堆垛机说明书整理.doc
堆垛机操作手册_[全文]
![堆垛机操作手册_[全文]](https://img.taocdn.com/s3/m/900eebeadd36a32d72758179.png)
堆垛机操作手册_[ 全文]堆垛机操作手册一、全自动堆垛机操作步骤:1,合上电源总闸,堆垛机电机箱和出入库电机箱的电源指示灯亮2,将堆垛机电机箱和出入库电机箱上的手动/ 自动开关都切换到自动档, 且保证急停按钮未按下3,运行立体库操作软件,在报警信息页面中查看当前实际位置是否正确,如不正确,输入正确的位置4,在立体库操作软件任务分配页面中选择要执行的任务,点击开始任务按钮5,等待 5 秒钟左右,堆垛机会自动完成任务中的全部工作二、中央控制室立体库操作软件的使用方法:1,在中央控制室的电脑桌面上点击立体库,即进入到立体库操作软件,该软件共有三页画面,第一页为启动画面,第二页为任务分配画面,第三页为报警信息画面。
2 ,启动后显示第一页启动画面,该画面上有二个按钮,分别为任务分配按钮和报警信息按钮,点击它们分别进入到任务分配画面和报警信息画面。
还有一个远程驱动选项,选择远程驱动,本机则不能操作,只能由仓储配送中心施行出入库。
3,进入到任务分配画面后,设置任务方式及任务目标,任务方式分为出库和入库; 任务目标为排、层、列即需要出入库的目标仓位。
任务方式和任务目标全部用下拉菜单来选择,设定好任务方式(选择出库时同时要选择出口,即货物出库后从那个出口分拣出来)和任务目标后,按添加按钮,任务加入到任务栏中,任务栏中会显示刚才添加的任务。
任务栏分为四列,任务栏第一列为源排层列,出库时该列才有数据; 任务栏第二列为目的排层列,入库时该列才有数据, 它们都是四位数据,格式为: 第一位数据为排,第二位为层,第三、四位为列; 任务栏第三列为去向,出库时该列才有用,入库时该列数据不起作用; 任务栏第四列为标志,标志一直为1,表示需要施行该任务。
如果在添加任务时把不需要的任务添加进去了或者任务方式和任务目标选择错了,可以选中错误任务,按删除按钮把它删掉。
任务可以添加多条,但任务栏中必须要全部为出库或入库,添加完毕后,点击开始任务。
双立柱式堆垛机操作维护说明书
巷道宽度(mm): 1800
⑴运行机构
定位方式:检测片
停准精度:±10mm
驱动功率:2.2/3.8kw(△/Y),380V,50/100Hz,IP54,F级
⑵起升机构
定位方式:光电传感器+检测片
停准精度:±10mm
驱动功率:5.5/9.5(Y/△),380/220V,50/87HZ,IP54,F级
4.4货叉伸缩机构
货叉伸缩机构是堆垛机存取货物的执行机构,装设于载货台上,为减小巷道宽度,且有足够的伸出距离,采用链条传动三层伸缩货叉结构。货叉由上层叉,中层叉和下层叉(固定叉)组成,能够向堆垛机左右两侧伸叉作业(图4)。根据用户要求和托盘(货箱)结构可分为单叉、双叉或多叉式,货叉伸缩行程根据巷道宽度和货格深度确定。货叉驱动机构是由减速电机经过链轮、链条和限力矩联轴器、带动货叉传动套筒滚子链来使中、上叉作伸缩运动。减速电机选用带常闭式电磁制动功能的电机。限力矩联轴器的作用是防止货叉伸出时发生卡住或遇障碍物而损坏电动机。
2 主要技术参数
电 源:三相交流, 380V±10%, 50Hz
运行速度(m/min):5-90 变频调速
起升速度(m/m
单元规格(L×W×Hmm):1800×1400×1720(一区)/1020(二区)
货叉最高位置标高(mm):5183(一区)/5783(二区)
4 主要结构与工作原理
本堆垛机由金属结构(包括立柱、上横梁、下横梁)、起升机构、运行机构、货叉伸缩机构、载货台、电器控制柜等各大部件组成(如图1),其特点如下:
4.1金属结构
金属结构是堆垛机的主要承载件之一,它由立柱,上横梁和下横梁等几个部件组成。它的上部安装滑轮或链轮机构,上水平导轮,电缆拖挂机构或滑触线供电装置。中部或下部安装起升机构,立柱内侧安装升降导轨,使载货台平稳上升及下降。下部安装主动及被动车轮,运行驱动装置及下水平导轮,缓冲器等部件;后部和两侧安装有电器控制柜和上升及下降终端限位开关和选层认址板等部件,整个结构布局紧凑,强度高,刚性好。
系统说明文档(堆垛机部分)

天津市供电公司电能计量资产智能管理系统说明全自动立体库房硬件主要由堆垛机、货架、输送链、控制台四大部分组成,控制软件主要由组态软件构成,整个系统的自动化程度很高,无需人为控制。
本文介绍手动操作之后,重点说明自动控制部分。
1.将堆垛机控制柜上的“手动/自动”开关打到手动档(图示位置,PLC输入点I0.1亮)2.在操作过程中面对堆垛机控制柜,点动一下“向上”按钮,叉伸平台即会向上移动一个位置;点动一下“向下”按钮,叉伸平台即会向下移动一个位置;点动一下“前”按钮,堆垛机即会向前方移动一个位置;点动一下“向后”按钮,堆垛机即会向后方移动一个位置;点动一下“向右”按钮,叉板就会向右边移动一个位置;点动一下“向左”按钮,叉板就会向左边移动一个位置。
当到达某个位置时堆垛机会自动停下。
在叉板伸出后点动“向前”“向后”按钮将不会有任何反应,此时需点动“向左”或“向右”按钮使叉板回到中间位置。
这样就起到了一个保护的作用。
3.堆垛机位置的确定:货仓从左至右依次是1-14列,从下至上1—7层。
立体货仓的仓位地址使用字符串表示:前两位表示仓位所在行,用A2表示;中间两位是堆垛机的所在列;后两位是堆垛机的所在层。
如:“A20401”,表示堆垛机的当前所在位置为外面一行第4列第1层。
需要注意的是堆垛机叉板每层都有上下两个位置,用来抬起货物和放下货物。
正确的初始位置应该是在每层的下位。
将输送链和堆垛机电源全部打开后直接点击桌面上名为自动仓储系统的快捷方式,此时将同时打开条码扫描和组态王两个程序。
界面分别如下:图1.条码扫描程序图2.组态王程序进入运行界面后,要核对堆垛机当前所在的位置。
若实际位置和软件显示不符,请点击堆垛机复位按钮。
(请勿在堆垛机运行时点击)如果出现以下界面说明是条码扫描程序已经打开。
出现建立DDE失败的情况说明在组态王软件打开时,条码扫描程序未能打开。
堆垛机的出入库指令由管理软件来发,堆垛机自动执行该任务。
型钢堆垛机说明书

摘要型钢堆垛机是一种省力、省资源的一种对成型钢材自动打捆的设备,型钢堆垛机系统结构简单,自动化程度高,操作灵活方便,本文主要介绍了型钢堆垛机的总体方案设计和拨钢机构的设计,主要针对总体方案设计过程作了详细介绍,主要包括液压系统的方案设计、传动系统的方案设计、控制系统的方案设计、翻转机构的方案设计、升降机构的方案设计、定位机构的方案设计、移钢机构的方案设计,其中还对拨钢机构中轴的设计、减速器的选型、电机选择和链轮设计部分做了一些必要的说明。
关键字:型钢堆垛机总体方案设计拨钢AbstractSteel stacking machine is a labor-saving, resource saving an automatic bale of steel forming equipment, Steel stacker system is simple, highly automated, flexible operation,the paper introduces the overall scheme of steel stacker design and allocation of the design of steel bodies, mainly made for the overall design process , including the hydraulic system design, transmission design, control system design, flip design agency, lifting body design, positioning mechanism design, moving steel body design, which also dial the central axis of the design of steel bodies, gear selection, motor selection and chain design part of doing the necessary instructions.Keywords: stacker section overall scheme of steel stacker design dial steel目录摘要 (I)Abstract...................................................................................................................... I I 第1章概述 . (5)1.1磁性堆垛机 (6)1.2非磁性堆垛机 (7)第2章型钢堆垛机总体设计 (10)2.1 设计型钢堆垛机应考虑的问题 (10)2.1.1 型钢堆垛机的设计参数 (10)2.1.2 型钢堆垛机的工艺参数 (11)2.1.3 堆垛机的工艺流程 (12)2.1.4 堆垛机平面示意图 (12)2.1.5 堆垛机的结构设计 (13)2.1.6 堆垛机总体尺寸 (14)2.2型钢堆垛机的总体方案设计 (14)2.2.1 单传辊道的方案设计 (14)2.2.2 传动系统的方案选择 (14)2.2.3 定位机构的方案设计 (16)2.2.4 液压系统的方案设计 (16)2.2.5 移钢机构的方案设计 (19)2.2.6 翻转机构的方案设计 (19)2.2.7 升降机构的方案设计 (20)2.2.8 控制系统的方案设计 (20)第3章拨钢机构的设计 (23)3.1 电动机和减速器的选择 (23)3.1.1 电动机类型的选择 (23)3.1.2 减速器的选择 (25)3.2 滚子链传动的设计 (25)3.2.1 链传动的特点及应用 (25)3.2.2 链传动的参数选择原则 (27)3.2.3 拨钢机构滚子链的设计 (27)3.2.4 链轮结构尺寸的确定 (29)3.2.5 链轮的选材及热处理 (30)3.2.6 链传动的润滑 (30)3.3 轴的设计与校核 (32)3.3.1 轴的结构工艺性 (32)3.3.2 轴的材料 (32)3.3.3 轴上的力分析 (33)3.3.3 轴一的校核 (35)3.3.4 确定轴一的各段尺寸和长度 (40)3.3.5 轴上零件的周向定位 (41)3.3.6 确定圆角和倒角的尺寸 (41)3.3.7 平键的校核 (41)3.4 螺栓的选择 (42)第四章经济性分析 (43)第5章结论 (44)参考文献 (45)致谢 (46)第1章概述堆垛机是用来将预定根数的成排的型钢码成紧密有序的方形或矩形钢材垛,然后送往打捆区进行捆扎以完成安全运输和储存的市场需要。
型钢堆垛机设计 设计说明书
摘要本文详细介绍了型钢堆垛机的整体设计理论和整个堆垛过程,其中重点介绍了翻转机构的设计。
