机械原理课程设计-牛头刨床凸轮机构
《机械原理》课程设计_牛头刨床
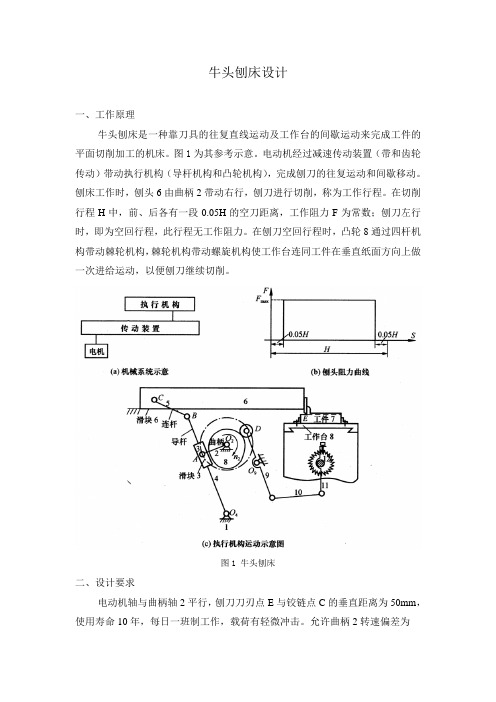
牛头刨床设计一、工作原理牛头刨床是一种靠刀具的往复直线运动及工作台的间歇运动来完成工件的平面切削加工的机床。
图1为其参考示意。
电动机经过减速传动装置(带和齿轮传动)带动执行机构(导杆机构和凸轮机构),完成刨刀的往复运动和间歇移动。
刨床工作时,刨头6由曲柄2带动右行,刨刀进行切削,称为工作行程。
在切削行程H中,前、后各有一段0.05H的空刀距离,工作阻力F为常数;刨刀左行时,即为空回行程,此行程无工作阻力。
在刨刀空回行程时,凸轮8通过四杆机构带动棘轮机构,棘轮机构带动螺旋机构使工作台连同工件在垂直纸面方向上做一次进给运动,以便刨刀继续切削。
图1 牛头刨床二、设计要求电动机轴与曲柄轴2平行,刨刀刀刃点E与铰链点C的垂直距离为50mm,使用寿命10年,每日一班制工作,载荷有轻微冲击。
允许曲柄2转速偏差为土5%。
要求导杆机构的最大压力角应为最小值;凸轮机构的最大压力角应在许用值[α]之内,摆动从动件9的升、回程运动规律均为等加速、等减速运动。
执行构件的传动效率按0.95计算,系统有过载保护。
按小批量生产规模设计。
三、设计数据表1 设计数据四、设计内容及工作量(1)根据牛头刨床的工作原理,拟定2~3个其他形式的执行机构(连杆机构),并对这些机构进行分析对比。
(2)根据给定的数据确定机构的运动尺寸。
要求用图解法设计,并将设计结果和步骤写在设计说明书中。
(3)导杆机构的运动分析。
将导杆机构放在直角坐标系下,建立数学模型。
(4)凸轮机构设计。
根据给定的已知参数,确定凸轮的基本尺寸(基圆半径r o、机架l o2o9和滚子半径r r)和实际轮廓,并将运算结果写在说明书中(可选)。
(5)编写设计计算说明书。
机械原理课程设计——牛头刨床.
一:课程设计题目、内容及其目的课题:牛头刨床内容1.对机构进行运动分析已知:曲柄每分钟转数错误!未找到引用源。
,各构件尺寸及质心位置。
作机构1~2个位置的速度多边形和加速度多边形,作滑块的运动线图,以上内容与后面动态静力分析一起画在1号图纸上。
2.对机构进行动态静力分析已知:各构件的重量G(曲柄1、滑块2、和连杆5的重量都可以忽略不计),导杆3的转动惯量错误!未找到引用源。
及切削力错误!未找到引用源。
变化规律如下图。
确定构件一个位置的各运动副反力及应加于曲柄上的平衡力矩。
3、用UG进行模拟运动仿真校核机构运动分析和动态静力分析的结果4、电动机功率的确定与型号的选择5、齿轮减速机构设计目的:1:学会机械运动见图设计的步骤和方法;2:巩固所学的理论知识,掌握机构分析与综合的基本方法;3:培养学生使用技术资料,计算作图及分析与综合能力;4:培养学生进行机械创新的能力。
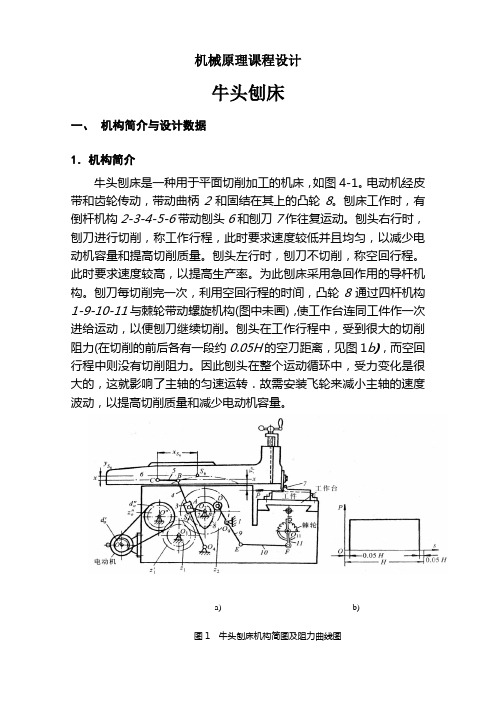
二:牛头刨床简介和机构的要求1:牛头刨床简介牛头刨床是一种用于平面切削加工的机床,如图1。
电动机经皮带和齿轮传动,经过减速机构减速从而带动曲柄1。
刨床工作时,由导杆3 经过连杆4 带动刨刀5 作往复运动。
刨头左行时,刨刀进行切削,称工作行程,此时要求速度较低并且均匀,以减少电动机容量和提高切削质量,刨头右行时,刨刀不切削,称空行程,此时要求速度较高,以提高生产率。
为此刨床采用有急回作用的导杆机构。
刨刀每切削完一次,利用空回行程的时间,通过棘轮带动螺旋机构(图中未画),使工作台连同工件作一次进给运动,以便刨刀继续切削。
刨头在工作行程中,受到很大的切削阻力(在切削的前后各有一段约0.05H 的空刀距离),而空回行程中只有摩擦阻力。
因此刨头在整个运动循环中,受力变化是很大的,这就影响了主轴的匀速运转,故需安装飞轮来减小主轴的速度波动,以提高切削质量和减小电动机容量。
2:机构的要求牛头刨床的主传动的从动机构是刨头,在设计主传动机构时,要满足所设计的机构要能使牛头刨床正常的运转,同时设计的主传动机构的行程要有急回运动的特性,刨削速度尽可能为匀速运动,以及很好的动力特性。
机械原理课程设计——牛头刨床

机械能变化曲线:
飞轮设计:
V
A4
=
A2 A4 A2
速度图解法:
V1A+V12=V 2A VF+VFB=V 2B V2B=βV 2A Β为常数比
加速度图解分析: a4An+a4Ar+a24Ar+ak24A =a2A 大小 方向
a4b+aF4Br=aF a4A=βV 4B
进给凸轮机构设计
主体机构设计
牛头刨床主体机构
主体结构设计
设计要求
(1)刨刀工作行程要求速度比较平稳,空回行程时 刨刀快速退回,机构行程速比系数在1.4左右。 (2)刨刀行程H=300mm或H=150mm。曲柄转速、 切削力、许用传动角等见表1,每人选取其中一组数据。 (3)切削力P大小及变化规律如图1所示,在切削行 程的两端留出一点空程。具体数据如下:
主体机构
电机转速n(r/mi n)
切削力P(N)
75
许用传动角[γ]
H=150mm
4500N
45°
刨刀行程:H=150 速比系数:K=1.4
主体机构(方案一)
方案一: 摆动导杆机构与摇杆滑块机构组合机构
机构简图:
计算机构的自由度 F=3×5-2×7=1
