OPENCV的MAT类详解
opencv mat 用法

opencv mat 用法OpenCV是一个广泛使用的计算机视觉库,它提供了许多功能和工具,用于图像处理、视频处理、特征提取等任务。
在OpenCV中,Mat 是一个非常重要的数据结构,用于存储和操作图像数据。
在本篇文章中,我们将介绍Mat的基本用法,包括创建、读取、写入和操作图像数据。
一、Mat的创建在使用Mat之前,需要先创建它。
OpenCV提供了多种方法来创建Mat对象,可以根据需要选择合适的方法。
常用的创建Mat的方法包括:1.使用zeros()或ones()函数创建指定尺寸的零矩阵或全矩阵。
2.使用imread()函数从文件中加载图像,并将其存储为Mat对象。
3.使用随机数生成器创建具有一定分布的图像数据。
下面是一个简单的示例代码,演示如何使用imread()函数创建Mat对象:```pythonimportcv2#读取图像并创建Mat对象img=cv2.imread('image.jpg')#显示图像cv2.imshow('Image',img)cv2.waitKey(0)```二、Mat的读取和写入使用imread()函数可以从文件中加载图像数据并将其存储为Mat 对象。
同样地,使用imwrite()函数可以将Mat对象中的数据写入文件。
下面是一个简单的示例代码,演示如何使用imwrite()函数将Mat 对象中的数据写入文件:```pythonimportcv2importnumpyasnp#创建一个随机图像数据data=np.random.randint(0,256,(500,500,3),dtype=np.uint8) #创建Mat对象并设置数据mat=cv2.Mat(500,500,CV_8UC3,data)#显示Mat对象的内容cv2.imshow('Mat',mat)cv2.waitKey(0)#将Mat对象写入文件cv2.imwrite('output.jpg',mat)```三、Mat的数据类型和尺寸Mat对象可以存储不同类型的数据,包括单通道和多通道数据。
OpenCV的Mat数据格式及其遍历的程序资料说明
OpenCV 的Mat 数据格式及其遍历的程序资料说明
在opencv 早期的版本中,图像通过一个叫做IplImage 的结构(structure)存储在内存中。
由于C 语言对程序员高度的信任,因此它需要手动地对内存
进行管理,比如内存的分配和回收,这在大型程序设计中是比较麻烦的。
幸
运地是,C++可以很好地帮助程序员管理内存,因此opencv2.0 后就引入了
C++接口。
但是C++也有缺点,比如说目前大部分的嵌入式系统只支持C 语言,在这些平台上开发opencv 程序的话用C++就不是很好。
cv::Mat 是一个C++类,包含两部分:1)Matrix header,包括矩阵的size、存储方式、矩阵的存储地址等信息;2)指向Marix 的指针ji。
由于图
像处理算法通常都是计算密集型算法,出于程序速度上的考虑,opencv 的设
计应尽可能地避免拷贝大图像,为了解决这个问题,opencv 使用了引用计数
机制(reference counter system)【python 也使用了这个机制,参考之前的博客】。
简单来说,灭个Mat 对象都有自己的header,在进行copy 运算时,只
有headers 和指向矩阵的指针会被拷贝,而矩阵本身不会被拷贝,举个栗子:
上面的三个Mat 对象srcImg,dstImg,C 最终都只想同一个数据矩阵,虽然
它们的headers 是不同的。
对它们其中的任意一个进行修改都会影响另外两个对象。
上面程序的运行结果如图:
当然,如果想拷贝矩阵本身也是有办法的,opencv 提供了两个方法:。
opencv中mat类介绍

opencv中mat类介绍The class Mat represents an n-dimensional dense numerical single-channel or multi-channelarray. It can be used to store (Mat类的对象用于表示一个多维度的单通道或者多通道稠密数组,它可以用来存储以下东西)real or complex-valued vectors or matrices 实数值或复合值向量、矩阵) (grayscale or color images (灰度图或者彩色图)voxel volumes (立体元素)vector fields (矢量场)point clouds (点云)tensors (张量) histograms (though, very high-dimensional histograms may be better直方图,高纬度的最好存放在Sparse stored in a SparseMat )Opencv中mat类是核心类,用于存储图像信息,主要包括两部分,矩阵头信息和矩阵的数据信息。
头信息固定大小,数据信息极大。
Mat类的对象进行赋值和拷贝构造时仅仅生成头信息的备份和数据指针1 cv::Mat a ;//创建矩阵头2 a = cv::imread("xxx.jpg");//读入图像3 cv::Mat b = a ;//复制b和a指向同一个矩阵,增加的时引用计数若要实现实际上的独立赋值,需要使用mat的clone()和copyTo()函数1 cv::Mat c = a.clone();2 cv::Mat d ;3 c.copyTo(d);mat的常用属性datauchar型的指针。
Mat类分为了两个部分:矩阵头和指向矩阵数据部分的指针,data就是指向矩阵数据的指针。
dims矩阵的维度,例如5*6矩阵是二维矩阵,则dims=2,三维矩阵dims=3.rows矩阵的行数cols矩阵的列数size矩阵的大小,size(cols,rows),如果矩阵的维数大于2,则是size(-1,-1)channels矩阵元素拥有的通道数。
OpenCV2:总结篇cv::Mat类

