KUKA机器人_Interbus_输入输出端口配置说明书
(完整版)KUKA机器人外部自动配置方法
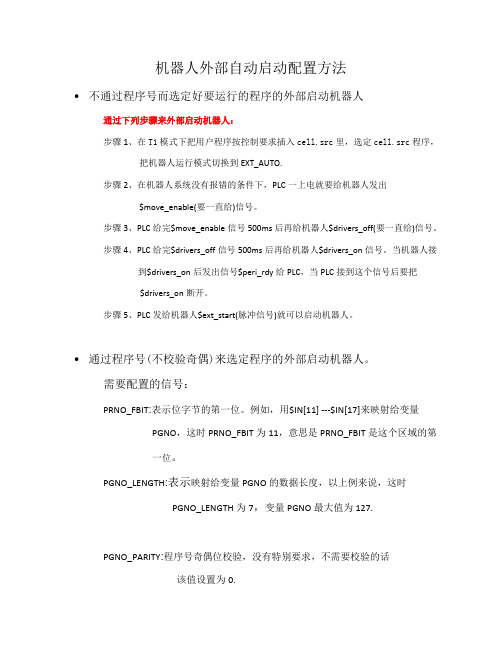
机器人外部自动启动配置方法•不通过程序号而选定好要运行的程序的外部启动机器人通过下列步骤来外部启动机器人:步骤1、在T1模式下把用户程序按控制要求插入cell.src里,选定cell.src程序,把机器人运行模式切换到EXT_AUTO.步骤2、在机器人系统没有报错的条件下,PLC一上电就要给机器人发出$move_enable(要一直给)信号。
步骤3、PLC给完$move_enable信号500ms后再给机器人$drivers_off(要一直给)信号。
步骤4、PLC给完$drivers_off信号500ms后再给机器人$drivers_on信号。
当机器人接到$drivers_on后发出信号$peri_rdy给PLC,当PLC接到这个信号后要把 $drivers_on断开。
步骤5、PLC发给机器人$ext_start(脉冲信号)就可以启动机器人。
•通过程序号(不校验奇偶)来选定程序的外部启动机器人。
需要配置的信号:PRNO_FBIT:表示位字节的第一位。
例如,用$IN[11] ---$IN[17]来映射给变量PGNO,这时PRNO_FBIT为11,意思是PRNO_FBIT是这个区域的第一位。
PGNO_LENGTH:表示映射给变量PGNO的数据长度,以上例来说,这时PGNO_LENGTH为7,变量PGNO最大值为127.PGNO_PARITY:程序号奇偶位校验,没有特别要求,不需要校验的话该值设置为0.PGNO_VAILD:程序号有效,机器人信号输入端的位信号。
把位信号编号编写在其后面,如,用$IN[18]来表示此程序号有效的话,当$IN[18]为TRUE的时候,PLC发过来的程序号才有效。
PGNO_VAILD是个脉冲信号(脉宽1秒左右)。
每次改变程序号时,PLC都要让PGNO_VAILD为TRUE.否则机器人端的变量PGNO的值不会发生改变。
PGNO_REQ:机器人发给PLC的程序号请求信号,位信号。
KUKA机器人 Interbus 输入输出端口配置说明书

I 03.09.2003 I College I PRhI 1KUKA Roboter GmbH, Hery-Park 3000, D-86368 Gersthofen, Tel.: +49 (0) 8 21/45 33-1906, Fax: +49 (0) 8 21/45 33-2340, http://www.kuka-roboter.deI/O systemCALL-PMFC DeviceNet Interbus Periphery managementSoft PLCRobot system ProfibusI 03.09.2003 I College I PRhI 2KUKA Roboter GmbH, Hery-Park 3000, D-86368 Gersthofen, Tel.: +49 (0) 8 21/45 33-1906, Fax: +49 (0) 8 21/45 33-2340, http://www.kuka-roboter.deStructure of IOSYS.INI[CONFIG]VERSION=1.00[DRIVERS];MFC=0,mfcEntry,mfcdrv.oINTERBUS=1,ibusInit,ibusdrv.o;INTERBUSPCI =15,ibsCPPciInit,ibpcidrv.o [MFC]; I/O assignments of the MFC [INTERBUS]; I/O assignments of InterbusIOSYS.INIOnly for ISA cardsOnly for PCI cardsI 03.09.2003 I College I PRhI 3KUKA Roboter GmbH, Hery-Park 3000, D-86368 Gersthofen, Tel.: +49 (0) 8 21/45 33-1906, Fax: +49 (0) 8 21/45 33-2340, http://www.kuka-roboter.de[CONFIG]VERSION=1.00[DRIVERS];MFC=0,mfcEntry,mfcdrv.oINTERBUS=1,ibusInit,ibusdrv.o[MFC]; I/O assignments of the MFC[INTERBUS]; I/O assignments of Interbus [END SECTION]Interbus section ISAActivateIOSYS.INII 03.09.2003 I College I PRhI 4KUKA Roboter GmbH, Hery-Park 3000, D-86368 Gersthofen, Tel.: +49 (0) 8 21/45 33-1906, Fax: +49 (0) 8 21/45 33-2340, http://www.kuka-roboter.de[CONFIG]VERSION=1.00[DRIVERS];MFC=0,mfcEntry,mfcdrv.oINTERBUSPCI =15,ibsCPPciInit,ibpcidrv.o[MFC]; I/O assignments of the MFC[INTERBUSPCI]; I/O assignments of Interbus [END SECTION]Interbus section PCIActivateIOSYS.INII 03.09.2003 I College I PRhI 5KUKA Roboter GmbH, Hery-Park 3000, D-86368 Gersthofen, Tel.: +49 (0) 8 21/45 33-1906, Fax: +49 (0) 8 21/45 33-2340, http://www.kuka-roboter.de+24V=TRUE, 0V=FALSEOUTPUTS $OUT[1]$OUT[2]$OUT[3]$OUT[4]$OUT[5]...$OUT[1024]INPUTS $IN[1]$IN[2]$IN[3]$IN[4]$IN[5]...$IN[1024]$IN[1025]=TRUE $IN[1026]=FALSEFrom the peripheryTo the peripheryInputs/outputs of the KRC controllerExample:INB2=2,x2OUTW6=32,x1Byte offset,x Multiplier=Interbus sideIN OUTBWDWByte offsetRobot sideI 03.09.2003 I College I PRhI6KUKA Roboter GmbH, Hery-Park 3000, D-86368 Gersthofen, Tel.: +49 (0) 8 21/45 33-1906, Fax: +49 (0) 8 21/45 33-2340, http://www.kuka-roboter.deKUKA Roboter GmbH, Hery-Park 3000, D-86368 Gersthofen, Tel.: +49 (0) 8 21/45 33-1906, Fax: +49 (0) 8 21/45 33-2340, http://www.kuka-roboter.deI 03.09.2003 I College I PRhI7DI DO DIDOIf data from the slave interface are to be accessed,then the offset896or larger must be used on theInterbus side.Example:INB20=896,x8OUTB20=896,x8-An output on the PLC is aninput on the robot.-An input on the PLC is anoutput on the robot.I 03.09.2003 I College I PRhI8KUKA Roboter GmbH, Hery-Park 3000, D-86368 Gersthofen, Tel.: +49 (0) 8 21/45 33-1906, Fax: +49 (0) 8 21/45 33-2340, http://www.kuka-roboter.deI 03.09.2003 I College I PRhI 9KUKA Roboter GmbH, Hery-Park 3000, D-86368 Gersthofen, Tel.: +49 (0) 8 21/45 33-1906, Fax: +49 (0) 8 21/45 33-2340, http://www.kuka-roboter.deANALOG OUTPUTS $ANOUT[1]...$ANOUT[32]ANALOG INPUTS $ANIN[1]...$ANIN[16]From the peripheryTo the peripheryAnalog inputs/outputs of the KRC controllerI 03.09.2003 I College I PRhI 10KUKA Roboter GmbH, Hery-Park 3000, D-86368 Gersthofen, Tel.: +49 (0) 8 21/45 33-1906, Fax: +49 (0) 8 21/45 33-2340, http://www.kuka-roboter.deConfiguration of analog I/Os (1)Type :Justification, sign Byte offset,Exponent 2,Type Interbus side =ANIN ANOUTIndexRobot side Cal factor,CAL factor:Limitation of the value rangeThis entry is optional.For the analog module,the specified value in digits corresponds to the nominal value (e.g. 10V).2 : left,without sign3 :left, with sign0 : right,without sign 1 :right, with signKUKA Roboter GmbH, Hery-Park 3000, D-86368 Gersthofen, Tel.: +49 (0) 8 21/45 33-1906, Fax: +49 (0) 8 21/45 33-2340, http://www.kuka-roboter.deI 03.09.2003 I College I PRhI11I 03.09.2003 I College I PRhI 12KUKA Roboter GmbH, Hery-Park 3000, D-86368 Gersthofen, Tel.: +49 (0) 8 21/45 33-1906, Fax: +49 (0) 8 21/45 33-2340, http://www.kuka-roboter.deANIN1=4,16,3,CAL30000Example:Phoenix IB IL AI 2/SF:IOSYS.INI:From the manual:I 03.09.2003 I College I PRhI 13KUKA Roboter GmbH, Hery-Park 3000, D-86368 Gersthofen, Tel.: +49 (0) 8 21/45 33-1906, Fax: +49 (0) 8 21/45 33-2340, http://www.kuka-roboter.deANOUT1=4,16,2 or ANOUT1=4,16,2,CAL65535Example: Phoenix IB IL AO 1/SF:IOSYS.INI:From the manual:FFFFHex = 65535DecI 03.09.2003 I College I PRhI 14KUKA Roboter GmbH, Hery-Park 3000, D-86368 Gersthofen, Tel.: +49 (0) 8 21/45 33-1906, Fax: +49 (0) 8 21/45 33-2340, http://www.kuka-roboter.deANIN1=4,13,3 or ANIN1=4,13,3,CAL4095Example: Phoenix ST modules:IOSYS.INI :From the manual:Note:7FF8Hex = 1111 1111 1111 1000Bin1111 1111 1111 1Bin = 8191Dec (13 bits)With positive and negative range from –4096 to + 4095Example of a bus configuration•Slave ring:16 DI, 16 DO•Master ring:Bus terminal1:16 DI, 16 DI, 16 DO Bus terminal2: 2 AI, 2 AO, 8 DI Bus terminal3:16 DI, 8 DOSl:16 DISl:16 