浅谈自升式海洋钻井平台齿轮条爬升与锁紧系统设计
自升式海洋平台齿轮齿条升降装置有限元分析

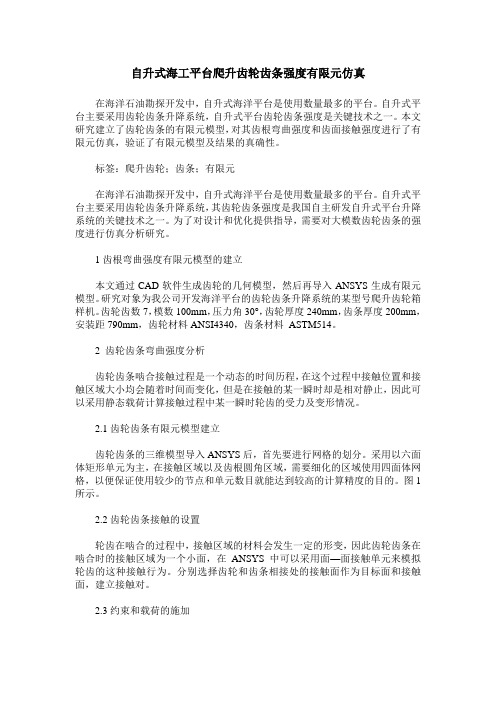
附件接 触 ,此 区域 是最容 易发 生点蚀 。因此主要针 对 05 . s时刻 单 齿啮合 时齿轮 齿 条进 行强 度分 析 。图 8为齿轮 齿条接 触部位 应 力分布 云 图。如 图 8a和 图 8b所 示 ,小 齿轮 与 齿条接 触 区域呈 带状 分布 , () () 沿 小齿 轮 中截面应 力 分布前 后对称 ,最 大接触 应力 分布 于 小齿轮 上 ,小齿 轮与 齿 条接触 边缘 区域 应力 较 大 ,且应 变较大 。
沿 小齿轮 厚度 方 向的应 力变化 曲线 。小齿轮 沿厚度 方 向最大 应 力为 10MP 4O a左右 ,主 要集 中在 小齿 轮 与齿条 接触 的两边 边缘 部位 ,其 余接 触部位 应力 为 10MP 20 a左右 ,分布 比较 均匀 。齿条沿 齿 厚方
向最 大应 为为 1 5 MP 2 0 a左 右 ,主要 集 中与齿 条两 侧边 缘部 位 ;最 小应 力 为 9 0 a左右 ,最 大应 力 0 MP
。
MI se;
S Mi e¥ s
(u : 5 ) A g 7%
(v : 5 A g 7 %)
. .
广 T +10 e+03 .6 7
一
.2o 12i .+ 4 e
2
.
.
.
+2 8+ ,0 3l 0 e
t+ 80 21 .+ 3 e
()齿轮接触部位 a
.
,
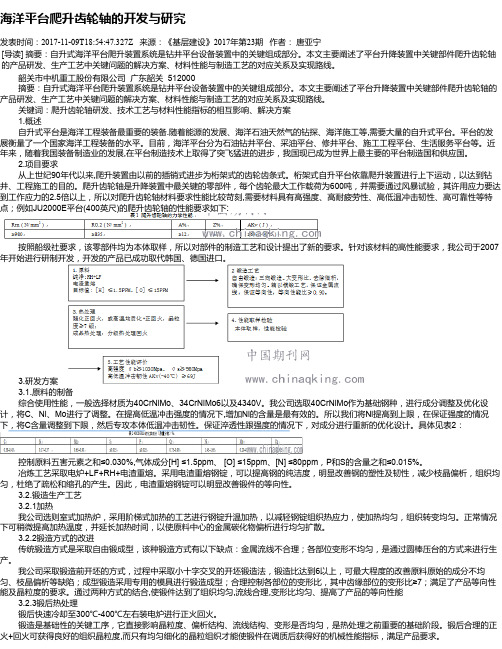
7为齿轮 齿条接 触 区域 最 大接触 应 力随 时间变化 的历 程 曲线 。由图 7可 以看 出 , . s 右 由双齿 啮合 03 左 5 区逐渐过 渡 到单齿 啮合 区,双 齿 啮合 区最大接 触应 力变 化 范 围为 80 9 0 a 0 ~ 0MP ,单齿 啮合 区最 大接触
自升式海洋钻井平台浅谈

自升式海洋钻井平台浅谈自升式平台顾名思义是具备自升能力的功能性平台,通过一定长度可以自行升降的桩腿来实现操作高度的变化以适应不同作业水深的要求,有槽口式和悬臂梁式的,现今新建平台基本都是悬臂梁式,一些平台配置有DP(dynamic position)系统从而实现自航和自定位功能,本文仅对不带有DP系统的自升式具备钻井操作能力的平台布置的简析。
自升式平台目前主要有两种形式,独立桩腿式和沉垫式,作业水深范围从12/14 英尺直至550 英尺。
大多数自升式钻井平台的作业水深在250至300 英尺范围内,较浅水深则由一些固定式平台覆盖,比如模块钻机等。
目前主流自升式平台多采用独立桩腿式,主要船型有新加坡吉宝船厂的Keppel Fels B Class , 美国F&G 公司的Super M2 以及JU2000/JU2000E ,荷兰MSC公司的Gusto CJ系列(CJ46/CJ50/CJ70,设计作业水深不同),美国Letourneau公司的Letourneau 116 系列等.各类型平台各具特色,根据不同的可变载荷(后面会提到其影响)和设备功能配置会有不同的租金差别,但其主要差别目前仍是从作业水深来大致区分,从各自平台造价来说,设备配置占据整个平台的较大部分,再加之一些设计费用和专利费,各类型平台取决于客户的想法和习惯以及使用区域的实际情况等因素。
自升式平台目前主要入级的船级社有ABS(美国船级社),DNV(挪威船级社,目前改为DNV—GL,同德国劳氏合并后简称),CCS(中国船级社)以及较少的BV (法国船级社),目前最主要的是ABS和DNV,原因是其关于钻井平台的要求较为详细完整,并且出台的相应的专门入级的规范,如MODU等,其网站提供相关规范的免费下载,同时每年会有相应的更新,在进行平台设计时应注意该平台入级的是哪一年的规范,同时按照对应规范进行相关设计,有些更改会对相关系统和设备由额外的要求,将会直接的提高建造成本。
海洋平台结构作业——自升式海洋平台升降结构

常见自升式海洋平台升降结构对比分析班级:学号:姓名:目录一、自升式平台简介 (3)二、现有常见升降结构 (4)1、圆柱型桩腿一单环梁液压升降装置 (4)2、方壳型桩腿—双环梁液压升降装置 (6)3、桁架型桩腿一齿轮齿条升降装置 (7)三、升降系统的对比 (8)1、桩腿结构形式对比 (8)2、触底形式对比 (9)3、升降装置对比 (10)4、动力源对比 (11)一、自升式平台简介自升式平台是一种海上活动式钻井装备,目前是我国海洋石油勘探中使用最多的一种钻井平台,由于其作业稳定性好和定位能力强,在大陆架海域的油气勘探开发中居极其重要的地位。
自升式平台主要由平台主体、桩腿、升降锁紧装置、钻井装置(包括动力设备和起重设备)以及生活楼(包括直升飞机平台)等组成。
平台在工作时用升降装置将平台主体提升到海面以上,使之免受海浪冲击,依靠桩腿的支撑稳定的站立在海底进行钻井作业。
完成任务后,降下平台主体到海面,拔起桩腿并将其升至拖航位置,即可拖航到下一个井位作业。
因此,支撑升降系统的结构对自升式海洋工作平台的安全有着至关重要的作用。
自升式平台的工作状态如图一所示。
图一二、现有常见升降结构支撑升降系统作为自升式平台中的核心部分,在平台的设计建造中历来受到高度重视,其性能的优劣直接影响到平台的安全和使用效果。
最常用的升降装置是齿轮齿条式和顶升液压缸式。
具体可见下表壳体桩腿是封闭型桩腿,其桩腿截面有圆形和方形两种形式;桁架式桩腿截面有三角形和四方形两种形式。
不同截面形状的桁架式和壳体式桩腿与不同类型的升降驱动方案相互组合,衍生出多种能够实现升降平台功能的支撑升降系统类型。
1、圆柱型桩腿一单环梁液压升降装置销子、销孔和项升液压缸是一种升降装置。
系统原理图如图二。
图二每一桩腿有两组液压动作的插销和一组顶升液压缸。
当装在环梁上的一组环梁销插入到桩腿的销孔中时,一组顶升液压缸的同步动作即可使环梁及销子带动桩腿(或平台主体)升降一个节距,然后进行换手:将锁紧销推入到桩腿的销孔中,退出环梁销,液压缸和环梁复位,下一个工作循环开始。
自升式钻井平台升降控制系统设计与优化研究
自升式钻井平台升降控制系统设计与优化研究
张曙光
【期刊名称】《科学技术创新》
【年(卷),期】2024()10
【摘要】本文探究了自升式钻井平台升降控制系统的设计方法,并对钻井平台的水平控制和桩腿电机的同步控制进行了优化分析。
