电动叉车驱动控制器设计与实现
用于电动叉车行走驱动的开关磁阻电机控制系统研究的开题报告

用于电动叉车行走驱动的开关磁阻电机控制系统研究的开题报告一、选题背景电动叉车是一种重要的物流设备,其行走驱动是关键部件之一。
传统的电动叉车行走驱动系统采用直流或交流电动机作为驱动器,但存在能效低、噪声大、维护成本高等问题。
因此,开发一种新型的高效、低噪声、易维护的驱动系统对于提高电动叉车的性能和竞争力具有重要意义。
开关磁阻电机是一种新型的电机,其结构简单、维护成本低、高速运转稳定性好,而且能效高、噪声小,因此在工业领域逐渐得到广泛的应用。
在电动叉车行走驱动系统中应用开关磁阻电机具有优势,有望提高电动叉车的性能和竞争力。
二、研究目的本研究旨在设计一种开关磁阻电机控制系统,用于电动叉车行走驱动。
具体目的包括:1. 研究开关磁阻电机的工作原理和特性,分析其在电动叉车行走驱动中的应用前景;2. 设计开关磁阻电机控制系统,包括控制器设计、电机参数选型等;3. 完成整个系统的搭建和调试,验证控制系统的有效性和稳定性;4. 对比传统的电动叉车行走驱动系统和开关磁阻电机控制系统性能指标,分析其优劣之处。
三、研究内容与方法1. 研究开关磁阻电机的工作原理和特性,包括电机的结构、原理、能效等方面,为之后的控制系统设计提供基础理论支撑。
2. 设计开关磁阻电机控制系统,包括控制器、电源、电机等方面,对电路进行设计和模拟验证,并进行参数选型和性能评估。
3. 搭建控制系统,对整体系统进行软硬件的调试和优化,验证系统的效果和稳定性。
4. 分别测试传统的电动叉车行走驱动系统和开关磁阻电机控制系统的性能指标,如能耗、噪声、效率、可靠性等方面,比较两种系统的优劣和应用前景。
研究方法主要包括理论分析、实验测试和仿真模拟等方面。
四、预期成果本研究预期能够达到以下成果:1. 研究开关磁阻电机在电动叉车行走驱动中的应用前景,为该领域的研究提供理论基础支持。
2. 设计一个基于开关磁阻电机的电动叉车行走驱动控制系统,对系统性能进行测试,并通过仿真模拟验证系统的可行性和可靠性。
轻小型三支点电动叉车驱动与转向系统设计
轻小型三支点电动叉车驱动与转向系统设计摘要:叉车作为一种搬运车辆在工业生产中都得到广泛应用。
本文在现有三支点叉车的基础上,对其驱动与转向系统进行设计与改进,实现了后轮驱动和后轮转向的功能,使叉车的转弯半径减小并能够在狭窄空间内进行货物的运转,对提高仓储效率和土地利用率有重要意义。
关键词:三支点叉车;后轮驱动;后轮转向引言叉车作为一种搬运车辆在工业生产以及日常生活中都得到广泛应用。
早期,内燃叉车占有着较大的市场。
由于叉车需要经常在室内进行作业,所以会产生一定的尾气排放问题。
随着工业污染的加剧和环保概念的提出,零排放、无污染、噪声小的电动叉车成为工程搬运车辆中的新宠。
另外,早期叉车多采用四支点的支承形式,虽稳定性好但较为笨重。
然而,后来出现的三支点叉车以其外观新颖、机动灵活的特点颇为人们青睐。
1.叉车整体构思三支点的支承形式,顾名思义,为前方两处支点,后方一处支点。
为增强其稳定性,后方支点处可用两个轮胎并排支承。
与四支点相比,三支点叉车转向更加灵活,转弯半径更小,可以在更加狭窄的空间内进行货物的运转。
而这一点也正好符合了当前减小作业空间、提高仓储效率的要求。
基于以上原因,也为更好地发挥三支点叉车的优势,我们在现有叉车的基础上,对其驱动系统和转向系统进行了相关设计与改进。
我们所设计的是一种三支点支承、后轮驱动、后轮转向的蓄电池叉车,长2.0m,宽0.85m,额定起升重量0.8t,与现有叉车相比,外形更加轻巧,操纵更加灵活。
除了用于工业搬运外,也可用于服务业中的短距离货物运输,甚至可以进出宿舍、厨房等狭小空间。
2.驱动系统设计目前,市场上的叉车多为前轮驱动。
该种驱动形式的实现方式如下:驱动电机输出的转矩经一系列减速装置后,改变其大小和方向,最终传递到左右车轮上。
两个车轮由半轴和差速器进行连接。
尽管这种驱动形式使整车的稳定性较好,但差速器的引入使叉车不易充分实现90o转向,而且电机前置所需要的驱动功率也较大,有一定的局限性。
电动叉车行走驱动系统设计与实现

reliable,outstanding performance,strong practicability.
