步进电机的选用及电机型号参数尺寸标准
步进电机的选用及电机型号、参数、尺寸标准

步进电机是一种能将数字输入脉冲转换成旋转或直线增量运动的电磁执行元件。
每输入一个脉冲电机转轴步进一个步距角增量。
电机总的回转角与输入脉冲数成正比例,相应的转速取决于输入脉冲频率。
步进电机是机电一体化产品中关键部件之一,通常被用作定位控制和定速控制。
步进电机惯量低、定位精度高、无累积误差、控制简单等特点。
广泛应用于机电一体化产品中,如:数控机床、包装机械、计算机外围设备、复印机、传真机等。
选择步进电机时,首先要保证步进电机的输出功率大于负载所需的功率。
而在选用功率步进电机时,首先要计算机械系统的负载转矩,电机的矩频特性能满足机械负载并有一定的余量保证其运行可靠。
在实际工作过程中,各种频率下的负载力矩必须在矩频特性曲线的范围内。
一般地说最大静力矩Mjmax大的电机,负载力矩大。
选择步进电机时,应使步距角和机械系统匹配,这样可以得到机床所需的脉冲当量。
在机械传动过程中为了使得有更小的脉冲当量,一是可以改变丝杆的导程,二是可以通过步进电机的细分驱动来完成。
但细分只能改变其分辨率,不改变其精度。
精度是由电机的固有特性所决定。
论文天地欢迎您选择功率步进电机时,应当估算机械负载的负载惯量和机床要求的启动频率,使之与步进电机的惯性频率特性相匹配还有一定的余量,使之最高速连续工作频率能满足机床快速移动的需要。
选择步进电机需要进行以下计算:(1)计算齿轮的减速比根据所要求脉冲当量,齿轮减速比i计算如下:i=(φ.S)/(360.Δ) (1-1)式中φ---步进电机的步距角(o/脉冲)S ---丝杆螺距(mm)Δ---(mm/脉冲)(2)计算工作台,丝杆以及齿轮折算至电机轴上的惯量Jt。
Jt=J1+(1/i2)[(J2+Js)+W/g(S/2π)2] (1-2)式中Jt ---折算至电机轴上的惯量(Kg.cm.s2)J1、J2 ---齿轮惯量(Kg.cm.s2)Js ----丝杆惯量(Kg.cm.s2) W---工作台重量(N)S ---丝杆螺距(cm)(3)计算电机输出的总力矩MM=Ma+Mf+Mt (1-3)Ma=(Jm+Jt).n/T× 1.02×10ˉ 2 (1-4)式中Ma ---电机启动加速力矩(N.m)Jm、Jt---电机自身惯量与负载惯量(Kg.cm.s2)n---电机所需达到的转速(r/min)T---电机升速时间(s)Mf=(u.W.s)/(2πηi)×10ˉ 2 (1-5)Mf---导轨摩擦折算至电机的转矩(N.m)u---摩擦系数η---传递效率Mt=(Pt.s)/(2πηi)×10ˉ 2 (1-6)Mt---切削力折算至电机力矩(N.m)Pt---最大切削力(N)(4)负载起动频率估算。
信浓步进电机STP-59D3039选型及使用说明
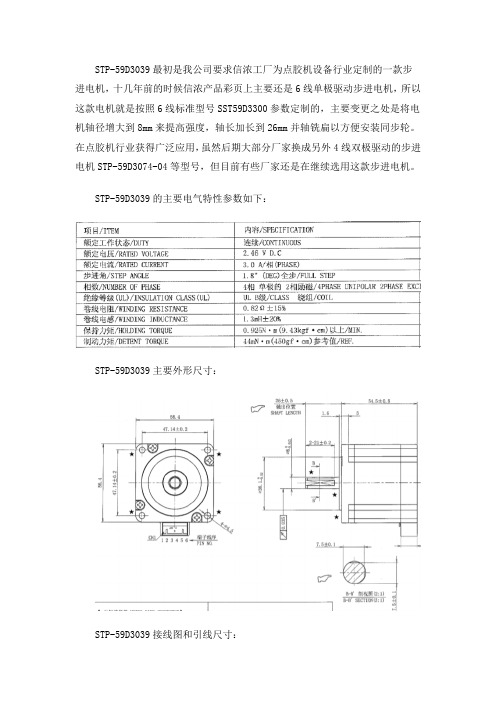
STP-59D3039最初是我公司要求信浓工厂为点胶机设备行业定制的一款步进电机,十几年前的时候信浓产品彩页上主要还是6线单极驱动步进电机,所以这款电机就是按照6线标准型号SST59D3300参数定制的,主要变更之处是将电机轴径增大到8mm来提高强度,轴长加长到26mm并轴铣扁以方便安装同步轮。
在点胶机行业获得广泛应用,虽然后期大部分厂家换成另外4线双极驱动的步进电机STP-59D3074-04等型号,但目前有些厂家还是在继续选用这款步进电机。
STP-59D3039的主要电气特性参数如下:STP-59D3039主要外形尺寸:STP-59D3039接线图和引线尺寸:单极驱动的时候按照上图接线,双极驱动的时候,半绕接线可以不接A-B-,接A,Acom和B,Bcom,串联接线的时候不接Acom,Bcom,接AA-和BB-。
但现在很少用户会选用STP-59D3039本来设计目的的单极驱动方式,绝大多数用双极驱动,STP-59D3039用于点胶机的话,通常适合用半绕组接线,这样额定电流还是3A,但总有一半的绕组是浪费的,不如换成STP-59D3039并联特性参数的的STP-59D3074-04,同样电流情况下扭矩和STP-59D3039的一样,但发热量只有STP-59D3039的一半,所以STP-59D3074-04在发热量和STP-59D3039一样的情况下,可以将电流增大到4.2A来获得更大的力矩,而STP-59D3039在4.2A电流下长时间工作可能因过热烧掉了。
但如果有负载在低于300rpm转速下工作,可以用STP-59D3039串联接线,额度电流变成2.1A,这时候电机距频图可以参考SST59D3155。
综上所述,如果不是用串联接线用于低速运行场合,我们不太推荐选用STP-59D3039。
STP-59D3039单极驱动下的距频图和半绕接线可以参考SST59D3300距频图,串联接线参考SST59D3155距频图。
步进电机选型手册

负载稳定性:考虑负载的稳定性对电机性能的影响
运动特性
步进电机的精度与步距角成正比
步进电机的转速与脉冲频率成正比
步进电机的转矩与电流成正比
步进电机的响应速度与驱动电路有关
环境条件
温度:需要考虑电机的工作温度范围,以及环境温度对电机性能的影响
湿度:需要考虑电机的工作湿度范围,以及环境湿度对电机性能的影响
步进电机的特点:精确定位、易于控制、响应速度快
步进电机的应用:广泛应用于自动化设备、机器人、数控机床等领域
步进电机的分类
按照控制方式分类:开环控制、闭环控制、半闭环控制
按照驱动方式分类:直流驱动、交流驱动、混合驱动
按照结构分类:永磁式、混合式、感应式
按照步距角分类:整步、半步、微步、超微步
步进电机的性能参数
感谢您的观看
汇报人:
噪音:步进电机的噪音越小,工作环境越安静
控制方式:选择合适的控制方式,如开环控制、闭环控制等
驱动器:选择合适的驱动器,如直流驱动器、交流驱动器等
步进电机品牌与型号推荐
国际品牌推荐
德国西门子:SINAMICS系列步进电机,性能稳定,质量可靠
美国罗克韦尔:PowerFlex系列步进电机,性能优异,价格适中