OpenCV2:总结篇cv::Mat类⼀.简介在OpenCV中,可以⽤C++语法的Mat类来表⽰⼀张图像也可以⽤C语法的lpllmage或CvMat结构体来表⽰⼀张图像1.单通道像素值2.多通道像素值OpenCV默认颜⾊顺序为BGR⼆.成员公有函数cv::Mat类能够⾃动管理内存,由矩阵头和指向存储所有像素值的矩阵的指针构成cv::Mat类表⽰⼀个n维的密集数值单通道或多通道数组,它可⽤于存储实数或复数值的向量和矩阵灰度和彩⾊图像体素向量场点云张量直⽅图等1.常⽤的成员函数Mat::Mat()Mat::~Mat()Mat::row // 创建⼀个具有指定了矩阵头中⾏数的参数的矩阵Mat::col // 创建⼀个具有指定了矩阵头中列数的参数的矩阵Mat::rowRange // 为指定的⾏span创建⼀个新的矩阵头,可取指定⾏区间元素Mat::colRange // 为指定的列span创建⼀个⼼得矩阵头,可取指定列区间元素Mat::clone // 创建⼀个数据及其基础数据的完整副本Mat::copyTo //Mat::convertToMat::zerosMat::onesMat::channelsMat::emptyMat::atMat::isContinuous() //判断图像存储是否连续2.不常⽤的成员函数Mat::addref()Mat::adjustROI()Mat::assignTo()Mat::at()Mat::begin()Mat::channels() Mat::checkVertor() Mat::clone() Mat::col() Mat::colRange() Mat::convertTo() Mat::copySize() Mat::copyTo() Mat::create() Mat::cross() Mat::deallocate() Mat::depth() Mat::diag() Mat::dot() Mat::elemSize() Mat::elemSize1() Mat::empty() Mat::end() Mat::eye() Mat::inv() Mat::isContinuous() Mat::isSubmatrix() Mat::locateROI() Mat::mul() Mat::ones() Mat::pop_back() Mat::ptr() Mat::push_back() Mat::push_back_() Mat::release() Mat::reserve() Mat::reshape() Mat::resize() Mat::row() Mat::rowRange() Mat::setTo() Mat::step1() Mat::t()Mat::total()Mat::type()Mat::zeros()3.成员数据class CV_EXPORTS Mat{public:// 标志位int flags;// 矩阵的维数,应该⼤于等于2int dims;// 矩阵的⾏数和列数,如果维度⼤于2,则都为-1int rows,cols;// 指向数据的指针uchar* data;// 指向引⽤计数的指针int* refcount;uchar* datastart;uchar* dataend;uchar* datalimit;MatAllocator* allocator;MSize size;MStep step;};4.构造函数Mat() // 默认构造函数Mat(int row,int cols,int type)Mat(Size size,int type)Mat(int rows,int cols,int type,const Scalar& s)Mat(Size size,int type,const Scalar& s)Mat(int ndims,const int* sizes,int type)Mat(int ndims,const int* sizes,int type,const Scalar& s)Mat(const Mat& m) // 拷贝构造函数Mat(int rows,int cols,int type,void* data,size_t step=AUTO_STEP)Mat(Size size,int type,void* data,size_t step=AUTO_SETP)Mat(int ndims,const int* sizes,int type,void* data,const size_t* steps=0)Mat(const Mat& m,const Range& rowRange,const Range& colRange=Range::all());Mat(const Mat& m,const Rect& roi);Mat(const Mat& m,const Range* ranges);Mat(const CvMat* m,bool copyData=false);Mat(const CvMatND* m,bool copyData=false);Mat(const IplImage* img,bool copyData=false);template<typename _Tp>explicit Mat(const vector<_Tp>& vec,bool copyData=false);template<typename _Tp,int n>explicit Mat(const Vec<_Tp,n>& vec,bool copyData=true);template<typename _tp,>三.cv::Mat 类型转换1.cv::Mat 类转换为 IplImage 类型和 CvMat 类型cv::Mat img;CvMat cvMatImg = img;IplImage iplImage = img;2.IpIImage 类型和 CvMat 类型转换为 cv::Mat 类型IplImage* iplImg = cvLoadImage("a.jpg");cv::Mat img(iplImg, true);。
opencv中cvarrcvmatiplimagecvmat和cvinputarray的相关总结

opencv中cvarrcvmatiplimagecvmat和cvinputarray的相关总结在OpenCV中,有几种不同的数据类型可以用来存储图像和矩阵数据。
这些数据类型包括`cv::Mat`、`cv::InputArray`和`cv::_InputArray`。
1. `cv::Mat`:- `cv::Mat`是OpenCV中最常用的数据类型之一,它用于存储图像和矩阵数据。
- `cv::Mat`是一个N维数组,可以包含任意类型的元素。
- `cv::Mat`是一个自包含对象,包含了数据指针、数据尺寸和其他元数据。
- `cv::Mat`提供了丰富的成员函数,用于对图像和矩阵进行操作和处理。
