松下A5驱动器调试
松下伺服放大器的使用
松下A5系列伺服驱动器使用说明
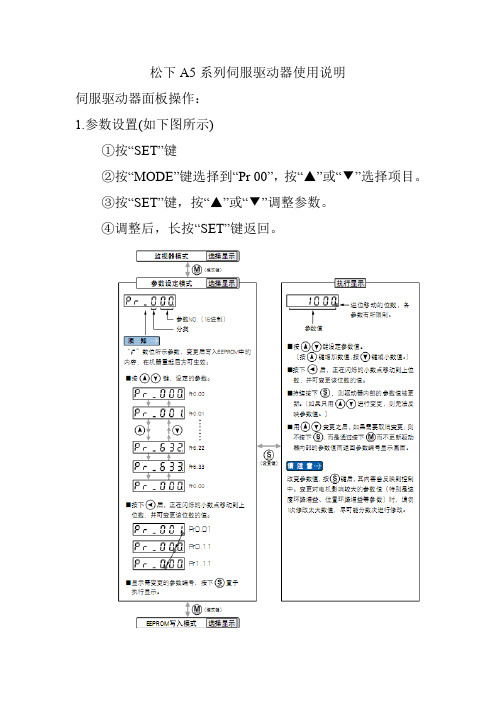
伺服驱动器面板操作:
1.参数设置(如下图所示)
①按“SET”键
②按“MODE”键选择到“Pr 00”,按“▲”或“▼”选择项目。
③按“SET”键,按“▲”或“▼”调整参数。
④调整后,长按“SET”键返回。
2.参数保存,数据设好,按“SET”确认。
①按“MODE”键选择到“EE-SET”后
②按“SET”键确认,出现“EEP-”,
③按“▲”键3S后,出现“Finsh”/“reset”然后重新上电既保存。
(如图所示)
3.绝对编码器清零。
(如图所示)。
4、参数初始化(恢复出厂)
按下“MODE”键,再按“▲”或“▼”选择功能项目。
选择好功能后,按“SET”键开始执行该功能。
然后按下“▼”键持续3S。
依次出现“start”→“finish”表示执行完成。
5、报警解除操作。
(如图所示)
当出现报警且故障解除后,可通过以下操作解除报警。
附:详细内容请参照“松下伺服A5系列.pdf”。
Pr005=0 指令脉冲输入方式选择pr007=1 pr008=350(马达转一圈需要的脉冲数0)
Dp_spd电机转速。
(完整版)松下A5伺服电机驱动器调试步骤

松下A5伺服电机驱动器调试步骤A:对于没有使用X5的调试步骤:(驱动器开环模式)应用中松下A5驱动器处于位置控制模式,需要调整的参数:各参数设置后需要保存,除Pr0.03外,其他的参数修改需要重新上电才有效;调试步骤:(默认的不用修改)1.更改驱动器的输入模式为脉冲+方向模式:P0.07改为3;2.根据螺距(设计值)和光栅尺分辨率比值更改马达分辨率:螺距不用很精确,使用设计的值即可,一般为5/10/12/16等;假设螺距为10mm,光栅尺分辨率为0.5um,则螺距除以光栅尺分辨率为(10/0.5)x 1000 = 20000;假设螺距为10mm,光栅尺分辨率为1um,则螺距除以光栅尺分辨率为(10/1)x 1000 = 10000;计算结果就是要填入的马达分辨率,计算结果写入Pr0.08;3.根据马达分辨率,螺距,光栅尺分辨率可计算不同的脉冲输入方式(光电或长线)下机台运行的最高速度:假设马达分辨率为20000,螺距为10mm:光电接口下,最高500K输入,也就是500 000,则马达最高转速为500 000/20 000 = 25转每秒;转换成机台速度就是转速x 螺距= 25 x 10mm = 250mm/S;长线模式下,最高4M输入,也就是 4 000 000,则马达最高转速为4000 000/20 000 = 200转每秒;转换成机台速度就是200 x 10 = 2000mm/S;根据实际需要选择脉冲输入方式,并写入驱动器Pr0.05中。
不同脉冲输入方式信号线X4接法不一样:光电模式(Pr0.05 = 0,默认,一般使用该模式即可)4.设置好脉冲输入方式和马达分辨率后,就可使用DEMO软件调试机台了。
5.机台运动正常后,如果机台响应慢,则可增加机台的设定刚性,也就是加大Pr0.03的值。
注意刚性过大时,机台会振动,需要减小刚性值。
6.可根据需要在DEMO的参数配置中选择各轴的全闭环,然后调整控制器的PID;7.让机台运行半个小时以上,将Pr0.02的值改为0,关闭自动调整;B.对于使用X5的调试步骤:(驱动器闭环模式)(称为光栅尺全闭环模式,此模式下控制器需设为开环,即在DEMO中不选择全闭环)接线方法:光电模式(Pr0.05 = 0,默认,一般使用该模式即可)需要调整的参数:各参数设置后需要保存,除Pr0.03外,其他的参数修改需要重新上电才有效;调试步骤:1.先按照A驱动器开环模式使机台运行正常,注意控制器中不用选择轴的全闭环;2.设定电机转一圈时光栅尺的计数值;计算方法:马达转一圈相当于机台跑一个螺距的距离,所以用螺距除以光栅尺分辨率可计算出Pr3.25 的值;螺距不用很精确,使用设计的值即可,一般为5/10/12/16等;例如螺距为10mm,光栅尺为1um,Pr3.25的值为(10/1) X 1000 = 10000;将计算出的值设进Pr3.25中,保存并重新上电。
松下伺服调试参数