DOKRCMasterBT16DI16DI16DOBT2AI2AO8DIBT16DI8DOI 03.09.2003 I College I PRhI15KUKA Roboter GmbH, Hery-Park 3000, D-86368 Gersthofen, Tel.: +49 (0) 8 21/45 33-1906, Fax: +49 (0) 8 21/45 33-2340, http://www.kuka-roboter.deI 03.09.2003 I College I PRhI 16KUKA Roboter GmbH, Hery-Park 3000, D-86368 Gersthofen, Tel.: +49 (0) 8 21/45 33-1906, Fax: +49 (0) 8 21/45 33-2340, http://www.kuka-roboter.de[INTERBUSPCI]; Inputs of the master ring INW0=0,x1; $IN[1-16]INB2=2,x2; $IN[17-32]ANIN1=4,16,3,CAL30000; $ANIN[1]ANIN2=6,16,3,CALl30000; $ANIN[2]INB4=8,x1; $IN[33-40]INW5=9,x1; $IN[41-56]; Outputs of the master ring OUTW0=0,x1; $OUT[1-16]ANOUT1=2,16,3,CAL30000; $ANOUT[1]ANOUT2=4,16,3,CAL30000; $ANOUT[2]OUTB2=6,x1; $OUT[17-24]IOSYS.INISl: 16 DI Sl: 16 DOKRC MasterBT16DI 16DI 16DO BT2AI 2AO 8DI BT16DI 8DO 0-12-30-19-1064-72-58I 03.09.2003 I College I PRhI 17KUKA Roboter GmbH, Hery-Park 3000, D-86368 Gersthofen, Tel.: +49 (0) 8 21/45 33-1906, Fax: +49 (0) 8 21/45 33-2340, http://www.kuka-roboter.de[INTERBUSPCI]; Inputs of the master ring INW0=0,x1; $IN[1-16]INB2= ......; Outputs of the master ring OUTW0=0,1; $OUT[1-16]ANOUT1= ......; Inputs of the slave ring INW12=896,x1; $IN[97-112]; Outputs of the slave ring OUTW12=896,x1; $OUT[97-112]IOSYS.INISl: 16 DI Sl: 16 DOKRC MasterBT16DI 16DI 16DO BT2AI 2AO 8DI BT16DI 8DO 0-12-30-19-1064-72-58I 03.09.2003 I College I PRhI 18KUKA Roboter GmbH, Hery-Park 3000, D-86368 Gersthofen, Tel.: +49 (0) 8 21/45 33-1906, Fax: +49 (0) 8 21/45 33-2340, http://www.kuka-roboter.deComplete I/O configuration[INTERBUSPCI]; Inputs of the master ring INW0=0,x1; $IN[1-16]INB2=2,x2; $IN[17-32]ANIN1=4,16,3,CAL30000; $ANIN[1]ANIN2=6,16,3,CAL30000; $ANIN[2]INB4=8,x1; $IN[33-40]INW5=9,x1; $IN[41-56]; Outputs of the master ring OUTW0=0,x1; $OUT[1-16]ANOUT1=2,16,3,CAL30000; $ANOUT[1]ANOUT2=4,16,3,CAL30000; $ANOUT[2]OUTB2=6,x1; $OUT[17-24]; Inputs of the slave ring INW12=896,x1; $IN[97-112]; Outputs of the slave ring OUTW12=896,x1; $OUT[97-112]IOSYS.INISl: 16 DI Sl: 16 DOKRC MasterBT16DI 16DI 16DO BT2AI 2AO 8DI BT16DI 8DO 0-12-30-19-1064-72-58I 03.09.2003 I College I PRhI 19KUKA Roboter GmbH, Hery-Park 3000, D-86368 Gersthofen, Tel.: +49 (0) 8 21/45 33-1906, Fax: +49 (0) 8 21/45 33-2340, http://www.kuka-roboter.deRobot controller -dig.inputs Interbus input memory Interbus sideRobot side-:-:-:-8-76INW55INB44INB33INB221INW00ContentsByte offset169-11DI 108 DI 87AI6254DI3162DI 1160ContentsByte offsetI 03.09.2003 I College I PRhI 20KUKA Roboter GmbH, Hery-Park 3000, D-86368 Gersthofen, Tel.: +49 (0) 8 21/45 33-1906, Fax: +49 (0) 8 21/45 33-2340, http://www.kuka-roboter.deRobot controller -dig.inputs Interbus input memory Interbus sideRobot side-:-:-:-:-:-:13INW1212-:-:-:-:ContentsByte offset------------DI 89716896-:-:-:-:ContentsByte offsetI 03.09.2003 I College I PRhI 21KUKA Roboter GmbH, Hery-Park 3000, D-86368 Gersthofen, Tel.: +49 (0) 8 21/45 33-1906, Fax: +49 (0) 8 21/45 33-2340, http://www.kuka-roboter.deRobot controller –analog inputsInterbus input memory Interbus sideRobot side::ANIN55-ANIN44ANIN33-ANIN22-ANIN11ContentsINDEX169-11DI 108 DI 87AI265AI14DI 3162DI 1160ContentsByte offsetI 03.09.2003 I College I PRhI 22KUKA Roboter GmbH, Hery-Park 3000, D-86368 Gersthofen, Tel.: +49 (0) 8 21/45 33-1906, Fax: +49 (0) 8 21/45 33-2340, http://www.kuka-roboter.deRobot controller -dig.outputs Interbus output memory Interbus sideRobot side13-:OUTW1212-:-:-:-:-4,...-3OUTB221OUT00ContentsByte offset16896-898,...DO 897-:-7,...8DO 65AO4232DO1160ContentsByte offsetI 03.09.2003 I College I PRhI 23KUKA Roboter GmbH, Hery-Park 3000, D-86368 Gersthofen, Tel.: +49 (0) 8 21/45 33-1906, Fax: +49 (0) 8 21/45 33-2340, http://www.kuka-roboter.deRobot controller –analog outputsInterbus output memory Interbus sideRobot side::ANOUT55-ANOUT44ANOUT33-ANOUT22-ANOUT11ContentsINDEX-:-:-:-:-:8DO 65AO243AO12DO 1160ContentsByte offsetI 03.09.2003 I College I PRhI 24KUKA Roboter GmbH, Hery-Park 3000, D-86368 Gersthofen, Tel.: +49 (0) 8 21/45 33-1906, Fax: +49 (0) 8 21/45 33-2340, http://www.kuka-roboter.deIntel formatByte 1Byte 01 WordBit 8value 256(2exp8)In the Motorola format,the bytes within a word are interchanged.Bit 0value 1 (2exp0)Motorola formatByte 0Byte 11 WordBit 0value 256(2exp8)Bit 8value 1 (2exp0)PC-based controllers use the Intel formal.(KUKA KRC)Phoenix and Siemens use the Motorola format.Depending on the module,it may be necessary to swapthe bytes within a word!Example:IOSYS.INI:INB0=1,x1 ;Word 0INB1=0,x1 ;Word 0INB2=3,x1 ;Word 2INB3=2,x1 ;Word 2KUKA Roboter GmbH, Hery-Park 3000, D-86368 Gersthofen, Tel.: +49 (0) 8 21/45 33-1906, Fax: +49 (0) 8 21/45 33-2340, http://www.kuka-roboter.deI 03.09.2003 I College I PRhI25Particular features(2)Control signals•There are modules(e.g. analog inputs)which can be configured by means ofcontrol signals(outputs on the robot).•These control signals can be configured if necessary.•Control signals can be used to specify the analog format,for example.•There exist modules with 8inputs,for example.These module occupy1workon the Interbus memory(Interbus memory),however.The unused byte has nofunction.KUKA Roboter GmbH, Hery-Park 3000, D-86368 Gersthofen, Tel.: +49 (0) 8 21/45 33-1906, Fax: +49 (0) 8 21/45 33-2340, http://www.kuka-roboter.deI 03.09.2003 I College I PRhI26Particular features(3)Even-numbered offset control signalsThere are modules(e.g. analog inputs and outputs)which always start at aneven-numbered Interbus offset byte.The bytes in between are not used.KUKA Roboter GmbH, Hery-Park 3000, D-86368 Gersthofen, Tel.: +49 (0) 8 21/45 33-1906, Fax: +49 (0) 8 21/45 33-2340, http://www.kuka-roboter.deI 03.09.2003 I College I PRhI27。
KUKA机器人 Interbus 输入输出端口配置说明书
KUKA Interbus 输入输出端口配置说明书KUKA Interbus 输入输出端口配置说明书1.概述本文档旨在提供关于KUKnterbus的输入输出端口配置的详细说明。
Interbus是一种常用的工业总线通信协议,用于在系统中实现输入输出设备的连接和控制。
2.Interbus输入输出端口基础知识2.1 Interbus总线结构Interbus总线是一个串行通信总线,用于连接各种输入输出设备和控制器。
