最速下降法.
最优化方法第二章_线搜索算法_最速下降法
f x1 , x2 c, c>0,
2
改写为:
x12 2c 1
2 x2
2c 2
2
1
二、最速下降法
x2
这是以
2c
1
和
2c
2
为半轴的椭圆
2c
2c
2
2
从下面的分析可见 两个特征值的相对
x1
大小决定最速下降法的收敛性。
(1)当 1 2 时,等值线变为圆
2 2
4 f x , 2
2 x1 2 x2 4 f ( x) , 2 x1 +4x2
4 d = f x , 2
0 0
=40 2 20 3 令 0= ' ( ) 80 20, 得 0 =1/4,
一
一维搜索
二 三 四
下 降 算 法
五
最速下降法 Newton法 共轭梯度法
多尺度法 (拟Newton法)
二、最速下降法 假设 f 连续可微,取 线搜索方向
k
d f ( x )
k
步长k 由精确一维搜索得到。 从而得到第 k+1次迭代点,即
f ( x k k d k ) min f ( x k d k )
(推论)在收敛定理的假设下,若f (x)为凸函数,则最速下降 法或在有限迭代步后达到最小点;或得到点列 x k ,它的任 何聚点都是 f (x)的全局最小点。
二、最速下降法
最速下降法特征:相邻两次迭代的方向互相垂直。
令
( ) f ( x d ), 利用精确一维搜索,可得
最速下降法

最速下降法姓名:沈东东 班级:研1404 学号:1415033005一、最速下降法的原理目标函数:(1)n f R R n →>在决策变量的当前点()k n x R ∈处的一阶Taylor 展开式为()()()()()()()k k k T f x f x g x δδοδ+=++式中,()()k n g x R ∈为f 在点()k x 处的梯度向量。
当扰动量n R δ∈充分小时,有()()()()()()k k k T f x f x g x δδ+≈+设新的迭代点为(1)()k k x x δ+=+,于是得到(1)()()()()()k k k T f x f x g x δ+-≈为了使(1)k x +处的目标函数值比()k x 处有所下降,需要满足()()0k T g x δ<此外,梯度向量()()k g x 和扰动量δ的内积可以表示为()()()()cos k T k g x g x δδθ=式中,θ为两向量之间的夹角。
若要使目标函数值的下降量尽可能大,可知δ的方向应该为梯度方向的负方向,即cos 1θ=-。
函数f 在点()k x 处的负梯度方向称为该点的最速下降方向。
在每次迭代时都取最速下降方向作为搜索方向的方法就称为最速下降法。
二、最速下降法的特点1.若()k x 不是极小点,则f 在点()k x 处的最速下降方向总是下降方向。
2.如果每次迭代时都用精确搜索方法得到最佳步长作为搜索步长,则寻优过程中相邻的最速下降方向是正交的。
3最速下降法产生的迭代点序列在一定条件下是线性收敛的,其收敛性质与极小点*x 处的Hesse 矩阵有关。
三、最速下降法的计算步骤最速下降法的计算步骤如下:步骤1:已知待求问题的目标函数()f x ,选择初始点(0)x ,并设定精度要求tol ,令:0k =。
步骤2:计算()f x 在点()k x 处的梯度向量()()k g x ,得到最速下降方向()()()k k d g x =-。
最速下降法解题步骤

最速下降法(Steepest Descent Method)是一种数值优化算法,用于求解无约束优化问题的最小值。
下面是最速下降法的一般解题步骤:
1.定义目标函数:首先,需要明确要优化的目标函数。
这个函数通常表示为f(x),其中
x 是优化变量。
2.初始化起始点:选择一个合适的起始点x0,作为最速下降法的初始点。
3.计算梯度:计算目标函数在当前点的梯度,即∇f(x)。
这可以通过对目标函数进行偏
导数计算得到。
4.确定搜索方向:将梯度反向取负作为搜索方向d,即d = -∇f(x)。
5.确定步长:确定沿着搜索方向移动的步长,也称为学习率或步长因子。
常见的选择
方法有固定步长、线性搜索和精确线搜索等。
6.更新当前点:根据步长和搜索方向,更新当前点x,即x = x + αd,其中α 表示步
长。
7.判断终止条件:判断是否满足终止条件,可以是达到预定的迭代次数、目标函数值
变化很小或梯度变化很小等。
8.若不满足终止条件,则返回第3步,重新计算梯度,并重复3-7步骤,直到满足终
止条件。
最速下降法的关键在于选择合适的步长和搜索方向。
步长过大可能导致无法收敛,步长过小可能导致收敛速度慢。
搜索方向的选择应该保证在当前点能够使目标函数值下降最快。