该系统由动力传动、升降控制和传感器三个模块构成,采用DCS分布式结构,以中央工控机作为上位机,PLC控制箱作为下位机。
前端传感器采集载荷、速度、水平度等信号后,上传至工控机并完成分析处理,然后生成相应的调控指令并发送给下位机。
利用下位机控制桩腿上的电机完成升降操作,保证了钻井平台的水平与稳定。
在钻井平台上布置水平仪,将水平方向上的位移偏差转化为速度偏差,对桩腿进行独立调控,达到水平控制优化的目的;对桩腿电机使用耦合控制模式,保证了电机在和均衡、同步运行,达到了同步控制优化的目的。
【总页数】4页(P36-39)
【作者】张曙光
【作者单位】中国石油大学(华东)信息与控制工程学院;中海油田服务股份有限公司一体化和新能源事业部
【正文语种】中文
【中图分类】U674.38
【相关文献】
1.自升式海洋钻井平台升降装置同步控制
2.深水自升式钻井平台升降控制系统设计
3.简述自升式钻井平台升降装置控制系统设计
4.自升式海洋钻井平台升降系统多电动机同步控制研究
因版权原因,仅展示原文概要,查看原文内容请购买。
自升式钻井平台悬臂梁齿轮齿条驱动系统设计
s t r u c t u r e a n d t h e c e n t r e o f g r a v i t y o f t h e i n s t a l l a t i o n we i g h t o n t h e c a n t i l e v e r .T h e g e o me t r i c p a r a me t e r s o f t h e g e a r r a c k o f t h e c a n t i l e v e r b e a m s h o u l d b e c a l c u l a t e d wh e n d e s i g n i n g t h e l i n k a g e s t uc r t u r e b e t w e e n t h e c a n t i l e v e r b e a m a n d t h e g e a r r a c k a n d
Ke y Wo r d s :S e l f - e l e v a i t n g Dr i l l i n g P l a t f o r m Ca n il t e v e r Be a m Ge a r Ra c k S t r u c t u r a l De s i g n Dr i v e Co n t r o l
自升 式 钻 井 平 台 悬 臂 梁 齿 轮 齿 条 驱 动 系 统 设 计 术
口 王龙庭 口 徐兴平 口 徐长航 口 刘广斗
2 6 6 5 8 0
口
张
辛
中 国石 油 大 学 ( 华东 ) 机 电工 程 学 院 山东 青 岛
摘 要 : 以 某 自升 式 钻 井 平 台 为例 , 采用“ 电机+ 变速 箱+ 小传 动 轮 + 齿务” 方 式 驱 动 悬 臂 梁 移 动 。 通 过 悬 臂 梁 的 结 构 及 悬臂 梁上 的 设 备 质 心 确 定移 动 悬臂 梁所 需 的推 力 。 计 算 悬臂 梁齿 轮 齿 条 几 何 参 数 。 并设 计 悬臂 梁 与 齿 轮 齿 条 的 连 接 结 构
自升式海上钻井平台升降系统技术特点分析

压 马达, 可使 升降 系统 针对 不 同 的载荷 采用 不 同 的 速度 ,这 样 节 省 了平 台 升降 的时 间 ;③采 用 大 扭
矩 、低转 速 的液 压马达 可减小 减速箱 的传动 比,从
而减小其 尺寸和 造价 。 从 操 作方式及 故障 率来看 ,两种驱 动升降方 式
均 需设置集 中控 制 台和 桩边 控制 台,集 中控制 台 内
2 齿 轮齿 条 升 降系统 的设 备 组 成
自升式平 台的桩腿齿 条是 沿桩腿 圆筒 或玄杆铺升 降系统传
动装 置 的末端 ,整 个升 降系统 的动力 由电动机或液
压马 达输 出 ,通过联 轴器传 输到传 动装置 ,再 由传 动装置 传递给 小齿轮 ,最后通 过小齿 轮驱动齿 条作
翔
T ur … o n
(7 t 0) 1
c
一 条棠 茎
B 8 00 0N・ 以上 。 目前 国 内缺 乏这 种 大速 比减 速 0 0 m
机 构 的设 计制 造 经验 ,对 于其受 力 分析 、动 力学研 究 、振 动噪声 控 制 、弹性 啮合 原理 以及 载荷 分配 等
每座平 台典型 的 电动齿 轮齿条 式升 降系统 的主
齿 轮齿条 升降 的方 式 比较 多 。所 谓齿轮 齿条式 升降
系统就是 在平 台的每根齿 条上设 置几个小 齿轮 ,齿 条及 其对应 小齿轮 数量根 据平 台所 要求 的举升能 力
和平 台总体要 求加 以确定 。动力通 过桩边 马达驱动
直 线运 动 ,从 而带动桩 腿或平 台进行 升降作业 。对
l 圈 梁 ; 2 平 台 主 甲板 ; 3 顶 升 油 缸 ;4 升 降 室 顶 饭 ; 一 — 一 -
于一个 三根绗 架式桩腿 的 自升 式平 台来说 ,每一个 桩 腿 上都有 三 根玄杆 ,每根 玄杆 上 设有 两道 齿 条 , 每 道齿 条上有 上下 两个小 齿轮 与之 啮合 ( 图 3 , 见 ) 每一 对 啮合 齿轮及 其驱 动 、传 动装置构 成一个升 降 单元 ,一般 来讲 ,升降 系统 由数 个或数 十个升 降单
图解自升式钻井平台升降系统
图解自升式钻井平台升降系统————————————————————————————————作者:————————————————————————————————日期:图解自升式钻井平台升降系统(原创)海洋石油平台分类:采油模块自升式钻井平台半潜式钻井式平台储油船(FPSO)集储油和动力供给平台目前,我从事的工作是以自升式钻井平台建造工程,以平台电气系统设备调试为主要工作,下面介绍自升式钻井平台的概况及重要系统:升降系统。
我曾经参与制造的自升式钻井平台有:JU2000E系列:1~6号;中油海L780—1、L780-2;中海油937(CJ46);中油海胜利十号。
