S120的基本定位功能
S120设置

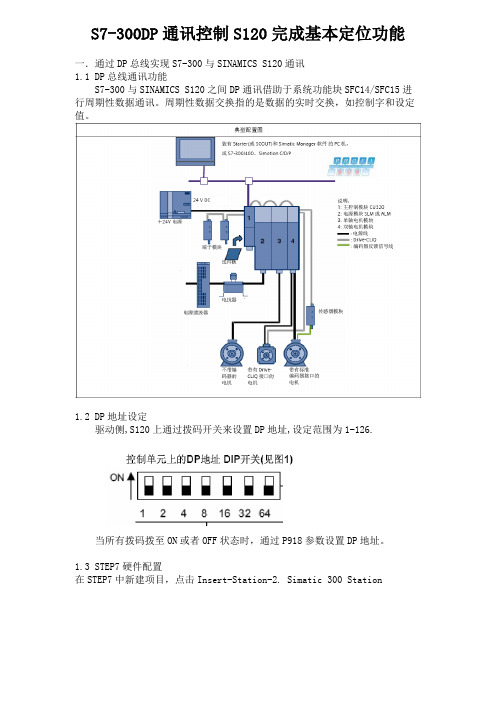
S7-300DP通讯控制S120完成基本定位功能一.通过DP总线实现S7-300与SINAMICS S120通讯1.1 DP总线通讯功能S7-300与SINAMICS S120之间DP通讯借助于系统功能块SFC14/SFC15进行周期性数据通讯。
周期性数据交换指的是数据的实时交换,如控制字和设定值。
1.2 DP地址设定驱动侧,S120上通过拨码开关来设置DP地址,设定范围为1-126.当所有拨码拨至ON或者OFF状态时,通过P918参数设置DP地址。
1.3 STEP7硬件配置在STEP7中新建项目,点击Insert-Station-2. Simatic 300 Station打开硬件组态,新建DP NETWORK,在CATALOG中选择相应S120产品,如SINAMICS S120 CU310,将其加入DP总线,DP地址设置应与驱动侧设置地址一致。
选择相应的S120Firmware版本,如V2.5此时会要求选择Message frame,点击选中Object1,然后点击Delete slot, 这时Message frame selection为None。
点击OK。
保存编译硬件组态,将其下载至PLC中。
注:此时仅将PLC硬件配置完成,S7-300与S120之间通讯尚未建立,CPU会BF灯亮,SF等闪烁,S120侧LED DP灯不亮。
1.4 S120配置打开STEP7,此时会出现SINAMICS S120 CU310,点击Open Object打开S120项目。
打开S120项目后,选择在线Connect to target system若是新的CF卡可选择自动配置Automatic Configuration,通过DRIVE-CLIQ 口将S120硬件配置装载至PG电脑。
若是旧CF已有配置,可选择工厂复位,将参数复位到出厂状态。
点击Start automatic configuration按钮,开始自动配置提示选择S120驱动类型,选择SERVO伺服方式。
西门子变频器S120调试指南

目录第一章电机优化 (3)1.S120驱动感应电机的优化 (3)1.1 正确配置电机 (3)1.2 优化过程: (3)2.S120 驱动第三方伺服电机时的优化 (4)a.电机数据计算P340 (5)b.电机数据静态辨识P1910 (5)c.速度环动态特性的优化 (5)d.电机数据动态辨识P1959 + P1960 (5)第二章 S120的基本定位 (6)前言 (6)一、激活基本定位功能 (6)二、基本定位_点动(JOG): (8)三、基本定位_回零(Homing / Reference): (9)四、基本定位_限位(Limit): (12)五、基本定位_程序步(Traversing Blocks) (13)六、手动数据输入(MDI) (14)第三章通讯 (17)一、使用PG/PC 的串口与S120通讯 (17)1.1 设置步骤: (17)1.2 S120地址的设定: (18)二、S120与TP170直接通讯 (18)2.1硬件准备与网络连接 (18)2.2 网络地址的设定: (19)2.3 ProTool 项目配置 (19)2.4 建立标签 (20)三、S120、TP170B与S7 200 (22)3.1 硬件准备及网络连接: (22)3.2 网络地址的设定 (22)3.3 建立变量 (24)四、通过DP总线实现S7-300与SINAMICS S120 通讯 (26)4.1 DP总线通讯功能简述 (26)4.2 DP通讯步骤 (26)4.2.1 DP 地址设定 (26)4.2.2 DP 报文设置 (27)五、通过Slave to Slave 方式实现各从站之间通讯 (38)5.1在 Step 7中项目组态 (39)5.2 从站参数配置 (39)5.3 激活Slave to Slave 功能 (41)5.4 在Step 7中使用SFC14,15读写7# 站数据 (41)第一章电机优化从V2.4版本起,Sinamics S120开放了对电机的优化功能,可优化的电机包括普通感应电机和同步伺服电机,无论是对Siemens 电机还是对第三方电机都可达到最优的控制特性。
S120的基本定位功能

S120得基本定位功能一、概述S120 有两种形式:用于多轴系统得DC/AC装置ﻫ用于单轴系统得AC/AC装置这两种形式得Firmware V2.4及以上版本都已具备基本定位功能。
当前V2。
4版本得S120具有如下定位功能:ﻫ•点动(Jog): 用于手动方式移动轴,通过按钮使轴运行至目标点•回零(Homing/Reference):用于定义轴得参考点或运行中回零ﻫ•限位(Limits):用于限制轴得速度、位置、包括软限位、硬限位ﻫ•程序步(Traversing Blocks): 共64个程序步,可自动连续执行一个完整得程序也可单步执行•直接设定值输入/手动设定值输入(DirectSetpointInput /MDI):目标位置及运行速度可由上位机实时控制。
使用S120 基本定位功能得前提条件:调试软件:StarterV4、0 或更高版本/ SCOUTV4。
0 或更高版本ﻫ硬件版本:SINAMICS FW: V2。
4 HF2或更高版本注:安装SCOUT V4。
0 需要STEP 7 版本至少为V5、3。
3.1 以上二、激活基本定位功能ﻫS120得定位功能必须在变频器离线配置中激活,步骤如下:定位功能激活后可使用STARTER中得控制面板或专家参数表进行设置定位功能激活后可使用STARTER中得控制面板或专家参数表进行设置使用控制面板使用专家参数表使用控制面板得操作步骤:三、基本定位_点动(JOG)S120 中基本定位功能得点动有两种方式:ﻫ•速度方式( travelendless):点动按钮按下,轴以设定得速度运行直至按钮释放、•位置方式( travelincremental):点动按钮按下并保持,轴以设定得速度运行至目标位置后自动停止。
•使用控制面板得点动功能仅限于速度方式,位置方式需使用专家参数表设定。
•执行点动功能,应先使能变频器ON/OFF1(P0840)四、基本定位_回零(Homing /Reference)回零/寻参(Homing /Reference)ﻫ回参考点模式(回零模式)只有使用增量编码器(旋转编码器Reserver、正/余弦编码器Sin/Cos 或脉冲编码器)时需要,因每次上电时增量编码器与轴得机械位置之间没有任何确定得关系。
SinamicsS120基本定位功能在钢带纵横剪切线中的应用