主体机构(方案一)
机构尺寸的计算:
在满足压力角条件确定基圆半径,摆杆中心间的中心距。
• 推程许用压力角为[α]= 38°; • 回程许用压力角为[α’]= 65°; • 试凑法:对照摆杆长度为L,赋值基圆半径, 中心距a=90,r0=50;经试验符合要求
滚子半径rf:rf<ρ mi n -3(mm)及rf<0.8ρ mi n(mm) 方法1用图解法确定凸轮理论廓线上某点A的曲率半径R: 以A点位圆心,任选较小的半径r 作圆交于廓线上,在圆A 两边分别以理论廓线上的B、C为圆心,以同样的半径r 画圆,三个小圆分别交于E、F、H、M四个点处。过E、 F H、M O点 O点近似为凸轮廓线上A OA。并且曲率中心肯定在曲线过A 点的法线上。可以通 过法线与直线EF或HM的交点求曲率中心。
牛头刨床机械原理课程设计6点
一、概述1.课程设计的题目此次课程设计的题目是:牛头刨床的主传动结构的设计. 2.课程设计的任务和目的1)任务:1 牛头刨床的机构选型、运动方案的确定;2 导杆机构进行运动分析;3 导杆机构进行动态静力分析;4.飞轮设计;5.凸轮机构设计。
2)目的:机械原理课程设计是培养学生掌握机械系统运动方案设计能力的技术基础课程,它是机械原理课程学习过程中的一个重要实践环节。
其目的是以机械原理课程的学习为基础,进一步巩固和加深所学的基本理论、基本概念和基本知识,培养学生分析和解决与本课程有关的具体机械所涉及的实际问题的能力,使学生熟悉机械系统设计的步骤及方法,其中包括选型、运动方案的确定、运动学和动力学的分析和整体设计等,并进一步提高计算、分析,计算机辅助设计、绘图以及查阅和使用文献的综合能力。
.3.课程设计的要求牛头刨床的主传动的从动机构是刨头,在设计主传动机构时,要满足所设计的机构要能使牛头刨床正常的运转,同时设计的主传动机构的行程要有急回运动的特性,以及很好的动力特性。
尽量是设计的结构简单,实用,能很好的实现传动功能。
二.机构简介与设计数据1,机构简介牛头刨床是一种用于平面切削加工的机床,如图4-1。
电动机经皮带和齿轮传动,带动曲柄2和固结在其上的凸轮8。
刨床工作时,由导杆机构2-3-4-5-6带动刨头6和刨刀7作往复运动。
刨头右行时,刨刀进行切削,称工作行程,此时要求速度较低并且均匀,以减少电动机容量和提高切削质量;刨头左行时,刨刀不切削,称空回行程,此时要求速度较高,以提高生产效率。
为此刨床采用有急回作用的导杆机构。
刨刀每切削完一次,利用空回行程的时间,凸轮8通过四杆机构1-9-10-11与棘轮带动螺旋机构(图中没有画出),使工作台连同工件一次进级运动,以便刨刀继续切削。
刨头在工作行程过程中,受到很大的切削阻力(在切削的前后各有一段约0.05H的空刀距离,见图4-1,b)而空回行程中则没有切削阻力。
设计牛头刨床中的凸轮机构方案

设计牛头刨床中的凸轮机构
1.凸轮机构的设计要求 运动规律为等加速等法
3.摆动从动件盘形凸轮轮廓设计
(1)设计凸轮轮廓依据反转法原理 (2)设计凸轮轮廓的步骤
人有了知识,就会具备各种分析能力, 明辨是非的能力。 所以我们要勤恳读书,广泛阅读, 古人说“书中自有黄金屋。 ”通过阅读科技书籍,我们能丰富知识, 培养逻辑思维能力; 通过阅读文学作品,我们能提高文学鉴赏水平, 培养文学情趣; 通过阅读报刊,我们能增长见识,扩大自己的知识面。 有许多书籍还能培养我们的道德情操, 给我们巨大的精神力量, 鼓舞我们前进。
机械原理课程设计 牛头刨床凸轮机构
机械原理课程设计设计题目:牛头刨床凸轮机构班级:加工06-2班姓名:井源指导教师:席本强何凡目录1.设计题目及参数2.数学模型的建立3.程序框图4.程序清单及运行结果5.设计总结6.参考文献1设计题目与参数已知摆杆9为等加速等减速运动规律,其推程运动角φ=70,远休止角φs =10,回程运动角φ΄=70,摆杆长度l 09D =125,最大摆角φmax =15,许用压力角[α]=40,凸轮与曲线共轴。
要求:(1) 计算从动件位移、速度、加速度并绘制线图(用方格纸绘制),也可做动态显示。
(2) 确定凸轮的基本尺寸,选取滚子半径,画出凸轮的实际廓线,并按比例绘出机构运动简图。
(3) 编写计算说明书。
2数学模型(1) 推程等加速区当2/0ϕδ≤≤时 22max /21ϕδϕ=m (角位移) 2max /4ϕδϕω=(角速度)2max /4ϕϕε=(角加速度)(2) 推程等减速区当ϕδϕ≤<2/时 22max max /)(21ϕδϕϕϕ--=m (角位移)2max /)(4ϕδϕϕω-=(角速度) 2max /4ϕϕε-=(角加速度) (3) 远休止区当s ϕϕδϕ+≤<时 max 1ϕ=m (角位移) 0=ω (角速度)0=ε(角加速度)(4) 回程等加速区 当/ϕϕϕδϕϕ'++≤<+s s 时22max max /)(21ϕϕϕδϕϕ'---=s m (角位移)2max /)(4ϕϕϕδϕω'---=s (角速度)2max /4ϕϕε'-=(角加速度)(5) 回程等减速区 当ϕϕϕδϕϕϕ'++≤<'++s s 2/时22max /)(21ϕδϕϕϕϕ'-'++=s m (角位移)2max /)(4ϕδϕϕϕϕω'-'++-=s (角速度) 2max /4ϕϕε'=(角加速度) (6) 近休止区01=m (角位移) 0=ω(角速度)0=ε(角加速度)一、如图选取xOy 坐标系,B1点为凸轮轮廓线起始点。
