Q系列CPU的选择
三菱Q系列以太网接口模块

OPEN 则关闭远程 STOP 处的通讯线路 关闭后 再也不能在 PLC CPU 端重新断开通讯线 路 并且无法从外部设备起动远程 RUN
1 概述
1- 1 至 1- 4
1.1 概述.......................................................................................................................................................... 1- 1
• 通过把外围设备连接到 CPU 模块或把个人计算机连接到智能功能模块来控制正在运行的 PLC 修改数据 要在顺控程序中配置互锁电路 以确保整个系统的安全 另外 在正在运行的
PLC 上进行其它控制操作 修改程序和运行状态 状态控制 之前 一定要仔细阅读本手册 并且要确认绝对安全
尤其在从外围设备对远程 PLC 进行上述控制操作中 由于异常数据通讯 PLC 端的所有问题都 可能得不到及时处理 除了要在顺控程序中配置互锁电路之外 还要确定系统怎样处理对方设备 和 PLC CPU 之间的数据通讯异常性
4.4.4 代理服务器设置.............................................................................................................................. 4- 13
4.5 样例屏幕上文件的配置.......................................................................................................................... 4- 15
笔记本选Q9000还是X9100- q9000和x9100区别对比

CPU内核
核心代号:Penryn
核心数量:四核心
线程数:四线程
制作工艺:45纳米
热设计功耗(TDP):45W
内核电压:1.05-1.175V
晶体管数量:41百万
核心面积:107平方毫米
CPU缓存
二级缓存:6MB
技术参数
超线程技术:不支持
虚拟化技术:Intel VT
64位处理器:是
Turbo Boost技术:不支持
笔记本选Q9000还是X9100? q9000和x9100区别对比
本文主要是关于Q9000和X9100的相关介绍,并着重对Q9000ຫໍສະໝຸດ X9100的性能参数进行了详尽的阐述。
Q9000重要参数
核心代号:Penryn
热设计功耗(TDP):45W
总线类型:FSB总线1066MHz
适用类型:笔记本
倍频:7.5倍
内核电压:1.05-1.175V
Intel酷睿2四核Q9000详细参数切换到传统表格版
基本参数
适用类型:笔记本
CPU系列:酷睿2四核Q9000(移动版)
CPU频率
CPU主频:2GHz
外频:266MHz
倍频:7.5倍
总线类型:FSB总线
总线频率:1066MHz
CPU插槽
插槽类型:LGA 775
针脚数目:775pin
价格应该相差在1100块钱,我也是从镭波RABOOK上对比出来的楼主又可以自己去看看,他们官网上还有QX9300的至尊四核。
结语关于q9000和x9100的相关介绍就到这了,如有不足之处欢迎指正。
相关阅读推荐:如何制作一个CPU呢?
相关阅读推荐:cpu内部结构显微图/cpu内部结构放大图
q8300 cpu介绍
q8300 cpu介绍q8300 cpu介绍一还可以。
现在2016年了,用win7系统的,不说什么游戏,还带3d的,用这些二代ddr2加775针的cpu 怎么玩,就那种浏览器的多支持不了了,像360浏览器就貌似有些网站的占用资源很大,尤其是广告贴特多的网站动不动90%以上cpu占用。
像e7(7200 7300 7400 7500 7600)系列的现在来看是连最基础的运用多支持不了了,e8(8400 8500 8600)系列的勉强维持使用q8四核系列的在处理多线程任务时要出色,个人感觉在日常使用之下,q8300要比e8400要稍出色,两款分别在同个主板平台上用过。
q8300相比e8400在发热方面也差不多,甚至还要低,还行吧,网购二手的q8300 130元,e8400才50元,自然是有一些优势理由的吧。
q8300 cpu介绍二pcmark vantage在测试中,基于酷睿2四核q8300的平台得到了4080分的总成绩,另外,由于q8300拥有1333mhz前端总线,内存性能也可以得到更好的发挥,可以看到pcmark的内存单项测试成绩也令人满意。
3dmark vantage测试,通过模拟gpu渲染和physx物理运算来测试处理器性能,q8300在处理器测试中得到了9348分。
superpi是通过计算圆周率来测试处理器性能的软件,它只支持单核运算,酷睿2四核q8300离20秒大关仅一步之遥。
superpi是通过计算圆周率来测试处理器性能的软件,它只支持单核运算,酷睿2四核q8300离20秒大关仅一步之遥。
对于intel酷睿2四核q8300而言多线程应用无疑是其最大优势,它延续了intel酷睿2架构处理器高执行效率和低功耗的特点,对于平面设计、3d设计、视频剪辑以及后期处理这类应用,cpu的多线程处理能力非常重要,经济型四核q8300则总共拥有4m二级缓存,每两个核心共享2m二级缓存,在单线程应用方面表现并没有e8000系列双核出色,q8000系列四核依靠更多核心来换取多线程应用性能的成倍提升。
三菱Q系列PLC网络参数设置方法及注意事项
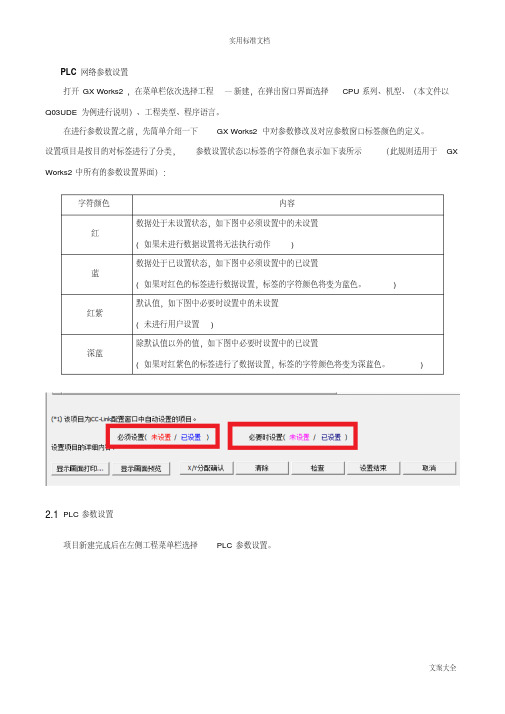
三菱Q系列PLC⽹络参数设置⽅法及注意事项PLC⽹络参数设置打开GX Works2,在菜单栏依次选择⼯程—新建,在弹出窗⼝界⾯选择CPU系列、机型、(本⽂件以Q03UDE为例进⾏说明)、⼯程类型、程序语⾔。
在进⾏参数设置之前,先简单介绍⼀下GX Works2中对参数修改及对应参数窗⼝标签颜⾊的定义。
设置项⽬是按⽬的对标签进⾏了分类,参数设置状态以标签的字符颜⾊表⽰如下表所⽰(此规则适⽤于GX Works2中所有的参数设置界⾯):字符颜⾊内容数据处于未设置状态,如下图中必须设置中的未设置红( 如果未进⾏数据设置将⽆法执⾏动作)数据处于已设置状态,如下图中必须设置中的已设置蓝( 如果对红⾊的标签进⾏数据设置,标签的字符颜⾊将变为蓝⾊。
)默认值,如下图中必要时设置中的未设置红紫( 未进⾏⽤户设置)除默认值以外的值,如下图中必要时设置中的已设置深蓝( 如果对红紫⾊的标签进⾏了数据设置,标签的字符颜⾊将变为深蓝⾊。
)2.1PLC参数设置项⽬新建完成后在左侧⼯程菜单栏选择PLC参数设置。
5.1.1软元件设置在PLC参数设置界⾯⾸先选择软元件设置,软元件的默认参数如下图所⽰。
其中软元件点数的⽩⾊部分可⼿动修改,灰⾊部分不可修改。
可根据项⽬需求进⾏软元件点数的修改,但需注意软元件合计字节不可超过CPU的上限。
5.1.2PLC系统设置PLC的系统设置常⽤的包括通⽤指针号、空插槽点数、远程复位。