步距角:电机每转一圈的步数
效率:电机输出的能量与输入的能量的比值
响应时间:电机从静止到启动的时间
转速:电机每分钟的转数
精度:电机定位的精确度
扭矩:电机输出的力矩
步进电机选型要点
负载特性
负载类型:恒定负载、周期性负载、冲击性负载等
负载大小:根据实际需求选择合适的电机功率
负载频率:根据电机的转速和转矩特性选择合适的负载频率
海拔:需要考虑电机的工作海拔范围,以及海拔对电机性能的影响
步进电机型号参数选择

步进电机型号参数选择步进电机是一种能将数字脉冲信号转换为角位移或直线位移的电机。
它通过控制电流的连续变化实现位置控制,具有精度高、稳定性好、启停速度快等优点。
步进电机在许多领域中广泛应用,包括机械、电子设备、医疗器械等。
本文将介绍几种常见的步进电机型号、参数和选择方法。
一、步进电机型号1.42型步进电机42型步进电机是一种直径为42mm的经典步进电机。
它由两相或四相线圈组成,每一相的线圈可以通过一个电流控制芯片驱动。
42型步进电机具有结构简单、驱动电流小、噪音低等特点,广泛应用于一些小型机械设备中。
2.57型步进电机57型步进电机是一种直径为57mm的步进电机。
它由四相线圈组成,每一相的线圈可以通过一个电流控制芯片驱动。
57型步进电机具有结构稳定、扭矩输出大、运行平稳等特点,广泛应用于一些需要较大扭矩输出的场合。
3.86型步进电机86型步进电机是一种直径为86mm的大功率步进电机。
它由四相线圈组成,每一相的线圈可以通过一个电流控制芯片驱动。
86型步进电机具有功率大、运行平稳等特点,广泛应用于一些需要大功率输出的机械设备。
二、步进电机参数1.步距角:步进电机通常以步距角来描述,它表示每次接收一个脉冲信号时电机转动的角度。
常见的步距角有1.8度型和0.9度型。
1.8度型步进电机每个步距可以转动1.8度,0.9度型步进电机则可以转动0.9度。
2.额定电流:步进电机的额定电流是指电机在正常工作时所需的电流大小。
一般来说,额定电流越大,电机的输出扭矩就越大,但也会产生更多的热量。
3.驱动电压:步进电机的驱动电压是指电机在正常工作时所需的电压大小。
一般来说,驱动电压越高,电机的运行速度就越快,但也会增加驱动电路的复杂度。
4.静态扭矩:步进电机的静态扭矩是指在停止时所能提供的最大转矩。
它通常与步进电机的物理结构和线圈参数有关。
5.转动惯量:步进电机的转动惯量是指电机转动一定角度所需的转动力矩大小。
它通常与电机的转子质量和转子结构有关。
步进电机28BYJ规格书

一、 特点:此产品为28BYJ系列步进电机,小体积、高转速、底振动。
具 有结构紧凑、力矩大、输入功率小、噪音小、 使用方便等特点。
二、 用途:产品广泛用于空调器、电动器械、冷暖通阀门、热水器自动调温系统、自动化仪器、舞台灯光、安防视频监控、及单片机学习开发等领域。
三、 极限参数:表1参数 最小值 最大值 单位 工作温度 1 +60 ℃ 储存温度 -20 +75 ℃四、 技术参数:表2参数 值 参数 值电压VDC 5 空载牵入频率Hz≥500直流电阻25°C Ω±7% 32空载牵出频率Hz≥600步距角 5.625°/64 绝缘耐压V 1S600减速比 1/64 温升 K ≤55 牵入转矩(100Hz时)gf.cm250 噪音 dB ≤40 自定位转矩gf.cm300 驱动方式 四相八拍连接线长:230mm,采用UL 26AWG 1061的电源线五、 外形尺寸:(单位:mm)六:接线示意图接线指示图红5黄3粉红2蓝1橙4七:分配方式八:铭牌13245连线 序号--蓝-黄粉红橙--红导线 颜色231+++-------64+5++分配顺序78++XXXXXXXXX 060000015表示此产品为2006年生产,编号为0000015的产品。
)印刷批号,从0000001开始逐张递增以当年的年份为编码,如2006年,用06表示XX XXXXXXXSTEP MOTOR28BYJ-485V DC。
信浓步进电机STP-43D2035选型及使用说明
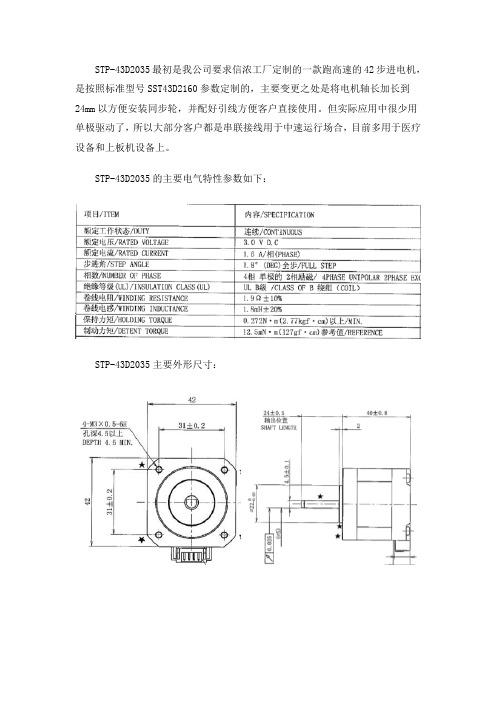
STP-43D2035最初是我公司要求信浓工厂定制的一款跑高速的42步进电机,是按照标准型号SST43D2160参数定制的,主要变更之处是将电机轴长加长到24mm以方便安装同步轮,并配好引线方便客户直接使用。
但实际应用中很少用单极驱动了,所以大部分客户都是串联接线用于中速运行场合,目前多用于医疗设备和上板机设备上。
STP-43D2035的主要电气特性参数如下:STP-43D2035主要外形尺寸:现在很少用户会选用STP-43D2035用于本来设计目的的单极驱动方式,绝大多数用双极驱动,配双极驱动器时在高速运行场合STP-43D2035用半绕组接线,额定电流还是1.6A,步进电机距频图参考SST43D2160。
但如果用于低于300rpm 转速下工作,可以用STP-43D2035串联接线,额度电流变成1.13A,这时候电机距频图可以参考SST43D2085。
综上所述,如果不是用串联接线用于低速运行场合,不太推荐选用STP-43D2035。
STP-43D2035接线图:单极驱动的时候按照上图接线,双极驱动的时候,半绕接线可以不接A-B-,接A,Acom和B,Bcom,串联接线的时候不接Acom,Bcom,接AA-和BB-。
STP-43D2035单极驱动下的距频图和半绕接线可以参考SST43D2160距频图,串联接线参考SST43D2085距频图。
X轴是驱动器不细分情况下的脉冲频率值,这个脉冲频率*0.3=转速,rpm。
如果需要双出轴的,对应型号是STP-43D2035-01,和STP-43D2035是插头式出线不一样,这款双出轴步进电机STP-43D2035-01是引线式出线。
如果工作转速比较高的话,双出轴建议选用比较常用的SST43D2126。
另外,这些双出轴步进电机维科特机电都有配上刹车器的刹车步进电机,需要的话请咨询维科特机电或者浏览公司网站。