松下A5 系列伺服参数一、松下MINASA5系列伺服驱动器参数设定:用松下MINASA5系列伺服驱动器,设定以下参数后,机床即可工作。
但是,为优化机床性能,请详细参阅伺服驱动器技术资料。
参数号功能设定值设定值说明Pr5.28* LED 初始状态6 通过设置此参数来监测脉冲数的接发是否正确。
在维宏控制系统里面,通过脉冲监测,来检测控制卡发出脉冲是否正确,从而可判断出是否存在电气干扰问题。
(该参数为指令脉冲总和)Pr0.01* 控制方式选择0 0 :位置控制1 :速度控制2 :转矩控制Pr0.02 设定实时自动调整调试设定0 :无效1 :标准3 :垂直轴Pr0.03 实时自动调整机器刚性设定调试设定0 —31 ,设定值越高,响应越快,但值太高,容易产生振动。
实时自动增益调整时机器刚性设定。
Pr0.04 惯量比调试设定设置机械负载惯量对电机转子惯量比之比率。
设定值(%)=(负载惯量/ 转子惯量)*100。
实时自动增益调整时,此参数可自动估算并每30 分钟在EEPROM 中刷新保存。
Pr0.05 指令脉冲输入选择1 0 :光电耦合器输入(低速接口)1 :长线驱动器专用输入(高速接口)Pr0.07 指令脉冲输入方式选择3 设定脉冲指令输入方式为脉冲串加符号,负逻辑。
Pr0.09第一指令脉冲分倍频分子需计算1〜10000典型值:螺距5mm编码器分辨率10000,连轴器直拖,脉冲当量0.001mm时,Pr0.09 = 10000 Pr0.10 = 螺距5mm / 脉冲当量0.001mm = 5000 即Pr0.09/Pr0.10=10000/5000=2/1Pr0.10 指令脉冲分倍频的分母需计算1 〜10000二、松下驱动器的调节松下伺服器修改参数设定值后,须选择EEPROM写入模式。
方法如下:①按MODE键,选择EEPROI W入显示模式EE_SEt;②按SET键,显示EEP ―;③按住上翻键约3秒,显示EEP --------------- 到一--------------------- 到StArt, 参数保存完显示F iniSh .表示参数写入有效,显示rESEt .表示需关断电源,重新通电设定值才能生效;显示Error .表示写入无效,需重新设定参数。
Panasonic A5系列伺服驱动器参数设定说明

Panasonic A5系列伺服驱动器参数设定说明一、需要设定的参数:
参数编号Pr. 参数名称设定值说明
0.01* 控制模式选择0 位置控制模式
0.02 实时自动调整设置 1 基本
0.03 实时自动增益的机械刚性选择16
0.04 惯量比1000
0.07* 指令脉冲驶入方式 3 脉冲序列+符号
6.04 JOG速度设定100
注:编号带*之参数,其设定值必须在控制电源断电重启之后才能修改成功。
二、参数的修改
1、按设置键S进入d**.uEP;
2、按模式键M进入参数Prr.***,再按设置键S进入参数修改模式
三、EEPROM写入模式
1、按设置键S进入d**.uEP;
2、按模式键M进入参数EE_SE*
3、按住向上键约5秒后,显示EEP- , -逐渐增加直到显示ReSE*或FiniSh为止,设置参数写入完毕。
四、JOG试运行方法:
1、按设置键S进入d**.uEP;
2、按模式键M进入参数RF_RCL,再按向上或下的箭头直到出现RF_JOG
五、各模式结构
五、参数初始化。
松下伺服调试参数
松下伺服调试参数文稿归稿存档编号:[KKUY-KKIO69-OTM243-OLUI129-G00I-FDQS58-松下 A5系列伺服参数一、松下MINAS A5系列伺服驱动器参数设定:用松下MINAS A5系列伺服驱动器,设定以下参数后,机床即可工作。
但是,为优化机床性能,请详细参阅伺服驱动器技术资料。
参数号功能设定值设定值说明Pr5.28* LED初始状态 6 通过设置此参数来监测脉冲数的接发是否正确。
在维宏控制系统里面,通过脉冲监测,来检测控制卡发出脉冲是否正确,从而可判断出是否存在电气干扰问题。
(该参数为指令脉冲总和)Pr0.01* 控制方式选择 0 0:位置控制 1:速度控制 2:转矩控制Pr0.02 设定实时自动调整调试设定 0:无效 1:标准 3:垂直轴Pr0.03 实时自动调整机器刚性设定调试设定 0—31,设定值越高,响应越快,但值太高,容易产生振动。
实时自动增益调整时机器刚性设定。