a)通⽤指针号:对程序中使⽤的通⽤指针的起始No. 进⾏设置(仅基本型QCPU不能设置)。
设置范围0~4095;指针(P)应⽤于主程序中的⼦程序,⼦程序是从指针(P )开始⾄RET 指令为⽌的程序,创建于FEND指令~END 指令,仅在从主程序内通过CALL(P)、FCALL(P)指令等调⽤的情况下才被执⾏。
⼦程序应在下述⽤途中使⽤:将1个扫描中多次执⾏的程序汇集为⼦程序,减少整体步数的情况下;将仅在某个条件下才执⾏的程序设置为⼦程序,以缩短相应扫描时间的情况下之间。
q系列选型
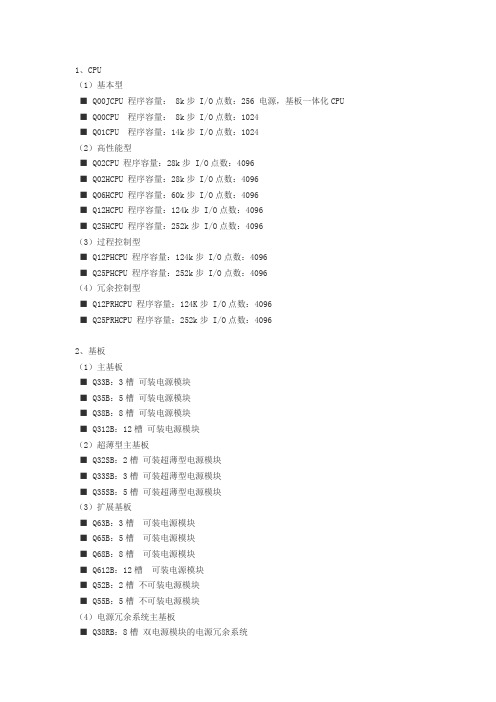
1、CPU(1)基本型■ Q00JCPU 程序容量: 8k步 I/O点数:256 电源,基板一体化CPU ■ Q00CPU 程序容量: 8k步 I/O点数:1024■ Q01CPU 程序容量:14k步 I/O点数:1024(2)高性能型■ Q02CPU 程序容量:28k步 I/O点数:4096■ Q02HCPU 程序容量:28k步 I/O点数:4096■ Q06HCPU 程序容量:60k步 I/O点数:4096■ Q12HCPU 程序容量:124k步 I/O点数:4096■ Q25HCPU 程序容量:252k步 I/O点数:4096(3)过程控制型■ Q12PHCPU 程序容量:124k步 I/O点数:4096■ Q25PHCPU 程序容量:252k步 I/O点数:4096(4)冗余控制型■ Q12PRHCPU 程序容量:124K步 I/O点数:4096■ Q25PRHCPU 程序容量:252k步 I/O点数:40962、基板(1)主基板■ Q33B:3槽可装电源模块■ Q35B:5槽可装电源模块■ Q38B:8槽可装电源模块■ Q312B:12槽可装电源模块(2)超薄型主基板■ Q32SB:2槽可装超薄型电源模块■ Q33SB:3槽可装超薄型电源模块■ Q35SB:5槽可装超薄型电源模块(3)扩展基板■ Q63B:3槽可装电源模块■ Q65B:5槽可装电源模块■ Q68B:8槽可装电源模块■ Q612B:12槽可装电源模块■ Q52B:2槽不可装电源模块■ Q55B:5槽不可装电源模块(4)电源冗余系统主基板■ Q38RB:8槽双电源模块的电源冗余系统(5)电源冗余系统扩展基板■ Q68RB:8槽双电源模块的电源冗余系统3、电源模块(1)普通电源模块■ Q61P■ Q62P■ Q63P■ Q64P(2)超薄型电源模块■ Q61SP4、4、数字量模块(1)数字量输入模块■ QX10:16点■ QX28:8点■ QX40:16点■ QX40-S1:16点■ QX41:32点■ QX41-S1:32点■ QX42:64点■ QX42-S1:64点■ QX70:16点■ QX71:32点■ QX72:64点■ QX80:16点■ QX81:32点■ QX82:64点■ QX82-S1:32点(2)数字量输出模块■ QY10 16点继电器输出■ QY18A 8点独立继电器输出■ QY22 16点■ QY40P 16点■ QY41P 32点■ QY42P 64点■ QY50:16点■ QY68A 8点■ QY70 16点■ QY71 32点■ QY80 16点■ QY81P 32点■ QH42P:64点■ QX48Y57:15点(4)数字量中断型输入模块■ QI60 16点5、模拟量模块(1)模拟量输入模块■ Q68ADV 8通道■ Q62AD-DGH 通道隔离 2通道,电流输入■ Q68ADI 8通道■ Q64AD 4通道■ Q64AD-GH 通道隔离 4通道(2)模拟量输出模块■ Q68DAV 8通道■ Q68DAI 8通道■ Q62DA 2通道■ Q62DA-FG ■ Q64DA 4通道(3)温度输入模块■ Q64RD 4通道,铂电阻温度传感器输入■ Q64RD-G 通道隔离 4通道,铂电阻温度传感器输入■ Q64TD 4通道,热电偶输入■ Q64TDV-GH 通道隔离 4通道,热电偶输入(4)温度调节模块■ Q64TCRT 铂电阻温度传感器输入-晶体管输出■ Q64TCRTBW 带断路探测功能的铂电阻温度传感器输入-晶体管输出■ Q64TCTT 热电偶输入-晶体管输出■ Q64TCTTBW 带断路探测功能的热电偶输入-晶体管输出6、脉冲输入模块(1)高速计数模块■ QD62 2通道,200Kpps,DC5/12/24V输入,漏型晶体管输出■ QD62D 2通道,500Kpps,差动输入,漏型晶体管输出■ QD62E 2通道,200Kpps,DC5/12/24V输入,源型晶体管输出(2)通道间隔离脉冲输入模块■ QD60P8-G 通道隔离脉冲输入模块 8通道,DC5/12~24V输入7、定位模块(1)QD70系列■ QD70P4 4轴开路集电极输出型■ QD70P8 8轴开路集电极输出型(2)QD75系列■ QD75P1 控制1个轴开集电极脉冲输处■ QD75P2 控制2个轴开集电极脉冲输处■ QD75P4 控制4个轴开集电极脉冲输处■ QD75D1 控制1个轴差动驱动脉冲输处■ QD75D2 控制2个轴差动驱动脉冲输处■ QD75D4 控制4个轴差动驱动脉冲输处■ QD75M1 控制1个轴 SSCNET高速总线连接型■ QD75M2 控制2个轴 SSCNET高速总线连接型■ QD75M4 控制4个轴 SSCNET高速总线连接型8、网络模块(1)以太网模块■ QJ71E71-100 用于10 BASE-5/10 BASE-T■ QJ71E71-B2 用于10 BASE-2■ QJ71E71-B5 用于10 BASE-T/100 BASE-TX(2)PROFIBUS-DP模块■ QJ71PB92D Profibus 主站模块■ QJ71PB93D Profibus 从站模块(3)CCLINK模块■ QJ61BT11N 主站/本地站■ Q80BDE-J61BT11 人计算机用的CC-Link板主站/本地站■ Q80BDE-J61BT13 人计算机用的CC-Link板本地站(4)CCLINK/LT模块■ QJ61CL12 主站。
三菱Q系列PLC网络全参数设置方法及注意事项

PLC网络参数设置打开GX Works2,在菜单栏依次选择工程—新建,在弹出窗口界面选择CPU系列、机型、(本文件以Q03UDE为例进行说明)、工程类型、程序语言。
在进行参数设置之前,先简单介绍一下GX Works2中对参数修改及对应参数窗口标签颜色的定义。
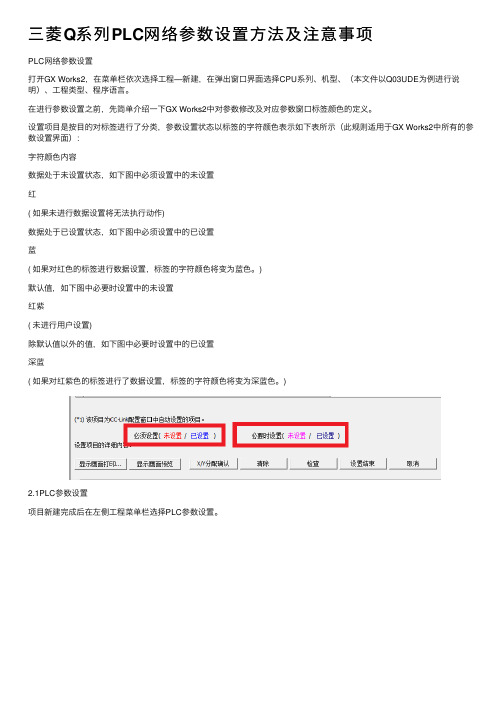
设置项目是按目的对标签进行了分类,参数设置状态以标签的字符颜色表示如下表所示(此规则适用于GX Works2中所有的参数设置界面):字符颜色内容数据处于未设置状态,如下图中必须设置中的未设置红( 如果未进行数据设置将无法执行动作)数据处于已设置状态,如下图中必须设置中的已设置蓝( 如果对红色的标签进行数据设置,标签的字符颜色将变为蓝色。
)默认值,如下图中必要时设置中的未设置红紫( 未进行用户设置)除默认值以外的值,如下图中必要时设置中的已设置深蓝( 如果对红紫色的标签进行了数据设置,标签的字符颜色将变为深蓝色。
)2.1PLC参数设置项目新建完成后在左侧工程菜单栏选择PLC参数设置。