配套驱动器推荐选用DM3622,电压范围DC8~36V,电流峰值0.2~2.2A,最大细分128细分,带自检和连续自运行、受控自运行等功能,支持单双脉冲信号,运行噪声低。
两相直流步进电机型号大全及参数
2
g.cm LEAD
kg
mm
Y 09 - 59 D3 - 74 30 - P 1 . 8 3.20 01 .90 68 6. 80 23 . 93 1 16 030 48 Y 09 - 59 D3 - 75 36 - P 1 . 8 3.20 01 .96 60 163..82 26 . 95 13 12 00 48 Y 09 - 59 D3 - 76 55 - P 1 . 8 3.20 01 .9 62 166..84 29 . 92 14 18 00 48
11.5±0.2
1.5 90°
L±1 9±0.3
型号 Y09-59D3-7430-P Y09-59D3-7536-P Y09-59D3-7655-P
马达 长 度( L) 71.1 101.5 132
11.5±0.2
300 φ
4-φ 5
φ73.025±0.025
12.07-0.013
力矩曲线
Y09-59D3-7430-P
4 0.62 46.3 4 0.88 55.8 4 1.4 87.8
驱动器
Y2SD2 Y2SD2 Y2SD2
机 械 尺 寸(单位mm)
□60 4 7 . 1 4±0 . 1
24.5±1 1.6 7
4 7 . 1 4±0 . 1
0
φ38.1 -0.04
0
φ8-0.013
20±0.2 K
K
φ4.5 33
0
0
5
10
15
20
25
SPEED(RPS)
TORQUE(N.m)
Y09-59D3-7655-P
10.8
2 4 V 4 8 V 6 0V 驱 动 器 :Y 2 S D 3 (并 联6 A )
35by48l步进电机规格书
35by48l步进电机规格书
【原创版】
目录
1.步进电机概述
2.35by48l 步进电机的规格参数
3.步进电机的应用领域
4.结论
正文
一、步进电机概述
步进电机是一种电动机,它将电脉冲转换为精确的旋转运动。
这种电机在接收到脉冲信号时,会转动一个固定的步长,从而实现准确的位置控制。
步进电机广泛应用于各种自动化设备、精密仪器以及数控系统等领域。
二、35by48l 步进电机的规格参数
35by48l 是一款常见的步进电机型号,它的规格参数如下:
1.步进电机外形尺寸:35mm×48mm×63mm
2.电机额定电压:DC 24-80V
3.电机额定电流:0.8A-3.5A
4.电机转速:2400rpm
5.电机力矩:0.8Nm-8Nm
6.步进角:0.36°/step
7.耐热性能:80℃
三、步进电机的应用领域
步进电机在许多领域都有广泛的应用,如:
1.数控机床:步进电机用于驱动数控机床的各个轴,实现高精度的加工。
2.机器人:步进电机用于驱动机器人的关节,使机器人能准确地完成各种动作。
3.仪器仪表:步进电机用于驱动各种仪器仪表,实现精确的测量和控制。
4.自动化设备:步进电机用于驱动自动化设备的各个部件,实现高效率的生产。
四、结论
35by48l 步进电机作为一款常用的步进电机,具有良好的性能和广泛的应用领域。
步进电机型号及参数

步进电机型号及参数1. 引言步进电机是一种常见的电机类型,常用于需要精确运动控制的设备中,如3D打印机、CNC机床等。
本文将介绍步进电机的常见型号及其参数。
了解步进电机的型号和参数对于选择合适的电机非常重要。
2. 型号分类步进电机有多种不同的型号,按照外形、尺寸和电气特性等方面可以进行分类。
常见的步进电机型号包括以下几种:2.1 2相步进电机2相步进电机是最常见的步进电机类型之一。
它包括4个线圈,每个线圈可以由驱动器单独控制,可以实现更精确的旋转控制。
2相步进电机的精度和控制性很高,但相对较贵。
2.2 5相步进电机5相步进电机是一种特殊的步进电机,它包括5个线圈。
相比于2相步进电机,5相步进电机具有更高的分辨率和更平滑的运动。
由于多个线圈的控制,5相步进电机通常可以更准确地定位。
2.3 3D打印机专用步进电机3D打印机专用步进电机一般是为了满足3D打印机高速、高精度的运动要求而设计的。
这些电机通常具有较低的噪音和振动。
常见的型号包括NEMA 17和NEMA 23等。
3. 参数介绍无论是哪种型号的步进电机,都具有一些常见的参数,下面将介绍一些常见的步进电机参数:3.1 步角步角是步进电机旋转一步所需的角度。
通常,步进电机的步角为1.8度,也有一些特殊的步进电机具有0.9度的步角。
步角越小,电机的分辨率越高。
3.2 额定电压和电流额定电压和电流是步进电机正常工作时的电压和电流。
选择适当的额定电压和电流可以保证步进电机的正常运行和寿命。
3.3 扭矩扭矩是步进电机输出的力矩大小。
通常,步进电机的扭矩与电流成正比,但也受到一些其他因素的影响,如电机的设计和进一步细分等。
3.4 驱动方式步进电机的驱动方式包括全步进驱动和细分驱动。
全步进驱动是最常见的驱动方式,它将电流以全功率施加到单个线圈上,能够提供最大的扭矩。
细分驱动将输入电流细分为更小的步进,能够提供更平滑、精确的运动。
4. 总结本文介绍了步进电机的常见型号及其参数。
步进电机28BYJ规格书
一、特点:
此产品为28BYJ系列步进电机,小体积、高转速、底振动。
具有结构紧凑、力矩大、输入功率小、噪音小、使用方便等特点。
二、用途:
产品广泛用于空调器、电动器械、冷暖通阀门、热水器自动调温系统、自动化仪器、舞台灯光、安防视频监控、及单片机学习开发等领域。
三、极限参数:
表1
四、技术参数:
表2
五、 外形尺寸:(单位:mm)
六:接线示意图
接线指示图红5
黄3粉红2
蓝1
橙4
七:分配方式
八:铭牌
1
3245连线 序号--蓝
-
黄粉红橙--红导线 颜色231+++-------64+5++分配顺序
78+
+XXXXXXXXX 060000015表示此产品为2006年生产,编号为0000015
的产品。
)
印刷批号,从0000001开始逐张递增
