.3-2)两侧平方,改写成4兀24兀2(1.3-3)T2=m+mk0k i当秤台上负荷不大时,k可看做常数,则上式表明惯性秤的水平振动周期T的平方和附加质量线关系。
物理实验_惯性秤_实验报告

班级__信工C班___ 组别______D______姓名____李铃______ 学号_1111000048_日期___2013.3.20___ 指导教师__刘丽峰__【实验题目】_________惯性秤【实验目的】1.掌握用惯性秤测量物体质量的原理和方法;2.学习惯性秤的定标和使用方法;3.研究重力对惯性秤的影响。
【实验仪器】惯性秤及附件一套,光电控制数字计时器,米尺,天平(公用),水平仪。
【实验原理】惯性秤的主要部分是两条相同的弹性钢带(称为秤臂)连成的一个悬臂振动体A,振动体的一端是秤台B,秤台的槽中可放入定标用的标准质量块。
A的另一端是平台C,通过固定螺栓D把A固定在E座上,旋松固定螺栓D ,则整个悬臂可绕固定螺栓转动,E座可在立柱F上移动,挡光片G和光电门H是测周期用的。
光电门和计时器用导线相连。
将秤台沿水平方向稍稍拉离平衡位置后释放,则秤台在秤臂的弹性恢复力作用下,沿水平方向作往复振动。
其振动频率随着秤台的载荷的变化而变化,其相应周期可用光电控制的数字计时器测定,进而以此为基础,可测定负载的惯性质量。
立柱顶上的吊竿I可用来悬挂待测物(一圆柱形物体),另外本仪器还可将秤臂铅垂地安装,研究重力对秤的振动周期的影响。
根据牛顿第二定律f=ma,可以写成m=f/a。
若以此式作为质量的定义,则称为惯性质量。
在秤臂水平放置时,将秤台沿水平方向拉离平衡位置后释放。
秤台及加于其上的负载在秤臂弹性恢复力f作用下,将做水平往复振动,此时重力因与运动方向垂直,对水平方向的运动影响很小,可以忽略不计。
当振幅较小时,可以把这一振动当作简谐振动处理。
若秤台偏离平衡位置的位移为x时,秤台所受到的弹性恢复力为f=-kx,其中k 为悬臂振动体的劲度系数。
根据牛顿第二定律,其运动方程可写成(2-1)其中m0为振动体空载时的等效质量,m为秤台上加入的附加质量块(砝码或被测物)的质量。
当初相为零时,(2-1)式的解可表示为其中x0为秤台的振幅,其圆频率,其周期T则可表示为(2-2)一、惯性质量的测定与惯性秤的定标在弹性限度内,即k为常数(更确切的说是忽略随负载的微小变化)的情况下,对应于空秤和不同负载m1和mx,由(2-2)式可以分别得到(2-3)从(2-3)式中消去k及m0,得:(2-4)由(2-4)式可见,当已知质量m1时,只要分别测得T0、T1和Tx,就可以求得未知质量mx。
第三章-2 惯性量的测量

陀螺仪
二自由度陀螺仪
特性
任意纬度陀螺仪的表观运动
欲使陀螺转子方向跟踪当地地垂线或者水平面,必须适 当的控制陀螺仪。
陀螺仪
单自由度陀螺仪
特性
单自由度陀螺只有一个框架,相对基座,少了一个转动自由度。
当基座绕自转轴z轴或框架轴x转动时,框架 仍起隔离作用,不会带动转子一起转动。
当基座绕y轴转动时,陀螺仪没 有转动自由度,强迫陀螺仪绕y 轴进动的同时,还强迫陀螺仪绕 框架轴进动并出现进动转角,z 轴将于y轴重合。 单自由度陀螺具有感受绕其输入轴转动的特性。
线加速度传感器的输出电压正比于飞机线加速度计,相位差180°
单位加速度所产生的相对位移量定义为线加速度传感器的分辨率:
可见,线加速度的分辨率反比于其固有频率的平方,即弹簧刚度越小, 质量块的质量越大,线加速度传感器的分辨率就越高。
线加速度传感器
线加速度传感器结构与工作原理
简单式线加速度传感器
优点:构造简单,价格低 缺点:电刷与电位计的摩擦力较大,线性特性差,灵敏度低 为解决上述问题,用力矩系统代替弹簧,增加浮子式阻尼器
刚体转子陀螺仪仍是学习陀螺仪基本理论的基础
高速旋转的物体即为陀螺,为测量运动物体的角位移或角速度,用支架把 高速旋转的转子支撑起来即构成陀螺仪---刚体转子陀螺仪。 核心:绕自转轴高速旋转的刚体转子。 自转轴相对于基座有一个或者两个转动自由度: 二自由度陀螺 单自由度陀螺
陀螺仪
二自由度陀螺仪
基本结构和组成
陀螺仪
陀螺仪的应用
二自由度陀螺的应用
为准确测量飞机姿态,必须保证测量基准的准确 ---始终保持陀螺转子轴与地垂线重合
表观运动+干扰力矩引起的进动漂移 修正 液体开关
利用惯性天平测量物体重力的操作技巧

利用惯性天平测量物体重力的操作技巧引言:惯性天平是一种常用的物理实验仪器,用于测量物体的质量和重力。
它基于牛顿第二定律,利用物体的惯性来测量其所受的重力。
在进行惯性天平实验时,正确的操作技巧非常重要,下面将介绍一些利用惯性天平测量物体重力的操作技巧。
一、准备工作在进行惯性天平实验之前,首先需要准备好实验所需的材料和设备。
这包括一个惯性天平、一些不同质量的物体、一张纸和一支铅笔。
确保天平处于水平状态,并确保其测量范围能够覆盖实验所需的物体质量范围。
二、校准天平在进行实验之前,需要对惯性天平进行校准。
将一个已知质量的物体放在天平的托盘上,并记录下所示质量。
根据物体所受的重力和天平的示数,可以计算出天平的灵敏度。
通过多次校准,可以确保天平的准确性和稳定性。
三、测量过程1. 将待测物体放在天平的托盘上,确保物体与托盘接触紧密,没有松动或滑动。
物体应放置在天平的中央位置,以保证测量的准确性。
2. 记录下天平示数,即物体所受的重力。
示数应是一个稳定的数值,没有明显的波动。
如果示数有较大的波动,可能是由于外界干扰或天平不稳定造成的,需要排除干扰并重新测量。
3. 将物体从托盘上取下,记录下天平示数的变化。
示数的变化值即为物体的重力。
4. 重复上述步骤,使用不同质量的物体进行测量。
根据不同物体的示数变化值,可以计算出每个物体的重力。
四、注意事项1. 在进行实验时,要保持实验环境的稳定,避免外界风力和震动的干扰。
实验室的门窗应尽量关闭,避免空气流动和温度变化。
2. 物体应尽量放置在天平的中央位置,以避免托盘不平衡或物体滑动造成的误差。
3. 在记录示数时,要等待示数稳定后再进行记录,避免示数的波动对测量结果的影响。
4. 如果天平示数的波动较大,可以尝试调整天平的灵敏度或检查天平是否处于稳定状态。
5. 在进行多次测量时,要注意清洁天平的托盘,避免残留物或灰尘对测量结果的影响。
结论:利用惯性天平测量物体重力是一项常见的物理实验。
实验五:惯性称

实验五惯性秤一、实验目的1. 掌握用惯性秤测量惯性质量的原理和方法。
2. 测定物体的惯性质量,加深对惯性质量和引力质量的理解。
3. 学习惯性秤的定标方法。
二、仪器与用具惯性秤及附件、水准仪、周期测定仪。
图5.1 仪器与用具总图图5.2 仪器与用具分解图三、实验原理惯性质量和引力质量是由两个不同的物理定律——牛顿第二定律和万有引力定律引入的两个物理概念,前者表示物体惯性大小的量度,通常用惯性秤测量;后者则表示物体引力大小的量度,通常用天平测量。