5.1.1软元件设置在PLC参数设置界面首先选择软元件设置,软元件的默认参数如下图所示。
其中软元件点数的白色部分可手动修改,灰色部分不可修改。
可根据项目需求进行软元件点数的修改,但需注意软元件合计字节不可超过CPU的上限。
5.1.2PLC系统设置PLC的系统设置常用的包括通用指针号、空插槽点数、远程复位。
a)通用指针号:对程序中使用的通用指针的起始No. 进行设置(仅基本型QCPU不能设置)。
设置范围0~4095;指针(P)应用于主程序中的子程序,子程序是从指针(P )开始至RET 指令为止的程序,创建于FEND指令~END 指令,仅在从主程序内通过CALL(P)、FCALL(P)指令等调用的情况下才被执行。
子程序应在下述用途中使用:将1个扫描中多次执行的程序汇集为子程序,减少整体步数的情况下;将仅在某个条件下才执行的程序设置为子程序,以缩短相应扫描时间的情况下之间。
q8300cpu怎么样
q8300cpu怎么样q8300这款cpu有没有朋友用过呢?没有就跟着小编一起器看看吧!下面由店铺给你做出详细的q8300cpu介绍!希望对你有帮助!q8300cpu介绍一Q8300是2008年的cpu。
基本参数:适用类型:台式机CPU系列:酷睿2四核 Q8000CPU主频:2.5GHz制作工艺:45纳米晶体管数量:456百万插槽类型:LGA 775针脚数目:775pin核心数量:四核心线程数:四线程q8300cpu介绍二从性价比和实用性角度上来说,配P45就可以了。
介绍下Intel P45主板参数信息:标准南桥:82801JIB(ICH10)或82801JIR(ICH10R);CPU类型:Celeron Dual-Core、Pentium Dual-Core、Core 2 Duo、Core 2 Quad、Core 2 Extreme;CPU插槽:Socket775;CPU数量:1颗;总线规格:800/1066/1333MHz;超线程技术:支持;内存类型:支持DDR2/DDR3;IDE接口:不支持;SATA接口:支持6个SATA II接口;CPU插槽:LGA775;USB接口:支持12个USB2.0接口;总线规格:800/1066/1333MHz。
q8300cpu介绍三240怎么能和Q8300比,最少也要找个AMD奕龙925啊!价格差别不止一般,性能不能比,240是没办法开核的,二楼别瞎说,能开的是速龙二 5000和三核心产品主板华硕P5QL SE 怎么能选择这样一个主板呢还不如找个七彩虹的P45,价格更低,性能强大得多,品牌这个东西,不可不信,也不可尽信8800GTS/9800GTS/GTS250这几个东东都是G92核心而已,差别不过是工艺,性能差别好小的,这个年头260才是值得购买的,不然你去淘宝淘个96个流处理器的9600GSO性能堪比8800GS,不过不容易找就是----后来的9600GSO都被阉割掉一半流处理器了,才几百块多便宜,要么就真的选择GTX260,这个才算NV这两年真正的进步,其实NV现在显卡真的不行了,选个AMD的5850免除后顾之忧。
三菱Q系列PLC网络全参数设置方法及注意事项
PLC网络参数设置打开GX Works2,在菜单栏依次选择工程—新建,在弹出窗口界面选择CPU系列、机型、(本文件以Q03UDE为例进行说明)、工程类型、程序语言。
在进行参数设置之前,先简单介绍一下GX Works2中对参数修改及对应参数窗口标签颜色的定义。
设置项目是按目的对标签进行了分类,参数设置状态以标签的字符颜色表示如下表所示(此规则适用于GX Works2中所有的参数设置界面):字符颜色内容数据处于未设置状态,如下图中必须设置中的未设置红( 如果未进行数据设置将无法执行动作)数据处于已设置状态,如下图中必须设置中的已设置蓝( 如果对红色的标签进行数据设置,标签的字符颜色将变为蓝色。
)默认值,如下图中必要时设置中的未设置红紫( 未进行用户设置)除默认值以外的值,如下图中必要时设置中的已设置深蓝( 如果对红紫色的标签进行了数据设置,标签的字符颜色将变为深蓝色。
)2.1PLC参数设置项目新建完成后在左侧工程菜单栏选择PLC参数设置。
5.1.1软元件设置在PLC参数设置界面首先选择软元件设置,软元件的默认参数如下图所示。
其中软元件点数的白色部分可手动修改,灰色部分不可修改。
可根据项目需求进行软元件点数的修改,但需注意软元件合计字节不可超过CPU的上限。
5.1.2PLC系统设置PLC的系统设置常用的包括通用指针号、空插槽点数、远程复位。
a)通用指针号:对程序中使用的通用指针的起始No. 进行设置(仅基本型QCPU不能设置)。
设置范围0~4095;指针(P)应用于主程序中的子程序,子程序是从指针(P )开始至RET 指令为止的程序,创建于FEND指令~END 指令,仅在从主程序内通过CALL(P)、FCALL(P)指令等调用的情况下才被执行。
子程序应在下述用途中使用:将1个扫描中多次执行的程序汇集为子程序,减少整体步数的情况下;将仅在某个条件下才执行的程序设置为子程序,以缩短相应扫描时间的情况下之间。
mit_qcpu_zh-CHS

Mitsubishi Electric CorporationQ Series CPUDirect 驱动程序1系统配置 (3)2选择外接控制器 (6)3通讯设置示例 (7)4设置项目 (8)5电缆接线图 (11)6支持的元件 (12)7元件代码和地址代码 (15)8错误消息 (20)概述本手册介绍如何连接人机界面和外接控制器(目标PLC)。
在本手册中,将按以下章节顺序介绍连接过程:1系统配置)"1 系统配置" (第3页)本节介绍可连接的外接控制器类型和串口类型。
2选择外接控制器)"2 选择外接控制器" (第6页)选择要连接的外接控制器的类型(系列)以及连接方法。
3通讯设置示例)"3 通讯设置示例" (第7页)本节给出连接人机界面和外接控制器的设置示例。
4设置项目)"4 设置项目" (第8页)本节介绍人机界面上的通讯设置项目。
请使用GP-Pro EX或在离线模式下进行人机界面的通讯设置。
5电缆接线图)"5 电缆接线图" (第11页)本节介绍用于连接人机界面和外接控制器的电缆和适配器。
操作1系统配置本节给出三菱电机的外接控制器和人机界面连接时的系统配置。
连接配置•单CPU 系统•多CPU 系统系列CPU连接接口串口类型设置示例电缆接线图MELSEC Q系列Q02CPUQ02HCPU Q06HCPU Q12HCPU Q25HCPU CPU 直连RS-232C设置示例1 (第7页)电缆接线图1 (第11页)Q172HCPU高性能机型Q CPU 上的RS-232C 端口*1*1由于不能将运动CPU 直接连接到人机界面,所以请将其用于多CPU 系统。
•请在2号至4号的范围内使用运动CPU 。
不能在1号上使用运动CPU 。
外接控制器号IPC 的COM 端口当连接IPC 和外接控制器时,可使用的COM 端口因系列和串口类型而有所不同。
CPU - Q 选型