2. `cv::InputArray`:- `cv::InputArray`是OpenCV中的一个输入参数类型,用于接受不同的数据类型作为输入。
- `cv::InputArray`可以接受各种类型的数据作为输入,包括`cv::Mat`、`cv::Mat_`、`cv::UMat`、`cv::STDVECTOR`和原始数组。
- `cv::InputArray`是一个轻量级对象,通常只传递给函数作为输入参数,而不会对其进行修改或处理。
- `cv::InputArray`提供了一些方法,用于将输入数据转换为`cv::Mat`对象,以便在算法中使用。
3. `cv::_InputArray`:- `cv::_InputArray`是`cv::InputArray`的基类,用于在OpenCV内部处理输入参数。
- `cv::_InputArray`提供了一些方法,用于在OpenCV内部将不同类型的输入参数转换为`cv::Mat`对象。
- `cv::_InputArray`还提供了一些辅助方法,用于获取或设置输入参数的相关属性。
总结:- `cv::Mat`是OpenCV中用于存储图像和矩阵数据的最常用数据类型。
- `cv::InputArray`是一个接受不同数据类型作为输入的参数类型,通常用于函数参数。
CV::Mat介绍

CV::Mat介绍cv::Mat是OpenCV2和OpenCV3中基本的数据类型,在cv::Mat类中,关于cv::Mat的定义和初始化有多种不同的形式,这⾥,将对其进⾏详尽的总结和介绍。
⼀、⽆数据拷贝的cv::Mat的定义和初始化1、默认形式cv::Mat m;2、指定类型和⼤⼩(⾏列)的⼆维数组cv::Mat m(int rows, int cols, int type);3、有初始化值的指定类型和⼤⼩(⾏列)的⼆维数组cv::Mat m(int rows, int cols, int type, const Scalar& s);4、使⽤预先存在数据定义的指定类型和⼤⼩(⾏列)的⼆维数组cv::Mat m(int rows, int cols, int type, void* data, size_t step = AUTO_STEP);5、指定⼤⼩(size)和类型的⼆维数组cv::Mat m(cv::Size sz, int type, const Scalar& s);6、使⽤预先存在的数据定义的指定⼤⼩(size)和类型的⼆维数组cv::Mat m(cv::Size sz, int type, void* data, size_t step = AUTO_STEP);7、指定类型的多维数组cv::Mat m(int ndims, const int* sizes, int type);8、有初始化值的指定类型多维数组cv::Mat m(int ndims, const int* sizes, int type, const Scalar& s);9、使⽤预先存在的数据定义的指定类型的多维数组cv::Mat m(int ndims, const int* sizes, int type, void* data, size_t step = AUTO_STEP);⼆、从其他cv::Mat进⾏数据拷贝的定义和初始化1、拷贝构造形式cv::Mat m(const cv::Mat& mat);2、指定⾏列范围的拷贝构造cv::Mat m(const cv::Mat& mat, const cv::Range& rows, const cv::Range& cols);3、指定ROI的拷贝构造cv::Mat m(const cv::Mat& mat, const cv::Rect& roi);4、使⽤多维数组中指定范围内的数据的拷贝构造cv::Mat(const cv::Mat& mat, const cv::Range* ranges);三、使⽤OpenCV中的模板进⾏定义和初始化1、使⽤cv::Vec定义相同类型、⼤⼩为n的⼀维数组cv::Mat m(const cv::Vec<T, n>& vec, bool = copyData = true);2、使⽤cv::Matx定义相同类型、⼤⼩为mxn的⼆维数组cv::Mat(const cv::Matx<T, m, n>& vec, bool copyData = true);3、使⽤STL vector定义相同类型的⼀维数组cv::Mat(const std::vector<T>& vec, bool copyData = true);四、直接使⽤静态函数创建cv::Mat1、使⽤zeros()函数定义指定⼤⼩和类型的cv::Mat(全为0)cv::Mat m = cv::Mat::zeros(int rows, int cols, int type);2、使⽤ones()函数定义指定⼤⼩和类型的cv::Mat(全为0)cv::Mat m = cv::Mat::ones(int rows, int cols, int type);3、使⽤eye()函数定义指定⼤⼩和类型的cv::Mat(恒等矩阵)cv::Mat m = cv::Mat::eye(int rows, int cols, int type);五. IplImage与CV::Mat之间的转换A. 将IplImage-----> Mat类型Mat::Mat(const IplImage* img, bool copyData=false);默认情况下,新的Mat类型与原来的IplImage类型共享图像数据,转换只是创建⼀个Mat矩阵头。
OPENCV对于Mat的理解和操作
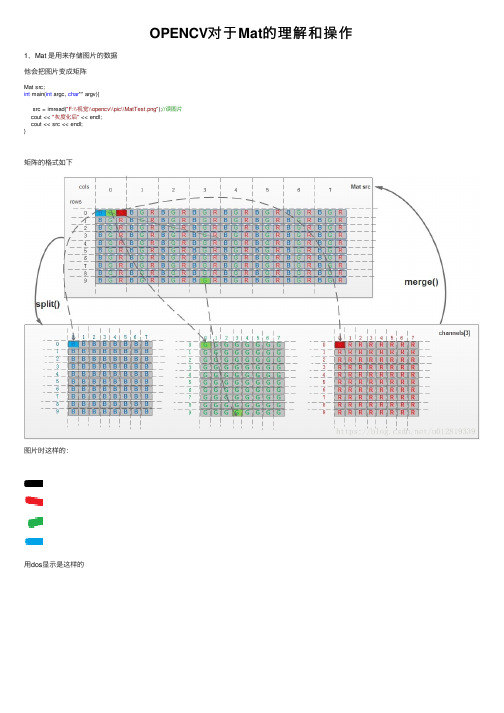
OPENCV对于Mat的理解和操作1,Mat 是⽤来存储图⽚的数据他会把图⽚变成矩阵Mat src;int main(int argc, char** argv){src = imread("F:\\视觉\\opencv\\pic\\MatTest.png");//读图⽚cout << "灰度化后" << endl;cout << src << endl;}矩阵的格式如下图⽚时这样的:⽤dos显⽰是这样的灰度化之后是这样的怎么样是不是看上去有点熟悉没错,灰度化后直接把每个位置的像素的值,组成⼀个矩阵,⽽没有灰度化时是如图⼀所⽰。