自升式钻井平台组成:主船体:主甲板面主要承载起重设备;钻井作业配套设备;通风设备;锚机设备;救生筏及悬臂梁液压滑移设备等;机舱机械甲板主要承载主发电、供电系统;暖通空调设备;海水、淡水设备;泥浆、钻井辅助设备;消防系统等;生活区:应急发电、应急供电系统;钻井办公、休息区;餐饮服务间;无线电通讯室;升降控制台;中央DCS系统控制室;救生艇;飞行甲板区;钻井作业区(悬臂梁及钻台):井架设备;钻台设备;防喷器设备;高压泥浆管线设备悬臂梁设备等;升降系统组成:一升降控制台:CENTRAL CONTROL CONSOLE二升降MCC:JACKING MCC三桩腿单元:LEG UNIT升降马达:JACKING MOTOR桩腿单元:桩腿单元是升降系统的重要组成部分,大部分钻井平台有三条桩腿,它起到将船体支撑在水面上,以便于进行水上钻井作业,同时,根据不同地域水深情况调整适合平台作业的水深高度,使悬臂梁移出达到钻井工位进行钻井工作.平台的桩腿位于平台主船体的承重端点位置上,一般有三个桩腿,呈花架结构;它的升降移动是靠齿轮齿条传动,齿条间距:319。
186mm;升降移动速度:0.45m/min;由升降电机带动齿轮变速箱输出动力给转动小齿轮,小齿轮与焊接在装腿上的齿条咬合达到传动效果,每个桩腿有三个玄管,每个玄管基础支架上有4~6个升降电机,使升降输出动力可靠;升降电机的组成与排列下图背面排列有三组六个电机。
自升式钻井平台锁紧机构设计与力学行为分析

㊀ ㊀ ㊀ ㊀ ㊀ ㊀
CHINA PETROLEUM MACHINERY
石㊀ 油㊀ 机㊀ 械
2015 年㊀ 第 43 卷㊀ 第 11 期
Hale Waihona Puke ㊀ ㊀◀海洋石油装备▶
自升式钻井平台锁紧机构设计与力学行为分析
( 西安石油大学机械工程学院)
周㊀ 欣
㊀ ㊀ 摘要: 自升式钻井平台广泛采用蜗轮蜗杆驱动的齿形楔块锁紧系统, 国内外对钻井平台齿轮 齿条升降系统稳定性研究较多, 但对其锁紧后齿条的应力应变研究相对较少㊂ 为满足钻井平台齿 形楔块式锁紧系统锁紧方案要求, 设计出一种异形蜗轮蜗杆锁紧单元㊂ 在锁紧状态下对锁紧系统 进行力学分析, 得出平台转移载荷, 并运用 ANSYS 对齿面接触做有限元分析, 结果与变形协调方 程所求应变趋势基本一致, 与实际情况相符, 同时证明锁紧齿条块变形量呈指数增长㊂ 利用 Pro / 击载荷小㊂ 研究结果可为齿形楔块式锁紧系统设计提供参考依据㊂ 关键词: 自升式钻井平台; 蜗轮蜗杆驱动; 锁紧机构; 齿条; 齿面接触; 力学分析 中图分类号: TE951㊀ 文献标识码: A㊀ doi: 10������ 16082 / j������ cnki������ issn������ 1001 - 4578������ 2015������ 11������ 017 E 对锁紧系统建模, 导入 ADAMS 对锁紧系统进行运动分析, 结果表明其传动平稳, 同步性好, 冲
Zhou Xin
locking system������ The studies on the drilling platform gear and rack lifting system have been focused on the stability, but seldom on the stress and strain of the rack during locking������ To meet the locking program requirements for the drilling platform tooth⁃shape wedge⁃type locking system, a special worm and worm wheel lock unit is designed������ The platform transfer load is determined though mechanical analysis on the locking system in the locked state������ Finite ele⁃ locking tooth bar deformation amount increases exponentially������ The locking system is modeled with Pro / E and ana⁃ lyzed by means of ADAMS������ The simulation results show that the system has smooth transmission, good synchroniza⁃ tion and low impact load������ tact; mechanical analysis Key words: jackup drilling platform; worm and worm wheel drive; locking mechanism; rack; tooth con⁃ ADMAS 的仿真分析得到的齿轮齿条传动机构动力 学特性具有有效性 [2] , X������ M������ Tan 等 [3] 利用数值分 析法研究了结构动力学, 但对于钻井平台锁紧系统 91������ 4 m (300 ft) 自升式钻井平台锁紧系统, 对自 升式钻井平台锁紧单元进行了设计, 对锁紧系统进 供方法和依据㊂ 行了力学分析, 以期为齿形楔块式锁紧系统设计提 的力学 行 为 分 析 相 对 较 少㊂ 鉴 于 此, 笔 者 结 合 ment analysis on the tooth surface contact is conducted using ANSYS������ The results are consistent with the strain trend calculated by deformation compatibility equation, and are also in line with the actual situation, conforming that the
海上自升式修井作业平台的设计探讨
4 桩腿长度及升船高度的设计
