SPWM波控制单相逆变器双闭环PID调节器的Simulink建模与仿真
SPWM于单相全桥及其三相电压型桥式逆变电路的simulink仿真应用

SPWM于单相全桥及其三相电压型桥式逆变电路的应用11级电牵3班xx 关键字:单相桥三相桥全控逆变SPWM simulink本次实验主要为利用simulink中的块原件来构建电力电子中的一种基本整流电路——单相全桥逆变电路和三相电压型桥式逆变电路,单相电路的功能是将直流电逆变为交流电,而三相逆变电路则是在单相的基础上变为三相,功能更加完善。
在逆变电路的设计过程中,需要对设计电路及有关参数选择是否合理、效果好坏进行验证。
如果通过实验来验证,需要经过反复多次的元件安装、调试、重新设计等步骤,这样使得设计耗资大,效率低,周期长。
现代计算机仿真技术为电力电子电路的设计和分析提供了崭新的方法,可以使复杂的电力电子电路、系统的分析和设计变得更加容易和有效。
Matlab 是一种计算机仿真软件,它是以矩阵为基础的交互式程序计算语言。
Simulink 是基于框图的仿真平台,它挂接在Matlab 环境上,以Matlab 的强大计算功能为基础,用直观的模块框图进行仿真和计算。
其中的电力系统(Power System)工具箱是专用于RLC电路、电力电子电路、电机传动控制系统和电力系统仿真用的模型库。
以Matlab7.0 为设计平台,利用Simulink 中的Power System工具箱来搭建整流电路仿真模型,设置参数进行仿真。
一、电路工作原理1.SPWM电路工作原理同步调制——N等于常数,并在变频时使载波和信号波保持同步。
f变化时N不变,信号波一周期内输出脉冲数固定。
三基本同步调制方式,r相,公用一个三角波载波,且取N为3的整数倍,使三相输出对称。
为使一相的PWM波正负半周镜对称,N应取奇数。
当N=9时的同步调制三相PWM波形如上图所示。
2.逆变电路工作原理1)IGBT单相电压型全桥无源逆变电路原理分析单相逆变电路主要采用桥式接法。
它的电路结构主要由四个桥臂组成,其中每个桥臂都有一个全控器件IGBT和一个反向并接的续流二极管,在直流侧并联有大电容而负载接在桥臂之间。
一种基于SPWM的逆变电源并联运行参数设计及控制策略仿真
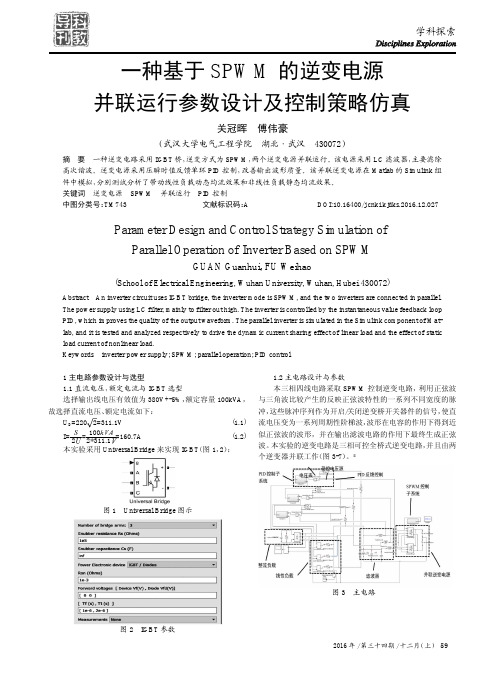
592016年/第三十四期/十二月(上)一种基于SPWM 的逆变电源并联运行参数设计及控制策略仿真关冠晖傅伟豪(武汉大学电气工程学院湖北・武汉430072)摘要一种逆变电路采用IGBT 桥,逆变方式为SPWM ,两个逆变电源并联运行。
该电源采用LC 滤波器,主要滤除高次谐波。
逆变电源采用压瞬时值反馈单环PID 控制,改善输出波形质量。
该并联逆变电源在Matlab 的Simulink 组件中模拟,分别测试分析了带动线性负载动态均流效果和非线性负载静态均流效果。
关键词逆变电源SPWM并联运行PID 控制中图分类号:TM743文献标识码:ADOI:10.16400/ki.kjdks.2016.12.027Parameter Design and Control Strategy Simulation ofParallel Operation of Inverter Based on SPWMGUAN Guanhui,FU Weihao(School of Electrical Engineering,Wuhan University,Wuhan,Hubei 430072)Abstract An inverter circuit uses IGBT bridge,the inverter mode is SPWM,and the two inverters are connected in parallel.The power supply using LC filter,mainly to filter out high.The inverter is controlled by the instantaneous value feedback loop PID,which improves the quality of the output waveform.The parallel inverter is simulated in the Simulink component of Mat-lab,and it is tested and analyzed respectively to drive the dynamic current sharing effect of linear load and the effect of static load current of nonlinear load.Keywordsinverter power supply;SPWM;parallel operation;PID control1主电路参数设计与选型1.1直流电压,额定电流与IGBT 选型选择输出线电压有效值为380V+-5%,额定容量100kV A ,故选择直流电压、额定电流如下:U D =2202=311.1V(1.1)I==100=160.7A (1.2)本实验采用Universal Bridge 来实现IGBT (图1,2):图1Universal Bridge图示图2IGBT 参数1.2主电路设计与参数本三相四线电路采取SPWM 控制逆变电路,利用正弦波与三角波比较产生的反映正弦波特性的一系列不同宽度的脉冲,这些脉冲序列作为开启/关闭逆变桥开关器件的信号,使直流电压变为一系列周期性阶梯波,波形在电容的作用下得到近似正弦波的波形,并在输出滤波电路的作用下最终生成正弦波。