Pr0.04 惯量比调试设定设置机械负载惯量对电机转子惯量比之比率。
设定值(%)=(负载惯量/转子惯量)*100。
实时自动增益调整时,此参数可自动估算并每30分钟在EEPROM中刷新保存。
Pr0.05 指令脉冲输入选择 1 0:光电耦合器输入(低速接口) 1:长线驱动器专用输入(高速接口)Pr0.07 指令脉冲输入方式选择 3 设定脉冲指令输入方式为脉冲串加符号,负逻辑。
Pr0.09 第一指令脉冲分倍频分子需计算 1~10000 典型值:螺距5mm,编码器分辨率10000,连轴器直拖,脉冲当量0.001mm时,Pr0.09=10000 Pr0.10=螺距5mm /脉冲当量0.001mm=5000 即:Pr0.09/Pr0.10=10000/5000=2/1Pr0.10 指令脉冲分倍频的分母需计算 1~10000二、松下驱动器的调节松下伺服器修改参数设定值后,须选择EEPROM 写入模式。
方法如下:①按 MODE键,选择EEPROM写入显示模式EE_SEt;②按 SET键,显示EEP -;③按住上翻键约3 秒,显示EEP ――到――――――到StArt,参数保存完显示FiniSh.表示参数写入有效,显示rESEt.表示需关断电源,重新通电设定值才能生效;显示Error.表示写入无效,需重新设定参数。
松下A系列伺服驱动器参数设定说明

Panasonic A5系列伺服驱动器参数设定说明一、需要设定的参数:参数编号Pr. 参数名称设定值说明0.01* 控制模式选择0 位置控制模式0.02 实时自动调整设置 1 基本0.03 实时自动增益的机械刚性选择160.04 惯量比10000.07* 指令脉冲驶入方式 3 脉冲序列+符号6.04 JOG速度设定100注:编号带*之参数,其设定值必须在控制电源断电重启之后才能修改成功。
二、参数的修改1、按设置键S进入d**.uEP;2、按模式键M进入参数Prr.***,再按设置键S进入参数修改模式三、EEPROM写入模式1、按设置键S进入d**.uEP;2、按模式键M进入参数EE_SE*3、按住向上键约5秒后,显示EEP- , -逐渐增加直到显示ReSE*或FiniSh为止,设置参数写入完毕。
四、JOG试运行方法:1、按设置键S进入d**.uEP;2、按模式键M进入参数RF_RCL,再按向上或下的箭头直到出现RF_JOG五、各模式结构五、参数初始化R-----0 上电初始画面: 按1下S 键,到下一画面按1下M 键,进入了参数设置的首个画面这是参数设置的首个参数号00,可以通过 和 来改变到我们需要设置的参数号,用 可以改变我们所修改的数的位数,比如要 设置PR---54,需要从00改为54,可以单 纯通过 和 按到54,也可以先修改为04,然后通过把4右下方的光点移到十位数即0的右下方,再按把0改为5,那么就由PR —00调整到PR —54按一下S 就进入到此参数号的参数值显示dp-5pdPR--00PR--54- - - - - -此时按以及三键就可以来修改此参数值,修改参数值和修改参数号的方法是相同的,比如设定为150,可以先用将光点移到十位数的右下方,改为5,再将光点移到百位数右下,改为1即改为了150150参数值修改完成,按1下S,退到上一画面PR--54按压M键,直到出现下一画面EE—SET按1下S,进入到下一画面EEP- - -此时按住(约5秒)直到出现下一画面(这表示参数保存完成)按1下S 退到上一画面按压M ,直到切换到监视模式,M 为模式切换键,不停的按会在几个模式之间循环显示,现在要通过按M 到监控模式按1下S ,退回到初始画面这样PR —54 的参数值就被我们设置完成,其它的参数值设置方法相同。
松下伺服A5面板操作