电动齿 轮 条式升 降装 置 的主要 原理 是利 用 电能带 动齿 轮 4 . 1 桩 腿长 度的设 计 的 转动 , 使 齿轮 与平 台的桩 腿 的齿 条互相 咬合 , 从 而 实现桩 腿 桩腿 的长度设 计是海上 自升式 修井作业 平 台设 计的关 键 , 的 升降 , 这 种方 式升 降效率 高并 且具 有持 续性 的特 点 , 但是 其 其桩腿 的长度关 系到平 台能否升至 海面进 行正常作 业 , 桩腿长 依 赖于 复杂 的变速 机构 , 体 积较 大 , 对 各种材 料 的要 求 比较 严 度设计公式如 下 : L=h l+^ 2+ 3+ 4+矗 5+ 6+ 7 格, 一般用 于深 水 自升式平 台。 在 以上 桩 腿长 度 设计 公 式 中 , 三代 表所 要 设 计 的桩 腿长 2自升式平台的构成和型式选择 度。 2 . 1自升式平台结构的构成 l 代表 桩腿 入土深 度 , 桩腿 入土 深度 与海底 土壤 状况 、 载 自升式 平 台的 结构 构成 主要有 : ①桩 腿 : 桩 腿的 主要 作用 荷、 桩 腿大 小 、 整个 自升 式平 台的 结构 型式有 关 ; 2代 表最大 就 是完 成平 台整体 的升 降 , 使 之能 够上升 到海 面上 , 实现 海上 工 作水深 ; 3 代 表水 面 以上波 峰高 度 ; 4代表 平 台底 部到 波 修 井作 业 ; ② 平台 : 平 台 主要提 供工 作人 员修井 作业 的工 作场 峰 的高 度 ; 5代表平 台型深 ; ^ 6代表 固桩架 的 高度 ; 7为 余 地 和 日常生 活场地 , 并且 在迁 航的 过程 中提供 稳定 的浮 力 , 保 量, 根 据桩 腿结 构以 及桩节 距确 定的 富余 高 度。 由此 可 见 , 以 证 迂航 的顺利 ; ③ 固桩 结构 : 顾名 思义 , 固桩结 构就是 将桩腿 与 桩腿 的长 度要综合 多方 面因素进行考虑 。 平 台 牢牢 的固定 在一起 , 形成 一个 整体 , 这样平 台所 承受 的载 4 . 2升台高度的设计 荷 就 能通 过 桩腿 传 达到 海 底地 基 上 , 固桩 结构 主要 包 括 固桩 在进 行海上 修井 作业 时 , 要 保证 作业 正常 , 平 台应 上升 一 块、 固桩架等设备u 。 定 高度 , 这 个高 度成 为升 台高 度 , 升 台高度 应 充分考 虑作 业海 2 . 2平台结构 型 式的 选择 域、 季节 以及海 面状 况等 自然 因素 , 还 应考 虑波 峰以 及波 峰距 平 台型式的选 择主要 有以下 几个依据 : ①根 据 工作水深进 平 台底部的高 度。 行选择 : 如若 工作水 深较深 , 应选 择桁架 式桩腿 , 如若 水深较 浅
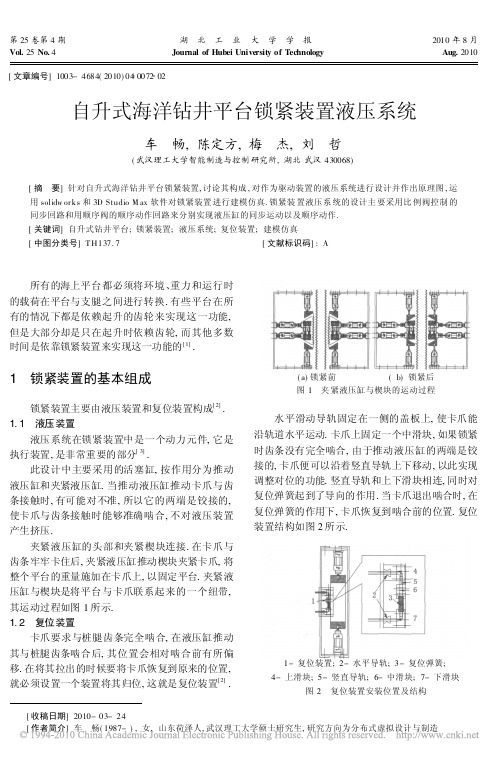
自升式海洋钻井平台锁紧装置液压系统
第25卷第4期湖 北 工 业 大 学 学 报2010年8月Vol.25No.4 Journal of Hubei University of Technology Aug.2010[收稿日期]2010-03-24[作者简介]车 畅(1987-),女,山东荷泽人,武汉理工大学硕士研究生,研究方向为分布式虚拟设计与制造[文章编号]1003-4684(2010)04 0072 02自升式海洋钻井平台锁紧装置液压系统车 畅,陈定方,梅 杰,刘 哲(武汉理工大学智能制造与控制研究所,湖北武汉430068)[摘 要]针对自升式海洋钻井平台锁紧装置,讨论其构成,对作为驱动装置的液压系统进行设计并作出原理图,运用solidw or ks 和3D Studio M ax 软件对锁紧装置进行建模仿真.锁紧装置液压系统的设计主要采用比例阀控制的同步回路和用顺序阀的顺序动作回路来分别实现液压缸的同步运动以及顺序动作.[关键词]自升式钻井平台;锁紧装置;液压系统;复位装置;建模仿真[中图分类号]T H137.7[文献标识码]:A所有的海上平台都必须将环境、重力和运行时的载荷在平台与支腿之间进行转换.有些平台在所有的情况下都是依赖起升的齿轮来实现这一功能,但是大部分却是只在起升时依赖齿轮,而其他多数时间是依靠锁紧装置来实现这一功能的[1].1 锁紧装置的基本组成锁紧装置主要由液压装置和复位装置构成[2].1.1 液压装置液压系统在锁紧装置中是一个动力元件,它是执行装置,是非常重要的部分[3].此设计中主要采用的活塞缸,按作用分为推动液压缸和夹紧液压缸.当推动液压缸推动卡爪与齿条接触时,有可能对不准,所以它的两端是铰接的,使卡爪与齿条接触时能够准确啮合,不对液压装置产生挤压.夹紧液压缸的头部和夹紧楔块连接.在卡爪与齿条牢牢卡住后,夹紧液压缸推动楔块夹紧卡爪,将整个平台的重量施加在卡爪上,以固定平台.夹紧液压缸与楔块是将平台与卡爪联系起来的一个纽带,其运动过程如图1所示.1.2 复位装置卡爪要求与桩腿齿条完全啮合,在液压缸推动其与桩腿齿条啮合后,其位置会相对啮合前有所偏移.在将其拉出的时候要将卡爪恢复到原来的位置,就必须设置一个装置将其归位,这就是复位装置[2].(a)锁紧前 (b)锁紧后图1 夹紧液压缸与楔块的运动过程水平滑动导轨固定在一侧的盖板上,使卡爪能沿轨道水平运动.卡爪上固定一个中滑块,如果锁紧时齿条没有完全啮合,由于推动液压缸的两端是铰接的,卡爪便可以沿着竖直导轨上下移动,以此实现调整对位的功能.竖直导轨和上下滑块相连,同时对复位弹簧起到了导向的作用.当卡爪退出啮合时,在复位弹簧的作用下,卡爪恢复到啮合前的位置.复位装置结构如图2所示.1-复位装置;2-水平导轨;3-复位弹簧;4-上滑块;5-竖直导轨;6-中滑块;7-下滑块图2 复位装置安装位置及结构2 液压系统的设计此海洋钻井平台每桩升降的锁紧装置有3组液压系统,每组液压系统有2个动作 推动液压缸组成的推动动作和夹紧液压缸组成的夹紧动作.每个动作有4个液压缸,所以8个液压缸服务一组系统.由于机构的运动要保持稳定,使每个卡齿平均受力,降低不必要的危险,必须在工作时让这12个推动液压缸一起运动;然后再让12个夹紧液压缸一起运动.本设计只考虑一组液压系统.综合以上的各个液压系统回路,基本确定本次设计的液压原理图如图3所示.图3 液压系统原理图3中,液压油经吸油过滤器、液压泵、高压过滤器、单向阀进入电磁换向阀10,此时DT 1得电,液压油进入电磁换向阀16.1和比例方向阀17.1、17.2、17.3,DT 3、DT5、DT 7、DT 9得电,4个推动液压缸开始同步运动,完成推动动作,其中节流阀节流调速,保证运动的平稳性;随着推动液压缸推动卡爪与齿条啮合,系统的压力会不断增大,当增大到顺序阀11.1的调定压力时,阀门打开,液压油进入电磁换向阀16.2和比例方向阀17.4、17.5、17.6,DT11、DT13、DT 15、DT17得电,4个夹紧液压缸开始同步运动,推动楔块夹紧,蓄能器和液压锁实现保压,平衡阀19.1、19.3保证因为重力原因造成的运动不平稳;当夹紧动作完成后,液压缸要退回来时,DT2得电,DT 12、DT 14、DT16、DT18也得电,4个夹紧液压缸完成同步退回动作,平衡阀19.2、19.4保证因为重力原因造成的运动不平稳;当运动到终点时,液压油会退回来,系统压力会升高到顺序阀11.2的调定压力,阀门打开,DT4、DT 6、DT8、DT 10得电,4个推动液压缸完成同步退回动作,单向节流阀在出油口节流调速,保证运动的平稳性.