Key words:Electric forklift,DSP,PMSM,drive system,walking function
II
硕士论文
电动叉车行走驱动系统设计与实现
目录
摘 要...............…...........................…...….........................................................I
2驱动系统控制方案研究………………………………………………………………。5
2.1永磁同步电机电流控制……………………………………………………………。5 2.1.1电流变换………………………………………………………………………5 2.1.2 id=0控制………………………………………………………………………………………………7
system.
Through the electric forklift motor drive system and control requiremems of the analysis,
the paper gives a low voltage high current PMSM drive scheme.The master control chip is high performance DSP chip TMS320F28 1 2.The system uses vector control algorithm and
电动叉车设计知识点
电动叉车设计知识点在工业领域中,电动叉车被广泛应用于货物搬运和仓储作业,其设计直接关系到工作效率和安全性。
本文将介绍一些关键的电动叉车设计知识点,包括驱动系统、结构设计、操控方式和安全特性等方面。
一、驱动系统设计1. 电动机选型:选择适合叉车使用的直流或交流电动机,并考虑其功率和扭矩输出能力。
还需要考虑电动机的散热和保护机制,以确保在高负荷工作条件下能够正常运行。
2. 电池系统设计:选择合适的电池类型(如铅酸电池、锂离子电池等)、容量和电压,并设计合适的电池安装和连接方式。
此外,还需要考虑电池充电机制和充电时间,以提高叉车的工作效率。
3. 控制系统设计:设计合理的电机控制系统,包括电机控制器、传感器和反馈回路等。
控制系统应能实现精确的速度和转向控制,提供良好的操控性能和驾驶稳定性。
二、结构设计1. 车身结构:电动叉车的车身结构应具备足够的强度和刚度,以承受各种工况下的荷载,同时尽可能降低自重。
高强度钢材的使用可以提高车身的耐用性和安全性。
2. 叉臂设计:叉臂是叉车的主要工作部分,它应具备足够的刚度和承载能力。
叉臂的设计应考虑货物的尺寸和重量,确保稳固地搬运货物,并避免因超载而导致的事故。
3. 悬挂系统设计:悬挂系统对电动叉车的平稳行驶和提升能力有重要影响。
设计合理的悬挂系统可以减少车身的颠簸和震动,提升驾驶员的舒适性和工作效率。
三、操控方式设计1. 方向盘和操纵杆:提供直观和灵活的操控方式,使驾驶员能够准确控制电动叉车的转向和运动。
设计应考虑到不同驾驶员的身体特点和操作习惯,提供可调节的操控装置。
2. 人机工程学设计:操控装置的位置、形状和操作力度等应符合人体工程学原理,减少驾驶员的疲劳和操作失误。
另外,还应提供合适的工作空间和足够的视野,以确保驾驶员在工作中具备良好的工作环境。
四、安全特性设计1. 碰撞安全设计:为电动叉车配置碰撞保护装置,如防撞杆、防撞警示灯等,以减少碰撞事故的发生。
另外,还应配备可靠的制动系统和紧急制动装置,确保在紧急情况下能够迅速停车。
一种电动叉车直流电控系统的设计方案

2352018年第4期一种电动叉车直流电控系统的设计方案闫君杰,王国盛摘 要:提供了一种电动叉车直流电控系统的设计方案。
系统采用功率场效应晶体管(MOSFET)控制器,响应高、压降小;外电路设计结构简单、操作方便。
该系统装车试验,能够高效、可靠工作。
该方案具有很强的生产指导意义。
关键词:直流电机;调速系统电路;控制器(河南工学院,河南 新乡 453000)作者简介:闫君杰(1980-),女,河南新乡人,研究生,研究方向为车辆工程。