机械原理牛头刨床课程设计----运动分析

机械原理牛头刨床课程设计----运动分析第一篇:机械原理牛头刨床课程设计----运动分析3的角位移l1=120;l6=240;x=-pi/6:2*pi/36:11*pi/6;y=atan((l6+l1*sin(x))./(l1*cos(x)));fori=14:1:31 y(i)=pi+y(i);end >> plot(x*180/pi,y*180/pi) E的位移 l1=120;l6=240;x=-pi/6:2*pi/36:11*pi/6;y=atan((l6+l1*sin(x))./(l1*cos(x)));for i=14:1:31 y(i)=pi+y(i);end l=466.507;l3=500;l4=97.929;a=pi-asin((l-l3*sin(y))./l4);b=l3*cos(y)+l4*cos(a);plot(x*180/pi,b) 4的角位移l1=120;l6=240;x=-pi/6:2*pi/36:11*pi/6;y=atan((l6+l1*sin(x))./(l1*cos(x)));for i=14:1:31 y(i)=pi+y(i);end l=466.507;l3=500;l4=97.929;a=pi-asin((l-l3*sin(y))./l4);>> plot(x*180/pi,a*180/pi)3的角速度l1=120;l6=240;x1=-pi/6:2*pi/36:11/6*pi;y1=l1*2*pi*(l1+l6*sin(x1))./(l6*l6+l1*l1+2*l6 *l1*sin(x1));plot(x1*180/pi,y)4的角速度l1=120;l6=240;>> x=-pi/6:2*pi/36:11*pi/6;>> y=atan((l6+l1*sin(x))./(l1*cos(x)));>> for i=14:1:31 y(i)=pi+y(i);end >> l=466.507;l3=500;l4=97.929;>> a=pi-asin((l-l3*sin(y))./l4);>>y1=l1*2*pi*(l1+l6*sin(x))./(l6*l6+l1*l1+2*l6*l1*sin(x));>>y4=(y1.*l3.*cos(y))./(l4.*cos(a));>> plot(x*180/pi,y4)E的速度l1=120;l6=240;x=-pi/6:2*pi/36:11*pi/6;y=atan((l6+l1*sin(x))./(l1*cos(x)));fori=14:1:31 y(i)=pi+y(i);end l=466.507;l3=500;l4=97.929;a=pi-asin((l-l3*sin(y))./l4);y1=l1*2*pi*(l1+l6*sin(x))./(l6*l6+l1*l1+2*l6*l1*sin(x ));>> v=-(y1.*l3.*sin(y+a))./cos(a);>> plot(x*180/pi,v)3的角加速度l1=120;l6=240;x=-pi/6:2*pi/36:11*pi/6;y3=(l6.*l6-l1.*l1).*l6.*l1.*2.*2.*pi.*pi.*cos(x)./((l6.*l6+l1.*l1+2.*l6.*l1.*sin(x)).* (l6.*l6+l1.*l1+2.*l6.*l1.*sin(x)));>>plot(x*180/pi,y3)4的角加速度>> l1=120;l6=240;x=-pi/6:2*pi/36:11*pi/6;y=atan((l6+l1*sin(x))./(l1*cos(x)));fori=14:1:31 y(i)=pi+y(i);end l=466.507;l3=500;l4=97.929;a=pi-asin((l-l3*sin(y))./l4);y1=l1*2*pi*(l1+l6*sin(x))./(l6*l6+l1*l1+2*l6*l1*sin(x ));y4=-(y1.*l3.*cos(y))./(l4.*cos(a));>> y3=(l6.*l6-l1.*l1).*l6.*l1.*2.*2.*pi.*pi.*cos(x)./((l6.*l6+l1.*l1+2.*l6.*l1.*sin(x)).* (l6.*l6+l1.*l1+2.*l6.*l1.*sin(x)));a4=((y3.*l3.*cos(y)-y1.*y1.*l3.*sin(y)).*l4.*cos(a)+y1.*l3.*l4.*cos(y).*sin(a).*y4)./((l4.*c os(a)).*(l4.*cos(a)));>> plot(x*180/pi,a4)E的加速度l1=120;l6=240;x=-pi/6:2*pi/36:11*pi/6;y=atan((l6+l1*sin(x))./(l1*cos(x)));fori=14:1:31 y(i)=pi+y(i);end l=466.507;l3=500;l4=97.929;a=asin((l-l3*sin(y))./l4);y1=l1*2*pi*(l1+l6*sin(x))./(l6*l6+l1*l1+2*l6*l1*sin(x ));y4=-(y1.