机械原理与机械设计-上册-范元勋-课后答案
机械原理课后习题答案

机械原理课后习题答案1. 两个质量分别为m1和m2的物体,它们分别靠在光滑水平面上的两个弹簧上,两个弹簧的弹性系数分别为k1和k2。
求当两个物体分别受到的外力分别为F1和F2时,两个物体的加速度分别是多少?答,根据牛顿第二定律,物体受到的合外力等于物体的质量乘以加速度,即F=ma。
根据这个公式,可以得出两个物体的加速度分别为a1=F1/m1,a2=F2/m2。
2. 一个质量为m的物体,靠在光滑水平面上的弹簧上,弹簧的弹性系数为k。
求当物体受到外力F时,物体的加速度是多少?答,同样根据牛顿第二定律,物体受到的合外力等于物体的质量乘以加速度,即F=ma。
根据这个公式,可以得出物体的加速度为a=F/m。
3. 一个质量为m的物体,靠在光滑水平面上的弹簧上,弹簧的弹性系数为k。
求当物体受到外力F时,弹簧的位移是多少?答,根据胡克定律,弹簧的位移与受到的外力成正比,即F=kx,其中x为弹簧的位移。
解出x=F/k,即弹簧的位移与外力成反比。
4. 一个质量为m的物体,靠在光滑水平面上的弹簧上,弹簧的弹性系数为k。
求当物体受到外力F时,弹簧的振动周期是多少?答,根据弹簧的振动周期公式T=2π√(m/k),可以得出弹簧的振动周期与物体的质量和弹簧的弹性系数有关,与受到的外力无关。
5. 一个质量为m的物体,靠在光滑水平面上的弹簧上,弹簧的弹性系数为k。
求当物体受到外力F时,弹簧的振幅是多少?答,根据弹簧振动的公式x=Acos(ωt+φ),可以得出弹簧的振幅与受到的外力无关,只与弹簧的弹性系数和物体的质量有关。
求当物体受到外力F时,弹簧的振动频率是多少?答,根据弹簧振动的公式f=1/2π√(k/m),可以得出弹簧的振动频率与受到的外力无关,只与弹簧的弹性系数和物体的质量有关。
7. 一个半径为r的圆盘,靠在光滑水平面上的弹簧上,弹簧的弹性系数为k。
求当圆盘受到外力F时,圆盘的加速度是多少?答,根据牛顿第二定律,物体受到的合外力等于物体的质量乘以加速度,即F=ma。
机械原理课后习题答案

第四章课后习题4—12图示为一曲柄滑块机构的三个位置,F为作用在活塞上的力转动副A及B上所画的小圆为摩擦圆,试决定在此三个位置时作用在连杆AB上的作用力的真实方向(构件重量及惯性力略去不计)。
解:上图中构件2受压力。
因在转动副A处2、1之间的夹角∠OAB在逐渐减小,故相对角速度ω21沿顺时针方向,又因2受压力,故FR12应切于摩擦圆的下方;在转动副B处,2、3之间的夹角∠OBA在逐渐增大,相对角速度ω23也沿顺时针方向,故FR32应切于摩擦圆的上方。
R32解:上图构件2依然受压力。
因在转动副A处2、1之间的夹角∠OAB逐渐减小,故相对角速度ω21沿顺时针方向,又因2受压力,故F R12应切于摩擦圆的下方;在转动副B处,2、3之间的夹角∠OBA逐渐减小,故相对角速度ω23沿逆时针方向,F R32应切于摩擦圆的下方。
解:上图构件2受拉力。
因在转动副A处2、1之间的夹角∠OAB在逐渐增大,故相对角速度ω21沿顺时针方向,又因2受拉力,故FR12应切于摩擦圆的上方;在转动副B处,2、3之间的夹角∠OBA逐渐减小,故相对角速度ω23沿顺时针方向,FR32应切于摩擦圆的下方。
4-13 图示为一摆动推杆盘形凸轮机构,凸轮1沿逆时针方向回转,F为作用在推杆2上的外载荷,试确定凸轮1及机架3作用给推杆2的总反力FR12及FR32方位(不考虑构件的重量及惯性力,解:经受力分析,FR12的方向如上图所示。
在FR12的作用下,2相对于3顺时针转动,故FR32应切于摩擦圆的左侧。
补充题1 如图所示,楔块机构中,已知γ=β=60°,Q =1000N 格接触面摩擦系数f =0.15,如Q 为有效阻力,试求所需的驱动力F 。
解:对机构进行受力分析,并作出力三角形如图。
对楔块1,R 21R310F F F ++=由正弦定理有21sin(602sin(90R F F ϕϕ+-=))o o ① 对楔块2,同理有R12R320Q F F ++=sin(90sin(602ϕϕ+-=))o o ②sin(602sin(602F Q ϕϕ+=⋅-))o o且有2112R R F F = ,8.53arctgf ϕ==o ③联立以上三式,求解得F =1430.65N2 如图示斜面机构,已知:f (滑块1、2与导槽3相互之间摩擦系数)、λ(滑块1的倾斜角)、Q (工作阻力,沿水平方向),设不计两滑块质量,试确定该机构等速运动时所需的铅重方向的驱动力F 。
机械原理课后习题答案部分

第二章2-1 何谓构件何谓运动副及运动副元素运动副是如何进行分类的答:参考教材5~7页;2-2 机构运动简图有何用处它能表示出原机构哪些方面的特征答:机构运动简图可以表示机构的组成和运动传递情况,可进行运动分析,也可用来进行动力分析;2-3 机构具有确定运动的条件是什么当机构的原动件数少于或多于机构的自由度时,机构的运动将发生什么情况答:参考教材12~13页;2-5 在计算平面机构的自由度时,应注意哪些事项答:参考教材15~17页;2-6 在图2-22所示的机构中,在铰链C、B、D处,被连接的两构件上连接点的轨迹都是重合的,那么能说该机构有三个虚约束吗为什么答:不能,因为在铰链C、B、D中任何一处,被连接的两构件上连接点的轨迹重合是由于其他两处的作用,所以只能算一处;2-7 何谓机构的组成原理何谓基本杆组它具有什么特性如何确定基本杆组的级别及机构的级别答:参考教材18~19页;2-8 为何要对平面高副机构进行“高副低代"“高副低代”应满足的条件是什么答:参考教材20~21页;2-11 如图所示为一简易冲床的初拟设计方案;设计者的思路是:动力由齿轮1输入,使轴 A连续回转;而固装在轴A上的凸轮2与杠杆3组成的凸轮机构将使冲头上下运动以达到冲压目的;试绘出其机构运动简图,分析其是否能实现设计意图并提出修改方案;解:1取比例尺绘制机构运动简图;2分析其是否可实现设计意图;F=3n- 