2,Mat获取某⼀点坐标的值cout << (int)src.ptr<uchar>(1)[1] << endl;锐化的案例:int cols = (src.cols-1)*src.channels();int rows = src.rows;int channels = src.channels();int offsetx = src.channels();Mat dst1 = Mat::zeros(src.size(), src.type());for (int row = 1; row < (rows - 1); row++){const uchar* previous = src.ptr<uchar>(row - 1);const uchar* current = src.ptr<uchar>(row);const uchar* next = src.ptr<uchar>(row + 1);uchar* output = dst1.ptr<uchar>(row);for (int col = offsetx; col < cols; col++) {output[col] = saturate_cast<uchar>(5 * current[col] - (current[col - offsetx] + current[col + offsetx] + previous[col] + next[col])); }}imshow("锐化转化后", dst1);src.ptr<uchar>(row);是获取第⼏⾏的指针src.ptr<uchar>(1)[1];默认是char类型,所以要转成int类型输出才能看得到,不然会输出Hex码表对于的字符信息。
cvmat 引用计数-概述说明以及解释

cvmat 引用计数-概述说明以及解释1.引言1.1 概述概述部分:OpenCV中的cv::Mat是一个重要的数据结构,用于存储图像数据。
在处理图像数据时,通常需要对图像进行复制、裁剪、缩放等操作,这可能会导致内存的频繁分配和释放,影响程序的性能。
为了解决这个问题,OpenCV引入了引用计数机制,即对cv::Mat的引用计数进行管理,避免不必要的内存操作,提高程序效率。
本文将介绍cv::Mat的引用计数概念,讨论引用计数的作用以及在实际应用中的优势。
着重强调了cv::Mat引用计数在图像处理中的重要性,希望读者能够深入了解并应用这一功能,提升图像处理的效率和质量。
1.2 文章结构本文主要分为引言、正文和结论三部分。
首先,引言部分将概述文章的主题,并介绍文章的结构和目的。
接着,正文部分将详细讨论cv::Mat 的概念、引用计数的概念以及cv::Mat引用计数的作用。
最后,结论部分将总结cv::Mat引用计数的重要性,并探讨应用cv::Mat引用计数的优势和未来发展的展望。
整个文章将围绕着cv::Mat引用计数展开讨论,旨在帮助读者更深入地了解这一概念的重要性和应用领域。
1.3 目的:本文的主要目的是探讨cv::Mat引用计数的概念和作用。
通过深入了解cv::Mat引用计数的机制,我们可以更好地理解在OpenCV中对图像数据进行操作时的内存管理方式。
此外,我们还将分析cv::Mat引用计数在图像处理和机器学习领域中的应用优势,探讨其对算法性能和效率的影响。
最终,我们将展望cv::Mat引用计数在未来发展中的潜力,以及可能带来的创新和改进。
通过本文的讨论,读者可以更全面地了解和应用cv::Mat 引用计数,从而提高图像处理和机器学习任务的效率和效果。
2.正文2.1 什么是cv::Mat在OpenCV中,cv::Mat是表示图像的基本数据结构。
它是一个N维矩阵类,用于存储图像像素的数据以及相关的元数据。
OPENCV的MAT类详解
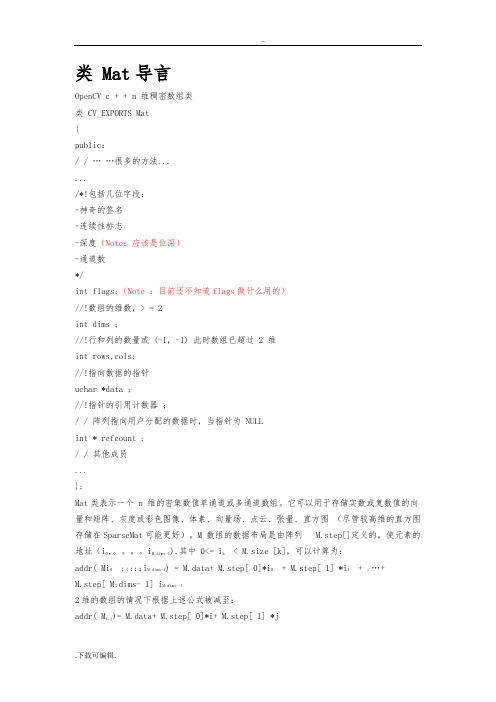
类 Mat导言OpenCV c + + n 维稠密数组类类 CV_EXPORTS Mat{public:/ / … …很多的方法....../*!包括几位字段:-神奇的签名-连续性标志-深度(Note:应该是位深)-通道数*/int flags;(Note :目前还不知道flags做什么用的)//!数组的维数,> = 2int dims ;//!行和列的数量或 (-1,-1) 此时数组已超过 2 维int rows,cols;//!指向数据的指针uchar *data ;//!指针的引用计数器;/ / 阵列指向用户分配的数据时,当指针为 NULLint * refcount ;/ / 其他成员...};Mat类表示一个 n 维的密集数值单通道或多通道数组。
它可以用于存储实数或复数值的向量和矩阵、灰度或彩色图像、体素、向量场、点云、张量、直方图(尽管较高维的直方图存储在SparseMat可能更好)。
M 数组的数据布局是由阵列 M.step[]定义的,使元素的地址(i0,。
i M.dims-1),其中 0<= i k< M.size [k],可以计算为:addr( Mi0;:::;i M.dims-1) = M.data+ M.step[ 0]*i0+ M.step[ 1] *i1+ .…+M.step[ M:dims- 1] i M:dims- 12维的数组的情况下根据上述公式被减至:addr( M i,j)= M.data+ M.step[ 0]*i+ M.step[ 1] *j请注意,M.step[i] > =M.step[i+1] (事实上,M.step[i] > =M.step[i+1]*M.size[i+1])。
这意味着2维矩阵是按行存储的,3 维矩阵是由平面存储,以此类推。
M.step[M.dims-1] 是最小的而且总是等于元素大小M.elemSize()。
opencv mat构造

OpenCV Mat构造简介OpenCV是一个开源计算机视觉库,其中的Mat类是其核心数据结构之一。
Mat类用于存储和操作图像像素数据,是OpenCV中最常用的数据类型之一。
本文将详细介绍OpenCV Mat的构造方法和使用技巧,包括创建空白图像、从已有数据创建图像、设置和获取像素值、图像拷贝等。
创建空白图像在OpenCV中创建空白图像可以使用cv::Mat类的构造函数。
以下是几种常见的创建空白图像的方法:1. 使用默认构造函数cv::Mat image;上述代码将创建一个空白图像,它没有分配内存空间,并且没有任何初始化。
在使用这种方式创建的图像之前,需要先为其分配内存或者将其与其他已有的Mat对象关联起来。
2. 指定尺寸和类型cv::Mat image(height, width, type);上述代码将创建一个指定尺寸和类型的空白图像。
其中height表示图像高度,width表示图像宽度,type表示图像类型。