需要注意的是,最速下降法可能会陷入局部最小值,而无法达到全局最小值。
为了克服这个问题,可以考虑使用其他优化算法,如共轭梯度法、牛顿法等。
最速下降法求范围内极值 matlab
最速下降法是一种常用的优化算法,可以用于求解多元函数的极小值。
在Matlab中,我们可以通过编写程序来实现最速下降法求取函数在给定范围内的极小值。
本文将围绕最速下降法在Matlab中的实现展开讨论,包括算法原理、程序编写、实例演示等内容。
一、最速下降法的原理及步骤最速下降法是一种基于梯度下降的优化算法,其原理是通过沿着函数梯度的负方向不断迭代,来逼近函数的极小值点。
其基本步骤如下:1. 初始化:选择初始点x0,设定迭代终止条件。
2. 梯度计算:计算当前点的梯度值∇f(xk)。
3. 方向选择:选择负梯度方向p_k=-∇f(xk)。
4. 步长确定:求解使得f(xk+α_pk)最小化的步长αk。
5. 迭代更新:更新迭代点xk+1=xk+αkp_k,并检查迭代终止条件。
二、最速下降法在Matlab中的实现在Matlab中,我们可以通过编写程序来实现最速下降法。
以下是一个简单的最速下降法求解函数极小值的Matlab程序示例:```matlabfunction [x, fval, exitflag, output] = steepestdescent(fun, x0, options)fun为目标函数句柄,x0为初始点,options为优化选项[x, fval, exitflag, output] = fminunc(fun, x0, options);end```以上代码中,我们使用了Matlab内置的优化函数fminunc来实现最速下降法。
其中fun为目标函数句柄,x0为初始点,options为优化选项,x为最优解,fval为最优值,exitflag为退出标志,output为优化输出。
三、实例演示下面我们以一个简单的二元函数为例,演示最速下降法在Matlab中的实现过程。
假设我们要求解的目标函数为f(x, y) = x^2 + y^2,且x, y∈[0, 2]。
我们可以通过编写如下Matlab程序来实现最速下降法的求解:```matlabfun = (x) x^2 + y^2; 定义目标函数x0 = [1, 1]; 设置初始点options = optimoptions('fminunc', 'Algorithm', 'quasi-newton'); 设置优化选项[x, fval, exitflag, output] = steepestdescent(fun, x0, options); 调用最速下降法disp(['最优解为:', num2str(x)]);disp(['最优值为:', num2str(fval)]);```通过以上程序,我们可以得到最优解为x=[0, 0],最优值为fval=0,这即为目标函数在给定范围内的极小值点及极小值。
最速下降法

0 为一维搜索最佳步长,应满足极值必要条件
0Байду номын сангаас0 f x1 min f x f x
min 2 4 25 2 100 min
2 2
0 8 2 4 5000 2 100 0
解 取初始值
x 0 2, 2
T
则初始点处函数值及梯度分别为
f x0 104 2 x1 4 f x0 50 x2 x0 100 沿负梯度方向进行一维搜索,有
x1 x 0 0f x 0 2 4 2 4 0 2 0 100 2 100 0
从直观上看在远离极小点的地方每次迭代可能使目标函数有较大的下降但是在接近极小点的地方由于锯齿现象从而导致每次迭代行进距离缩短因而收敛速度不快
最速下降法
1 无约束多变量问题最优化
考虑无约束问题
min
f (X) X E n
其中函数f (X)具有一阶连续偏导数。 在处理这类问题时,总希望从某一点出发,选择一个目
其中 d ( k ) 是从 x ( k ) 出发的搜索方向,这里取在点x ( k ) 处的最速 下降方向,即
d ( k ) f ( x ( k ) )
k 是从 x ( k )出发沿方向 d ( k )进行一维搜索的步长,即 k 满足
f ( x ( k ) k d ( k ) ) min f ( x ( k ) d ( k ) )
x 0
*
f
* x 0
0
T
根据一元函数极值的必要条件
和复合函数求导公式可得:
最速下降法

一、最速下降法基本原理(一)无约束问题的最优性条件无约束问题的最优解所要满足的必要条件和充分条件是我们设计算法的依据,为此我们有以下几个定理。
定理1 设f :1n R R →在点nx R ∈处可微。
若存在n p R ∈,使()0T f x p ∇<则向量p 是f 在点x 处的下降方向。