2P l +P h –p’ -F’=3×3-2×4+1-0-0=0此简易冲床不能运动,无法实现设计意图;3修改方案;为了使此机构运动,应增加一个自由度;办法是:增加一个活动构件,一个低副;修改方案很多,现提供两种;※2-13图示为一新型偏心轮滑阎式真空泵;其偏心轮1绕固定轴心A转动,与外环2固连在一起的滑阀3在可绕固定轴心C转动的圆柱4中滑动;当偏心轮按图示方向连续回转时可将设备中的空气吸入,并将空气从阀5中排出,从而形成真空;1试绘制其机构运动简图;2计算其自由度;解:1取比例尺作机构运动简图如图所示;2 F=3n-2p1+p h-p’-F’=3×4-2×4+0-0-1=12-14 解:1绘制机构运动简图1)绘制机构运动简图F=3n-2P l +P h –p’-F’=3×5-2×7+0-0-0=12)弯曲90o 时的机构运动简图※2-15试绘制所示仿人手型机械手的食指机构的机构运动简图以手掌8作为相对固定的机架,井计算自由度;解:1取比倒尺肌作机构运动简图;2计算自由度1⨯=-F210⨯73=2-17 计算如图所示各机构的自由度;aF=3n- 2P l +P h–p’-F’=3×4-2×5+1 -0-0=1A处为复合铰链bF=3n-2P l +P h–p’-F’=3×7-2×8+2-0-2=12、4处存在局部自由度cp’= 2P l ’+P h ’-3n’=2×10+0-3×6=2,F=3n-2P l +P h–p’-F’=3×11-2×17+0-2-0=1C、F、K 处存在复合铰链,重复部分引入虚约束※2-21图示为一收放式折叠支架机构;该支架中的件1和5分别用木螺钉连接于固定台板1’和括动台板5’上.两者在D处铰接,使活动台板能相对于固定台极转动;又通过件1,2,3,4组成的铰链四杆机构及连杆3上E点处的销子与件5上的连杆曲线槽组成的销槽连接使活动台板实现收放动作;在图示位置时,虽在活动台板上放有较重的重物.活动台板也不会自动收起,必须沿箭头方向推动件2,使铰链B,D重合时.活动台板才可收起如图中双点划线所示;现已知机构尺寸l AB=l AD=90 mm;l BC=l CD=25 mm,其余尺寸见图;试绘制该机构的运动简图,并计算其自由度;解:F=3n-2p1+p b-p’-F’=3×5-2×6+1-0-1=12-23 图示为一内燃机的机构简图,试计算其自由度,并分析组成此机构的基本杆组;有如在该机构中改选EG为原动件,试问组成此机构的基本杆组是否与前有所不同;解:1计算自由度F=3n-2P l +P h–p’-F’=3×7-2×10+0-0-0=12拆组3EG 为原动件,拆组2-24 试计算如图所示平面高副机构的自由度,并在高副低代后分析组成该机构的基本杆组;1、解:1计算自由度F=3n-2P l +P h –p ’-F ’=3×5-2×6+1-0-1=12从结构上去除局部自由度、虚约束、多余的移动副、转动副如图2所示 3高副低代如图3所示 4拆组如图4所示 2、解:1计算自由度F=3n-2P l +P h –p ’-F ’=3×-2×9+1-0-1=12从结构上去除局部自由度、虚约束、多余的移动副、转动副如图b 所示 3高副低代如图c 所示 4拆组如图d 所示第三章3—1 何谓速度瞬心相对瞬心与绝对瞬心有何异同点 答:参考教材30~31页;3—2 何谓三心定理何种情况下的瞬心需用三心定理来确定 答:参考教材31页;※3-3机构中,设已知构件的尺寸及点B 的速度v B 即速度矢量pb,试作出各机构在图示位置时的速度多边形;※3-4 试判断在图示的两机构中.B 点足否都存在哥氏加速度又在何位置哥氏加速度为零怍出相应的III 级组II 级组II 级组II 级组机构位置图;并思考下列问题;1什么条件下存在氏加速度2根椐上一条.请检查一下所有哥氏加速度为零的位置是否已全部找出;3图 a 中,a kB2B3=2ω2v B2B3对吗为什么;解:1图 a 存在哥氏加速度,图 b 不存在;2由于a kB2B3==2ω2v B2B3故ω3,v B2B3中只要有一项为零,则哥氏加速度为零;图 a 中B 点到达最高和最低点时构件1,3.4重合,此时v B2B3=0,当构件1与构件3相互垂直.即_f=;点到达最左及最右位置时ω2=ω3=0.故在此四个位置无哥氏加速度;图 b 中无论在什么位置都有ω2=ω3=0,故该机构在任何位置哥矢加速度都为零; 3对;因为ω3≡ω2;3-5 在图示的曲柄滑块机构中,已知mm l mm l mm l mm l DE BD A AB 40,50,100,30C ====,曲柄以等角速度s rad /101=ω回转,试用图解法求机构在︒=451ϕ位置时,点D 、E 的速度和加速度以及构件2的角速度和角加速度;解:1以选定的比例尺l μ作机构运动简图(2)速度分析AB)(m/s 3.01⊥==AB B l v ωBCBCv v v v v C C C B C B C //32322⊥∨∨+=+=?方向:?0?大小:?根据速度影像原理,作BC BD bc bd //2=求得点d,连接pd;根据速度影像原理,作BDE bde ∆≈∆求得点e,连接pe,由图可知)(/r 2/m/s,175.0m/s,173.0,m/s 23.0223232顺时针s ad l bc c c v pe v pd v BC v v C C v E v D ========μωμμμ (3)加速度分析A)(B m/s 3221→==AB B l a ω根据速度影像原理作BC BD c b d b /''/''2=求得点'd ,连接''d p ;根据速度影像原理,作BDE e d b ∆≈'''∆求得点e ',连接e p '',由图可知)(/36.8//,m/s 8.2'',m/s 64.2''2'2'22222顺时针s rad l c n l a e p a d p a BC a BC B C a E a D =======μαμμτ 3-6 