其中小型直动式溢流阀的缓冲回路是为了保证系统工作的安全性,比例方向阀的同步回路是为了保证液压缸的同步运动[4].3 锁紧装置的建模仿真为了更形象地描述液压缸的运动,也为了试验所设计的锁紧装置是否合理,本文采用Solidw or ks 软件和3D Studio M ax 软件对锁紧装置的运动进行仿真.3.1 锁紧装置零件的建模在Solidw orks2007的软件环境下建立模型的基本步骤如下:1)根据查阅资料估计各个零件的尺寸,按新建 零件 草绘 拉伸(剪切) 旋转 选择新平面 草绘 成型;2)将设计出的零件按相关约束进行装配至装配体形成.3.2 锁紧装置的动画仿真由于锁紧装置的某些运动在Solidw or ks2007软件的环境下无法实现,因此在本设计中采用3D Studio M ax 软件来实现这一运动.在本设计中锁紧装置的运动主要包括4个过程:1)推动液压缸推动卡爪与齿条啮合;2)夹紧液压缸推动楔块与卡爪夹紧;3)夹紧液压缸推动楔块与卡爪分离;4)推动液压缸推动卡爪与齿条分离,即回到原始位置(图4显示的是锁紧装置锁紧的时刻).图4 锁紧装置锁紧4 结束语锁紧装置系统本身的设计不是十分复杂,但是在恶劣的环境、频繁的工作状态下,与海洋钻井平台安全性、稳定性、高效性密切相关.本文设计的锁紧装置在结构上简化了平台,不仅更安全而且节约经济成本,仿真完善了设计的不足,达到了预期目的.(下转第107页)73第25卷第4期 车 畅等 自升式海洋钻井平台锁紧装置液压系统[ 参 考 文 献 ][1] 郭彦峰,许文才,王 梅.蜂窝纸板缓冲性能的实验研究[J].包装工程,1999,20(2):12-15.[2] Gibson L J.A shby M.F Cellular solids:str ucture andP ropert ies [M ].Cambridge:Cambridge U niversity P ress,1997.[3] 王冬梅,王志伟.纸质结构型包装材料缓冲性能研究进展[J].材料导报,2007,21(6):43-46.[4] 李厚民,朱若燕,杨小俊.蜂窝纸板与瓦楞纸板组合结构缓冲特性研究[J].包装工程,2005,26(4):9-11.[5] 张安宁,童小燕,刘效云,等.多层叠加蜂窝纸板压缩特性研究[J].包装工程,2004,25(6):31-32.[6] GB/T 8168-2008.包装用缓冲材料静态压缩试验方法[S].国家标准局.Study of the Performance of Combinatorial HoneycombPaperboards Through the Static CompressionZH U Ruo y an,YIN Qi,LI H ou min(S chool of M echanical Engin.,H ubei Univ .of T echnology ,w uhan 430068,China)Abstract:Thro ug h the static compression test of com bination honeycom b paperbo ar d,this paper studies the curve and the cushio ning properties of com binations of honey com b paperboards w ith different ar eas.The pro cess of static compressio n of co mbinatio n of honeycom b paperbo ar ds is described and the results in dicate that the com bined structure can impr ove the cushioning pr operty of honey com b paperboards.In ad dition,the com parativ e analysis has been m ade in different areas and the influences fro m different areas are obtained.T hese results w ill be helpful in the composite packing design.Keywords:ho neycomb paperboard;static com pression;cushio ning pro perty[责任编校:张培炼](上接第73页)[ 参 考 文 献 ][1] 李克向.钻井手册(甲方)[M ].北京:石油工业出版社,1990.[2] 佚名.美国钻井手册[M ].陈理中译.北京:石油工业出版社,1980.[3] 李壮云.液压元件与系统[M ].北京:机械工业出版社,2005.[4] 明仁雄,万会雄.液压与气压传动[M ].