电力拖动控制系统仿真举例
《电力拖动自动控制系统》课程实践报告--双闭环直流调速系统MATLAB仿真
《电力拖动自动控制系统》课程实践报告--双闭环直流调速系统MATLAB仿真安阳师范学院物理与电气工程学院基于matelab仿真平台《电机拖动自动控制系统》课程实践双闭环直流调速系统MATLAB仿真指导老师:苗风东姓名:韩衍翀班级:电气一班学号:111102022双闭环直流调速系统MATLAB仿真摘要转速、电流双闭环控制直流调速系统是性能很好、应用最广的直流调速系统。
具有调速范围广、精度高、动态性能好和易于控制等优点,所以在电气传动系统中得到了广泛的应用。
常用的电机调速系统有转速闭环控制系统和电流闭环控制系统,二者都可以在一定程度上克服开环系统造成的电动机静差率,但是不够理想。
实际设计中常采用转速、电流双闭环控制系统,一般使电流环(ACR)作为控制系统的内环,转速环(ASR)作为控制系统的外环,以此来提高系统的动态和静态性能。
关键词:直流双闭环调速系统电流调节器转速调节器主电路原理图及其说明主电路采用转速、电流双闭环调速系统,使电流环(ACR)作为控制系统的内环,转速环(ASR)作为控制系统的外环,以此来提高系统的动态和静态性能。
二者串级连接,即把电流调节器的输出作为转速调节器的输入,再用转速调节器的输出去控制电力电子变换器UPE。
从而改变电机的转速。
通过电流和转速反馈电路来实现电动机无静差的运行。
仿真结构图双闭环调速系统结构框图仿真步骤根据实验指导书给定数据,在MATLAB中的simulink环境中对系统进行仿真,总结构图2,转速环ASR如图3,电流环ACR如图4所示:图 2总结构图图3转速环ASR图4电流环ACR对图3 、图4进行封装,连接主电路图,开始仿真,观察现象。
仿真结果图电机转速n仿真波直流电动机负载电流Id仿真波形转速调节器输出Ui*波形电流调节器输出电压(整流装置输入电压Uct)波形电机电枢电压Ud0波形波形分析:由转速波形和电枢电流波形可以看出,启动过程经过了电流上升、恒流升速和调速阶段。
电力拖动自动控制系统实验报告
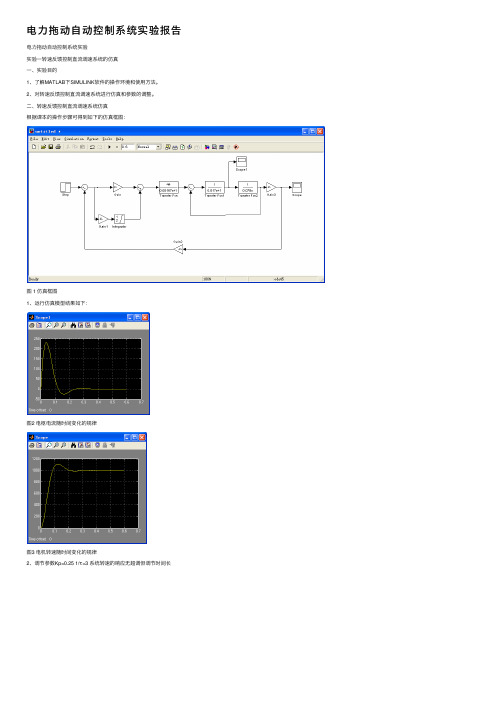
电⼒拖动⾃动控制系统实验报告电⼒拖动⾃动控制系统实验实验⼀转速反馈控制直流调速系统的仿真⼀、实验⽬的1、了解MATLAB下SIMULINK软件的操作环境和使⽤⽅法。
2、对转速反馈控制直流调速系统进⾏仿真和参数的调整。
⼆、转速反馈控制直流调速系统仿真根据课本的操作步骤可得到如下的仿真框图:图 1 仿真框图1、运⾏仿真模型结果如下:图2 电枢电流随时间变化的规律图3 电机转速随时间变化的规律2、调节参数Kp=0.25 1/τ=3 系统转速的响应⽆超调但调节时间长3、调节参数Kp=0.8 1/τ=15 系统转速的响应的超调较⼤,但快速性较好实验⼩结通过本次实验初步了解了MATLAB下SIMULINK的基本功能,对仿真图的建⽴了解了相关模块的作⽤和参数设置。
并可将其⽅法推⼴到其他类型控制系统的仿真中。