A5面板操作一、需要设定的参数二、监视器的观测1、驱动器上电后按一次设置键S进入d01.SPd(电机转速),按3次上键显示d04.trq(转矩指令),再按一次设置键S进入监控值状态;2、驱动器上电后按一次设置键S进入d01.SPd(电机转速),按4次上键显示d05.nPS(反馈脉冲总和),再按一次设置键S进入监控值状态;3、驱动器上电后按一次设置键S进入d01.SPd(电机转速),按5次上键显示d06.cPS(指令脉冲总和),再按一次设置键S进入监控值状态;4、驱动器上电后按一次设置键S进入d01.SPd(电机转速),按13次上键显示d15. oL(过载率),再按一次设置键S进入监控值状态;5、驱动器上电后按一次设置键S进入d01.SPd(电机转速),按9次下键显示d27. Pn(PN 间电压),再按一次设置键S进入监控值状态;三、参数的修改1、驱动器上电后按一次设置键S进入d01.SPd;2、按一次模式键M进入参数设定模式PAr.000,通过上、下、左键选择所要修改的参数,按设置键S进入该参数的设定值;3、把对应参数的设定值修改后,再按住设置键S约2秒后,界面自动返回到对应的参数设定模式PAr.***;四、EEPROM写入模式1、在返回到对应的参数设定模式PAr.***后,再按一次模式键M进入参数EEPROM写入模式EE_SEt ;2、按一次设置键S进入EEP - 模式;3、再按住向上键约5秒后,显示EEP- - -逐渐增加直到显示rESEt或FiniSh为止,设置参数写入完毕。
五、JOG试运行方法1、驱动器上电后按一次设置键S进入d01.SPd;2、按3次模式键M进入辅助模式AF_ACL,按4次向上键直到出现AF_JOG;3、按一次设置键S进入JOG - 模式;再按住向上键约5秒后,显示JOG- - -逐渐增加直到显示rEAdy为止;4、再按住向左键约5秒后,右边的小数点逐渐向左边移动,直到显示SrV_on为止;5、此时按住上、下键即可进行电机正反转。
A伺服参数设置

A伺服参数设置公司内部编号:(GOOD-TMMT-MMUT-UUPTY-UUYY-DTTI-松下A5系列伺服参数一、松下MINAS A5系列伺服驱动器参数设定:用松下MINAS A5系列伺服驱动器,设定以下参数后,机床即可工作。
但是,为优化机床性能,请详细参阅伺服驱动器技术资料。
二、松下驱动器的调节松下伺服器修改参数设定值后,须选择EEPROM 写入模式。
方法如下:①按 MODE键,选择EEPROM写入显示模式EE_SEt;②按 SET键,显示EEP -;③按住上翻键约3 秒,显示EEP ――到――――――到StArt,参数保存完显示FiniSh.表示参数写入有效,显示rESEt.表示需关断电源,重新通电设定值才能生效;显示Error.表示写入无效,需重新设定参数。
三、电子齿轮比的计算(针对松下A5驱动),有两种计算方式:1、松下专有方式:Pr0.08* 电机每旋转一次的指令脉冲数=螺距/脉冲当量2、通用计算方式:当Pr0.08参数为0时,电子齿轮比=分子/分母=Pr0.09/Pr0.10=编码器分辨率*脉冲当量*机械减速比/螺距(=10000*0.001*1/5=2/1)四、惯量比的调节 Pr0.04惯量比该参数对机床运行的平稳性、加工效果等起到了很重要的作用,比如:机床振动、机床电机发出异常声音、加工出来的圆不圆、加工的工件粗糙、加工的工件变形等,只有设置合理的惯量比,机床才能发挥出最大的优势,才能加工出更好的工件。
惯量比的设定有两种方法:其一、手动设定直接手动将估算的惯量比设置到【Pr0.04】里。
如果手动设置,需要你估算该机床的惯量比,既然估算,很难达到理想的惯量比,机床就很难发挥出最大的优势。
其二、自动设定机床运动。
只有适合机床的惯量比,加工出来的工件才是最好的下面我将详细介绍惯量比的自动调节:1) 调节【Pr0.02】实时自动增益调整模式设定【Pr0.02】 X轴、Y轴设为【1】【Pr0.02】 Z轴设为【3】2) 调节【Pr0.03】实时自动调整机械刚性选择该参数非常重要,决定了机床的平稳性以及加工效果。
松下A5伺服说明书

松下A5伺服说明书松下a5伺服说明书篇一:松下A5系列伺服位置控制使用方法松下A5系列伺服位置控制使用方法000)-----按上下键或<键(可移动小数点)到要设定的参数——按S键进入、修改(按上升键或下降键)——按S键保持3秒——按一下M键>写(转载于: 厦门培训考试网:松下a5伺服说明书)入模式(EE_SEb)>再按”S”键>执行显示(EEP -)按上升键保持5秒----EEP --、EEP ---、EEP ----、--------SbRrb---Finish,结束。
三、辅助功能模式(AF_RcL):按上升或者下降键选择项目1、自动补偿调整(AF_oF1、oF2、oF3)AF_RcL>下降键>AF_oF1>S键>oF1 --持续按上升键执行。