ma i n l y f o r b a s i c p o s i t i o n e r f u n c t i o n o f d iv r e . T h e b a s i c h a r d wa r e s t r u c t u r e o f e l e c t ic r c o n t r o l s y s t e m o f he t s l i t t i n g a n d c u t - t o - l e n g t h l i n e wa s b i r e l f y i l l u s t r a t e d ,t h e s o f t wa r e d e s i g n o f t h e b a s i c p o s i t i o n e r f u n c t i o n o f t h e S i n a mi c s
U Xi - n i n g
( Xi ’ a n Q 啪 Me c h a n i c a l a n d E l e c t r i c l a E q “ i p 胱 C o . , L t d . , Xi ’ n a 7 1 0 0 1 8 , S h a a n x i , C h i n a )
t h e p r o d u c t i o n e f i c i e n c y o f t h e s t e e l s h e e t .
S120设置

S7-300DP通讯控制S120完成基本定位功能一.通过DP总线实现S7-300与SINAMICS S120通讯1.1 DP总线通讯功能S7-300与SINAMICS S120之间DP通讯借助于系统功能块SFC14/SFC15进行周期性数据通讯。
周期性数据交换指的是数据的实时交换,如控制字和设定值。
1.2 DP地址设定驱动侧,S120上通过拨码开关来设置DP地址,设定范围为1-126.当所有拨码拨至ON或者OFF状态时,通过P918参数设置DP地址。
1.3 STEP7硬件配置在STEP7中新建项目,点击Insert-Station-2. Simatic 300 Station打开硬件组态,新建DP NETWORK,在CATALOG中选择相应S120产品,如SINAMICS S120 CU310,将其加入DP总线,DP地址设置应与驱动侧设置地址一致。
选择相应的S120Firmware版本,如V2.5此时会要求选择Message frame,点击选中Object1,然后点击Delete slot, 这时Message frame selection为None。
点击OK。
保存编译硬件组态,将其下载至PLC中。
注:此时仅将PLC硬件配置完成,S7-300与S120之间通讯尚未建立,CPU会BF灯亮,SF等闪烁,S120侧LED DP灯不亮。
1.4 S120配置打开STEP7,此时会出现SINAMICS S120 CU310,点击Open Object打开S120项目。
打开S120项目后,选择在线Connect to target system若是新的CF卡可选择自动配置Automatic Configuration,通过DRIVE-CLIQ 口将S120硬件配置装载至PG电脑。
若是旧CF已有配置,可选择工厂复位,将参数复位到出厂状态。
点击Start automatic configuration按钮,开始自动配置提示选择S120驱动类型,选择SERVO伺服方式。
西门子S7-1200 1500 FB284控制S120实现基本定位功能说明书
/CN/view/zh/109765580C o p y r i g h t ãS i e m e n s A G C o p y r i g h t y e a r A l l r i g h t s r e s e r v e d目录1概述 ............................................................. 32SINA_POS(FB284)介绍 .. (33)SINA_POS 功能说明 ................................................. 63.1概述 ........................................................ 63.2功能块的运行模式介绍 ........................................ 63.2.1运行条件 .................................................... 63.2.2相对定位运行模式 ............................................ 63.2.3绝对定位运行模式 ............................................ 73.2.4连续运行模式(按指定速度运行) ................................ 83.2.5主动回零 .................................................... 93.2.6直接设置回零位置 ........................................... 103.2.7运行程序段 ................................................. 103.2.8按指定速度点动 ............................................. 113.2.9按指定距离点动 ............................................. 123.2.10运行中回零(被动回零) ....................................... 123.3基于ModePos 值的运行模式切换说明 (12)4项目配置 ........................................................ 134.1S120项目配置要点 ........................................... 134.2S7-1500项目配置步骤 (17)C o p y r i g h t ãS i e m e n s A G C o p y r i g h t y e a r A l l r i g h t s r e s e r v e d1概述S7-1200/1500可以通过PROFINET 通信连接SINAMICS S120伺服驱动器,PLC 通过西门子提供的驱动库中的功能块FB284可实现S120的基本定位(EPOS )控制。
