基于超声波倒车雷达防撞系统设计
基于超声波检测的倒车雷达的设计

基于超声波检测的倒车雷达的设计摘要:倒车时容易发生事故,因此开发出一种基于超声波检测的倒车雷达系统。
该系统通过发送超声波信号并接收其回波来检测后方的障碍物。
本文详细介绍了这种基于超声波检测的倒车雷达的设计原理和步骤。
一、引言随着交通工具的普及,倒车事故日益增多。
为了避免这些事故的发生,倒车雷达应运而生。
倒车雷达通过使用超声波检测技术来检测后方的障碍物,并向驾驶员提供警告信号,以减少事故的发生。
二、设计原理基于超声波检测的倒车雷达系统包括传感器、控制电路和显示器。
传感器用于发送超声波信号并接收其回波。
控制电路用于处理接收到的信号,并根据信号的强度来判断障碍物的位置和距离。
显示器用于向驾驶员显示检测结果。
三、设计步骤1.硬件设计:选择合适的传感器、控制电路和显示器。
传感器需要能够发射和接收超声波信号,控制电路需要能够处理接收到的信号,并根据信号的强度来判断障碍物的位置和距离,显示器需要能够向驾驶员显示检测结果。
2.电路连接:将传感器、控制电路和显示器连接起来,确保它们能够正常工作。
3.系统编程:编写程序来控制传感器的工作,并对接收到的信号进行处理。
程序应能够根据接收到的信号强度来确定障碍物的位置和距离,并向显示器发送相应的警告信息。
4.系统测试:对设计的倒车雷达系统进行测试,确保它能够正常工作并提供准确的检测结果。
四、设计考虑1.传感器选择:选择适用于倒车雷达系统的超声波传感器。
传感器应具有较高的灵敏度和稳定性,能够正常工作在车辆倒车时的环境下。
2.电路设计:设计一个合适的控制电路来处理传感器接收到的信号,并根据信号的强度来判断障碍物的位置和距离。
3.数据处理:根据接收到的信号强度,将其转换成可读的距离信息,并向驾驶员提供警告信息。
4.系统可靠性:确保设计的倒车雷达系统能够在各种环境条件下正常工作,并提供准确的检测结果。
五、结论。
基于超声波的倒车雷达
基于超声波的倒车雷达摘要:随着生活质量的提高,工作的需要,科技的发展,人们将越来越多的在生活中和工作中将汽车作为其日常的生活工具。
给汽车安装倒车雷达系统,将使汽车安全性大大提高,以确保行车安全。
本文的内容是基于超声波测距的倒车防撞系统的设计,将超声波测距系统和AT89S52单片机结合于一体,设计出一种基于AT89S52单片机得倒车防撞系统。
驾驶员能够通过系统的声音、显示,清楚车后障碍物的状况,并通过报警信号避免撞车,安全倒车。
关键词:倒车雷达单片机超声波报警显示一、技术指标:1、系统设计要求汽车倒车雷达预警系统由三个部分组成,分别为测距部分、控制系统部分和显示报警部分。
本系统的主要功能是:1.当汽车倒车时能实时显示、LED显示车与障碍物的距离值:XXX厘米。
使驾驶员能随时看到车后的障碍物距离汽车的距离。
2.超声波探测距离不小于1米,当在探测的范围有障碍物时,蜂鸣器提示报警。
3.汽车与障碍物不同距离时,发出不同的警报声。
距离越近蜂鸣器的报警频率也越大,当距离小于最小安全距离时,蜂鸣器不间断报警。
二、方案比较与论证:2.1测距系统方案设计目前汽车倒车雷达预警系统测距技术主要有激光、毫米波雷达、摄像系统、红外线、超声波等一些测距技术,不同的目标探测方式其工作过程和原理有不同之处,但它们的主要目的都是通过前方返回的探测信息判断前方车辆和本车间的相对距离,并根据两车间的危险性程度做出相应的预防措施。
由于超声波指向性强,能量消耗缓慢,在介质中传播的距离较远,并且利用超声波检测往往比较迅速、方便、计算简单、易于做到实时控制,并且在测量精度方面能达到工业实用的要求,因而超声波经常用于距离的测量,如测距仪和物位测量仪等都可以通过超声波来实现。
由上述叙述可知,超声波测量能够达到系统中所要求的测量精度,一般应用在汽车倒车系统上。
2.2控制系统方案设计在控制系统的方案选择上,由于整个系统的设计涉及到数据处理,控制实时性等问题,选用基于微控制器的系统,电路的实现不仅简单而且成本低、功耗低、能大大缩小整个系统的体积。
基于超声波测倒车雷达系统设计
基于超声波测倒车雷达系统设计一、引言随着汽车的普及和交通拥堵的加剧,倒车事故频繁发生,严重影响行车安全。
为了解决这个问题,倒车雷达系统应运而生。
本文将基于超声波测倒车雷达系统进行设计。
二、超声波测倒车雷达原理超声波测倒车雷达主要基于超声波达到障碍物后,反射回来的时间来计算与障碍物的距离。
其工作原理如下:1.发射器发射超声波信号。
2.超声波信号达到障碍物后,被障碍物反射回来。
3.接收器接收反射回来的超声波信号,并计算往返时间。
4.根据往返时间,计算出与障碍物的距离。
5.判断距离是否小于设置的安全距离,并作出相应警示。
三、系统设计1.传感器模块传感器模块主要负责发射超声波信号,并接收反射回来的超声波信号。
传感器模块需要考虑以下几个因素:(1)发射频率:选择合适的超声波发射频率,既要保证足够的测量距离,又要避免其他干扰频率。
(2)发射角度:确定超声波发射的角度,以确保能够覆盖到车辆后方的障碍物。
(3)接收灵敏度:传感器的接收灵敏度要足够高,能够有效地接收到反射回来的超声波信号。
2.控制器模块控制器模块主要负责接收传感器模块传回来的超声波信号,并计算距离。
控制器模块还需要进行以下操作:(1)时序控制:控制发射和接收的时序,确保能够准确计时,并保持连贯的测量过程。
(2)距离计算:根据往返时间,计算出与障碍物的距离。
(3)安全距离判断:判断距离是否小于设置的安全距离,如果小于,则发出警示信号。
3.显示器模块显示器模块主要负责显示车辆后方的障碍物距离。
显示器模块需要注意以下几点:(1)显示方式:可以选择数字显示或图形显示,根据实际需求确定。
(2)显示颜色:合适的颜色搭配可以提高显示的清晰度和辨识度。
(3)警示方式:当距离小于安全距离时,可以通过声音或者光线等方式进行警示。
四、系统优化为了提高系统的性能和安全性,可以进行以下优化:1.多传感器布局:在车辆后方布置多个传感器,可以提高测量准确性和可靠性。
2.数据处理算法优化:可以采用滤波算法和数据处理算法对测量数据进行优化,提高测量精度。
基于单片机的超声波倒车雷达的实现设计
基于单片机的超声波倒车雷达的实现设计超声波倒车雷达是一种有效的辅助驾驶系统,可以在倒车时帮助驾驶员避免碰撞和减少事故的发生。
本文将介绍如何基于单片机实现超声波倒车雷达的设计。
首先,我们需要了解超声波倒车雷达的原理。
超声波倒车雷达通过发射超声波信号并接收反射信号来测量与障碍物的距离。