基于SPWM控制的电压_电流双环逆变器建模及其仿真_图文(精)

第4卷中国舰船研究第4卷第5期2009年10月中国舰船研究Chinese Journal of Ship Research Vol .4No.5Oct.2009收稿日期:2008-09-03作者简介:朱承邦(1963-,男,高级工程师。
研究方向:雷达应用1引言现代科技发展日新月异,各类电气设备对电源的品质要求也越来越高。
逆变供电作为一种有效的电力供应形式,已广泛应用于生产生活的各个领域。
为了不断改善逆变器输出性能,人们发展出了多种逆变器控制方法,常见的有:电压瞬时值控制、电流滞环控制、电流预测控制、鲁棒控制[1]、重复控制[2,3]、滑模控制[4]及SPWM 电流控制等。
就各种逆变器控制策略的特点来看,基于SPWM 的电压电流双环逆变器控制是一种较好的控制方法[5,6]。
本文针对电压电流双环逆变器控制模型,设计了电流内环和电压外环的控制参数,对设计的双环控制逆变器模型进行了仿真分析,分析结果基于SPWM 控制的电压、电流双环逆变器建模及其仿真朱承邦1李乐2王晓鹏21大连船舶重工集团有限公司军事代表室,辽宁大连1160052中国舰船研究设计中心,湖北武汉430064摘要:基于SPWM 的电压电流双环逆变器控制相对其他逆变器控制策略具有一定优越性,但其控制器参数设计却是一个重点和难点。
针对逆变器的SPWM 电压电流双环控制策略,建立了系统的控制模型,设计了电流内环和电压外环的控制器参数,并根据经典控制理论的判据,分别对控制器电流内环和电压外环参数进行了理论验证。
最后根据设计的控制器参数,对SPWM 电压电流双环控制系统模型进行了仿真分析,结果表明,系统设计合理,效果满意。
关键词:SPWM ;逆变器;电压电流双环;仿真中图分类号:TM743文献标志码:A文章编号:1673-3185(200905-54-05Modeling and Si mulation of Voltage and Current Double Loop Control Based on SPWM InvertersZhu Cheng-bang 1Li Le 2Wang Xiao -p eng 21The Naval Representative Office ,Dalian Shipbuilding Heavy Industry Co.,Dalian 116005,China2China Ship Development and Design Cent er ,Wuhan 430064,ChinaAbstract :Comparing with other inverters control strategy ,voltage and current double loop control based on SPWM inverters are superior in capabilities though the controller parameters design is significant and difficult.In this paper ,the system controlmodel has been constructed in term s of inverters of SPWM voltage and current double loop control strategy ,and the current inner loop and voltage outer loop controller parameters design has been proposed with theoretical validation of classic control theory criterion.T he SPWM voltage and current double loop control system model simulation provided with designed controller parameters show s that the system design is reasonable and the effect is satisfying.Key words :SPWM ;inverter ;voltage and current double loop ;simulation第5期证明了系统参数设计的合理性。
Simulink的SPWM逆变电源的建模与仿真-论文