主要包括了翻转机构的轴、齿轮、液压缸的整体设计,其中还有轴承的选取,联轴器的选取和校核。
本次设计的型钢自动堆垛机性能良好、动作灵活、操作方便、故障率低、维护简单方便,满足了生产的需要关键字:型钢堆垛机;机械;液压;齿轮AbstractThis article introduced Steel bar stacker Overall design theory and entire piles up the process in detail, and introduced the design of Turnover mechanism emphasis. In this paper, there has mainly included the entire design of the axis, the gear, hydraulic cylinder of turnover mechanism, and in that there were also including bearing's selection and shaft coupling's selection and examination.This profiled bar automate profiled bar stow machine has good capability, movement is agility, operating is simple; the frequency of trouble is small, maintenance is simple, and could meet the need of teaching and learningKey words:Steel bar stacker;Machinery;Hydraulic pressure;Gear目录摘要 ...................................................................................... 错误!未定义书签。
单立柱巷道堆垛机说明书..

本科毕业设计说明书题目:单立柱巷道堆垛机提升装置与载货台设计院(部):机电工程学院专业:机械工程及自动化班级:机械121班姓名:孙世良学号:20120711031指导教师:周海涛完成日期:2016年6月10日目录摘要 (1)ABSTRACT (2)1绪论 (3)1.1 单立柱巷道堆垛机的结构及研究意义 (3)1.2 堆垛机研究情况及评述 (3)1.3 课题关键问题及解决方法 (6)1.4 单立柱巷道堆垛机的设计参数 (8)2 单立柱巷道堆垛机提升装置设计 (9)2.1 单立柱巷道堆垛机的特点 (9)2.2 提升装置部分设计 (9)2.2.1柔性件的选取 (10)2.2.2 卷筒的选取 (10)2.2.3 电动机的选取 (10)2.2.4 减速器的选取 (11)2.2.5 制动器的选取 (12)2.3提升装置部分的计算 (13)2.3.1钢丝绳的计算 (13)2.3.2 卷筒的相关尺寸计算 (13)2.3.3电动机的计算 (15)2.3.4减速器的计算 (17)3 单立柱巷道堆垛机载货台设计 (18)3.1 载货台货叉方案设计 (18)3.2 堆垛机货叉设计计算 (20)3.2.1 伸缩货叉的挠度与强度 (20)3.2.2 下叉的受力分析计算 (20)3.2.3 中叉的受力分析计算 (21)3.2.4 上叉的设计分析计算 (23)3.3 货叉各参数的选择 (24)4堆垛机的控制装置及保护措施 (25)4.1堆垛机控制装置 (25)4.2堆垛机安全保护装置 (25)5 结论 (27)谢辞 (28)参考文献 (29)摘要本文详细论述了普遍应用在自动化立体仓库中的单立柱有轨巷道式堆垛机的设计方案。
文中对堆垛机的分类,特点及其构造进行了详细的叙述。
堆垛机是自动化立体仓库中最重要的起重堆垛设备,是随着立体仓库的出现而发展起来的专用起重机。
它能够在自动化立体仓库的巷道中来回穿梭运行,将放置在巷道口的货物存入指定的货格,或者从货格中取出货物运送到巷口。
堆垛机说明书资料
堆垛机说明书资料一、引言堆垛机是一种自动化物料搬运设备,广泛应用于仓储、物流和创造业等领域。
本文档旨在提供堆垛机的详细说明,包括设备的基本原理、结构组成、操作方法、安全注意事项等内容,以匡助用户正确使用和维护堆垛机。
二、设备概述1. 设备名称:堆垛机2. 设备型号:XYZ-12343. 设备用途:用于自动化堆垛和搬运物料4. 设备特点:高效、精确、可靠、安全5. 设备结构:包括底盘、立柱、升降机构、横移机构、夹具等部件三、工作原理堆垛机采用先进的控制系统和传感器,通过自动化程序实现物料的堆垛和搬运。
其工作原理如下:1. 感应:堆垛机通过激光、红外线等传感器感知物料的位置和尺寸。
2. 规划:根据感应结果,控制系统规划最佳的堆垛路径和搬运动作。
3. 动作:堆垛机根据规划结果,通过升降机构、横移机构和夹具等部件实现物料的堆垛和搬运。
4. 监控:控制系统实时监控设备运行状态和物料堆垛情况,确保工作安全和效率。
四、设备组成1. 底盘:提供设备的基本支撑和挪移功能。
2. 立柱:支撑升降机构和横移机构,实现垂直和水平方向的运动。
3. 升降机构:通过液压或者电动机驱动,实现物料的升降操作。
4. 横移机构:通过电动机驱动,实现物料的水平横移操作。
5. 夹具:用于夹持物料,确保安全和稳定的堆垛和搬运。
五、操作方法1. 开机准备:确认设备电源连接正常,检查各部件是否完好。
2. 参数设置:根据物料尺寸和堆垛要求,设置设备的工作参数,如堆垛高度、堆垛速度等。
3. 物料摆放:将待堆垛的物料放置在指定位置,确保物料整齐且不超出设备承载范围。
4. 操作控制:通过设备控制面板或者远程控制器,选择相应的操作模式和动作,启动堆垛机工作。
5. 监控与调整:在堆垛过程中,实时监控设备运行状态和物料堆垛情况,根据需要进行调整和干预。
6. 关机操作:在堆垛作业完成后,按照设备操作规程进行关机操作,断开电源并进行设备的清洁和维护。
六、安全注意事项1. 操作人员必须经过专业培训,熟悉设备的操作方法和安全规程。
(完整版)堆垛机安装指导书
堆垛机安装指导书一、总则1、 为了指导堆垛机安装及验收,确保质量和安全,制定本规范。
2、 安装施工应严格按图施工。
当施工时发现现场和设计图纸有不符之处,应及时提出,经双方批准变更后方可施工。
3、 安装中采用的各种计量和检测器具、仪器、仪表和设备应符合国家现行计量法规的规定,其精度等级不低于安装要求的精度等级。
4、 货架安装前的隐蔽工程应在工程隐蔽前进行检验,合格后方可继续施工。
5、 安装中应进行必要的自检,并作相应的记录。
堆垛机安装施工,除应按本规范执行外,还应符合国家(行业)现行标准规范的规定。
二、施工准备2.1施工条件➢ 安装施工前,应核对图纸,检查现场和图纸情况是否有出入;➢ 对立体库、特殊的或复杂的安装应事先编制施工方案,并备案留底;➢ 通往安装现场的道路必须畅通零部件应摆放在合理区域;➢ 现场安全(如不与治安条件冲突等);➢ 与其它项目工程队伍不存在作业冲突;➢ 安装施工前,现场屋面及内部粉刷等工程应基本完工,有关的基础地坪、沟道应已完工,其混凝土强度应不低于设计强度的75%;➢ 安装施工地点及附近的杂物、垃圾等,应清除干净;➢ 现场提供永久或临时性的照明设备;➢ 现场提供永久或临时性的电力供应;2.2收件检查和保管➢ 开包或开箱前,应对照发运清单进行检查,并做相应记录。
如发现散包、缺件、严重损坏时应及时反映,对散包、损坏、表面严重磨损的构件就地拍照,图像。
➢ 资料及时存档,并与供货商联系。
➢ 构件、机械和工具均应妥善保管,不得使其变形、损坏、错乱或丢失。
2.3.埋件(预置坑)检查➢预埋件(预置坑)的布置、几何尺寸和质量要求,应该符合图纸规定。
布置后或安装前应对预埋件(预置坑)进行复检。
三、组装、放线1、组装时应该对构件逐一进行校正,对组件进行尺寸核对,设立放线依据。
2、应按平面图和有关建筑物的轴线、边缘线及标高线,划定安装的基准线。
四、地脚螺栓装设地脚螺栓应符合下列要求:1、膨胀螺栓或化学螺栓,中心线应按图进行放线画线。
堆垛机控制方案
堆垛机控制⽅案⽅案说明书⽬录⼀概述 (1)1.1 产品特点...... ..... .. (1)1.2 ⽤途及适⽤范围 (1)1.3 品种规格 (2)1.4 型号的组成及代表意义 (2)1.5 使⽤环境条件及⼯作条件 (2)1.6 安全保护 (2)⼆安全⼯作的要求 (3)三结构特征 (4)3.1 ⾦属结构....................................................... . (5) 3.2 载货台........................................................ . (5) 3.3 ⽔平运⾏机构............................................ . (6) 3.3.1 直线型⽔平运⾏机构 (6)3.3.2 曲线转轨型⽔平运⾏机构 (7)3.4 起升机构....................................................... . (7) 3.5 货叉伸缩机构............................................... . (8) 3.6 过载松绳保护装置...................................... .. (9) 3.7 起升导向轮装置.......................................... .. (9) 3.8 超速保护装置 (9)四堆垛机PLC 功能介绍 (11)4.1 可编程控制器结构框图.......................... . (11) 4.2 模板简介.................................................. . (11) 4.2.1 S7- CPU313C 中央处理器 (11)4.2.2 电源....................................................... . (11) 4.2.3 SM321 输⼊模板 (12)4.2.4 SM322 数字输出模板 (12)4.2.5 CP 340 通讯处理器 (12)4.3 软件编制⽅式.......................................... . (12) 4.4 ⼯作原理............................................... . (12) 4.4.1 原理 (13)4.4.2 检测装置 (14)4.4.3 认址装置 (15)4.4.4 执⾏装置 (16)4.4.5 输出显⽰信号 (16)五操作⽅法....................................... ........ . (17)5.1 开机 (17)5.2 操作(有操作开关加OP3 操作和触摸屏操作) (17)5.2.1 操作开关加OP3 操作 (17)5.2.1.1 维修操作 (17)5.2.1.2 ⼿动操作 (17)5.2.1.3 单机⾃动操作 (17)5.2.1.4 任务输⼊ (18)5.2.1.5 操作步骤 (18)5.2.1.6 使⽤OP3 操作键盘进⾏任务输⼊ (18)5.2.1.7 任务执⾏ (20)5.2.2 触摸屏操作 (21)5.2.2.1 维修操作............................................................................................................................21.5.2.2.2 ⼿动操作 (22)5.2.2.3 单机⾃动操作 (22)5.2.2.4 联机操作 (23)5.2.2.5 现场信号的查询 (23)5.3 注意事项 (24)六⽇常维护与保养 (25)6.1 润滑 (25)6.1.1 ⽔平运⾏机构 (26)6.1.2 载货台 (27)6.1.3 驱动机构 (27)6.2 调整 (27)6.2.1 ⽔平导向轮调整 (27)6.2.2 起升导向轮调整 (27)6.2.3 上部导向轮调整 (28)6.2.4 超速保护装置的调整 (28)七常见故障处理 (30)7.1 堆垛机运⾏中故障处理 (30)7.2 堆垛机常见故障处理 (30)附表1 (31)附表2 (33)⼀概述1.1 产品特点整机结构紧凑,⾃重轻,稳定性好,并充分考虑⼈机⼯程学的要求。
双立柱堆垛机使用说明书
双立柱堆垛机使用说明书双立柱堆垛机使用说明书一、产品概述双立柱堆垛机是一种高效率、高精度的自动化仓储设备,广泛应用于物流配送、工厂仓库等场所。
该设备采用双立柱结构,具有稳定可靠、占用空间小、操作简单等优点。
双立柱堆垛机主要由货架、堆垛机主体、载货台和控制系统等组成。
二、产品特点和优势1、双立柱结构:采用高强度钢材制造,具有更高的稳定性和承载能力,能够承受较大的货物重量。
2、高效节能:采用高效电机和控制系统,具有快速、精准的定位和移动能力,大大提高了仓储效率。
3、操作简单:采用触摸屏或键盘输入方式,操作简单方便,无需专业技术人员指导。
4、安全可靠:设备配备多种安全保护装置,能够有效避免意外事故的发生,确保人身和货物安全。
5、可定制化:根据客户实际需求,可定制不同规格和功能的堆垛机,满足不同场合的使用需求。
三、使用步骤1、在使用前,先检查设备的外观和各部件是否完好无损,如有异常应及时维修或更换。
2、根据货物的重量和规格,选择合适的载货台和货架组合,确保货物能够稳定放置。
3、启动设备,将载货台移动到指定位置,然后通过控制面板或触摸屏输入货物信息,完成货物的入库操作。
4、当需要取出货物时,同样需要通过控制面板或触摸屏输入货物信息,然后将载货台移动到指定位置,取出货物。
5、设备运行过程中,如有异常情况发生,应立即停机检查,排除故障后方可继续使用。
四、常见故障及排除方法1、设备无法启动:检查电源是否正常、控制面板是否损坏等。
2、设备运行异常:检查电机是否正常、轨道是否有异物等。
3、货物无法放入:检查载货台是否倾斜、货架是否过高或过低等。
4、货物无法取出:检查载货台是否倾斜、货物是否卡住等。
五、注意事项1、设备运行过程中,禁止将手伸入设备内部,防止发生意外事故。
2、设备运行过程中,禁止随意更改货物信息或操作步骤。
3、设备运行过程中,应定期检查设备的运行状态和各项参数,确保设备正常运行。
4、设备长时间不使用时,应定期进行维护和保养,确保设备保持良好的工作状态。
轴承输送线堆垛机操作说明
轴承输送线/堆垛机操作说明书单位:广州市捷丰自动化设备有限公司地址:广州市白云区神山镇五丰工业区1号电话: 262613122011年9月1.电气控制系统。
本设备采用西门子可编程序控制器作为控制核心,其性能稳定,抗干扰性强,使用寿命长,维修方便。
在各相应工位均设置有可单独控制的启停控制按扭,控制工件的输送和进出,同时各工位均设置紧急停止按扭以便出现紧急状况时得以及时停车,在各相应显眼位置安装声光报警装置。
采用现在工业流行触摸屏操作和显示检修线的工况与运行状态,其操作方便,直观性强,具有故障自诊断和故障自动报警功能。
配合其它光电开关,接近开关,位置传感器等电子元件构成整个控制系统,实现全自动化智能输送控制工作。
2.触摸屏操作。
2.1合上电源控制开关,再合上电源总开关,触摸屏的原始画面如下。
(原始画面)2.2在面板上任一地方点击后显示:2.3点击“手动操作”按钮,显示如下:2.3.1输入用户名“1”和密码“1122”后按“ENT”键,点击“手动操作”按钮后显示如下:⑴、入口部分:点击“入口”按钮,显示如下:按住“前进”按钮,输送电机前进,按住“后退”按钮,输送电机退回;点击一下“托起”按钮,举升气缸升,点击一下“降下”按钮,举升气缸降;点击一下“横移伸”按钮,第一个入口蓝对准输送口,点击一下“横移收”按钮,第二个入口蓝对准输送口;点击一下“阻挡”按钮,放料气缸降,同时阻挡气缸伸出,点击一下“准入”按钮,放料气缸升,同时阻挡气缸收回。
⑵、堆垛机:可以在电脑上操作也可在触摸屏上操作,当要在触摸屏上控制操作时,在电脑画面中选择“触摸屏控制手动”如下图:然后在触摸屏“手动操作”画面中选择“堆垛机”进入如下画面:注意:手动控制堆垛机时必须把堆垛机电柜上的急停按钮按下。
按住“左行”按钮,堆垛机大车左行,按住“右行”按钮,堆垛机大车右行;按住“上升”按钮,堆垛机升,按住“下降”按钮,堆垛机降;按住“左叉进”按钮,左货叉前进,按住“左叉退”按钮,左货叉后退;按住“右叉进”按钮,右货叉前进,按住“右叉退”按钮,右货叉后退;按住“左叉回”按钮,左货叉回到中位,按住“右叉回”按钮,右货叉回到中位,当在电脑上控制时,先选择“电脑控制手动”,然后用鼠标点住哪个按钮,则堆垛机执行相应的动作。
堆垛机DQ511说明书3_故障报警
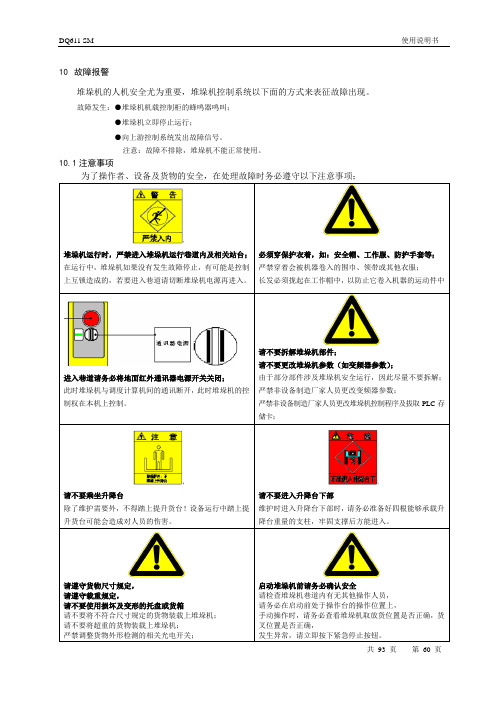
10故障报警堆垛机的人机安全尤为重要,堆垛机控制系统以下面的方式来表征故障出现。
故障发生:●堆垛机机载控制柜的蜂鸣器鸣叫;●堆垛机立即停止运行;●向上游控制系统发出故障信号。
注意:故障不排除,堆垛机不能正常使用。
10.1注意事项10.2故障画面的显示及操作堆垛机有故障时,在操作画面内(包含“手动控制”、“自动控制”、“在线控制”三个画面)将弹出故障按钮;点击可进入故障查询画面,进入故障信息画面,可以看到具体的故障信息;请排除故障,具体排除故障方法请参阅以下内容。
排除故障后,按下操作面板上蓝色复位按钮;10.3 堆垛机故障列表表一故障列表10.4 堆垛机故障排除方法10.4.2与升降相关故障排除方法10.4.3与货叉相关故障排除方法10.4.4其它故障排除方法10.4.5故障排除操作过程中需特别注意的事项在处理故障过程中,难免需要切换操作模式来处理相关故障,在切换操作模式过程中,将导致堆垛机因任务产生的运行步骤的调整,因此在处理故障时,若堆垛机有任务,则需先查看堆垛机的任务步骤当前执行的情况,切换操作模式处理完故障后,返回原操作模式需再次查看任务执行步骤的调整情况后再决定如何操作堆垛机。
1)任务步骤的概念:当堆垛机在单机、在线状态有任务被添加时,在“自动控制”和“在线控制”画面内将显示,此时点击进入“任务步骤查询”画面2)各步骤对应的堆垛机状态3)示例:当堆垛机在“在线操作”模式或是“单机操作”模式下发生故障时,请“点击查看任务步骤”按钮进入任务步骤查询画面查看任务执行的当前步骤;在任务查询画面内可以看到,当前任务执行到第4步收叉,此时堆垛机执行的任务是取货任务,此时故障需要手动处理才能复位(如左超长故障),此时需将操作模式转为手动,处理完故障后需切换回原操作模式“点击查看任务步骤”查询按钮查询任务步骤,可以看到任务步骤已调整为第1步跑位,此时需查看堆垛机的状态是否与2)条列表中第一步跑位状态一致,若不一致则需把堆垛机状态恢复到该步骤对应状态,若状态不一致启动堆垛机,则堆垛机将报警。
轴承输送线堆垛机操作说明
轴承输送线/堆垛机操作说明书单位:广州市捷丰自动化设备有限公司地址:广州市白云区神山镇五丰工业区1号电话: 262613122011年9月1.电气控制系统。
本设备采用西门子可编程序控制器作为控制核心,其性能稳定,抗干扰性强,使用寿命长,维修方便。
在各相应工位均设置有可单独控制的启停控制按扭,控制工件的输送和进出,同时各工位均设置紧急停止按扭以便出现紧急状况时得以及时停车,在各相应显眼位置安装声光报警装置。
采用现在工业流行触摸屏操作和显示检修线的工况与运行状态,其操作方便,直观性强,具有故障自诊断和故障自动报警功能。
配合其它光电开关,接近开关,位置传感器等电子元件构成整个控制系统,实现全自动化智能输送控制工作。
2.触摸屏操作。
2.1合上电源控制开关,再合上电源总开关,触摸屏的原始画面如下。
(原始画面)2.2在面板上任一地方点击后显示:2.3点击“手动操作”按钮,显示如下:2.3.1输入用户名“1”和密码“1122”后按“ENT”键,点击“手动操作”按钮后显示如下:⑴、入口部分:点击“入口”按钮,显示如下:按住“前进”按钮,输送电机前进,按住“后退”按钮,输送电机退回;点击一下“托起”按钮,举升气缸升,点击一下“降下”按钮,举升气缸降;点击一下“横移伸”按钮,第一个入口蓝对准输送口,点击一下“横移收”按钮,第二个入口蓝对准输送口;点击一下“阻挡”按钮,放料气缸降,同时阻挡气缸伸出,点击一下“准入”按钮,放料气缸升,同时阻挡气缸收回。
⑵、堆垛机:可以在电脑上操作也可在触摸屏上操作,当要在触摸屏上控制操作时,在电脑画面中选择“触摸屏控制手动”如下图:然后在触摸屏“手动操作”画面中选择“堆垛机”进入如下画面:注意:手动控制堆垛机时必须把堆垛机电柜上的急停按钮按下。
按住“左行”按钮,堆垛机大车左行,按住“右行”按钮,堆垛机大车右行;按住“上升”按钮,堆垛机升,按住“下降”按钮,堆垛机降;按住“左叉进”按钮,左货叉前进,按住“左叉退”按钮,左货叉后退;按住“右叉进”按钮,右货叉前进,按住“右叉退”按钮,右货叉后退;按住“左叉回”按钮,左货叉回到中位,按住“右叉回”按钮,右货叉回到中位,当在电脑上控制时,先选择“电脑控制手动”,然后用鼠标点住哪个按钮,则堆垛机执行相应的动作。
一种小型堆垛机-说明书摘要
一种便利型堆垛机,是由顶盖1、支撑架3、z向移动平板4货叉结构5,滚珠丝杠6、回转机构9和13、底座11、移动轮12及各种齿轮、齿条、电动机组成的,其特征在于:移动轮安装在底座的下面,y向移动板(下支承台)在底座上方,与底座间利用齿轮齿条传动电动机提供扭矩,回转齿轮固定连接在y 向移动板(下支承台)上,回转齿轮上端固定连接回转轴承,回转轴承上端螺栓连接上承重板。