首先,超声波模块会发射一束超声波信号,然后该信号会与障碍物发生反射。
接下来,超声波模块会接收到反射信号,并根据信号的时间差计算出与障碍物的距离。
最后,将这个距离显示在LCD屏幕上,提醒驾驶员注意。
接下来,我们需要选择合适的硬件和软件来实现这个设计。
在硬件方面,我们需要一个超声波模块(包括超声波传感器和放大器)和一个LCD 屏幕来显示距离。
在软件方面,我们可以使用C语言编程来控制单片机,计算距离并将其显示在LCD屏幕上。
开始实施这个设计之前,我们首先需要连接硬件。
超声波模块的引脚需要连接到单片机的GPIO引脚。
LCD屏幕通常有自己的驱动器,我们需要查看其手册以了解如何连接到单片机。
接下来,我们需要编写程序来控制单片机。
首先,我们需要初始化超声波模块和LCD屏幕。
通过GPIO引脚向超声波模块发送触发信号,然后计算超声波信号的时间差并转换为距离,最后将距离显示在LCD屏幕上。
在编写程序时,我们还可以添加一些附加功能,例如设置距离阈值来触发警报,或者根据距离改变警报的频率。
这些功能可以通过使用if语句或循环来实现。
完成编写程序后,我们需要进行测试和调试。
我们可以通过在倒车时将板子连接到车辆上来测试超声波倒车雷达的功能。
如果一切正常,我们可以观察到LCD屏幕上显示出与障碍物的距离。
最后,在安装超声波倒车雷达之前,我们需要将设备进行封装,以保护电路板和传感器不受外部影响。
我们可以使用3D打印技术创建一个外壳,并将电路板和传感器固定在内部。
在本文中,我们介绍了如何基于单片机实现超声波倒车雷达的设计。
通过了解原理、选择合适的硬件和软件、连接硬件、编写程序、测试和调试以及封装设备,我们可以成功实现这个设计,并为汽车的倒车过程提供一个有效的辅助系统。
基于超声波测距的汽车倒车防撞报警系统设计
基于超声波测距的汽车倒车防撞报警系统设计一、本文概述本文针对汽车安全驾驶领域的重要需求,详细探讨并设计了一种基于超声波测距技术的汽车倒车防撞报警系统。
随着城市交通环境复杂性的增加以及人们对行车安全意识的提高,如何有效防止因驾驶员视线盲区和操作失误引起的倒车碰撞事故成为研究热点。
本系统利用超声波传感器作为主要探测元件,通过发射和接收超声波信号来精确测量车辆与后方障碍物之间的实时距离,并结合智能算法分析处理这些数据,以便在车辆靠近障碍物到危险距离时及时发出报警提示,辅助驾驶员做出正确决策,从而显著提升倒车安全性。
文章首先阐述了该系统的背景意义和技术原理,随后深入剖析超声波测距方法及其在汽车应用中的优势和挑战接着,详细介绍了系统架构设计,包括硬件组成(如超声波传感器模块、信号处理电路、报警装置等)及软件算法实现通过实验验证了系统的性能指标,探讨其在不同工况下的稳定性和准确性,并对未来可能的优化方向进行了展望。
通过本文的研究,期望能为汽车主动安全技术的发展贡献一份力量,推动相关产品的实际应用与普及。
二、超声波测距原理及技术超声波测距技术是利用超声波在空气中的传播特性来实现距离测量的方法。
超声波是一种频率高于人耳能听到的上限(约20kHz)的声波,它在空气中的传播速度相对恒定,约为343米秒。
这一特性使得超声波非常适合用于精确的距离测量。
超声波测距的基本原理是发射器发射出一定频率的超声波,当这些波遇到障碍物时会发生反射,反射波被接收器接收。
通过测量超声波发射和接收之间的时间差,可以计算出超声波传播的距离。
由于超声波的传播速度是已知的,因此可以通过以下公式计算距离:这里的“时间差 2”是因为超声波需要从发射器传播到障碍物,再从障碍物反射回接收器,所以总时间是往返时间。
在汽车倒车防撞报警系统中,超声波传感器通常被安装在汽车的尾部。
当驾驶员开始倒车时,系统会自动激活传感器,传感器开始发射超声波。
超声波遇到车辆后方的障碍物时反射回来,被传感器接收。
基于超声波测距的汽车倒车防撞报警系统设计
基于超声波测距的汽车倒车防撞报警系统设计汽车倒车防撞报警系统是一种基于超声波测距技术的安全辅助设备,能够帮助驾驶员在倒车时避免与障碍物发生碰撞,提高行车安全性。
本文将对该系统的设计进行详细介绍。
首先,该系统主要由超声波传感器、控制器和报警器组成。
超声波传感器负责探测车辆周围的障碍物距离,传输给控制器进行处理。
控制器根据传感器的数据判断是否存在碰撞的风险,并通过报警器向驾驶员发出警告信号,提醒其采取正确的行动。
在系统的设计过程中,首先需要选择合适的超声波传感器。
传感器的选择应考虑其测距范围、精度和对环境的适应性等方面。
一般来说,超声波传感器在测距范围内可以提供较高的测量精度,并且对大多数障碍物均有良好的适应性。
接下来,控制器的设计是系统中的关键部分。
控制器需要实时接收传感器上传的距离数据,并进行数据处理和决策。
控制器可以使用嵌入式系统来实现。
在数据处理方面,可以使用一些常见的算法,如滤波算法、虚拟线算法等,来进行数据处理和障碍物的识别。
在决策方面,可以设置适当的距离阈值,当距离低于该阈值时触发警报。
最后,报警器的设计需要考虑其音量和可靠性。
对于音量,报警器应具备足够的声音大小,以确保驾驶员能够听到警报并及时做出反应。
对于可靠性,报警器应具备较长的寿命和稳定的性能,以确保系统能够长时间稳定运行。
此外,为了提高系统的可用性,还可以考虑加入其它功能,如图像显示功能。
通过搭载摄像头和显示器,可以将车辆周围的情况实时显示在显示器上,使驾驶员更加直观地了解障碍物的位置和距离。
总之,基于超声波测距的汽车倒车防撞报警系统是一种重要的安全辅助设备。
通过合理选择超声波传感器、设计有效的控制器和报警器,并加入其它功能,可以实现对倒车过程的有效监控和警示,提高驾驶员的行车安全性。
基于超声波倒车雷达防撞系统设计
关键词 : T8S 2 超声测距 ; A 95 ; 温度补偿
中图 分 类 号 : 2 7 Ⅱ,7 文 献 标 识 码 : A
TheDe i n Ba e Ulr s n co t mo l c dr f l so o da eSy t m sg s d t a o i fAu o bieBa k- a tCo l i n Av i nc se i
对于交通事故 的分析表明 :5 7%以上的交通事故 是发 生在 车 速低 于 3 k / 0 mh的低速 , 因驾驶 员反 应 不及 时所 引起 的交 通事 故 占 8 % 以上 , 0 如果 司机能 够 提早
1 钟 意 识 到 有 事 故 危 险并 且 能 采 取 相 应 的 正 确 措 秒