定理2 设1:nf R R →在点n x R *∈处可微。
若x *是无约束问题的局部最优解,则()0f x *∇=由数学分析中我们已经知道,使()0f x ∇=的点x 为函数f 的驻点或平稳点。
函数f 的一个驻点可以是极小点;也可以是极大点;甚至也可能既不是极小点也不是极大点,此时称它为函数f 的鞍点。
以上定理告诉我们,x *是无约束问题的的局部最优解的必要条件是:x *是其目标函数f 的驻点。
现给出无约束问题局部最优解的充分条件。
定理3 设1:nf R R →在点nx R *∈处的Hesse 矩阵2()f x *∇存在。
若()0f x *∇=,并且2()f x *∇正定则x *是无约束问题的严格局部最优解。
一般而言,无约束问题的目标函数的驻点不一定是无约束问题的最优解。
但对于其目标函数是凸函数的无约束凸规划,下面定理证明了,它的目标函数的驻点就是它的整体最优解。
定理4 设1:nf R R →,n x R *∈,f 是nR 上的可微凸函数。
若有()0f x *∇=则x *是无约束问题的整体最优解。
(二)最速下降法的基本思想和迭代步骤最速下降法又称为梯度法,是1847年由著名数学家Cauchy 给出的。
他是解析法中最古老的一种,其他解析方法或是它的变形,或是受它的启发而得到的,因此它是最优化方法的基础。
设无约束问题中的目标函数1:nf R R →一阶连续可微。
最速下降法的基本思想是:从当前点k x 出发,取函数()f x 在点kx 处下降最快的方向作为我们的搜索方向kp .由()f x 的Taylor 展式知()()()(k k k k T k k f x f x tp t f x p o tp -+=-∇+‖‖)略去t 的高阶无穷小项不计,可见取kp =()kf x -∇时,函数值下降得最多。
最优化方法-最速下降法
计算步骤
设f (X )是可微函数,精度要求为
X f ( ) K 1
,
X 0 为初始点。
(1)计算梯度
f
(
X
)
k
,初始k=0;
(2)
Pk
f
(
X
)
k
(3)求解 k
min f ( X k Pk)
s.t. 0
设 k 是一维搜索的最优解;
(4)求下一个点
评价
由例题中可以发现两次迭代的搜索方向满足:
P P P P T 0, T 0,...,
01
12
即相邻两个搜索方向 PK 与 PK1 正交,这是最速下降
法的搜索方向的基本形质。因此,最速下降法的迭代
路线呈锯齿形,尤其是在极小点附近,锯齿现象尤为
严重,从而影响了迭代速度。
评价
锯齿现象
最优化技术
第三章 7节 最速下降法
主要内容
1原 理
2 计算步骤
3 例题分析 4评 价
原理
定义:用来求解无约束多元函数 min f(x)
极小化问题的一种迭代算法。
拓展:
最速下降法又称梯度法,是 1847 年由著名数学家
Cauchy 给出的,它是解析法中最古老的一种,其他解析 方法或是它的变形,或是受它的启发而得到的,因此它是 最优化方法的基础。
X
)
0
(1,1)T
3-最优步长
2
X P ( ) f 5
0
0 2
1
0
应用一维搜索技术,解得函数最小值点 0 =0.2
举例分析
4-下一搜索点
X1
最速下降法的基本思路

最速下降法的基本思路最速下降法是一种求解无约束优化问题的迭代算法,其基本思路是从当前点出发,沿着当前点到最优解的方向进行移动,并以一定的步长进行迭代更新,直到达到最优解或者满足一定的停止准则。
本文将从以下几个方面详细介绍最速下降法的基本思路。
一、最速下降法的数学模型在介绍最速下降法的基本思路之前,我们先来看看最速下降法所要求解的数学模型。
对于一个无约束优化问题:min f(x),x∈R^n其中f(x)为目标函数,x为自变量向量。
我们希望求出目标函数的全局最小值或局部最小值。
二、梯度和梯度方向在介绍最速下降法的基本思路之前,我们需要先了解两个概念:梯度和梯度方向。
1、梯度对于一个可微函数f(x),在点x处,它的梯度定义为:grad f(x)=[∂f/∂x1, ∂f/∂x2, …, ∂f/∂xn]T其中T表示矩阵转置。
梯度是一个向量,它指向函数在该点上升最快的方向,其模长表示该方向上函数增加的速率。
2、梯度方向对于一个可微函数f(x),在点x处,它的梯度方向定义为:-df/dx=-(∂f/∂x1, ∂f/∂x2, …, ∂f/∂xn)T梯度方向是一个向量,它指向函数在该点下降最快的方向,其模长表示该方向上函数减少的速率。
三、最速下降法的基本思路有了梯度和梯度方向的概念之后,我们就可以来介绍最速下降法的基本思路了。
最速下降法是一种基于负梯度方向进行迭代更新的优化算法。