上承重板上用螺栓连接一矩形镂空支承架,滚珠丝杠由上端盖连至上支撑台,z向移动平板连接在滚珠丝杠上可沿z轴方向移动,货叉结构和电动机分别通过螺栓连接在z向移动平板上,电动机输出轴端安装齿轮,且与回转齿轮啮合。
货叉结构由齿轮齿条啮合传动可在x向自由滑动。
注意事项
一、申请发明专利或者实用新型专利应当提交说明书摘要,一式一份。
二、说明书摘要文字部分应当打字或者印刷,字迹应当整齐清晰,黑色,符合制版要求,不得涂改,字高
在3.5毫米至4.5毫米之间,行距在2.5毫米至3.5毫米之间。
纸张应当纵向使用,只限使用正面,四周应当留有页边距:左侧和顶部各25毫米,右侧和底部各15毫米。
三、说明书摘要文字部分应当写明发明或者实用新型的名称和所属的技术领域,清楚反映所要解决的技术
问题,解决该问题的技术方案的要点及主要用途。
说明书摘要文字部分不得加标题,文字部分(包括标点符号)不得超过300个字,对于进入国家阶段的国际申请,其说明书摘要译文不限于300个字。
四、说明书摘要附图应当使用规定格式的表格绘制。
高速变速驱动器与抗摆功能的储物库堆垛机说明书

22 | October 2022 | Warehouses play a crucial role in the modern economy, and operators face constant pressure towork faster and more efficiently. To reduce material handling times and operational costs, automated storage and retrieval systems (AS/RS) have come to dominate the intralogistics industry. A common feature of these systems is the automated stacker crane.Stacker cranes that operate on rails in narrow aisles have become popular because they are effective, safe, and relatively inexpensive. Now, warehouse Stackers have become popular because they are effective, safe, and relatively inexpensive | October 2022 | 23contribute to lower construction and operational costs.For travel along the rails (x-axis), the standard ACS880-01 wall-mounted drive or ACS880-M04 drive module are ideal. They are cost effective as they use small resistors, and they include built-in anti-pendulum features, so no additional controllers or sensors are required. This enables the drive to deliver quick, accurate, robust and safe control with minimal effort. ABB’s TÜV-certified safety functions modules are easy to integrate into ACS880 drives, adding benefits such as Safely-Limited Speed (SLS), Safe Stop Emergency (SSE) and Safe Brake Control (SBC). Controlling safety functions over a safety fieldbus (PROFISAFE) reduces cabling needs. Where there are additional requirements, the AC500-S safety programmable logic controller can further safely monitor variables such as torque, acceleration, position, and more.For the forks which retrieve and place the pallets (z-axis), the ACS380 machinery drive is an appropriate choice. The compact size of this drive is well suited to warehouse applications as the units does not take up valuable space. Despite its small size, its combination of excellent motor control performance and basic crane features further enhances machine performance.PUTTING AN END TO THE SWAY ISSUEAnti-pendulum variable speed drives enable a facility to operate cranes efficiently at high speeds, maximizing throughput without compromising safety. Facilities that use this technology will secure a major advantage in a competitive industry. ●To learn more, visit https:///drives/segments/stacker-cranes ABB (ABBN: SIX Swiss Ex) is a leading global technology company that energizes the transformation of society and industry to achieve a more productive, sustainable future. By connecting software to its electrification, robotics, automation and motion portfolio, ABB pushes the boundaries of technology to drive performance to new levels. With a history of excellence stretching back more than 130 years, ABB’s success is driven by about 105,000 talented employees in over 100 countries. Reduced swing can be achieved by utilizing VSDs with an integrated anti-pendulum function。
Hyster RS46 容器堆垛机技术指南说明书
RS46 SERIES TECHNICAL GUIDE3,0481006,096100MAXIMUM CAPACITY CONTAINER PICKING END TO ENDMODEL20’40’kgkgRS46-2932,00014,000RS46-3335,00016,000RS46-3642,00020,000RS46-41S 44,90026,300RS46-41L 44,90026,300RS46-41LS 44,90030,300RS46-41XLS44,90030,3003W aA str 2r 1½ a½ aVb b b b b b b r 1 = radius of swing of container rear corner r 2 = radius of swing of container front corner W a = outside turning radius of the truck a = total operating clearance:= 200 mm (100 mm each side acc. VDI)see VDI line 4-34-3 & 4-34-4V = (theoretical) 90 ~ stacking aisle width, no intrusive stackingV = r 2 + the larger of r 1 or W aAst = (practical) 90 ~ stacking aisle width, no intrusive stackingand with clearance Ast = V + a(shown in 1,000 kg.)RATED CAPACITIES AND STACKING HEIGHTSMECHANICAL PILE SLOPEPOWERED PILE SLOPERS 46-29 CH CONTAINER SPREADER43454545452729292914141429142914291428144646464645279‘6” containers 8‘6” containers 4-44-5c 3c 2c 1c 3c 2c 14246464646464646464426.59‘6” containers 8‘6” containers4-44-528.527.528.528.513.513.513.513.528.528.528.528.513.513.513.5c 3c 2c 1c 3c 2c 1RS 46-33 CH CONTAINER SPREADER43464646463133333317171733173317331733174646464645319‘6” containers 8‘6” containers 4-44-5c 3c 2c 1c 3c 2c 14246464646464646464430.59‘6” containers 8‘6” containers4-44-532.532.532.532.516.516.516.516.532.530.532.532.516.516.516.5c 