声波 幅值 检测 法 、 位检 测法 、 相 渡越 时 间检测 法 。声 波
下 , 计 一种 响应 快 , 设 可靠 性 高且 较为 经 济 的汽车 低速 防撞 预警 系统势 在必 行 。
汽车低速防撞预警系统是汽车泊车或慢速倒车时 的安全辅助装置 ,能以距离显示和声音警示提醒驾驶 员后 方 障碍 物 的情 况 。 近年 来 , 随着 微 电子技 术发 展而 产生的小型价廉微处理器( 单片机) 的出现 , 使超声波测 距传 感器 的功能 得 到 了提 升 ,也使 得 超声 测距 系 统得 以更 加广 泛 的应 用 。
单 片机作为主控制器, 根据超声 波测距原理 , 实现 了倒 车防撞报 警等功能。考虑到一般 倒车防撞 系统精度 不高的缺 点, 文 章提 出了采用温度补偿 的方 法对 系统进行校正 。提 高测量精 度。试验结果表明 ,该 系统能精确到 lm,测 距范 围可达 c
0. m  ̄5 。 01 m
d sa e itnc m e urm e o . m t 5r s a e nti f m 001 s r o rL
基于超声波测距的倒车报警系统设计
图2超声波发射电路
波频率38kHz与测距的超声波频率40kHz较为接近,所
以可以利用它制作超声波检测接收电路。
CX20106接收超
声波具有很高的灵敏度和较强的抗干扰能力。
为了改变接
收电路的灵敏度和抗干扰能力,可以调整电容C,当无信
号时,输出高电平,当接收到回波信号后跳变为低电平。
图3超声波接受电路
2.3数码显示模块
超声波是机械波的一种是通过机械产生的声波,当他在空气中传播的时候,会受到空气温度和环境的影响,当
我们需要其进行精确测量的时候,就需要在系统中安装温
度模块来对当时的声波速度进行校正,来达到精确的目图1超声波测距报警系统原理图
图5超声波测距报警系统程序流程图
图4超声波报警电路
系统软件件设计
软件控制系统是系统的重要组成部分,本次雷达系
统选择运用C语言程序进行系统编写。
在本次设计的雷。
基于超声波的汽车倒车防撞报警系统软件设计【开题报告】
毕业设计开题报告测控技术与仪器基于超声波的汽车倒车防撞报警系统软件设计1选题的背景、意义[1][2]随着经济的发展,人们的生活水平越来越高。
当今,对许多人来说,汽车进入家庭已不再是奢望,汽车的数量在大幅攀升,交通拥挤状况也日趋严重,撞车事件屡屡发生,造成了不可避免的人身伤亡和经济损失。
因此随之而来的事情就是如何保证汽车使用过程中的安全问题,特别是如何防止汽车与其他物体碰撞的事情发生。
据初步调查统计,l5%的汽车事故是由汽车倒车"后视"不良造成的。
因此,增强汽车的后视能力,对于提高行车安全,减轻司机的劳动强度和心理压力,是十分重要的。
如果车辆能适时检测与周围障碍物的距离并给出警告信息,使司机及早采取行动,可避免车辆相撞事故的发生。
随着科学技术的发展,用超声波进行无接触测量得到了广泛的应用。
超声波是由机械振动产生的,可在不同介质中以不同的速度传播,它具有定向性好、能量集中、在传输过程中衰减较小,反射能力较强,在恶劣工作环境下具有一定的适应能力等优点。
因此可用于液位测量、车辆自动导航等领域。
利用超声波测距技术的汽车倒车防撞雷达(以下简称倒车雷达),近年来逐渐在行业风行。
一些名车如奔驰、法拉利、本田雅阁等相继采用了该系统用于辅助倒车,在现时的车展上屡见不鲜。
究其原因是因为倒车镜有死角,驾车者目测距离有误差等原因造成倒车时的事故率远大于汽车前进时的事故率,尤其是非职业驾驶员以及女性更为突出。
而倒车事故给车主带来许多麻烦,例如撞上别人的车、消防水笼头,如果伤及儿童更是不堪设想。
据此,这些车厂将倒车雷达作为一个卖点,声称倒车雷达在车主的一生中只要发挥一次作用就很值得了。
既然倒车雷达能够增加汽车的整体安全性能,何以只到近年才得以发展呢?众所周知,超声波测距技术由来已久,多年来已在一些领域得到应用。
例如利用超声波技术的自动测距照相机、建筑商使用的手持式墙面测距仪。
而用于汽车防撞却是近年的事。
这主要原因是传统的超声波传感器不能达到汽车行业的特殊要求。
基于超声波测距的倒车雷达系统设计
基于超声波测距的倒车雷达系统设计时间:2010-12-07 18:50:17 来源:作者:1 引言近年来,随着汽车产业的迅速发展和人们生活水平的不断提高,我国的汽车数量正逐年增加。
同时汽车驾驶人员中非职业汽车驾驶人员的比例也逐年增加。
在公路、街道、停车场、车库等拥挤、狭窄的地方倒车时,驾驶员既要前瞻,又要后顾,稍微不小心就会发生追尾事故。
据相关调查统计,15%的汽车碰撞事故是因倒车时汽车的后视能力不良造成的。
因此。
增加汽车的后视能力,研制汽车后部探测障碍物的倒车雷达便成为近些年来的研究热点。
安全避免障碍物的前提是快速、准确地测量障碍物与汽车之间的距离。
为此,设计了以单片机为核心,利用超声波实现无接触测距的倒车雷达系统。
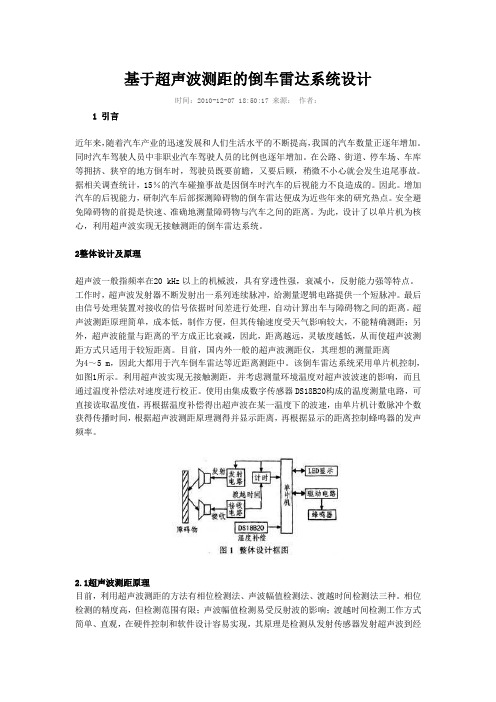
2整体设计及原理超声波一般指频率在20 kHz以上的机械波,具有穿透性强,衰减小,反射能力强等特点。
工作时,超声波发射器不断发射出一系列连续脉冲,给测量逻辑电路提供一个短脉冲。
最后由信号处理装置对接收的信号依据时间差进行处理,自动计算出车与障碍物之间的距离。
超声波测距原理简单,成本低,制作方便,但其传输速度受天气影响较大,不能精确测距;另外,超声波能量与距离的平方成正比衰减,因此,距离越远,灵敏度越低,从而使超声波测距方式只适用于较短距离。
目前,国内外一般的超声波测距仪,其理想的测量距离为4~5 m,因此大都用于汽车倒车雷达等近距离测距中。
该倒车雷达系统采用单片机控制,如图1所示。
利用超声波实现无接触测距,并考虑测量环境温度对超声波波速的影响,而且通过温度补偿法对速度进行校正。
使用由集成数字传感器DS18B20构成的温度测量电路,可直接读取温度值,再根据温度补偿得出超声波在某一温度下的波速,由单片机计数脉冲个数获得传播时间,根据超声波测距原理测得并显示距离,再根据显示的距离控制蜂鸣器的发声频率。
2.1超声波测距原理目前,利用超声波测距的方法有相位检测法、声波幅值检测法、渡越时间检测法三种。
基于超声波的倒车防撞报警系统设计

与 应 用
壁 麴
摘 要 :超声 波倒车防撞 报警系统又称 为倒车雷 达 ,是为 了解 决倒车过 程发生的 碰撞问题 ,提高驾驶
员驾驶的 安全而设计 的 系统核心 为超声 波测 距系统 ,由主控芯片 、超声波发 射电路 、超 声波接 收