在图示机构中,设已知各构件的尺寸,原动件1以等角速度1ω顺时针方向转动,试用图解法求机构在图示位置时构件3上C 点速度和加速度比例尺任选;abc3-7 在图示机构中,已知mm l mm l mm l mm l mm l BC CD EF A AE 50,75,35,40,70B =====,曲柄以等角速度s rad /101=ω回转,试用图解法求机构在︒=501ϕ位置时,C 点的速度c v 和加速度c a ; 解:1以选定的比例尺l μ作机构运动简图;速度分析m/s 72.0m/s,4.01111====AF F AB B l v l v ωω AFAF EFv v v v F F F F F //15145⊥⊥∨+==方向:大小:v d 用速度影响法求2速度分析CD ED v v v CDD C ⊥⊥∨+=方向:大小: BC AB v v v CBB C ⊥⊥∨+=方向:大小:3加速度分析)(m/s 2.7A),(B m/s 42211221A F l a l a AF F AB B →==→==ωω AFA F v a a a a a F F rF F k F F F F F ///21511515145→→∨++==方向:大小:ω EFEF l a a a a a EFEF n E F E F F ⊥→++==方向:大小:2444450ωτa d 用加速度影像法求CD D C l a a a a CDCDnCD D C ⊥→∨∨++=方向:大小:23ωτ CBB C l a a a a CB CBnCB B C ⊥→∨∨++=方向:大小:22ωτ 2m/s 3''=⋅=a C c p a μ3-8 在图示凸轮机构中,已知凸轮1以等角速度s rad /101=ω转动,凸轮为一偏心圆,其半径︒====90,50,15,251B ϕmm l mm l mm R AD A ;试用图解法求构件2的角速度2ω和角加速度2α; 解:1以选定的比例尺l μ作机构运动简图;2速度分析:将机构进行高副低代,其替代机构如图b 所示;m/s 15.0141===AB B B l v v ωCDAB BD v v v B B B B //4242⊥⊥∨+=方向:大小:??)(/3.2//222逆时针s rad l pb l v BD v BD B ===μω3加速度分析A)m/s(B 5.12141→===AB B B l a a ω其中,)(顺时针222222222242242rad/s 9.143/''/,m/s 286.0,m/s 746.02=======BD a BD D B BD n D B B B k B B l b n l a l a v a μαωωτ 3-11 试求图示机构在图示位置时的全部瞬心; 解:a 总瞬心数:4×3/2=6对P 13:P 12、P 23、P 13在同一直线上, P 14、P 34、P 13在同一直线上 对P 24:P 23、P 34、P 24在同一直线上,P 12、P 14、P 24在同一直线上 d 总瞬心数:4×3/2=6对P 13:P 12、P 23、P 13在同一直线上, P 14、P 34、P 13在同一直线上 对P 24:P 23、P 34、P 24在同一直线上,P 12、P 14、P 24在同一直线上※3-12 标出图示的齿轮一连杆组合机构中所有瞬心,并用瞬心法求齿轮1与齿轮3的传动比ω1/ω3; 解:1瞬新的数目:K=NN-1/2=66-1/2=152)为求ω1/ω3需求3个瞬心P 16、P 36、P 13的位置,3)ω1/ω3= P 36P 13/P 16P 13=DK/AK,由构件1、3在K 点的速度方向相同,可知ω3与ω1同向;3-13 在图示四杆机构中,s rad mm l mm l CD AB /10,90,602===ω,试用瞬心法求:1当︒=165ϕ时点C 的速度C v ;当︒=165ϕ时构件3的BC 线上或其延长线上速度最小的一点E 的位置及其速度大小;3当0=C v 时ϕ角之值有两解;解:1以选定的比例尺l μ作机构运动简图(2)因P 24为构件2、4的顺心,则m/s 4.0rad/s 5.4424242242424=⋅==⋅=⋅=CD C D P A P l v DP AP l l ωωωω,对P 24:P 23、P 34、P 24在同一直线上,P 12、P 14、P 24在同一直线上(3)因构件3的BC 线上速度最小的点到绝对瞬心P 13的距离最近,故从P 13作BC 线的垂线交于E 点; 对P 13:P 12、P 23、P 13在同一直线上, P 14、P 34、P 13在同一直线上,故m/s 357.0131321313133313=⋅⋅=⋅⋅⋅=⋅⋅=⋅=E P B P l E P u B P v E P l v ABl l B l E P E ωμμωω(4)若0=C v ,则04=ω,DP AP l l DP A P 24242242424⋅=⋅=ωωω若024=A P ,则P 24与P 12重合,对P 24:P 23、P 34、P 24在同一直线上,P 12、P 14、P 24在同一直线上 若024=A P ,则A 、B 、C 三点共线;︒=⋅-++︒=︒=⋅-+=6.226)2arccos(1804.26)2arccos(22222221212211ADAC D C AD AC AD AC D C AD AC ϕϕ, ※3-15 在图示的牛头刨机构中,l AB =200 mnl,l CD =960 mm,l DE =160 mm, h=800mm,h 1=360mm,h 2=120mm;设曲柄以等角速度ω1=5 rad /s .逆时针方向回转.试以图解法求机构在φ1=135o 位置时.刨头点的速度v C ;sm AP v v P P P l p c l /24.1,,)2(151********===μωμ出瞬心利用顺心多边形依次定所示作机构运动简图,如图(1)以:解。
机械原理课后习题答案
inva )
=6.8mm