3c 2c 1c 3c 2c 1RS 46-41S CH CONTAINER SPREADER43464646463838383821212136213621362136214646464646369‘6” containers 8‘6” containers 4-44-5Stabilizer applied (truck static)Stabilizer NOT applied43464646464041414128282841284128412841284646464646369‘6” containers 8‘6” containers c 3c 2c 1c 3c 2c 1c 3c 2c 1c 3c 2c 142464646463737373720202037203720372037204646464645359‘6” containers 8‘6” containers4-44-5Stabilizer applied (truck static)Stabilizer NOT applied42464646463941414127272741274127412741274646464645359‘6” containers 8‘6” containers c 3c 2c 1c 3c 2c 1c 3c 2c 1c 3c 2c 1c 1c 2c 31865mm 3815mm 6315mmNote: All load centres c 1, c 2, c 3 are taken from the front face of the (front) Tyres, deduct 100mm for load centres taken from the front face of the stabiliser.RS 46-36 CH CONTAINER SPREADER43464646463636363619191936193619361936194646464646369‘6” containers 8‘6” containers 4-44-5c 3c 2c 1c 3c 2c 14246464646464646464535.59‘6” containers 8‘6” containers4-44-535.535.535.535.51919191935.535.535.535.5191919c 3c 2c 1c 3c 2c 1(shown in 1,000 kg.)RATED CAPACITIES AND STACKING HEIGHTSMECHANICAL PILE SLOPEPOWERED PILE SLOPERS 46-41L CH CONTAINER SPREADER43464646464041414123232341234123412341234646464646369‘6” containers 8‘6” containers 4-44-5c 3c 2c 1c 3c 2c 14040404035424646464646464646459‘6” containers 8‘6” containers4-44-52222222222222239404040c 3c 2c 1c 3c 2c 1RS 46-41LS CH CONTAINER SPREADER43464646464041414123232341234123412341234646464646369‘6” containers 8‘6” containers 4-44-5Stabilizer applied (truck static)Stabilizer NOT applied43464646464041414130303041304130413041294646464646369‘6” containers 8‘6” containers c 3c 2c 1c 3c 2c 1c 3c 2c 1c 1c 3c 242464646463940404022222240224022402240224646464645359‘6” containers 8‘6” containers4-44-5Stabilizer applied (truck static)Stabilizer NOT applied42464646463941414129292941294129412941284646464645359‘6” containers 8‘6” containers c 3c 2c 1c 3c 2c 1c 3c 2c 1c 3c 2c 1RS 46-41XLS CH CONTAINER SPREADER3646464646414141413232329‘6” containers 9‘6” containers4-44-5434646464641414141252525Stabilizer applied (truck static)Stabilizer NOT appliedc c c c c c Stabilizer applied (truck static)43464646464041414130303041304130413041294646464646369‘6” containers 8‘6” containers c c c c c c 3546464646414141413232329‘6” containers 9‘6” containers4-44-5434646464641414141252525Stabilizer applied (truck static)Stabilizer NOT appliedc c c c c c Stabilizer applied (truck static)42464646463941414129292941294129412941284646464645359‘6” containers 8‘6” containers c c c c c c HANDLING IN SECOND RAILr 2r 1RS 46-41XLS CH CONTAINER SPREADER (WTP WITH POWERED PILE SLOPE)354646464641414141323232c 3c 2c 19‘6” containers4-44-5434646464640404040242424Stabilizer applied(truck static)StabilizerNOT applied232323313121c 3c 2c 19‘6” containers r 2r 2Note: All load centres c 1, c 2, c 3 are taken from the front face of the (front) Tyres, deduct 100mm for load centres taken from the front face of the stabiliser.r 1r 21865mm 6400mmc 1c 2c 31865mm 3815mm 6315mm(shown in 1,000 kg.)RATED CAPACITIES AND STACKING HEIGHTSPOWERED PILE SLOPERS 46-24 IH SPREADERRS 46-28 IH SPREADER4-44-539454545452424242410.510.510.5452411452410.5452410.5452410.545244324c 3c 2c 1c 3c 2c 1c 3c 2c 19‘6” containers 8‘6” containersswap-bodies and containers 4-44-539454545452828282813131345281345281345281345281345284328c 3c 2c 1c 3c 2c 1c 3c 2c 19‘6” containers 8‘6” containersswap-bodies and containers RS 46-33 IH SPREADER RS 46-38L IH SPREADER4-44-539464646463333333316.516.516.5463316.5463316.5463316.5463316.546334333c 3c 2c 1c 3c 2c 1c 3c 2c 19‘6” containers 8‘6” containers swap-bodies and containers 4-44-539464646463638383820202046351846382046382046382046384333c 3c 2c 1c 3c 2c 1c 3c 2c 19‘6” containers 8‘6” containersswap-bodies and containers RS 46-38LS IH SPREADER4-44-539464646463638383820202046382046382046382046382046384333c 3c 2c 1c 3c 2c 1c 3c 2c 1Stabilizer NOT applied9‘6” containers 8‘6” containers swap-bodies and containers 4-44-539464646463638383827272746382746382746382746382746384333c 3c 2c 1c 3c 2c 1c 3c 2c 1Stabilizer applied (truck static)9‘6” containers 8‘6” containersswap-bodies and containers c 1c 2c 31865mm 3815mm 6315mmNote: All load centres c 1, c 2, c 3 are taken from the front face of the (front) Tyres, deduct 100mm for load centres taken from the front face of the stabiliser.RS 46-38S IH SPREADER4-44-539464646463535353518181846351846351846351846351846354333c 3c 2c 1c 3c 2c 1c 3c 2c 1Stabilizer NOT applied9‘6” containers 8‘6” containers swap-bodies and containers 4-44-539464646463638383825252546382546382546382546382546384333c 3c 2c 1c 3c 2c 1c 3c 2c 1Stabilizer applied (truck