Ke wo d : y rs r v rig e e sn rd r a a; u ta o i l snc r r n i g a gn ;
Hale Waihona Puke 本 文 所 设 计 的 超 声 波 汽 车 倒 车 防 撞 报 警 系 统 是 保 障
汽 车起动和 泊车 安全 的辅助 系统 。超 声波 汽车倒 车防撞 报警 系统 具有抗 干扰 能力强 、成本低 、反 应速度 快 、功 耗低等特 点 。超声波测距 系统安装 的液 晶 L D10 C 6 2显示
二、超声波测 距原理 本文超 声波测距所 采用 的方法 是渡越 时问法 ( OF 。原理 :在 空气中 ,超 声波 发射器 向某 一方 向发 T ) 射 超声波 ,在发射 时刻 同时打开计 时器开始 计时 ,超 声波在传 播 的过 程 中碰 到障碍物 就马上 反射 回来 , 超 声波接 收器接收 到回波就立 即停止计时 。 时通过计 时器 就可 以知 道超声波往 返所用 的时间 t 在 2  ̄ 此 , 0C 室温 时超 声波 的速 度 为 v 3 0 s = 4 m/,根据 公式 S:VX / t 2,计算 出障碍 物离 发射 点之 间 的距离 【。经 过 1 】 SC 9 5 T 8 C 1单片机处 理后 ,液 晶 L D10 C 6 2显示 出距离 ,同时设定 一个 临界值 ,低于这个 临界值就报警 。 超声波测 距系统 的原理如 图 1 示 。 所
级自动化——超声波倒车雷达系统设计方案
摘要采用超声波测距原理,驾驶者在倒车时,将汽车的挡位推到R挡,启动倒车雷达,在控制器的控制下,由装置于车尾保险扛上的探头发送超声波,遇到障碍物,产生回波信号,传感器接收到回波信号后经控制器进行数据处理,从而计算出车体与障碍物之间的距离,判断出障碍物的位置,再由LED显示器和蜂鸣器声发出警示信号,从而使驾驶者倒车时不至于撞上障碍物。
整个过程,驾驶者无须回头便可知车后的情况,使停车和倒车更容易,更安全。
本文在查阅、分析国内外倒车雷达系统相关技术的基础上,结合最新研究成果,对基于超声波测距的倒车雷达预警系统的研制进行了深入探讨和研究。
该系统分为测距模块、系统控制模块和显示报警模块,并分别对其进行方案分析,构建了倒车雷达预警系统的系统构架和设计方案;在硬件电路中,详细阐述了运用单片机技术实现的可视倒车雷达预警系统的测距实现原理,分析了以AT89S52单片机为主控单元的系统硬件设计,并通过系统仿真研究,验证了系统的可靠性和可行性。
关键字:超声波;倒车雷达;传感器;AT89S52单片机ABSTRACTThe ultrasonic distance principle, drivers in reverse, the gears to push the car back and start against R radar, under the control of the controller, the device to carry on the rear insurance send ultrasonic probe, obstacle, sensor, echo signal after receiving echo signal controller, which calculated data processing, the distance between the body and the obstacles and obstacles, then LED by a warning signal and noise, thus make the drivers reverse not mask obstacles. The whole process, without turning and car drivers that after, parking and reverse easier, more safety.Based on the analysis of domestic consulting, reverse radar system on the basis of relevant technology, combining the latest research results of the based onultrasonic ranging back-draft radar warning system is discussed and studied. This system is divided into rangefinder module, the system control module and display alarming module, and carries on the analysis, to construct the backing of the early-warning radar system architecture and design scheme, In the hardware circuit, this paper expounds the application of visualization technology realization of location back-draft radar warning system, and analyzes the realization principle for the control unit of AT89S52 SCM system hardware and software design, and through the system simulation verified the feasibility and reliability of the system.Key words: ultrasonic sensors, radar, reversing AT89S52 SCM.目录1 绪论11.1倒车雷达防撞的意义11.2倒车雷达的发展过程21.3本文主要内容42 系统构建与方案设计52.1系统设计要求52.2系统构建52.3系统方案设计62.3.1测距系统方案设计62.3.2控制系统方案设计102.3.3显示报警系统方案设计112.3.4系统探测范围及传感器布点的确定112.4本章小结133 系统硬件设计143.1系统硬件设计思想143.2测距系统设计153.2.1超声波发射模块电路设计153.2.2超声波接收模块电路设计183.2.3测温电路设计213.3控制系统设计233.3.1 AT89S52单片机最小系统设计243.3.2串行通信接口设计253.3.3换向选通电路设计262.3.4电源模块电路设计273.3显示报警模块电路设计293.3.1显示模块电路设计293.3.2报警模块电路设计303.4本章小结313 仿真324.1系统模糊控制器设计334.2建立输出与输入变量的数学关系模型364.3 SIMULINK仿真及参数的调整384.4仿真效果分析394.5本章小结415 总结与展望42致谢43参考文献44附录461 绪论自2002年以来,家用轿车成为继购房之后的又一大消费热点。