*l3.*cos(y))./(l4.*cos(a));y3=(l6.*l6-l1.*l1).*l6.*l1.*2.*2.*pi.*pi.*cos(x)./((l6.*l6+l1.*l1+2.*l6.*l1.*sin(x)).* (l6.*l6+l1.*l1+2.*l6.*l1.*sin(x)));>> e=-((y3.*l3.*sin(y-a)+y1.*l3.*cos(y+a).*(y1+y4)).*cos(a)+y1.*l3.*sin(y+a).*sin(a).*y4). /(cos(a).*cos(a));>> plot(x*180/pi,e)第二篇:机械原理课程设计牛头刨床机械原理课程设计——牛头刨床设计说明书(3)待续2.6.滑块6的位移,速度,加速度随转角变化曲线§其位移,速度,加速度随转角变化曲线如图所示:三.设计方案和分析§3.1方案一3.1.1方案一的设计图3.1.2方案一的运动分析及评价(1)运动是否具有确定的运动该机构中构件n=5。
机械原理课程设计 牛头刨床凸轮机构

机械原理课程设计编程说明书设计题目:牛头刨床凸轮机构设计指导教师:席本强何凡设计者:康政学号:班级:加工06-22008年7月9日辽宁工程技术大学目录1. 设计任务及要求 (2)2. 数学模型的建立 (3)3. 程序框图 (5)4. 程序清单及运行结果 (5)5. 参考文献 (17)6. 设计总结 (17)7. 标题栏 (19)凸轮机构的设计1.基本条件与要求已知: 从动件的最大摆角 max Φ 许用压力角][α,从动件的长度D o l 9,推程运动角ϕ,远休止角ϕs ,回程运动角ϕ,从动件见运动规律为等加、等减速运动,凸轮与曲柄共轴。
要求: 1) 计算从动件位移、速度、加速度并绘制线图,也可做动态显示。
2) 确定凸轮机构的基本尺寸,选取滚子半径,画出凸轮实际轮廓线,并按比例绘出机构运动简图,以上内容作在2号图纸上。
3) 编写说明书2.数学模型的建立1.设从动件起始角.300=Φ2. 1),2/1Φ<Φ升程加速区,其运动方程为:);1*1max/(*4:)1*1/(max**4:)2*1/(*max *2ΦΦΦ=ΦΦΦΦ=ΦΦΦΦΦ=Φεω2),12/1Φ<Φ<=Φ 属于升程减速区,其运动方程为::1*1m ax /*4:1*1/)1(m ax **4:)1*1/()1(*)1(m ax **2m ax ΦΦΦ-=ΦΦΦ-ΦΦ=ΦΦΦ-ΦΦ-ΦΦ-Φ=Φεω3),211Φ+Φ<Φ<=Φ,属于远休止区,其运动方程为::0:0:max ==Φ=Φεω4)),2/321()21(Φ+Φ+Φ<Φ<=Φ+Φ属于回程加速区,其运动方程为::)3*3max/(*4:)3*3/()]21([max**4:)3*3/()]21([*)]21([max *2max ΦΦΦ-=ΦΦΦ+Φ-ΦΦ=ΦΦΦ+Φ-ΦΦ+Φ-ΦΦΦ-Φ=Φεω 5))321()2/321(Φ+Φ+Φ<Φ<=Φ+Φ+Φ,属于回程减速区,其运动方程为::)3*3max/(*4:)3*3/()321(max**4:)3*3/()321(*)321(max**2ΦΦΦ=ΦΦΦ-Φ+Φ+ΦΦ-=ΦΦΦ-Φ+Φ+ΦΦ-Φ+Φ+ΦΦ=Φεω6)360)321(<Φ<=Φ+Φ+Φ ,于近休止区,其运动方程为:0:0:0===Φεω3.程序框图4.程序清单及运行结果1)源程序#include<math.h>#include<dos.h>#include<graphics.h>#include<conio.h>#include<stdio.h>#define I 135.0#define Aa 42#define rb 50#define rr10#define K (3./180)#define dt 0.25float Qmax,Q1,Q2,Q3;float Q_a;double L,pr;float e[1500],f[1500],g[1500];void Cal(float Q,double Q_Q[3]){Qmax=15,Q1=75,Q2=10,Q3=70;if(Q>=0&&Q<=Q1/2){Q_Q[0]=K*(2*Qmax*Q*Q/(Q1*Q1));Q_Q[1]=4*Qmax*Q/(Q1*Q1);Q_Q[2]=4*Qmax/(Q1*Q1);}if(Q>Q1/2&&Q<=Q1){Q_Q[0]=K*(Qmax-2*Qmax*(Q-Q1)*(Q-Q1)/(Q1*Q1));Q_Q[1]=4*Qmax*(Q1-Q)/(Q1*Q1);Q_Q[2]=-4*Qmax/(Q1*Q1);}if(Q>=Q1&&Q<=Q1+Q2){Q_Q[0]=K*Qmax;Q_Q[1]=0;Q_Q[2]=0;}if(Q>Q1+Q2&&Q<=Q1+Q2+Q3/2){Q_Q[0]=K*(Qmax-2*Qmax*(Q-Q1-Q2)*(Q-Q1-Q2)/(Q3*Q3)); Q_Q[1]=-4*Qmax*(Q-Q1-Q2)/(Q3*Q3);Q_Q[2]=-4*Qmax/(Q3*Q3);}if(Q>Q1+Q2+Q3/2&&Q<Q1+Q2+Q3){Q_Q[0]=K*(2*Qmax*(Q3-Q+Q1+Q2)*(Q3-Q+Q1+Q2)/(Q3*Q3)); Q_Q[1]=-4*Qmax*(Q3-Q+Q1+Q2)/(Q3*Q3);Q_Q[2]=4*Qmax/(Q3*Q3);}if(Q>Q1+Q1+Q3&&Q<=360){Q_Q[0]=K*0;Q_Q[1]=0;Q_Q[2]=0;}}void