SINAMICS S120基本定位的监视功能与应用
圈 P L C & I P C & E A S
S I NAMI C S¥1 2 0 基 本 定 位 的监视 功 能与应 用
SI NAM I CS Sl 2 0 Mo n i t o r i n g Fu n c t i on s a n d Ap p l i c a t i on s o f t h e Ba s i c Po s i t i on
动器 ,从功 能上 讲 ,已经超 越 了传统 变频器 的功 能范畴 。S 1 2 0  ̄ E 动不仅 仅
能 够 实 现 闭 环 矢 量 控 制 ,还 可 以 实 现
通过选件 ,应用于C A N总线等。
( 4 ) 与 上 位伺 服控 制 器 的 无 缝连 接 : 通 过 多 种 报 文 , 可 以 方 便 地 与
DCC 功 能 ,可 以 无 限 扩 展 变 频 器 的 逻
特点,还在很多细节上有所创新 :
( 7 )  ̄ J l 新性的连接Dr i v e - C L i Q:使 用Dr i v e — C L i Q可 以自动识 别设 备并 完 成组态 ,节约调试时间。
( 1 ) 功率 范 围大 :几Kw 到上Mw
制 。通过 参数 配 置 ,可 以实现 S 1 2 0 1  ̄ 5 , 位 置监 控 功能 ,对 驱 动器 各伺 服 轴的 位置 状 态进 行检 测 ,
优 化驱 动 轴的状 态 。本 文主 要对监 视 功能 的工 作原理 和 可配 置的 参数进 行 介绍 。 关 键词 N A MI C S S 1 2 0 继承和
发 展 了西 门子 变频 器 一 贯 的 功能 强 大 的
S I MO T I ON、C P U3 1 5 T 等运 动控制器 进行连接 ,实现高精度定位 。 ( 5 ) 内部 资源丰富 :除了传统变频 器的J O G、F i x e d S e t p o i n t 、MO P 、 自由 功能块 等 ,还可 以扩展 出回零 、程序 步 、MDI 等 定位操 作 。同时 ,集成 的
S120的基本定位功能

S120的基本定位功能Basic Position Function of S120摘要:本文介绍了S120 Firmware V2.4 及以上版本的基本定位功能,包括: 点动、回零、限位、 程序步、直接设定值输入/手动设定值输入。
关键词:SINAMICS S120 、基本定位。
Key words:SINAMICS S120 、Basic Position.目录一、概述 (4)二、激活基本定位功能 (4)三、基本定位_点动(JOG) (6)四、基本定位_回零(Homing / Reference) (7)4.1设置参考点 (Set_Reference) (7)4.2主动回零(Active Homing) (8)4.3动态回零(Passive Homing) (10)五、基本定位_限位(Limit) (12)六、基本定位_程序步(Traversing Blocks) (13)七、手动数据输入(MDI) (16)7.1 MDI 模式配置如下图所示 (17)7.2 激活 MDI 方式及参数配置 (17)7.3 调试参数 (18)一、概述S120 有两种形式:用于多轴系统的 DC/AC 装置用于单轴系统的 AC/AC 装置这两种形式的 Firmware V2.4 及以上版本都已具备基本定位功能。
当前V2.4 版本的 S120具有如下定位功能:• 点动 (Jog): 用于手动方式移动轴,通过按钮使轴运行至目标点• 回零 (Homing/Reference):用于定义轴的参考点或运行中回零• 限位 (Limits):用于限制轴的速度、位置。
包括软限位、硬限位• 程序步 (Traversing Blocks): 共64个程序步,可自动连续执行一个完整的程序也可单步执行• 直接设定值输入/手动设定值输入 (Direct Setpoint Input / MDI):目标位置及运行速度可由上位机实时控制。
使用 S120 基本定位功能的前提条件:调试软件:Starter V4.0 或更高版本 / SCOUT V4.0 或更高版本硬件版本:SINAMICS FW: V2.4 HF2 或更高版本注:安装 SCOUT V4.0 需要STEP 7 版本至少为 V5.3.3.1 以上二、激活基本定位功能1. 离线3驱动配置2. 配置4.激活基本定位3定位功能激活后可使用STARTER中的控制面板或专家参数表进行设置定位功能激活后可使用STARTER中的控制面板或专家参数表进行设置使用控制面板 使用专家参数表113.打开参数表23.打开控制面板2使用控制面板的操作步骤:三、基本定位_点动(JOG)S120 中基本定位功能的点动有两种方式:• 速度方式( travel endless):点动按钮按下,轴以设定的速度运行直至按钮释放。
S120地基本定位功能
S120的基本定位功能一、概述S120 有两种形式:用于多轴系统的 DC/AC 装置用于单轴系统的 AC/AC 装置这两种形式的 Firmware V2.4 及以上版本都已具备基本定位功能。
当前V2.4 版本的 S120具有如下定位功能:•点动 (Jog):用于手动方式移动轴,通过按钮使轴运行至目标点•回零 (Homing/Reference):用于定义轴的参考点或运行中回零•限位 (Limits):用于限制轴的速度、位置。
包括软限位、硬限位•程序步 (Traversing Blocks):共64个程序步,可自动连续执行一个完整的程序也可单步执行•直接设定值输入/手动设定值输入 (Direct Setpoint Input / MDI):目标位置及运行速度可由上位机实时控制。
使用 S120 基本定位功能的前提条件:调试软件:Starter V4.0 或更高版本 / SCOUT V4.0 或更高版本硬件版本:SINAMICS FW: V2.4 HF2 或更高版本注:安装 SCOUT V4.0 需要STEP 7 版本至少为 V5.3.3.1 以上二、激活基本定位功能S120的定位功能必须在变频器离线配置中激活,步骤如下:定位功能激活后可使用STARTER中的控制面板或专家参数表进行设置使用控制面板使用专家参数表使用控制面板的操作步骤:三、基本定位_点动(JOG)S120 中基本定位功能的点动有两种方式:•速度方式( travel endless):点动按钮按下,轴以设定的速度运行直至按钮释放。
•位置方式( travel incremental):点动按钮按下并保持,轴以设定的速度运行至目标位置后自动停止。
•使用控制面板的点动功能仅限于速度方式,位置方式需使用专家参数表设定。