它采用了主从式架构,其中一个控制器作为总线的主节点,其他设备作为从节点。
总线上的设备可以通过Interbus协议进行通信和数据交换。
2.2 Interbus输入输出模块Interbus输入输出模块是一种专门设计用于连接和控制各种输入输出设备的模块。
它具有多个数字输入和输出通道,通过与控制器连接,可实现对这些设备的控制和状态监测。
3.配置Interbus输入输出端口的步骤3.1 硬件连接首先,将Interbus输入输出模块与控制器进行物理连接。
这通常包括连接输入输出模块的电源线和总线连接线到控制器的相应接口。
3.2 软件设置在控制器的软件界面中,进入Interbus配置页面。
根据实际情况,选择Interbus输入输出模块的型号和配置参数。
这些参数通常包括总线地质、节点地质、通信速率等。
3.3 输入输出配置在Interbus配置界面中,根据连接的输入输出设备的类型和数量,进行输入输出通道的配置。
可以设置每个通道的输入输出方式(如开关量输入、模拟量输入、开关量输出等)和相应的参数(如输入信号类型、输出信号电平等)。
4.附件- 附件1:Interbus输入输出模块说明书- 附件2:控制器使用手册5.法律名词及注释- Interbus:一种工业总线通信协议,用于实现输入输出设备的连接和控制。
- 输入输出模块:专门设计用于连接和控制各种输入输出设备的模块。
- 总线:指用于数据交换的通信线路。
- 主从式架构:一种通信架构,其中一个设备作为总线的主节点,其他设备作为从节点。
KUKA机器人外部自动配置
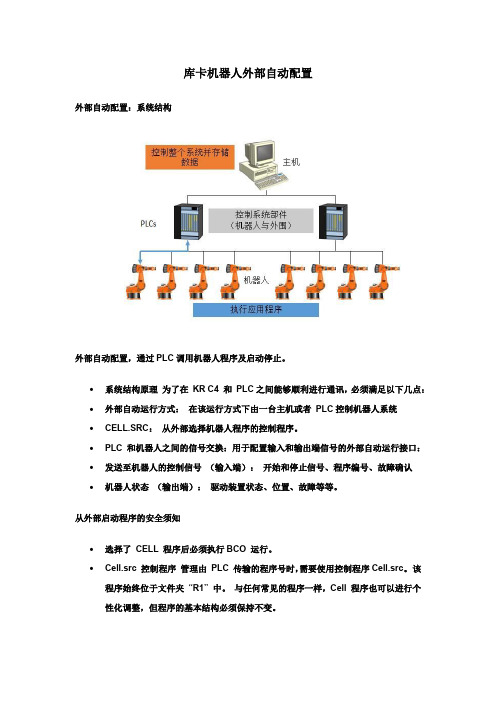
库卡机器人外部自动配置外部自动配置:系统结构外部自动配置,通过PLC调用机器人程序及启动停止。
∙系统结构原理为了在KR C4 和PLC之间能够顺利进行通讯,必须满足以下几点:∙外部自动运行方式:在该运行方式下由一台主机或者PLC控制机器人系统∙CELL.SRC:从外部选择机器人程序的控制程序。
∙PLC 和机器人之间的信号交换:用于配置输入和输出端信号的外部自动运行接口:∙发送至机器人的控制信号(输入端):开始和停止信号、程序编号、故障确认∙机器人状态(输出端):驱动装置状态、位置、故障等等。
从外部启动程序的安全须知∙选择了CELL 程序后必须执行BCO 运行。
∙Cell.src 控制程序管理由PLC 传输的程序号时,需要使用控制程序Cell.src。
该程序始终位于文件夹“R1” 中。
与任何常见的程序一样,Cell 程序也可以进行个性化调整,但程序的基本结构必须保持不变。
Cell程序的结构和功能:1、初始化和Home 位置∙初始化基坐标参数∙根据“Home” 位置检查机器人位置∙初始化外部自动运行接口2、无限循环:∙通过模块“P00” 询问程序号∙进入已经确定程序号的选择循环。
3 、程序号的选择循环∙根据程序号(保存在变量“PGNO” 中)跳转至相应的分支(“CASE”) 中。
∙记录在分支中的机器人程序即被运行。
∙无效的程序号会导致程序跳转至“ 默认的” 分支中。
∙运行成功结束后会自动重复这一循环。
更改CELL•操作步骤:1. 切换到“ 专家” 用户组2.打开CELL.SRC。
3.在“CASE” 段中将名称“EXAMPLE” 用•应从相应的程序编号调出的程序的•名称替换。
删除名称前的分号。
4. 关闭程序并保存更改更改外部自动接口,根据标准填写输入接口信号。
输出信号变量说明∙PERI_RDY 通过设定这个输出,机器人控制器与主计算机通讯驱动器接通的细节ALARM_STOP 在急停情况下复位该输出。
正常一直为1,急停为0 ∙USER_SAF如果安全栅栏监控开关被打开(在AUTO方式下)或使能开关被释放(在TEST方式下)复位该输出。
德国KUKA(库卡)机器人操作手册
发布日期: 11.04.2014版本: BA KR C4 GI V10www.P LCwo r l d.c n© 版权 2014KUKA Roboter GmbH Zugspitzstraße 140D-86165 Augsburg 德国此文献或节选只有在征得库卡机器人集团公司明确同意的情况下才允许复制或对第三方开放。
除了本文献中说明的功能外,控制系统还可能具有其他功能。
但是在新供货或进行维修时,无权要求库卡公司提供这些功能。
我们已就印刷品的内容与描述的硬件和软件内容是否一致进行了校对。
但是不排除有不一致的情况,我们对此不承担责任。
但是我们定期校对印刷品的内容,并在之后的版本中作必要的更改。
我们保留在不影响功能的情况下进行技术更改的权利。
本文件为原版文件的翻译。
KIM-PS5-DOC出版物:Pub BA KR C4 GI (PDF) zh 书页构造:BA KR C4 GI V11.2版本:BA KR C4 GI V10www.PLC wo r l d.c n1引言 .............................................................91.1工业机器人文献 .........................................................91.2提示的图示 .............................................................91.3商标 ...................................................................91.4所用概念 ...............................................................102对象和用途 .......................................................132.1目标群体 ...............................................................132.2按规定使用 .............................................................133产品说明 .........................................................153.1工业机器人概览 .........................................................153.2机器人控制系统概览 .....................................................153.3库卡 Power Pack ........................................................173.4库卡 Servo-Pack ........................................................173.5控制系统 PC ...........................................................173.6控制柜 .................................................................183.7安全接口板 .............................................................193.8旋转变压器数字转换器 ...................................................193.9控制器系统面板 .........................................................193.10低压电源件 .............................................................203.11外部24 V 供电电源 ......................................................203.12蓄电池 .................................................................203.13电源滤波器 .............................................................213.14总线用户 ...............................................................213.14.1KCB 用户 .............................................................213.14.2KSB 用户和配置类型 ...................................................223.14.3KEB 用户和配置类型 ...................................................223.15接线面板接口 ...........................................................243.16电机插头 Xxx、附加轴 X7.1 和 X7.2 ......................................253.16.1电机插头 X20 的插头配置 ..............................................263.16.2重载荷件 X20.1 和 X20.4 插头配置 .....................................273.16.3附加轴 1 插头配置 X7.1 ...............................................283.16.4附加轴 1 和 2 插头配置 X7.1 和 X7.2 .................................283.16.5 4 轴重载型卸码垛机器人插头配置 X8 ....................................293.16.6 4 轴卸码垛机器人插头配置 X20 .........................................303.16.7 5 轴重载型卸码垛机器人插头配置 X20.1 和 X20.4 ........................313.16.8 5 轴卸码垛机器人插头配置 X20 .........................................323.16.9X81(4 轴)插头配置 .................................................333.16.10X82(8 根轴)插头配置 ...............................................343.16.11卸码垛机器人附加轴 1 插头配置 X7.1 ...................................343.16.12卸码垛机器人附加轴 1 和 2 插头配置 X7.1 和 X7.2 ......................353.17多功能接线板 X81,单个插头 X7.1...X7.4 .................................353.17.1X81(3 轴)插头配置 .................................................363.17.2X81(4 轴)插头配置 .................................................373.17.3X81、X7.1(5 轴)插头配置 ...........................................383.17.4X81、X7.1 和 X7.2(6 轴)插头配置 ...................................39目录www.P LC wo r l d.c n3.17.5X81、X7.1...X7.3(7 轴)插头配置 .....................................403.17.6X81、X7.1...X7.4(8 轴)插头配置 .....................................413.18单个插头 X7.1...X7.8 ....................................................433.18.1X7.1...X7.3(3 轴)插头配置 ..........................................443.18.2X7.1...X7.4(4 轴)插头配置 ..........................................453.18.3X7.1...X7.5(5 轴)插头配置 ..........................................463.18.4X7.1...X7.6(6 轴)插头配置 ..........................................473.18.5X7.1...X7.7 插头配置(7 轴) .........................................493.18.6X7.1...X7.8(8 