北京:国防工业出版社,2003.The Locking Device of Jack up Offshore Drilling Platform 'sHydraulic System Design and SimulationCH E Chang,CH EN Ding fang,M EI Jie,LIU Zhe(Research I nst.of I ntelligent M anuf .and Control ,Wuhan Univ ,of T ech.,Wuhan 430063,China)Abstract:T his paper researches on the issue of the locking device of Jack up offshore drilling platform,discussing its constitution,talking abo ut the desig ning o f the hydraulic sy stem and draw ing hy draulic sys tem schem atics.U sing So lidw orks and 3D Studio Max so ftw are are used to model and simulate the lo cking device.The design of Lo cking Device's hy draulic system mainly uses proportional valve to co ntro l the syn chronization loop and the or der w ith the or der of v alv e actio n circuits to achieve synchronous mov em ent of hy draulic cy linder as w ell as the order of actio n.Keywords:jack up drilling platfo rm;the lo cking device;hydraulic system;reset dev ice;modeling and sim ulatio n[责任编校:张 众]107第25卷第4期 朱若燕等 组合蜂窝纸板缓冲性能的静态试验研究。
自升式海工平台爬升齿轮齿条强度有限元仿真
自升式海工平台爬升齿轮齿条强度有限元仿真在海洋石油勘探开发中,自升式海洋平台是使用数量最多的平台。
自升式平台主要采用齿轮齿条升降系统,自升式平台齿轮齿条强度是关键技术之一。
本文研究建立了齿轮齿条的有限元模型,对其齿根弯曲强度和齿面接触强度进行了有限元仿真,验证了有限元模型及结果的真确性。
标签:爬升齿轮;齿条;有限元在海洋石油勘探开发中,自升式海洋平台是使用数量最多的平台。
自升式平台主要采用齿轮齿条升降系统,其齿轮齿条强度是我国自主研发自升式平台升降系统的关键技术之一。
为了对设计和优化提供指导,需要对大模数齿轮齿条的强度进行仿真分析研究。
1齿根弯曲强度有限元模型的建立本文通过CAD软件生成齿轮的几何模型,然后再导入ANSYS生成有限元模型。
研究对象为我公司开发海洋平台的齿轮齿条升降系统的某型号爬升齿轮箱样机。
齿轮齿数7,模数100mm,压力角30°,齿轮厚度240mm,齿条厚度200mm,安装距790mm,齿轮材料ANSI4340,齿条材料ASTM514。
2 齿轮齿条弯曲强度分析齿轮齿条啮合接触过程是一个动态的时间历程,在这个过程中接触位置和接触区域大小均会随着时间而变化,但是在接触的某一瞬时却是相对静止,因此可以采用静态载荷计算接触过程中某一瞬时轮齿的受力及变形情况。
2.1齿轮齿条有限元模型建立齿轮齿条的三维模型导入ANSYS后,首先要进行网格的划分。
采用以六面体矩形单元为主,在接触区域以及齿根圆角区域,需要细化的区域使用四面体网格,以便保证使用较少的节点和单元数目就能达到较高的计算精度的目的。
图1所示。
2.2齿轮齿条接触的设置轮齿在啮合的过程中,接触区域的材料会发生一定的形变,因此齿轮齿条在啮合时的接触区域为一个小面,在ANSYS 中可以采用面—面接触单元来模拟轮齿的这种接触行为。
分别选择齿轮和齿条相接处的接触面作为目标面和接触面,建立接触对。
2.3约束和载荷的施加本计算约束齿轮的轴向和径向自由度,周向自由度不约束;将齿条的左右两个端面定义为零位移约束。
自升式海上钻井平台升降系统技术特点分析 (1)

随着海洋开发战略的不断发展,对于海洋工程 装备的需求将日益旺盛,从自升式海上平台升降系 统的发展趋势来看,应着手研究开发电驱动式升降 系统。
参考文献 [1] 《自升式海洋平台齿轮齿条升降系统的研究》 作者:孙永泰
《石油机械》 2004-10-10. 收稿日期:2011-03-09
以每种新的传动形式的升降机构都需要进行破坏试
见表1电动齿轮齿条升降系统厂家名称法国blm荷兰msc美国letourneau驱动方式电动机驱动电动机驱动电动机驱动自升式海上平台升降系统汇总升降单元型号额定提升力c50180tc105270t150t300t170t200t450t270t320t360t齿条型式升降单元布置方案预压拔桩提桩等等每种工况过程中升降机构的受力状况以及升降速度的变化都需要进行分析否则对于升降系统的结构形式和传动方式选择都无法进行
725KIP 800KIP
(320t) (360t)
单边齿条 布置:18
机构的设计制造经验,对于其受力分析、动力学研
究、振动噪声控制、弹性啮合原理以及载荷分配等
(2) 国内方面
方面还需要进一步的研究;
近几年,国内从事海洋工程的各大公司和科研
(3) 高强度超大模数齿轮的设计与制造 与齿条啮合的小齿轮为超大模数齿轮,模数一
驱动 升降单元型号 齿条
升降单元
受力状况以及升降速度的变化都需要进行分析,否 名称
则对于升降系统的结构形式和传动方式选择都无法 法国
BLM
进行;
方式
电动机 驱动
(额定提升力) 型式
布置方案
C50 (180t) C105 (270t)
齿条数/桩腿:2 双边齿条
C50 布置:36 或单边齿条
自升式海洋钻井平台升降系统齿轮齿条啮合接触分析

工业技术科技创新导报 Science and Technology Innovation Herald57渤海某自升式海洋钻井平台通过齿轮齿条升降装置进行升降调节,以适合不同工作海况水深。
齿轮齿条升降装置的工作是通过液压马达或电机驱动与齿条相对应的小齿轮,小齿轮沿齿条运动,实现平台的升降。
作为升降系统的主要承载力部件,齿轮齿条啮合处既需要在升降状态下完成桩腿及甲板的升降,还需要在正常工作状态及风暴自存状态下支撑船体甲板及相关设备,长时间处于承受重载的状态(包括动载荷)。
因此,齿轮齿条的应力分布和强度是关系到整个平台安全性能的一个重要因素[1-3]。
目前在海洋工程领域,关于自升式钻井平台齿轮齿条强度的校核,尚无较为明确的规范,一般认为对于这种低速、重载、开式齿轮齿条的强度校核,以齿根弯曲应力强度校核为主。
该文利用有限元分析软件作为工具,采用接触分析自升式钻井平台齿轮齿条强度校核进行探讨。