实验⼆转速、电流反馈控制直流调速系统仿真⼀、实验⽬的及内容了解使⽤调节器的⼯程设计⽅法,是设计⽅法规范化,⼤⼤减少⼯作计算量,但⼯程设计是在⼀定近似条件下得到的,⽤MATLAB仿真可根据仿真结果对设计参数进⾏必要的修正和调整。
转速、电流反馈控制的直流调速系统是静、动态性能优良、应⽤最⼴泛的直流调速系统,对于需要快速正、反转运⾏的调速系统,缩短起动、制动过程的时间成为提⾼⽣产效率的关键。
为了使转速和电流两种负反馈分别起作⽤,可在系统⾥设置两个调节器,组成串级控制。
⼀、双闭环直流调速系统两个调节器的作⽤1)转速调节器的作⽤(1)使转速n跟随给定电压*mU变化,当偏差电压为零时,实现稳态⽆静差。
(2)对负载变化起抗扰作⽤。
(3)其输出限幅值决定允许的最⼤电流。
2)电流调节器的作⽤(1)在转速调节过程中,使电流跟随其给定电压*iU变化。
(2)对电⽹电压波动起及时抗扰作⽤。
(3)起动时保证获得允许的最⼤电流,使系统获得最⼤加速度起动。
(4)当电机过载甚⾄于堵转时,限制电枢电流的最⼤值,从⽽起⼤快速的安全保护作⽤。
当故障消失时,系统能够⾃动恢复正常。
电力拖动仿真实验(自动保存的)

文档收集于互联网,已重新整理排版.word 版本可编辑,有帮助欢迎下载支持.1文档来源为:从网络收集整理.word 版本可编辑. 实验一 电力拖动仿真基础知识单相半波可控整流电路阻感性负载 单相半波可控整流电路阻感性负载 (︒=30α,L =0.01μF ,R=10Ω) (︒=60α,L =0.01μF ,R=10Ω)单相半波可控整流电路阻性负载 单相半波可控整流电路阻性负载(︒=60α,R=10Ω) (︒=30α,R=10Ω)单相半波可控整流电路阻感性负载及续流管 单相半波可控整流电路阻感性负载及续流管(︒=60α,L =0.01μF ,R=10Ω)(︒=30α,L =0.01μF ,R=10Ω)实验三 三相整流电路的仿真1 、三相半波可控整流电路的仿真阻感性负载(︒=60α,L =0.01μF ,R=10Ω) 阻性负载(︒=30α,R=10Ω)阻性负载(︒=60α,R=10Ω) 阻感性负载(︒=30α,L =0.01μF ,R=10Ω)2、三相全桥式可控整流电路阻性负载(︒=60α,R=10Ω) 阻性负载(︒=60α,R=10Ω)阻感性负载(︒=30α,L =0.01μF ,R=10Ω阻感性负载(︒=30α,L =0.01μF ,R=10Ω)实验四 单闭环直流调速系统MATLAB 仿真1、3/1,25.0==τpi K 2、 43.11/1,56.0==τpi K 3、15/1,8.0==τpi K 实验二单相桥式整流电路仿真阻感性负载 阻感性负载(︒=30α,L =0.01μF ,R=10Ω) (︒=60α,L =0.01μF ,R=10Ω)阻性负载 阻性负载(︒=60α,R=10Ω) (︒=30α,R=10Ω)阻感性负载及续流管 阻感性负载及续流管(︒=30α,L =0.01μF ,R=10Ω) (︒=30α,L =0.01μF ,R=10Ω)。
控制系统仿真第6章 电力电子及电机拖动系统的simscape仿真

该对话框分为上下两部分:上部分为仿 真参数设置对话框,下部分为powergui 提供的一系列分析工具。