以当年的年份为编码,如2006年,用06表示XX XXXXXXX
STEP MOTOR
28BYJ-48
5V DC。
步进电机选型的步骤及如何选择步进电机
步进电机选型的步骤及如何选择步进电机步进电机是一种将电脉冲信号转换为角位移或线位移的电机,广泛应用于自动化设备、工业控制、数控机床、机器人等领域。
在选择步进电机时,需要经过以下几个步骤:1.确定应用需求:首先需要明确步进电机的使用环境和应用需求,包括所需的转矩、转速、精度、运动模式(单步运动、连续运动)等。
2.计算负载特性:根据应用需求,计算出步进电机所需的负载特性,包括转矩、惯性、负载惯性比等。
这些参数将决定所选步进电机的能力是否足够满足应用需求。
3.选择电机类型:根据应用要求和负载特性,选择合适的步进电机类型。
常见的步进电机类型包括永磁步进电机、混合式步进电机和开环步进电机等。
4.计算步进电机参数:根据应用需求和负载特性,计算出所选步进电机的一些重要参数,包括步距角、步进角精度、电感、电阻、静态转矩、最大转速等。
5.进行性能匹配:根据计算得到的参数,与实际的步进电机参数进行比较,进行性能匹配。
确保所选步进电机的性能能够满足应用需求,如转矩能力是否足够、转速是否达到要求、步进角精度能否满足应用要求等。
6.考虑成本和可靠性:根据所选步进电机的性能和价格,进行成本和可靠性的评估。
确定所选步进电机的成本是否符合预算,以及其可靠性是否能够满足应用需求。
7.选择品牌和供应商:根据步进电机的技术特性和价格,选择合适的品牌和供应商进行购买。
选择有良好信誉和服务的供应商,确保步进电机的质量和售后服务。
在选择步进电机时,还需要考虑一些其他因素,如工作环境(温度、湿度等)、安装尺寸、工作噪音、功率和电源要求等。
通过综合考虑这些因素,选择合适的步进电机,才能确保其能够满足应用需求并具有较好的性能和可靠性。
步进电机型号及参数大全
步进电机型号及参数大全步进电机简介步进电机是一种将电脉冲转化为角位移的执行机构。
当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”),它的旋转是以固定的角度一步一步运行的。
可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
步进电机可以作为一种控制用的特种电机,利用其没有积累误差(精度为100%)的特点,广泛应用于各种开环控制。
步进电机的分类可变磁阻式(VR型):转子以软铁加工成齿状,当定子线圈不加激磁电压时,保持转矩为零,故其转子惯性小、响应性佳,但其容许负荷惯性并不大。
其步进角通常为15°永久磁铁式(PM型):转子由永久磁铁构成,其磁化方向为辐向磁化,无激磁时有保持转矩。
依转子材质区分,其步进角有45°、90°及7.5°、11.25°、15°、18°等几种。
混和式(HB型):转子由轴向磁化的磁铁制成,磁极做成复极的形式,其乃兼采可变磁阻式步进电机及永久磁铁式步进电机的优点,精确度高、转矩大、步进角度小。
步进电机型号1、步进电机到底有多少型号?答:28.42.57.86.110.130.2、这些数字是代表电机尺寸大小吗?答:这些型号根据电机的底座的直径来命名的。
3、除了BYG还有哪些英文型号,分别代表什么意思?答:现在用的比较多的都是混合式步进电机了。
而且现在这种东西已经国产化了。
各个厂家的命名又有所不同。
所以不能给你提供更好的解释。
步进电机的基本参数1、电机固有步距角。
有刷直流步进电机参数与型号

有刷直流步进电机是一种应用广泛的驱动电机,通常和齿轮箱一起使用,可以达到减速、调速的功能,输出功率在50W以内,电压在24V内,直径规格在38mm,输出转速、减速比、输出扭矩,传动精度,传动噪音等参数是定制开发而成;下面详细介绍有刷直流步进电机参数、性能、应用等信息。
产品名称:16mm有刷直流电机电机产品分类:有刷减速电机驱动电机:直流步进电机产品型号:ZWMD016017产品规格:Φ16MM减速齿轮箱电压:5V-24V(可定制)产品电流:80-500mA(可定制)减速比:64-216(可定制)输出转速:10-1000 r/min(可定制)输出轴形状:D形轴、圆形轴、双扁形轴、六边形轴、五边形轴、四方轴;性能特点:传动精度、寿命长、齿轮耐用、噪音低。
16mm直流有刷减速电机应用:自动机械传动、广告旋转传动、银行提款机、汽车驱动器、智能家居、机器人传动等。
产品名称:8mm有刷直流步进减速电机产品分类:有刷减速电机产品型号:ZWMD008008产品规格:Φ8MM产品电压:4.2V空载转速:19-1228rpm(可定制)空载电流:95-100mA (可定制)负载转速:15-935rpm(可定制)负载电流:155-160mA (可定制)速比:13-809.1(可定制)齿轮箱类型:行星齿轮箱传动轴:金属传动轴输出轴形状:D形轴、圆形轴、双扁形轴、六边形轴、五边形轴、四方轴;性能特点:体积小、噪音低、寿命长、传动精度高。
8mm有刷减速电机应用:眉笔、照相机、机器人等。
产品应用:有刷直流步进电机广泛应用在智能家居、智能汽车、智能通讯设备、智能医疗设备、智慧物流、电子消费产品、个人护理工具、办公设备、智能机器人、自动工业化。
有刷直流步进电机定制参数范围:尺寸规格系列:3.4mm、4mm、6mm、8mm、10mm、12mm、16mm、18mm、20mm、22mm、24mm、28mm、32mm、38mm;材质系列:塑胶行星齿轮箱、金属行星齿轮箱输出力矩范围:1gf-cm至50kg-cm;减速比范围:5-1500;输出转速范围:5-2000rpm;生产厂家主要产品有:1、全系列精密行星齿轮箱减速电机,直径3.4mm-38mm,功率:0.01-40W,输出转速5-2000rpm,减速比5-1500,输出扭矩1gf.cm到50Kgf.cm;2、通用驱动器、调节器齿轮箱传动机构系统;3、定制化精密齿轮、蜗轮、蜗杆传动机构系统;4、精密、微小的塑胶和特殊金属粉末注塑零件及集成装配组件。
步进电机的选型和计算方法.(DOC)