分度圆半径r=mz/2=10*18/2=90mm
齿槽宽:ea=2π ra/z-sa
分度圆齿厚s=π m/2=15.7mm
=28.1mm
齿顶圆半径ra=r+ha*m=90+10=100mm
基圆半径rb=rcosα=90cos200=84.57mm
inv200=0.0148
齿顶圆压力角
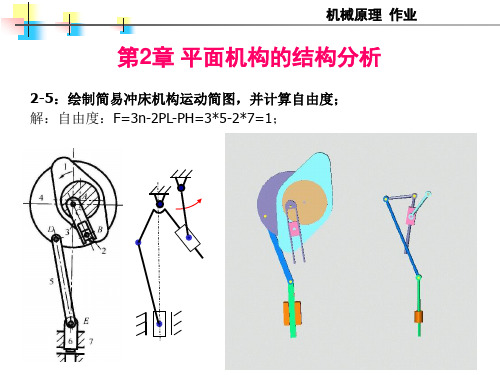
第2章 平面机构的结构分析
2-7:计算自由度,指出所有的复合铰链、局部自由度和虚约束,判定运动 是否确定; 解:自由度:
a) F=3n-2PL-PH=3*3-2*4=1;确定 b) F=3n-2PL-PH=3*6-2*8=2;不确定 c) F=3n-2PL-PH=3*4-2*5-1=1;确定 d) F=3n-2PL-PH=3*4-2*5-1=1;确定
从而lAB+lBC, lBC-lAB可求得,最后确定lAB和lBC; 设计步骤:
①取一点A,并定D点; ②以D为圆心,作圆; 根据CD摆角15°定C1,C2点; ③ 量取lAC1,lAC2
lAB+lBC=430 lBC-lAB=348
C2 15° 15°C1
B A
lAB=41
A
B1
D
lBC=389
B2
虚约束
局部自由度
复合铰链
a)
b)
c)
d)
机械原理 作业
第2章 平面机构的结构分析
2-8:计算自由度;确定机构所含杆组的数目与级别;确定机构级别。画出 瞬时替代机构; 解:自由度:
a) F=3n-2PL-PH=3*7-2*10=1;Ⅱ级 b) F=3n-2PL-PH=3*6-2*8-1=1;Ⅲ级
机械原理与机械设计-上册-范元勋-课后答案
介绍本课程的学习目的、内容及学习 方法,强调理论与实践相结合的重要 性。
机械原理部分 绪论
01
课程学习方法
02
内容
03
重视基本概念的理解:理解机械的基本概念、原理 和特点是学好本课程的基础。
机械原理部分 绪论
掌握分析方法
学会运用机构分析的基本方法,如运 动分析和力分析,是解决实际问题的 关键。
传动
定义
利用两齿轮之间的啮合实现动力的传递。
应用
直齿圆柱齿轮、斜齿圆柱齿轮、锥齿轮等。
特点
效率高,结构紧凑,传动平稳可靠,但制造安装要求高。
04
轴系零部件部分
轴
01
轴的材料与制造
02
轴的材料通常为钢、铸铁或合金钢,也可以根据需要选择其他
材料。
轴的制造方法包括铸造、锻造、切削加工和磨削加工等。
03
加强实践环节
通过实验、课程设计和实习等实践环 节,加深对理论知识的理解,提高实 际操作能力。
机械原理部分 绪论
机构学的重要性
内容
机构学在机械工程中的地位:机构学是机械工程的核心学科之一,为各种机械装置的设计、分析和优化 提供了理论基础。
机械原理部分 绪论
机构学的发展趋势
随着科技的不断进步,机构学在理论和应用方面也在不断创新和发展,如机器 人技术、微型机械等。
传动
定义
利用带与带轮之间的摩擦力实现动力的传递。
应用
V带、平带等。
传动
• 特点:结构简单,成本低,缓冲吸振,过载时打滑可保护其 他零件不受损坏。
传动
定义
利用链条与链轮之间的啮合实现动力的传递。
应用
滚子链、齿形链等。
机械原理习题册答案
机械原理习题册答案机械原理习题册答案机械原理是工程学中的重要基础课程,它涉及到物体的平衡、运动和力学性质等方面。
在学习过程中,习题是非常重要的辅助工具,通过解答习题可以巩固所学的理论知识,提高解决问题的能力。
本文将为大家提供一些机械原理习题册的答案,希望能对大家的学习有所帮助。
第一章:力的平衡1. 如图所示,一个质量为10kg的物体受到一个斜面上的力F1,斜面与水平面的夹角为30度。
已知物体在斜面上不发生滑动,求力F1的大小。
解答:根据力的平衡条件,物体在斜面上的重力与斜面对物体的支持力之和等于零。
设物体的重力为G,支持力为N,则有:G = mg = 10kg * 9.8m/s^2 = 98NN = G * cosθ = 98N * cos30° ≈ 84.85N由此可得,力F1的大小为84.85N。
2. 如图所示,一个质量为5kg的物体受到一个斜面上的力F2,斜面与水平面的夹角为45度。
已知物体在斜面上发生滑动,滑动摩擦系数为0.2,求力F2的大小。
解答:根据力的平衡条件,物体在斜面上的重力与斜面对物体的支持力之和等于物体受到的力F2。
设物体的重力为G,支持力为N,则有:G = mg = 5kg * 9.8m/s^2 = 49NN = G * cosθ = 49N * cos45° ≈ 34.65N摩擦力f = μN = 0.2 * 34.65N = 6.93N由此可得,力F2的大小为49N + 6.93N = 55.93N。
第二章:力的作用效果1. 如图所示,一个质量为2kg的物体受到一个力F3,使其沿水平方向匀速运动。
已知物体受到的摩擦力为4N,求力F3的大小。
解答:根据力的作用效果,物体受到的合外力等于物体的质量乘以加速度。
设物体的质量为m,加速度为a,则有:F3 - 4N = ma由于物体沿水平方向匀速运动,加速度a为零。
因此,有:F3 - 4N = 0F3 = 4N由此可得,力F3的大小为4N。
机械原理课后习题答案.pdf

[解]
(1)取μι作机构运动简图;
μl
=
0.002
m mm
C3
lBC =
l
2 AB
+
l
2 AC
−
l AB
⋅ lAB
⋅ cos135
= 302 + 1002 − 30 ×100 × cos135 = 123 (mm)
B
D
2
1 ω1
A
ϕ1
4
E
(2)速度分析 取C为重合点:C( C2, C3)
vB → vC 2 → vD ,vE → ω2
p(c3)
ω2
2
D
c2
2) 求aC2
aC 2 = aB
+ aCn 2B
+
at C 2B
=
aC 3
+
aCk
2C 3
+ aCr 2C 3
方向: B→A C→B ⊥CB
0 ⊥CБайду номын сангаас向下 ∥BC e
大小: √ √
?
0√
?