static)9‘6” containers 8‘6” containersswap-bodies and containers(shown in 1,000 kg.)RATED CAPACITIES AND STACKING HEIGHTSNote: All load centres c 1, c 2, c 3 are taken from the front face of the (front) Tyres, deduct 100mm for load centres taken from the front face of the stabiliser.c 1c 2c 31865mm 3815mm 6315mmPOWERED PILE SLOPE RS 46-41XLS IH SPREADER4-44-5394646464636383838222222463822c c c c c c Stabilizer NOT applied9‘6” containers swap-bodies and containers 4-44-5394646464636383838313131463831c c c c c c Stabilizer applied (truck static)9‘6” containersswap-bodies and containers RS 46 FOR STEEL LOAD HANDLINGRS 46 FOR COIL HANDLINGRS 46 FOR SLAB HANDLINGRS 46 FOR BARGE CONTAINER HANDLING1-1 891-1 1011G E N E R A L1-1Manufacturer HYSTER HYSTER HYSTER 1-2Model designation RS46 CH RS46 CH RS46 IH 1-3Powertrain / drivetrainDiesel Diesel Diesel N G I N E7-1Engine manufacturer / model Cummins / QSM11Cummins / QSM11Cummins / QSM117-1a EPA / CE Tier complianceTier 3 / Stage IIIATier 3 / Stage IIIATier 3 / Stage IIIA7-2Engine power output according to ISO 1585kW 2242502247-2-1Engine power output - peak kW 2242722247-3Rated speedrpm 2,1002,1002,1007-3-1Engine torque @rpm (1/min)N-m 1,424 @ 10001,674 @ 9001,424 @ 1000D R I V E8-1Drive control / transmissionType / #Hydrodynamic Transmission Hydrodynamic Transmission Hydrodynamic Transmission 8-2Transmission manufacturer / typeType / #Spicer Off-Highway / TE-27Spicer Off-Highway / TE-32Spicer Off-Highway / TE-278-4Transmission speeds forward / backward # 4 / 4 4 / 4 4 / 48-5CouplingType Torque Converter Torque Converter Torque Converter 8-6Wheel drive / drive axle manufacturer / type Type / #Kessler D102Kessler D102Kessler D1028-11Service brake Type Oil immersed (wet) disc Oil immersed (wet) disc Oil immersed (wet) disc 8-12Parking brakeTypeSpring applied, dry disc on drive axleSpring applied, dry disc ondrive axleSpring applied, dry disc on drive axleS P R E A D E R9-1Spreader manufacturer / typeType / #Elme / 817Elme / 817Elme / 8579-1-1Pile slope, mechanical without PPS °3339-1-2Pile slope, mechanical with PPS ° 1.5 1.5 1.59-1-3Pile slope, total with PPS °6669-3Size of containers feet (´)ISO 20’ - 40’ISO 20’ - 40’ISO 20’ - 40’9-4Side shiftb 8mm +800 / -800+800 / -800+800 / -8009-6-1Rotation angle, without override °+12 / -12+12 / -12+12 / -129-6-2Rotation angle, with override°+185 / -95+185 / -95+185 / -95M I S C 10-1Operating pressure for attachments bar 14014014010-2Oil volume for attachments l/min 11011011010-3Hydraulic oil tank, capacity l 62562562510-4Fuel tank capacity l83083083010-5Steering designHydrostaticHydrostaticHydrostatic10-6Number of steering rotation66610-7Sound pressure level at driver’s seat (7)LpazdB(A)73.973.973.910-7-1Sound power level during the workcycleLwazdB109109109NOTES:Specifications are affected by the condition of the vehicle and how it is equipped, as well as the nature and condition of the operating area. Inform your dealer of the nature and condition of the intended operating area when purchasing your Hyster ® truck.(1) Load capacities shown with mechanical pile slope (MPS) spreader. Deduction forusing powered pile slope spreader is approx. 900 kg (2) From face of front Tyres.(3) With Mechanical Pile Slope (MPS). For optional Powered Pile Slope (PPS) function:deduct 310 mm.(4) Full suspension seat in depressed position.(5) Spreader at 8.0 m high, central above front axle; container 0 mm in front of Tyres;includes 100 mm clearance.(6) Gradeability figures provided for comparison of tractive performance, but are notintended to endorse the operation of vehicle on the stated inclines.(7) Add 2 dB(A) for option with additional cab fan.All capacities are according to EN1459.All specifications and capacities are valid for trucks equipped with a Hyster ® container handling spreader for handling ISO containers.Safety: This truck conforms to the current EU requirements.NOTICE:Care must be exercised when handling elevated loads. Operators must be trained and must read, understand and follow the instructions contained in the Operating Manual.All values are nominal values and they are subject to tolerances. For further information, please contact the manufacturer.Hyster products are subject to change without notice.Lift trucks illustrated may feature optional equipment. Values may vary with alternative configurations.Specification data is based on VDI 2198.CERTIFICATION: Hyster lift trucks meet the design and construction requirements ofB56.1-1969, per OSHA Section 1910.178(a)(2), and also comply with the B56.1 revision in effect at time of manufacture. Certification of compliance with the applicable ANSI