1、步进电机的选用计算方法步进电机是一种将电脉冲转化为角位移的执行机构。
通俗一点讲:当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(及步进角)。
您可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时您可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
步进电机是机电一体化产品中关键部件之一,通常被用作定位控制和定速控制。
步进电机惯量低、定位精度高、无累积误差、控制简单等特点,广泛应用于机电一体化产品中,如:数控机床、包装机械、计算机外围设备、复印机、传真机等。
选择步进电机时,首先要保证步进电机的输出功率大于负载所需的功率。
而在选用功率步进电机时,首先要计算机械系统的负载转矩,电机的矩频特性能满足机械负载并有一定的余量保证其运行可靠。
在实际工作过程中,各种频率下的负载力矩必须在矩频特性曲线的范围内。
一般地说最大静力矩Mjmax大的电机,负载力矩大。
选择步进电机时,应使步距角和机械系统匹配,这样可以得到机床所需的脉冲当量。
在机械传动过程中为了使得有更小的脉冲当量,一是可以改变丝杆的导程,二是可以通过步进电机的细分驱动来完成。
但细分只能改变其分辨率,不改变其精度。
精度是由电机的固有特性所决定。
选择功率步进电机时,应当估算机械负载的负载惯量和机床要求的启动频率,使之与步进电机的惯性频率特性相匹配还有一定的余量,使之最高速连续工作频率能满足机床快速移动的需要。
选择步进电机需要进行以下计算:(1)计算齿轮的减速比根据所要求脉冲当量,齿轮减速比i计算如下:i=(φ.S)/(360.Δ) (1-1) 式中φ -步进电机的步距角(o/脉冲) S -丝杆螺距(mm) Δ-(mm/脉冲)(2)计算工作台,丝杆以及齿轮折算至电机轴上的惯量Jt。
Jt=J1+(1/i2)[(J2+Js)+W/g(S/2π)2] (1-2)式中Jt-折算至电机轴上的惯量(Kg.cm.s2)J1、J2 -齿轮惯量(Kg.cm.s2) Js -丝杆惯量(Kg.cm.s2) W-工作台重量(N)S-丝杆螺距(cm)(3)计算电机输出的总力矩MM=Ma+Mf+Mt (1-3)Ma=(Jm+Jt).n/T×1.02×10ˉ2 (1-4)式中Ma -电机启动加速力矩(N.m) Jm、Jt-电机自身惯量与负载惯量(Kg.cm.s2) n-电机所需达到的转速(r/min)T---电机升速时间(s)Mf=(u.W.s)/(2πηi)×10ˉ2 (1-5)Mf-导轨摩擦折算至电机的转矩(N.m) u-摩擦系数η-传递效率Mt=(Pt.s)/(2πηi)×10ˉ2 (1-6)Mt-切削力折算至电机力矩(N.m) Pt-最大切削力(N)(4)负载起动频率估算。
电机选型及参数
步进电机是一种能将数字输入脉冲转换成旋转或直线增量运动的电磁执行元件。
每输入一个脉冲电机转轴步进一个步距角增量。
电机总的回转角与输入脉冲数成正比例,相应的转速取决于输入脉冲频率。
步进电机是机电一体化产品中关键部件之一,通常被用作定位控制和定速控制。
步进电机惯量低、定位精度高、无累积误差、控制简单等特点。
广泛应用于机电一体化产品中,如:数控机床、包装机械、计算机外围设备、复印机、传真机等。
选择步进电机时,首先要保证步进电机的输出功率大于负载所需的功率。
而在选用功率步进电机时,首先要计算机械系统的负载转矩,电机的矩频特性能满足机械负载并有一定的余量保证其运行可靠。
在实际工作过程中,各种频率下的负载力矩必须在矩频特性曲线的范围内。
一般地说最大静力矩Mjmax大的电机,负载力矩大。
选择步进电机时,应使步距角和机械系统匹配,这样可以得到机床所需的脉冲当量。
在机械传动过程中为了使得有更小的脉冲当量,一是可以改变丝杆的导程,二是可以通过步进电机的细分驱动来完成。
但细分只能改变其分辨率,不改变其精度。
精度是由电机的固有特性所决定。
论文天地欢迎您选择功率步进电机时,应当估算机械负载的负载惯量和机床要求的启动频率,使之与步进电机的惯性频率特性相匹配还有一定的余量,使之最高速连续工作频率能满足机床快速移动的需要。
选择步进电机需要进行以下计算:(1)计算齿轮的减速比根据所要求脉冲当量,齿轮减速比i计算如下:i=(φ.S)/(360.Δ) (1-1)式中φ---步进电机的步距角(o/脉冲)S ---丝杆螺距(mm)Δ---(mm/脉冲)(2)计算工作台,丝杆以及齿轮折算至电机轴上的惯量Jt。
Jt=J1+(1/i2)[(J2+Js)+W/g(S/2π)2] (1-2)式中Jt ---折算至电机轴上的惯量(Kg.cm.s2)J1、J2 ---齿轮惯量(Kg.cm.s2)Js ----丝杆惯量(Kg.cm.s2) W---工作台重量(N)S ---丝杆螺距(cm)(3)计算电机输出的总力矩MM=Ma+Mf+Mt (1-3)Ma=(Jm+Jt).n/T× 1.02×10ˉ 2 (1-4)式中Ma ---电机启动加速力矩(N.m)Jm、Jt---电机自身惯量与负载惯量(Kg.cm.s2)n---电机所需达到的转速(r/min)T---电机升速时间(s)Mf=(u.W.s)/(2πηi)×10ˉ 2 (1-5)Mf---导轨摩擦折算至电机的转矩(N.m)u---摩擦系数η---传递效率Mt=(Pt.s)/(2πηi)×10ˉ 2 (1-6)Mt---切削力折算至电机力矩(N.m)Pt---最大切削力(N)(4)负载起动频率估算。
电机选型及参数

步进电机是一种能将数字输入脉冲转换成旋转或直线增量运动的电磁执行元件。
每输入一个脉冲电机转轴步进一个步距角增量。
电机总的回转角与输入脉冲数成正比例,相应的转速取决于输入脉冲频率。
步进电机是机电一体化产品中关键部件之一,通常被用作定位控制和定速控制。
步进电机惯量低、定位精度高、无累积误差、控制简单等特点。
广泛应用于机电一体化产品中,如:数控机床、包装机械、计算机外围设备、复印机、传真机等。
