Vicon_动作分析系统
外加膝关节辅助力矩对下肢关键肌群肌力的影响分析
第43卷㊀第2期2024年㊀4月北京生物医学工程BeijingBiomedicalEngineeringVol 43㊀No 2April㊀2024㊃论㊀著㊃基金项目:载人航天工程航天医学实验领域项目(HYZHXM01003)㊁中央高校基本科研业务费专项资金(D5000220188)资助作者单位:1㊀西北工业大学生命学院(西安㊀710072)2㊀空间生物实验模拟技术国防重点学科实验室(西安710072)通信作者:杨鹏飞㊂E⁃mail:yangpf@nwpu edu cn外加膝关节辅助力矩对下肢关键肌群肌力的影响分析王凡杰1,2㊀梁雯琦1,2㊀赵文瑞1,2㊀樊澳1,2㊀侯宏杰1,2㊀杨鹏飞1,2摘㊀要㊀目的以减小步行时的膝关节合力为目标,基于受试者在正常步行状态下的膝关节合力和膝关节力矩,计算解析减少不同程度的膝关节合力所需的辅助力矩,并研究多种步速下辅助力矩对下肢关键肌群肌力的影响规律㊂方法通过三维光学动作捕捉系统及测力台采集人体在慢速步速㊁正常步速以及快速步速下的运动学和动力学数据㊂基于OpenSim生物力学计算平台计算下肢关键肌群肌力㊁膝关节合力及膝关节力矩,然后将膝关节合力按照减少5%㊁10%㊁15%㊁20%的目标进行等比缩减,在MATLAB中采用全局优化算法计算得到辅助力矩,最后分析辅助力矩对下肢关键肌群的影响规律㊂结果辅助力矩随膝关节合力减少的程度而增加,并且不同步速下辅助力矩的平均相关系数为0 87,最高相关系数为0 96㊂施加辅助力矩后,腘绳肌㊁股四头肌㊁腓肠肌的肌力分别在支撑相初期㊁支撑相中期㊁支撑相末期和预摆期减少的平均比例最大,并且在慢速步速下上述三个肌群肌力减少的平均比例最大,其值分别为31%㊁26%和23%㊂结论膝关节辅助力矩主要通过减弱下肢关键肌群的肌力来减少膝关节合力㊂本研究的结果提示不同步速下对膝关节施加特定幅度和变化趋势的辅助力矩,能够达到防止膝关节过载损伤等目的,可为主动机械外骨骼等辅助设备的驱动策略提供数据参考㊂关键词㊀步行;膝关节合力;肌力;辅助力矩;外骨骼DOI:10 3969/j.issn.1002-3208 2024 02 001.中图分类号㊀R318 01㊀㊀文献标志码㊀A㊀㊀文章编号㊀1002-3208(2024)02-0111-07本文著录格式㊀王凡杰,梁雯琦,赵文瑞,等.外加膝关节辅助力矩对下肢关键肌群肌力的影响分析[J].北京生物医学工程,2024,43(2):111-117.WANGFanjie,LIANGWenqi,ZHAOWenrui,etal.Influenceoftheassistivetorqueofkneejointonthestrengthoflowerlimbmuscles[J].BeijingBiomedicalEngineering,2024,43(2):111-117.InfluenceoftheassistivetorqueofkneejointonthestrengthoflowerlimbmusclesWANGFanjie1,2,LIANGWenqi1,2,ZHAOWenrui1,2,FANAo1,2,HOUHongjie1,2,YANGPengfei1,21㊀SchoolofLifeSciences,NorthwesternPolytechnicalUniversity,Xi an㊀710072;2㊀KeyLaboratoryforSpaceBioscienceandBiotechnology,Xi an㊀710072Correspondingauthor:YANGPengfei(E⁃mail:yangpf@nwpu edu