•执行点动功能,应先使能变频器ON/OFF1(P0840)四、基本定位_回零(Homing / Reference)回零/寻参(Homing / Reference)回参考点模式(回零模式)只有使用增量编码器(旋转编码器 Reserver、正/余弦编码器Sin/Cos 或脉冲编码器)时需要,因每次上电时增量编码器与轴的机械位置之间没有任何确定的关系。
S120的基本定位功能
S120的基本定位功能一、概述S120 有两种形式:用于多轴系统的DC/AC 装置用于单轴系统的AC/AC 装置这两种形式的Firmware 及以上版本都已具备基本定位功能。
当前版本的S120具有如下定位功能:•点动(Jog):用于手动方式移动轴,通过按钮使轴运行至目标点•回零(Homing/Reference):用于定义轴的参考点或运行中回零•限位(Limits):用于限制轴的速度、位置。
包括软限位、硬限位•程序步(Traversing Blocks):共64个程序步,可自动连续执行一个完整的程序也可单步执行•直接设定值输入/手动设定值输入(Direct Setpoint Input / MDI):目标位置及运行速度可由上位机实时控制。
使用S120 基本定位功能的前提条件:调试软件:Starter 或更高版本/ SCOUT 或更高版本硬件版本:SINAMICS FW: HF2 或更高版本注:安装SCOUT 需要STEP 7 版本至少为以上二、激活基本定位功能S120的定位功能必须在变频器离线配置中激活,步骤如下:定位功能激活后可使用STARTER中的控制面板或专家参数表进行设置定位功能激活后可使用STARTER中的控制面板或专家参数表进行设置使用控制面板使用专家参数表使用控制面板的操作步骤:三、基本定位_点动(JOG)S120 中基本定位功能的点动有两种方式:•速度方式( travel endless):点动按钮按下,轴以设定的速度运行直至按钮释放。
•位置方式( travel incremental):点动按钮按下并保持,轴以设定的速度运行至目标位置后自动停止。
•使用控制面板的点动功能仅限于速度方式,位置方式需使用专家参数表设定。
•执行点动功能,应先使能变频器ON/OFF1(P0840)四、基本定位_回零(Homing / Reference)回零/寻参(Homing / Reference)回参考点模式(回零模式)只有使用增量编码器(旋转编码器Reserver、正/余弦编码器Sin/Cos 或脉冲编码器)时需要,因每次上电时增量编码器与轴的机械位置之间没有任何确定的关系。
2024版S120学习教程第一部分产品介绍

01S120是一款高性能变频器,主要用于控制和调节三相交流异步电机的速度和转矩。
02S120具有多种控制模式,包括速度控制、转矩控制、位置控制等,可满足不同应用场景的需求。
03S120还具备丰富的保护功能,如过流、过压、欠压、过热等,确保电机及变频器本身的安全运行。
S120定义及功能高性能S120采用先进的矢量控制技术,实现高精度、高动态响应的速度和转矩控制。
易用性S120提供简洁直观的操作界面和丰富的调试工具,方便用户进行参数设置和故障诊断。
可靠性S120采用高品质元器件和严格的生产工艺,确保产品的高可靠性和长寿命。
灵活性S120支持多种通讯协议和扩展模块,可与其他自动化设备实现无缝集成。
产品特点及优势01适用范围02应用场景S120适用于各种需要三相交流异步电机驱动的应用场合,如机床、风机、泵、压缩机、传送带等。
S120可广泛应用于工业自动化、能源、交通、建筑等领域,如自动化生产线、风力发电、电动汽车、电梯等。
适用范围和应用场景电机控制模块对电机进行精确控制,实现电机的启动、停止、调速等功能。
模块负责接收和发送数字量或模拟量信号,实现与外部设备的交互。
通信模块实现S120与其他设备或系统之间的数据传输和通信。
CPU 模块负责控制逻辑运算、数据处理等功能,是S120的核心部件。
电源模块为S120提供稳定可靠的电源,保证系统正常运行。
主要硬件部件介绍01连接方法通过电缆将各硬件部件连接起来,形成完整的S120系统。
02配置步骤首先进行系统初始化设置,然后根据实际需求配置各硬件部件的参数和功能。
03注意事项在连接和配置过程中,需确保电源稳定、接线正确、参数设置合理等,以避免出现故障或损坏设备。
硬件连接与配置方法03S120可能出现的故障包括电源故障、通信故障、I/O 故障等,其原因可能是硬件损坏、接线错误、参数设置不当等。
故障现象与原因针对不同类型的故障,可采用观察指示灯、检查接线、查看故障代码等方法进行排查。
S120的基本定位功能

S120的基本定位功能一、概述S120 有两种形式:用于多轴系统的DC/AC 装置用于单轴系统的AC/AC 装置这两种形式的Firmware V2.4 及以上版本都已具备基本定位功能.当前V2。
4 版本的S120具有如下定位功能:•点动(Jog):用于手动方式移动轴,通过按钮使轴运行至目标点•回零(Homing/Reference):用于定义轴的参考点或运行中回零•限位(Limits):用于限制轴的速度、位置。
包括软限位、硬限位•程序步(Traversing Blocks):共64个程序步,可自动连续执行一个完整的程序也可单步执行•直接设定值输入/手动设定值输入(Direct Setpoint Input / MDI):目标位置及运行速度可由上位机实时控制。
使用S120 基本定位功能的前提条件:调试软件:Starter V4.0 或更高版本/ SCOUT V4.0 或更高版本硬件版本:SINAMICS FW:V2。
4 HF2 或更高版本注:安装SCOUT V4.0 需要STEP 7 版本至少为V5.3.3。
1 以上二、激活基本定位功能S120的定位功能必须在变频器离线配置中激活,步骤如下:定位功能激活后可使用STARTER中的控制面板或专家参数表进行设置定位功能激活后可使用STARTER中的控制面板或专家参数表进行设置使用控制面板使用专家参数表使用控制面板的操作步骤:三、基本定位_点动(JOG)S120 中基本定位功能的点动有两种方式:•速度方式(travel endless):点动按钮按下,轴以设定的速度运行直至按钮释放.•位置方式( travel incremental):点动按钮按下并保持,轴以设定的速度运行至目标位置后自动停止。
•使用控制面板的点动功能仅限于速度方式,位置方式需使用专家参数表设定.•执行点动功能,应先使能变频器ON/OFF1(P0840)四、基本定位_回零(Homing / Reference)回零/寻参(Homing / Reference)回参考点模式(回零模式)只有使用增量编码器(旋转编码器Reserver、正/余弦编码器Sin/Cos 或脉冲编码器)时需要,因每次上电时增量编码器与轴的机械位置之间没有任何确定的关系。