具体来说,它的基本思路可以分为以下几个步骤:1、初始化首先需要选择一个初始点x0作为起始点。
2、计算负梯度在当前点xk处计算目标函数f(x)的负梯度-df/dx,并将其作为移动方向。
3、确定步长确定一个合适的步长αk,使得目标函数沿着移动方向能够有足够大的下降。
4、迭代更新根据当前点和移动方向以及步长进行迭代更新:xk+1 = xk + αk*(-df/dx)5、停止准则判断是否满足停止准则,如果满足,则停止迭代;否则返回步骤2。
四、最速下降法的收敛性最速下降法是一种保证收敛的优化算法,但是其收敛速度较慢。
最速下降法

数学软件与实验结课作业------最速下降法班级:071111学号:07111008 07111012 07111057姓名:李咏邹仁朋宋郝开摘要最速下降法又称梯度法,早先求解无约束多元函数极值的数值方法,是1847年由著名数学家Cauchy给出的,它是解析法中最古老的一种,是最优化方法的基础。
它工作量较少,且储存变量不多,初始点要求也不高,但效率不高。
最速下降法多用来解觉n元函数的无约束非线性规划问题。
利用负梯度方向来决定每次迭代的新的搜索方向,使得每次迭代能使待优化的目标函数逐步减小,从而最终找到最优解。
最速下降法的基本思想是:从当前点x k出发,取函数f(x)在点x k 处下降最快的方向作为我们的搜索方向p k,由f(x)的Taylor 展式知(x k) - f (x k +t p k) = -tÑf (x k)T p k+ o‖( t p k‖),略去t的高阶无穷小项不计,可见取p k= -Ñf (x k)时,函数值下降得最多。
从而,构造出最速下降法的迭代步骤求解。
最速下降法的一种简单形式是:x(k+1)=x(k)-a*g(k),其中a称为学习速率,可以是较小的常数。
g(k)是x(k)的梯度。
一、问题描述求解最优化问题是通常采用两种方法:1.解析解法——利用函数的导数构造迭代公式使之收敛到极值点的方法;2.直接解法——根据数学原理,用尽可能少的计算量直接比较函数值的大小,来确定函数极值的方法。
在最优化计算方法中,要求解12(,,,)n y f x x x = 的局部最小值,选用解析解法,采用如下的方法进行迭代计算:先给出初始点000012(,,,)n x x x =x ,然后根据其梯 度方向0()f ∇x ,计算一元函数0010()min (())y f f λλλ≥=-⋅∇x x ,并得到1001()f λ=-⋅∇x x x 。
如此反复迭代,最终收敛于局部最优点。
实现该算法。
最速下降法-最优化方法

(4)f
(
X
)
3
(0.04,0.04)T
,
f ( X 3) 2 0.0032 0.01
X 3 已达到预定精度要求,迭代终止。
故f(x)的无约束近似极小点为
X X 3 (0.96,1.44)T
注:原问题的精确极小点为
X (1,1.5)T
3. 最速下降法性质与评价
x1 x1
2 2
x2 x2
1 1
(1) X 0 (1,1)T
,
f
(
X
)
0
(1,1)T
,
P0
f
(
X
)
0
(1,1)T
X P (t ) f( 0 t
)
0
5t 2
2t
1
,t>0
ቤተ መጻሕፍቲ ባይዱ
应用一维搜索技术,可解得 (t) 的极小点为t0=0.2
所以 X 1 X 0 t0 P0 (1,1)T 0.2(1,1)T (0.8,1.2)T
X X P
Y f (X ) N 输出X
停止
例3.18 用最速下降法求解无约束优化问题:
x x x x x x min f (X ) 2 2 2
2
1
12
2
1
2
初始点 X 0 (1,1)T
,迭代终止准则为
f
(X k)
2
0.01
。
解:
f
(
X
)
4 2
1. 最速下降法原理 2. 最速下降法算法 3. 最速下降法性质与评价
最速下降法

收敛性问题的基本概念 最速下降法的迭代原理 最速下降法的迭代步骤 最速下降法的举例 最速下降法的收敛结论
Байду номын сангаас
无约束问题4-4
1.收敛性问题的基本概念 定义4-9
(k )
min f ( X ) n
X R
若序列 { X },对于 0 ,存在正整数 N ( ),
(k ) (k ) k N 时,有 X X ,即 X X 0, 当 k
2.迭代原理 min f ( X ) X R
n
1 0 0 min f ( X 0 p 0 ) f ( X 0 0 p 0 ), X X 0 p X , p f ( X ), 0 1 1 1 1 1 min f ( X 1 p1 ) f ( X 1 p ), X 2 X 1 1 p1 X , p f ( X ), 0 k 1 k k k k k min f ( X k p k ) f ( X k k p k ), X X k p X , p f ( X ), 0