基金项目:河南省教育厅科技研究项目(项目编号:17A58005);新乡市科技发展计划项目(项目编号:15GY14)电动叉车由于具有能量转换效率高、无废气排放、噪声低、控制方便等显著优点,得到了飞快发展。
但我国相比其他发达国家,电动叉车生产仍处于起步阶段,国内厂家的技术水平与产品质量相对于国外先进的工业车辆制造商尚有一定差距,三电(电控、电机、电瓶)状况落后。
本文介绍了一种电动叉车直流电控系统。
1 机件选择本系统设计中选用了串励直流电机作为驱动电机,铅酸蓄电池作为系统电源。
这是由于直流电动机具有结构简单,串励直流电机具有较大的起动转矩和过载能力,可以满足电动汽车快速启动、加速、爬坡、频繁启/停等要求。
铅酸蓄电池成本低,技术可靠,生产工艺成熟,应用广泛。
2 电动叉车直流电机调速系统电路设计2.1 控制器设计控制器电路总体系统框图如图1所示,控制器内部分为功率回路和控制回路两大部分。
可选用功率为3~25kW 的串励直流电机,12~48V的蓄电池供电。
图1 控制器电路总体系统框图功率回路:采用MOSFET 构成的斩波器来控制驱动电机的转速。
在MOSFET 断开的瞬间,电动机电流从续流二极管通过,续流二极管相当于整流器的功能,使电机转速变化平稳。
在蓄电池正负极间直接连接高频滤波电容,为功率开关整流后的电源提供滤波。
其中采用反接制动二极管,在串励电机反接制动期间,为电枢提供电流。
控制回路:电动汽车调速信号从控制器的油门输入端子输入,并经油门调节电路进行整形、限幅、限流等处理,失控保护模块监测输入的调速信号,一旦检测到调速信号异常则触发限流模块限制控制器输出,调速信号经过油门调节模块后进入电流限制模块,当发生欠压、过温等故障和电动汽车反接制动时,电流限制模块能够限制控制器输出电流。
毕业设计答辩电动叉车的总体设计

研究方法与内容概述
研究方法
文献综述、实地调研、实验分析等。
研究内容概述
本研究将从电动叉车的总体结构、动力系统、控制系统、稳定性等方面进行设计研究,并对其性能进行实验验证。
02
电动叉车概述
电动叉车的定义与分类
电动叉车是指以电力为主要动力源, 通过电机驱动行驶和作业的叉车。
电动叉车根据用途、结构、载重量等 可分为多种类型,如平衡重式电动叉 车、前移式电动叉车、侧面式电动叉 车等。
点,符合绿色物流的发展趋势。
研究意义
03
对电动叉车进行总体设计研究,有助于提高物流作业效率,降
低运营成本,同时推动绿色物流技术的进步。
研究目的与问题
研究目的
本研究旨在设计一款高效、稳定、环 保的电动叉车,以满足现代物流业的 需求。
研究问题
如何设计一款具备优良性能的电动叉 车,并解决其在实际应用中可能遇到 的问题?
05
电动叉车样机制作与测试
电动叉车样机制作
制作材料选择
根据设计要求,选择合适的材料,如铝合金、钢 材等,确保样机的强度和轻量化。
结构设计
根据设计图纸,进行零部件的组装和调试,确保 各部分结构符合设计要求。
控制系统搭建
根据设计要求,搭建电动叉车的控制系统,包括 电机、控制器、传感器等部件的安装与调试。
电动叉车的应用与发展趋势
电动叉车广泛应用于港口、码头、仓库、车间等场所,用于货物的装卸、堆垛、 搬运等作业。
随着环保要求的提高和能源结构的调整,电动叉车市场将进一步扩大,技术水平 也将不断提高。
电动叉车的主要技术参数
电动叉车的主要技术参数包括额定载重量、最大起升高度、 行驶速度、爬坡能力、电池续航时间等。
基于DSP的电动叉车驱动控制系统硬件设计

基于DSP的电动叉车驱动控制系统硬件设计魏 来1,袁雪松2(1.太原科技大学机电工程学院,山西太原030024;2.安徽合力股份有限公司,安徽合肥230601)摘 要:主要研究电动叉车交流控制系统,以微处理器为核心,采用异步电动机直接转矩控制算法,设计基于T MS320F2812的电动叉车用交流驱动控制器。
采用直接转矩的控制系统,该系统稳定且适宜于在电动工程车辆中推广应用。
根据电动叉车的性能指标,采用空间电压矢量分析方法,分析了直接转矩控制的基本原理、结构和算法。
针对该系统设计了DSP控制器,并设计了驱动器的外围电路。