“Steady-State Voltage and Currents”: 显示模型中稳态电压和电流 “Initial State Settings”:显示和修改初 始状态 “Load Flow” “Machine Initialization”: 用于执行潮流和电机初始化
在参数设置中,将其类型设置为6脉冲发生器,勾选 触发方式为“双脉冲触发”(Double pulsing)。在双 脉冲触发方式时,下一个晶闸管触发的同时给前一 个晶闸管补一个脉冲,以保证在电流断续时,整流 器上下桥臂都各有一个晶闸管同时导通。该模块输 入端有3个:alpha控制移相角的大小,单位为度; wt端输入同步信号,一般由锁相回路(PLL)产生; block端是控制端口,如果输入block的值大于零, 则输出被禁止。
启动仿真之后,双击 powergui模块,单击 其中的FFT Analysis分 析工具,即可打开FFT 分析窗口。
单相不可控整流电路 直流侧电容两端的电 压以直流成分为主, 但是含有50Hz, 100Hz,200Hz, 300Hz等主要谐波成 分。
6.2 三相桥式全控整流电路的Simscape仿真
“Use LTI Viewer”:启动控制系统工具箱 中线性时不变系统分析工具的LTI浏览器
“Impedance vs Frequency Measurement”:显示阻抗-频率测量值
“FFT Analysis”:快速傅里叶分析
电力拖动自动控制系统Matlab仿真实验报告
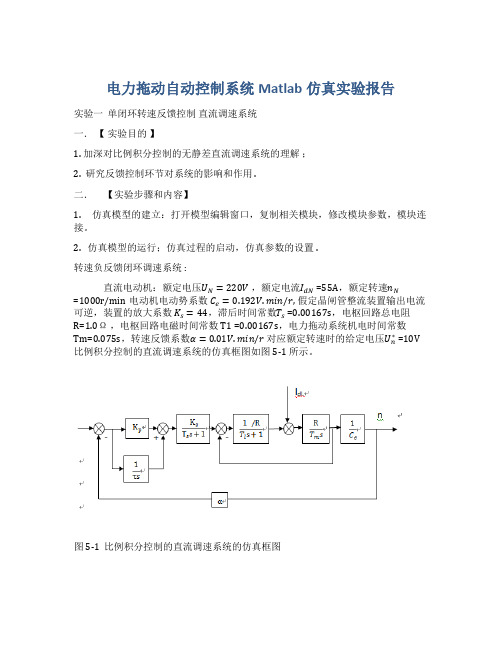
电力拖动自动控制系统Matlab仿真实验报告实验一单闭环转速反馈控制直流调速系统一.【实验目的】1. 加深对比例积分控制的无静差直流调速系统的理解;2. 研究反馈控制环节对系统的影响和作用 .二.【实验步骤和内容】1. 仿真模型的建立:打开模型编辑窗口,复制相关模块,修改模块参数,模块连接。
2. 仿真模型的运行;仿真过程的启动,仿真参数的设置 .转速负反馈闭环调速系统 :直流电动机:额定电压U N=220V,额定电流I dN =55A,额定转速n N=1000r/min电动机电动势系数C e=0.192V.min/r, 假定晶闸管整流装置输出电流可逆,装置的放大系数K s=44,滞后时间常数T s =0.00167s,电枢回路总电阻R=1.0Ω,电枢回路电磁时间常数T1 =0.00167s,电力拖动系统机电时间常数Tm=0.075s,转速反馈系数α=0.01V.min/r对应额定转速时的给定电压U n∗ =10V 比例积分控制的直流调速系统的仿真框图如图 5-1 所示。
图 5-1 比例积分控制的直流调速系统的仿真框图图 5-2 开环比例控制直流调速系统仿真模型图图 5-3 开环空载启动转速曲线图图 5-4 开环空载启动电流曲线图图 5-5 闭环比例控制直流调速系统仿真模型图在比例控制直流调速系统中,分别设置闭环系统开环放大系数 k=0.56 , 2.5, 30 ,观察转速曲线图,随着 K 值的增加,稳态速降减小,但当 K 值大于临界值时,系统将发生震荡并失去稳定,所以 K 值的设定要小于临界值。