X (k ) X
X ( k 1) X
X ( k 2) X
X ( k 3) X
X ( k 4) X
0.1
0.09
0.05
0.02
0.01
无约束问题4-4
1.收敛性问题的基本概念 定义4-10
若 X ( k ) X k 0,
( ) ( f ( X ) p )0 充分小时 0 结论: f ( X ( k ) )T p( k ) 0 时,p(k)是 f (X)在X(k) 处的下降方向。 当
(k ) T (k )
最优化方3.3法最速下降法(梯度法)

例 3.4.4 用 Newton 法求解问题 min f (x) 4x12+x22-x12x2
取初始点为 xA (1,1)T , xB (3, 4)T , xC (2, 0)T 。
min f (x) 4x12+x22-x12x2
g
(
x)
8x1-2x1 x2 2 x2-x12
G(
x)
0.1273 0.0003 0.0000
1.3388 0.0511 0.0001
xk (0,0) 严格局部极小点
g
(
x)
8x1-2x1 x2 2x2-x12
G(0,0) 8 0 0 2
G(
x)
8-2x2 -2 x1
-2x1 2
解: (2)用 Newton 法得到得迭代点如表所示:
开域内有极小点 x*,设G* G(x*)正定,则当 x0与 x*充分
接近时,对一切k ,Newton 法有定义,且当xk 为无穷 点列时,xk 二阶收敛于 x*,即hk 0且
f
( xk
)存在,所以有
fk fk1 0。 (3.8)
用反证法。假设 gk 0不成立,则0 0及无穷多个 k ,使 gk 0。对这样的k ,有
gkT pk pk 0,
于是,由 Taylor 公式
f (xk pk ) f (xk ) g(k )T pk
f
(
xk
)
g
T k
pk
g(k ) gk T
最速下降法
k=k+1
x(1), ε >0, k=1
Yes
|| ▽f(x(k) ) ||< ε?
No
d(k)= -▽f(x(k) )
stop. x(k) –解
最速下降法

随着人工智能、模糊控制、模式识别、人工网络等新技术的应用和发展。
可以让它们与广义预测控制相结合,建立高精度、多模态的预测模型。
使广义预测控制在异常情况下可以稳定运行,推进广义预测控制的进一步发展。
2.2.1最速下降法最速下降法是无约束最优化中是比较有效的方法,它是以d}=一可(x})作为下降方向的算法。
其迭代格式为xx+i=xx一。
*Of (xk)上式中,一般通过精确线搜索准则求得步长因子。
*,当然也不排除可以利用非精确线搜索准则来求得步长因子。
*。
不管最速下降法采取何种线搜索准则,它均具有全局收敛性,但是这也不能直接就认为最速下降算法就是一个良好的优化算法。
在实际试验中,有很多优化问题利用最速下降法并不是下降的特快,反而下将的十分缓慢。
这是因为出现了锯齿现象:就是在计算过程中,最速下降法开始几步还是挺快的,但是当目标函数f (x)的等高线接近于一个球的时候,就出现了类似锯齿现象,前进十分缓慢,降低了算法的效能。
2.2.12.2.2牛顿法牛顿法也是无约束最优化问题中的一种经典算法,它是利用目标函数.f (x)的二次泰勒展开式,并将二次泰勒展开式进行极小化。
其迭代格式为x}+}=xA十d}(2-5)其中步长因子。
、=l} d、为02f (x} )d + Of (xA ) = 0的解。
当目标函数f(x)是正定二次函数的时候,牛顿法可以一步达到最优解;当目标函数f (x)是非二次函数的时候,牛顿法经过有限次迭代之后就不能确保求得目标函数f (x)的最优解。
我们知道目标函数f (x)在极小点附近是很接近于二次函数的,所以,假如初始点非常靠近无约束最优化问题((1-1)的最优解x的时候,并且}Z.f (x.)正定的时候,那么牛顿法就会有很快的收敛速度,而由此算法产生的点列也具有了超线性收敛速度,同时还在一定条件下具有二次收敛性;假如初始点与无约束最优化问题(1-1)的最优解x’相距比较远的时候,这时的}Z.}(x})就不一定是正定的了,也就存在了一个问题,那就是此时的牛顿方向就不一定是下降方向,有可能是上升方向,此时由此算法产生的点列可能也就不收敛于无约束最优化问题((1-1)的最优解了。
最速下降法
1.给定初始点x0,置k:=0. 2.计算xk点的梯度,若梯度小于等于事先给 定的非常小的正数 ,则终止,否则,下 一步。
3.令z k f ( x k ).