cn)ʌAbstractɔ㊀ObjectiveAimingtoreducethekneejointforceduringwalking,therequiredassistivetorquewasassessedbasedonthecalculatedkneejointforceandtorqueofsubjectsduringnormalwalking.Theeffectoftheassistivetorqueonlowerlimbmusclestrengthduringdifferentwalkingspeedswasinvestigated.MethodsThekinematicsandkineticsdataofhumansubjectsatthreewalkingspeedswerecollectedbyusing3Dopticalmotioncapturesystemandforceplates.Thekneejointforce,kneejointtorqueandlowerlimbmusclestrengthwerecalculatedbasedonOpenSimbiomechanicssoftware.TheassistivetorquewascalculatedbyusingtheglobaloptimizationalgorithminMATLABandusedtoachievethepurposeofreducingkneejointforceby5%,10%,15%and20%,repectively.Theinfluenceoftheassistivetorqueonthelowerlimbmuscleactivitieswasanalyzed.ResultsTheassistivetorqueincreasedwiththedecreaseofkneejointforce,andtheaveragecorrelationcoefficientofassistivetorqueatdifferentwalkingspeedwas0.87,andthehighestcorrelationcoefficientwas0 96.Afterapplyingtheassistivetorque,musclestrengthofhamstring,quadricepsfemorisandgastrocnemiusdecreasedthemostintheearly,middle,lateandpre⁃swingphases.Theaverageratioofmusclestrengthofthethreemusclegroupsdecreasedthemostattheslowspeed,withthedecreaseof31%,26%and23%,respectively.ConclusionsAssistivetorqueofkneejointmainlyreducestheresultantforceofkneejointbydecreasingthelowerlimbmusclestrength.Itisthereforesuggestedthattheassistivekneejointtorquewithsuitableamplitudeandprofilemightbeoneofthesolutionstopreventthekneejointoverload.Furthermore,itprovidesinsightsonthedrivingstrategyofassistiveequipmentsuchasactivemechanicalexoskeleton.ʌKeywordsɔ㊀gait;kneejointforce;muscleforce;assistivetorque;exoskeleton0㊀引言长时或瞬时力学过载是导致承重关节损伤的重要因素之一㊂以膝关节为例,正常人行走时膝关节承受约2 3倍于体质量的力学载荷[1-2],下楼梯时承力达体质量的3 