当电机空载启动稳定运行后,加负载时转速下降到另一状态下运行,电流上升也随之上升。
图 5-6 k=0.56 转速曲线图图 5-7 k=0.56 电流曲线图图 5-8 k= 2.5 转速曲线图图 5-9 k= 30 转速曲线图图 5-10 闭环比例积分控制直流调速系统仿真模型图图 5-11 PI 控制转速 n 曲线图图 5-12 PI 控制电流曲线图在闭环比例积分( PI )控制下,可以实现对系统无静差调节,即, 提高了系统的稳定性。
电力拖动自动控制系统Matlab仿真实验报告模板

电力拖动自动控制系统Matlab仿真实
验报告
电力拖动自动控制系统
---Matlab仿真实验报告
实验一二极管单相整流电路一.【实验目的】
1.经过对二极管单相整流电路的仿真,掌握由电路原理图转换成仿真电路的基本知识;
2.经过实验进一步加深理解二极管单向导通的特性。
图1-1 二极管单相整流电路仿真模型图
二.【实验步骤和内容】
1.仿真模型的建立
①打开模型编辑窗口;
②复制相关模块;
③修改模块参数;
④模块连接;
2.仿真模型的运行
①仿真过程的启动;
②仿真参数的设置;
3.观察整流输出电压、电流波形并作比较,如图1-2、1-3、1-4所示。
三.【实验总结】
由于负载为纯阻性,故输出电压与电流同相位,即波形相同,但幅值不等,如图1-4所示。
图1-2 整流电压输出波形图图1-3 整流电流输出波形图
图1-4 整形电压、电流输出波形图
实验二三相桥式半控整流电路
一.【实验目的】
1.经过对三相桥式半控整流电路的仿真,掌握由电路原理图转换成仿真电路的基本知识;
2.研究三相桥式半控整流电路整流的工作原理和全过程。
二.【实验步骤和内容】
1.仿真模型的建立:打开模型编辑窗口,复制相关模块,修改模块
参数,模块连接。
2.仿真模型的运行;仿真过程的启动,仿真参数的设置。
相应的参数设置:
(1)交流电压源参数U=100 V,f=25 Hz,三相电源相位依次延迟120°。
《电力拖动与控制系统》课程设计-异步电机矢量控制Matlab仿真实验
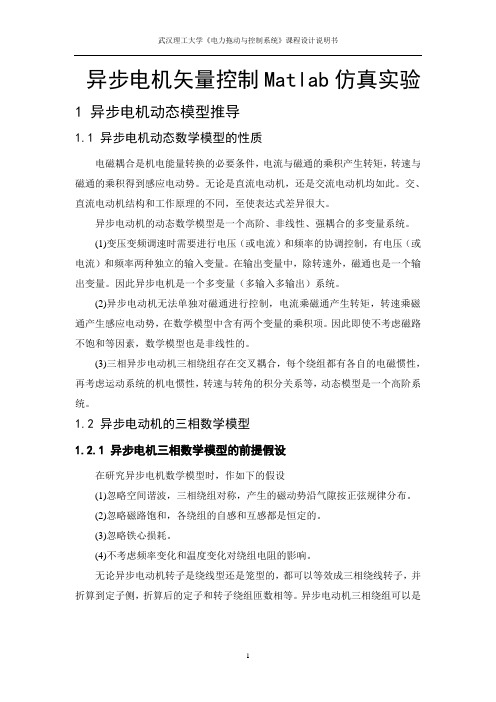
异步电机矢量控制Matlab仿真实验1 异步电机动态模型推导1.1 异步电机动态数学模型的性质电磁耦合是机电能量转换的必要条件,电流与磁通的乘积产生转矩,转速与磁通的乘积得到感应电动势。
无论是直流电动机,还是交流电动机均如此。
交、直流电动机结构和工作原理的不同,至使表达式差异很大。
异步电动机的动态数学模型是一个高阶、非线性、强耦合的多变量系统。
(1)变压变频调速时需要进行电压(或电流)和频率的协调控制,有电压(或电流)和频率两种独立的输入变量。
在输出变量中,除转速外,磁通也是一个输出变量。
因此异步电机是一个多变量(多输入多输出)系统。
(2)异步电动机无法单独对磁通进行控制,电流乘磁通产生转矩,转速乘磁通产生感应电动势,在数学模型中含有两个变量的乘积项。
因此即使不考虑磁路不饱和等因素,数学模型也是非线性的。