E
d
b
其中:
an C 2B
= ω2 2
lBC
=
2.02
4
C P34
1
A P12
题3-1 试求图示各机构在图示位置时全部瞬心。
b) P13
P34 B
3
P 23 →∞
2
P12
A
4
C P14→∞
P24
1
题3-1 试求图示各机构在图示位置时全部瞬心。
c)
P13 P14 C
4
→∞ P 34
M
vM
机械原理课后全部习题解答

机械原理课后全部习题解答文档编制序号:[KKIDT-LLE0828-LLETD298-POI08]《机械原理》习题解答机械工程学院目录第1章绪论 (1)第2章平面机构的结构分析 (3)第3章平面连杆机构 (8)第4章凸轮机构及其设计 (15)第5章齿轮机构 (19)第6章轮系及其设计 (26)第8章机械运动力学方程 (32)第9章平面机构的平衡 (39)第一章绪论一、补充题1、复习思考题1)、机器应具有什么特征机器通常由哪三部分组成各部分的功能是什么2)、机器与机构有什么异同点3)、什么叫构件什么叫零件什么叫通用零件和专用零件试各举二个实例。
4)、设计机器时应满足哪些基本要求试选取一台机器,分析设计时应满足的基本要求。
2、填空题1)、机器或机构,都是由组合而成的。
2)、机器或机构的之间,具有确定的相对运动。
3)、机器可以用来人的劳动,完成有用的。
4)、组成机构、并且相互间能作的物体,叫做构件。
5)、从运动的角度看,机构的主要功用在于运动或运动的形式。
6)、构件是机器的单元。
零件是机器的单元。
7)、机器的工作部分须完成机器的动作,且处于整个传动的。
8)、机器的传动部分是把原动部分的运动和功率传递给工作部分的。
9)、构件之间具有的相对运动,并能完成的机械功或实现能量转换的的组合,叫机器。
3、判断题1)、构件都是可动的。
()2)、机器的传动部分都是机构。
()3)、互相之间能作相对运动的物件是构件。
()4)、只从运动方面讲,机构是具有确定相对运动构件的组合。
()5)、机构的作用,只是传递或转换运动的形式。
()6)、机器是构件之间具有确定的相对运动,并能完成有用的机械功或实现能量转换的构件的组合。
()7)、机构中的主动件和被动件,都是构件。
()2 填空题答案1)、构件 2)、构件 3)、代替机械功 4)、相对运动 5)、传递转换6)、运动制造 7)、预定终端 8)、中间环节 9)、确定有用构件3判断题答案1)、√ 2)、√ 3)、√ 4)、√ 5)、× 6)、√ 7)、√第二章 机构的结构分析2-7 是试指出图2-26中直接接触的构件所构成的运动副的名称。
(完整版)机械原理课后全部习题答案

机械原理课后全部习题答案目录第1章绪论 (1)第2章平面机构的结构分析 (3)第3章平面连杆机构 (8)第4章凸轮机构及其设计 (15)第5章齿轮机构 (19)第6章轮系及其设计 (26)第8章机械运动力学方程 (32)第9章平面机构的平衡 (39)第一章绪论一、补充题1、复习思考题1)、机器应具有什么特征?机器通常由哪三部分组成?各部分的功能是什么?2)、机器与机构有什么异同点?3)、什么叫构件?什么叫零件?什么叫通用零件和专用零件?试各举二个实例。
4)、设计机器时应满足哪些基本要求?试选取一台机器,分析设计时应满足的基本要求。
2、填空题1)、机器或机构,都是由组合而成的。
2)、机器或机构的之间,具有确定的相对运动。
3)、机器可以用来人的劳动,完成有用的。
4)、组成机构、并且相互间能作的物体,叫做构件。
5)、从运动的角度看,机构的主要功用在于运动或运动的形式。
6)、构件是机器的单元。
零件是机器的单元。
7)、机器的工作部分须完成机器的动作,且处于整个传动的。
8)、机器的传动部分是把原动部分的运动和功率传递给工作部分的。
9)、构件之间具有的相对运动,并能完成的机械功或实现能量转换的的组合,叫机器。
3、判断题1)、构件都是可动的。
()2)、机器的传动部分都是机构。
()3)、互相之间能作相对运动的物件是构件。
()4)、只从运动方面讲,机构是具有确定相对运动构件的组合。
()5)、机构的作用,只是传递或转换运动的形式。
()6)、机器是构件之间具有确定的相对运动,并能完成有用的机械功或实现能量转换的构件的组合。
()7)、机构中的主动件和被动件,都是构件。
()2 填空题答案1)、构件2)、构件3)、代替机械功4)、相对运动5)、传递转换6)、运动制造7)、预定终端8)、中间环节9)、确定有用构件3判断题答案1)、√2)、√3)、√4)、√5)、×6)、√7)、√第二章 机构的结构分析2-7 是试指出图2-26中直接接触的构件所构成的运动副的名称。
机械原理课后答案
机械原理课后习题答案(顺序有点乱,不过不影响)第2章2-1 何谓构件?何谓运动副及运动副元素?运动副是如何进行分类的?答:参考教材5~7页。
2-2 机构运动简图有何用处?它能表示出原机构哪些方面的特征?答:机构运动简图可以表示机构的组成和运动传递情况,可进行运动分析,而且也可用来进行动力分析。
2-3 机构具有确定运动的条件是什么?当机构的原动件数少于或多于机构的自由度时,机构的运动将发生什么情况?答:参考教材12~13页。
2-4 何谓最小阻力定律?试举出在机械工程中应用最小阻力定律的1、2个实例。
2-5 在计算平面机构的自由度时,应注意哪些事项?答:参考教材15~17页。
2-6 在图2-20所示的机构中,在铰链C、B、D处,被连接的两构件上连接点的轨迹都是重合的,那么能说该机构有三个虚约束吗?为什么?答:不能,因为在铰链C、B、D中任何一处,被连接的两构件上连接点的轨迹重合是由于其他两处的作用,所以只能算一处。
2-7 何谓机构的组成原理?何谓基本杆组?它具有什么特性?如何确定基本杆组的级别及机构的级别?答:参考教材18~19页。
2-8 为何要对平面高副机构进行“高副低代"?“高副低代”应满足的条件是什么?答:参考教材20~21页。