1 平台参数渤海某平台,平台主体结构为驳船型式。
平台有三根圆柱桩腿,内部设有环筋等骨材,每根直径2.74 m(9英尺),长56.7 m,平台承受载荷通过桩腿传递给桩靴。
每根桩腿设有两列齿条,成180度夹角,桩腿壁厚有1.5~2.5 inches不等。
桩腿材料采用高强度钢,型号为A B S D H36,屈服强度为51ksi (3587 kg/cm 2)。
平台单桩最大承载力为600KIPs (272.2 t/小齿轮),齿轮齿条具体数据如下:齿轮:3/16"pitch7齿渐开线齿面齿轮齿轮厚度:8.5"齿宽:8.3074"分度圆直径:37.833"齿轮材料:SAE4340 齿条:直线齿面齿条厚度:5"齿根深:5.333"齿顶高:5.177"齿条材料:AISI 87352 计算模型为了模拟齿轮齿条啮合机构,在建模时,需要定义齿轮、齿条接触面为接触对,在计算上属于非线性接触问题。
自升式海洋钻井平台升降系统的分析与研究

自升式海洋钻井平台升降系统的分析与研究作者:吴碧珺来源:《科技创新与应用》2015年第16期摘要:随着世界经济的飞速发展,海洋开发己经成为世界技术革新的重要内容,而海洋油气田的开发又是现今海洋资源开发利用的重中之重。
自升式海洋钻井平台是海洋油气勘探和开发的主要装备。
目前,国内使用的钻井平台中的控制系统基本都由国外制造,国内对其升降系统的分析相对较少。
所以,探讨和研究这一方面的内容意义深远。
关键词:自升式平台;升降系统;齿轮齿条式1 概述升降系统是自升式海洋钻井平台的关键部分。
其位置位于平台的主体和桩腿的交接处,作用是让桩腿和船体作相对的上下运动,从而使得平台主体能上下移动并将其固定在桩腿的某一位置。
根据升降系统结构形式的不同,一般可分为液压油缸式升降系统和齿轮齿条式升降系统。
液压油缸式的优点是:油缸的结构简单,力的传递直接,安全性高。
缺点是:桩腿升降框架的结构庞大,用钢量很大,操作的工序相对更复杂。
齿轮齿条式的优点是:升降运动连续性好,传动的速度快,可调速,受载均匀,操作简单,井位易对准。
缺点是:齿轮齿条的制作难度大,成本高,控制相对复杂。
由于海洋环境比较恶劣,平台升降所需要的时间对于平台的安全性就显得非常重要,同时运用齿轮齿条式升降平台可减少平台的就位费用,因此目前多采用此类系统。
2 齿轮齿条升降系统的设备组成齿轮齿条式升降系统通常由升降装置、升降框架、导向装置、桩腿以及电控系统组成。
升降装置一般由电动机、减速箱、制动器、小齿轮等组成,如图1所示。
电动机以前常用的是滑差式电机,后来变频技术越来越成熟,而且控制方便,于是逐渐取代了滑差式电动机。
减速箱一般由平行轴轮系和行星轮系两部分构成,速比很大,有的甚至上万。
制动器通常选择的是电磁圆盘式,其扭矩一般不小于1.2倍的暴风载荷。
小齿轮由高强度合金钢经特殊工艺加工而成,齿数一般为7齿,模数通常为80以上,目前世界上最大的小齿轮模数已经达到了110。
图1 齿轮齿条升降装置升降框架一般为封闭性环梁结构,如图2所示,它是连接升降装置和平台主体的框架,起承上启下的作用。
自升式海上钻井平台液压升降系统解析

自升 式 海 上 钻 井 平 台 液 压 升 降 系 统 由一套 独 立 的 液 压 驱动 系 统提 供 动 力 ,确 保 桩 腿 可 克 服泥
土 、砂 石 等 带 来 的 阻 力和 升 降平 台 自身 的 重 力 , 将 桩 腿 插 入 或 拔 离 海床 以及 升 降整 个 平 台 。根 据 平 台升 降工 况 、作 业 工 况 、 自存 工况 、预 压 工 况 的 重量 重心 计 算 及 环 境 载 荷 的 计 算 结 果 ,确 定升 降 系 统 的 正 常升 降 能力 、预 压 升 降能 力 、 船 体 升 降 速 度 。海 上平 台液 压 升 降系 统 设 计 应 满 足 以下 功 能 :确 保 系 统 有 足够 的动 力 克服 泥 土 、砂 石 等 阻 力 与 平 台 自身 的 重 力 ,将 桩 腿 体 插 入 或 拔 离 海
( )上 插销 卸 载 。控 制 主 油缸 继 续缩 回 ,直 2 至 上插 销 纵 向位 置 传 感 器 发 出 信 号 停 止 动 作 。即 上插 销 已经脱 离 桩腿 内孔壁 , 载 荷 已经 全 部 转 移
到下 插销 ;
销 已经 脱 离 桩 腿 内孔 壁 , 载荷 已经 全 部 转 移 到 下 插销。
主 油 缸 为 桩 腿 提 供 主 要 动 力 ,顶 部 与 底 部 分 别 连 接 上 环 梁 和 下环 梁 机 构 。 除此 之 外 在 主 油 缸 上 还 安 装 了位 移 传 感 器 与 行 程 开关 ,协 助 主 油缸 与插 销 油缸 协调 工作 。
销 已经 脱 离 桩腿 内孔 壁 ,载 荷 已经 全 部 转 移 到 上 插销 。 ( )下插 销 拔 出 。控 制 下插 销 油缸 缩 回 ,拔 6 销 到位 后 , 下插 销 水 平 位 置 传 感 器 发 出信 号 , 系 统 自动停 止插 销油 缸动 作 。 ( )重 复步 骤 ( )。 7 1
海洋平台爬升齿轮轴的开发与研究
海洋平台爬升齿轮轴的开发与研究发表时间:2017-11-09T18:54:47.327Z 来源:《基层建设》2017年第23期作者:唐亚宁[导读] 摘要:自升式海洋平台爬升装置系统是钻井平台设备装置中的关键组成部分。
本文主要阐述了平台升降装置中关键部件爬升齿轮轴的产品研发、生产工艺中关键问题的解决方案、材料性能与制造工艺的对应关系及实现路线。
韶关市中机重工股份有限公司广东韶关 512000摘要:自升式海洋平台爬升装置系统是钻井平台设备装置中的关键组成部分。
本文主要阐述了平台升降装置中关键部件爬升齿轮轴的产品研发、生产工艺中关键问题的解决方案、材料性能与制造工艺的对应关系及实现路线。
关键词:爬升齿轮轴研发、技术工艺与材料性能指标的相互影响、解决方案1.概述自升式平台是海洋工程装备最重要的装备.随着能源的发展、海洋石油天然气的钻探、海洋施工等,需要大量的自升式平台。
平台的发展衡量了一个国家海洋工程装备的水平。
目前,海洋平台分为石油钻井平台、采油平台、修井平台、施工工程平台、生活服务平台等。
近年来,随着我国装备制造业的发展,在平台制造技术上取得了突飞猛进的进步,我国现已成为世界上最主要的平台制造国和供应国。
2.项目要求从上世纪90年代以来,爬升装置由以前的插销式进步为桁架式的齿轮齿条式。