关键词:T M S320F2812;驱动控制系统整体设计;DSP控制器;电路设计中图分类号:T P272 文献标志码:AHardware Design of Electric Forklift Driving Controlling System base on DSPWEI L ai1,Y U A N Xueso ng2(1 Colleg e of M echanical and Electr ical Engineer ing,T aiy uan U niver sity o f Science and T echnolog y,T a iyuan030024,China;2 Anhui Heli Co.,L td,H efei230601,China)Abstract:T his thesis has studied exchang e co nt rol system of electric fo rklift,w ith the fo cus on micro pr ocesso r,utilizes thear ithmetic of asy nchro no us electro moto r direct to rque co nt rol,and desig ns Ac dr ive contro ller w hich can be applied to T M S320F2812electric for klift.the thesis also intr oduced that direct tor que contr ol system is stabilizatio n and this system is fitting eng ineering vehicles.T his sy stem can be widely used in eng ineer ing vehicles.A na lyzed the basic principles,str uc-tur es and a lg orithms o f DT C by using the analyzing metho do log y o f space vo ltag e vector.W ith the aim at this system,de-sig ned the DSP contr oller and dev ised the dr iv ing periphery of the circuit,including circuit design.Key words:T M S320F2812,Integer desig n o f driv ing contr olling sy stem,DSP co ntr oller,Cir cuit desig n1 DSP T M S320F2812控制器的设计1.1 驱动控制系统整体结构设计采用以微处理器为控制核心的控制方案。
电动叉车控制系统详解(带电路图)
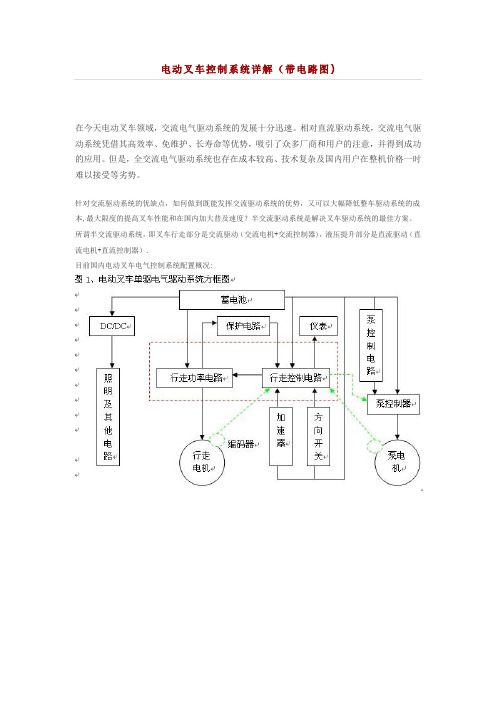
电动叉车控制系统详解(带电路图)在今天电动叉车领域,交流电气驱动系统的发展十分迅速。
相对直流驱动系统,交流电气驱动系统凭借其高效率、免维护、长寿命等优势,吸引了众多厂商和用户的注意,并得到成功的应用。
但是,全交流电气驱动系统也存在成本较高、技术复杂及国内用户在整机价格一时难以接受等劣势。
针对交流驱动系统的优缺点,如何做到既能发挥交流驱动系统的优势,又可以大幅降低整车驱动系统的成本,最大限度的提高叉车性能和在国内加大普及速度?半交流驱动系统是解决叉车驱动系统的最佳方案。
所谓半交流驱动系统,即叉车行走部分是交流驱动(交流电机+交流控制器),液压提升部分是直流驱动(直流电机+直流控制器).目前国内电动叉车电气控制系统配置概况:这种半交流方案有哪些优点?它的实际应用情况又是如何那?下面将通过具体的技术分析来为主机厂和用户介绍电动叉车半交流电气驱动系统的优势。
首先我们先了解下交流驱动系统的优缺点交流行走驱动系统在应用中的优点三相交流异步电机是交流驱动系统的主要组成部分,其工作原理是三相交流电输送给定子绕组,产生旋转磁场,感应闭合的转子绕组,从而产生感应电流,感应电流的磁场与定子旋转磁场相互作用,便产生电磁力推动转子旋转.综上所述,交流行走驱动电机与直流行走驱动电机相比:具有动力强、效率高、噪音低、体积小、重量轻、再生能量高、电磁干扰小、终身免维护、结构简单、易于冷却和寿命长等优点。