常见的类型有: - CV_8UC1: 单通道8位无符号整数(灰度图) - CV_8UC3: 三通道8位无符号整数(彩色图) -CV_32FC1: 单通道32位浮点数3. 使用Mat::create函数cv::Mat image;image.create(height, width, type);上述代码将创建一个空白图像,并为其分配内存空间。
这种方式相比于直接使用构造函数,更加灵活,可以在运行时动态地创建图像。
从已有数据创建图像除了创建空白图像,我们还可以从已有的数据中创建图像。
以下是几种常见的从已有数据创建图像的方法:1. 使用指针和尺寸cv::Mat image(height, width, type, data);上述代码将使用指针data指向的数据创建一个指定尺寸和类型的图像。
这种方式适用于已有数据存储在连续内存块中的情况。
2. 使用cv::Mat构造函数和已有数据cv::Mat image(rows, cols, type, data, step);上述代码将使用指针data指向的数据以及步长step来创建一个指定尺寸和类型的图像。
opencv mat类运算

opencv mat类运算OpenCVMat类是一个非常重要的数据结构,可以表示图像、矩阵和向量等,在计算机视觉和图形学领域广泛应用。
本文将介绍Mat类的基本操作,包括创建、访问、赋值、运算等。
1. 创建Mat对象首先,我们可以通过以下两种方式创建一个Mat对象:(1)使用构造函数:Mat(int rows, int cols, int type);(2)使用静态方法:Mat::zeros(int rows, int cols, int type);其中,rows和cols表示矩阵的行数和列数,type表示数据类型和通道数,常用的有CV_8UC1、CV_8UC3、CV_32FC1等。
2. 访问Mat元素访问Mat对象的元素可以使用at()方法或者指针操作符[],例如:Mat img = imread('image.jpg', CV_LOAD_IMAGE_GRAYSCALE); uchar pixel = img.at<uchar>(i, j);或者:uchar* data = img.ptr<uchar>(i);uchar pixel = data[j];3. 赋值操作Mat对象之间可以进行赋值操作,例如:Mat img = imread('image.jpg', CV_LOAD_IMAGE_GRAYSCALE);Mat img2 = img.clone();4. 运算操作Mat对象之间可以进行加、减、乘、除等运算,例如:Mat img1 = imread('image1.jpg', CV_LOAD_IMAGE_GRAYSCALE); Mat img2 = imread('image2.jpg', CV_LOAD_IMAGE_GRAYSCALE); Mat img_add = img1 + img2;Mat img_sub = img1 - img2;Mat img_mul = img1.mul(img2);Mat img_div = img1 / img2;除此之外,还可以进行矩阵转置、矩阵相乘、矩阵求逆、矩阵求特征值等高级运算。
OPENCV库函数使用说明
OPENCV库函数使用说明
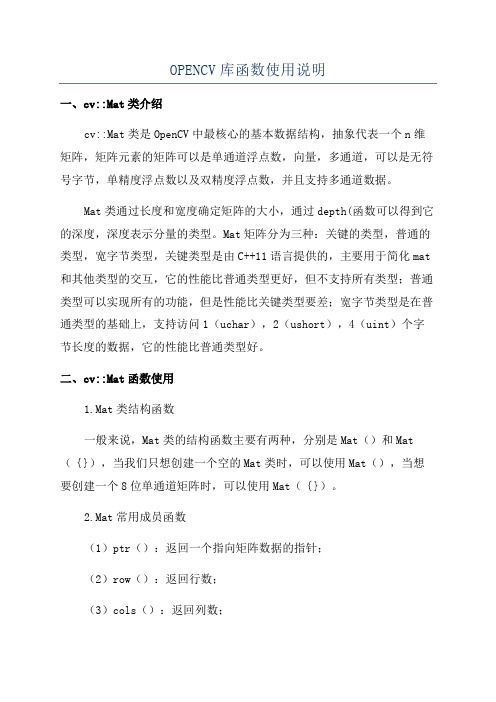
一、cv::Mat类介绍
cv::Mat类是OpenCV中最核心的基本数据结构,抽象代表一个n维矩阵,矩阵元素的矩阵可以是单通道浮点数,向量,多通道,可以是无符号字节,单精度浮点数以及双精度浮点数,并且支持多通道数据。
Mat类通过长度和宽度确定矩阵的大小,通过depth(函数可以得到它的深度,深度表示分量的类型。
Mat矩阵分为三种:关键的类型,普通的类型,宽字节类型,关键类型是由C++11语言提供的,主要用于简化mat 和其他类型的交互,它的性能比普通类型更好,但不支持所有类型;普通类型可以实现所有的功能,但是性能比关键类型要差;宽字节类型是在普通类型的基础上,支持访问1(uchar),2(ushort),4(uint)个字节长度的数据,它的性能比普通类型好。
二、cv::Mat函数使用
1.Mat类结构函数
一般来说,Mat类的结构函数主要有两种,分别是Mat()和Mat ({}),当我们只想创建一个空的Mat类时,可以使用Mat(),当想要创建一个8位单通道矩阵时,可以使用Mat({})。
2.Mat常用成员函数
(1)ptr():返回一个指向矩阵数据的指针;
(2)row():返回行数;
(3)cols():返回列数;。
opencv mat类运算

opencv mat类运算OpenCVMat类是OpenCV中最基本的数据类型之一。
它代表一个多维数组,可以用于存储图像、矩阵、点云等数据。
在实际应用中,我们经常需要对Mat对象进行各种运算,本文将介绍一些常用的Mat 类运算。
1. Mat对象的创建和初始化在使用Mat对象之前,我们需要创建它并对其进行初始化。
创建Mat对象的方法如下:Mat image;//创建一个空的Mat对象Mat image(rows,cols,type);//创建指定大小和类型的Mat对象其中,rows表示矩阵的行数,cols表示矩阵的列数,type表示矩阵的数据类型,常用的类型有CV_8UC1(8位无符号单通道)、CV_8UC3(8位无符号三通道)、CV_32FC1(32位浮点单通道)等。
Mat对象的初始化可以通过赋值、拷贝、从文件读取等方式进行。
2. Mat对象的运算Mat对象支持各种数学运算,包括加、减、乘、除、逻辑运算等。
下面以加法运算为例,介绍Mat对象的运算。
Mat a(rows,cols,CV_8UC1,Scalar(1));//创建一个大小为rows*cols,类型为CV_8UC1,值为1的Mat对象Mat b(rows,cols,CV_8UC1,Scalar(2));//创建一个大小为rows*cols,类型为CV_8UC1,值为2的Mat对象Mat result = a + b;//将a和b相加,结果保存在result中在进行运算时,需要注意Mat对象的大小和数据类型必须相同,否则会导致运算失败。
此外,Mat对象的运算速度较慢,应尽量避免在循环中使用。
3. Mat对象的转换Mat对象可以进行类型转换和通道分离,以便在不同的应用场景中使用。
下面以类型转换为例,介绍Mat对象的转换。