standards appears on the lift truck. Performance specifications are for a truck equipped as described under Standard Equipment on this Technical Guide. Performance specifications are affected by the condition of the vehicle and how it is equipped, as well as by the nature, condition of the operating area, proper service and maintenance of the vehicle. If these specifications are critical, the proposed application should be discussed with your dealer.NOTE: Specifications, unless otherwise listed, are for a standard truck without optional equipment.PERFORMANCECummins QSM11 diesel engine rated 224 kW Stage IIIA APPEARANCE STD OPT Hyster yellow paint base truck and spreader X Special paint base truck and spreader X ERGONOMICS STD OPT Powered partial-sliding cabin, including additional mirrors on top of fenders X Powered full-sliding cabin, including additional steps and handrails X Isolated mounting for low noise and vibration XCoat hook X Front, top and rear wipers XFront and rear window defrosters XLeft side handrails, stairway and cabin door XRH side door X Right side handrails and stairway X Stair lights X Multifunction display panel XSeat-side joystick hydraulic control X Steering wheel spinner knob X Directional control lever X Interior wide angle mirrors X Heater with 3 speed fan X Telescoping & tilting steering column X Recirculation fan X DC/DC converter 24 volt/12 volt with socket X 2nd 12 volt socket X Accessory mounting post X Rear locking console in cab X Heated top window X "H"-pattern front wiper X Air conditioning X Sun shades on top and rear X Radio preparation set-up (wiring, two speakers and antenna)X Reading light X Operator presence system X Mechanical suspension seat X Deluxe air suspension seat X Low backrest X High backrest XCloth seat cover XVinyl seat cover X Seat heating X 2-point high visibility seatbelt X3-point high visibility seatbelt X OPERATION STD OPT Electric air horn 112 dB X Visible alarm – Amber strobe light, key switch activated X Audible alarm – reverse direction activated 82–102 dB(A), self-adjusting X Forward motion alarm X Seatbelt interlock for engine start X Seatbelt indicator light on top of cab X Tyre pressure monitoring system X Lockable battery disconnect switch X Battery jump start connection (NATO plug)X Adjustable automatic “empty seat” engine shutdown X Trainer seat X Non-locking fuel cap X Lockable fuel cap X Hyster Tracker wireless asset management - monitoring X Hyster Tracker wireless asset management - access / verification X Auto greasing system for basic truck & outer boom X Auto greasing system for inner boom and spreader X 24 volt electrical system X Engine block heater 220 volt X Steer wheel lug nut protection X Engine compartment light XFRONT END EQUIPMENTSPREADER FOR BUKL LOAD HANDLINGISO CONTAINER TIPPING SPREADERINTERMODAL HANDLER SPREADERCONTAINER HANDLER SPREADERSISO CONTAINER SPREADER WITH MPSISO CONTAINER SPREADER WITH PPSTOOL CHANGER AND ATTACHMENTSTOOL CHANGERCH SPREADER FOR TOOL CHANGERSLAB HANDLER FOR TOOL CHANGERC-HOOK FOR TOOL CHANGERFRONT END EQUIPMENTSPREADER FOR BARGE HANDLING OVERSIZED LEG SPREADERwww.hyster.eu*********************/HysterEurope@HysterEurope/HysterEuropeSTRONG PARTNERS. TOUGH TRUCKS.TMFOR DEMANDING OPERATIONS, EVERYWHERE.Hyster® supplies a complete range of warehouse equipment, IC and electric counterbalanced trucks, container handlers and reach stackers. Hyster® is committed to being much more than a lift truck supplier.Our aim is to offer a complete partnership capable ofresponding to the full spectrum of material handling issues: whether you need professional consultancy on your fleet management, fully qualified service support, or reliable parts supply, you can depend on Hyster®.Our network of highly trained dealers provides expert,responsive local support. They can offer cost-effective finance packages and introduce effectively managed maintenance programmes to ensure that you get the best possible value. Our business is dealing with your material handling needs so you can focus on the success of your business today and in the future.HYSTER-YALE UK LIMITED trading as Hyster Europe. Registered Address: Centennial House, Building 4.5, Frimley Business Park, Frimley, Surrey GU16 7SG, United Kingdom.Registered in England and Wales. Company Registration Number: 02636775. HYSTER,and FORTENS are registered trademarks in the European Union and certain other jurisdictions.MONOTROL ® is a registered trademark, and DURAMATCH and are trademarks in the United States and in certain other jurisdictions.Printed in The Netherlands. Part number: 3990531 Rev. 01-06/17-TLCHYSTER EUROPECentennial House, Frimley Business Park, Frimley, Surrey, GU16 7SG, England.T el: +44 (0) 1276 538500。