4.求使f ( x k z k )最小的 , 记为k ,即最佳步长. 令x k 1 x k k z k , 转2.
d T 2 f ( x* )d r 即: 1 2 T 2 d f ( x * )d o(2 ) 1 2 o ( ) 2 r 0 2 2 2
即当小到一定程度时, f ( x d )-f ( x ) 0
* *
也即:x*是严格局部极小点。
算法迭代步骤(求出的是极小值点)
因为x 是局部极小值点,所以当 充分小时, f ( x d )-f ( x ) 0 令 0, 取极限可知,
1 T 2 d f ( x )d 0 2
即2 f ( x )半正定
充分条件如下(即局部最优解的刻画,当满足什么 条件,所得的解就是局部最优解)
定理3:若f 是连续可微的凸函数,则x 是 min f ( x) 问题 的最优解的充分必要条件是: n x E f ( x ) 0 进一步,若f ( x)是严格凸函数,则 x 是 唯一的最优解。
(k ) (k )
lim x ( k ) x *
k
局部收敛,全局收敛
收敛速度:设序列x k 收敛到x*,若
k
lim
x k 1 - x * x x*
k
存在,
(0,1), 线性收敛; 0,超线性收敛;
若存在p, 使得 lim
k
x k 1 - x * xk x *
第一节、最速下降法
第二章 (2)最速下降法-Newton法-共轭梯度法
取初始向量 x0 1,1T .
解:函数的梯度为
f
(
x)
2
x1 2x2 2 x1 +4x2
4
,
第1次迭代:
f
x0
4
2
,
d 0 = f
x0
4 2
,
x0
+
d
0
=
1+4 1 2
的最大和最小特征值
对于正定二次函数 f (x) 1 xTGx bT x
步长
2
最速下降法的下一个迭代点,
xk 1
xk
gkT gk gkT Ggk
gk
二、最速下降法
其中:
二、最速下降法
得最速下降法的步长
k
gkT gk gkT Ggk
从而下一个迭代点为
xk 1
xk
gkT gk gkT Ggk
+0d
0
=
1 1
+1/4
4 2
=
2 1/2
,
f
x1
1
2
,
第2次迭代:
d1= f
x1
1 2
,
x1
+
d
1
=
2+ 1/2+2
,
()=f x1+d1 =f 2+,1/2+2
1
公式
最速下降法是以负梯度方向作为下降方向的极小化算法,又称梯度法,高斯消元法(或译:高斯消去法),是线性代数中的一个算法,可用来为线性方程组求解,求出矩阵的秩,以及求出可逆方阵的逆矩阵。
当用于一个矩阵时,高斯消元法会产生出一个“行梯阵式”。
高斯消元法可以用在电脑中来解决数千条等式及未知数。
不过,如果有过百万条等式时,这个算法会十分费时。
一些极大的方程组通常会用叠代法来解决。
亦有一些方法特地用来解决一些有特别排列的系数的方程组。
牛顿法的基本思想是在极小点附近通过对目标函数做二阶Taylor展开,进而找到的极小点的估计值[1]。
计算结果需要的计算公式1.吸光度计算函数部分溶液的吸光度(单)=Log(AD杯-AD暗)/ (AD溶-AD暗)*20000-溶液的吸光度(双)= 主吸- 次吸体积校正因数终点法双试剂 FV=(R1+S)/(R1+r2+S) 单试剂 FV=(R1)/(R1+S)计算终点法的反应幅度值/反应浓度参数表(R1,R2,S的量,结果保留的小数位数,起点、终点吸光度)返回幅度需要计算体积校正因子,和反应幅度反应幅度=终点的吸光度-(起点吸光度×体积校正因子)计算两点法的反应幅度值/反应浓度参数表,(结果小数位数,起点、终点,两点时间差)返回反应幅度反应幅度=((终点的吸光度-起点吸光度)/反应时间)*60计算动力学法的反应幅度值/反应浓度计算项目采样时刻值=当前时刻–起点时刻参数表(结果小数位,数据点个数,吸光度数组,时间采样时刻数组)返回反应幅度最小二乘法计算斜率公式GetLeastSqure,求浓度单点线形定标fParamb=0.0与两点线形定标fParamb=的区别定标参数计算函数部分1.单点线形定标参数计算过程(R=KC)2.两点线形定标参数计算过程(R=KC+b)fModifyA=k fModifyB=b C=浓度b=截距c=(反应幅度-b)/KR= k* C+b C(测试结果)定标中的k,a,b,c,d,R0是什么意思a、b、c、d、是指数或者方程式向量R0,是确定参考点为0点时(终点法)当b=0 R=kx+bR2coe相关系数定标灵敏度FClimite0 反应幅度数组FClimite1 反应浓度数组定标是通过浓度计算出三条线的反应幅度定标测试数据表中的定标结果,是两条相近曲线的平均值计算定标灵敏度(最大浓度对应的反应幅度-最小浓度对应的反应幅度)两点法有两个浓度,但直接体现的还是浓度。
最速下降法

最速下降法
最速下降法又称为梯度法,是1847年由著名数学家Cauchy给出的,它是解析法中最古老的一种,其他解析方法或是它的变形,或是受它的启发而得到的,因此它是最优化方法的基础。
它是一种沿着N维目标函数的负梯度方向搜索最小值的方法。
1 算法原理
函数的负梯度表示如下-g(x)=-∇f(x)=-[∂f(x)
∂x1
∂f(x)
∂ x2
…∂f(x)
∂ x N
]T,搜索步长可调整,
通常记为αk(第k次迭代中的步长)该算法利用一维的线性搜索方法,如二次逼近法,沿着负梯度方向不断搜索函数的较小值,从而找出最优解。
2算法步骤
最速下降法的基本求解流程如下.