5倍[3]㊂适度的载荷对维持骨关节正常结构和功能都十分必要,但异常载荷则会增加骨关节损伤的风险,导致骨关节炎等临床症状[4]㊂因此,如何在多运动场景下减少步态中的肌肉活动进而减轻承重关节的力学载荷,并进行针对性的损伤防护具有重要的临床意义㊂主动和被动外骨骼等辅助设备已经开始用于损伤防护和康复训练[5-8],利用外骨骼等辅助设备减小承重关节的力学载荷已成为当前研究的前沿方向[9]㊂在外骨骼的辅助下,膝关节伸肌肌群的激活度以及产生的力矩明显减少[10-12]㊂McLain等[10]通过研究膝关节外骨骼辅助力矩对股胫接触力的影响发现,在外骨骼辅助作用下膝关节力矩减少了28%,且膝关节伸肌肌群的活动度减少了约15%,进而其肌力减少了20%,导致平均股胫接触力减少了9%,表明了外骨骼辅助在减少膝关节载荷中的重要作用㊂但上述部分研究只在支撑相前期施加固定的辅助力矩,并未根据人体的关节力矩进行辅助力矩优化,且未明确指出不同的辅助力矩与肌力之间的关系㊂针对外骨骼控制策略的研究表明,当外骨骼提供辅助力矩时,使用者会调节其肌肉激活模式以保持肌肉对关节的力矩和辅助力矩的总和在步态周期内保持不变[13-14],故而外骨骼的控制器通常基于使用者关节力矩来定义辅助力矩[15],以保证辅助力矩在方向和振幅上与肌肉的机械作用一致[16]㊂目前外骨骼等辅助设备需要产生何种辅助力矩,辅助力矩如何影响肌群活动进而减小关节力学载荷的过程和规律仍是研究的重点㊂为此,本研究以减小步行时的膝关节合力为目标,基于受试者的膝关节合力和膝关节力矩求解辅助力矩,研究了多种步速下施加不同辅助力矩后对下肢关键肌群肌力的影响,为外骨骼等辅助设备减小膝关节载荷的控制策略研究提供了模拟数据㊂1㊀研究对象与方法1 1㊀研究对象本研究招募3名男性受试者作为研究对象,年龄(23ʃ3)岁,体质量(60ʃ5)kg,身高(174ʃ8)cm,受试者身体健康状况良好,无肌肉骨骼损伤且无影响步态的疾病,并在试验开始前受试者自愿填写书面知情同意书㊂1 2㊀试验方法试验采用三维光学动作捕捉系统(Vicon,OxfordMetricsLimited公司,英国)采集运动学数据,采样率为100Hz;动力学数据采用三维测力台(Optima⁃BMS,AMTI公司,美国)测量,采样率为1000Hz㊂反光标记点固定位置如图1所示㊂㊃211㊃北京生物医学工程㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第43卷图1㊀标记点示意图Figure1㊀Schematicdiagramofmarkedpoints受试者以 T 姿态静止站立在测力台上,检验标记点是否可以全部被识别且无遮挡,采集静态数据并确定反光标记点名称及位置㊂运动数据采集过程中,受试者分别以自选舒适的速度㊁自选较快的速度以及自选较慢的速度步行通过测力台,在这3种步速下各采集30组数据,并在数据预处理阶段对步速进行定义:首先求出受试者在自选舒适速度下所采数据的步速平均值,将该均值ʃ10%之内的步速定义为该受试者的正常步速,高于该均值10% 20%的步速定义为快速步速,低于该均值10% 20%的步速定义为慢速步速,按照对步速的定义从实验采集的3种步速下的数据分别筛选出符合要求的数据各10组㊂1 3㊀基于OpenSim的下肢关键肌群肌力、膝关节合力和力矩的计算㊀㊀OpenSim包含众多的肌肉骨骼计算模型,能够实现神经肌肉骨骼系统的精确模拟,可用于模拟肌肉骨骼动力学和神经肌肉控制,研究人体运动[17-18]㊂将三维光学动作捕捉系统以及测力台采集的数据导入OpenSim人体仿真建模及生物力学分析系统(V4 1,斯坦福大学,美国),选择gait2392模型进行缩放,使模型与受试者相匹配,缩放好的模型可进行逆向运动学和逆向动力学计算,利用肌肉控制计算方法和静态优化算法计算得到下肢关键肌群肌力㊁膝关节合力和膝关节力矩㊂其中肌肉肌力的计算公式为:Ft=FzfL(Lm)fV(̇Lm)a+Fpcosα(1)㊀㊀式中:Ft为肌肉肌力;Fz为肌肉肌腱在激活转态下所能达到的最大等轴力;fL(Lm)为肌肉的收缩力-长度因子;Lm为归一化之后的肌纤维长度;fV(̇Lm)为肌肉的收缩力-速度因子;̇Lm为归一化之后的肌纤维收缩速度;a为肌肉的激活度;Fp为由于拉伸而产生的肌肉被动力,其与标准化肌肉纤维长度有关;α为肌肉的羽状角㊂OpenSim中计算膝关节合力时将下肢简化为刚体模型(图2),其中:股骨Si-1㊁胫骨Si以及脚踝Si+1, FGRF为地面反作用力,为求得膝关节合力,对膝关节处力学平衡进行计算:Fi= Fmuscle+ Fi+1+Mi g+Mi ai(2)㊀㊀式中:Fi为膝关节合力;Mi ai为胫骨运动产生的加速度惯性力; Fi+1为踝关节处距骨与胫骨的作用力; Fmuscle为肌肉收缩力产生的对胫骨的作用力;Mi g为重力㊂A为人体下肢肌肉骨骼模型;B为人体下肢刚体模型;C为胫骨受力图㊂图2㊀人体下肢刚体模型及受力分析图Figure2㊀Rigidbodymodelandforceanalysisdiagramofhumanlowerextremities1 4㊀膝关节外加辅助力矩的确定本研究拟通过外骨骼对关节施加辅助力矩以减小关节力学载荷,同时研究辅助力矩对下肢关键肌群活动的影响规律㊂因此试验设计中首先将膝关节合力按等比缩减的方法分别减少5%㊁10%㊁15%㊁20%,得到了预期的膝关节合力,并假设运动学数据不变且计算模型只改变对膝关节弯曲/伸展相关的肌肉激活度,而对其他肌肉无影响㊂根据等比缩减得到的膝关节合力,在MATLAB(R2021b,MathWork,美国)计算平台上依次求解,采用其全局优化工具箱中的全局搜索算法,将OpenSim求得的步行中的膝关节合力㊁力矩㊁肌肉肌力和肌肉激活度等数据作为输入,多次调用fmincon函数,以原有㊃311㊃第2期㊀㊀㊀㊀㊀㊀王凡杰,等:外加膝关节辅助力矩对下肢关键肌群肌力的影响分析的肌肉激活度为起点,求解新的肌肉激活度,在此基础上基于式(1)得到减少膝关节合力后的肌肉肌力,进而计算得到肌肉对关节的转动力矩,为了保持膝关节净转动力矩不变,本研究将OpenSim与MATLAB先后求得的肌肉对关节转动力矩的差值作为辅助力矩,并分析了施加辅助力矩前后膝关节关键屈伸肌肌力的变化规律㊂辅助力矩计算流程见图3㊂图3㊀辅助力矩计算流程图Figure3㊀Flowchartforcalculatingassistivetorque1 5㊀数据处理及统计分析辅助力矩根据受试者体质量进行归一化处理,结果表示为辅助力矩与体质量的比值㊂为了研究辅助力矩对肌群肌力的影响,施加辅助力矩前后的肌群肌力比值用于表示肌群肌力的变化程度㊂用相关系数来评估不同步速下辅助力矩的相似度,将3种步速下减少相同膝关节合力得到的辅助力矩平均值两两计算得到相关系数,相关系数的绝对值越接近1说明曲线相似,越接近0表示完全不相关㊂2㊀结果与分析2 1㊀辅助力矩不同步速下的辅助力矩如图4所示,辅助力矩随膝关节合力的减少而增加,其在支撑相前期先减小后快速增加,在支撑相中期保持稳定,而在支撑相末期先迅速上升后急速下降㊂通过对比正常步速4个目标下的辅助力矩发现,辅助力矩的最大值依次递增,其结果分别为0 13Nm/kg㊁0 26Nm/kg㊁0 41Nm/kg㊁0 52Nm/kg㊂慢速与快速步行时,辅助力矩曲线轮廓与正常步速下的轮廓接近㊂由于辅助力矩代替了部分肌肉功能对膝关节施加伸屈力A㊁B㊁C㊁D分别为以膝关节合力减少5%㊁10%㊁15%㊁20%为目标求得的3种步速下的辅助力矩㊂图4㊀不同速度下的辅助力矩Figure4㊀Assistivetorqueatdifferentspeeds㊃411㊃北京生物医学工程㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第43卷矩,使下肢关键肌群肌力减小,辅助力矩越大,下肢关键肌群肌力减少的程度越高,膝关节合力减少的比例越高㊂不同步速下辅助力矩的平均相关系数为0 87,最高相关系数为0 96,表明为减少同等程度膝关节合力而施加的辅助力矩并不会因步速而产生较大的差异㊂2 