型号规格说明[CPU - Q 模式]Q00JCPU CPU, 程序: 8K步Q00CPU CPU, 程序: 8K步Q01CPU CPU, 程序: 14K步Q02CPU CPU, 程序: 28K步Q02HCPU CPU, 程序: 28K步, 高速Q06HCPU CPU, 程序: 60K步, 高速Q12HCPU CPU, 程序: 124K步, 高速Q25HCPU CPU, 程序: 252K步, 高速[CPU - 过程CPU模块]Q12PHCPU CPU, 程序: 124K 步, 过程CPUQ25PHCPU CPU, 程序: 252K 步, 过程CPU[主基板,扩展基板]Q33B 电源+ CPU + 3 槽用于Q 系列I/O, CE/UL/cULQ35B 电源+ CPU + 5 槽用于Q 系列I/O, CE/UL/cULQ38B 电源+ CPU + 8 槽用于Q 系列I/O, CE/UL/cULQ312B 电源+ CPU + 12 槽用于Q 系列I/O, CE/UL/cUL Q63B 电源+ 3 I/O 槽, 用于Q 系列, CE/UL/cULQ65B 电源+ 5 I/O 槽, 用于Q 系列, CE/UL/cULQ68B 电源+ 8 I/O 槽, 用于Q 系列, CE/UL/cULQ612B 电源+ 12 I/O 槽, 用于Q 系列, CE/UL/cULQ52B 2 I/O 槽, 用于Q 系列(不需要电源)Q55B 5 I/O 槽, 用于Q 系列(不需要电源)-[电源]Q61P-A1 100-120VAC 输入/5VDC 6A 输出, CE/UL/cULQ61P-A2 200-240VAC 输入/5VDC 6A 输出, CE/UL/cULQ62P 100-240VAC 输入/5VDC 3A, 24VDC/0.6A 输出Q63P 24VDC 输入/5VDC 6A 输出Q64P 100-120/200-240VAC 输入/5VDC 8.5A 输出[扩展电缆]QC05B 0.45米(1.48ft.)QC06B 0.6米(1.96ft.)QC12B 1.2米(3.93ft.)QC30B 3米(9.84ft.)QC50B 5米(16.4ft.)QC100B 10米(32.8ft.)[电池]Q6BAT 更换用电池[适配器]Q6DIN1 安装DIN导轨用适配器, 用于Q38B/Q312B/Q68B/Q612BQ6DIN2 安装DIN导轨用适配器, 用于Q35B/Q65BQ6DIN3 安装DIN导轨用适配器, 用于Q33B/Q63B[内存卡]Q2MEM-1MBS SRAM 内存卡容量: 1MBQ2MEM-2MBS SRAM 内存卡容量: 2MBQ2MEM-2MBF LINEAR FLASH 内存卡容量: 2MBQ2MEM-4MBF LINEAR FLASH 内存卡容量: 4MBQ2MEM-8MBA ATA卡容量: 8MBQ2M2M-16MBA ATA卡容量: 16MBQ2MEM-32MBA ATA卡容量: 32MB[SRAM卡电池]Q2MEM-BAT 更换用电池, 用于Q2MEM-1MBS[软件]GX-DEVELOPER-E 编程软件, WINDOW版(GPPW/LLT)- ENG.GX-DEVELOPER-C 编程软件, WINDOW版(GPPW/LLT)- CHIN.GX-CONFIG. - AD AD模块设置工具用于Q PLC - ENG.GX-CONFIG. - DA DA模块设置工具用于Q PLC - ENG.GX-CONFIG. - CT 高速计数器模块设置工具用于Q-PLC - ENG.GX-CONFIG. - TC 温度控制模块设置工具用于Q-PLC - ENG.GX-CONFIG. - FL FL-NET模块设置工具用于Q-PLC - ENG.GX-CONFIG. - PT QD70P 定位模块设置工具用于Q-PLC - ENG.GX-CONFIG. - QP QD75P/D/M 定位模块设置工具用于Q-PLC - ENG. GX-CONFIG. - SC 串行口通讯模块设置工具- ENG.MX COMPONENT ACTIVE X库用于通讯- ENG. MX LINK - E DDL库用于通讯(ENG.)[输入模块]QX10 100-120VAC/7-8mA, 16点QX28 240VAC, 8点QX40 240VAC/4mA, 正极共同端输入, 16点QX40-S1 24VDC, 正极共同端输入, 16点(高速)QX41 24VDC, 正极共同端输入, 32点QX41-S1 24VDC, 正极共同端高速输入, 32点QX42 24VDC, 正极共同端输入, 64点QX42-S1 24VDC, 正极共同端高速输入, 64点QX70 5-12VDC 输入, 正负极共同端输入, 16点QX71 5-12VDC 输入, 正负极共同端输入, 32点QX72 5-12VDC 输入, 正负极共同端输入, 64点QX80 24VDC/4mA. 负极共同端输入, 16点, 端子台QX81 24VDC/4mA. 负极共同端输入, 16点, 连接器[输出模块]QY10 240VAC/24VAC, 16点, 不带保险丝QY18A 240VAC/24VAC, 2A, 8点独立输出QY22 240VAC/0.6A, 16点, 不带保险丝QY40P 12/24VDC, 16点, 带短路保护QY41P 12/24VDC, 32点, 带短路保护QY42P 12/24VDC, 64点, 带短路保护QY50 12/24VDC, 16点, 带保险丝QY68A 5-24VDC, 8点, 不带保险丝QY70 5/12VDC, 16点, 不带保险丝QY71 5/12VDC, 32点, 不带保险丝QY80 12/24VDC, 16点, 不带保险丝QY81P 12/24VDC, 32点, 带短路保护[I/O 组件模块]QH42P 24VDC 正极共同端输入, 32点, 输出: 32点QX48Y57 24VDC 正极共同端输入, 8点, 输出: 7点[I/O 连接器]A6CON1 焊接用32-点连接插头A6CON2 压接端子用32-点连接插头A6CON3 热压端子用32-点连接插头A6CON1E 焊接用32-点连接插头A6CON2E 压接端子用32-点连接插头A6CON3E 热压端子用32-点连接插头[中断模块]QI60 16点, 响应时间: 0FF-ON 0.2ms, ON-OFF 0.3ms 或更少[模拟模块]Q64AD 4 通道, A/D 转换器: 电压/电流输入Q68ADV 8 通道, A/D 转换器: 电压输入Q68ADI 8 通道, A/D 转换器: 电流输入Q62DA 2 通道, D/A 转换器: 电压/电流输出Q64DA 4 通道, D/A 转换器: 电压/电流输出Q68DAV 8 通道, D/A 转换器: 电压输出Q68DAI 8 通道, D/A 转换器: 电流输出[独立通道模拟模块]Q64AD-GH 4 通道, A/D 转换器: 电压/电流输入Q62AD-DGH 2 通道, A/D 转换器, SIGNAL CONDITIONING FUNCTION Q62DA-FG 2 通道, D/A 转换器: V/I 带显示输出[温控输入/控制模块]Q64RD 4 通道, 铂电阻. 热电阻输入Q64TCTT 热电偶输入-晶体管输出Q64TCTTBW 热电偶输入带短路保护Q64TCRT 铂电阻. 