毕业设计-汽车倒车防撞报警系统超声波倒车雷达-论文[管理资料]
![毕业设计-汽车倒车防撞报警系统超声波倒车雷达-论文[管理资料]](https://img.taocdn.com/s3/m/fa35e01caeaad1f347933fdd.png)
超声波倒车雷达摘要倒车雷达又称泊车辅助系统,是汽车泊车安全辅助装置,能以声音或者更为直观的显示告知驾驶员周围障碍物的情况,解除了驾驶员泊车和起动车辆时前后左右探视所引起的困扰,并帮助驾驶员扫除了视野死角和视线模糊的缺陷,提高了安全性。
一般由超声波传感器(俗称探头)、控制器和显示器等部分组成,现在市场上的倒车雷达大多采用超声波测距原理,驾驶者在倒车时,启动倒车雷达,在控制器的控制下,由装置于车尾保险杠上的探头发送超声波,遇到障碍物,产生回波信号,传感器接收到回波信号后经控制器进行数据处理,判断出障碍物的位置,由显示器显示距离并发出警示信号,得到及时警示,从而使驾驶者倒车时做到心中有数,使倒车变得更轻松。
倒车雷达的提示方式可分为液晶、语言和声音三种;接收方式有无线传输和有线传输等。
本方案采用语音提示的方式,本文介绍了以SPCE061A单片机为核心的一种低成本、高精度、微型化,并有数字显示和声光报警功能的倒车雷达系统。
利用SPCE061A 单片机所具备的单芯片语音功能,外接三个超声波测距模组,组成一个示例的倒车雷达系统,语音提示报警(~)范围内的障碍物。
关键词:倒车雷达超声波单片机SPCE061A目录第1章前言 (1)第2章实现功能 (2)第3章核心器件简介 (3)SPCE061A (3)SPCE061A简介 (4)芯片特性 (4)SPCE061A精简开发板 (4)超声波测距模组 (5)转接板 (9)第4章系统总体方案 (11)第5章系统硬件设计 (12)SPCE061A精简开发板电路原理 (12)SPCE061最小系统 (12)电源模板 (12)放音模板 (13)超声波测距模组电路原理 (13)超声波谐振频率发生电路、调理电路 (13)超声波回波接受处理电路 (14)超声波测距模组电源接口 (14)超声波测距模式选择跳线 (15)超声波测距模组接口 (15)转接板电路 (15)显示电路 (16)第6章系统软件设计 (17)超声波测距原理 (17)软件结构 (18)各模块程序说明 (18)超声波测距程序 (18)语音播放程序 (22)显示刷新程序 (23)主程序 (25)第7章连接与操作说明 (26)参考文献 (29)致谢 (30)第一章前言倒车雷达又称泊车辅助系统,是汽车泊车安全辅助装置,能以声音或者更为直观的显示告知驾驶员周围障碍物的情况,解除了驾驶员泊车和起动车辆时前后左右探视所引起的困扰,并帮助驾驶员扫除了视野死角和视线模糊的缺陷,提高了安全性。
超声波倒车雷达的系统设计

超声波倒车雷达的系统设计摘要倒车雷达是针对日益拥挤的道路交通状况、以及在停车场、车库、街道等比较狭窄区域,避免车与车,车与人以及车与墙壁等障碍物发生碰撞,摩擦而出现的一种着眼于倒车防护的汽车防撞系统。
随着越来越多的高科技产品逐渐融入了日常生活中,倒车雷达系统发生了巨大的变化。
仿生学、声学等前沿学科的技术的日趋成熟与实用化,赋予了倒车雷达系统新的的研究方向与意义。
本文描述了一个由三个超声波测距模块构成的,提供语音报警功能的超声波倒车雷达系统。
该系统采用凌阳16位单片机SPCE061A 为核心,分别控制三个超声波模块,每一个超声波测距模块都被设定面向不同方向,以探测不同方向的障碍物。
本系统采用单片机控制时间计数和超声波的发射和接收,利用超声波回波的间隔时间,得出实测距离。
结果表明该系统具有结构简单、工作可靠、精度高等特点。
关键词:SPCE061A单片机;超声波测距;语音提示Ultrasonic Parking Sensor System DesignABSTRACTThe back-draft radar is aims at day by day the crowded road traffic condition, as well as in the parking lot, the garage, the street and so on the quite narrow region, avoids automobile and automobile, obstacle and so on Automobile and person as well as vehicle and wall has the collision, one kind which the friction appears focuses to the back-draft protection automobile collision avoidance system.As well as the high-tech products gradually integrated into the daily life, the Parking Distance Control system has undergone tremendous changes. The Parking Distance Control system has been given the new direction of the research and significance by the developed of the Bionics, Acoustic, etc. This article describes a Parking Distance Control system which contains three ultrasonic ranging modules and the results can be pronounced