2、试运行(JOG)持续按上升键(CW)--rERdy------<键---SrU_on---持续上升键(CCW)3、参数初始化(AF_ini)---按“S”键----ini----持续按上升键5秒 -------Finish----------结束4、前面板锁定解除(AF_unL)---按“S”键---unL--持续按上升键5秒----SbRrb----unL------、------------Finish 结束。
以上字母只是近似面板上显示的简码。
四、常见报警及其原因1、“11”---控制电源电压不足电源电压低或者驱动器故障2、“16”过载负载过重或电机电源线相序错误3、“21”编码器通讯异常编码器断线或者虚焊、漏焊、脱焊4、“24”位置偏差过大电机未按指令动作加大Pr0.14的值或者设为0 五、接线1、主电源及编码器接线:2、大功率伺服编码器接线:3、控制端子接线:松下a5伺服说明书篇二:Panasonic A5系列伺服驱动器参数设定说明Panasonic A5系列伺服驱动器参数设定说明一、需要设定的参数:二、参数的修改1、按设置键S进入d**.uEP;2、按模式键M进入参数Prr.***,再按设置键S进入参数修改模式注:编号带*之参数,其设定值必须在控制电源断电重启之后才能修改成功。
松下A5驱动器参数修改

松下A5伺服驱动器参数修改连接驱动器电源和参数写入数据线,将数据线USB接口连接电脑
1,双击打开软件
2,选择“与驱动器通信”,点击“ok”
3,点击“ok”
4,最小化弹出的窗口
5,点击“参数”
6,选择“从驱动器读取”,点击“ok”
7,保存参数,点击“保存”
8,点击“ok”
9,将参数保存到桌面,文件名如“伺服驱动器参数”,点击“保存”
10,点击关闭窗口“关闭”
11,点击“参数”
12,选择“从文件读取”,点击“ok”
13,选择“伺服驱动器参数”,点击“ok”
14,点击“位置控制”,选择“参数一览”
15,修改相应参数,修改完成点击“保存”
16,点击关闭窗口“关闭”
17,点击“参数”,选择“从文件读取”,点击“ok”
18,选择文件,点击“ok”
19,跳出对话框,点击“确定”20,先点击“传送”,再点击“EEP”
20,关闭所有窗口,点击“是”。
A5伺服参数设置之欧阳文创编
松下A5系列伺服参数一、松下MINAS A5系列伺服驱动器参数设定:用松下MINAS A5系列伺服驱动器,设定以下参数后,机床即可工作。
但是,为优化机床性能,请详细参阅伺服驱动器技术资料。
二、松下驱动器的调节松下伺服器修改参数设定值后,须选择EEPROM 写入模式。
方法如下:①按 MODE键,选择EEPROM写入显示模式EE_SEt;②按 SET键,显示EEP -;③按住上翻键约3 秒,显示EEP ――到――――――到StArt,参数保存完显示FiniSh.表示参数写入有效,显示rESEt.表示需关断电源,重新通电设定值才能生效;显示Error.表示写入无效,需重新设定参数。
三、电子齿轮比的计算(针对松下A5驱动),有两种计算方式:1、松下专有方式:Pr0.08* 电机每旋转一次的指令脉冲数=螺距/脉冲当量2、通用计算方式:当Pr0.08参数为0时,电子齿轮比=分子/分母=Pr0.09/Pr0.10=编码器分辨率*脉冲当量*机械减速比/螺距(=10000*0.001*1/5=2/1)四、惯量比的调节 Pr0.04惯量比该参数对机床运行的平稳性、加工效果等起到了很重要的作用,比如:机床振动、机床电机发出异常声音、加工出来的圆不圆、加工的工件粗糙、加工的工件变形等,只有设置合理的惯量比,机床才能发挥出最大的优势,才能加工出更好的工件。
惯量比的设定有两种方法:其一、手动设定直接手动将估算的惯量比设置到【Pr0.04】里。
如果手动设置,需要你估算该机床的惯量比,既然估算,很难达到理想的惯量比,机床就很难发挥出最大的优势。
其二、自动设定机床运动。
只有适合机床的惯量比,加工出来的工件才是最好的下面我将详细介绍惯量比的自动调节:1) 调节【Pr0.02】实时自动增益调整模式设定【Pr0.02】 X轴、Y轴设为【1】【Pr0.02】 Z轴设为【3】2) 调节【Pr0.03】实时自动调整机械刚性选择该参数非常重要,决定了机床的平稳性以及加工效果。
松下伺服调试参数.