Mat a(rows,cols,CV_8UC1,Scalar(1));//创建一个大小为rows*cols,类型为CV_8UC1,值为1的Mat对象Mat b;//创建一个空的Mat对象a.convertTo(b, CV_32FC1);//将a转换为CV_32FC1类型,结果保存在b中在进行类型转换时,需要注意目标类型应该能够容纳源类型的值,否则会丢失精度。
OpenCV中Mat总结

OpenCV中Mat总结⼀、数字图像存储概述数字图像存储时,我们存储的是图像每个像素点的数值,对应的是⼀个数字矩阵。
⼆、Mat的存储1、OpenCV1基于C接⼝定义的图像存储格式IplImage*,直接暴露内存,如果忘记释放内存,就会造成内存泄漏。
2、从OpenCV2开始,开始使⽤Mat类存储图像,具有以下优势:(1)图像的内存分配和释放由Mat类⾃动管理(2)Mat类由两部分数据组成:矩阵头(包含矩阵尺⼨、存储⽅法、存储地址等)和⼀个指向存储所有像素值的矩阵(根据所选存储⽅法的不同,矩阵可以是不同的维数)的指针。
Mat在进⾏赋值和拷贝时,只复制矩阵头,⽽不复制矩阵,提⾼效率。
如果矩阵属于多个Mat对象,则通过引⽤计数来判断,当最后⼀个使⽤它的对象,则负责释放矩阵。
(3)可以使⽤clone和copyTo函数,不仅复制矩阵头还复制矩阵。
三、Mat创建1、使⽤Mat构造函数Mat test(2,2,CV_8UC3,Scalar(0,0,255));2、使⽤Mat构造函数2int sizes[3] = {2,2,2};Mat test(3,sizes,CV_8UC3,Scalar::all(0));3、为已存在的IplImage指针创建信息头IplImage* img = cvLoadImage("1.jpg",1);Mat test(img);4、利⽤create函数Mat test;test.create(4,4,CV_8UC2);5、采⽤Matlab形式的初始化⽅式(1)Mat me = Mat::eye(4,4,CV_64F);(2)Mat mo = Mat::ones(2,2,CV_32F);(3)Mat mz = Mat::zeros(3,3,CV_8UC1);注:元素类型,即CV_[位数][带符号与否][类型前缀]C[通道数]四、Mat中相关成员的意义1、dataMat对象中的⼀个指针,指向存放矩阵数据的内存(uchar* data)2、dims矩阵的维度,3*4的矩阵维度为2维,3*4*5的矩阵维度为3维3、channels矩阵通道,矩阵中的每⼀个矩阵元素拥有的值的个数,⽐如说 3 * 4 矩阵中⼀共 12 个元素,如果每个元素有三个值,那么就说这个矩阵是 3通道的,即 channels = 3。
python opencv的mat结构及其应用场景

python opencv的mat结构及其应用场景
在Python的OpenCV库中,Mat是一个核心类,用于表示图像和矩阵。
Mat对象可以看作是一个多维数组,能够保存实数或复数的向量、矩阵、灰度或彩色图像、立体元素、点云、张量以及直方图。
Mat对象可以分为两个部分:矩阵头和指向像素数据的矩阵指针。
矩阵头包括数字图像的矩阵尺寸、存储方法、存储地址和引用次数等,矩阵头的大小是一个常数,不会随着图像的大小而改变,但是保存图像像素数据的矩阵则会随着图像的大小而改变,通常数据量会很大,比矩阵头大几个数量级。
Mat对象的应用场景包括但不限于以下几个方面:
1.图像处理和计算机视觉任务:这是Mat对象最常用的场景之一。
通过使用Mat对象,可以对图像进行各种
操作,如读取、显示、保存、裁剪、旋转、缩放、滤波、边缘检测、特征提取等。
2.机器学习和深度学习任务:Mat对象可以用于存储和处理数据,包括训练和测试数据集。
通过使用OpenCV
库中的各种算法和函数,可以对Mat对象进行预处理、特征提取和模型训练等操作。
3.图像分析和图像识别任务:通过使用Mat对象,可以对图像进行分析和识别,如人脸检测、目标跟踪、手
势识别等。
4.图像生成和渲染:使用Mat对象可以生成和处理图像,如制作动画、生成艺术效果等。
总之,Mat对象是OpenCV库中的核心类之一,其应用场景非常广泛,可用于图像处理、计算机视觉、机器学习、深度学习等领域。
opencv mat 运算符 操作 详解
在 OpenCV 中,cv::Mat类型是表示矩阵(图像)的核心数据结构。
它支持各种矩阵运算和操作,可以进行像素级别的图像处理和计算。
以下是一些常见的cv::Mat运算符和操作的详解:
创建cv::Mat对象:
1.创建空白矩阵:
2.通过数据创建矩阵:
3.复制矩阵:
基本运算:
1.矩阵加法:
2.矩阵减法:
3.矩阵乘法:
4.标量乘法:
逐元素运算:
1.逐元素加法:
2.逐元素减法:
3.逐元素乘法:
4.逐元素除法:
转置和翻转:
1.矩阵转置:
2.水平翻转:
3.垂直翻转:
其他操作:
1.矩阵元素访问:
2.改变矩阵大小:
3.提取子矩阵:
4.通道拆分与合并:
这些是一些常见的cv::Mat运算符和操作的示例。
OpenCV 提供了丰富的功能,允许进行更复杂的图像处理和计算。
具体的操作和运算可以根据具体需求进行查阅OpenCV 文档。
opencv mat类元素赋值
标题:OpenCV中Mat类元素赋值的操作一、介绍OpenCV是一个开源的计算机视觉库,提供了丰富的图像处理功能,Mat类是OpenCV中使用最广泛的类之一,它可以用来存储图像数据,进行图像处理和运算。
在使用OpenCV时,对于Mat类的元素赋值操作是非常常见的,本文将介绍OpenCV中Mat类元素赋值的相关操作和技巧。
二、Mat类简介1. Mat类是OpenCV中用于存储图像数据的类,它是一个多维数组,可以存储图像的像素值。
2. Mat类可以存储单通道灰度图像、三通道彩色图像,以及其他类型的图像数据。