选择步进电机时,首先要保证步进电机的输出功率大于负载所需的功率。
而在选用功率步进电机时,首先要计算机械系统的负载转矩,电机的矩频特性能满足机械负载并有一定的余量保证其运行可靠。
在实际工作过程中,各种频率下的负载力矩必须在矩频特性曲线的范围内。
一般地说最大静力矩Mjmax大的电机,负载力矩大。
选择步进电机时,应使步距角和机械系统匹配,这样可以得到机床所需的脉冲当量。
在机械传动过程中为了使得有更小的脉冲当量,一是可以改变丝杆的导程,二是可以通过步进电机的细分驱动来完成。
但细分只能改变其分辨率,不改变其精度。
精度是由电机的固有特性所决定。
论文天地欢迎您选择功率步进电机时,应当估算机械负载的负载惯量和机床要求的启动频率,使之与步进电机的惯性频率特性相匹配还有一定的余量,使之最高速连续工作频率能满足机床快速移动的需要。
选择步进电机需要进行以下计算:(1)计算齿轮的减速比根据所要求脉冲当量,齿轮减速比i计算如下:i=(φ.S)/(360.Δ) (1-1)式中φ---步进电机的步距角(o/脉冲)S ---丝杆螺距(mm)Δ---(mm/脉冲)(2)计算工作台,丝杆以及齿轮折算至电机轴上的惯量Jt。
Jt=J1+(1/i2)[(J2+Js)+W/g(S/2π)2] (1-2)式中Jt ---折算至电机轴上的惯量(Kg.cm.s2)J1、J2 ---齿轮惯量(Kg.cm.s2)Js ----丝杆惯量(Kg.cm.s2) W---工作台重量(N)S ---丝杆螺距(cm)(3)计算电机输出的总力矩MM=Ma+Mf+Mt (1-3)Ma=(Jm+Jt).n/T× 1.02×10ˉ 2 (1-4)式中Ma ---电机启动加速力矩(N.m)Jm、Jt---电机自身惯量与负载惯量(Kg.cm.s2)n---电机所需达到的转速(r/min)T---电机升速时间(s)Mf=(u.W.s)/(2πηi)×10ˉ 2 (1-5)Mf---导轨摩擦折算至电机的转矩(N.m)u---摩擦系数η---传递效率Mt=(Pt.s)/(2πηi)×10ˉ 2 (1-6)Mt---切削力折算至电机力矩(N.m)Pt---最大切削力(N)(4)负载起动频率估算。
常用步进电机型号及参数大全
◆ 湿度范围:20%RH-90%RH特点◆ RoHS 符合品◆ 绝缘耐压:500V AC /1分钟◆ 马达表面最高承受温度:100℃◆ 轴向容许负载:20N◆ 径向容许负载:90N(距安装面15mm)◆ 匹配驱动器:Y2SD2◆ 绝缘电阻:100MΩ◆ 法兰尺寸:□60mm◆ 安装孔距:47.14mm◆ 角度误差:±0.09°规格型号步距角电流deg A/PHASE Ω/PHASE 电阻电感mH/PHASE 保持力矩 N.m 转子惯量引线数量LEAD 质量kg 马达长度mm机械尺寸(单位mm )2g.cm 驱动器A+A-B+B-棕橙红黄01020304000.20.40.60.81.01.2SPEED(RPS)T O R Q U E (N .m )5024V 36V 48V 驱动器:Y2SD2标配连接线:长度300min力矩曲线0510152000.51.01.52.02.53.0SPEED(RPS)T O R Q U E (N .m )2524V 36V 48V 驱动器:Y2SD2接线图010********.30.60.91.21.51.8SPEED(RPS)T O R Q U E (N .m )5024V 36V 48V 驱动器:Y2SD2Y09-59D3-1305-PY09-59D3-3305-P Y09-59D3-5001-P0.61.2 1.81.22.43.61.83.6 5.42.44.87.23.06.09.03.67.210.8SPEED(RPS)SPEED(RPS)SPEED(RPS)24V 24V 24V 48V 48V 48V 60V 60V 60V 驱动器:Y2SD3(并联6A)驱动器:Y2SD3(并联6A)驱动器:Y2SD3(并联6A)◆ 湿度范围:20%RH-90%RH◆ 绝缘耐压:1500V AC /1分钟◆ RoHS 符合品◆ 法兰尺寸:□86mm◆ 马达表面最高承受温度:100℃◆ 轴向容许负载:60N特点◆ 角度误差:±0.09°◆ 绝缘电阻:100MΩ◆ 径向容许负载:320N(距安装面20mm)◆ 匹配驱动器:Y2SD3 or Y2SA2规格型号步距角电流deg A/PHASE Ω/PHASE 电阻电感mH/PHASE 保持力矩 N.m 转子惯量引线数量LEAD 质量kg 马达长度mm机械尺寸(单位mm )2g.cm 驱动器力矩曲线000555101010151515202020000T T T O O O R R R Q Q Q U U U E E E (((N N N ...m m m )))252525并联直流驱动型号步距角电流deg A/PHASE Ω/PHASE 电阻电感mH/PHASE 保持力矩 N.m 转子惯量引线数量LEAD 质量kg 马达长度mm2g.cm 驱动器串联交流驱动Y09-59D3-7430-PY09-59D3-7536-P Y09-59D3-7655-P102030400.61.2 1.81.22.43.61.83.6 5.42.44.87.23.06.09.03.67.210.8SPEED(RPS)SPEED(RPS)SPEED(RPS)50驱动器:Y2SA2(220VAC,串联3A)驱动器:Y2SA2(220VAC ,串联3A)驱动器:Y2SA2(220VAC ,串联3A)00055101015152020000T T T OO O RR R QQ Q U U U EE E (((NN N ...mm m )))2525接线图A+A-A+A-B+B-黑绿红蓝黄橙白棕并联接线串联接线Y09-59D3-7430-P Y09-59D3-7536-P Y09-59D3-7655-P。
步进电机型号、参数、选择

一、步进电动机简介
1. 步进电动机的历史 2. 步进电动机的定义
3. 4. 5. 6. 7.