2-9 任选三个你身边已有的或能观察到的下列常用装置(或其他装置),试画出其机构运动简图,并计算其自由度。
1)折叠桌或折叠椅;2)酒瓶软木塞开盖器;3)衣柜上的弹簧合页;4)可调臂台灯机构;5)剥线钳;6)磁带式录放音机功能键操纵机构;7)洗衣机定时器机构;8)轿车挡风玻璃雨刷机构;9)公共汽车自动开闭门机构;10)挖掘机机械臂机构;…。
2-10 请说出你自己身上腿部的髋关节、膝关节和踝关节分别可视为何种运动副?试画出仿腿部机构的机构运动简图,并计算其自由度。
2-11图示为一简易冲床的初拟设计方案。
设计者的思路是:动力由齿轮j输入,使轴A连续回转;而固装在轴^上的凸轮2与杠杆3组成的凸轮机构使冲头4上下运动,以达到冲压的目的。
机械原理第七版习题解答(第4、7、11章)
nmax
(1 2 )nm
(1 0.01) 620 623.1r / min 2
3)求装在曲轴上旳飞轮转动惯量 JF :
Wmax AbABc
(200 116.67) ( 20 200 116.67 130 200 116.67)
2
6 180
200
180
200
67.26N m
小圆为摩擦圆)。 C
1
《机械原理》习题课
解 arctan f
总反力 FR12 及 FR32 旳方位如图
F F
题4-14
机械原理习题解答
(第7章-机械旳运转及其速度波动旳调整)
《机械原理》习题课
7-7图示为一机床工作台旳传动系统。设已知各齿 轮旳齿数,齿轮3旳分度圆半径r3,各齿轮旳转动
惯量 J1, J2 , J2, J3 ,齿轮1直接装在电动机轴上,
故J F
900Wmax
2n2[ ]
900 67.26
2 6202 0.01
1.596kg m2
机械原理习题解答
(第11章-齿轮系及其设计)
《机械原理》习题课
11-11图示为一手摇提升装置,其中各轮齿数均已
知,试求传动比 i15,并指出当提升重物时手柄旳
转向。
《机械原理》习题课
答 此轮系为空间定 轴轮系,且
故J1中包括了电动机转子旳转动惯量;工作台和 被加工零件旳重量之和为G。当取齿轮1为等效构 件时,试求该机械系统旳等效转动惯量Je。
《机械原理》习题课
解 根据等效转动惯量旳等效原则,有
1 2
J
2
e1
1 2
J112
1 2
(J2
J2 )22
新版南京理工大学电子信息考研经验考研参考书考研真题

回首过去一年的各种疲惫,困顿,不安,怀疑,期待等等全部都可以告一段落了,我真的是如释重负,终于可以安稳的让自己休息一段时间了。
虽然时间如此之漫长,但是回想起来还是历历在目,这可真是血与泪坚坚实实一步步走来的。
相信所有跟我一样考研的朋友大概都有如此体会。
不过,这切实的果实也是最好的回报。
在我备考之初也是看尽了网上所有相关的资料讯息,如大海捞针一般去找寻对自己有用的资料,所幸的是遇到了几个比较靠谱的战友和前辈,大家共享了资料和经验。
他们这些家底对我来讲还是非常有帮助的。
而现如今,我也终于可以以一个前人的姿态,把自己的经验下下来,供大家翻阅,内心还是比较欣喜的。
首先当你下定决心准备备考的时候,要根据自己的实际情况、知识准备、心理准备、学习习惯做好学习计划,学习计划要细致到每日、每周、每日都要规划好,这样就可以很好的掌握自己的学习进度,稳扎稳打步步为营。
另外,复试备考计划融合在初试复习中。
在进入复习之后,自己也可以根据自己学习情况灵活调整我们的计划。
总之,定好计划之后,一定要坚持下去。
由于篇幅较长,还望各位同学能够耐心看完,在结尾处附上我的学习资料供大家下载。
南京理工大学电子信息的初试科目为:(101)思想政治理论(204)英语二(302)数学二(812)机械原理或(823)电子技术基础参考书目为:(812)机械原理《机械原理》高等教育出版社郑文纬、吴克坚《机械原理与机械设计》上册清华大学出版社范元勋、张庆(823)电子技术基础《电工学下册》(第五版)高等教育出版社秦增煌《模拟电路与数字电路》电子工业出版社寇戈、蒋立平先说一下我的英语单词复习策略真题阅读的做法第一遍,做十年真题【剩下的近三年的卷子考试前2个月再做】,因为真题要反复做,所以前几遍都是把自己的答案写在一张A4纸上,第一遍也就是让自己熟悉下真题的感觉,虐虐自己知道英语真题的大概难度,只做阅读理解,新题型完形填空啥的也不要忙着做,做完看看答案,错了几个在草稿纸上记下来就好了,也不需要研究哪里错了为什么会错…第一遍很快吧因为不需要仔细研究,14份的试卷,一天一份的话,半个月能做完吧,偷个懒一个月肯定能做完吧【第一遍作用就是练练手找到以前做题的感觉,千万不要记答案,分析答案…】ps:用书选择:木糖英语闪电单词+木糖英语真题。
机械原理课后题答案

机械原理课后题答案1. 列举并解释一下机械原理中的三大支配因素。
- 动力:指施加在机构元件上的力或力矩,用来驱动机构执行运动或产生工作效果。
- 运动:指机构元件相对运动的方式、路径和速度。
- 连结:指机构元件之间的连接方式,包括直接和间接连接两种形式。
2. 解释一下机械原理中的三大运动副类型。
- 滑动副:两个机构元件之间只能沿着一条确定的直线运动,如推拉杆、滑块等。
- 旋转副:两个机构元件之间只能绕一条确定的轴线旋转运动,如轴承、齿轮等。
- 滚动副:两个机构元件之间存在滚动运动,如滚子轴承、滚珠丝杠等。
3. 什么是机械原理中的受力分析方法?受力分析方法是指通过分析机构元件之间的力和力矩关系,找出各个元件的受力情况,以解决机构设计和运动性能分析的方法。
常用的受力分析方法包括力平衡法、力矩平衡法、虚功原理等。
4. 什么是力平衡法?力平衡法是一种受力分析方法,通过分析机构元件之间的力平衡关系,得到各个元件所受力的大小和方向。
它基于牛顿第一定律,即所有物体受力之和为零,可用来解决机构中受力平衡问题,确定力的大小和方向。
5. 解释一下力矩平衡法。
力矩平衡法是一种受力分析方法,通过分析机构元件之间的力矩平衡关系,得到各个元件所受力的大小和方向。