s h o u l d n o t o n l y r a i s e t h e mo d u l a t i o n r a t i o,b u t a l s o i n c r e a s e t h e c a r r i e r f r e q u e n c y a n d a c c u r a t e l y a c h i e v e t h e s e l e c t e d c a r i t e r
正 弦波峰值 , 为三角波峰值 。 当载波频率远高于输 出电压基波频率且调制深度 尺≤1时 , 可
E l e c t r i c a l Au t o ma t i o n 5
以及调制模 型的构建提供依据 … , 对 改善 逆变电源性能具有重要
意义 。
件通 断 的 信 号 的
获取方 法一 般有 :
等面积 采样 法 , 规 则采样 法 , 自然 采 样法。 自然 采 样
法是 按 照 S P WM f )
^ ^ ^ ^ ^ ^一 l V y l V U f 疽
0 引 言
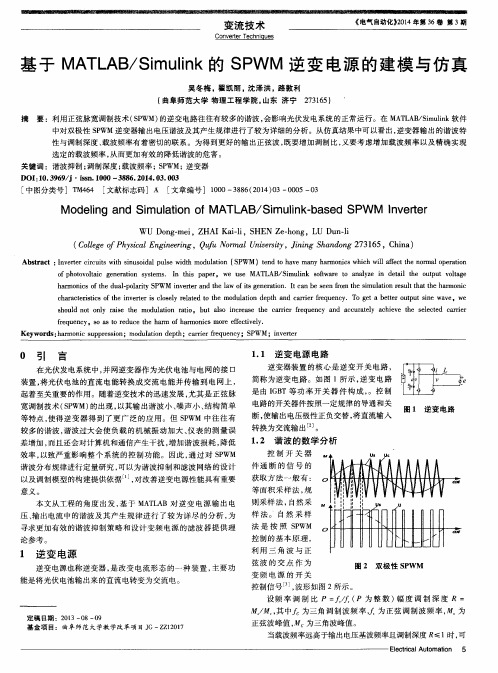
在 光伏发 电系统 中, 并网逆变器作为光伏 电池 与电 网的接 口 装置 , 将光伏 电池的直 流 电能转换成 交流 电能并 传输 到 电网上 ,
起着至关重 要的作用 。随着逆变技术 的迅速发展 , 尤其 是正 弦脉 宽调制技术 ( S P WM) 的出现 , 以其输 出谐波小 、 噪声 小 、 结构简单
j
本文从工程 的角度 出发 , 基 于 MA T L A B对 逆变 电源输 出 电 压、 输 出电流 中的谐波及 其产生 规律进 行 了较为详 尽 的分析 , 为 寻求更加有效 的谐 波抑制 策略 和设 计变频 电源 的滤 波器提 供理 论参考 。
SPWM变频调速系统基于Simulink仿真模拟

SPWM变频调速系统基于Simulink仿真模拟发表时间:2018-03-16T10:18:25.530Z 来源:《知识-力量》2017年11月下作者:刘佳佳,方保江[导读] Simulink中有一个专门为电力系统仿真用的SimPowerSystems工具箱,该工具箱里面几乎包含所有的电力电子元件的模型,可以通过这些模型进行复杂系统的建模。
刘佳佳,方保江(郑州大学机械工程学院,河南郑州450001)摘要:交流伺服驱动系统是一个中间的过渡环节,即从机床的数控装置部分过渡到数控机床的机械传动部分,所以这一环节在数控机床里面是不可或缺的重要环节。
在这种交流伺服驱动系统里面调速系统是主要的核心,在分析各种异步电动机的调速系统以后,发现实现的性能最好和效率最高的就是变压变频调速系统(VVVF)。
在调速系统里面的脉宽调制(PWM)技术发展的飞快,在脉宽调制里面正弦波脉宽调制(SPWM)的特点是原理结构非常简单,控制容易和通用性好等一系列优点。
Simulink是MATLAB的重要组件,它向用户提供了一个动态系统建模,仿真和综合分析的集成环境。
Simulink中有一个专门为电力系统仿真用的SimPowerSystems工具箱,该工具箱里面几乎包含所有的电力电子元件的模型,可以通过这些模型进行复杂系统的建模。
关键词:交流伺服驱动系统;电力电子技术;VVVF;PSWM ;MATLAB/Simulink1 引言在进行交流电动机调速时,根据转速的表达式n=60f(1-s)/p,(其中n表示转速,f表示电流频率,s表示转差率,p表示磁极对数)。
要实现速度的变化,首先可以改变的是磁极对数,但由表达式可知,这种方式改变电动机的转动速度是有限的,而且不能实现无极变速。
另一种方法就是改变输入的电流的频率,改变输入的频率可以连续的改变电动机的转动速度,可以实现无极的变速,这一种方法就是变频调速。
在三相异步电动机里面电压与磁通之间的关系式就是U=kfΦ,其中U指异步电动机定子绕组的输入电压,f指电流的频率,Φ指磁通。
SPWM波控制逆变器双闭环PID调节器的建模与仿真
SPWM波控制逆变器双闭环PID调节器的建模与仿真随着电力行业的快速发展,逆变器的应用越来越广泛,逆变器的好坏会直接影响整个系统的逆变性能和带载能力。
逆变器的控制目标是提高逆变器输出电压的稳态和动态性能,稳态性能主要是指输出电压的稳态精度和提高带不平衡负载的能力;动态性能主要是指输出电压的THD(Total Hannonic Distortion) 和负载突变时的动态响应水平。
在这些指标中对输出电压的THD 要求比较高,对于三相逆变器,一般要求阻性负载满载时THD 小于2%,非线性满载(整流性负载)的THD 小于5%.这些指标与逆变器的控制策略息息相关。
文中主要介绍如何建立电压双环SPWM 逆变器的数学模型,并采用电压有效值外环和电压瞬时值内环进行控制。
针对UPS 单模块10 kVA 单相电压型SPWM 逆变器进行建模仿真。
通过仿真,验证了控制思路的正确性以及存该控制策略下的逆变器所具有的鲁棒性强,动态响应快,THD 低等优点。
并以仿真为先导,将其思想移植到具体开发中,达到预期效果。
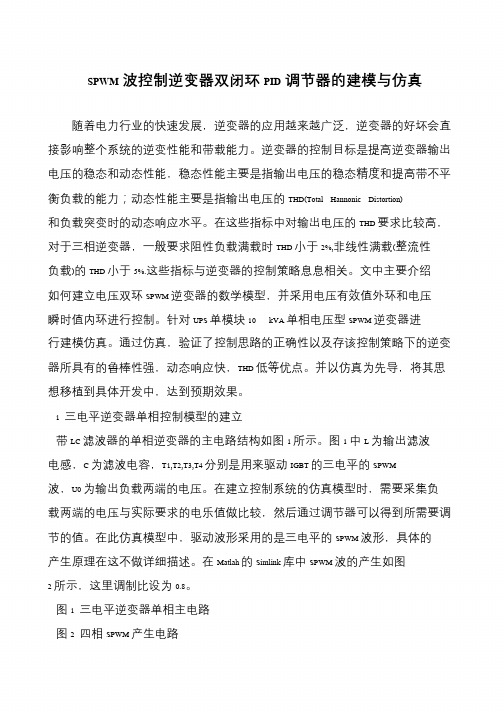
1 三电平逆变器单相控制模型的建立带LC 滤波器的单相逆变器的主电路结构如图1 所示。