轴)插头配置 ..........................................513.19控制系统 PC 机接口 ......................................................523.19.1主板 D2608-K 接口 ....................................................533.19.2主板 D3076-K 接口 ....................................................543.19.3主板 D3236-K 接口 ....................................................553.20库卡 smartPAD 支架(选项) ..............................................563.21柜冷却装置 ..............................................................573.22客户安装空间说明 ........................................................574技术数据 .........................................................594.124 V 外来供电 ...........................................................604.2安全接口板 .. (61)4.3机器人控制器尺寸 ........................................................624.4机器人控制器的最小间距 ..................................................624.5柜门的摆动范围 ..........................................................634.6smartPAD 支架尺寸(选项) ...............................................644.7用于地面固定的钻孔尺寸 ..................................................644.8技术柜的钻孔尺寸 ........................................................644.9标牌 ....................................................................655安全 .............................................................695.1一般 ....................................................................695.1.1责任说明 .............................................................695.1.2按规定使用工业机器人 .................................................695.1.3欧盟一致性声明及安装说明 .............................................705.1.4使用的概念 ...........................................................705.2相关人员 ................................................................715.3工作区域、防护区域及危险区域 ............................................725.4停机反应的触发器 ........................................................725.5安全功能 ................................................................735.5.1安全功能概览 .........................................................735.5.2安全控制系统 .........................................................745.5.3运行方式选择 .........................................................745.5.4“操作人员防护装置” 信号 ...........................................745.5.5紧急停止装置 .........................................................755.5.6从上一级安全控制系统中退出登录 .......................................755.5.7外部紧急停止装置 .....................................................765.5.8确认装置 .............................................................765.5.9外部确认装置 .........................................................765.5.10外部安全运行停止 .....................................................765.5.11外部安全停止 1 和外部安全停止 2 ......................................77 www.P LC wo r l d.c n5.5.12T1 的速度监控 ........................................................775.6附加防护装备 ...........................................................775.6.1点动运行 .............................................................775.6.2软件极限开关 .........................................................775.6.3机械终端止挡 .........................................................775.6.4机械式轴范围限制装置(选项) .........................................775.6.5轴运动范围监控装置(选项) ...........................................785.6.6不用驱动能量移动机械手的方法 .........................................785.6.7工业机器人上的标识 ...................................................785.6.8外部防护装置 .........................................................795.7运行方式和防护功能概览 .................................................795.8安全措施 ...............................................................805.8.1通用安全措施 .........................................................805.8.2运输 .................................................................805.8.3投入运行和重新投入运行 ...............................................815.8.3.1检查机器数据和安全配置 ............................................825.8.3.2调试模式 ..........................................................835.8.4手动运行 .............................................................835.8.5模拟 .................................................................845.8.6自动运行 .............................................................845.8.7保养和维修 ...........................................................845.8.8停止运转,仓储和废料处理 .............................................865.8.9单点控制(Single Point of Control)的安全措施 .......................865.9所用的标准和规定 .......................................................876规划 .............................................................896.1电磁兼容性(EMC) ......................................................896.2置放条件 ...............................................................896.3连接条件 ...............................................................926.4固定库卡 smartPAD 支架(选项) .........................................936.5使用 Harting 插头 X1 的电源接口 ........................................936.6安全接口 X11 的说明 ....................................................946.6.1安全接口 X11 .........................................................956.6.2外部确认开关接口 X11 .................................................986.6.3插头 X11 的插孔图 ....................................................996.6.4紧急停止回路及防护装置的布线示例 .....................................996.6.5安全输入端和输出端布线示例 ...........................................1006.7通过以太网安全接口的安全功能 ...........................................1026.7.1确认开关基本电路 .....................................................1066.7.2通过以太网安全接口的 SafeOperation (选项) ...........................1066.7.3以太网接口 (1xRJ45) X66 ..............................................1096.8CIB 上的 EtherCAT 接口 .................................................1096.9接地电位均衡导线 .......................................................1106.10更改系统结构,更换设备 .................................................1116.11确认操作人员防护装置 ...................................................1116.12性能级 .. (111)6.12.1安全功能的 PFH 值(PFH = Probability of Failure per Hour,即每小时故障概率)1127运输 .............................................................115 www.P L C w o rl d .c n7.1用运输托盘挽具运输 ......................................................1157.2使用叉车进行运输 .. (116)7.3用电动叉车进行运输 ......................................................1187.4用滚轮附件组运输(选项) ................................................1188投入运行和重新投入运行 ...........................................1198.1概览投入运行 (119)8.2置放机器人控制系统 ......................................................1208.3接上连接电缆 ............................................................1208.3.1X21 数据线路 .........................................................1218.4固定库卡 smartPAD 支架(选项) ..........................................1218.5插入库卡 smartPAD .......................................................1228.6连接接地电位均衡导线 ....................................................1228.7将机器人控制系统连接到电源上 ............................................1228.8取消蓄电池放电保护 ......................................................1238.9将安全接口 X11 接好线并插入 .............................................1248.10更改系统结构,更换设备 ..................................................1248.11投入运行模式 ............................................................1248.12接通机器人控制器 ........................................................1259操作 .............................................................1279.1库卡 smartPAD 手持编程器 ................................................1279.1.1前部 .................................................................1279.1.2背面 .................................................................12810保养 .............................................................13110.1保养图标 ................................................................13110.2检查 SIB 继电器输出端 ...................................................13310.3检查 SIB 扩展型继电器输出端 .............................................13310.4清洁机器人控制系统 ......................................................13311维修 (135)11.1修理及备件购置 ..........................................................13511.2布线示例 X11 ............................................................13611.3更换外部风扇 ............................................................13711.4更换控制系统 PC 机组件 ..................................................13811.4.1更换控制系统 PC 机 ...................................................13811.4.2更换控制系统 PC 机风扇 ...............................................13911.4.3更换主板 .............................................................14111.4.4更换主板电池 .........................................................14111.4.5更换 LAN 双网卡 DualNIC ..............................................14111.4.6更换硬盘 .............................................................14111.5更改系统结构,更换设备 ..................................................14211.5.1更换库卡 Power Pack ..................................................14311.5.2更换库卡伺服包 (KSP) ...............................................14511.5.3更换控制柜 ...........................................................14811.5.4更换安全接口板 .......................................................15111.5.5更换旋转变压器数字转换器 .............................................15311.6更换蓄电池 ..............................................................15511.7更换低压电源 ............................................................157 www.P LC wo rl d.c n11.8更换平衡压力分隔器 .....................................................15811.9安装库卡系统软件 (KSS) .................................................15912故障排除 (161)12.1控制柜 LED 显示 ........................................................16112.2保险装置控制柜 .........................................................16412.3分解器数字转换器 LED 显示 ..............................................16512.4控制器系统面板 LED 显示 ................................................16612.4.1控制器系统面板 LED 故障显示 ..........................................16812.5安全接口板 LED 显示 ....................................................16912.6控制系统 PC 机接口 .....................................................17112.6.1主板 D2608-K 板载 LAN 网卡 LED 显示 .................................17212.6.2主板 D3076-K 板载 LAN 网卡 LED 显示 .................................17212.6.3主板 D3236-K 板载 LAN 网卡 LED 显示 .................................17312.7安全接口板保险装置 .....................................................17312.8检查库卡 Servo Pack ....................................................17512.9检查库卡 Power Pack ....................................................17612.10KPP 和 KSP 的故障信息 ..................................................17712.11KPP 和 KSP 的警告提示 ..................................................18013停止运转,仓储和废料处理 (185)13.1停止运转 ...............................................................18513.2仓储 ...................................................................18513.3废物处理 ...............................................................18514库卡服务 (187)14.1技术支持咨询 ...........................................................18714.2库卡客户支持系统 .......................................................187索引 (195) www.PLC wo r l d.c nwww.P LC wo r l d.c n9 / 201: BA KR C4 GI V101引言1.1工业机器人文献工业机器人文献由以下部分组成:⏹机器人机械装置文献⏹机器人控制系统文献⏹系统软件操作及编程指南⏹选项及附件指南⏹保存在数据载体上的部件目录每份指南均独立成篇。
库卡机器人初次通电和IO配置说明文档

KUKA——Automation Becomes Easy
机器人初次通电——IO配置之项目配置 IO配置之项目配置可分为三大步骤:即项目上传、项目IO配置、项目下载 2,项目IO配置:方法示例,以实际为准 (1)在SYS-X44扩展总线下,按照层次和顺序配置正确的模块,例如:
右击鼠标,选择“add (添加)”按钮,加入对 应模块
机器人初次通电——IO配置之项目配置
机器人初次通电——电气连接
2,机器人安全回路接口,接线图根据控制柜型号不同,接线方式也不一样。
(2)KR C4 Compact & KR C4 Smallsize 控制柜:
急停、安全门信号说明:建议接入相应的安全装置里, 如果确定不需要接入,将相应的通道短接即可,如下 所示:
X11接头接线方式: 急停A组:1和2短接 急停B组:10和11短接
备注:控制柜型号差异,电源的上电开关会有不同
机器人初次通电——初次上电
机器人第一次上电,示教器有时会出现如下界面,届时请耐心等待机器人最后的上电 完成,进入到KSS系统里,图片如下:
机器人初次通电——初次上电 机器人KSS系统里,会提示选择机器人信息的对话框,选择“机器人”按钮,如下:
机器人初次通电——初次上电
机器人初次通电——电气连接 控制柜(标准型)接口图示如下:
机器人初次通电——电气连接 机器人本体接口图示如下:
机器人初次通电——电气连接
以上为控制柜和机器人的示例接口,控制柜型号和机器人型号不一样,对应接口会略 有差别,但标签会是一样的,请留意。 对应接口的接线及说明如下: 1,X1接头:控制柜供电接口。
机器人初次通电——IO配置之设备说明文件导入
IO模块的设备描述文件导入到WorkVisual软件:找到软件的安装文件,进入“DOC” 文件夹,有中文使用说明文档,打开文档找到“导入设备说明文件”目录,按照步骤操 作即可。注意:必须和模块型号相对应!