Draw(float Q_m){float tt,x,y,x1,y1,x2,y2,x3,x4,y3,y4,dx,dy;double QQ[3];circle(240,240,5);circle(240+L*sin(60*K),240-L*cos(60*K),5);moveto(240,240);lineto(240+20*cos(240*K),240-20*sin(240*K));lineto(260+20*cos(240*K),240-20*sin(240*K));lineto(240,240);moveto(240+L*sin(60*K),240-L*cos(60*K));lineto(240+L*sin(60*K)+20*cos(240*K),240-L*cos(60*K)-20*sin(2 40*K));lineto(240+L*sin(60*K)+20*cos(60*K),240-L*cos(60*K)-20*sin(24 0*K));lineto(240+L*sin(60*K),240-L*cos(60*K));for(tt=0;tt<=720;tt=tt+2){Cal(tt,QQ);/*tulunlunkuoxian*/x1=L*cos(tt*K-30*K)-I*cos(Q_a+QQ[0]+tt*K-30*K);y1=I*sin(Q_a+QQ[0]+tt*K-30*K)-L*sin(tt*K-30*K);x2=x1*cos(Q_m*K)-y1*sin(Q_m*K);y2=x1*sin(Q_m*K)+y1*cos(Q_m*K);putpixel(x2+240,240-y2,2);dx=(QQ[1]+1)*I*sin(Q_a+QQ[0]+tt*K-30*K)-L*sin(tt*K-30*K); dy=(QQ[1]+1)*I*cos(Q_a+QQ[0]+tt*K-30*K)-L*cos(tt*K-30*K); x3=x1+rr*dy/sqrt(dx*dx+dy*dy);y3=y1-rr*dx/sqrt(dx*dx+dy*dy);x4=x3*cos(Q_m*K)-y3*sin(Q_m*K);y4=x3*sin(Q_m*K)+y3*cos(Q_m*K);putpixel(x4+240,240-y4,YELLOW);}}void Curvel(){int t;float y1,y2,y3,a=0;for(t=0;t<=360/dt;t++){delay(300);a=t*dt;if(a>=0&&a<=Q1/2){y1=(2*Qmax*pow(a,2)/pow(Q1,2))*10;y2=(4*Qmax*(dt*K)*a/pow(Q1,2))*pow(10,4.8);y3=(4*Qmax*pow((dt*K),2)/pow(Q1,2))*pow(10,8.5); putpixel(100+a,300-y2,2);putpixel(100+a,300-y3,4);line((100+Q1+Q2+Q3),300-y3,(100+Q1+Q2+Q3),300); line((100+Q1+Q2+Q3/2),300,(100+Q1+Q2+Q3/2),300-y3); }if((a>Q1+Q2+Q3)&&(a<=360)){y1=0;y2=0;y3=0;putpixel(100+a,300,1); putpixel(100+a,300,2); putpixel(100+a,300,4);}e[t]=y1;f[t]=y2;g[t]=y3;}}main(){int gd=DETECT,gm;int i,t,choice,x_I,y_I,flag=1; double QQ1[3],aa; initgraph(&gd,&gm,""); cleardevice();for(t=0;!kbhit();t++){for(;t<360;)t-=360;if(flag==1)for(L=I-rb+70;L<I+rb;L+=2){Q_a=acos((L*L+I*I-rb*rb)/(2.0*L*I));Cal(t,QQ1);aa=atan(1*(1-QQ1[1]-L*cos(Q_a-QQ1[0]))/(L*sin(Q_a+QQ1[0]))); pr=(pow((L*L+I*I*(1+QQ1[1])*(1+QQ1[1])-2.0*L*I*(1+QQ1[1]*c os(Q_a+QQ1[0]))),3.0/2))/((1+QQ1[1])*(2+QQ1[1])*L*I*cos(Q_a+QQ1[0])+QQ1[2]*L*I*sin (Q_a+QQ1[0])-L*L-I*I*pow(1+QQ1[1],3));if(aa<=Aa&&pr>rr)flag=0;break;}if(flag==0)Cal(t,QQ1);Draw(t);cleardevice();x_I=240+L*sin(60*K)-I*cos(Q_a+QQ1[0]-30*K);y_I=240-L*cos(60*K)-I*sin(Q_a+QQ1[0]-30*K);circle(x_I,y_I,rr);line(240+L*sin(60*K),240-L*cos(60*K),x_I,y_I);delay(1);}getch();cleardevice();line(100,80,100,445);line(70,300,530,300);line(100,80,98,90);line(100,80,102,90);line(520,298,530,300);line(520,302,530,300);setcolor(2);outtextxy(300,150," ");printf("\n\n\n\n\n\Q(w,t)");printf("\n\n\n\n\n\n\n\n\n\n\n\n\n\n\t\t\t \t\t\t\t\tt");Curvel();getch();printf("\n\n\n\n\n\n\n\n\n\n");or(i=0;i<=1440;i=i+20){delay(1000);{printf("%d%f%f%f\n",i/4,e[i],f[i],g[i]);}getch();}closegraph();}2)曲线图象及输出数据5.参考文献1).《机械原理》孙桓、陈作模、葛文杰,高等教育出版社,2005.122).《C程序设计》谭浩强,高等教育出版社,1988.126.设计总结设计总结一周的课程设计马上就结束了,就我个人而言,我想通过本次课程设计对我两年来在大学学到的知识做一次小结,同时为将来工作进行一次适应性训练,从中锻炼自己分析问题、解决问题的能力,为今后自己的研究生生活打下一个良好的基础。
机械原理课程设计牛头刨床
《机械原理》课程设计计算说明书设计题目:牛头刨床学院:机械工程学院专业班级:机自1421班学生姓名:郭文超学号: 03320142108指导教师:赵楠2016年07月04日——2016年07月07日目录工作原理 (3)一.设计任务 (4)二.设计数据 (4)三.设计要求 (5)1、运动方案设计 (5)2、确定执行机构的运动尺寸 (5)3、进行导杆机构的运动分析四.设计方案选定五.1.32.381111 (12)13工作原理.牛头刨床是一种用于平面切削加工的机床,如图a)所示。
电动机经过皮带和齿轮传动,带动曲柄2和固结在其上的凸轮8。
刨床工作时,由导杆机构2-3-4-5-6带动刨头6和刨刀7作往复运动。
刨头左行时,刨刀不切削,称为空回行程,此时要求速度较高,以提高生产率。
为此刨床采用有急回运动的导杆10-11各有一段0.05H(a)(b)图d表2求出刨头3的速度、加速度,将过程详细地写在说明书中。
四.设计方案选定如图所示,牛头刨床的主传动机构采用导杆机构、连杆滑块机构组成的5杆机构。
采用导杆机构,滑块与导杆之间的传动角r始终为90o,且适当确定构件尺寸,可以保证机构工作行程速度较低并且均匀,而空回行程速度较高,满足急回特性要求。
适当确定刨头的导路位置,可以使压力角 尽量小。
五.机构的运动分析1.3点速度分析当曲柄位于3点时如上图已知:ω04=2πn/60=7.536rad/sV A4 = V A3A4 + V A3方向:⊥杆4 ∥杆4 ⊥杆2大小:??√已知:V A3=ω04×L2 =7.536×110=828.96mm/s 作图得:V A4=670.05MM/Sω04=V A4/L AO4=670.05/513.91=1.306rad/s V B=ω04×L4=1.306 ×810=1057.86mm/sVc= V B + V CB方向:∥X-X √⊥杆BC大小:?√?由作图法得::V C2和3在A点处的转其大小等于ω22lO2A,方向由A指向O2。
哈工大机械原理课程设计说明书牛头刨床方案一(完美版)
Harbin Institute of Technology机械原理课程设计说明书课程名称:机械原理设计题目:牛头刨床(方案1)院系:机电工程学院班级:1108301设计者:XXX学号:11108301XX指导教师:古乐设计时间:2013年7月哈尔滨工业大学一、功能描述刨刀水平作往复直线运动,切削安装在工作台上的工件。
刨刀每次切削一次,工作台沿着刨刀运动的水平垂直方向进给0.12、0.24、0.36mm/次,分3档可以调节。
刨刀每次切削一次,工作台沿着刨刀运动的上下垂直方向进给0.08、0.16、0.24mm/次,分3档可以调节。
工作台的水平与垂直进给不能同时进行。
刨刀最大行程520mm,每分钟刨刀切削15,24,37次,分3档可以调节。
电机功率约4KW,额定转速1420转/分。
图1-1 牛头刨床的使用功能描述简图二、工艺动作分析由使用功能描述可知,牛头刨床在加工平面时有两个工艺动作协调完成,即刨刀每切削一次,工作台沿着刨刀运动的水平垂直方向移动5mm以及工作台沿着刨刀运动的水平垂直方向的移动。
根据牛头刨床的工艺动作分析,选定执行构件刨刀头作为参考构件,据此,可以画出牛头刨床的运动循环图。
图2-1机械系统运动循环图三、运动功能分析根据分析的牛头刨床由原动机到执行机构的运动传递与转换的逻辑关系,可以绘制出牛头刨床的运动功能系统图。