图1 中L 为输出滤波电感,C 为滤波电容,T1,T2,T3,T4 分别是用来驱动IGBT 的三电平的SPWM 波,U0 为输出负载两端的电压。
在建立控制系统的仿真模型时,需要采集负载两端的电压与实际要求的电乐值做比较,然后通过调节器可以得到所需要调节的值。
在此仿真模型中,驱动波形采用的是三电平的SPWM 波形,具体的产生原理在这不做详细描述。
在Matlah 的Simlink 库中SPWM 波的产生如图2 所示,这里调制比设为0.8。
图1 三电平逆变器单相主电路图2 四相SPWM 产生电路。
控制的单相电压型PWM逆变器建模与仿真

f(s)
(C)突加突减负载运行
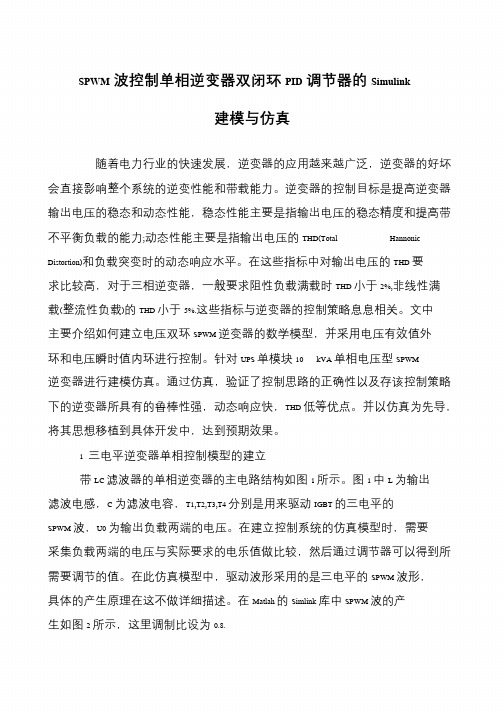
在四种不同运行条件下进行仿真实验: (1)额定负载正常运行; (2)直流电源含有谐波(有效值为50V,频率为 150 Hz)运行; (3)突加突减额定负载运行,逆变器先空载运 行,在0.04 s突加额定负载,到0.14 s时突然甩掉 全部负载; (4)能量回馈运行,负载中含有交流电源(有效 值为400 V,50 Hz),能量向直流侧回馈。 四种运行条件下,负载电流珏和输出电压以 波形分别如图5(a)、(b)、(C)、(d)所示。
在Matlab/SimuIink下构建的逆变器仿真模型 如图4所示。该模型主要有三部分:主电路、控制器 和PWM脉冲生成模块。控制器实现电压电流双环 控制,为产生PWM脉冲提供调制信号。PWM脉冲 生成模块采用单极性倍频调制方式【7。。
万方数据
2009年第l期
杨会敏。宋建成 基于双环控制的单相电压型PWM逆变器建模与仿真
6结论
本文基于状态空间法建立单相逆变器的数学 模型,采用电压电流双环控制,对单相PWM逆变 器进行了建模仿真。仿真结果表明,所采用的控制 策略使逆变器具有输出电压稳态精度高(偏差不超
过±l%)、动态响应快(不超过O.04 s)、输出电压总 谐波畸变率低(总THD值不超过3%)和鲁棒性强 等优点,可以减少对电网的污染,降低因负载突变 引起的电网电压波动等不利因素。 参考文献: [1]陈江辉,谢运祥,陈兵.逆变电路的控制技术与策略[J].
以小错=丽1 人端到逆变器的滤波器输出端电压的传递函数为: (3)
根据各变量之间的内在联系,得到逆变器的等效框 图如图2所示。从图2中可以看出,这是一个双输 人、单输出的二阶线性系统,Mi和厶为系统的输入。 图2中Z(s)为负载阻抗,由于负载阻抗的多样性, 即使负载上的电压为纯正弦波,负载电流也可能是 任意波形。若把负载电流厶处理为控制系统的一个 扰动输人信号,当逆变器带非线性负载时,负载的 非线性也仅表现在扰动的非线性上。这样的负载模 型具有较强的代表性,而且数学模型形式简单不依 赖于具体的负载类型。
SPWM波控制单相逆变器双闭环PID调节器的Simulink建模与仿真
SPWM波控制单相逆变器双闭环PID调节器的Simulink建模与仿真随着电力行业的快速发展,逆变器的应用越来越广泛,逆变器的好坏会直接影响整个系统的逆变性能和带载能力。
逆变器的控制目标是提高逆变器输出电压的稳态和动态性能,稳态性能主要是指输出电压的稳态精度和提高带不平衡负载的能力;动态性能主要是指输出电压的THD(Total Hannonic Distortion)和负载突变时的动态响应水平。
在这些指标中对输出电压的THD 要求比较高,对于三相逆变器,一般要求阻性负载满载时THD 小于2%,非线性满载(整流性负载)的THD 小于5%.这些指标与逆变器的控制策略息息相关。
文中主要介绍如何建立电压双环SPWM 逆变器的数学模型,并采用电压有效值外环和电压瞬时值内环进行控制。
针对UPS 单模块10 kVA 单相电压型SPWM 逆变器进行建模仿真。
通过仿真,验证了控制思路的正确性以及存该控制策略下的逆变器所具有的鲁棒性强,动态响应快,THD 低等优点。
并以仿真为先导,将其思想移植到具体开发中,达到预期效果。
1 三电平逆变器单相控制模型的建立带LC 滤波器的单相逆变器的主电路结构如图1 所示。
图1 中L 为输出滤波电感,C 为滤波电容,T1,T2,T3,T4 分别是用来驱动IGBT 的三电平的SPWM 波,U0 为输出负载两端的电压。
在建立控制系统的仿真模型时,需要采集负载两端的电压与实际要求的电乐值做比较,然后通过调节器可以得到所需要调节的值。
在此仿真模型中,驱动波形采用的是三电平的SPWM 波形,具体的产生原理在这不做详细描述。
在Matlah 的Simlink 库中SPWM 波的产生如图2 所示,这里调制比设为0.8.图1 三电平逆变器单相主电路图2 四相SPWM 产生电路在B1,B2,B3,B4 端口用模拟示波器观察其波形,结果如图3 所示。
图3 四相SPWM 驱动波形2 双环控制的选取在逆变控制系统中,采用输出电压有效值反馈的方法进行控制,这种方法通过将输出电压有效值与实际所要求的电压有效值进行比较,误差信号与正弦信号相乘的结果作为SPWM 的调制信号。
SIMULINK建模仿真PID控制