in real-time. The three ultrasonic ranging modules are set to three different directions to detect the roadblock .This three modules are control by the system which is based on sunplus SPCE061A microprocessor. The time counting and both the transmitting and receiving of the ultrasonic wave are controlled by the microprocessor. The measured distance can be calculated and displayed by the echo time by the code. The features of the simple hardware, stable operation and high precision are incarnated in the proposed system.Key Words: SPCE061A microprocessor ;Utrasonic ranging ;Vice prompts目录第一章绪论 (1)1.1课题背景 (1)1.1.1 倒车雷达的发展历史 (1)1.1.2 倒车雷达的发展方向与展望 (3)1.2课题任务及要求 (3)1.3课题的主要内容及目的 (3)第二章超声波倒车雷达系统的总体方案论证 (5)2.1超声波测距PWM信号方案论证 (5)2.1.1超声波测距PWM信号硬件实施方案 (5)2.1.2超声波测距PWM信号软件实施方案 (6)2.1.3超声波测距PWM信号实施方案比较 (6)2.2超声波倒车雷达系统硬件方案论证 (7)2.3超声波倒车雷达系统软件方案论证 (9)第三章超声波倒车雷达系统的硬件设计 (10)3.1 SPCE061A精简开发板电路原理 (10)3.1.1 SPCE061A简介 (10)3.1.2电源模块 (11)3.1.3放音模块 (11)3.2 超声波测距模块电路的设计 (12)3.2.1超声波谐振频率调理电路的设计 (12)3.2.2超声波回波信号处理电路的设计 (13)3.2.3超声波测距模式选择电路的设计 (14)3.3 转接板电路的设计 (15)3.4 显示电路的设计 (16)3.4.1二极管闪烁报警电路的设计 (16)3.4.2 LCD显示报警电路的设计 (16)3.5 各模块接口分配 (17)第四章超声波倒车雷达系统的软件设计 (19)4.1 超声波测距原理 (19)4.2 μ'nSP IDE的项目文件管理的组织结构 (19)4.3 软件架构 (20)4.4 各模块程序的设计 (21)4.4.1 主程序的设计 (21)4.4.2 超声波测距程序的设计 (22)4.4.3语音播放程序的设计 (24)4.4.4 二极管闪烁程序的设计 (25)4.4.5 LCD初始化及驱动程序的设计 (26)第五章总结 (27)参考文献 (28)附录程序清单 (29)致谢 (46)第一章绪论超声波雷达又称泊车辅助系统,是一种利用超声波原理,由装置于车尾保险杠上的探头发送超声波撞击障碍物后,反射此声波探头,从而计算出车体与障碍物之间的距离。
基于超声波的汽车倒车防撞报警系统硬件设计【文献综述】
毕业设计开题报告测控技术与仪器基于超声波的汽车倒车防撞报警系统硬件设计1前言部分(阐明课题的研究背景和意义)随着我国汽车产业的发展和人民生活水平的不断提高,越来越多的家庭拥有自己的汽车,在享受汽车给我带来便利的同时,一方面汽车的数量逐年增加,公路,街道,停车场和车库拥挤不堪,可转动的空间越来越少,另一方面,新司机非专职司机越来越多,由于倒车而产生的问题也日益突出,倒车引起的纠纷也越来越多。
倒车时,车辆之间,车辆与人之间,车辆与墙壁等障碍物之间的碰撞时有发生,在2002年的车辆事故发生的比例中,倒车引起的事故占21%,到2006年,倒车引起的事故比例占28%,到20008年甚至达到了30%。
倒车已成为一项令人头痛的任务,即使是经验丰富的老司机也在抱怨倒车是一件费力费神的事。
汽车倒车时,由于驾驶员看不见后面的物体和人,往往会引发事故。
由于在视觉盲区,无法看清楚身后的障碍物,司机倒车时很容易刮伤汽车,甚至发生事故,当倒车进入停车场指定泊位时,如果撞到石块或桩基,常常会将车后的消音器,后车灯和后车箱撞坏。
倒车是一个复杂的任务。
他依赖于驾驶员的驾驶经验,驾驶技巧以及反应灵敏程度。
任一环节出现错误都会导致驾驶员无法快速准确的完成倒车任务。
改善倒车遇到的窘境被越来越多的人所关注,人们对汽车操纵的便捷性能提出了更高的要求,希望有种装置能够解决汽车倒车给人们带来的不便,消除驾驶中的不安全因素,解决汽车倒车中存在的困难。
解决汽车的倒车难题目前有两种思路,一是寄希望于汽车自动驾驶技术及其配套设施的日益成熟,目前这项技术仍处于研制开发阶段,短期内尚未能开发应用,第二,据统计,危险境况时,如果能给驾驶员半秒钟的预处理时间,则可减少倒车事故的30%。
所以用简单的汽车倒车预警系统,亦能很大程度地解决倒车难题,但是传统的汽车倒车预警系统的功能简单,驾驶员仍然需要通过后视镜去判断车后的物体,以及通过估计汽车和车后障碍物的距离来完成倒车任务。
基于超声波测倒车雷达系统设计毕业设计
基于超声波测倒车雷达系统设计摘要本论文阐述的是基于超声波检测的倒车雷达的设计。
本课题利用超声波检测、单片机系统设计出一种汽车倒车雷达,并能将汽车与障碍物的距离用LED实时显示,同时对特定的距离进行声光报警。
本系统由两部分组成,硬件系统和软件系统。
硬件系统利用超声波发生电路驱动超声波发射探头发射超声波信号,再由超声波接收探头接收经障碍物反射回的超声波信号,并通过接收电路对信号进行调理,再将调理后的信号传入单片机系统,然后单片机系统将信号经过处理送显示,并且在规定的距离进行声光报警。
软件系统用汇编语言进行编程,采用模块化设计思想。
该系统通过联调后,实现了预期各种功能,符合设计要求。