桁架式自升平台依靠爬升装置进行上下运动,以达到钻井、工程施工的目的。
爬升齿轮轴是升降装置中最关键的零部件,每个齿轮最大工作载荷为600吨,并需要通过风暴试验,其许用应力要达到工作应力的2.5倍以上,所以对爬升齿轮轴材料要求性能比较苛刻,需要材料具有高强度、高耐疲劳性、高低温冲击韧性、高可靠性等特点;例如JU2000E平台(400英尺)的爬升齿轮轴的性能要求如下:按照船级社要求,该零部件均为本体取样,所以对部件的制造工艺和设计提出了新的要求。
针对该材料的高性能要求,我公司于2007年开始进行研制开发,开发的产品已成功取代韩国、德国进口。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
浅谈自升式海洋钻井平台齿轮条爬升与锁紧系统设计
摘要:自升式海洋钻井平台齿轮条爬升与锁紧系统是取得海洋中石油的设备装置中的关键组成部分,分析设计自升式海洋钻井平台齿轮齿条的升降装置与锁紧系统在海中作业的功能,在这个基础上根据现有情况对平台进行改善优化。
了解齿轮齿条爬升与紧锁系统的基本工作原理、自升式海洋钻井平台设计方向,为目前海中石油资源的拓展方向提供强大的基础机械能力。
关键词:自升式海洋钻井平台;齿轮条爬升;锁紧系统
1.基本原理
工作平台、桩腿、爬升系统与锁紧系统、控制装置、钻井装置(包括动力设备和起重设备)、以及生活区(包括直升飞机平台)这几个部分是自升式海洋钻井平台的主要组成部分。
目前,常用的平台为三桩腿自升式海洋钻井平台,其中的关键零件是位于三桩腿上的爬升系统和锁紧装置,这两者的设计性能优劣会对自升式海洋钻井平台的工作效率、开发石油成果等造成很大的影响,因而我们主要从这两个方面去考虑优化目前所使用的海洋作业机械。
电动机、齿轮齿条爬升结构、桩腿等几个部分构成自升式海洋钻井系统的爬升装置。
下面爬升系统的工作原理的解析:在电动机提供动力的情况下齿轮沿着齿条的运动,带动海洋钻井平台在桩腿上做缓慢爬升的运动,爬升到任何所需要到达的工作位置;然后锁紧系统通过锁紧齿条与桩腿齿条啮合进行锁紧,从而将甲板上重量和运行时的载荷转移到海底的平面,桩腿和平台的上升和下降都依赖于爬升系统而且在正常工作状态及遭遇天气严重巨变状态下支撑船体甲板及相关设备,它有很大的刚度和载重范围使得绝大部分的桩腿受压传至主弦管形成的各向轴向力达到最小程度,易于达到以降低水阻力来增加工作水深度,自升式钻井平台得以进入更深及海况更恶劣的海域工作。
当到达油井的规定位置以后我们可以利用爬升系统将船体升离水面从而为石油的提取做好准备,在提取石油结束后将船体缓慢降回海平面,再利用爬升系统将桩腿升起来使平台重新恢复成漂浮状态然后再拖拉到下一个油井位置开始作业。
电动机、复位装置、固定搁置装置、锁紧卡爪等几个部分组成了锁紧系统。
以下锁紧系统的工作原理分析:当爬升系统带动平台上升或下降到规定位置时电动机自动停止工作并且启动自锁功能,使平台固定在规定的位置上,到达规定位置后,锁紧系统的锁紧功能自发开始启动,前端位置上的卡爪在液压缸的推动下与桩腿齿条相互啮合,上下楔型块会发生相对闭合的运动牢牢地夹紧卡爪,与此同时,通过卡爪、桩腿将整个钻井平台的重量转移到海平面上;当钻井平台需要更改作业位置时,因为卡爪和齿条还是处于啮合的锁紧状态,因而需要先解锁才可以再次移动平台。
相对于于爬升系统来说锁紧系统的主要是通过卡爪与桩
腿上的齿条啮合与分离来控制桩腿的定位状态。
2.方案设计方向
2.1爬升系统的设计
基于上面对原理的了解,可对以下几方面的爬升系统进行设计。
2.1.1动力结构方面
爬升系统的驱动装置由开始的单个电动机带动齿轮运动发展到现在的一轴二输出(一个电动机带动两个小齿轮,优化以后的动力装置既提高了平台工作时的工作效率,又降低了消耗的能源和机器建造的成本。
比较一轴二输中两个小齿轮分布位置不同的情况下的优缺点,综合考虑选择最优方案。
2.1.2齿轮的齿面接触应力分析
考虑到了齿轮相互之间的不同接触角度会对钻井平台的整个运行的顺畅程度的影响,每一组的齿轮都以不同的接触角度接触从而实验出最佳的效果。
齿轮和齿轮条间的接触力大小:接触力度过大容易损坏齿轮和齿条从而导致作业运行的终止。
接触力过小不能取得最好的工作效率,不利于工作的质量。
2.1.3运用三维方法构建模型
现在采用三维空间方法研究自升式海洋钻井平台齿轮条爬升与锁紧系统的比较少,但是不可否认这种方法能更全面和直观。
对于装置可能遇到问题的提前检验有很好的效果。
2.2锁紧装置的设计
2.2.1控制程序
海洋作业的频繁性、交变频繁地使用会使装置出现延缓、错位、卡死等问题。
现在的海洋作业中锁紧和解锁的时间占据很大的比例,有效地解决程序控制问题将大大提高作业的可行性和效率性。
2.2.2动态负荷转移功能
动态负荷转移功力是自升式海洋钻井平台承受海洋风暴的尺度,以及在极限状态下的的可靠性。
可采取以下试验步骤,其中每一步之后都要做好数据记录。
检查装置预锁紧状态再锁紧。
启动增压油缸,当压力达到所需值时停止。
启动锁紧装置锁定。
紧装置高压系统的卸压。
实验时间控制在1-2小时,这是得到实际效果的最佳持续时间。
2.2.3自动复位装置
卡爪与齿条相互啮合后,位置多多少少都会有稍许的偏移。
在拉出时需要恢复到原来位置,不然逐次偏累积后位置会越偏越远,自动复位装置灵敏度越高对于频繁的海上作业越能提高作业的效率。
3.总结
齿轮齿条升降装置以及齿条锁定系统是自升式海洋钻井平台的两种主要方式。
重量、体积都很大的自升式海洋钻井平台的爬升速度不能过快(一旦出现故障重力惯性易导致脱轨)锁紧要牢固(稳固的平台是一切海中作业的基础)。
对自升式海洋钻井平台各方面的设计均是为了提高平台作业安全及作业能力,根据现在作业的应用,保证效率的提高。
通过各个方面的机械调试,得到操作更简便,性能优良,能消除装置在解锁时的卡死等的海上作业自升式海洋钻井平台。
参考文献:
[1]张争艳.自升式海洋钻井平台齿轮条爬升与锁紧系统设计与研究[D].武汉理工大学,2011.
[2]巴建彬,李士喜.自升式海洋钻井平台升降系统齿轮齿条啮合接触分析[J].科技创新导报,2014,19:57-58.
[3]刘纯青.自升式海洋钻井平台锁紧装置国产化前景[J].石油和化工设备,2012,11:24-27.
[4]王运龙.自升式钻井平台方案设计技术研究[D].大连理工大学,2008.。