实验二PID调节器实验内容:SIMULINK建模仿真学生信息:自动化提交日期:2023年5月28日报告内容:PID调节器一、实验目的1.掌握仿真系统参数设置及子系统封装技术;2.分析PID调节器各参数对系统性能的影响。
二、实验设备1.计算机1台2.MATLAB 7.X软件1套。
三、实验原理说明1.建立新的simulink模块编辑界面,画出如图1所示的模块图。
对应的增益参数分别设为P和I,左击选中全部框图,右击菜单选择“creat subsystem”,变为图2。
图1:图2:2.右击图2中间的框图“Subsystem”,在右击的菜单中选择“Mask Subsystem”,出现下图。
先直接输入disp('PI调节器'),给待封装的子系统命名。
3.选择“Parameters”进行参数设置,点击按钮,添加参数,此参数必须与上文设置的参数对应,否则无效,如下图所示。
4.点击OK,完成子系统的封装。
双击PI调节器模块,出现参数设定对话框如下,可以进行参数调节。
四、实验步骤1.从continue模块集中拉出Derivative、Integrator以及从Math Operations模块集中拉出Gain模块,设计PID调节器,对PID调节器进行封装;2.建立Simulink原理图如下:3.双击PID调节器模块,调整调节器的各参数。
五、实验要求分析调节器各参数对系统性能的影响,撰写实验报告:1.P调节将PID调节器的积分增益和微分增益改为0,使其具有比例调节功能,对系统进行纯比例调节。
调整比例增益(P=0.5,2,5),观察响应曲线的变化。
图1 P=0.5时的阶跃信号及其响应图2 P=2时的阶跃信号及其响应图3 P=5时的阶跃信号及其响应P增大,系统在稳定时的静差减少。
2.PD调节调节器的功能改为比例微分调节,调整参数(P=2,D=0.1,0.5,2,5),观测系统的响应曲线。
图4 P=2,D=0.1时的阶跃信号及其响应图5 P=2,D=0.5时的阶跃信号及其响应图6 P=2,D=2时的阶跃信号及其响应图7 P=2,D=5时的阶跃信号及其响应D增大,系统将会快速收敛,同时系统静差会增大。
一种基于SPWM控制的逆变器设计与仿真

方 案 的复杂 程度 。无论 是分 裂 电容式 三桥 臂还 是 四 桥 臂式 的逆 变器 拓 扑结 构 , 都是 通 过 引 出 中线来 调
b lt fi rils se i n r a e iiy o neta y tm si c e s d. Ke r y wo ds: W M ;nv ae ; ATLAB; o b e o p c n r l SP i e rM d u l -l o o to
ቤተ መጻሕፍቲ ባይዱ0 引 言
近 年 来 , 着 生产 生 活 中对 电源 质 量要 求 的不 随
摘
要: 设计一种基 于 S WM控制 的逆 变器 , P 通过增加 B ot os 升压 电路 , 成 了逆 变器母 线 电压 的闭环 控制 , 完 同
时用 S WM 的占空比对逆 变器输出 电压进行 闭环 , P 从而实现双闭环控制 , 增加了逆变器 的功率和对不平 衡负载情 况
的处理 , 并运用 MA L B对控制策略进行仿真 验证 , 明双闭环控制和增加 B ot TA 证 os 的逆变 器设计 能够提 高逆变器 对
De i n a d i u a i n o n I e t r Ba e n PW M nt o sg n S m l to f a nv r e s d o S Co r l
Y N i - e, U A G J g w iL n
,I h n n Z A G Y 币 L eg , H N u S
三线制 , 但是这种逆变器只能给平衡负载供电, 在带
不平 衡 负 载 逆 变 器 中越 来 越 多地 采 用 了三 相 四线 制, 其主 要 区别在 于 三 相 四线 制 系统 通 过 不 同 的方
基于SPWM逆变器控制系统的建模与仿真

21 00年 7月 2 5日第 2 7卷第 4 期
Tee o P we c n lg lc m o rTe h oo y J 1 5,2 1 u.2 0 0,Vo.2 .4 1 7 No
文 章编号 :0 93 6 (0 0 0 —0 40 1 0 —6 4 2 1 )40 0 —4
c r e tfe b c o t o Ss lc e sa b te c e .Fia l t esmu a i n r s l ft es lc e o to c e h w u r n e d a k c n r ¨ ee t d a e t rs h me nl y h i lt e u t o h ee t d c n r l h me s o o s s
(S h o fOp ia e t i l n o u e g n e i g co l t l o c Elc rc d C mp t rEn i e r ,Un v r i f a a n i e st o y
S a g a o ce c n c n l g h n h if rS in e a d Te h oo y,S a g a 0 0 3,Ch n ) h nh i 0 9 2 ia