关键词:倒车雷达超声波传感器单片机 LED显示AbstractThis paper introduces the design of car reversing radar based on the ultrasonic testing .The task uses ultrasonic testing andSingle Chip Micyoco(SCM) syetem to design a kind of car reversing radar .The distance between car and barrier can be displayed on LED real time ,and at the same time ,the sound ang light alarming can be given at appointed distance. The syetem consist of two parts: hardware system and software system. In the hardware system , ultrasonic sound generating circuit drives emitting probe to send out ultrasonic signal and the receiving probe receives ultrasonic signal that is reflected from barrier . The received electrical signl is conditioned by the receiving circuit and put into SCM system after conditioning , where the signal is processed , then displayed , and the sound and light alarming will be given at the appointed distance. Assemble language is used in the software system and modularization design idea is adopted. This system realizes all desired functions and coincides with demand after system debugging.Keywords: Reversing radar Ultrasonic sensor Single Chip Micyoco LED display目录第一章绪言 (1)第二章总体方案 (2)第一节模块构建 (2)第二节超声波测距的原理 (2)第三节超声波传感器 (3)第三章系统硬件设计 (6)第一节系统总体方案设计 (6)第二节AT89C51单片机简介 (6)第三节电源电路 (9)第四节控制电路 (10)第五节超声波发射和接收电路 (11)第六节LED显示电路 (15)第七节报警电路 (16)第四章系统软件设计 (18)第一节软件设计要求 (18)第二节超声波测距仪的算法设计 (18)第三节主程序 (18)第四节超声波发送、接收中断程序 (19)第五节显示程序、报警程序 (20)结论 (22)致谢 (23)参考文献 (1)第一章绪言随着社会的进步和生活的需求,越来越多的家庭拥有了汽车。
基于超声波检测的倒车雷达的设计
基于超声波检测的倒车雷达的设计院系自动化学院专业测控技术与仪器班级5407102学号200504071055姓名吕坤指导教师刘利秋负责教师刘利秋沈阳航空工业学院2009年6月摘要本论文阐述的是基于超声波检测的倒车雷达的设计。
本课题利用超声波检测、单片机系统设计出一种汽车倒车雷达,并能将汽车与障碍物的距离用LED实时显示,同时对特定的距离进行声光报警。
本系统由两部分组成,硬件系统和软件系统。
硬件系统利用超声波发生电路驱动超声波发射探头发射超声波信号,再由超声波接收探头接收经障碍物反射回的超声波信号,并通过接收电路对信号进行调理,再将调理后的信号传入单片机系统,然后单片机系统将信号经过处理送显示,并且在规定的距离进行声光报警。
软件系统用汇编语言进行编程,采用模块化设计思想。
该系统通过联调后,实现了预期各种功能,符合设计要求。
关键词:倒车雷达;超声波传感器;单片机;LED显示AbstractThis paper introduces the design of car reversing radar based on the ultrasonic testing . The task uses ultrasonic testing and Single Chip Micyoco(SCM) syetem to design a kind of car reversing radar.The distance between car and barrier can be displayed on LED real time,and at the same time,the sound ang light alarmingcan be given at appointed distance. The syetem consist of two parts: hardware system and software system. In the hardware system,ultrasonic sound generating circuit drives emitting probe to send out ultrasonic signal and the receiving probe receives ultrasonic signal that is reflected from barrier.The received electrical signl is conditioned by the receiving circuit and put into SCM system after conditioning,where the signal is processed,then displayed,and the sound and light alarming will be given at the appointed distance. Assemble language is used in the software system and modularization design idea is adopted.This system realizes all desired functions and