图3-1 机械系统运动功能系统图四、机械系统运动方案拟定4.1 根据运动功能单元确定替代结构(1)一般情况下,在工厂的厂房内使用的普通机床都采用三相交流电动机作为原动机。
因此,牛头刨床也用三相交流电动机作为原动机,其额定转速为1420rpm。
图4-1 三相交流电动机及其运动功能单元表达符号(2)带传动机构具有传动可靠、结构简单、安装方便、制造成本低等优点。
在对尺寸要求不严格、传运精度要求不高的牛头刨床中,可以选用带传动机构满足过载保护的功能。
图4-2 带传动机构及其运动功能单元表达符号(3)圆柱齿轮传动机构具有传动可靠、结构简单、强度高、结构尺寸小等优点。
设计牛头刨床中的凸轮机构
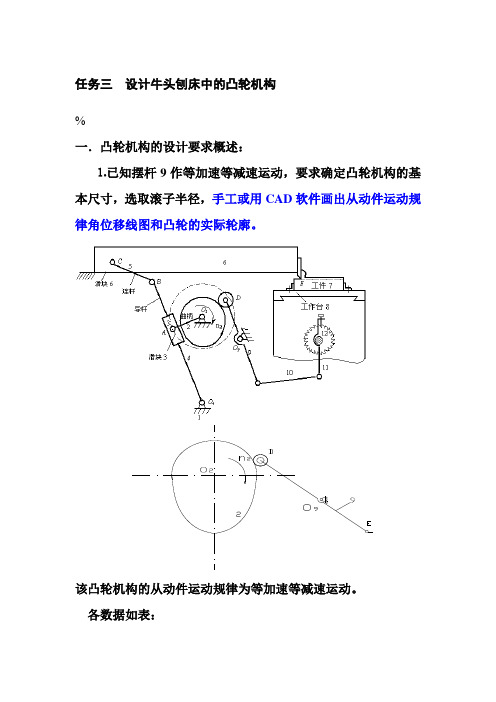
任务三设计牛头刨床中的凸轮机构%一.凸轮机构的设计要求概述:⒈已知摆杆9作等加速等减速运动,要求确定凸轮机构的基本尺寸,选取滚子半径,手工或用CAD软件画出从动件运动规律角位移线图和凸轮的实际轮廓。
该凸轮机构的从动件运动规律为等加速等减速运动。
各数据如表:符号ψmax l O9D l O9O2 r o r t Φ Φs Φ’单位°mm ° 数据 15 126 150 61 15 65 10 65二.从动件运动规律角位移线图的画法:①、绘制坐标轴。
取凸轮转角的比例尺μφ =.2.6°/mm ,在Φ轴上分别量取Φ=65°、Φs=10°、Φ’=65°;取螺杆摆角的比例尺μψ=1°/mm 。
在ψ轴上量取ψmax =15°; ②、将Φ=65°、Φ’=65°分别等分成5等分,则得各等分点1、2…10。
③、绘制推程的位移线图。
过3点作ψ轴的平行线,在该平行线上截取线段高度为ψmax =15°,将该线段等分成6等分(注意应与角Φ的等分数相同),得各等分点,如前半推程的1'、2'、3'; 将坐标原点分别与点1'、2'、3'相连,得线段O1'、O2'和03',分别与过1、2、3点且平行与Ψ轴的直线交于1"、2"和3";将点0、1"、2"、3"连成光滑的曲线,即为等加速运动的位移曲线的部分,后半段等减速运动的位移曲线的画法与之相似,只是弯曲方向反过来,见图。
同理可得回程的位移曲线。
(.)φ(.)三、摆动从动件盘形凸轮轮廓设计:⑴设计原理设计凸轮轮廓依据反转法原理。
即在整个机构加上公共角速度(-ω)(ω为原凸轮旋转角速度)后,将凸轮固定不动,而从动件连同机架将以(-ω)绕凸轮轴心O2逆时针方向反转,与此同时,从动件将按给定的运动规律绕其轴心O9相对机架摆动,则从动件的尖顶在复合运动中的轨迹就是要设计的凸轮轮廓。
机械原理牛头刨床课程设计
机械原理课程设计牛头刨床一、机构简介与设计数据1.机构简介牛头刨床是一种用于平面切削加工的机床,如图4-1。
电动机经皮带和齿轮传动,带动曲柄2和固结在其上的凸轮8。
刨床工作时,有倒杆机构2-3-4-5-6带动刨头6和刨刀7作往复运动。
刨头右行时,刨刀进行切削,称工作行程,此时要求速度较低并且均匀,以减少电动机容量和提高切削质量。
刨头左行时,刨刀不切削,称空回行程。
此时要求速度较高,以提高生产率。
为此刨床采用急回作用的导杆机构。
刨刀每切削完一次,利用空回行程的时间,凸轮8通过四杆机构1-9-10-11与棘轮带动螺旋机构(图中未画),使工作台连同工件作一次进给运动,以便刨刀继续切削。
刨头在工作行程中,受到很大的切削阻力(在切削的前后各有一段约0.05H的空刀距离,见图1b),而空回行程中则没有切削阻力。
因此刨头在整个运动循环中,受力变化是很大的,这就影响了主轴的匀速运转.故需安装飞轮来减小主轴的速度波动,以提高切削质量和减少电动机容量。
a) b)图1 牛头刨床机构简图及阻力曲线图2、设计数据,见表1。
表1 设计数据二.设计内容1.导杆机构的运动分析已知 曲柄每分钟转数2n ,各机构尺寸及重心位置,且刨头导路x-x 位于导杆端点B 所作圆弧高的平分线上(见图2)。
要求 作机构的运动简图,并作机构两个位置的速度、加速度多边形以 图2 曲柄位置图 及刨头的运动线图。
以上内容与后面动态静力分析一起画在1号图纸上(参考图例1)。
曲柄位置图的作法为(图2)取1和为工作行程起点和终点所对应的曲柄位置,和为切削起点和终点所对应的曲柄位置,其余2、3〃〃〃12等,是由位置1起,顺方向将曲柄圆周作12等分的位置。
2.导杆机构的动态静力分析已知 各机构的重量G (曲柄2、滑块3和连杆5的重量都可以忽略不计),导杆4绕重心的转动惯量及切削力P 的变化规律(图1b )。
表2 机构位置分配表要求按表4-2所分配的第二行的一个位置,求各运动副中反作用力及曲柄上所需的平衡力矩。
机械原理课程设计--牛头刨床设计

机械原理课程设计计算说明书设计题目:牛头刨床设计专业:机械类11(3)_____机械与自动控制学院机械原理课程设计任务书课程设计题目:牛头刨床设计已知技术参数和设计要求:1.已知技术参数图1 牛头刨床机构简图及阻力线图表1 设计数据导杆机构运动分析2n24O Ol2O Al4O BlBCl44O Sl6Sx6Sy工作行程H行程速比系数K目录1.牛头刨床的工作原理和机构组成 (5)2.导杆机构 (6)2.1.导杆机构尺寸的确定 (6)2.2.导杆机构的运动分析 (6)2.3导杆机构的动态静力分析 (13)3.凸轮机构的设计 (16)4.齿轮机构的设计 (18)5.飞轮机构的设计 (19)6.设计小结 (20)参考文献 (20)1.牛头刨床的工作原理与机构组成牛头刨床是一种用于平面切削加工的机床,如图。