步骤 1 迭代次数初始化为k=k+1,求出初始点x0的函数值f0=f(x0)。
步骤 2 迭代次数加1.即k=k+1,用一维线性搜索方法确定沿负梯度方向-g k−1的步长αk−1,其中αk−1=ArgMinαf(x k−1−αg k−1/∥g
k−1∥
)。
步骤 3 沿着负梯度的方向寻找下一个接近最小值的点,其中步长为αk−1,得下一点的坐标为:x k=x k−1−αk−1g k−1/∥g k−1∥。
步骤4 如果x k≈x k−1,且f(x k)≈f(x k−1),那么就认为x k为所求的最小值点,并结束循环;否则,跳到步骤2.。
性能优化 最速下降法
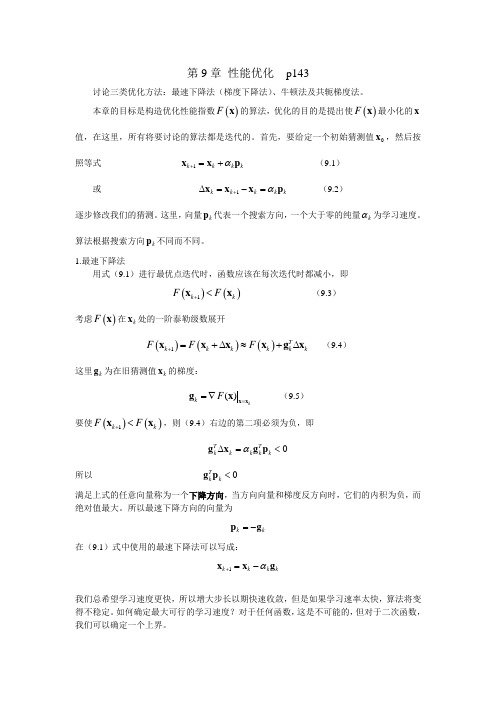
第9章 性能优化 p143讨论三类优化方法:最速下降法(梯度下降法)、牛顿法及共轭梯度法。
本章的目标是构造优化性能指数()F x 的算法,优化的目的是提出使()F x 最小化的x 值,在这里,所有将要讨论的算法都是迭代的。
首先,要给定一个初始猜测值0x ,然后按照等式 1k k k k α+=+x x p (9.1)或 1k k k k k α+∆=-=x x x p (9.2)逐步修改我们的猜测。
这里,向量k p 代表一个搜索方向,一个大于零的纯量k α为学习速度。
算法根据搜索方向k p 不同而不同。
1.最速下降法用式(9.1)进行最优点迭代时,函数应该在每次迭代时都减小,即()()1k k F F +<x x (9.3)考虑()F x 在k x 处的一阶泰勒级数展开()()()1Tk k k k k k F F F +=+∆≈+∆x x x x g x (9.4)这里k g 为在旧猜测值k x 的梯度:()kk F ==∇x x g x (9.5) 要使()()1k k F F +<x x ,则(9.4)右边的第二项必须为负,即0T T k k k k k α∆=<g x g p所以 0Tk k <g p满足上式的任意向量称为一个下降方向,当方向向量和梯度反方向时,它们的内积为负,而绝对值最大。
所以最速下降方向的向量为k k =-p g在(9.1)式中使用的最速下降法可以写成:1k k k k α+=-x x g我们总希望学习速度更快,所以增大步长以期快速收敛,但是如果学习速率太快,算法将变得不稳定。
如何确定最大可行的学习速度?对于任何函数,这是不可能的,但对于二次函数,我们可以确定一个上界。
(1)稳定的学习速度学习速度受限于赫森矩阵的最大特征值。
在最大特征值的特征向量方向上算法收敛最快,且这个方向上不能越过极小点太远。
然而,在最小特征值的特征向量方向上算法将收敛最慢。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
X ( k 1) X X
(k )
X
p
,
当 p = 2 时,X
( k 1)
X 与 X
( k 1)
(k)
X
2
同阶无穷小
(k )
当 1, k 时, X
X (k ) X
X ( k 1) X
X
X
X
2
X ( k 2) X
则X ( k ) k X .