三、Mat元素赋值的基本操作1. 使用at方法对Mat元素进行赋值Mat img = imread("image.jpg");img.at<Vec3b>(i, j)[0] = 255; //对(i, j)位置的蓝色通道赋值为2552. 使用指针操作对Mat元素进行赋值Mat img = imread("image.jpg");Vec3b* pixel = img.ptr<Vec3b>(i); //获取第i行的像素指针pixel[j][0] = 255; //对第i行第j列的像素的蓝色通道赋值为255四、Mat元素赋值的高级操作1. 使用循环对Mat元素进行批量赋值Mat img(100, 100, CV_8UC3);for (int i = 0; i < img.rows; i++) {for (int j = 0; j < img.cols; j++) {img.at<Vec3b>(i, j) = Vec3b(0, 0, 255); //给整个图像赋值为蓝色}}2. 使用setTo方法对Mat元素进行批量赋值Mat img(100, 100, CV_8UC3);img.setTo(Vec3b(0, 0, 255)); //给整个图像赋值为蓝色五、Mat元素赋值的注意事项1. 确保元素位置的合法性在对Mat元素进行赋值时,需要确保元素的位置合法,避免越界访问导致内存访问错误。
opencv mat 编码

opencv mat 编码OpenCV的mat类型是一种矩阵类,用于存储和处理图像数据。
它可以存储单通道或多通道的图像数据,以及其他类型的数据,如深度图像、点云等。
在OpenCV中,mat类型可以通过以下方式进行编码:1. 颜色编码:Mat类型的图像可以使用不同的颜色编码进行表示,例如RGB、BGR、灰度等。
- RGB编码:图像的每个像素由3个通道组成,表示红、绿、蓝三个颜色分量。
可以使用以下代码创建一个RGB编码的Mat对象:```cppcv::Mat image(height, width, CV_8UC3);```- BGR编码:与RGB编码类似,但通道的顺序不同,表示蓝、绿、红三个颜色分量。
可以使用以下代码创建一个BGR编码的Mat对象:```cppcv::Mat image(height, width, CV_8UC3);cv::cvtColor(image, image, cv::COLOR_RGB2BGR);```- 灰度编码:图像的每个像素只有一个通道,表示灰度。
可以使用以下代码创建一个灰度编码的Mat对象:```cppcv::Mat image(height, width, CV_8UC1);```2. 数据类型编码:Mat类型的图像数据可以使用不同的数据类型进行编码,例如8位无符号整数(CV_8U)、32位浮点数(CV_32F)等。
- 8位无符号整数编码:可以使用以下代码创建一个8位无符号整数编码的Mat对象:```cppcv::Mat image(height, width, CV_8UC3);```- 32位浮点数编码:可以使用以下代码创建一个32位浮点数编码的Mat对象:```cppcv::Mat image(height, width, CV_32FC1);```需要注意的是,编码的方式根据具体的需求和图像数据的特点进行选择,不同的编码方式可能会影响图像处理的结果和效率。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
类Mat导言OpenCV c + + n 维稠密数组类类CV_EXPORTS Mat{public:/ / … …很多的方法....../*!包括几位字段:-神奇的签名-连续性标志-深度(Note:应该是位深)-通道数*/int flags;(Note :目前还不知道flags做什么用的)//!数组的维数,> = 2int dims ;//!行和列的数量或(-1,-1) 此时数组已超过2 维int rows,cols;//!指向数据的指针uchar *data ;//!指针的引用计数器;/ / 阵列指向用户分配的数据时,当指针为NULLint * refcount ;/ / 其他成员...};Mat类表示一个n 维的密集数值单通道或多通道数组。
它可以用于存储实数或复数值的向量和矩阵、灰度或彩色图像、体素、向量场、点云、张量、直方图(尽管较高维的直方图存储在SparseMat可能更好)。
M 数组的数据布局是由阵列M.step[]定义的,使元素的地址(i0,。
i M.dims-1),其中0<= i k < M.size [k],可以计算为:addr( Mi0 ;:::;i M.dims-1) = M.data+ M.step[ 0]*i0 + M.step[ 1] *i1+ .…+ M.step[ M:dims- 1]i M:dims- 12维的数组的情况下根据上述公式被减至:addr( M i,j)= M.data+ M.step[ 0]*i+ M.step[ 1] *j请注意,M.step[i] > =M.step[i+1] (事实上,M.step[i] > =M.step[i+1]*M.size[i+1])。
这意味着2维矩阵是按行存储的,3 维矩阵是由平面存储,以此类推。
M.step[M.dims-1] 是最小的而且总是等于元素大小M.elemSize()。
因此,Mat中的数据布局完全兼容OpenCV 1.x 中CvMat、IplImage、CvMatND类型。
它也和标准工具包和SDK,如Numpy(ndarray),Win32(独立设备位图)等主流的密集数组类型相兼容,也就是说,与任何使用步进(或步长)来计算像素位置的阵列相兼容。
由于这种兼容性,使用户分配的数据创建Mat头以及用OpenCV函数实时处理该头成为可能。
有很多不同的方法,创建一个Mat的对象。
下面列出了最常见的选项:使用create(nrows,ncols,type)方法或类似的Mat(nrows,ncols,type [,fillValue])构造函数。
一个新的指定了大小和类型的数组被分配。
type和cvCreateMat 方法中的type 参数具有相同的含义。
例如,CV_8UC1 是指一个8 位单通道阵列,CV_32FC2 指 2 通道(复)浮点阵列,以此类推。
//创建一个用1+3j填充的7 x 7 复矩阵。
Mat M(7,7,CV_32FC2,Scalar(1,3)) ;/ /现在将M转换为100 x 60的CV_8UC(15)的矩阵。
/ / 旧内容将会被释放M.create(100,60,CV_8UC(15)) ;这一章导言中指出,当当前的数组与指定的数组的形状或类型create() 分配唯一的新数组时的形状或类型。
创建多维数组:/ / 创建100 x 100 x 100 8 位数组int sz[] = {100, 100, 100};Mat. bigCube (3,sz,CV_8U,Scalar::all(0)) ;它将维度数(= 1)传递给Mat的构造函数,但列数设置为1时,创建数组将是2 维的。
因此,Mat::dims 始终是>=2的(该数组为空时,也可以是0)。