松下A5系列伺服参数一、松下MINAS A5系列伺服驱动器参数设定:用松下MINAS A5系列伺服驱动器,设定以下参数后,机床即可工作。
但是,为优化机床性能,请详细参阅伺服驱动器技术资料。
参数号功能设定值设定值说明Pr5.28* LED初始状态6 通过设置此参数来监测脉冲数的接发是否正确。
在维宏控制系统里面,通过脉冲监测,来检测控制卡发出脉冲是否正确,从而可判断出是否存在电气干扰问题。
(该参数为指令脉冲总和Pr0.01* 控制方式选择0 0:位置控制1:速度控制2:转矩控制Pr0.02 设定实时自动调整调试设定0:无效1:标准3:垂直轴Pr0.03 实时自动调整机器刚性设定调试设定0—31,设定值越高,响应越快,但值太高,容易产生振动。
实时自动增益调整时机器刚性设定。
Pr0.04 惯量比调试设定设置机械负载惯量对电机转子惯量比之比率。
设定值(%=(负载惯量/转子惯量*100。
实时自动增益调整时,此参数可自动估算并每30分钟在EEPROM 中刷新保存。
Pr0.05 指令脉冲输入选择1 0:光电耦合器输入(低速接口1:长线驱动器专用输入(高速接口Pr0.07 指令脉冲输入方式选择 3 设定脉冲指令输入方式为脉冲串加符号,负逻辑。
Pr0.09 第一指令脉冲分倍频分子需计算1~10000 典型值:螺距5mm,编码器分辨率10000,连轴器直拖,脉冲当量0.001mm时,Pr0.09=10000 Pr0.10=螺距5mm /脉冲当量0.001mm=5000 即:Pr0.09/Pr0.10=10000/5000=2/1Pr0.10 指令脉冲分倍频的分母需计算1~10000二、松下驱动器的调节松下伺服器修改参数设定值后,须选择EEPROM 写入模式。
方法如下:①按MODE键,选择EEPROM写入显示模式EE_SEt;②按SET键,显示EEP -;③按住上翻键约3 秒,显示EEP ――到――――――到StArt,参数保存完显示FiniSh.表示参数写入有效,显示rESEt.表示需关断电源,重新通电设定值才能生效;显示Error.表示写入无效,需重新设定参数。
松下 MINAS A5系列(400V) 交流伺服马达 驱动器 说明书(基本篇)

使用说明书(基本篇)交流伺服马达·驱动器MINAS A5系列(400V)1.开封确认 (2)开箱拆封后,请确认 (2)确认驱动器型号 (2)确认电机型号 (3)2.设置方法 (4)驱动器 (4)电 机 (6)3.系统结构和配线 (8)总配线图(主电路连接器型) (8)总配线图(主电路端子台型) (10)驱动器外设清单 (12)主电路(连接器)的配线要点 (14)主电路(端子台)的配线要点 (15)连接器的接线方法 (16)主电路配线图 (18)电机、制动器连接器的连接 (19)连接器X1的配线 (20)连接器X2的配线 (20)连接器X3的配线 (21)连接器X4的配线 (22)连接器X5的配线 (25)连接器X6的配线 (26)连接器X7的配线 (28)4.参数和模式的设定 (29)概要.设定.连接 (29)参数的构成 (31)5.保护功能 (32)保护功能(错误码) (32)6.保养.检查 (34)7.欧洲EC标准/对应UL标准 (36)外设构成 (38)8.电机内置保持制动器 (42)9.动态制动器 (44)10.确认驱动器和电机的配套型号 (45)20位 增量式规格 (45)17位 绝对式规格 (46)11.规 格 (47)12.质量保证 (50)售后服务(修理) (51)页页■目录铭牌内容型号说明型号说明M D D H T24功率器件的最大额定电流机架型号75~61~4例:10040001N流水号制造月份制造年(2位数)例:20100401生产日生产月生产年( 历)具有标准产品和订购产品两种。
详情请咨询销售店。
●…与您所定购的型号是否相符?●…在运输途中是否有损伤?●…操作说明书(安全篇)是否在内?●…是否附带电源连接器、电机连接器、外置再生放电电阻连接器(仅D,…E型附带)、…安全分流插头?…※F型未附带电源连接器、电机连接器。
铭牌内容例:P1*******N制造编号(序列号)流水号制造月份(2位数)例:20100401生产日生产日生产月历)请正确安装驱动器和电机,以免发生故障和事故。
松下伺服A4A5接线及参数设置

松下伺服A4\A5系列产品接线及参数说明A4/A5脉冲控制接线:以下7根线必须接才能使电机转动。
第29脚接0V,伺服使能作用第7脚接+12/24V第41脚接0V根据你的上位机I/O端驱动电流的大小分别对应选择如下的集电极开路接法:正常的:大于10mA的:第3、5脚都接+5V(串一个100Ω1/2W的电阻)/+12V(串一个1KΩ1/2W 的电阻)/+24V(串一个2KΩ1/2W的电阻);第4脚接脉冲;第6脚接方向小于10mA的:第1、2脚都接+24V(不需串电阻);第4脚接脉冲;第6脚接方向特殊的:大于10ma的:第4、6脚都接0V;第3脚接脉冲;第5脚接方向小于10ma的:第4、6脚都接0V;第1脚接脉冲;第2脚接方向A4参数Pr.02=0(控制模式)Pr.40=0(指令脉冲输入选择)Pr.41=0(指令脉冲极性设置)Pr.42=3(指令脉冲输入模式设置)其他参数为默认值即可实现正反转。