步进电动机的工作原理 步进电动机的机座号 步进电动机构造 步进电动机主要参数 步进电动机的特点
一、步进电动机简介
1. 步进电动机的历史:德国百格拉公司于1973年发明了五相混 合式步进电机及其驱动器;1993年又推出了性能更加优越的三相 混合式步进电机。我国在80年代以前,一直是反应式步进电机占 统治地位,混合式步进电机是80年代后期才开始发展。 2. 步进电动机的定义:是一种专门用于速度和位置精确控制的 特种电机,它旋转是以固定的角度(称为步距角)一步一步运行 的,故称步进电机。 3. 步进电动机的工作原理 以单极性电机为例来解释 工作原理
4. 步进电动机的机座号:主要有35、39、42、57、86、110等 5. 步进电动机构造:由转子(转子铁芯、永磁体、转轴、滚珠 轴承),定子(绕组、定子铁芯),前后端盖等组成。最典型两相 混合式步进电机的定子有8个大齿,40个小齿,转子有50个小齿; 三相电机的定子有9个大齿,45个小齿,转子有50个小齿。
2. 电机定位精度的选择
机械传动比确定后,可根据控制系统的定位精度选择步进电机 的步距角及驱动器的细分等级。一般选电机的一个步距角对应 于系统定位精度的1/2 或更小。 注意:当细分等级大于1/4后,步距角的精度不能保证。 伺服电机编码器的分辨率选择:分辨率要比定位精度高一个数量 级。
3. 电机力矩选择 步进电机的动态力矩一下子很难确定,我们往往先确定电机的静 力矩。静力矩选择的依据是电机工作的负载,而负载可分为惯 性负载和摩擦负载二种。直接起动时(一般由低速)时二种负 载均要考虑,加速起动时主要考虑惯性负载,恒速运行进只要 考虑摩擦负载。一般情况下,静力矩应为摩擦负载的2-3倍内好, 静力矩一旦选定,电机的机座及长度便能确定下来(几何尺寸) • 转动惯量计算
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
步进电机是一种能将数字输入脉冲转换成旋转或直线增量运动的电磁执行元件。
每输入一个脉冲电机转轴步进一个步距角增量。
电机总的回转角与输入脉冲数成正比例,相应的转速取决于输入脉冲频率。
步进电机是机电一体化产品中关键部件之一,通常被用作定位控制和定速控制。
步进电机惯量低、定位精度高、无累积误差、控制简单等特点。
广泛应用于机电一体化产品中,如:数控机床、包装机械、计算机外围设备、复印机、传真机等。
选择步进电机时,首先要保证步进电机的输出功率大于负载所需的功率。
而在选用功率步进电机时,首先要计算机械系统的负载转矩,电机的矩频特性能满足机械负载并有一定的余量保证其运行可靠。
在实际工作过程中,各种频率下的负载力矩必须在矩频特性曲线的范围内。
一般地说最大静力矩Mjmax大的电机,负载力矩大。
选择步进电机时,应使步距角和机械系统匹配,这样可以得到机床所需的脉冲当量。
在机械传动过程中为了使得有更小的脉冲当量,一是可以改变丝杆的导程,二是可以通过步进电机的细分驱动来完成。
但细分只能改变其分辨率,不改变其精度。
精度是由电机的固有特性所决定。
论文天地欢迎您选择功率步进电机时,应当估算机械负载的负载惯量和机床要求的启动频率,使之与步进电机的惯性频率特性相匹配还有一定的余量,使之最高速连续工作频率能满足机床快速移动的需要。
选择步进电机需要进行以下计算:(1)计算齿轮的减速比根据所要求脉冲当量,齿轮减速比i计算如下:i=(φ.S)/(360.Δ) (1-1)式中φ---步进电机的步距角(o/脉冲)S ---丝杆螺距(mm)Δ---(mm/脉冲)(2)计算工作台,丝杆以及齿轮折算至电机轴上的惯量Jt。
Jt=J1+(1/i2)[(J2+Js)+W/g(S/2π)2] (1-2)式中Jt ---折算至电机轴上的惯量(Kg.cm.s2)J1、J2 ---齿轮惯量(Kg.cm.s2)Js ----丝杆惯量(Kg.cm.s2) W---工作台重量(N)S ---丝杆螺距(cm)(3)计算电机输出的总力矩MM=Ma+Mf+Mt (1-3)Ma=(Jm+Jt).n/T× 1.02×10ˉ 2 (1-4)式中Ma ---电机启动加速力矩(N.m)Jm、Jt---电机自身惯量与负载惯量(Kg.cm.s2)n---电机所需达到的转速(r/min)T---电机升速时间(s)Mf=(u.W.s)/(2πηi)×10ˉ 2 (1-5)Mf---导轨摩擦折算至电机的转矩(N.m)u---摩擦系数η---传递效率Mt=(Pt.s)/(2πηi)×10ˉ 2 (1-6)Mt---切削力折算至电机力矩(N.m)Pt---最大切削力(N)(4)负载起动频率估算。
数控系统控制电机的启动频率与负载转矩和惯量有很大关系,其估算公式为fq=fq0[(1-(Mf+Mt))/Ml)÷(1+Jt/Jm)] 1/2(1-7)式中fq---带载起动频率(Hz)fq0---空载起动频率Ml---起动频率下由矩频特性决定的电机输出力矩(N.m)若负载参数无法精确确定,则可按fq=1/2fq0进行估算.(5)运行的最高频率与升速时间的计算。
由于电机的输出力矩随着频率的升高而下降,因此在最高频率时,由矩频特性的输出力矩应能驱动负载,并留有足够的余量。
(6)负载力矩和最大静力矩Mmax。
负载力矩可按式(1-5)和式(1-6)计算,电机在最大进给速度时,由矩频特性决定的电机输出力矩要大于Mf与Mt 之和,并留有余量。
一般来说,Mf与Mt之和应小于(0.2 ~0.4)Mmax.电机型号、参数、尺寸Y系列三相异步电动机是一般用途鼠笼型异步电动机基本系列,全国统一设计。
它的中心高、功率等级、安装尺寸均符合IEC国际电工委员会标准。