Ab ta t n d u l l o o to y t m,i r e o o t i e tr c n r l fe t h n e t r mu ta h e e t e sa e s r c :I o b e o p c n r 1 s e - s n o d rt b an b te o to f c ,t e iv re s c iv h t t e f e b c e o p i g n t i p p r a e n sa e f e b c e o p ig,t e S W M t e t a d lwa s a l h d e d a k d c u l .I h s a e ,b s d o t t e d a k d c u l n n h P ma h ma i l c mo e s e t b i e , s a d t e et r p s d c n r l c e sa ec mp r d,b n l zn h o n h n t h wo p o o e o t o h me r o a e s y a a y ig t e c mma d ta s e u c i n o h y a c ta k n r n f r n t ft e d n mi r c — f o
基于SPWM控制的电压_电流双环逆变器建模及其仿真

第4卷中国舰船研究第4卷第5期2009年10月中国舰船研究Chinese Journal of Ship Research Vol .4No.5Oct.2009收稿日期:2008-09-03作者简介:朱承邦(1963-),男,高级工程师。
研究方向:雷达应用1引言现代科技发展日新月异,各类电气设备对电源的品质要求也越来越高。
逆变供电作为一种有效的电力供应形式,已广泛应用于生产生活的各个领域。
为了不断改善逆变器输出性能,人们发展出了多种逆变器控制方法,常见的有:电压瞬时值控制、电流滞环控制、电流预测控制、鲁棒控制[1]、重复控制[2,3]、滑模控制[4]及SPWM 电流控制等。
就各种逆变器控制策略的特点来看,基于SPWM 的电压电流双环逆变器控制是一种较好的控制方法[5,6]。
本文针对电压电流双环逆变器控制模型,设计了电流内环和电压外环的控制参数,对设计的双环控制逆变器模型进行了仿真分析,分析结果基于SPWM 控制的电压、电流双环逆变器建模及其仿真朱承邦1李乐2王晓鹏21大连船舶重工集团有限公司军事代表室,辽宁大连1160052中国舰船研究设计中心,湖北武汉430064摘要:基于SPWM 的电压电流双环逆变器控制相对其他逆变器控制策略具有一定优越性,但其控制器参数设计却是一个重点和难点。
针对逆变器的SPWM 电压电流双环控制策略,建立了系统的控制模型,设计了电流内环和电压外环的控制器参数,并根据经典控制理论的判据,分别对控制器电流内环和电压外环参数进行了理论验证。
最后根据设计的控制器参数,对SPWM 电压电流双环控制系统模型进行了仿真分析,结果表明,系统设计合理,效果满意。
关键词:SPWM ;逆变器;电压电流双环;仿真中图分类号:TM743文献标志码:A文章编号:1673-3185(2009)05-54-05Modeling and Si mulation of Voltage and Current Double Loop Control Based on SPWM InvertersZhu Cheng-bang 1Li Le 2Wang Xiao -p eng 21The Naval Representative Office ,Dalian Shipbuilding Heavy Industry Co.,Dalian 116005,China2China Ship Development and Design Cent er ,Wuhan 430064,ChinaAbstract :Comparing with other inverters control strategy ,voltage and current double loop control based on SPWM inverters are superior in capabilities though the controller parameters design is significant and difficult.In this paper ,the system control model has been constructed in term s of inverters of SPWM voltage and current double loop control strategy ,and the current inner loop and voltage outer loop controller parameters design has been proposed with theoretical validation of classic control theory criterion.T he SPWM voltage and current double loop control system model simulation provided with designed controller parameters show s that the system design is reasonable and the effect is satisfying.Key words :SPWM ;inverter ;voltage and current double loop ;simulation第5期证明了系统参数设计的合理性。