随着交流电机的控制能力大大增强和交流电机控制器硬件部分的成本逐步降低,为交流电气驱动系统广泛应用和普及创造了良好的基础。
交流驱动系统在应用中的缺点交流电气驱动系统本身也存在一些缺点:1.编码器当前的交流控制系统中,编码器是必备器件。
安装在交流电机上,用来向交流控制器提供转速及方向信号。
由于编码器目前没有国产化,价格较高。
使得交流控制系统的整体价格被抬高.2。
控制器由于交流变频调速控制技术很复杂,控制器需要选用较大的微处理器;同时,控制器的三相交流输出也需要使用比直流控制器多得多的功率器件(如:MOSFET),直接导致成本的增加。
电动平衡重乘驾式叉车的电动机与电控系统优化设计
电动平衡重乘驾式叉车的电动机与电控系统优化设计随着物流行业的快速发展和自动化水平的提高,电动平衡重乘驾式叉车作为一种重要的物流设备,在货物搬运和堆垛方面扮演着关键的角色。
然而,传统的叉车由于其内燃机的使用,在噪音、排放和维护成本等方面存在一些问题。
因此,通过优化设计叉车的电动机和电控系统,可以提高其性能和效率,并减少对环境的负面影响。
首先,电动机是叉车的核心部件,其设计的合理性直接影响着叉车的运行稳定性和效率。
在优化电动机设计时,需要考虑以下几个方面:1. 功率匹配:电动机的功率应与叉车的负载匹配,以确保叉车能够顺利进行货物搬运和堆垛。
过小的功率会导致电动机无法应对重负荷,而过大的功率则会浪费能源和增加叉车的成本。
2. 效率提升:选择高效率的电动机可以减少能源消耗,并延长电池寿命。
通过采用先进的电机技术和优化的电控系统,可以提高电动机的效率。
3. 控制精度:叉车的操纵需要精确而稳定的控制能力。
电动机的设计应考虑操纵灵活性和响应速度,保证叉车能够按照操作员的要求准确移动和停止。
另外,优化叉车的电控系统同样至关重要。
电控系统是协调电动机和其他相关组件运行的关键,其设计应具备以下特点:1. 全面的监控功能:电控系统应能够对电池、电机、传感器等关键部件进行实时监控,并提供准确的警报和反馈信息。
这样可以及时发现和处理故障,确保叉车的正常运行。
2. 简化的操作界面:设计用户友好的操作界面,使操作员能够轻松掌握叉车的各项参数和功能。
通过合理的人机交互设计,降低了操作难度和错误率,提高了叉车的安全性和效率。
3. 智能化控制策略:采用先进的控制算法和智能化的控制策略,可以根据不同的工况和负载要求,实现叉车的自适应控制和智能化优化。
例如,通过动态调整电机的转速和力矩分配,可以优化叉车的行驶稳定性和能效。
4. 能源管理系统:设计合理的能源管理系统,通过对电池的充放电控制和能量回收等手段,最大限度地延长叉车的使用时间和续航里程。
蓄电池叉车交流驱动控制系统设计

d e s i g n e d h a r d wa r e c i r c u i t a r e p e f r o r me d,a n d r e a s o n a b l y s e l e c t i n g MOS F E T mo d e l a n d g a t e r e s i s t o r c a n e f f e c t i v e l y d e c r e a s e t h e e f f e c t o f g a t e — s o u r c e p a r a s i t i c c a p a c i t a n c e o n t h e p a r a l l e l MO S F E T o n — o f f c o n s i s t e n c y .
址: 北 京市 海 淀 区 中关 村 环 保 科 技 园 稻 香 湖 地 锦 路
7号 院 2号 楼 邮
00 0 95 编: 1
2 01 2 —06 — 1 8 收 稿 日期 :
蓄 电池 叉车 交流 驱 动 控 制 系 统设 计
吴铁庄 李 春卉 周京 京
军事 交通 学院军 事物流 系 天津
[ 2 ] 田奇 .仓储 物流设 备机械 与设备 [ M] . 北京 :机 械工
业 出版 社 ,2 0 0 8 .