热电阻输入Q64TCRTBW 铂电阻输入带短路保护[独立通道温度输入模块]Q64TD 4 通道, 热电偶输入Q64TDV-GH 4 通道, 热电偶输入, 弱电输入[高速计数器]QD62 QD62D QD62E 2 通道, 200kpps, 5/12/24VDC 输入, 漏型晶体管输出2 通道, 500kpps, 独立输入, 漏型晶体管输出 2 通道, 200kpps, 5/12/24VDC 输入, 源型晶体管输出[独立通道脉冲输入模块]QD60P8-G 8 通道, 5/12 TO 24VDC 输入, INPUT FILTER SETTING[定位模块]QD75P1 1 轴, 集电极开路输出QD75P2 2 轴, 集电极开路输出QD75P4 4 轴, 集电极开路输出QD75D1 1 轴, 差动输出QD75D2 2 轴, 差动输出QD75D4 4 轴, 差动输出QD75M1 1 轴SSCNET COMPATIBLEQD75M2 2 轴SSCNET COMPATIBLEQD75M4 4 轴SSCNET COMPATIBLEQD70P4 4 轴脉冲输出QD70P8 8 轴脉冲输出[空盖板]QG60 空盖板用于I/O 槽[连接电缆]QC30R2 RS-232电缆用于连接PC 和PLC CPU[端子台适配器]Q6TA32 用于32-点I/O, 0.5MM2 (AWG20)[端子台适配器专用工具]Q6TA32-TOL 端子台适配器工具专用于Q6TA32[网络与通讯]QJ71E71-B2 以太网模块用于10BASE-2QJ71E71-B5 以太网模块用于10BASE-5QJ71E71-100 以太网模块用于10BASE-T/10BASE-TXQJ71LP21-25 MELSECNET/10H模块用于SI/QSI 光缆, 双环QJ71LP21G MELSECNET/10H模块用于50GI 光缆, 双环QJ71LP21GE MELSECNET/10H模块用于62.5GI 光缆, 双环QJ72LP25-25 MELSECNET/10H模块用于DISTANCE SI/QSI 光缆QJ72LP25G MELSECNET/10H模块用于DISTANCE 50GI 光缆QJ72LP25GE MELSECNET/10H模块用于DISTANCE 62.5GI 光缆QJ71BR11 MELSECNET/10H模块用于同轴电缆, 单总线QJ72BR15 MELSECNET/10H模块用于远程同DISTANCE COAXIAL 75 CABLE Q80BD-J71LP21-25 MELSECNET/10H模块用于光缆Q80BD-J71LP21G MELSECNET/10H模块用于SI/QSI/H-PC 光缆Q80BD-J71BR11 MELSECNET/10H模块用于同轴电缆QJ61BT11 CC-LINK 模块用于主站/本地站QJ71C24 串行口通讯模块用于RS232C 1通道, RS422/485 1通道QJ71C24-R2 串行口通讯模块用于RS232C 2通道QJ71CMO RS-232 1通道QD51 智能通讯模块用于RS-232 2通道QD51-R24 智能通讯模块用于RS-232 1通道, RS422/485 1通道SW1IVD-AD51HP QD51软件包QJ71FL71 FL-NETWORK模块用于10BASE-5/10BASE-TQJ71FL71-B2 FL-NETWORK模块用于10BASE-2[扩展基板]QA1S65B 电源+5 -I/O 槽, 用于安装AnS系列模块QA1S68B 电源+8 -I/O 槽, 用于安装AnS系列模块QA65B 电源+5 -I/O 槽, 用于安装A系列模块[CPU - A 模式]Q02CPU-A Q02HCPU-A Q06HCPU-A 程序容量: 28K步程序容量: 28K步(高速)程序容量: 60K步(高速)[内存卡盒]Q2MEM-1MBS SRAM内存卡, 容量: 1MB[主基板, 扩展基板]QA1S33B 电源+ CPU + 3 I/O 槽用于安装AnS模块QA1S35B 电源+ CPU + 5 I/O 槽用于安装AnS模块QA1S38B 电源+ CPU + 8 I/O 槽用于安装AnS模块QA1S65B 电源+ 5 I/O 槽用于安装AnS模块QA1S68B 电源+ 8 I/O 槽用于安装AnS模块[扩展电缆]QC06B 0.6m (1.97ft.)QC12B 1.2m (3.93ft.)QC30B 3m (9.84ft.)QC50B 5m (16.39ft.)QC100B 10m (32.79ft.)A32RB Q4AR DUAL SYS. BASE, 2 I/O 槽A33RB Q4AR DUAL SYS. BASE, 3 I/O 槽A37RHB Q4AR/QnA BASE, 7 I/O, , 2 POWER, 1 CPU 槽A68RB Q4AR/QnA EBASE, 7 I/O, , 2 POWER, 2 CPU 槽A38HB QnA BASE UNIT, 8 I/O, HIGH SPEED ACCESS TIMEA1S38HB QnAS BASE UNIT, 8 I/O, HIGH SPEED ACCESS TIMEA61RP AC100-120/200-240V INPUT, DC 5V 8A OUTPUTAJ71QE71N-B2 以太网接口, 10BASE2AJ71QE71N-B5T 以太网接口, 10BASE-T/10BASE5AJ71QC24 RS232C &RS422 I/FAJ71QC24-R2 RS232 I/F, 2 通道AJ71QC24-R4 RS422 & RS422/485 I/FAJ71QC24N RS232C &RS422 I/F(新型)AJ71QC24N-R2 RS232 I/F, 2 通道(新型)AJ71QC24N-R4 RS422 & RS422/485 I/F(新型)AJ71QLP21 MELSECNET/10 , SI-200/250 光纤AJ71QLP21S MELSECNET/10 , SI-200/250 光纤, EXT POWER AJ71QLP21G MELSECNET/10 , GI-50/125 TYPE 光纤AJ71QBR11 MELSECNET/10 , 同轴电缆AJ72QLP25 MELSECNET/10 远程I/O 控制器, SI 光纤AJ72QLP25G MELSECNET/10 远程I/O 控制器, GI 光纤AJ72QBR15 MELSECNET/10 远程I/O 控制器, 同轴电缆AJ61QBT11 CC-LINK 主站A1SJ71QE71N-B2 以太网接口, 10BASE2A1SJ71QE71N-B5T 以太网接口, 10BASE-T/10BASE5A1SJ71QLP21 MELSECNET/10 , SI-200/250 光纤, 紧凑型A1SJ71QBR11 MELSECNET/10 , 同轴电缆, 紧凑型A1SJ72QLP25 MELSECNET/10 远程I/O 模块, 光缆A1SJ72QBR15 MELSECNET/10 远程I/O 模块, 同轴电缆A1SJ71QC24 RS232C &RS422 I/F, 紧凑型A1SJ71QC24-R2 RS232 I/F, 2 通道, 紧凑型A1SJ71QC24N RS232C &RS422 I/F, 