单相正弦波PWM逆变电路仿真报告(Simulink)
单相正弦波PWM逆变电路仿真报告1. 仿真目的:通过对单相SPWM逆变电路不同控制方式的仿真研究,进一步理解SPWM 控制信号的产生原理,单极性、双极性控制方式的原理及不同、载波比与调制深度不同对逆变电路输出波形的影响等。
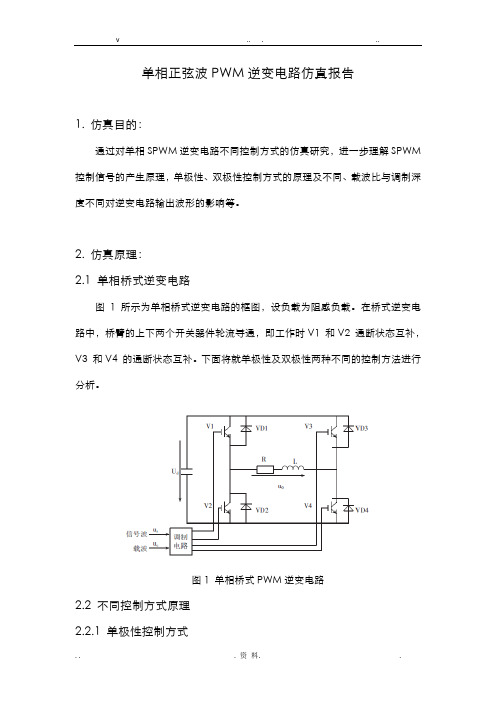
2. 仿真原理:2.1 单相桥式逆变电路图1 所示为单相桥式逆变电路的框图,设负载为阻感负载。
在桥式逆变电路中,桥臂的上下两个开关器件轮流导通,即工作时V1 和V2 通断状态互补,V3 和V4 的通断状态互补。
下面将就单极性及双极性两种不同的控制方法进行分析。
图1 单相桥式PWM逆变电路2.2 不同控制方式原理2.2.1 单极性控制方式调制信号u r为正弦波,载波u c在u r的正半周为正极性的三角波,在u r的负半周为负极性的三角波。
在u r的正半周,V1保持通态,V2保持断态,在u r>u c 时使V4导通,V3关断,u0=U d; 在u r<u c时使V3导通,V4关断,u0=0; 在u r 的负半周,V1保持断态,V2保持通态,在u r<u c时使V3导通,V4关断,u0=-U d; 在u r>u c时使V4导通,V3关断,u0=0。
这样就得到了SPWM波形u0。
图2 单极性PWM控制波形2.2.2 双极性控制方式采用双极性方式时,在u r的半个周期内,三角波不再是单极性的,而是有正有负,所得的PWM波也是有正有负。
在u r的一个周期内,输出的PWM波只有两种电平,而不像单极性控制时还有零电平。
在u r的正负半周,对各开关器件的控制规律相同。
即u r>u c时,给V1和V4导通信号,给V2和V3以关断信号,如i0>0,则V1和V4通,如i0<0,则VD1和VD4通,不管哪种情况都是输出电压u0=U d。
u r<u c时,给V2和V3导通信号,给V1和V4以关断信号,这时如i0<0,则V2和V3通,如i0>0,则VD2和VD3通,不管哪种情况都是输出电压u0=-U d。
单相单,双极性SPWM仿真课设
通过对单极性与双极性SPWM结果的比较可以看出单极性的输出电流的波动幅值更小,谐波频率高,畸变率THD小,更接近正弦波。
对各输出电压uo的频谱分析可看出PWM波不含有低次谐波,只含有高次谐波,其中800~1000HZ的谐波含量较多。
图3-8a为f=50,N=18,Ma=0.9时的波形结果图(uo为输出电压io为输出电流)
图3-8a
图3-8b为f=50,N=18,Ma=0.9时输出电压uo的频谱图
图3-8b
图3-8c为f=50,N=18,Ma=0.9时输出电流io的频谱图
图3-8c
图3-9a为f=50,N=24,Ma=0.9时的波形结果图(uo为输出电压io为输出电流)
当ur>uc时,给VT1和VT4导通信号,给VT2和VT3关断信号,如io>0,VT1和VT4通,如io<0,VD1和VD4通,uo=Ud
当ur<uc时,给VT2和VT3导通信号,给VT1和VT4关断信号,如io<0,VT2和VT3通,如io>0,VD2和VD3通,uo=-Ud PWM波等效为正弦波
2.
2
如图2-1是单相PWM逆变电路VT1~VT4是四个IGBT管,VD1~ VD4是四个二极管,调制电路作为控制电路控制IGBT导通与关断来得到所需要的波形
图2-1单相SPWM逆变电路
2
2.2.1
SPWM逆变电路主要有两种控制方法:计算法和调制法。计算法是将PWM脉冲宽度的波形计算出来,显然这种方法是很繁琐的,不采用。调制法是用一个三角波作为载波,将一正弦波作为调制信号进行调制。我们采用调制法。因为等腰三角波上下宽度与高度呈线性关系且左右对称,当它与一个平缓变化的正弦调制信号波相交时,在交点时刻就可以得到宽度正比于正弦信号波幅度的脉冲
实验单相逆变器单极性和双极性SPWM调制技术的仿真

单相逆变器单极性和双极性SPWM 调制技术的仿真1.PWM 控制的基本原理PWM (Pulse Width Modulation )控制就是对脉冲的宽度进行调制的技术,即通过对一系列脉冲的宽度进行调制,来等效地获得所需要的波形。
PWM 控制技术的重要理论基础是面积等效原理,即:冲量相等而形状不同的窄脉冲加在具有惯性的环节上时,其效果基本相同。
下面分析如何用一系列等幅不等宽的脉冲来代替一个正弦半波。
把正弦半波分成N 等分,就可以把正弦半波看成由N 个彼此相连的脉冲序列所组成的波形。
如果把这些脉冲序列用相同数量的等幅不等宽的矩形脉冲代替,使矩形脉冲的中点和相应正弦波部分的中点重合,且使矩形脉冲和相应的正弦波部分面积(冲量)相等,就可得到图1所示的脉冲序列,这就是PWM 波形。