者: 于
靖
铁路机 车 车辆 轮 对 形 式 各 异 ,存 储 需 求 各 不 相 同 ,轮 对 检 修 流 水 线 形 式 也 各 不 相 同 ,轮 对 库 的设 计需 结 合 轮 对 检 修 流 水 线 的布 置 形 式 及 轮 对 形状 需求 定制设 计 。除动 车检修 领域 外 , 机车、 货
3 . 5 s p l 框 架 ,采用 了 WC F 、WP F等最 新技 术 。
电动平衡重乘驾式叉车的智能化控制系统设计与优化
电动平衡重乘驾式叉车的智能化控制系统设计与优化近年来,随着物流行业的发展,电动平衡重乘驾式叉车作为重要的物料搬运设备,在仓储和物流场所得到广泛应用。
为了提高叉车的性能和效率,智能化控制系统的设计与优化变得尤为重要。
本文将探讨电动平衡重乘驾式叉车的智能化控制系统设计及优化的相关内容。
首先,智能化控制系统的设计是基于对叉车行为和工作环境的全面理解和分析的。
叉车的智能化控制系统应具备以下特点:高精度的动力学建模能力、多传感器数据的融合,以及基于机器学习的智能决策算法。
对于动力学建模能力,需要从物理学的角度对叉车的运动学和动力学进行建模和分析。
叉车的运动学涉及到位置、速度、加速度等基本参数,而动力学则包括力、力矩、转矩等参数。
通过准确的动力学建模,可以更好地控制叉车的运动状态,提高操控的精确性和安全性。
在传感器数据的融合方面,叉车通常配备了多种传感器,如位置传感器、载重传感器、摄像头、激光雷达等。
这些传感器可以获取到叉车和周围环境的信息,如货物位置、障碍物位置等。
通过物体识别和目标检测算法,可以将传感器数据进行融合,实现对环境的全面感知,从而更好地规划和执行运动轨迹。
此外,基于机器学习的智能决策算法也是智能化控制系统的关键。
通过对历史数据的学习和分析,叉车可以根据不同工作场景进行智能决策。
例如,在不同的货物重量和堆放高度下,叉车可以自动调整提升速度和转弯半径,以提高工作效率和安全性。
另外,通过机器学习算法,叉车可以根据运行状态和环境变化来调整控制策略,实现自适应控制。
优化智能化控制系统的关键是提高叉车的性能和效率。
在设计过程中,需要考虑以下几个方面:动力系统优化、能量管理优化和路径规划优化。
对于动力系统优化,可以从电机控制、传动系统和驱动系统等方面进行优化。
例如,采用先进的电机控制算法,如矢量控制或无感传感器控制,可以提高电机的响应速度和转矩控制精度。
此外,优化传动系统的设计和参数选择,可以提高传动效率和叉车的动力输出。
叉车电气系统设计

叉车电气系统设计引言本文档旨在介绍叉车电气系统的设计,提供有关该系统的详细信息。
电气系统是叉车的重要组成部分,负责控制叉车的运行和操作。
本文档将涵盖叉车电气系统的主要部件和其功能。
电气系统组成叉车的电气系统主要由以下组件组成:1. 电动机:叉车的电动机负责驱动叉车的动力系统。
根据需要,叉车通常配备多个电动机,用于驱动不同的功能,如行驶、升降等。
2. 控制器:叉车的控制器是电气系统的"大脑",负责接收和处理来自操作者的指令,并相应地控制电动机的运行。
控制器还负责监测电气系统的状态,并在出现故障或异常情况时采取相应的纠正措施。
3. 电池:电池是叉车电气系统的动力源,为电动机提供所需的电能。
电池的容量和类型应根据叉车的使用情况和工作要求进行选择。
4. 传感器:叉车电气系统通常配备多种传感器,用于监测叉车的运动状态和环境参数。
这些传感器可以提供给控制器有关叉车位置、负载重量、倾斜角度等信息,以便控制器做出相应的调整和决策。
功能实现通过合理配置和设计叉车电气系统的各个部件,可以实现以下关键功能:1. 行驶控制:叉车电气系统通过控制电动机的运行,实现叉车的前后移动、转向等操作。
操作者可以通过操纵杆或按钮控制叉车的行驶速度和方向。
2. 升降控制:电气系统通过控制电动机的运行,实现货物的升降操作。
操作者可以通过操纵杆或按钮控制货叉的升降速度和高度,以适应不同场景和需求。
3. 稳定性控制:叉车电气系统通过传感器检测叉车的倾斜角度和负载重量,以及控制器的反馈控制,调整电动机的输出,保持叉车的稳定性和平衡性。
4. 安全保护:电气系统应具备相应的安全功能,如过载保护、过流保护和紧急制动等,以提供叉车操作的安全保障。
这些保护机制可由控制器根据传感器数据和设定的参数来实现。
小结本文档介绍了叉车电气系统的设计,包括其组成部分和实现的功能。