使用的复制构造函数或赋值运算符可以是一个数组或右侧的表达式(请参阅下图)。
正像在导言中指出的,数组赋值运算复杂度是O(1)因为当你需要它的时候,它仅复制头和增加引用计数。
Mat::clone() 方法可用于获取全(深)的副本数组。
为另一个数组的一部分构建头。
它可以是单个行、单个列,几个行,几个列,矩形区域(代数中称为较小值)的数组或对角线。
这种操作也是复杂度为O(1),因为,新头引用相同的数据。
实际上,您可以使用此特性修改该数组的一部分例如:/ /第5行,乘以3,加到第3 行,M.row(3) = M.row(3) + M.row (5) * 3 ;/ / 现在将第7列复制到第1列/ / M.col(1) = M.col(7) ;/ / 这个不能实现。
Mat M1= M.col(1) ;M.col(7).copyTo(M1) ;/ / 创建一种新的320 x 240 图像Mat img(Size(320,240),CV_8UC3) ;/ / 选择ROI(region of interest)Mat roi(img,Rect(10,10,100,100)) ;/ / 填充(0,255,0)的ROI (这是RGB 空间中的绿色);/ / 320 x 240 原始图像将被修改。
roi = Scalar(0,255,0) ;由于额外的datastart 和dataend 的成员,它们使得用locateROI() 计算子数组在主容器数组中的相对的位置成为可能:Mat A = Mat::eye ( 10, 10, CV_32S);/ / 提取A 的1 (含)到3 (不包含)列。
Mat B = A(Range::all(),Range(1,3));/ / 提取B 的5 (含)到9 (不包含)行。
/ /即C ~ A(Range(5,9),Range (1,3))Mat C = B(Range(5,9),Range::all()) ;Size size;Point ofs;C.locateROI (size,ofs);/ / size将变为(width= 10,height= 10),ofs会变为(x = 1,y = 5)考虑到整个矩阵,如果您需要深层副本,使用子矩阵的sclone() 方法的提取。
为用户分配数据创建矩阵头。
有利于执行下列操作:1. 使用OpenCV处理"外来"的数据(例如,当您执行DirectShow *filter 或gstreamer的pro-cessing 模块,等等)。
例如:void process_video_frame (const unsignedchar * pixels,int width,int height,int step){Mat img (width,height, CV_8UC3,pixels,step);GaussianBlur (img,img ,Size(7,7),1.5,1.5);}2.快速初始化小矩阵和/或获取超快的元素的访问。
double m[3] [3] = {{a,b,c},{d,e,f} {g, h, i}}};Mat M = Mat(3,3,CV_64F,m).inv() ;本例中用户分配数据的一些很常见情况是从CvMat 和IplImage 转换到Mat。
为达到此目的,有些特殊的构造函数以指向CvMat 或IplImage 和flag可选参数指示是否数据复制。
从Mat到CvMat 或IplImage 的后台转换是通过类型转换运算符Mat::operator CvMat() const 和Mat::operator IplImage()实现的。
operators不要复制数据。
IplImage * img = cvLoadImage("greatwave.jpg",1);Mat mtx(img) ;/ / IplImage *-> MatCvMat oldmat = mtx ;/ / Mat-> CvMatCV_Assert (oldmat.cols = = img-> width&& oldmat.rows = = img-> height &&oldmat.data.ptr = = (uchar *) img->imageData && oldmat.step = = img-> widthStep);使用MATLAB 样式数组初始值设定项zeros()、ones()、eye(),例如:/ / 创建具双精度标识矩阵并将其添加到M。
M + = Mat::eye (M.rows,M.cols,CV_64F);使用逗号分隔的初始值设定项:/ / 创建3 x 3 双精度恒等矩阵Mat M = (Mat_ <double> (3,3) <<1,0,0,0,1,0,0,0,1);使用此方法,您首先调用具有适当的参数的Mat_类构造函数,然后只要把<<运算符后面的值用逗号分隔,这些值可以是常量、变量、表达式,等等。
此外请注意所需的额外的圆括号((Mat_<double> (3,3)<< 1,0,0,0,1,0,0,0,1))以免出现编译错误。
数组一旦创建起来,它可以自动通过引用计数的机制被管理。
如果数组头是在用户分配的数据的基础上构建的,您应该自己处理这些数据。
当没有指向它的引用时,数组中的数据将被释放。
如果在数组的析构函被调用之前要释放一个由矩阵头指向的数据,请使用Mat::release()。
掌握Array类的另一个重要的环节是元素的访问。
本手册已经描述了如何计算每个数组元素的地址。
通常情况下,不需要在代码中直接使用的公式。
如果你知道数组元素类型(它可以使用Mat::type() 方法检索得到),您可以用以下方式访问二维数组的元素M ij:M.at <double>(i,j) + = 1.f ;假定M 一个双精度浮点型数组。
有几个变体的不同方法来针对不同的维度数进行处理。
如果您要处理整行的二维数组,最有效的方式是获取该行的头指针然后只需使用普通的C 运算符[]:/ / 正矩阵元素之和计算/ / (假定M 是一个双精度矩阵)double sum = 0;for (int i = 0 ;i < M.rows ; i + +){const double *Mi = M.ptr <double> (i) ;for (int j = 0; j < M.cols ; j + +)sum + = std::max(Mi [j],0.);}以上的操作中,某些操作实际上不依赖该数组的形状。
他们只是一个接一个(或多个具有相同的坐标的多个数组中的元素,例如,数组相加)地处理数组元素。