在机械原理中,力矩平衡法常被用于解决转动副运动问题,根据力矩平衡条件,求解未知力矩和力矩的方向。
6. 什么是虚功原理?虚功原理是一种受力分析方法,通过分析机构元件之间的虚功平衡关系,得到各个元件所受力的大小和方向。
虚功原理是基于功率平衡的原理,即虚功平衡原理,在机械原理中常用于分析运动副的受力情况和功率传递效率。
7. 介绍一下机械原理中的摩擦现象。
摩擦是指两个物体相对运动时由接触面之间的相互作用力导致的阻碍运动的力。
在机械运动中,正常情况下不可避免地存在摩擦力,摩擦力会导致机械能的损失、能量的消耗和部件的磨损。
因此在机械原理中需要对摩擦进行充分的考虑和分析。
《机械原理与机械设计》(上册)课后习题答案
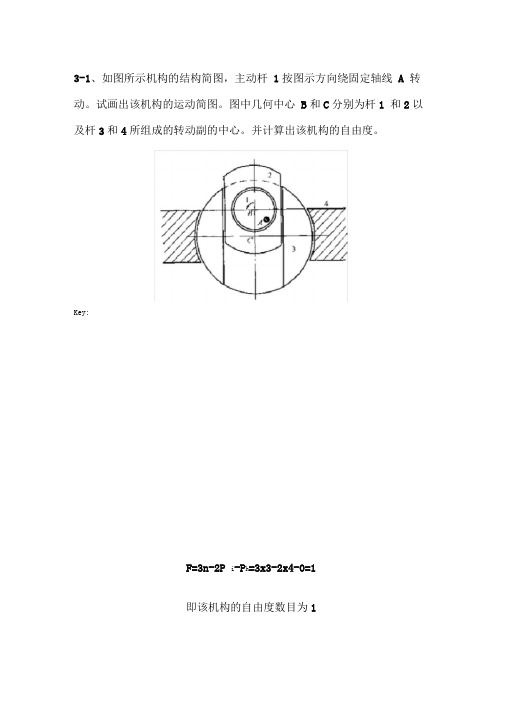
3-1、如图所示机构的结构简图,主动杆1按图示方向绕固定轴线 A 转动。
试画出该机构的运动简图。
图中几何中心B和C分别为杆1 和2以及杆3和4所组成的转动副的中心。
并计算出该机构的自由度。
Key:
F=3n-2P i-P h=3x3-2x4-0=1
即该机构的自由度数目为1
3-2 如图所示为简易冲床机构结构简图,主动杆 1 按图示方向绕固定
轴线A转动;杆1和滑块2组成转动副B ;杆3绕固定轴线C转动, 4 为连杆,杆 5 为冲头,在导路 6 中往复移动。
试绘制该机构的运动示意图并计算机构的自由度。
Key:
F=3n-2P l-p h=3x5-2x7-0=1 4-1
V P24=AP 24X W2=DP24X W 4
故 W4= AP24xW2/DP24=35.316x10/(35.316+41.5)=4.597(rad/s)
Vc=CDxW4=30x4.597=137.91(mm/s)
2) BC上线速度最小的点为 E点,如图所示
W3=Vc/CP13=137.91/(30+24.804)=2.516(rad/s)
V E=P13ExW3=47.718x2.516=120.058(mm/s)
3) Vc=Vd=0,故构件4静止。
V P24=0,因构件2为主动件,构件上静止点只可能为A点,故P24与A点重合。
该情况只可能发生在BC与AB重合的两种情况。
C
〔IJ.G9 :
B n &。
机械原理课后习题答案

机械原理课后习题答案机械原理是工程学科中的一个重要分支,它涉及到机械设计、运动学、动力学分析等多个方面。
课后习题是帮助学生巩固和深化理解这些概念的有效手段。
以下是一些机械原理课后习题的答案示例:题目1:简述四连杆机构的工作原理。
答案:四连杆机构是一种基本的平面运动机构,由四个连杆组成,其中至少有一个连杆是固定的,称为框架。
四连杆机构的工作原理是通过改变连杆的长度和角度,实现运动的转换。
例如,曲柄滑块机构就是一种典型的四连杆机构,它能够将曲柄的旋转运动转换为滑块的直线运动。
题目2:什么是静平衡和动平衡?答案:静平衡指的是物体在静止状态下,所有力的矢量和为零,即物体处于平衡状态。
动平衡则是指物体在运动状态下,所有力和力矩的矢量和为零,物体在运动过程中保持平衡。
动平衡通常需要考虑旋转物体的离心力和惯性力。
题目3:解释什么是惯性力和惯性力矩。
答案:惯性力是指当物体受到外力作用时,由于物体的惯性,会倾向于保持原来的运动状态。
惯性力的大小等于物体的质量乘以加速度。
惯性力矩则是指物体在旋转过程中,由于惯性作用产生的力矩,其大小等于物体的质量乘以半径乘以加速度。
题目4:简述齿轮传动的基本原理。
答案:齿轮传动是一种通过齿轮之间的啮合来传递运动和动力的机械传动方式。
基本原理是两个或多个齿轮的齿相互嵌合,使得一个齿轮的旋转能够带动另一个齿轮旋转。
齿轮传动可以改变转速和扭矩,实现不同的传动比。
题目5:什么是机械效率?答案:机械效率是指机械系统输出的有用功与输入的总功之比。
它是衡量机械系统性能的一个重要指标,反映了机械系统在能量转换过程中的效率。
机械效率越高,说明系统在能量转换过程中损失的能量越少。
请注意,以上答案仅为示例,具体的习题答案需要根据实际的题目内容来编写。
如果需要针对特定的习题提供答案,请提供具体的题目信息。
机械原理与机械设计-上册-范元勋-课后答案
(bc 2 ) v lC 2 B
37 .5 0.0067 0 .124
2秒 1
由V
C
2
的代表向量
B
bc
知
2
的方向为逆时针。
3
(4)求 a D , a E , 3.
aB
a
n B
l
AB
2 1
0 .03
10 2
3米
/ 秒 2。
由aC2 aB
an C2B
at C2B
aC3
ar C 2C 3
ak C 2C 3
3-8 作机架AD连线,作摇杆的一个与 机架成45°角的极限位置C1连AC1 且作θ角与摇杆轨迹交点即为摇 杆另一极限位置C2。
解: 180 K 1 36,
K 1
取l
2 mm mm
情况一AA:CC12
ab, ba
AC2
86,
AC1
3
6
a
l
AC 2
2
AC1
2
25
50 (mm )
b
l
AC 2
4-1解
(a) 1、画出基圆 2、求反转后从动件导路的位置 3、求理论廓线 4、在理论廓线上画出滚子 5、过滚子的接触点作其法线,法 线与导路的方向线之间的夹角为压力角α,滚子的中心沿导 路的方向至基圆的轮廓线之间的距离即为所求的位移S。
4-1解 (a)`
1、画出基圆 2、求反转后从动件导路的位置 3、求理论廓线 4、在理论廓线上画出滚子 5、过滚子的接触点作其法线,法 线与导路的方向线之间的夹角为压力角α,滚子的中心沿导 路的方向至基圆的轮廓线之间的距离即为所求的位移S。
AC 1 AC 2
2
25
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
F→G
VF2 lFG
⊥FG π→e΄ F→E
? e' a
VF2E lFE
⊥FE
?