coincides with demand after system debugging. Keywords: Reversing radar; Ultrasonic sensor; Single Chip Micyoco ; LED display目录第1章绪论 (1)1.1课题产生的背景 (1)1.2本课题的主要任务及内容 (1)1.3本课题的任务分析与实现 (2)1.4本论文的主要内容安排 (3)第2章超声波测距的基本原理 (4)2.1超声波简介 (4)2.2 超声波测距原理 (4)第3章倒车雷达的硬件系统设计 (6)3.1超声波发射电路设计 (6)3.2超声波接收电路设计 (7)3.3单片机系统电路 (9)3.3.1单片机的选择 (9)3.3.2单片机外围电路的设计 (11)3.3.3显示电路的设计 (13)3.3.4 报警电路的设计 (14)第4章倒车雷达的软件系统设计 (15)4.1倒车雷达的软件设计方案 (15)4.2主程序设计 (16)4.3时差测量子程序 (17)4.4显示子程序 (17)4.5报警子程序 (18)第5章系统调试与分析 (20)5.1调试分析的一般过程 (20)5.2硬件调试 (20)5.3软件调试 (21)5.4汽车倒车雷达的系统调试 (21)5.5调试故障及原因分析 (22)5.6测试结果分析 (22)结论 (24)社会经济效益分析 (25)参考文献 (26)致谢 (27)附录Ⅰ汽车倒车雷达硬件系统原理图 (28)附录Ⅱ汽车倒车雷达软件程序清单 (29)附录Ⅲ汽车倒车雷达元器件清单 (43)第1章绪论1.1课题产生的背景随着经济的发展与汽车科学技术的进步,公路交通呈现出行驶高速化、车流密集化和驾驶员非职业化的趋势。
基于超声波的汽车倒车防撞报警系统硬件设计【开题报告】

毕业设计开题报告测控技术与仪器基于超声波的汽车倒车防撞报警系统硬件设计1选题的背景、意义随着我国汽车产业的发展和人民生活水平的不断提高,越来越多的家庭拥有自己的汽车,在享受汽车给我带来便利的同时,一方面汽车的数量逐年增加,公路,街道,停车场和车库拥挤不堪,可转动的空间越来越少,另一方面,新司机非专职司机越来越多,由于倒车而产生的问题也日益突出,倒车引起的纠纷也越来越多。
倒车时,车辆之间,车辆与人之间,车辆与墙壁等障碍物之间的碰撞时有发生,在2002年的车辆事故发生的比例中,倒车引起的事故占21%,到2006年,倒车引起的事故比例占28%,到2008年甚至达到了30%。
倒车已成为一项令人头痛的任务,即使是经验丰富的老司机也在抱怨倒车是一件费力费神的事。
汽车倒车时,由于驾驶员看不见后面的物体和人,往往会引发事故。
由于在视觉盲区,无法看清楚身后的障碍物,司机倒车时很容易刮伤汽车,甚至发生事故,当倒车进入停车场指定泊位时,如果撞到石块或桩基,常常会将车后的消音器,后车灯和后车箱撞坏。
倒车是一个复杂的任务。
他依赖于驾驶员的驾驶经验,驾驶技巧以及反应灵敏程度。
任一环节出现错误都会导致驾驶员无法快速准确的完成倒车任务。
改善倒车遇到的窘境被越来越多的人所关注,人们对汽车操纵的便捷性能提出了更高的要求,希望有种装置能够解决汽车倒车给人们带来的不便,消除驾驶中的不安全因素,解决汽车倒车中存在的困难。
解决汽车的倒车难题目前有两种思路,一是寄希望于汽车自动驾驶技术及其配套设施的日益成熟,目前这项技术仍处于研制开发阶段,短期内尚未能开发应用,第二,据统计,危险境况时,如果能给驾驶员半秒钟的预处理时间,则可减少倒车事故的30%。
所以用简单的汽车倒车预警系统,亦能很大程度地解决倒车难题,但是传统的汽车倒车预警系统的功能简单,驾驶员仍然需要通过后视镜去判断车后的物体,以及通过估计汽车和车后障碍物的距离来完成倒车任务。
为了减少因此带来的损失,需要有一种专门的辅助装置帮助司机可以安全的完成倒车任务。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
万方数据
万方数据
万方数据
万方数据
基于超声波倒车雷达防撞系统设计
作者:沈二波, 陈彬, SHEN Er-bo, CHEN Bin
作者单位:沈二波,SHEN Er-bo(开封大学国际教育学院,开封,475004), 陈彬,CHEN Bin(湖南省电子研究所,长沙,410001)
刊名:
电脑与信息技术
英文刊名:COMPUTER AND INFORMATION TECHNOLOGY
年,卷(期):2011,19(2)
被引用次数:1次
1.林勇汽车倒车防撞雷达系统原理及优化的探讨[期刊论文]-计算机工程应用技术 2008(04)
2.潘福全;符传聪;魏慧娟基于超声波的汽车倒车防擅系统设计[期刊论文]-机械工程与自动化 2010(2)
3.魏海明;杨兴瑶实用电子电路500例 1996
4.沈二波;王爱民;杨红卫基于DS18820的远程粮仓温控系统[期刊论文]-微计算机信息 2008(10-1)
1.李小松.田文强.LI Xiao-song.TIAN Wen-qiang倒车防撞报警系统的设计[期刊论文]-太原科技大学学报2011,32(3)
2.周超.ZHOU Chao具有声光提示双功能的倒车防撞系统设计[期刊论文]-传感器与微系统2011,30(5)
3.闫新星.李铁鹰.刘鹏鹏.YAN Xin-xing.LI Tie-ying.LIU Peng-peng基于AT89S51的汽车防撞报警系统设计与开发[期刊论文]-电脑知识与技术2011,07(2)
4.孙会楠基于单片机的倒车雷达研究[期刊论文]-科技创新导报2011(15)
5.张敏.寇为刚.ZHANG Min.KOU Wei-gang基于超声波的自动测距系统设计[期刊论文]-自动化技术与应用
2011,30(4)
6.陈学永具有语音提示和数码距离显示的超声波倒车雷达设计[会议论文]-2007
7.张莹.张进.刘天飞.ZHANG Ying.ZHANG Jin.LIU Tian-fei超声波倒车防撞系统[期刊论文]-通信技术
2011,44(2)
8.陈双全.CHEN Shuangquan基于AT89S51单片机倒车雷达的研制[期刊论文]-电脑编程技巧与维护2010(14)
9.董敏学汽车倒车碰撞防止系统设计[期刊论文]-上海汽车2001(11)
1.兰羽具有温度补偿功能的超声波测距系统设计[期刊论文]-电子测量技术 2013(2)
引用本文格式:沈二波.陈彬.SHEN Er-bo.CHEN Bin基于超声波倒车雷达防撞系统设计[期刊论文]-电脑与信息技术 2011(2)。