若 { X } 收敛于 X ,且满足 lim k
(k ) { X } 收敛于 X 的阶。 则 p 称为
X ( k 1) X X
(k )
X
p
,
当 p = 1 时,称为一阶收敛; 当 p = 2 时,称为二阶收敛;
1 T 结论:正定二次函数 f ( X ) X QX bT X c 有唯一 2 全局极小点:X Q 1b
无约束问题4-4
一.最速下降法
f (X ) ( NP) min X R
n
收敛性问题的基本概念 最速下降法的迭代原理 最速下降法的迭代步骤 最速下降法的举例 最速下降法的收敛结论
第四章 无约束最优化问题
4.1 非线性规划数学模型 4.2 凸函数和凸规划 4.3 一维搜索 4.4 无约束优化问题的解法
第四章 无约束最优化问题
第四节 无约束优化问题的解法
最速下降法 Newton法 拟Newton法 共轭梯度法
一.最速下降法
f (X ) ( NP) min X R
(k ) { X } 收敛于 X 的阶。 则p称为
X ( k 1) X X
(k )
X
p
,
( k 1) (k) X X 与 X X 当 p = 1 时, 同阶无穷小
( k 1) (k) X X X X 当 1, k性收敛;
无约束问题4-4
1.收敛性问题的基本概念 定义4-10
(k )
若 X ( k ) X k 0,
则X ( k ) k X .
若 { X } 收敛于 X ,且满足 lim k
(k ) { X } 收敛于 X 的阶。 则p称为
f ( X ( k ) )T p ( k ) f ( X ( k ) ) p ( k ) cos cos 1
n
收敛性问题的基本概念 最速下降法的迭代原理 最速下降法的迭代步骤 最速下降法的举例 最速下降法的收敛结论
无约束问题4-4
1.收敛性问题的基本概念 定义4-9
min f (X ) n
X R
(k ) 若序列 { X },对于 0 ,存在正整数 N ( ),
(k ) (k ) X X X X k N 当 时,有 ,即 k 0,
最速下降法 Newton法
当 1 p 2 时,称为超线性收敛;拟Newton法
无约束问题4-4
1.收敛性问题的基本概念 定义4-12
若某算法对于任意正定二次目标函数,从任意初始点 出发,都能经过有限次迭代达到其极小点,则该算法称 为具有二次终止性的算法或二次收敛算法.
1 T f ( x1 , x2 ,, xn ) X QX bT X c 2 当 Q 为正定阵时,称 f (X) 为正定二次函数。
X (k ) X
X ( k 1) X
X ( k 2) X
X ( k 3) X
X ( k 4) X
0 .1
0.09
0.05
0.02
0.01
无约束问题4-4
1.收敛性问题的基本概念 定义4-10
(k )
若 X ( k ) X k 0,
(k ) { X } 收敛于 X ,记为X ( k ) X . 则称 k
X
0
X1
X
2
X3
X4
X
X k
X f ( X k ) X ( k ) k
无约束问题4-4
1.收敛性问题的基本概念 定义4-10
(k )
若 X ( k ) X k 0,
p( k )
X f ( x ( k ) h) f ( x ( k ) ) f ( x ( k ) )h (h) f ( X ( k ) p( k ) ) f ( X ( k ) ) f ( X ( k ) )T p( k ) ( ) f ( X ( k ) p( k ) ) f ( X ( k ) ) f ( X ( k ) )T p( k ) ( ) ( ) (k ) T (k ) ( f ( X ) p )0 充分小时 0 (k ) T (k ) 结论: 当 f ( X ) p 0 时,p(k)是 f (X)在X(k) 处的下降方向。
无约束问题4-4
2.迭代原理 梯度的性质: 函数f 证明:
(k ) ( k ) X ( k ) (X)在X 处的负梯度方向 f ( X ( k ) )
P
(k )
f ( X ( k ) )
P
是X(k)处函数值下降最快的方向。 (k )
P P
(k )
一元函数泰勒公式:
X p
(k )
(k )
(k )
则X ( k ) k X .
若 { X } 收敛于 X ,且满足 lim k
(k ) { X } 收敛于 X 的阶。 则p称为
X ( k 1) X X
(k )
X
p
,
当 p = 1 时,称为一阶收敛; 当 p = 2 时,称为二阶收敛;
X ( k 3) X
X ( k 4) X
0 .1
0.01
0.0001
108
1016
无约束问题4-4
1.收敛性问题的基本概念 定义4-10
(k )
若 X ( k ) X k 0,
则X ( k ) k X .
若 { X } 收敛于 X ,且满足 lim k