两种质量在数值上成正比,采用适当单位,二者相等,因此我们可以统称为质量。
根据牛顿第二定律aFm =,这里的m 即为惯性质量,惯性秤并不是直接比较物体的加速度,而是用振动法比较反映物体加速度的振动周期,去确定物体的质量的。
具体原理如下:惯性秤平台调平后,将平台沿水平方向推开约1cm ,手松开后,平台及其上的物体将在振臂的弹性恢复力作用下作左右振动。
在平台上负载不大且平台位移较小的情况下,可以近似地认为弹性恢复力和平台的位移成正比,即平台是水平方向作简谐振动。
此时重力因与运动方向垂直,对水平方向的运动影响很小,可以忽略不计。
设弹性恢复力F=-kx(k 为称臂的弹性系数,x 为平台质心偏离平衡位置的距离),根据牛顿第二定律,有:kx dtxd )m m (22i 0-=+ (1)x )m m (kdt x d i 022+-= (2)又因为 )x T 2π(x ωdtx d 222-=-= (3)则由(2)和(3)可得km m 2T i0+=π(4) 则 02i 2i 022m k4πm k 4πk m m 4πT +=+= (5) 从上式中消去0m 和k ,得i1221202i m m T T T T =-- (6) 当已知质量1m 时,只要分别测得0T 、1T 、i T ,就可以求得未知质量i m ,这就是使用惯性秤测质量的基本原理和方法。
先测得空称(i m =0)时的周期T ,然后将具有相同惯性质量的片状砝码依次插入平台,测得相应的周期为T 1、T 2、……T I ,作T i 2~i m 曲线,这就是该惯性秤的定标曲线。
惯性秤测物体的惯性质量

惯性秤测物体的惯性质量一.实验目的1. 掌握用惯性秤测定物体惯性质量的原理和方法。
2. 了解仪器的定标和使用。
3. 研究物体的惯性质量与引力质量之间的关系。
二.实验原理惯性质量和引力质量是两个不同的物理概念。
万有引力方程中的质量称为引力质量,它是一物体与其它物体相互吸引性质的量度,用天平称衡的物体就是物体的引力质量;牛顿第二定律的质量称为惯性质量,它是物体的惯性度量,用惯性秤称衡的物体质量就是物体的惯性质量。
当惯性秤沿水平固定后,将秤台沿水平方向推开约1cm ,手松开后,秤台及其上面的负载将左右振动。
它们虽同时受重力及秤臂的弹性恢复力的作用,但重力垂直于运动方向,对物体运动的加速度无关,而决定物体加速度的只有秤臂的弹性恢复力。
在秤台上负载不大且秤台的位移较小的情况下,实验证明可以近似地认为弹性恢复力和秤台的位移成比例,即秤台是在水平方向作简谐振动。
设弹性恢复力kx F -=(k 为秤臂的弹性系数,x 为秤台质心偏离平衡位置的距离)。
根据牛顿第二定律,可得kx dtxd m m i -=+220 (1)式中0m 为秤台惯性质量,i m 为待测物惯性质量。
用)(0i m m +除上式两侧,得出x m m kdt x d i +-=022 (2)此微分方程的解为t A x ωcos =(设初相位为零),式中A 为振幅,ω为圆频率,将其代入(2),可得im m k+=02ω.因为 T πω2=, 所以 km m T i +=02π. (3) 设惯性秤空载周期为0T ,加负载1m 周期为1T ,加负载2m 周期为2T ,从式(3)可得0204m k T π=, )(410221m m kT +=π,)(420222m m kT +=π (4)从上式中消去0m 和k ,得212222021m m T T T T =-- (5)此式表示,当1m 已知时,则在测得0T 、1T 和2T 之后,便可求出2m 。