KUKA机器人PROFIBUS硬件配置步骤
KUKA机器人PROFIBUS硬件配置步骤
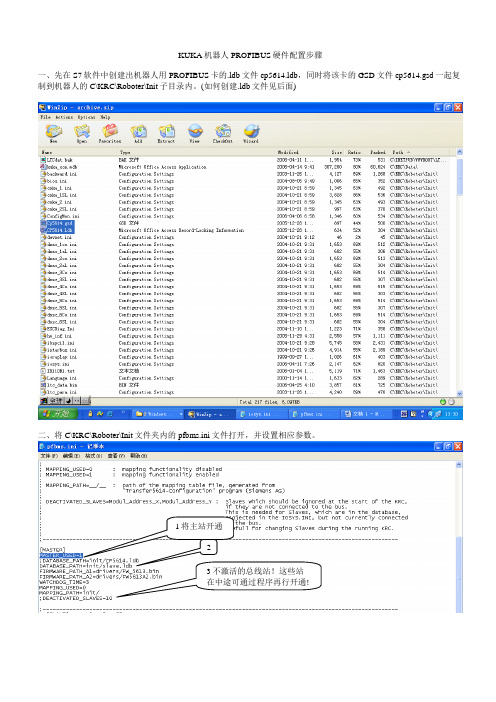
一、先在S7软件中创建出机器人用PROFIBUS卡的.ldb文件cp5614.ldb,同时将该卡的GSD文件cp5614.gsd一起复制到机器人的C\KRC\Roboter\Init子目录内。
(如何创建.ldb文件见后面)
二、将C\KRC\Roboter\Init文件夹内的pfbms.ini文件打开,并设置相应参数。
1将主站开通
2
3不激活的总线站!这些站
在中途可通过程序再行开通!
三、在C\KRC\Roboter\Init文件夹的iosys.ini
文件的该行开通,并设置输入输出地址!
1该从站总线卡在整个
PLC系统中的站号设
此处地址必须为127!
此处地址必须为127!
创建.ldb文件的步骤
1、在S7的硬件配置中,找到CP5614A2卡,并拖入配置框;
2、找到Application中的SWV6.3,并拖入CP5614A2的下一行配置框;
3、双击配置框中的CP5614A2,在对话框中选中operation mode 这个下拉菜单,选中“DP maser”,在DP mode
项选中“DPV1”,在Assigned application中选中“application”,并打“√”选中“create ldb file”;
4、“保存”。
2024库卡机器人详细使用教程讲解干货

01库卡机器人概述Chapter库卡机器人简介库卡机器人应用领域汽车制造电子产品制造物流仓储食品加工01020304先进的控制系统强大的编程能力多样化的机器人型号智能化的人机交互库卡机器人技术特点02库卡机器人基本操作Chapter开机步骤打开机器人主电源开关。
等待系统自检完成,屏幕显示正常。
输入开机密码,进入操作系统。
关机步骤在操作系统中选择关机选项。
确认机器人处于安全位置,无障碍物。
关闭机器人主电源开关。
01020304显示机器人状态、程序列表、IO 状态等。
主界面用于编写、修改机器人程序,提供丰富的编程指令和调试功能。
程序编辑界面实时显示机器人运行状态、关节角度、速度等信息。
监控界面配置机器人输入输出接口,实现与外部设备的通信。
IO 配置界面操作界面介绍基本操作指令01020304移动指令等待指令IO控制指令程序控制指令03库卡机器人编程与调试Chapter编程语言介绍编程环境搭建库卡机器人编程环境主要包括KUKA.WorkVisual软件,这是一款集成化的开发环境,支持机器人程序的编写、仿真和调试等功能。
在安装KUKA.WorkVisual软件之前,需要确保计算机满足最低系统要求,并正确安装相应的操作系统和驱动程序。
安装完成后,打开KUKA.WorkVisual 软件,按照提示进行配置和初始化操作,即可开始编写机器人程序。
程序编写与调试04库卡机器人高级功能应用Chapter视觉系统硬件组成图像处理技术视觉引导机器人030201视觉系统集成力控技术应用力控技术原理力传感器介绍解析力控技术的基本原理,如何通过力传感器实时监测机器人与环境之间的作用力,并调整机器人的运动策略。
力控技术应用案例轨迹规划与优化轨迹规划方法轨迹优化策略实际应用案例05库卡机器人维护与保养Chapter检查电缆和连接器定期检查机器人电缆和连接器的完好性,确保没有破损或松动现象。
如有需要,及时更换损坏的电缆或紧固松动的连接器。
机器人的输入输出介绍与配置
2.3 知 识 准 备
• 数字输入端子 X4 详细介绍如表 2−5 所示。
• 2.3.4 模拟量输入/输出介绍
• 模拟量输入以 KL3064(图 2−13)为例,KL3064 提供 4 个通道的 模拟量输入,模拟量电压范围为 0~10 V。如果需要模拟量输入类型 为电流,KL3064 提供了 4 个通道的模拟量输入,模拟量电流范围为 4~20 mA。
按钮。 • (6)接受许可证条件并单击“Next”按钮。 • (7)单击所需的安装类型。 • 2. WorkVisual 软件基本操作 • 在默认状态下,并非所有单元都显示在操作界面上,而是可根据需要
显示或隐藏。除了图 2−2 所示的窗口和编辑器之外,还有更多可供 选用。这些可通过菜单项窗口和编辑器显示。操作界面及按键栏说明 详见表 2−1 和表 2−2。
流 24 V,输出电流最大为 0.5 A,驱动负载时电流若大于 0.5 A,则 有可能损坏输出点位,使用时应特别注意。 • 2. 8/8 防短路数字输入/输出的介绍 • 8/8 防短路数字输入/输出模块如图 2−12 所示。 • 数字输出端子 X3 详细介绍如表 2−3 所示。 • 数字输入和输出端子 X4 详细介绍如表 2−4 所示。
安装。 • (4)如果 PC 上还缺少以下组件,则将打开相应的安装助手: • □ Visual C++ Runtime Libraries
上一页 下一页 返回
2.3 知 识 准 备
• □ WinPcap • 按照安装助手的指示逐步进行操作,Visual C++ Runtime Libraries
和/或 WinPcap 即被安装。 • (5)窗口 WorkVisual […] 设置打开,如图 2−1 所示。单击“Next”
KUKA机器人 Interbus 输入输出端口配置说明书
KUKA Interbus 输入输出端口配置说明书KUKA Interbus 输入输出端口配置说明书目录:1、简介1.1 功能概述1.2 适用范围2、硬件配置2.1 与Interbus模块连接2.2 电源供应2.3 输入输出端口排列3、端口配置3.1 Interbus输入端口配置3.2 Interbus输出端口配置3.3 端口功能设置4、编程指南4.1 Interbus I/O模块使用示例4.2 编程接口说明4.3 常见问题与解决方案5、维护与故障排除5.1 端口接线检查5.2 Interbus模块故障排除指南5.3 维护注意事项6、附录6.1 Interbus 输入输出端口示意图6.2 Interbus I/O模块连接图6.3 Interbus I/O模块技术规格表6.4 相关法律名词及注释1、简介1.1 功能概述本章节介绍KUKA Interbus 输入输出端口配置说明书的目的和功能。
1.2 适用范围本章节详细说明KUKA Interbus 输入输出端口配置适用的型号和版本。
2、硬件配置2.1 与Interbus模块连接本章节描述与Interbus模块之间的物理连接方式和步骤。
2.2 电源供应本节说明Interbus模块的电源供应要求和连接方式。
2.3 输入输出端口排列本节详细列出Interbus模块的输入输出端口排列和对应的功能。
3、端口配置3.1 Interbus输入端口配置本章节介绍如何配置Interbus模块的输入端口,包括设置端口类型、数据格式等。
3.2 Interbus输出端口配置本章节介绍如何配置Interbus模块的输出端口,包括设置端口类型、数据格式等。
3.3 端口功能设置本章节介绍如何根据实际需求设置Interbus模块的端口功能,包括输入输出设备的映射、信号类型等。
4、编程指南4.1 Interbus I/O模块使用示例本章节提供使用Interbus模块进行输入输出控制的示例代码和步骤。
库卡机械手操作界面说明书

菜单栏 功能选择栏 命令栏 操作栏路径栏 程序栏对话框 状态栏 一、界面说明确认:将对话框中高亮的一行确认掉;全部确认:将对话框中所有的信息确认掉。