堆垛机PLC说明书

广西大学《机电传动与控制》课程作业题目:基于PLC巷道堆垛机定位控制系统专业:机械工程学院物流工程专业班级:物流工程071班姓名:苏晓春指导教师:莫以为成绩:摘要现代社会物流概念已经备广泛接受,仓储作为物流活动的一个重要环节正在不断向自动化发展。
计算机自控技术的飞速发展,为现代企业的物流管理提供了重要的技术支持。
仓储技术的发展决定了仓储活动的效率,因此自动化仓储技术被广泛应用。
自动化立体仓库就是自控技术在物流管理上的一个很好的应用。
自动化立体仓库不仅具有节省用地、减轻劳动强度、提高物流效率、降低储运损耗、减少流动资金积压等功能,而且在沟通物流信息、衔接产需、保证生产均衡、合理利用资源、进行科学储备与生产经营决策等方面发挥着独特的作用,使人们真正享受到现代计算机技术应用于企业物流管理的益处。
本文主要针对自动化立体仓库的必备设备——巷道堆垛机的自动取货控制系统进行定位设计。
首先选择堆垛机的驱动电机,然后针对系统需要选择调节速度的变频器,接着确定堆垛机的寻址方式再选用PLC,最后是控制电路的设计,包括堆垛机步序确定、绘制梯形图及步序指令编写。
关键字:堆垛机认址变频 PLC目录第一章巷道式堆垛机概述------------------------------------------------- 41.1 巷道式堆垛机---------------------------------------------------- 41.2 堆垛机系统分析-------------------------------------------------- 4 第二章驱动电机的选择--------------------------------------------------- 52.1 堆垛机电机特点-------------------------------------------------- 52.2 堆垛机水平运行机构电机选择-------------------------------------- 62.3 起升机构电机选择------------------------------------------------ 62.4 货叉驱动电机的选择---------------------------------------------- 7 第三章变频器的选择------------------------------------------------------ 83.1 变频器简介------------------------------------------------------ 83.2 水平运行机构变频器的选择--------------------------------------- 103.3 提升机构变频器的选择------------------------------------------- 10 第四章认址方式的选择--------------------------------------------------- 114.1 光电传感器原理------------------------------------------------- 114.2认址方式选择---------------------------------------------------- 12 第五章输入输出及元器件确定-------------------------------------------- 155.1输入输出点确定-------------------------------------------------- 155.2元器件选择------------------------------------------------------ 16 第六章 PLC的选用------------------------------------------------------ 176.1 PLC的选用------------------------------------------------------ 176.2 PLC的I/O点分配------------------------------------------------ 18 第七章堆垛机取货PLC控制---------------------------------------------- 197.1堆垛机出库动作顺序---------------------------------------------- 197.2堆垛机运行分析-------------------------------------------------- 197.3 PLC接线-------------------------------------------------------- 217.4 PLC控制的实现-------------------------------------------------- 22 总结------------------------------------------------------------------- 28 参考文献--------------------------------------------------------------- 28第一章巷道式堆垛机概述1.1 巷道式堆垛机1.1.1巷道式堆垛机简述巷道式堆垛机是现代自动化立体仓库的主要设备之一,主要用来进行出、入库作业。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
堆垛机使用说明
堆垛机的手动操作
1、将堆垛机控制柜内的“手动/自动”开关打到手动档(图示位置,PLC输入点I0.1亮)
2、在操作过程中面对堆垛机控制柜,点动一下“向上”按钮,堆垛机即会向上移动一个位置;点动一下“向下”按钮,堆垛机即会向下移动一个位置;点动一下“前”按钮,堆垛机即会向前方移动一个位置;点动一下“向后”按钮,堆垛机即会向后方移动一个位置;点动一下“向右”按钮,叉板即会向右边的货架方向(B区)移动一个位置;点动一下“向左”按钮,叉板即会向左边的货架方向(A区)移动一个位置。
当到达某个位置时堆垛机会自动停下。
在叉板伸出后点动“向前”“向后”按钮将不会有任何反应,此时需点动“向左”或“向右”按钮使叉板回到中间位置。
这样就起到了一个保护的作用。
本系统堆垛机类似:前为叉板方向,反向为后。
上就是上,下就是下。
左叉是站在后的位置,此时左边就是左叉,右边就是右叉。
堆垛机的叉板能停在其所在层货架仓位平齐位置下方一点或上方一点。
手动控制堆垛机取货时先停在其所在层货架仓位平齐位置下方一点,然后将叉板伸入货仓,提升至货架仓位平齐位置上方一点,最后把叉板缩回将货物取出。
手动控制堆垛机放货时停在其所在层货架仓位平齐位置上方一点,然后将叉板伸入货仓,下降至货架仓位平齐位置下方一点,将货物放入,最后把叉板缩回。
注意:将手/自动开关拨到自动档前,必须点动“左”或“右”按钮使叉伸回到中间位置,层的位置为某一层的下方。
3堆垛机位置的确定
货仓从左至右依次是1-12列,0列为入货台那列,结尾列为出货台那一列。
从下至上1-5层。
前排以A1为命名,共60个货位。
后排以B1为命名,也有60个货位。
立体货仓的仓位地址使用字符串表示:前两位表示仓位所在行(本实验室有两行,定义为A1和B1);中间两位是堆垛机的所在列;后两位是堆垛机的所在层。
如:“A10101”,表示堆垛机的当前所在位置为外面一行第1列第1层。
如:“B10405”,表示堆垛机的当前所在位置为靠墙一行第4列第5层。
二、堆垛机、输送链的自动控制
1、将堆垛机和输送链控制柜内的“手动/自动”开关均打到自动档(图示位置,
PLC 输入点I0.1暗)。
保证堆垛机的叉伸在中间位置,对应层的位置为某一层的下方。
2、运行“立库对接LED-COM5和立库对接LED-COM6”程序
弹出如下两个画面
缩小化。
3、“堆垛机运行系统”程序和单片机通讯程序。
双击桌面的“条码”图标和“单片机通讯”图标,进入VB运行系统。
弹出如下两个画面
4、双击桌面的“启动立库系统”按钮,弹出如下画面。
点击左键进入数据刷新界面。
按确认进入程序主界面。
主界面
若出现下图所示当前信息全为??的情况,说明主控机与PLC通讯失败,请检
查PLC控制柜电源是否打开,它与电脑的通讯接口是否出现松动。
一切正常核对完之后,如下所示:
相应的信息栏有信息显示。
(1)入库作业
[设置入库单]
新建入库申请。
输入入库货物条码:
选择入库仓位,点击“确定”按钮确定:
所有入库请求添加完毕,点击“生成入库单”按钮
返回主界面。
点击导入入库作业
一般情况下是最后一条指令,导入并运行。
入口条码器读到条码的时候,堆垛机会自动运行。
把货物送到指定的仓位里面去。
作业类型:入库;
出库;
移库;
对调;
状态: 0——未执行;
1——正在执行;
2——任务完成。
手动依次将需要入货的物流盒放到滚筒输送链上,有条码的一面朝向条码阅读器。
盒子的间距保持在0.1-0.5米之间。
(2)出库作业
[设置出库单]
首先点击设置出库按钮:
弹出以下界面。
点添加出库请求
根据出库仓位里面有的仓位,选择对应的分拣口。
点击确认。
生成出库单。
点击确认,就可以返回主界面。
点击导入出库作业
一般情况也是最后一条,选中,导入数据并运行。
(3)调库作业
[设置调库单]
首先点击设置调库按钮:
弹出以下界面.
点添加调库请求
根据所对应仓库地址进行对调或移库。
生成出库单。
点击确认,就可以返回主界面。
点击导入调库作业
一般情况也是最后一条,选中,导入数据并运行。
注意:不能随意修改,只能在堆垛机出现故障后去修改。
界面中,左边可以动画显示仓库内的货物状态(有货物则显示图标,无货物则无图标),右边表格中也显示当前仓库内的货物状态,
如果要修改某个非空仓位内货物的商品信息,则先鼠标单击该仓位,选择“修改”,输入货物数量,替换货物条码,最后点击“确定”即可;如果要删除某个非空仓位内的货物,则先鼠标单击该仓位,然后点击“清空该仓位”,此时界面上对应的那个仓位中的货物图标就会消失。
(4)复位
在界面的右下角还有个复位按钮,是“堆垛机复位”。
当系统出现故障时,它是快速恢复到正常状态的有效方法。
堆垛机复位:
将堆垛机移至出货台。
当堆垛机不在它的标准位置时,点击此按钮可快速使堆垛机回到标准位置,并与主控机中的当前层、当前列保持一致。
点击“堆垛机复位”按钮时必须保证堆垛机的叉伸没有伸出,如果此时叉伸不在中心位置,请将堆垛机切换至手动状态,然后由按钮开关将叉伸缩回中心位置,然后再按“堆垛机复位”。