实际上不必用上式去计算,可以用图解法从i m T -图线上求出未知的惯性质量。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
线加速度传感器
线加速度传感器结构与工作原理
简单式线加速度传感器 工作原理:
电刷位移=敏感质量块位移-壳体位移 得到相应传递函数:
式中:
线加速度传感器
线加速度传感器结构与工作原理
简单式线加速度传感器
当稳态时: 上式表明,当飞机做等加速度运动时,敏感质量块惯性力 大小相等,方向相反,从而使质量块处于平衡位置x。 输出电压: 得到: 与弹簧力
线加速度传感器
线加速度传感器结构与工作原理
挠性摆式力矩反馈加速度传感器
输出电流与输入加速度成正比。
优点:高精度,高可靠性 作为主要的导航级加速度计,在惯性领域得到广泛的应用。
陀螺仪
精确测量飞行器的姿态角、航向角和角速度。 以经典力学为基础的陀螺仪---刚体转子陀螺仪、流体转子陀螺仪和振 动陀螺仪 以非经典力学为基础的陀螺仪---激光陀螺仪,光导纤维陀螺仪,压电 晶体陀螺仪,粒子陀螺仪和核子共振陀螺仪
第三章 测量与传感器
第二节 惯性量的测量
南京航空航天大学金城学院 赵宾 2010,11
线加速度传感器
加速度计用来测量飞机运动的加速度并输出加速度信号。 线加速度传感器 角加速度传感器 角加速度信号可以通过速率陀螺仪与微分电路得到。
线加速度传感器功能 装在飞机质心处 感受和测量飞机的法向加速度、纵向加速度和侧向加速度。
线加速度传感器的输出电压正比于飞机线加速度计,相位差180°
单位加速度所产生的相对位移量定义为线加速度传感器的分辨率:
可见,线加速度的分辨率反比于其固有频率的平方,即弹簧刚度越小, 质量块的质量越大,线加速度传感器的分辨率就越高。
线加速度传感器
线加速度传感器结构与工作原理
简单式线加速度传感器
优点:构造简单,价格低 缺点:电刷与电位计的摩擦力较大,线性特性差,灵敏度低 为解决上述问题,用力矩系统代替弹簧,增加浮子式阻尼器
陀螺仪
二自由度陀螺仪
特性
任意纬度陀螺仪的表观运动
欲使陀螺转子方向跟踪当地地垂线或者水平面,必须适 当的控制陀螺仪。
陀螺仪
单自由度陀螺仪
特性
单自由度陀螺只有一个框架,相对基座,少了一个转动自由度。
当基座绕自转轴z轴或框架轴x转动时,框架 仍起隔离作用,不会带动转子一起转动。
当基座绕y轴转动时,陀螺仪没 有转动自由度,强迫陀螺仪绕y 轴进动的同时,还强迫陀螺仪绕 框架轴进动并出现进动转角,z 轴将于y轴重合。 单自由度陀螺具有感受绕其输入轴转动的特性。
浮子摆式加速度传感器
线加速度传感器
线加速度传感器结构与工作原理
浮子摆式加速度传感器
组成:
浮子摆组合件,力矩器,信号传感器 放大器,密封壳体 浮子摆组合件---单摆,浮筒,信 号传感器转子和 力矩器转子 与简单线加速度传感器相同 单摆相当于活动质量块
工作原理:
线加速度传感器
线加速度传感器结构与工作原理
内环和外环组成的框架装置叫做万向支架。 自转轴和内环轴相互垂直且相交,内环轴和 外环轴相互垂直且相交。三轴相交于一点 ---万向交点。