紧凑型(新型)A1SJ61QBT11 CC-LINK 主站[内存]Q1MEM-64S SRAM IC卡64KB(PCMCIA 2.0)Q1MEM-128S SRAM IC卡128KB(PCMCIA 2.0)Q1MEM-256S SRAM IC卡256KB(PCMCIA 2.0)Q1MEM-512S SRAM IC卡512KB(PCMCIA 2.0)Q1MEM-1MS SRAM IC卡1MB(PCMCIA 2.0)Q1MEM-2MS SRAM IC卡2MB(PCMCIA 2.0)Q1MEM-64SE SRAM 32KB+EEPROM 32KB(PCMCIA 2.0)Q1MEM-128SE SRAM 64KB+EEPROM 64KB(PCMCIA 2.0)Q1MEM-256SE SRAM 128KB+EEPROM 128KB(PCMCIA 2.0)Q1MEM-512SE SRAM 256KB+EEPROM 256KB(PCMCIA 2.0)Q1MEM-1MSE SRAM 512KB+EEPROM 512KB(PCMCIA 2.0)Q1MEM-256SF SRAM 128KB+FLASH ROM 128KB(PCMCIA 2.0)Q1MEM-512SF SRAM 256KB+FLASH ROM 256KB(PCMCIA 2.0)Q1MEM-1MSF SRAM 512KB+FLASH ROM 512KB(PCMCIA 2.0)Q1MEM-2MSF SRAM 1MB+FLASH ROM 1MB(PCMCIA 2.0)[其它特殊模块]A6RAF 总线开关模块AS92R 系统故障检测模块AS91 系统故障检测模块Q6PU 编程器。
e和q系列cpu哪个好
e和q系列cpu哪个好买电脑intel的cpu时有些人就会烦恼,到底是买e系列的cpu的好,还是q系列的好。
为此店铺为大家整理推荐了相关的知识,希望大家喜欢。
e和q系列cpu哪个好的问题解答专业解答:1:奔腾酷睿E是指双核,Q是四核。
2:无论是E还是Q,一般后面有4位数,比如E7500或者Q8400,那么字母后面第一位越高代表构架和缓存等方面越完整,其价格也越高,字母后面第二位是该系列的等级,比如E7500就比E7400要强。
3:比较弱的是E2160和E2180,性能低下,高点的有E3300和E5400之类,再高级点常见联想电脑用的E6600,和E7300等,再往上就是双核顶级E8系列,比如E8600属于酷睿双核顶级型号4:奔腾酷睿的分极线是E7500,低于E7500的CPU都叫奔腾,例如常见的E5700,E6600等都是奔腾,也就是缩水的酷睿。
5:E系列最高级是E8600,这货性能接近老的i3处理器。
Q系列有Q6xxx,Q8XXX和Q9XXX,其中Q9xxx为以前的顶级系列,等同现在的i7定位,比如Q9550,其2级缓存比较强悍。
总结:E系列的早。
两种CPU的核心数量不同,E系列是双核的,而Q系列是4核的。
Q系列CPU的二级缓存是8MB,而E系列只有2MB或4MB。
二级缓存的容量是影响CPU处理速度的一个重要指标。
E系列分为6xxx和4xxx两种,前者的HT总线是1066MHz,后者的HT总线则是800MHz,E系列是Q系列的低端版本,对于酷睿Q系列来说,HT总线则提高到了1333MHz,是一个划时代的突破,使CPU的性能更好的发挥。
当然,现在英特尔酷睿Q和相关配件的价格还比较高,但是,他继承了酷睿2高效低能的优点,所以它性能的强悍是不争的事实,所以说,2008年电脑的发展趋势将是双核和多核的天下。
三菱Q系列PLC网络全参数设置方法及注意事项

PLC网络参数设置打开GX Works2,在菜单栏依次选择工程—新建,在弹出窗口界面选择CPU系列、机型、(本文件以Q03UDE为例进行说明)、工程类型、程序语言。
在进行参数设置之前,先简单介绍一下GX Works2中对参数修改及对应参数窗口标签颜色的定义。
设置项目是按目的对标签进行了分类,参数设置状态以标签的字符颜色表示如下表所示(此规则适用于GX Works2中所有的参数设置界面):字符颜色内容数据处于未设置状态,如下图中必须设置中的未设置红( 如果未进行数据设置将无法执行动作)数据处于已设置状态,如下图中必须设置中的已设置蓝( 如果对红色的标签进行数据设置,标签的字符颜色将变为蓝色。
)默认值,如下图中必要时设置中的未设置红紫( 未进行用户设置)除默认值以外的值,如下图中必要时设置中的已设置深蓝( 如果对红紫色的标签进行了数据设置,标签的字符颜色将变为深蓝色。
)2.1PLC参数设置项目新建完成后在左侧工程菜单栏选择PLC参数设置。
5.1.1软元件设置在PLC参数设置界面首先选择软元件设置,软元件的默认参数如下图所示。
其中软元件点数的白色部分可手动修改,灰色部分不可修改。
可根据项目需求进行软元件点数的修改,但需注意软元件合计字节不可超过CPU的上限。
5.1.2PLC系统设置PLC的系统设置常用的包括通用指针号、空插槽点数、远程复位。
a)通用指针号:对程序中使用的通用指针的起始No. 进行设置(仅基本型QCPU不能设置)。
设置范围0~4095;指针(P)应用于主程序中的子程序,子程序是从指针(P )开始至RET 指令为止的程序,创建于FEND指令~END 指令,仅在从主程序内通过CALL(P)、FCALL(P)指令等调用的情况下才被执行。
子程序应在下述用途中使用:将1个扫描中多次执行的程序汇集为子程序,减少整体步数的情况下;将仅在某个条件下才执行的程序设置为子程序,以缩短相应扫描时间的情况下之间。
Q170MCPU+100524
丰富的MELSEC-Q系列模块可供连接
案例分析 当需要增加或改变系统功能时,无需对系统进行重新设计
可选择超过100个不同类型 的模块进行系统功能扩展
无限制的Q170MCPU!
当需要增加或改变系统功能时 , 无 论是 I/O 模块、A/D 转换模块、温 度控制模块还是其他的如网络通讯 模块等 , 都可方便快捷地添加到系 统中 , 无需重新设计系统
二合一 MR-J3W 伺服放大器
案例分析 即使在结构紧凑的控制柜里安装,也可有效节省空间
如右图所示,可将 所有元器件放入结 构紧凑的控制柜中!
至少需要8槽基板...
24 VDC 电源
Q170MCPU! 独立的模块, 可简化设计
配合使用二合一伺服放 大器可进一步节省空间!
二 合 一 伺 服 放 大 器 MR-J3W 与 Q170MCPU 安装面积相当 , 与两 个 MR-J3 伺服放大器的安装面积 想比 , 可节省至少 25% 的空间。 MR-J3W 和 Q170MCPU 配合使 用 , 可实现最大安装空间的节省。 此外 , 两槽扩展基板的尺寸仅为 106 mm × 98 mm, 可有效利用结 构紧凑的控制柜里的安装空间
· 芯片安装 · 晶圆片切割机 · 装料/卸料机 · 贴片机 · X-Y工作台
圆弧插补, 等速度控制, 带定位停止的速度控制, 定长进给,速度切换控制, 速度控制,速度-位置切换, 直线插补(1到4轴)
自动机器用 SV22对应运动SFC
支支持持机机械械的的语言言 SW8DNC-SV22QF suppor t language
高集成运动控制器
有效使用程序资源
性能增强!
最大限度地减少系统 扩展所带来的设计成本!