操作模式选择鼠标操作机器人移动操作模式选择: 键盘操作机器人移动新建:新建一个文档或者文件夹打印:将目前程序栏内的文件打印出来存档:->还原:->软盘格式化:将控制柜内的软盘格式化筛选:输入特定的信息,以便更容易地找出需要的文件文件二、资源管理器模式下的功能说明全部:将所有信息存入软盘。
注:如果程序过多,则有可能存档失败。
此时需要单独将应用程 序存档,再将其它设置进行存档。
应用程序:将程序栏内的所有程序存入软盘中机器参数:将不同型号机器人的参数存入软盘中配置:->登陆数据:将机器人操作时候的操作记录存入软盘中输入/输出端配置:机器人和外围设备通讯接口配置输入/输出长文本:机器人和外部设备通讯的基本通讯协议配置库卡工艺包:为每个行业不同应用专门开发的工艺软件的配置配置请参看存档,还原即将存档的资料重新拷贝回机器人输入/输出端:->输入/输出端驱动程序->提交解释程序->状态键:如果有安装库卡工艺包,则功能选择栏会出现相应的功能键手动移动->用户组:有三个对应选项:用户,仅可以进行基本操作;专家:可以使用高阶编程语句进行软 件编写;管理员:可以对系统配置进行更改。
当前工具/基坐标:当前系统所用的工具类型或者基坐标类型。
在正常情况下只有更换焊枪系 统以及外部轴系统需要用到此功能工具定义:->开/关选项:->杂项:->配置外部自动:配置诸如撞枪保护开关等的端口信息。
除特殊应用外一般不用作任何更改输入/输出端输入/输出驱动程序驱动器复位:将所有输入输出端口的配置进行复位操作输入/输出端重新配置:调出输入输出端口的配置文件,进行重新配置操作输入/输出状态:显示输入输出系统是否正常线性通讯:在某些系统中我们需要到直接与外部系统进行TCP/IP通讯启动/选择:将系统定义文件选定或者启动。
麦格米特焊机和KUKA机器人通讯配置说明 2.1
麦格米特焊机和KUKA配置操作说明目录一、数字通信电气接口: (2)二、DeviceNet 通讯配置: (2)三、DeviceNet 通讯协议: (3)四、焊机侧操作说明: (4)4.1 焊机内部菜单设置说明: (4)4.2 各操作模式设置说明: (6)五、参数配置曲线: (7)一、数字通信电气接口:机器人数字接口航空插引脚顺序如图 3-43 所示,引脚定义见表 3-27。
图 1 航空插引脚顺序二、 DeviceNet 通讯配置:其中:1、主站MAC ID 为机器人的MAC ID,在不与焊机MAC ID 重复的情况下可以在0-63范围内任意设置;2、从站MAC ID 为焊机的MAC ID,默认为2,在不与机器人MAC ID 重复的情况下可以通过焊机内部菜单FA3 在1-63 范围内任意设置,当FA9 为KUK、FA3 为OFF 时,使用默认MAC ID 2;三、 DeviceNet 通讯协议:备注:数字信号默认情况下均以1 为有效值。
四、焊机侧操作说明:4、1焊机内部菜单设置说明:内部菜单中F16、F17、FA0-FA9 为机器人配套焊机独有的参数,其余为手工焊机与机器人焊机共有,详见焊机说明书,内部菜单设置步骤如下:开始1、F01 为恢复出厂设置,长按“执行”键3 秒恢复出厂设置,该操作不会恢复FA0-FA9 选项的机器人设置参数。
2、F16 为反抽丝送丝速度,OFF 为默认值1.4 米/分钟;3、F17 为反抽丝时间,OFF 表示反抽丝时间由指令持续时间控制,如果不为OFF 则表示,每一次反抽丝指令都只执行设置的固定时间,用于控制每次回抽焊丝的长度;4、FA0 为机器人功能开关,OFF 为关闭机器人功能,焊机会变为手工焊机;ON为打开机器人功能,焊机为机器人配套焊机;5、FA1 为近控开关,OFF 为关闭近控功能,ON 为打开近控功能;数字口通讯时该功能自动切换,无需调节;模拟口通讯时需要手工打开近控开关才是使能近控模式。
KUKA机械手入门教程

说
明
点到点运动 最多23个字符 Tool_data[1]…[16] Base_data[1]…[16] “ ” ,Cont 1到100%(省缺:100%)
加速度和近似距离选项
23
LIN 线性运动 机器人按照TCP或工具参考点沿直线移动到终点 机器人需要在确定的速度下按照一个精确的路径
到一个点,使用线性运动 选择LIN指令后,其输入格式值在程序窗口打开:
24
名称
功能
说
明
LIN P1 工具 坐标 CONT Vel=2m/s
运动类型 点的名字 工具号 基座标号 近似定位接通 速度
线性运动 最多23个字符 Tool_data[1]…[16] Base_data[1]…[16] “ ” ,Cont 0.001到2m/s(省缺:2m/s)
CPDAT1
运动参数
前程序,并处理一个定义的子程序; 由中断而调用的子程序被称为中断程序; 允许最多同时声明32个中断; 在同一时间最多允许16个中断激活。
37
使用中断时的步骤:
中断声明; 启动/关闭或禁止/开通中断; 需要时停住机器人; 需要时废弃当前的轨迹规划,运行一条新的轨 迹。
38
举例 说明:
39
外部控制
17、儿童是中心,教育的措施便围绕 他们而 组织起 来。上 午10时36分5秒 上午10时36分 10:36:0521.6.21
1、Genius only means hard-working all one's life. (Mendeleyer, Russian Chemist)
天才只意味着终身不懈的努力。21.5.265.26.202108:3008:30:57May-2108:30
KUKA KRC4 机器人初次通电说明文档
2,机器人安全回路接口,接线图根据控制柜型号不同,接线方式也不一样。
(2)KR C4 Compact & KR C4 Smallsize 控制柜:
急停、安全门信号说明:建议接入相应的安全装置里, 如果确定不需要接入,将相应的通道短接即可,如下 所示:
X11接头接线方式: 急停A组:1和2短接 急停B组:10和11短接
这种消息提示,需要我们确认机器人的安全配置。在某些情况下,配置项目下载到机 器人激活时,也会有同样的消息,同样通过确认机器人安全配置来处理。
机器人初次通电——安全配置
安全配置目的:是为了控制柜系统的数据、KSS软件的机器参数与实际机器人一致。 对于初次上电机器人,必须对此进行确认,才能正常操作机器人。步骤如下: 1,登陆到“Safety Maintenance”(安全调试人员):
下:
CCU ·
CC机器人系统的接地,如下图的示例:等电位连接
机器人初次通电——电气连接 10,机器人配套线缆的现场布线,如下图:
机器人初次通电——初次上电 在做好电气连接后,在机器人通电前,必须用万用表测量控制柜的供电大小,确认电 源没有缺相,电压的等级符合机器人对电源的要求,确认完毕后即可通电。
机器人初次通电——安全配置
安全配置目的:是为了控制柜系统的数据、KSS软件的机器参数与实际机器人一致。 对于初次上电机器人,必须对此进行确认,才能正常操作机器人。步骤如下: 3,完成上述两步,示教器界面会弹出“故障排除助手”对话框,选择“机器人或 RDC 存储器首次投入运行”字段,然后单击下面的“现在激活”:
机器人初次通电——电气连接 机器人本体接口图示如下:
机器人初次通电——电气连接
以上为控制柜和机器人的示例接口,控制柜型号和机器人型号不一样,对应接口会略 有差别,但标签会是一样的,请留意。 对应接口的接线及说明如下: 1,X1接头:控制柜供电接口。
Kuka-c2-ed05-interbus-cmd-的配置

Interbus interface
Master remotebus output X14
F u n ktio n K lem m e
0V
I/O-syBiblioteka tem in the KR C1Systemkoppler IBS ISA SC/RI/I-T