(3)三相异步电动机三相绕组存在交叉耦合,每个绕组都有各自的电磁惯性,再考虑运动系统的机电惯性,转速与转角的积分关系等,动态模型是一个高阶系统。
1.2 异步电动机的三相数学模型1.2.1 异步电机三相数学模型的前提假设在研究异步电机数学模型时,作如下的假设(1)忽略空间谐波,三相绕组对称,产生的磁动势沿气隙按正弦规律分布。
(2)忽略磁路饱和,各绕组的自感和互感都是恒定的。
(3)忽略铁心损耗。
(4)不考虑频率变化和温度变化对绕组电阻的影响。
无论异步电动机转子是绕线型还是笼型的,都可以等效成三相绕线转子,并折算到定子侧,折算后的定子和转子绕组匝数相等。
异步电动机三相绕组可以是Y连接,也可以是Δ连接。
若三相绕组为Δ连接,可先用Δ—Y变换,等效为Y 连接。
然后,按Y连接进行分析和设计。
三相异步电机的物理模型如下图1所示,定子三相绕组轴线A、B、C在空间是固定的,转子绕组轴线a、b、c随转子以角转速w旋转。
图1 三相异步电动机的物理模型1.2.2 异步电机的三相动态模型的数学表达式异步电动机的动态模型由磁链方程、电压方程、转矩方程和运动方程组成。
电力拖动自动控制系统Matlab仿真实验报告
电力拖动自动控制系统---Matlab仿真实验报告实验一二极管单相整流电路一.【实验目的】1.通过对二极管单相整流电路的仿真,掌握由电路原理图转换成仿真电路的基本知识;2.通过实验进一步加深理解二极管单向导通的特性。
图1-1二极管单相整流电路仿真模型图二.【实验步骤和内容】1.仿真模型的建立1打开模型编辑窗口;2复制相关模块;3修改模块参数;4模块连接;2.仿真模型的运行1仿真过程的启动;2仿真参数的设置;3.观察整流输出电压、电流波形并作比较,如图1-2、1-3、1-4所示。
三.【实验总结】由于负载为纯阻性,故输出电压与电流同相位,即波形相同,但幅值不等,如图1-4所示。
图1-2整流电压输出波形图图1-3整流电流输出波形图图1-4整形电压、电流输出波形图实验二三相桥式半控整流电路一.【实验目的】1.通过对三相桥式半控整流电路的仿真,掌握由电路原理图转换成仿真电路的基本知识;2.研究三相桥式半控整流电路整流的工作原理和全过程。
二.【实验步骤和内容】1.仿真模型的建立:打开模型编辑窗口,复制相关模块,修改模块参数,模块连接。
2.仿真模型的运行;仿真过程的启动,仿真参数的设置。
相应的参数设置:(1)交流电压源参数U=100V,f=25Hz,三相电源相位依次延迟120°。
(2)晶闸管参数Rn=0.001Ω,Lon=0.0001H,Vf=0V,Rs=50Ω,Cs=250e-6F。
(3)负载参数R=10Ω,L=0H,C=inf。
(4)脉冲发生器的振幅为5V,周期为0.04s(即频率为25Hz),脉冲宽度为2。
图2-1三相桥式半控整流电路仿真模型图当α=0°时,设为0.0033s,0.0166s,0.0299s。
图2-2α=0°整流输出电压等波形图当α=60°时,触发信号初相位依次设为0.01s,0.0233s,0.0366s。