S120的基本定位功能

S120的基本定位功能一、概述S120 有两种形式:用于多轴系统的DC/AC 装置用于单轴系统的AC/AC 装置这两种形式的Firmware V2.4 及以上版本都已具备基本定位功能。
当前V2.4 版本的S120具有如下定位功能:•点动(Jog):用于手动方式移动轴,通过按钮使轴运行至目标点•回零(Homing/Reference):用于定义轴的参考点或运行中回零•限位(Limits):用于限制轴的速度、位置。
包括软限位、硬限位•程序步(Traversing Blocks):共64个程序步,可自动连续执行一个完整的程序也可单步执行•直接设定值输入/手动设定值输入(Direct Setpoint Input / MDI):目标位置及运行速度可由上位机实时控制。
使用S120 基本定位功能的前提条件:调试软件:Starter V4.0 或更高版本/ SCOUT V4.0 或更高版本硬件版本:SINAMICS FW: V2.4 HF2 或更高版本注:安装SCOUT V4.0 需要STEP 7 版本至少为V5.3.3.1 以上二、激活基本定位功能S120的定位功能必须在变频器离线配置中激活,步骤如下:定位功能激活后可使用STARTER中的控制面板或专家参数表进行设置定位功能激活后可使用STARTER中的控制面板或专家参数表进行设置使用控制面板使用专家参数表使用控制面板的操作步骤:三、基本定位_点动(JOG)S120 中基本定位功能的点动有两种方式:•速度方式( travel endless):点动按钮按下,轴以设定的速度运行直至按钮释放。
•位置方式( travel incremental):点动按钮按下并保持,轴以设定的速度运行至目标位置后自动停止。
•使用控制面板的点动功能仅限于速度方式,位置方式需使用专家参数表设定。
•执行点动功能,应先使能变频器ON/OFF1(P0840)四、基本定位_回零(Homing / Reference)回零/寻参(Homing / Reference)回参考点模式(回零模式)只有使用增量编码器(旋转编码器Reserver、正/余弦编码器Sin/Cos 或脉冲编码器)时需要,因每次上电时增量编码器与轴的机械位置之间没有任何确定的关系。
S120的基本定位功能

S120的基本定位功能一、概述S120 有两种形式:用于多轴系统的 DC/AC 装置用于单轴系统的 AC/AC 装置这两种形式的 Firmware V2.4 及以上版本都已具备基本定位功能。
当前V2.4 版本的 S120具有如下定位功能:•点动 (Jog):用于手动方式移动轴,通过按钮使轴运行至目标点•回零 (Homing/Reference):用于定义轴的参考点或运行中回零•限位 (Limits):用于限制轴的速度、位置。
包括软限位、硬限位•程序步 (Traversing Blocks):共64个程序步,可自动连续执行一个完整的程序也可单步执行•直接设定值输入/手动设定值输入 (Direct Setpoint Input / MDI):目标位置及运行速度可由上位机实时控制。
使用 S120 基本定位功能的前提条件:调试软件:Starter V4.0 或更高版本 / SCOUT V4.0 或更高版本硬件版本:SINAMICS FW: V2.4 HF2 或更高版本注:安装 SCOUT V4.0 需要STEP 7 版本至少为 V5.3.3.1 以上二、激活基本定位功能S120的定位功能必须在变频器离线配置中激活,步骤如下:定位功能激活后可使用STARTER中的控制面板或专家参数表进行设置使用控制面板使用专家参数表使用控制面板的操作步骤:三、基本定位_点动(JOG)S120 中基本定位功能的点动有两种方式:•速度方式( travel endless):点动按钮按下,轴以设定的速度运行直至按钮释放。
•位置方式( travel incremental):点动按钮按下并保持,轴以设定的速度运行至目标位置后自动停止。
•使用控制面板的点动功能仅限于速度方式,位置方式需使用专家参数表设定。
•执行点动功能,应先使能变频器ON/OFF1(P0840)四、基本定位_回零(Homing / Reference)回零/寻参(Homing / Reference)回参考点模式(回零模式)只有使用增量编码器(旋转编码器Reserver、正/余弦编码器Sin/Cos 或脉冲编码器)时需要,因每次上电时增量编码器与轴的机械位置之间没有任何确定的关系。
S120基本定位S7-300通讯
S7-300DP通讯控制S120完成基本定位功能一.通过DP总线实现S7-300与SINAMICS S120通讯1.1 DP总线通讯功能S7-300与SINAMICS S120之间DP通讯借助于系统功能块SFC14/SFC15进行周期性数据通讯。
周期性数据交换指的是数据的实时交换,如控制字和设定值。
1.2 DP地址设定驱动侧,S120上通过拨码开关来设置DP地址,设定范围为1-126.当所有拨码拨至ON或者OFF状态时,通过P918参数设置DP地址。
1.3 STEP7硬件配置在STEP7中新建项目,点击Insert-Station-2. Simatic 300 Station打开硬件组态,新建DP NETWORK,在CATALOG中选择相应S120产品,如SINAMICS S120 CU320,将其加入DP总线,DP地址设置应与驱动侧设置地址一致。
选择相应的S120Firmware版本,如V2.5此时会要求选择Message frame,点击选中Object1,然后点击Delete slot, 这时Message frame selection为None。
点击OK。
保存编译硬件组态,将其下载至PLC中。
注:此时仅将PLC硬件配置完成,S7-300与S120之间通讯尚未建立,CPU会BF灯亮,SF等闪烁,S120侧LED DP灯不亮。
1.4 S120配置打开STEP7,此时会出现SINAMICS S120 CU320,点击Open Object打开S120项目。
打开S120项目后,选择在线Connect to target system若是新的CF卡可选择自动配置Automatic Configuration,通过DRIVE-CLIQ 口将S120硬件配置装载至PG电脑。
若是旧CF已有配置,可选择工厂复位,将参数复位到出厂状态。
点击Start automatic configuration按钮,开始自动配置提示选择S120驱动类型,选择SERVO伺服方式。
S120的基本定位功能

S120的基本定位功能一、概述S120 有两种形式:用于多轴系统的DC/AC 装置用于单轴系统的AC/AC 装置这两种形式的Firmware V2.4 及以上版本都已具备基本定位功能。