System coupler IBS ISA SC/RI/I-T in the robot controller
System coupler IBS ISA SC/RI/LK
Remote OUT 2 Remote IN 2
Group 6 Alternative 1
Group 6 Alternative 2
Logical addressing in CMD
Context menu for process data assignment
overall assignment
individual assignment
Creating process data descriptions
Context menu of the inserted module
Change device description
Special IBS editing features
Adapting the cable connection Double insertion of special bus terminals into the bus structure in CMD
Transferring the configuration into the controller
kuka机器人操作说明(草稿)(精选5篇)

kuka机器人操作说明(草稿)(精选5篇)第一篇:kuka机器人操作说明(草稿)系统自动运行操作流程(草稿)1,打开气源2,机器人开机3,T1模式,手动操作,进入专家界面(菜单“配置”下选择“用户组”,选择“专家“,输入密码“KUKA”)4,首先查看,菜单“显示”下选择“WINACPANEL”,查看PLC是否运行,或者查看三色灯黄灯是否亮5,然后,I/O重新配置,菜单“配置”下选择“输入输出”,再选择“输入输出重新配置” 6,选择CELL程序,手动运行CELL程序(RUN HOME时,即机器人运行到HOME时,要注意观察有无干涉),机器人到HOME点后,继续启动运行CELL程序(再按一次KCP上“启动“),运行到“AUTOEXT INI”这一行后;再选择菜单“程序“下其“程序复位”选项,然后,再手动运行CELL程序到HOME点这一行即可7,确认信息8,选择“EXT”模式,即外部自动模式9,按KOP上“复位”按钮(确认安全门)10,注塑机选择自动11,再按“启动”按钮12,再按注塑机上“启动”按钮13,系统启动另外:1,模具间有工件的处理:注塑机选择手动,再按一下KOP上“功能键“按钮;机器人手动回HOME点(注意干涉),CELL程序复位,系统再重新启动运行。
2,夹具掉件的处理:(掉件启用时)a,系统自动运行,掉件,确认信息,出现等待(WAIT FOR $IN[357]),此时,可以取消等待(按一下KOP上功能键),系统正常运行回HOME点(不带件)。
b,系统自动运行,掉件,确认信息,没有出现等待,则系统正常运行回HOME点后(不带件),再按一下KOP上“功能键“按钮。
c,若是系统自动运行,掉件,机器人停在中间,则确认信息,手动把机器人带回安全位置,然后,再重做上面“系统自动运行操作流程“第5步开始以后的步骤即可。
注意:如果掉件暂时不用报警信息提示,则可以把R1Systemsps.sub文件打开,文件里面:IF $IN[291] THENIF $IN[291] THENGRP_MSG(1)改为;GRP_MSG(1)即可。
Kuka Robot Interbus Trouble Shooting
DI9
O-3.1 IMT05( 10)-02F 接口接线
5
4
3
2
1
BMW-Brilliance Automotive Ltd. BodyShop Maintenance , Tel.: +86 (0) 024/84556149, Fax: +86(0) 024/84556411,
Save parameterization
Using IBS CMD G4, this command transmits the parameterization into the parameterization memory of the controller board. Depending on the selected, the communication reference list of @utomationXplorer or IBS CMD G4 is used. After parameterizing you have to activate your changes using the command In this case a set display of changeis reset. 使用@utomationXplorer存储参数化能将项目文件写入存储卡。机器人关机后项 目文件将保持。
DI5
KR C2 IBS PCI SC/TI-LK /外部电源
BMW-Brilliance Automotive Ltd. BodyShop Maintenance , Tel.: +86 (0) 024/84556149, Fax: +86(0) 024/84556411,
BMW-Brilliance Automotive Ltd. BodyShop Maintenance , Tel.: +86 (0) 024/84556149, Fax: +86(0) 024/84556411,
(完整版)KUKA简单操作说明书
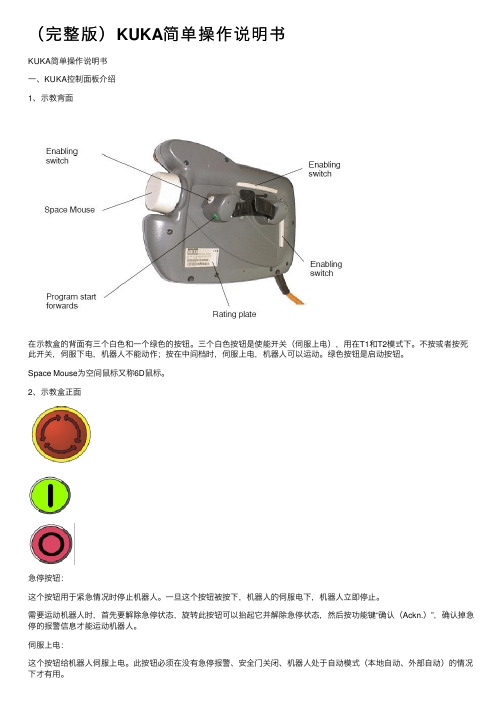
(完整版)KUKA简单操作说明书KUKA简单操作说明书⼀、KUKA控制⾯板介绍1、⽰教背⾯在⽰教盒的背⾯有三个⽩⾊和⼀个绿⾊的按钮。
三个⽩⾊按钮是使能开关(伺服上电),⽤在T1和T2模式下。
不按或者按死此开关,伺服下电,机器⼈不能动作;按在中间档时,伺服上电,机器⼈可以运动。
绿⾊按钮是启动按钮。
Space Mouse为空间⿏标⼜称6D⿏标。
2、⽰教盒正⾯急停按钮:这个按钮⽤于紧急情况时停⽌机器⼈。
⼀旦这个按钮被按下,机器⼈的伺服电下,机器⼈⽴即停⽌。
需要运动机器⼈时,⾸先要解除急停状态,旋转此按钮可以抬起它并解除急停状态,然后按功能键“确认(Ackn.)”,确认掉急停的报警信息才能运动机器⼈。
伺服上电:这个按钮给机器⼈伺服上电。
此按钮必须在没有急停报警、安全门关闭、机器⼈处于⾃动模式(本地⾃动、外部⾃动)的情况下才有⽤。
伺服下电:这个按钮给机器⼈伺服上电。
模式选择开关:T1模式:⼿动运⾏机器⼈或机器⼈程序。
在⼿动运⾏机器⼈或机器⼈程序时,最⼤速度都为250mm/s。
T2模式:⼿动运⾏机器⼈或机器⼈程序。
在⼿动运⾏机器⼈时,最⼤速度为250mm/s。
在⼿动运⾏机器⼈程序时,最⼤速度为程序中设定的速度。
本地⾃动:通过⽰教盒上的启动按钮可以使程序⾃动运⾏。
外部⾃动:必须通过外部给启动信号才能⾃动执⾏程序。
退出键:可以退出状态窗⼝、菜单等。
窗⼝转换键:可以在程序窗⼝、状态窗⼝、信息窗⼝之间进⾏焦点转换。
当某窗⼝背景呈蓝⾊时,表⽰此窗⼝被选中,可以对这个窗⼝进⾏操作,屏幕下⽅的功能菜单也相应改变。
暂停键:暂停正在运⾏的程序。
按“向前运⾏”或“向后运⾏”重新启动程序。
向前运⾏键:向前运⾏程序。
在T1和T2模式,抬起此键程序停⽌运⾏,机器⼈停⽌。
向后运⾏键:向后运⾏程序。
仅在T1和T2模式时有⽤。
回车键:确认输⼊或确认指令⽰教完成。
箭头键:移动光标。
菜单键:⽤菜单键打开相应菜单,通过箭头键选择⼦菜单,回车键使选中的菜单被应⽤。