图2-3α=60°整流输出电压等波形图三.【实验总结】三相可控整流电路中,最基本的是三相半波可控整流电路,应用最为广泛的是三相桥式全控整流电路、双反星形可控整流电路以及十二脉波可控整流电路等,均可在三相半波的基础上进行分析。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
电机拖动控制系统MATLAB仿真
例二 转Байду номын сангаас电流双闭环直流调速系统仿真(两种方法对比)
方法一基于动态结构图的方法
转速电流双闭环直流调速系统动态结构图:
电机拖动控制系统MATLAB仿真
例二 转速电流双闭环直流调速系统仿真(两种方法对比)
转速电流双闭环直流调速系统仿真模型
电机拖动控制系统MATLAB仿真
例一 异步电动机的仿真
异步电动机的仿真
电机拖动控制系统MATLAB仿真
例一 异步电动机的仿真
仿真系统搭建
电机拖动控制系统MATLAB仿真
例一 异步电动机的仿真
仿真系统中 3/2变换模块 (子系统) 的搭建
电机拖动控制系统MATLAB仿真
例一
2/3变换模块
异步电动机的仿真
异步电动机的仿真
电机拖动控制系统MATLAB仿真
例一 异步电动机的仿真
仿真参数设置
电机拖动控制系统MATLAB仿真
例一
Step的设置
异步电动机的仿真
电机拖动控制系统MATLAB仿真
例一 异步电动机的仿真
仿真结果
电机拖动控制系统MATLAB仿真
例二 转速电流双闭环直流调速系统仿真(两种方法对比)
电机拖动控制系统MATLAB仿真
例二 转速电流双闭环直流调速系统仿真(两种方法对比) 方法二:simpowersys模块实现
MATLAB仿真
例三 单相电流滞环逆变电路(参数一)
MATLAB仿真
例三 单相电流滞环逆变电路(参数一)
MATLAB仿真
例三 单相电流滞环逆变电路(参数一)
MATLAB仿真
电机拖动控制系统MATLAB仿真
例一
Ac motor 模块的搭建
异步电动机的仿真
电机拖动控制系统MATLAB仿真
例一
参数设置:以Gain13为例: 参数设置为Lm/Lr/Tr, 其中的Lm、Lr、Tr 在MATLAB命令窗口 输入。 》 Rs=1.85; 》 Rr=2.658; 》 Ls=0.2941; 》 Lr=0.2898; 》 Lm=0.2838; 》 J=0.1284; 》 np=2; 》 Tr=Lr/Rr; 》 Rt=(Rs*Lr+Rr*Ls)/Lr; 》 lm=0.2838; 》Cgm=1-Lm*Lm/Ls/Lr;
MATLAB仿真
例三 单相电流滞环逆变电路(参数二)
MATLAB仿真
例三 单相电流滞环逆变电路(参数二)
MATLAB仿真
例三 单相电流滞环逆变电路(参数二)
MATLAB仿真
例四 三相电压型SPWM逆变电路
例三 单相电流滞环逆变电路(参数一)
误差及 两个 开关信号
MATLAB仿真
例三 单相电流滞环逆变电路(参数一)
输出电流 及电压波形
MATLAB仿真
例三 单相电流滞环逆变电路(参数二)
电机拖动控制系统MATLAB仿真
例三 单相电流滞环逆变电路(参数二)
MATLAB仿真
例三 单相电流滞环逆变电路(参数二)