当前V2.4 版本的S120具有如下定位功能:•点动(Jog):用于手动方式移动轴,通过按钮使轴运行至目标点•回零(Homing/Reference):用于定义轴的参考点或运行中回零•限位(Limits):用于限制轴的速度、位置。
包括软限位、硬限位•程序步(Traversing Blocks):共64个程序步,可自动连续执行一个完整的程序也可单步执行•直接设定值输入/手动设定值输入(Direct Setpoint Input / MDI):目标位置及运行速度可由上位机实时控制。
使用S120 基本定位功能的前提条件:调试软件:Starter V4.0 或更高版本/ SCOUT V4.0 或更高版本硬件版本:SINAMICS FW: V2.4 HF2 或更高版本注:页脚内容1安装SCOUT V4.0 需要STEP 7 版本至少为V5.3.3.1 以上二、激活基本定位功能S120的定位功能必须在变频器离线配置中激活,步骤如下:页脚内容2定位功能激活后可使用STARTER中的控制面板或专家参数表进行设置定位功能激活后可使用STARTER中的控制面板或专家参数表进行设置使用控制面板使用专家参数表页脚内容3使用控制面板的操作步骤:三、基本定位_点动(JOG)S120 中基本定位功能的点动有两种方式:•速度方式( travel endless):点动按钮按下,轴以设定的速度运行直至按钮释放。
•位置方式( travel incremental):点动按钮按下并保持,轴以设定的速度运行至目标位置后自动停止。
•使用控制面板的点动功能仅限于速度方式,位置方式需使用专家参数表设定。
•执行点动功能,应先使能变频器ON/OFF1(P0840)页脚内容4四、基本定位_回零(Homing / Reference)回零/寻参(Homing / Reference)回参考点模式(回零模式)只有使用增量编码器(旋转编码器Reserver、正/余弦编码器Sin/Cos 或脉冲编码器)时需要,因每次上电时增量编码器与轴的机械位置之间没有任何确定的关系。
S120的基本定位功能资料讲解
S120的基本定位功能S120的基本定位功能一、概述S120 有两种形式:用于多轴系统的 DC/AC 装置用于单轴系统的 AC/AC 装置这两种形式的 Firmware V2.4 及以上版本都已具备基本定位功能。
当前V2.4 版本的 S120具有如下定位功能:•点动 (Jog):用于手动方式移动轴,通过按钮使轴运行至目标点•回零 (Homing/Reference):用于定义轴的参考点或运行中回零•限位 (Limits):用于限制轴的速度、位置。
包括软限位、硬限位•程序步 (Traversing Blocks):共64个程序步,可自动连续执行一个完整的程序也可单步执行•直接设定值输入/手动设定值输入 (Direct Setpoint Input / MDI):目标位置及运行速度可由上位机实时控制。
使用 S120 基本定位功能的前提条件:调试软件:Starter V4.0 或更高版本 / SCOUT V4.0 或更高版本硬件版本:SINAMICS FW: V2.4 HF2 或更高版本注:安装 SCOUT V4.0 需要STEP 7 版本至少为 V5.3.3.1 以上二、激活基本定位功能S120的定位功能必须在变频器离线配置中激活,步骤如下:定位功能激活后可使用STARTER中的控制面板或专家参数表进行设置定位功能激活后可使用STARTER中的控制面板或专家参数表进行设置使用控制面板使用专家参数表使用控制面板的操作步骤:三、基本定位_点动(JOG)S120 中基本定位功能的点动有两种方式:•速度方式( travel endless):点动按钮按下,轴以设定的速度运行直至按钮释放。
•位置方式( travel incremental):点动按钮按下并保持,轴以设定的速度运行至目标位置后自动停止。
•使用控制面板的点动功能仅限于速度方式,位置方式需使用专家参数表设定。
•执行点动功能,应先使能变频器ON/OFF1(P0840)四、基本定位_回零(Homing / Reference)回零/寻参(Homing / Reference)回参考点模式(回零模式)只有使用增量编码器(旋转编码器 Reserver、正/余弦编码器Sin/Cos 或脉冲编码器)时需要,因每次上电时增量编码器与轴的机械位置之间没有任何确定的关系。
S120的基本定位功能

S120的基本定位功能Basic Position Function of S120摘要:本文介绍了S120 Firmware V2.4 及以上版本的基本定位功能,包括: 点动、回零、限位、 程序步、直接设定值输入/手动设定值输入。
关键词:SINAMICS S120 、基本定位。
Key words:SINAMICS S120 、Basic Position.目录一、概述 (4)二、激活基本定位功能 (4)三、基本定位_点动(JOG) (6)四、基本定位_回零(Homing / Reference) (7)4.1设置参考点 (Set_Reference) (7)4.2主动回零(Active Homing) (8)4.3动态回零(Passive Homing) (10)五、基本定位_限位(Limit) (12)六、基本定位_程序步(Traversing Blocks) (13)七、手动数据输入(MDI) (16)7.1 MDI 模式配置如下图所示 (17)7.2 激活 MDI 方式及参数配置 (17)7.3 调试参数 (18)一、概述S120 有两种形式:用于多轴系统的 DC/AC 装置用于单轴系统的 AC/AC 装置这两种形式的 Firmware V2.4 及以上版本都已具备基本定位功能。
当前V2.4 版本的 S120具有如下定位功能:• 点动 (Jog): 用于手动方式移动轴,通过按钮使轴运行至目标点• 回零 (Homing/Reference):用于定义轴的参考点或运行中回零• 限位 (Limits):用于限制轴的速度、位置。
包括软限位、硬限位• 程序步 (Traversing Blocks): 共64个程序步,可自动连续执行一个完整的程序也可单步执行• 直接设定值输入/手动设定值输入 (Direct Setpoint Input / MDI):目标位置及运行速度可由上位机实时控制。