能满足将来系统扩展的需求吗? Q170MCPU将彻底消除您的疑虑。 将运动控制器Q170MCPU升级到高端 的iQ平台, 只需花费极少的时间和成本
Q系列PLC连接工控机群控系统设置
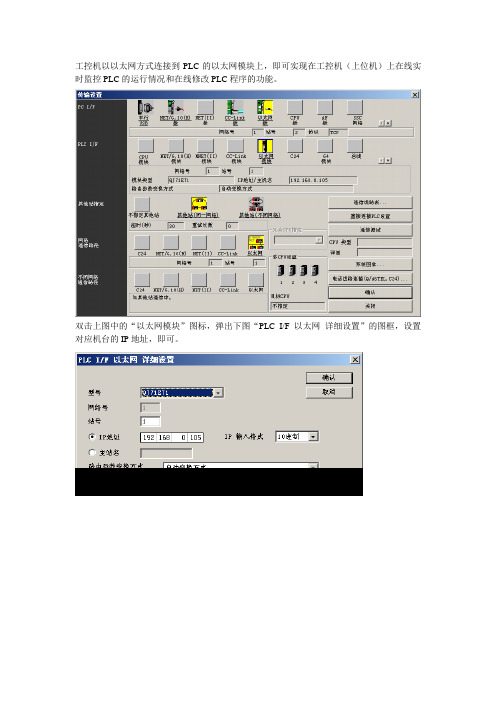
工控机以以太网方式连接到PLC的以太网模块上,即可实现在工控机(上位机)上在线实时监控PLC的运行情况和在线修改PLC程序的功能。
双击上图中的“以太网模块”图标,弹出下图“PLC I/F 以太网详细设置”的图框,设置对应机台的IP地址,即可。
上位机发送数据给PLC的方法:1.采用EASYIF控件:首先在电脑上安装PLC MONITOR UTILITY在这里可以设置机台和上位机的通讯参数,点击Wizard…按钮,进入参数设置向导界面:注意:Logical station number参数是唯一对应一个IP地址的,Easyif控件就是以此来连接对应的PLC的,输入1,然后Next>会鲜亮,点击它进入下一画面在此画面中选择PC端的连接方式:在这里我们选择连接的是PLC的以太网模块,所以选择Ethernet board,此时画面会显示对应的参数设置:然后选择好连接的以太网模块型号,在这里我们采用的是QJ71E71的以太网模块,协议采用TCP,Station No(站名)和Network No(网络号)要和PLC以太网的设置一样,点击Next>进入设置IP地址界面设置好IP地址后,按Next>进入下一步选择好CPU型号:我们选Q01按Next>进入下一步给你的设置起个名字我们输入MC100然后按Finish然后在列表中就会添加一个新的记录双击它可以重复之前的设置最后对你的设置进行测试,看看连上没有在此界面中选中你要测试的机台,按Text按钮,如果测试成功会弹出一个成功对话框然后你就可以用Easyif控件在VB中编程传递你要的数据了。
Dim szDeviceList As String 'DeviceList你要传输到的存储区列表Dim lData() As Long 'DeviceData你要传输的数据Dim lSize As Long 'WriteSize 你要传输的数据的长度Dim lRet As Long 'Return value.返回值0表示正确,其他数表示错误ActEasyIF1.ActLogicalStationNumber =10'The value of a LogicalStationNumber is set in the property. lRet = ActEasyIF1.Open ‘The Open method is executed.lRet = ActEasyIF1.WriteDeviceRandom(szDeviceList, lSize, lData(0))'The WriteDeviceRandom method is executed.lRet = ActEasyIF1.Close 'The Close method is executed.方法总结:把你要传输的数据一个一个地放到LONG型数组中,然后将LONG型数组一个一个地发送到指定的存储区中,(可以是DM区或R区)。
三菱PLC Q 基础介绍 PLC参数设置

Qn安装面积比■体积比
( 对 AnS : 8槽基板比较)
安装面积比
体积比
约 60 %
约 50 %
4. 省空间化(2)
★ 多槽位基板省空间
备有多槽位基板(12槽位用) 增加槽位,不需追加增设电缆/基座/电源,实现了省空间
控制处理器和资料处理 器并列处理
资料处理 机械控制 (低速) (高速)
(1ms 以下超高速控制)(数十毫秒的控制)
机械控制
资料处理
由一个处理器全部控制
由双处理器控制,分散负载
6. 控制系统高性能化(2)
★ 调整DC输入模块的频率,架构最适当系统
可选择符合系统的最适当动作,而简单实现系统的高速化
◆ 参数设置画面(可变更反应时间)
第二章:基板单元和扩展电缆(2-1)
★ 安装面积
◆ Q系列具备了对应2/3/5/8/12槽的主基板模块 ◆ 用超薄型基板更能节省安装的面积
◆ 超薄型主基板
◆ 主基板
98 mm
2槽114mm 3槽142mm 5槽197.5mm
98 (深:98mm)mm
注:过程CPU不能使用超薄型基板
3槽189mm 5槽245mm 8槽328mm 12槽439mm
MAX 252K (28K,60K,128K,252K) 4096 点 16384点
8192 点 2048 点 1024 点 12288 点 32768 点 8192 点
A2USHCPU-S1
30K(只有主程序) 1024点 8192点
8192点 2048点 1024点 8192点 8192点 8192点
2.三菱Q系列PLC硬件与性能

Q系列PLC系统构成
常用混合输入输出模块QH42P 输入32点 DC24V 输出32点 DC12-24V 0.1A每点2A公共端
41
Q系列PLC系统构成
输出输出模块,16点一下(含16点的)接线用端子接 线,螺丝拧紧。32点的和64点用插针式连接器连接。
42
Q系列PLC系统构成
插针式连接器可以用焊线或是压线的连接器接 线,也可以通过三菱提供的专用连接电缆和端 子台,将接线信号接到端子台上,然后在端子 台上涌螺丝接线。
Q系列PLC的基本构成包括电源模块、CPU模块、基板、I/O 模块,根据实际控制要求还可以放置通讯、定位、温度、 模拟量等各种模块,并且每种类型的模块中有多个型号、 规格供选装。
3
Q系列PLC简介
Q系列PLC可以实现多CPU模块安装在同一个基板上, 一个系统最多可以安装4个CPU,CPU中可以是顺控 CPU、运动CPU等组合。每个CPU之间可以通过参数 设置实现数据刷新进行定期的通讯或通过特殊指令 进行瞬时的通讯。
19
Q系列PLC系统构成
可以安装电源模块的扩展基板有3、5、8、12槽,型号分别 为Q63B、Q65B、Q68B、Q612B。
扩展基板中放置电源模块的位置不占用以上的插槽数,此处 的插槽数指的是放置I/O模块或是其它特殊功能模块的数量
扩展基板最左侧有两个 接口,一个接口用于连 接上一级的基板,一个 接口用于连接下一级的 基板
17
Q系列PLC系统构成
基板分为主基板和扩展基板,一个PLC中至少要有一个主基 板,用来防止各种模块,主机板最左边按顺序防止电源模 块、CPU,然后防止输入输出及其它特殊模块。主机板按照 插槽分为3、5、8、12槽,对应的型号是:Q33B、Q35B、 Q38B、Q312B。插槽数是指出了电源和一个CPU之外后的插 槽数。
三菱PLC Q 基础介绍 PLC参数设置
GX Developer
QnHCPU
◆ 可多人利用GX Developer来除错,提高试车效率
9. 易维护性(2)
★ 可以简单地对系统进行监视及找出故障发生原因
在GX Developer中选择: [Diagnostics] ⇒[PLC diagnostics] 显示以下画面, 查看发生的错误
点击 Help 打开上面画面查看错误定义
6. 控制系统高性能化(1)
★ 双处理器控制
A系列
PLC CPU的处理内容
Q系列Qn(H)CPU
PLC
控制
资料 处理
PLC控制 X10
I/O更新
Y20 <> [MOV DO D2 ]
资料处理
・和编程软件GX Developer通信
・和计算机、网络模块通信等
PLC
资料
控制
处理
在控制处理器 上处理
在资料处理器 上处理
第二章:基板单元和扩展电缆(2-1)
★ 安装面积
◆ Q系列具备了对应2/3/5/8/12槽的主基板模块 ◆ 用超薄型基板更能节省安装的面积
◆ 超薄型主基板
◆ 主基板
98 mm
2槽114mm 3槽142mm 5槽197.5mm
98 (深:98mm)mm
注:过程CPU不能使用超薄型基板
3槽189mm 5槽245mm 8槽328mm 12槽439mm
网络型分散系统
BUS型分散系统
MELSECNET/10
不需要使用网络模块和网络用电缆 将共用电源模块和基板 每一组CPU都将可获取同一个模块的输入信号 CC-Link的输入信号也可以共同使用
特长! 由于系统省空间,电源和基板可以共同使用,因此可节省成本
三菱QCPU(Q系列) QnACPU编程手册(PID控制指令篇)

© 1999 三菱电机
A-3
前言
非常感谢您选购了三菱通用可编程控制器的 MELSEC-Q/QnA 系列。 请在使用之前熟读本书,在充分理解-Q 系列可编程控制器的功能、性能的基础上正确地加以使用。 应确保将本手册交给最终用户。
安全注意事项 ...........................................................................A - 1 修订记录 ...............................................................................A - 3 目录 ...................................................................................A - 4 关于本手册 .............................................................................A - 6