对于自转轴,仅具有绕内环轴和外环轴两个 轴的转动自由度。
陀螺仪
二自由度陀螺仪
特性
1)进动性 二自由度陀螺仪受外力矩作用时,若外力矩 绕内环轴作用,则陀螺仪绕外环轴转动。
浮子摆式加速度传感器
根据力矩平衡,得到加速度计传感器输出的电压为:
挠性摆式力矩反馈加速度传感器
•当具有加速度a时,摆组件质量m产生 惯性力,并对挠性轴产生惯性力矩 M=mla。 •力矩M使摆组件绕输出轴转动,角位移 传感器将该角度位移转换为电信号,并 放大调解为直流信号输出。 •力矩器线圈输入电流,产生电磁力产生 恢复力矩
陀螺仪
单自由度陀螺仪
工作原理
单自由度陀螺可以测量飞机的转动角速度,所以称为角速度陀螺,也称 速率陀螺。 x/L轴:内环轴,信号输出轴 z轴:转子轴 y轴:测量轴
框架式角速度陀螺
陀螺仪
单自由度陀螺仪
工作原理
框架式角速度陀螺 原理: 沿OY轴有转速 ,沿OY轴出 现支架力矩ML ,在ML 作用下,陀 螺动量矩绕OX轴进动,进动角速 度为 , 角出现后,弹簧产生 力矩 ,方向沿X轴正向。 在此力矩作用下,陀螺将绕OY轴 正向进动,进动角速度 与 同向。当 时,陀螺达到 平衡。
若外力矩绕外环轴作用,则陀螺仪绕内环轴 转动。
陀螺仪
二自由度陀螺仪
特性
陀螺仪的转动方向与外力矩的作用方向相垂直的特性,称为陀螺仪的进 动性。---二自由度陀 Nhomakorabea的基本特性
陀螺进动角速度的方向取决于角动量的方向和外力矩的方向。
右手定律
从角动量L沿最短的路径握向外力 矩M的右手旋进方向即为进动角 速度的方向。
陀螺仪
二自由度陀螺仪
特性
进动角速度的大小,取决于角动量的大小和外力矩的大小。
当角动量为一定值时,进动角速度与外力矩成正比; 当外力矩为一定值时,进动角速度与角动量成反比。 2)陀螺力矩 产生机理:Coriolis效应
外界对陀螺仪施加力矩使其进动时,陀螺仪必然存在反作用力矩,大小和外力 矩相等,方向与外力矩相反,并且作用在施加力矩的物体上---陀螺力矩
在轴承摩擦力矩和不平衡力矩等的影响下,将使陀螺在原始方向出现偏移 误差,称为陀螺的漂移,从而影响其稳定性。
主要表现形式是进动漂移
陀螺仪
二自由度陀螺仪
特性
定轴性---陀螺自转轴相对于惯性空间稳定 地球绕地轴相对于惯性空间转动
若以地球为参考基准,将会看到陀螺仪相对于地球的转动 ---表观运动
地 球 赤 道 处 陀 螺 仪 的 表 观 运 动 地球北极处陀螺仪的表观运动
陀螺仪
二自由度陀螺仪
特性
角动量沿最短路径握向进动角速度的 右手旋进方向即为陀螺力矩的方向。
陀螺力矩并不作用在转子本身,而是作用在给陀螺仪施加力矩的 物体上。
陀螺仪
二自由度陀螺仪
特性
3)定轴性 二自由度陀螺仪的转子绕自转轴高速旋转即具有动量矩L时,如果不受外 力矩作用,将保持其自转轴相对惯性空间方位稳定的特性---定轴性 利用定轴性可以指示和测量飞机的姿态角(相对于地垂线或者水平面)
刚体转子陀螺仪仍是学习陀螺仪基本理论的基础
高速旋转的物体即为陀螺,为测量运动物体的角位移或角速度,用支架把 高速旋转的转子支撑起来即构成陀螺仪---刚体转子陀螺仪。 核心:绕自转轴高速旋转的刚体转子。 自转轴相对于基座有一个或者两个转动自由度: 二自由度陀螺 单自由度陀螺
陀螺仪
二自由度陀螺仪
基本结构和组成