A5参数Pr0.01=0(控制模式)Pr0.05=0(指令脉冲输入选择)Pr0.06=0(指令脉冲极性设置)Pr0.07=3(指令脉冲输入模式设置)其他参数为默认值即可实现正反转。
A4/A5驱动器X6端口与电机的接线方法:(屏蔽线芯至少要大于或者等于0.18平方毫米)驱动器端:第1脚是E5V,第2脚是E0V,第5脚是PS,第6脚是PS非,壳体是屏蔽线;电机端:第4脚是E5V(白色),第5脚是E0V(黑色),第2脚是PS(淡蓝色),第3脚是PS非(紫色),第6脚是FG(屏蔽线);A5/A4参数Pr0.00/Pr.=1(旋转方向设定)Pr0.01/Pr.02=0(控制模式设定)Pr0.02/Pr.21=1(设定实时自动调整)Pr0.03/Pr.22=4/13(设定实时自动调整机器刚性)Pr0.04/Pr.20=100/250(惯量比)Pr0.05/Pr.40=0(指令脉冲输入选择)Pr0.06/Pr.41=0(指令脉冲极性设置)Pr0.07/Pr.42=1(指令脉冲输入模式设置)Pr0.08/Pr.4b=10000(电机每旋转1次的指令脉冲数)A4/A5驱动器X6端口(SM-6P)与电机的接线方法:(屏蔽线芯至少要大于或者等于0.18平方毫米(RVVP4X0.3))驱动器端:第1脚是E5V,第2脚是E0V,第5脚是PS,第6脚是PS非,壳体是屏蔽线;电机端:第4/H脚是E5V(白色),第5/G脚是E0V(黑色),第2/K脚是PS(淡蓝色),第3/L脚是PS非(紫色),第6/J脚是FG(屏蔽线);A4/A5驱动器动力线与电机的接线方法:(动力线芯至少要大于或者等于0.5平方毫米(4 X0.75/2.5))驱动器端-电机端:U-1/A/F(红色),V-2/B/I(白色),W-3/C/B(黑色),接地-4/D/E (黄绿),用航空插头时G、H是接制动器的;。
松下伺服A5面板操作

A5面板操作
精心整理
精心整理
精心整理
精心整理
精心整理
精心整理
二、监视器的观测
1
S
2
S,
按4次上键显示d05.nPS(反
精心整理
馈脉冲总和),再按一次设置键S进入监控值状态;
3
4
S,
按13次上键显示d15. oL(过
精心整理
载率),再按一次设置键S进入
监控值状态;
5
PN
S
精心整理
2
值;
精心整理
3、把对应参数的设定值修改后,再按住设置键S约2秒后,
精心整理
精心整理
键M进入参数EEPROM写入模式
精心整理
EE_SEt ;
2、按一次设置键S进入EEP -
3显
精心整理
精心整理
1、驱动器上电后按一次设置键
精心整理
S进入d01.SPd;
2、按3次模式键M进入辅助模
4右
边的小数点逐渐向左边移
精心整理
动,直到显示SrV_on为止;
5、此时按住上、下键即可进行
精心整理
1、驱动器上电后按一次设置键
精心整理
S进入d01.SPd;
2、按3次模式键M进入辅助模
3
精心整理
精心整理。
(完整版)松下A5伺服电机驱动器调试步骤
松下A5伺服电机驱动器调试步骤
A:对于没有使用X5的调试步骤:(驱动器开环模式)
应用中松下A5驱动器处于位置控制模式,需要调整的参数:
各参数设置后需要保存,除Pr0.03外,其他的参数修改需要重新上电才有效;
调试步骤:(默认的不用修改)
1.更改驱动器的输入模式为脉冲+方向模式:
P0.07改为3;
2.根据螺距(设计值)和光栅尺分辨率比值更改马达分辨率:螺距不用很精确,使用设计的值即可,一般为5/10/12/16等;假设螺距为10mm,光栅尺分辨率为0.5um,
则螺距除以光栅尺分辨率为
(10/0.5)x 1000 = 20000;
假设螺距为10mm,光栅尺分辨率为1um,
则螺距除以光栅尺分辨率为
(10/1)x 1000 = 10000;
计算结果就是要填入的马达分辨率,计算结果写入Pr0.08;
3.根据马达分辨率,螺距,光栅尺分辨率可计算不同的脉冲输入方式(光电或长线)下机台运行的最高速度:
假设马达分辨率为20000,螺距为10mm:
光电接口下,最高500K输入,也就是500 000,则马达最高转速为500 000/20 000 = 25转每秒;
转换成机台速度就是转速x 螺距= 25 x 10mm = 250mm/S;
长线模式下,最高4M输入,也就是 4 000 000,则马达最高转速为4000 000/20 000 = 200转每秒;
转换成机台速度就是200 x 10 = 2000mm/S;
根据实际需要选择脉冲输入方式,并写入驱动器Pr0.05中。
不同脉冲输入方式信号线X4接法不一样:
光电模式(Pr0.05 = 0,默认,一般使用该模式即可)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
• 安装:用PC机调试驱动器, 首先需要安装软件,执行 下面两个文件夹的安装
• 安装完成后,桌面上生成 快捷图标 • 连线,运行软件前先参考 右图进行连线。