叉车电气系统的设计应根据叉车的使用需求和工作场景进行,以确保叉车的正常运行和安全操作。
一种电动叉车控制器[实用新型专利]
![一种电动叉车控制器[实用新型专利]](https://img.taocdn.com/s3/m/1d6783ae33687e21ae45a917.png)
专利名称:一种电动叉车控制器专利类型:实用新型专利
发明人:曾祥亮,卢新华
申请号:CN201921432108.2申请日:20190830
公开号:CN211813273U
公开日:
20201030
专利内容由知识产权出版社提供
摘要:本实用新型公开了一种电动叉车控制器,包括电源供电转换电路、MOS管全桥电路、MOS 管温度采集电路、一号引脚VIN、二号引脚SW、三号引脚GND、四号引脚FB、五号引脚EN、八号MOS管、控制B点、C点、D点、缓和曲线电路以及MOS管电机驱动电路,所述电源供电转换电路与MOS管全桥电路、MOS管温度采集电路以及MOS管电机驱动电路之间为电性连接并供电。
本实用新型所述的一种电动叉车控制器,设有宽电压输入电源设计、MOS管全桥电路控制与MOS管工作温度采集,能够可以很好的兼容多种电池电压的输入问题,还可以实现电机再生电刹车,使控制器在超载重量程容易烧管问题得到保护的可靠性,带来更好的使用前景。
申请人:珠海市讯特科技有限公司
地址:519000 广东省珠海市高新区唐家湾镇创新六路1号1栋四楼407室
国籍:CN
代理机构:苏州和氏璧知识产权代理事务所(普通合伙)
代理人:李晓星
更多信息请下载全文后查看。
交流驱动蓄电池叉车调速控制系统的设计

率较 低 ,体 积 和 质 量 大 ,且 直 流 电机 维 护保 养 较
困难 。随着 变 频 技 术 和 电力 电子 器 件 的 发 展 ,交 流驱动 的 蓄 电池 叉 车 的性 能 获 得 了 较 大 的 提 高 。
交流 电动 机 的转 矩表 达式 为
T3 en gr  ̄㈢ s ̄ p . O l R
cm i n espf qec ot l i pc et u ewd ouai ( V WM )tcnl y 8 / 0 A A o bn gt l r unycnr t saevc rp l it m d l o S P i h i e o wh o s h tn eh oo ,4 V 5 0 C g
s e d c n r l y tm aie h aib e fe u n y s e e ua in tr u h c re ta d rt t g s e o be lo o t l p e o t se r l z s te v ra l rq e c p d r g l t h o g u r n n ai p d d u l-o p c nr o s e e o o n e o s se y tm. T e e p rme t r v sta h y tm si x el n u n n h x ei n o e h t e s se i n e c l t n ig,o i h s e d r g lt g a c ; c n o d sa i t . p t e r fhg p e e u ai c u a y a d g o t l y n b i
结合的控制方法 ,通过 电流 、转速双 闭环控制 系统 实现 变频调 速 。实 验证 明该 系统运 行 良好 ,调 速精 度较 高 ,
电动叉车驱动控制器研究方案课件
驱动控制器作为电动叉车的核心 部件,对叉车的性能和稳定性具 有决定性影响。
研究目的和意义
针对现有电动叉车驱动控制器存在的 问题,提出改进方案,提高电动叉车 的性能和稳定性。
通过研究,为电动叉车驱动控制器的 设计和优化提供理论支持和实践指导 ,推动电动叉车技术的进步。
研究范围和限制
研究范围
本研究的重点在于电动叉车驱动 控制器的设计和优化,不涉及其 他相关领域。
高效化
研发更高效的电动叉车驱动控制器,提高电动叉车的运行效率和能 量利用率。
环保化
加强电动叉车驱动控制器的环保性能,降低能耗和排放,满足更严格 的环保标准。
谢谢观看
参数选择
在方案设计过程中,需要综合考虑电动叉车的负载能力、行驶速度、续航里程、安全性能等关键参数 ,以确保设计的控制器能够满足实际应用要求。
设计实现和实验验证
01
02
03
硬件设计
根据设计方案,需要选择 合适的电子元器件和电路 板,进行硬件电路设计和 制作。