像这种脉冲的宽度按正弦规律变化而和正弦波等效的PWM 波形,也称为SPWM 波。
图1 单极性SPWM 控制方式波形上图所示的波形称为单极性SPWM 波形,根据面积等效原理,正弦波还可等效为图2中所示的PWM 波,这种波形称为双极性SPWM 波形,而且这种方式在实际应用中更为广泛。
图2 双极性SPWM 控制方式波形2.PWM 逆变电路及其控制方法PWM 逆变电路可分为电压型和电流型两种,目前实际应用的几乎都是电压型电路,因此本节主要分析电压型逆变电路的控制方法。
要得到需要的PWM 波U d -U Oω t Ud - U d形有两种方法,分别是计算法和调制法。
根据正弦波频率、幅值和半周期脉冲数,准确计算PWM 波各脉冲宽度和间隔,据此控制逆变电路开关器件的通断,就可得到所需PWM 波形,这种方法称为计算法。
由于计算法较繁琐,当输出正弦波的频率、幅值或相位变化时,结果都要变化。
与计算法相对应的是调制法,即把希望调制的波形作为调制信号,把接受调制的信号作为载波,通过信号波的调制得到所期望的PWM 波形。
通常采用等腰三角波作为载波,在调制信号波为正弦波时,所得到的就是SPWM 波形。
经典的SVPWM理论及Simulink仿真搭建

1 SVPWM 技术原理1.1 SVPWM 调制技术原理空间矢量脉宽调制SVPWM(Space Vector Pulse Width Modulation),实际上是对应于交流感应电机或永磁同步电机中的三相电压源逆变器功率器件的一种特殊的开关触发顺序和脉宽大小的组合,这种开关触发顺序和组合将在定子线圈中产生三相互差120°电角度、失真较小的正弦波电流波形。
实践和理论证明,与直接的正弦脉宽调制(SPWM)技术相比,SVPWM 的优点主要有:(1) SVPWM 优化谐波程度比较高,消除谐波效果要比SPWM 好,实现容易,并且可以提高电压利用率。
(2) SVPWM 比较适合于数字化控制系统。
目前以微控器为核心的数字化控制系统是发展趋势,所以逆变器中采用SVPWM 应是优先的选择。
对称电压三相正弦相电压的瞬时值可以表示为:a mb mc m cos 2cos()32cos()3u U t u U t u U t ωωπωπ⎧⎪=⎪⎪=-⎨⎪⎪=+⎪⎩(2-23) 其中U m 为相电压的幅值,ω=2πf 为相电压的角频率。
图2.11为三相电压的向量图,在该平面上形成一个复平面,复平面的实轴与A 相电压向量重合,虚轴超前实轴90,分别标识为Re 、Im 。
在这个复平面上,定义三相相电压u a 、u b 、u c 合成的电压空间矢量out U 为:22j j j()332outa b c m 2()3t U u u e u e U e πππω--=++= (2-24)图2.11 电压空间矢量三相电压型逆变器电路原理图如图2.12所示。
定义开关量a ,b ,c 和a ',b ',c '表示6个功率开关管的开关状态。
当a ,b 或c 为1时,逆变桥的上桥臂开关管开通,其下桥臂开关管关断(即a ',b '或c '为0);反之,当a ,b 或c 为0时,上桥臂开关管关断而下桥臂开关管开通(即a ',b '或c '为1)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
SPWM波控制单相逆变器双闭环PID调节器的Simulink
建模与仿真
随着电力行业的快速发展,逆变器的应用越来越广泛,逆变器的好坏
会直接影响整个系统的逆变性能和带载能力。
逆变器的控制目标是提高逆变器
输出电压的稳态和动态性能,稳态性能主要是指输出电压的稳态精度和提高带
不平衡负载的能力;动态性能主要是指输出电压的THD(Total Hannonic Distortion)和负载突变时的动态响应水平。
在这些指标中对输出电压的THD 要
求比较高,对于三相逆变器,一般要求阻性负载满载时THD 小于2%,非线性满载(整流性负载)的THD 小于5%.这些指标与逆变器的控制策略息息相关。
文中主要介绍如何建立电压双环SPWM 逆变器的数学模型,并采用电压有效值外
环和电压瞬时值内环进行控制。
针对UPS 单模块10 kVA 单相电压型SPWM 逆变器进行建模仿真。
通过仿真,验证了控制思路的正确性以及存该控制策略
下的逆变器所具有的鲁棒性强,动态响应快,THD 低等优点。
并以仿真为先导,将其思想移植到具体开发中,达到预期效果。
1 三电平逆变器单相控制模型的建立
带LC 滤波器的单相逆变器的主电路结构如图1 所示。
图1 中L 为输出
滤波电感,C 为滤波电容,T1,T2,T3,T4 分别是用来驱动IGBT 的三电平的SPWM 波,U0 为输出负载两端的电压。
在建立控制系统的仿真模型时,需要
采集负载两端的电压与实际要求的电乐值做比较,然后通过调节器可以得到所
需要调节的值。
在此仿真模型中,驱动波形采用的是三电平的SPWM 波形,
具体的产生原理在这不做详细描述。
在Matlah 的Simlink 库中SPWM 波的产
生如图2 所示,这里调制比设为0.8.。