5
aFt lFG
f '" f ' a
lFG
22 rad s2
将
f
"'
f
'移至F知
逆时针
5
中文书:2-9已知曲柄长度l1=0.05m ,角速度ω1=20rad/s,图解法确定 该机构在1=45º时导杆3的速度v3与角速度a3.
20
m s2
作加速度多边形:
VB2 1 lAB 20 0.05 1m s 取v作速度多边形VB3 v pb3 0.72
aB3 a b3' 14 m s
方向水平向左
2-10
VB
1
l
方向
AB
AB
VF1 VF3 VD VC
VB VC
VF 3 VF1 VF 3F1
⊥FE ⊥FA ∥AF
解题思路: VB1 VB2 构件2与构件3在B处形成重合点
待求点 为B3动点,求
VB3
VB3 VB2 VB3B2
//导路 ⊥AB ⊥导路
?
1 lAB ?
VB2 1 lAB 20 0.05 1m s 取v作速度多边形VB3 v pb3 0.72
方向水平向左
求加速度 aB3
aB3
移至F点知顺时针
2)求加速度 aB aC aE aF 5 加速度影像法求
aE
aCn aCt aB aCnB aCt B
C→D ⊥CD B→A C→B ⊥CB
BC CE BE b' c' c' e' b' e'
VC2 lCD
?
12 lAB
VC2B lCB
?
求得e΄
aFn aFt aE aFnE aFt E
AB, C2B
// C2B
pb
bc2
c3c2
式中VC3 0
作速度多边形pbc2,然后按速度影象法,作Δbec2∽ΔBEC得 e点,再从e点作ed⊥bc2得d点,则 VE=(pe)μv=26×0.0067=0.1742m/s指向如图。 VD=(pd)μv=34×0.0067=0.2278m/s指向如图
?
1
l
?
AF
根据速度 影像法求
VD
VC VD VCD VB VCB
P→d ⊥CD P→b ⊥CB
pd v ?
1
l
?
AB
VC
v pc 0.45m s
4
VCD lCD
8.7 rad s ,
3
VF3 lFE
pf3 lFE
20.3,逆
5
VCB lCB
1rad s ,顺
求加速度
根据影像法求
aD、a B
aF1 aF 3 aD aD aC aB
aFn 3
aFt 3
aF1
aF3F1
ak F 3F1
F→E ⊥FE F→A ∥AF ⊥f1f3
VF21 ?
lFE
?
12 lFA
21VF 3F1
aC aB aCnB aCt B aD aCnD aCt D
B→A C→B ⊥CB π→d’ C→D ⊥CD
1 45, 1 30rad / s, 逆时针
求: 5 , 5
解:1)求速度 VB VC VE VF 5
VC VB VCB
⊥CD ⊥AB ⊥CB ? ω1lAB ?
根据速度影像求
VE
VF VE VFE
⊥GF P→e ⊥FE
?
Pev?
5
f p v
lGF
1.7 rad s 将pf
max
arcsin a b
11.5
sin e 0.25 14.47
ba
' 4.88
180 4.88 K 180 4.88 1.056
sin ' e 0.1667 ' 9.5
ba
2—5
解:1)求速度 VB VC VE VF 5
VC VB VCB
12 lAB 52 lBC ?
a
d '
2 4
lCD
?
aC a c' 9.5 m s2
lAB=30mm,lAC=100mm,lBD=50mmllDE=40mm,φ1=45º,等角速度ω1=10rad/s, 求E、D的速度和加速度,构件3的角速度和角加速度.
解:(1)选取l 0.002米/mm作机构运动简图。
(2)解题步骤为: VB VC 2 (VD ,VE )及aB aC2 (aD , aE )
(3)求VD ,VE,3。
VB l AB 1 0.0310 0.3米/秒
取pb
45毫米表示VB,则v
0.3 45
0.0067
米/秒。 毫米
由VC 2 V BVC 2B VC3 VC 2C3 求VC3
aB2
ar B3B2
//导路 B→A ⊥导路
?
12
l
?
AB
aB2
20 2
lAB
400
0.05
20
m s2
作加速度多边形:
aB3 a b3' 14 m s
方向水平向左
3-3
当滑块 C至左极限和右极限位置时,曲柄与连杆在两共线位置, 曲柄在两位置的极位夹角θ=0,K=1,滑块的压力角在0~αmax 之间变化.
将
f
"'
f
'移至F知
逆时针
5
2-9
VB1 VB2 构件2与构件3在B处形成重合点
求加速度
待求点 为B3动点,求
VB3
VB3 VB2 VB3B2
//导路 ⊥AB ⊥导路
aB3 aB2 ar B3B2
//导路 B→A ⊥1 lAB ?
aB2
20 2
lAB
400
0.05
习题 1.画出图示平面机构的运动简图,并计算其自由度。
(a)
(b)
(c)
1-6自动倾卸机构
3、计算图示平面机构的自由度;机构中的原动件用圆弧箭头表示。
中文书2—5颚式破碎机 已知xD=260mm, yD=480mm, xG=400mm, yG=200mm,
lAB LCE 100 mm, lBC LBE 500 mm, lCD 300 mm, lEF 400 mm, lGF 685 mm, lBC LBE 500 mm
⊥CD ⊥AB ⊥CB ? ω1lAB ?
根据速度影像求
VE
VF VE VFE
⊥GF P→e ⊥FE
?
Pev?
5
f p v
lGF
1.7 rad s 将pf
移至F点知顺时针
2)求加速度 aB aC aE aF 5 加速度影像法求
aE
aCn aCt aB aCnB aCt B
C→D ⊥CD B→A C→B ⊥CB
BC CE BE b' c' c' e' b' e'
VC2 lCD
?
12 lAB
VC2B lCB
?
求得e΄
aFn aFt aE aFnE aFt E
F→G
VF2 lFG
⊥FG π→e΄ F→E
? e' a
VF2E lFE
⊥FE
?
5
aFt lFG
f '" f ' a
lFG
22 rad s2