软件编程
根据控制需求,编写控制 算法和程序,实现电动叉 车的驱动控制。
电动叉车驱动控制器研究方案
目录
• 引言 • 电动叉车驱动控制器概述 • 电动叉车驱动控制器研究方案 • 电动叉车驱动控制器关键技术分析 • 电动叉车驱动控制器设计实例 • 电动叉车驱动控制器应用前景和市场分析
01
引言
研究背景
01
电动叉车在物流、仓储和制造业 中的应用日益广泛,对提高工作 效率和降低能耗具有重要意义。
能量回收等。
能量回收控制策略
02
制定能量回收的控制策略,包括能量回收的触发条件、能量回
收的程度和能量回收的效率等。
煤矿井下电动车自动化驱动控制器的电路设计
放电型 RCD 缓冲回路和放电阻止型缓冲回路 3 种类型。从实际 矿井下工作人员的安全。因此实时监测电动车的温度参数是十
应用效果来看,RC 缓冲回路的电路结构比较简单,但是需要 分必要的。该文设计的温度检测电路选用 TI 公司研发的 XTR500
使用大容量的 IGBT,造价较高,增加了成本 ;充放电型 RCD 电流发送器作为核心元件,电阻变化量为 0.4Ω/℃,具有便于安
缓冲回路的吸收能力较强,但是缓冲电阻的损耗较大,在高频 装、准确度高等特点。温度检测电路如图 5 所示。
开关中很少使用 ;放电阻止型缓冲回路在抑制浪涌电压方面
如图 5 所示,系统输出的电压信号先进入一个滤波电路
有明显优势,并且基本没有损耗。因此该文设计驱动控制器时
L1
选择放电阻止型缓冲回路 [2],其结构如图 4 所示。
设计缓冲吸收回路时,吸收电容优先考虑无感电容,其目 的是在最大程度上降低吸收电容工作期间产生的寄生电感。 同时,吸收电容的引线必须尽可能短,以保证 IGBT 的集电极
D0
R0
T1
电流较小,防止出现过高的感应电压。 2.5 检测电路
C0
L3
T2
为了掌握驱动控制器的各项参数,该文设计了检测电路,
可以利用前端多种类型的传感器实时采集并反馈各项参数,
R1
R2 R4
R3 R5
IR2 IR1 VLIN VIN+ RG RG VIN一 IRET
VREG V+ B IO NC
OUT1 Q11
C17
OUT2
C18
注:R1~R5为热敏电阻;C17、C18为低频旁路电容;Q11为NPN型三极管;OUT1、OUT2分别为电路输出。 图 5 温度检测电路图
基于控制器的叉车电气控制系统

基于控制器的叉车电气控制系统摘要:本文对控制器的控制原理、输入输出关系进行了分析。
通过研究智能无人叉车(AGV)电控系统硬件系统和软件系统的设计要点,旨在细化系统的设计内容,提高叉车电控系统的工作安全性。
关键词:控制器;智能无人叉车(AGV);电气控制系统引言目前,智能无人叉车(AGV)是非常重要的一部分,行业对叉车的安全要求也在不断提高。
结合控制器的应用优势,对电气控制系统进行优化,不仅可以优化系统的工作性能,对于提高问题发现的及时性也有积极的意义。
1控制器相关内容概述1.1模糊控制概述模糊控制是一种基于语言规则和模糊推理的先进控制技术。
模糊控制包括模糊处理、模糊推理和解模糊化。
模糊化是将模糊控制器输入的确定值转化为相应的模糊语言变量值的过程,模糊语言变量值由相应的隶属度定义。
基于已知的规则库和输入变量,基于模糊变换推导出一个新的模糊命题作为结论的过程称为模糊推理。
澄清是将模糊推理得到的模糊集转换成数字值以便控制的过程。
1.2投入与产出的关系分析为了提高控制器的应用效果,在具体应用中,有必要对结构输入输出关系进行详细分析。
在实际应用中,可以利用MATLAB的模糊控制工具箱来检查模糊控制器的输入输出关系。
在应用中,需要建立一个包括加速度误差E、加速度误差变化量ec和一个输出PWM 偏移量U两个输入的模糊控制系统,然后完成对输入加速度误差E、加速度误差变化量ec 和输出PWM偏移量U的模糊处理,以提高关系评价的合理性。
2智能无人叉车(AGV)电控系统的设计要点2.1硬件系统控制设计2.1.1最低系统设计在设计电气控制系统时,需要注意最小系统的设计。
基于以往的设计经验,在具体应用中需要注意以下内容:(1)时钟电路设计。
考虑到结构内部将安装一个片上振荡器,EXTAL将用于完成输入频率调整,应时晶体振荡器将用于形成稳定的时钟电路。
(2)一般情况下,BDM接口电路会使用BDM调试工具来完成程序运行和调试,具体连接电路需要根据需要进行铺设。