松下A5驱动器调试
• 使用调试软件进行驱动器参数导入
执行快捷图标进入A5L调试软件
注: 如果接线正确,在[选 择与驱动器通信]中,会 显示当前与PC机相连接 的驱动器。
松下A5驱动器调试
• 驱动器常见报警处理
上电,Y轴震动很厉害 1) Y轴编码器反馈线接错了,Y1编码器反馈接到Y2轴,Y2轴编码器反馈接到 Y1轴。需要把线接好,在容易犯错的地方,标识好线缆。 马达有啸叫 1)马达增益参数太高,需要根据上面讲的方法把参数降下来。 2)具有机械共振,需要检测共振频率并设定到驱动器参数中<参考共振频率 设定>。 其它问题。
松下A5驱动器调试
• 调试软件中在线修改驱动器的参数
1,首先选择调试软件显示所有参数,选择右图加亮显示 栏。驱动器参数分9类,选择需要修改的参数类。单击参 数设定值,即可以设定驱动器中的参数。
2,参数设定完成后需 要传送再写入,才能生 效。
注:在修改参数前,请参考驱动器的说明手册。确保完全理解参数的意义再 设定。设定参数时,马达必须处于静止状态
Pr100
1500
该值在没有电机啸叫的条 件下,越大越好。 该值在没有电机啸叫的条 件下,越大越好。 该值在没有电机啸叫的条 件下,越小越好。 该值在没有噪音的条件下, 越小越好。
Pr101
700
Pr102 Pr104
60 35
松下A5驱动器调试
• 驱动器常规参数意义及修改指导
续前表 参数号: Pr105 Pr106 Pr107 设定值 1570 750 10000 参数意义和设定指导 第2位置增益。在Pr002=0时,Pr114=1;Pr115=10 时有效, 调试参考Pr100。 第2速度增益。在Pr002=0时,Pr114=1;Pr115=10 时有效, 调试参考Pr101。 第2积分时间常数。在Pr002=0时,Pr114=1;Pr115=10 时有 效,调试参考Pr102。 第2推力滤波时间常数。在Pr002=0时,Pr114=1;Pr115=10 时有效,调试参考Pr104。 速度前馈。系统走3MMF1000的圆,如果出现椭圆,则可以 通过修改该值进行调整。 设定第二增益是否有效;0-第二增益无效;1—第二增益有效。 该参数一般设定为0 第二增益切换条件。如果第二增益有效,则在马达出现啸叫 时,需要同时降低第1和第2增益的参数。 C2的系统中,只采用 第一 增益。 在有两段PID的控制中,该 值一般比较大,即积分效果 减弱。 备注
松下A5驱动器调试
要向驱动器导 入参数,执行 如下操作: 参数->从文件 读取->选择PC 中备份的文件。
注: 如果需要 修改驱动器中 的数据,则选 择从驱动器中 读取。
松下A5驱动器调试
• 传送ቤተ መጻሕፍቲ ባይዱ
把参数传送到 驱动器。
• 写入
把传送到驱动 器的参数写入 驱动器断电保 存记忆体中。
注:
如果只传送而没有写入动作,则驱动器掉电重启之后,传入的参数丢失。
Pr109 Pr110 Pr114 Pr115
30 300 0 0
松下A5驱动器调试
• 驱动器常见报警处理
ER16.0,过载保护 1)Y1和Y2出现扭时容易出现该报警,此时需要对Y1和Y2进行Pitch补偿并 进行回零同步误差校正,即设定#4号马达的[零位偏移量] 2)马达存在机械干涉,摩擦力特别大。此时可以拔掉马达的动力线缆,在 马达自由状态用手推平台,如果感觉推力特别大,需要检视是否有外 钣金和导轨默察干涉。 ER61.0,编码器检测异常 1)一上电即报这个错误,编码器反馈线缆有问题。虚焊,接插头接插不牢。 没有接编码器反馈。动力线缆没有接。都会报这个错误,需要排除接 线错误,或者更换反馈线缆。 2)ER16.0报错太频繁,也会报这个错误。 ER13.1,主电源没上进行伺服使能。 1)动力电源没有上就使能驱动器。这种情况需要首先排除不能正确上动力 电源的问题。
松下A5驱动器调试
• 驱动器常规参数意义及修改指导
对C2高速雕铣机,驱动器经常修改的参数列表如下: 参数号: 设定值 Pr002 Pr003 0 18 参数意义和设定指导 自学习模式,0-不进行自谐调;1-进行标准自谐调。C2统不 进行自谐调。该参数一般设定为0。 系统刚性。当Pr002=1时,该参数起作用。值越大,系统刚性 越高,太大会引起系统啸叫。当系统有啸叫而且Pr002=1时, 要降低该值。该值在C2系统上一般设定为18 第1位置增益。在Pr002=0时,该参数修改有效。该值越大, 系统响应越快。但过大会引起啸叫。如果电机啸叫,则需要 适当降度该参数值。 第1速度增益。在Pr002=0时,该参数修改有效。该值越大, 系统响应越快。但过大会引起啸叫。如果电机啸叫,则需要 适当降度该参数值。 第1积分时间常数。该值越小,积分效果越明显。如果该值太 小,容易引起系统的低频抖动。该值一般设定为60 第1推力滤波时间常数。该值越大,输出推力越光滑。马达的 噪音变小。但是该值越大,系统越滞后。Pr100~Pr102的值要 相应减小,导致系统刚性不足。 备注 C2系统不进行自协调 范围一般为:14~20