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
通过使用标准ROM或存储卡高性能型号可以增加适用的
存储容量而基本型号即使有标准ROM也不能增加存储容
量注2.3
当选择CPU和存储卡注2.1时我们建议你计算与存
储目标一起使用的存储器的容量选择容量稍大一点的型
号
关于计算使用的存储容量的方法参考第2章第2.2.4
节第2.3.4节内置存储器/存储卡
接软元件
要点1 -1 I/O点
表示安装在主基板/扩展基板上的I/O和智能功能模块使用
的I/O X/Y软元件点数各个模块的I/O点数由模块本
身预先决定并在模块安装时自动占用
作为在CPU模块中ON/OFF操作的结果I/OX/Y软元
件用作来自传感器开关和其它外部设备的ON/OFF信号
或来自执行机构接触器和其它外部设备的输出
基本型号中最多2048点
注1.2 MELSECNET/H远程I/O网络可用于高性能型号
X/Y000
0FF
7FF
07F
I/O软元件点数2048点
<用于Q00JCPU的程序>
I/O为128点
用于远程I/O 1920点
2048-128=1920点
I/O点数
最高
256点
要点1 -3链接软元件点
表示MELSECNET/H中的链接继电器B和链接软元件
由于指定的软元件可以用实际软元件描述而其它的则自动
分配因此你可以把预先创建的标准程序转用于类似的设
备
具体解释第2章第3.1.2节
目标CPU高性能型号
1-6
CPU选择要点
宏指令用户定义的指令
把经常使用的程序块转换为单个指令并注册能够进行高效
编程
M.MAC1 R0 R1 R2
> R0 R1 MOV R0 R2
相关情况的限制
数据处理低速
机器控制高速
由一个CPU执行的所有控制
机器控制CPU数据处理CPU
按照控制节拍的负载分布能够实现稳定快速的机械控制
具体解释第2章第2.4节
目标CPU高性能型号
1-5
CPU选择要点
CPU选择
要点
CPU选择要点4扫描时间减少/响应等级
改进
要点4 -1指令处理速度
CPU的指令处理速度直接影响CPU的扫描时间下表表
束
创建主程序FEND指令后后的中断程序并用其它程序
将它插入待机程序
1中断条件
a中断模块QI60
b内部定时器
c出错注4.1
d智能功能模块注4.1
2效果
a由于只要中断条件正确就执行中断程序所以可
以实现快速响应而不影响扫描时间
b把只在发生中断因素时执行的程序放在主程序之
外可以减少扫描时间
具体解释第2章第3.1.1节/第3.1.2节
链接继
电器
链接软元2048 8192
件点
1 -3
注
1.3
链接寄
存器
2048 8192
注1.3按照默认
CPU选择要点2存储容量
要点2 -1程序/注释容量
程序/注释存储在任何程序存储器标准ROM和存储卡中
注2.1各种CPU各有不同的存储容量
下表表示程序存储器或标准ROM用作存储目标时的存储容
量
给出的存储容量是参数程序注释智能功能模块参数
示基本指令的处理时间作为表示各个CPU的处理速度的
指南
注意软元件的变址修饰不会导致处理延迟指令处理时间
随着要执行的指令而变化详情参考编程手册公用指令
篇
基本型号高性能型号
项目
Q00J Q00 Q01 Q02 Q02H Q06H Q12H Q25H
LD指令200ns 160ns 100ns 79ns 34ns
内置存储器/存储卡
注2.4存储卡适用于高性能型号
由于Q00和Q01CPU不能使用存储卡所以要使用标准
RAM
Q00JCPU不能使用文件寄存器
基本型号高性能型号
项目
Q00J Q00 Q01 Q02 Q02H Q06H Q12H Q25H
程序容量步2 -1 8k 14k 28k 60k 124k 252k
W
下表表示最高链接软元件点
注意根据网络配置和相关情况对最高链接软元件点有限
制
关于MELSECNET/H的详情参考第2章第2.7节第
2.8节
基本型号高性能型号
项目
Q00J Q00 Q01 Q02 Q02
H
Q06
H
Q12
H
Q25
H
I/O软元件点2048 8192
6
< R0 R1 MOV R1 R2
宏指令
显示宏指令的确切表达
具体解释第2章第3.1.1节第3.1.2节
目标CPU基本型号/高性能型号
功能块FB
把指定的程序块注册为功能块FB使顺控程序更易于作
为一个构件转换
具体解释第2章第3.1.2节
目标CPU高性能型号
SFC语言
代表制造设备的程序它能够对自身进行处理它是构建
CPU选择
要点
1-3
CPU选择要点
注2.1提供可用于高性能型号的存储卡
注2.2软元件初始化值可用于高性能型号
注2.3基本型号的ROM功能是程序存储器中存储的数据可以传
送到标准ROM的功能那种情况下由于数据不能分
开存储在标准ROM和程序存储器中所以不能增加存
储容量
除了把数据从程序存储器传送到标准ROM/存储卡的方
RAM时
文件寄存器点无32k 32k 128k
2 -3
当使用SRAM卡时无不能使用存储卡505k
注2.5关于基本型号............................................表示参数程序注释和智能功能模块参数容量之和
关于高性能型号........................................表示参数程序注释智能功能模块参数和软元件初始化值容量之和
式之外如果你使用的是高性能型号你还可以通过GX
Developer直接把数据写入标准ROM/存储卡
要点2 -2软元件点
下表表示最高的软元件点
要点2 -3文件寄存器点
可以处理大容量数据的文件寄存器可用于存储控制数据
例子可用于记录监视数据时
文件寄存器存储在内置标准RAM或存储卡注2.4中
关于可以存储文件寄存器的存储卡的详情参考第2.3.4节
改变机械控制而后者的CPU改变数据通讯和大容量处
理所以顺序控制可以与PC应用程序集成在一起
上位站计算机
数据通讯
数据管理
数据库
触点Contec
PC
CPU
具体解释第2章第2.4节
目标CPU高性能型号
要点3 -3多PLC CPU的组合使用装载
分布
根据控制原理分隔/划分CPU模块例如用于机械控制
和数据处理可以实现快速机械控制而不受数据处理和
注2.6使用参数可以在下列范围内更改软元件点X Y S SB和SW是固定的
基本型号...................................................总的软元件容量可以在16.4k字的范围内设置
详情参考第2章第3.1.1节
高性能型号................................................总的软元件容量可以在28.8k字的范围内设置
高性能型号QCPU Q02 H Q06H Q12H和Q25HCPU的通用术语
1-2
CPU选择要点1用于控制/监视的I/O点
PLC系统的规模由实际受控制/监视的I/O点数和用于数据
处理的内部软元件点数确定
控制的和监视的I/O包括主基板/扩展基板上的I/O和通过
网络和智能功能模块例如模拟模块传送的远程I/O和链
使用的I/O点之和
32+32+16+16+32=
128点
注1.1各个插槽的I/O地址可以在参数配置中更改
要点1 -2用于远程I/O的I/O点
使用CC-Link或MELSECNET/H远程I/O网络注1.2
能够控制离CPU模块很远的I/O
高性能型号最高可以使用8192个I/O软元件X/Y点
包括直接I/O和远程I/O
参数/程序/注释容量字节
2 -1注2.5
58k 94k 112k 240k 496k 1008k
输入X 2048 8192
输出Y 2048 8192
内部继电器M 8192 8192
锁存继电器L 2048 8192
报警器F 1024 2048
边沿继电器V 1024 2048
步进继电器S 2048注2.7 8192
目标CPU基本型号/高性能型号
注4.1可用于高性能型号
CPU选择要点5程序生产力改进
要点5 -1程序构建/标准化
程序划分
你可以按照目的和功能创建程序并把它们作为多个程序写
入CPU
因而几个开发设计者可以同时创建不同的程序大大提高
程序的生产性
具体解释第2章第3.1.2节
目标CPU高性能型号
标贴编程
可以用标贴更换软元件来叙述程序
同时也用作CPU和智能功能模块之间的接口信号
最高I/O容量在要点1 -3中的表中表示
Q00JCPU QX41 QX41 Q62DA Q64AD QJ61
BT11
X000
至
01F
X020
至
03F
X/Y040
至
04F
X/Y050
至
05F
X/Y060
至
07F