产品可以和国内外各类机械设备配套。
Y系列电机中心高80-355mm。
绝缘等级为B级,外壳防护等级IP44,冷却方式IC411。
基本安装方式有IMB3、IMB5、IMB35、V1、V3等。
工作方式:S1连续工作制,环境温度-15— +40℃,海拔1000米以下。
电压380V,频率50HZ。
接法:3KW及以下为Y接,4KW及以上为△接。
Y系列电机具有效率高,能耗少、噪声低、振动小、重量轻、体积小、性能优良,运行可靠,维护方便等优点。
广泛用于工业、农业、建筑、采矿行业的各种无特殊要求的机械设备。
如风机、水泵、机床、起重及农副产品加工机械等。
B35尺寸数据机座号凸缘号极数机座轴伸凸圆端盖ABACADHDL AA/2B C H K D E F G M N P R S T孔数Y8FF165 2.412562.51581194615.5165132123.541651751517529Y90S2.4.6 147569245821819516195315Y9 0L 12534Y100LFF215 1680 146310 12286242151825154252151824538Y1 12 M 1995711224524192654电机型号:1、Y、Y2 、YPT、YB、系列小电机;机座号:Y80-355、380V IP442、YZ、YZR系列起重及冶金用电机;机座号:132-355、IP44、IP54 380V3、JS、JR、JR2等、机座号:11#-15# 380V、6KV 、10KV电机4、Y、YR YKK、YRKK、机座号355-800、380V、60KV 10KV等各型大中型高低电机。
5、Z2、Z3、Z4、ZZJ、ZZY、ZYZ、及派生系列直流电机6、SF、SFW、TF、ZYS等发电机。
Y系列全程为全封闭自扇冷式三相鼠笼型异步电动机。
使用非常普遍YS系列三相异步电动机功率较小,适用于小型机床、泵、压缩机的驱动,接线盒均在电动机顶部。
YSF、YT系列区别不大,都是风机专用三相异步电动机,是根据风机行业的配套要求,电动机在结构上采取了一系列的降噪、减振措施。
该系列电机具有高效节能、噪声低,启动性能好,运行可靠,使用安装方便等特点。
适用于风机安装和使用,是风机的理想配套产品。
admin@YD为多速三相异步电动机,一般有4/2极8/6极8/4/2极6/4极12/6极8/6/4极8/4极6/4/2极12/8/6/4极YL系列为双值电容单相异步电动机,也就是有两个电容YC系列为单相电容起动异步电动机YY系列为单相电容运转异步电动电机型号里的Y、YS、YSF、YT、YD、YL、YC分别是什么意思?SG系列为高防护等级三相异步电动机,可与Y系列互换,但性能均有所加强(如电磁方案的调整优化,部分规格采用冷轧硅钢片等),使该系列电机的振动和噪音(特别是负载噪音)明显低于Y系列电机。
实验证明该系列电机的噪音达到I级标准,电机的振动值比Y系列标准低1个优先级。
轴伸端轴承增加了注油装置,不需拆卸电机就可对轴承进行换油,维护简单。
YCT系列为电磁调速电动机,是改变励磁电流大小的方法来调节输出轴力矩和转速的一种调速电机。
它可应用于恒转矩负载的速度调节和张力控制的场合,更适合于鼓风机和泵类负载的场合。
对于起动力矩高、惯性大的负载有缓冲起动的作用,同时有防止过载等保护作用。
YP2系列为变频调速三相异步电动机,是以变频器为供电电源的变频调速三相异步电动机。
通过改变电源频率实现平滑地调节电动机的转速,达到节能和控制自动化的目的。
YP2系列电动机效率高,调速范围广,精度高,运行稳定,操作和维修方便,其安装尺寸符合国际电工委员会(IEC)标准,分为自扇冷却和外置风扇冷却两种。
CXT系列为稀土永磁三相同步电动机,采用新型稀土永磁材料及其它优质材料制造,在转子结构设计和电磁参数选定方面有较大创新,使电机具有超高效率、功率因数的同时(功率因数达到95%以上),因而具有较高的起动性能、较高的牵入同步转矩和较大的过载能力,并且电机效率曲线比较平直,低负荷时也具有很高的效率,能够广泛应用于石油、化工、冶金、矿山、纺织等长期负荷运行的设备。
YLZC系列为冷却塔专用电机,电机外壳防护等级为IP45(或IP55),该系列电机在结构上采取—系列的降噪、减振、防水、防潮措施,具有噪音低、效率高、防水、防潮等有点。
YZS系列为注塑机专用电机,它除具有Y系列电机基本特性外,还具有过载能力强,噪声低,尤其是额定负载和超载时噪声低的特点。
YXF系列为高温消防排烟风机专用电机,电机外壳与烟气完全隔离,内置独立的冷却通路,具有连续输送300C°高温烟气30MIN的超凡能力直流电机维修检测设备,F级和H级真空压力浸漆装置,电机故障分析机,伏高压耐压台;5/10吨行车吊机;高低压电机空载试验站;直流电机试验台及测振仪、红外线测温仪、测速仪、形双臂电桥等检测仪器仪表。
阅读全文类别:默认分类查看评论关于印发《〈第一批实施强制性产品认证的产品目录〉中部分产品详细适用范围》的通知国认证[2003]46号各省、自治区、直辖市及计划单列市、新疆生产建设兵团质量技术监督局,各直属出入境检验检疫局:为便于强制性产品认证的行政执法检查工作,我委对《〈第一批实施强制性产品认证的产品目录〉中产品的适用范围》(国家质检总局、国家认监委2002年联合公告第60号)中的低压电器、电线电缆、电路开关保护或连接用电器装置、小功率电动机等产品的适用范围做了补充说明(见附件)。
现印发给你们,请遵照执行。
附件:《第一批实施强制性产品认证的产品目录》中部分产品详细适用范围二○○三年八月十二日(注:素材和资料部分来自网络,供参考。
请预览后才下载,期待你的好评与关注!)。