电动机经皮带和齿轮传动,带动曲柄2和固结在其上的凸轮8.刨床工作时,由导杆机构2-3-4-5-6带动刨头6和刨刀7做往复运动。
刨头右行时,刨刀进行切削,称工作行程,此时要求速度较低并且均匀,以减少电动机容量和提高切削质量;刨头左行时,刨刀不切削,称回行程,此时要求速度较低并且均匀,以提高生产效率。
为此刨刀采用有急回作用的导杆机构。
刨刀每切削完一次,利用空回行程的时间,凸轮8通过四杆机构1-9-10-11与棘轮带动螺旋机构(图中未画),使工作台连同工件作一次进给运动,以便刨刀继续切削。
刨头在工作行程中,受到很大的切削阻力(在切削的前后各有一段约0.05H的空刀距离),而空回行程中则没用切削阻力。
因此刨头在整个运动循环中,受力变化是很大的,这就影响了主轴的匀速运转,故需安装飞轮来减小主轴的速度波动,以提高切削质量和减少电动机容量。
图1-1 牛头刨床机构简图及阻力曲线图2.导杆机构2.1.导杆机构尺寸的确定表2-1 导杆设计数据导杆机构运动分析2n24O Ol2O Al4O BlBCl44O Sl6Sx6Sy工作行程H行程速比系数K47 390 110 540 0.334O Bl0.54O Bl240 50 310 1.40导杆机构的动态静力分析4G6G ppy4SJ 260 800 4200 80 1.22.2.导杆机构的运动分析2.2.1.设计步骤做机构的运动简图,并作机构两位置的速度、加速度多边形。
机械设计牛头刨床
《机械原理课》程设计报告仲恺农业工程学院《机械原理》课程设计报告题目:牛头刨床设计专业:班级:学号:姓名:指导教师:目录工作原理 (3)设计要求 (3)设计内容及工作量 (4)一.连杆机构的对比 (5)二. 拟定机械传动方案 (6)三. 机械运动方案示意图 (6)四. 机构运动简图 (7)五. 导杆机构的运动分析 (8)六. 导杆机构的动静力分析 (12)七. 凸轮机构的设计 (13)八. 总结 (15)九.参考文献 (15)工作原理:牛头刨床是一种靠刀具的往复直线运动及工作台的间歇运动来完成工件的平面切削加工的机床。
图1是参考示意图。
电动机经过减速传动装置带动执行机构(导杆机构和凸轮机构)完成刨刀的往复运动和间歇运动。
刨床工作时,刨头由曲柄带动右行,刨刀进行切削,称为工作行程。
在切削行程H中,前后各有一段0.05H的空刀距离,工作阻力F 为常数;刨刀左行时,即为空回行程,此行程无工作阻力。
在刨刀空回行程时,由摆动从动件盘形凸轮机构通过四杆机构驱动棘轮机构,棘轮机构带动螺旋机构使工作台连同工件在垂直纸面方向上做一次进给进给运动,以便刨刀继续切削。
设计要求:电动机轴与曲柄轴平行,刨刀刀刃点与铰链点的垂直距离为50mm,使用寿命10年,每日一班制工作,载荷有轻微冲击。
允许曲柄转速偏差为±5%。
要求导杆机构的最大压力角应为最小值;凸轮机构的最大压力角应在许用值[α]之内,摆动从动件的升、回程运动规律均为等加速、等减速运动。
执行构件的传动效率按0.95计算,系统有过载保护。
按小批量生产规模设计。
导杆机构运动分析转速n2(r/min) 工作行程H(mm) 行程速比系数K50 300 1.38凸轮机构运动分析从动件最大摆角ϕmax(°)摆动从动件杆长许用压力角[α](°)推程运动角δ0(°)远休止角δs(°)回程运动角δ0’ (°)15 128 41 62 10 60导杆机构运动动态静力分析工作阻力F max(N) 导杆质量m4(kg) 滑块6质量m6(kg) 导杆4质心转动惯量J s4(kgm2) 4600 20 80 1.2设计内容及工作量:1、根据牛头刨床的工作原理,拟定2~3个其他形式的执行机构(连杆机构),并对这些机构进行分析对比。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机械原理课程设计-牛头刨床凸轮机构
牛头刨床凸轮机构是一种被广泛应用在机械加工中的机构。
它具有较高的效率,能够提供精确而又质量高的加工结果。
牛头刨床凸轮机构由三部分组成:刨床、刀具和传动机构。
刨床主要由主轴、轴类、滑块、变位器杆和机座等组成,其动作是:主轴通过电机传动,带动滑块、变位器杆和刀具同步运动,使加工物把后刀具推向前刀具,达到切削加工的目的。
要保证牛头刨床凸轮机构的良好运行,首先要正确的校正凸轮的定位。
精确的定位可以有效的提高机构的定位精度,从而保证工件的加工精度。
其次,要检查机构的传动装置和同步转向机构的运行状况,排除可能存在的故障。
最后,要定期检查加工质量,以确保良好的加工质量。
此外,在运行牛头刨床凸轮机构时,也需要遵守特定的安全操作规则,并且有一定的操作技巧,以避免出现事故。
出现危险时,需及时警醒,并采取有效的措施,以确保机构的安全运行。
牛头刨床凸轮机构是用于金属加工的一种高效率、高精度的机构,而且在机械加工中应用十分广泛。
当正确、安全地使用时,机构可获得较高的加工效果,同时也可以减少损失。
因此,使用该机构时应非常重视安全,并且要充分了解机构特性,以获得最佳的加工效果。