使用 S120 基本定位功能的前提条件:调试软件:Starter V4.0 或更高版本 / SCOUT V4.0 或更高版本硬件版本:SINAMICS FW: V2.4 HF2 或更高版本注:安装 SCOUT V4.0 需要STEP 7 版本至少为 V5.3.3.1 以上二、激活基本定位功能1. 离线3驱动配置2. 配置4.激活基本定位3定位功能激活后可使用STARTER中的控制面板或专家参数表进行设置定位功能激活后可使用STARTER中的控制面板或专家参数表进行设置使用控制面板 使用专家参数表113.打开参数表23.打开控制面板2使用控制面板的操作步骤:三、基本定位_点动(JOG)S120 中基本定位功能的点动有两种方式:• 速度方式( travel endless):点动按钮按下,轴以设定的速度运行直至按钮释放。
S120的基本定位功能
S120的基本定位功能一、概述S120 有两种形式:用于多轴系统的DC/AC 装置用于单轴系统的AC/AC 装置这两种形式的Firmware V2.4 及以上版本都已具备基本定位功能。
当前V2.4 版本的S120具有如下定位功能:•点动(Jog):用于手动方式移动轴,通过按钮使轴运行至目标点•回零(Homing/Reference):用于定义轴的参考点或运行中回零•限位(Limits):用于限制轴的速度、位置。
包括软限位、硬限位•程序步(Traversing Blocks):共64个程序步,可自动连续执行一个完整的程序也可单步执行•直接设定值输入/手动设定值输入(Direct Setpoint Input / MDI):目标位置及运行速度可由上位机实时控制。
使用S120 基本定位功能的前提条件:调试软件:Starter V4.0 或更高版本/ SCOUT V4.0 或更高版本硬件版本:SINAMICS FW: V2.4 HF2 或更高版本注:安装SCOUT V4.0 需要STEP 7 版本至少为V5.3.3.1 以上二、激活基本定位功能S120的定位功能必须在变频器离线配置中激活,步骤如下:定位功能激活后可使用STARTER中的控制面板或专家参数表进行设置定位功能激活后可使用STARTER中的控制面板或专家参数表进行设置使用控制面板使用专家参数表使用控制面板的操作步骤:三、基本定位_点动(JOG)S120 中基本定位功能的点动有两种方式:•速度方式( travel endless):点动按钮按下,轴以设定的速度运行直至按钮释放。
•位置方式( travel incremental):点动按钮按下并保持,轴以设定的速度运行至目标位置后自动停止。
•使用控制面板的点动功能仅限于速度方式,位置方式需使用专家参数表设定。
•执行点动功能,应先使能变频器ON/OFF1(P0840)四、基本定位_回零(Homing / Reference)回零/寻参(Homing / Reference)回参考点模式(回零模式)只有使用增量编码器(旋转编码器Reserver、正/余弦编码器Sin/Cos 或脉冲编码器)时需要,因每次上电时增量编码器与轴的机械位置之间没有任何确定的关系。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
S120的基本定位功能一、概述S120 有两种形式:用于多轴系统的DC/AC 装置用于单轴系统的AC/AC 装置这两种形式的Firmware V2.4 及以上版本都已具备基本定位功能。
当前V2.4 版本的S120具有如下定位功能:•点动(Jog):用于手动方式移动轴,通过按钮使轴运行至目标点•回零(Homing/Reference):用于定义轴的参考点或运行中回零•限位(Limits):用于限制轴的速度、位置。
包括软限位、硬限位•程序步(Traversing Blocks):共64个程序步,可自动连续执行一个完整的程序也可单步执行•直接设定值输入/手动设定值输入(Direct Setpoint Input / MDI):目标位置及运行速度可由上位机实时控制。
使用S120 基本定位功能的前提条件:调试软件:Starter V4.0 或更高版本/ SCOUT V4.0 或更高版本硬件版本:SINAMICS FW: V2.4 HF2 或更高版本注:安装SCOUT V4.0 需要STEP 7 版本至少为V5.3.3.1 以上二、激活基本定位功能S120的定位功能必须在变频器离线配置中激活,步骤如下:定位功能激活后可使用STARTER中的控制面板或专家参数表进行设置定位功能激活后可使用STARTER中的控制面板或专家参数表进行设置使用控制面板使用专家参数表使用控制面板的操作步骤:三、基本定位_点动(JOG)S120 中基本定位功能的点动有两种方式:•速度方式( travel endless):点动按钮按下,轴以设定的速度运行直至按钮释放。
•位置方式( travel incremental):点动按钮按下并保持,轴以设定的速度运行至目标位置后自动停止。
•使用控制面板的点动功能仅限于速度方式,位置方式需使用专家参数表设定。
•执行点动功能,应先使能变频器ON/OFF1(P0840)四、基本定位_回零(Homing / Reference)回零/寻参(Homing / Reference)回参考点模式(回零模式)只有使用增量编码器(旋转编码器Reserver、正/余弦编码器Sin/Cos 或脉冲编码器)时需要,因每次上电时增量编码器与轴的机械位置之间没有任何确定的关系。
因此轴都必须被移至预先定义好的零点位置。
即执行Homing 功能。
当使用绝对编码器( Absolute ) 时每次上电不需重新回零。
S120 中回零有三种方式:•直接设定参考点(Reference): 对任意编码器均可•主动回零(Reference point approach): 主要指增量编码器•动态回零(Flying Reference):对任意编码器均可4.1设置参考点(Set_Reference)通过用户程序可设置任意位置为坐标原点。
通常情况下只有当系统即无接近开关又无编码器的零脉冲时,或者当需要轴被设置为一个不同的位置时才使用该方式操作步骤(已设定开关量输入点DI2 为ON/OFF1命令源P840)1. 进入“Homing”2. 连接一数字量输入点( DI 1 )至参数P2596作为设置参考点信号位,该位上升沿有效3. 设定参考点位置坐标值P2599(如0)4. 闭合DI 2运行使能5. 闭合DI 1 激活“设置参考点”命令,于是该轴当前位置r 2521 立即被置为P2599 中设定的值。
如r2521=04.2主动回零(Active Homing)主动回零方式只适用于增量编码器,绝对值编码器只需在初始化阶段进行一次编码器校准,以后不必做回零主动回零有三种方式:仅用编码器零标志位( Encoder Zero Mark ) 回零仅用外部零标志( External Zero Mark ) 回零使用接近开关+ 编码器零标志位( Homing output cam + Zero Mark ) 回零4.2.1绝对值编码器的主动回零如果我们使用绝对值编码器并且作主动回零时会看到如下页面:4.2.2增量编码器的主动回零依下图所示进行配置相关参数设定1. 进入“Homing “(回零) 页面2. 定义开关量输入点DI 1为开始寻参命令(参数P2595=722.0)3. 回零方式选择主动回零P2597=04. 定义开关量输入点DI 2为接近开关P2612= 722.1(粗脉冲)5. 指定轴运行极限点,如果回零过程中极限点到达(P2613/P2614=0)则轴反转。
若两点全为零则轴停止。
6. 指定回零方式:接近开关+ 编码器零脉冲7. 指定回零开始方向P2604 (0:正向;1:反向)动作过程:变频器运行ON/OFF1闭合,DI 1闭合,开始寻参过程•上图中(Step1)轴按照P2604 定义的搜索方向,以最大加速度P2572 加速至搜索速度P2605,到达接近开关后(DI 2 闭合),以最大减速度P2573减速停止,进入下一步:搜索编码器的零脉冲•轴反向加速至速度P2608,离开接近开关后(DI 2 断开)遇到的编码器的第一个零脉冲后轴停止。
进入下一步:回参考点•上图中(Step3)轴反向加速以速度P2611运行偏置距离P2600后停止在参考点,完成主动回零过程。
4.3动态回零(Passive Homing)Passive Homing (动态回零)又称为Homing on the fly动态回零用于轴工作于任意定位状态时动态修改当前位置值为零(如:在点动时、执行程序步时,执行MDI 时),执行动态回零后并不影响轴当前的运行状态,轴并不是真正的回到零点而只是其当前位置值被置为0,重新开始计算位置。
前提条件:P2597=1绝对值编码器的动态回零:参数设定•打开“Homing “(回零) 页面•定义开始寻参命令P2595源(如开关量输入点DI2)•回零方式选择动态回零P2597=1•指定接近开关Bero为上升沿有效(如上图中P2511)•定义开关量输入点DI 10(只能为快速I / O)为接近开关P488= 722.10(如上图中2)动作过程:•变频器运行(使能ON/OFF1),选择任意一种命令(如点动,程序步、MDI等)轴按照所选择的方式运行•闭合DI 2,开始动态回零•闭合快速开关DI 10(下图中红色线为该开关状态),可见到位置实际值立即恢复为0,后重新计值(如图中绿色线所示),在整个动态回零过程中轴的运行速度不受影响。
五、基本定位_限位(Limit)S120 中包含两种限位功能:软限位、硬限位。
以限制轴运行范围。
同时还有对轴运行速度,加减速的限制。
如下图所示激活限位方式•项目导航栏中选择限位功能块•激活软限位P2582 =1,正/反向位置范围通过P2578, P2579设定•激活硬限位P2568 =1,硬限位位置开关源P2569, P2570•最大速度:P2571、最大加速度:P2572、最大减速度:P2573注:限位开关信号为“低“有效到达硬限位后轴将以最大减速度P2573 故障停车,即使故障复位后也只允许反向运行六、基本定位_程序步(Traversing Blocks)通过使用Traversing Blocks _ “程序步”模式可以自动执行一个完整的定位程序,也可实现单步控制;各程序步之间可通过数字量输入信号切换。
但只有当前程序步执行完后下一程序步才有效。
在S120 中提供了最多64个程序步供使用。
程序步执行步骤:1. 项目导航栏中选择Traversing Blocks 模式,设定开关量输入点DI4用于激活程序步功能2. 不拒绝任务P2641= r722.2=1、没有停止命令P2640=1运行过程中P2640=0发出停止命令,则轴将以减速度P2620减速停车。
若断开DI 3 ( r722.2=0 )发出拒绝任务命令,则轴将以最大减速度P2573减速停车。
3. 按工艺需要设定各个程序步参数,程序步代号决定程序的执行顺序。
代号为-1表示该步不执行(初始代号全部为-1)。
4. 通过6个数字量输入点的不同组合选择需要的程序步5. 变频器运行,闭合DI 4(r722.3=1)激活Traversing 方式( P2631=1有效)轴按设定步骤运行。
结构说明:P2616 (No.) 每个程序步都要有一个任务号,运行时依此任务号顺序执行(-1 表示无效的任务)P2621 (Job ) 表示该程序步的任务。
有7 种任务供选择:Positioning (位置方式)、Endless_POS / Endless_NEG(正/ 反向速度方式)、Waiting(等待parameter 中指定的时间后执行下一步)Goto(跳转到parameter中指定的程序步)Set_O / Reset_O(置位/复位parameter 中指定的开关量输出点)P2622 ( Parameter ) 依赖于不同的Job,对应不同的Job有不同的含义(参见List Manual)P2623.8/9 ( Mode ) 定义定位方式,仅当任务( Job )为位置方式( Position ) 时有效P2617/P2618/P2619/P2620 ( Position, Velocity, Acceleration, Deceleration ) 指定运动的位置,速度,加/减速P2623.4/5/6 ( Advance ) 制定本任务结束方式。
END: 本任务结束不连续执行下一任务,Continue_With_Stop: 本任务结束准确定位,电机停止后重新启动开始下一任务。
Continue_Flying: 本任务结束连续执行下一任务。
P2623.0 ( Hide ) 跳过本条程序步不执行该任务。
依赖于Job 的方式,Configuration of digital output 仅当Job 设定为SET_O / RESET_O时有效,用于设定开关量输出。
示例:编制一段程序:以速度700 LU/min,加/ 减速为100% 运行相对位置50000 LU 减速停止;等待30ms;再以速度600 LU/min,加/ 减速为100% 运行相对位置40000 LU 减速停止。
编制程序步如下:七、手动数据输入(MDI)Direct Setpoint Input / MDI (直接设定点输入方式/手动数据输入方式), MDI 的缩写来自于NC 技术“Manual Data Input ”使用MDI 功能我们可以很轻松地通过外部控制系统来实现复杂的定位程序,通过由上位机控制的连续变化的位置、速度来满足我们的工艺需要。
MDI 有两种不同模式:•位置( position) 模式P2653=0、•手动定位或称速度模式( setting up ) P2653=1这两种模式可在线切换速度模式是指轴按照设定的速度及加/减速运行,不考虑轴的实际位置。