2㊀辅助力矩作用时不同步速下的肌肉肌力变化辅助力矩作用时,腘绳肌㊁股四头肌㊁腓肠肌的肌力分别在支撑相初期㊁支撑相中期㊁支撑相末期和预摆期减小的比例最高;肌群肌力减少的比例随辅助力矩的增加而增加,且肌力变化最大的时间段正是该肌群在无辅助状态下肌力显著增大的时期(图5)㊂3个肌群在不同步速下肌力减小比例的平均值统计结果(表1㊁表2和表3)表明:在辅助力矩作用下,慢速步速下腘绳肌㊁股四头肌和腓肠肌的肌力减少的平均比例最大,其值分别为31%㊁26%和23%㊂3㊀讨论本研究基于正常步行中的膝关节合力和力矩,计算获得辅助力矩,研究了多种步速下辅助力矩对下肢关键肌群肌力的影响规律㊂结果表明,随着辅助力矩的增加,下肢关键肌群肌力减少的比例与支撑相内对肌力影响的时长均大幅度增加;辅助力矩图5㊀不同步速下的肌肉变化Figure5㊀Musclechangeswhenwalkingatdifferentspeeds㊃511㊃第2期㊀㊀㊀㊀㊀㊀王凡杰,等:外加膝关节辅助力矩对下肢关键肌群肌力的影响分析表1㊀施加辅助力矩后腘绳肌在支撑相前10%肌力减少比例的平均值Table1㊀Theaveragereductionratioofhamstringmusclestrengthinthefirst10%ofthesupportphaseafterapplyingassistivetorque目标减少值/%慢速正常快速P521%ʃ6%13%ʃ3%13%ʃ6%0 181027%ʃ6%19%ʃ4%16%ʃ2%0 091534%ʃ7%26%ʃ4%21%ʃ0%0 092040%ʃ8%33%ʃ4%27%ʃ1%0 14表2㊀施加辅助力矩后股四头肌在支撑相11% 55%肌力减少比例的平均值Table2㊀Theaveragereductionratioofquadricepsmusclestrengthat11%to55%ofthesupportphaseafterapplyingassistivetorque目标减少值/%慢速正常快速P57%ʃ1%7%ʃ1%15%ʃ1%0 002∗∗1018%ʃ2%14%ʃ4%19%ʃ6%0 41533%ʃ4%26%ʃ5%28%ʃ6%0 32047%ʃ5%36%ʃ5%36%ʃ6%0 09注:∗∗为P<0.01㊂表3㊀施加辅助力矩后腓肠肌在支撑相56% 80%肌力减少比例的平均值Table3㊀Theaveragereductionratioofgastrocnemiusmusclestrengthat56%to80%ofthesupportphaseafterapplyingassistivetorque目标减少值/%慢速正常快速P54%ʃ0%4%ʃ1%5%ʃ4%0 921017%ʃ1%15%ʃ0%9%ʃ3%0 004∗∗1530%ʃ3%27%ʃ1%18%ʃ1%0 003∗∗2041%ʃ4%36%ʃ2%28%ʃ1%0 009∗∗注:∗∗为P<0.01㊂的作用时,腘绳肌㊁股四头肌和腓肠肌的肌力在慢速步速下减少的比例最高,表明慢速步速下的辅助效果最好㊂此外,辅助力矩在支撑相内的变化趋势不随步行速度而改变,提示在不同步速下,可以使用相同的辅助力矩来驱动外骨骼等辅助设备,为外骨骼等辅助设备的控制策略提供了数据参考㊂在负重快速步行时,由于需要更大的肌力来平衡地面反作用力,膝关节合力也会因此而增加[19]㊂Zhang等[20]通过构建包含膝关节外骨骼的虚拟人机系统,研究了不同的辅助策略对受试者关节接触力的影响,发现施加不同辅助力矩之后,膝关节处股骨和胫骨的接触力在支撑相几乎没有变化,这也从侧面证明外骨骼等辅助设备施加的辅助力矩主要对肌群活动产生影响㊂由于下肢关键肌群的肌力是膝关节合力的最主要的组成部分,当施加辅助力矩后可有效减少下肢关键肌群的肌力进而减少膝关节合力㊂外骨骼进行辅助时,使用者的肌肉激活模式会根据辅助力矩进行动态适应以最大化地利用辅助力矩㊂若辅助是有效的,使用者的动态适应过程会降低步行时的肌力,减少肌肉疲劳,进而防止关节损伤㊂因此透彻理解人类对于辅助力矩的适应过程是设计高效的辅助装置的基础[21]㊂本研究基于正常步行中膝关节合力和力矩,计算获得辅助力矩来研究不同辅助力矩对下肢关键肌群肌力的影响规律㊂本文基于OpenSim和MATLAB计算平台,研究了辅助力矩对下肢关键肌群肌力的影响规律,然而,本研究所采用的辅助力矩计算方法仍存在一定的局限性㊂本研究假设在施加辅助力矩前后关节角度等运动学数据没有改变,根据Lee等[11]的研究结果可知,施加辅助前后的关节角度曲线趋势非常相似,并且不同的辅助条件对关节角度影响并不大㊂此外,本研究聚焦在下肢部分肌群,将来可以将研究进一步拓展至比目鱼肌等更多参与步态的肌群㊂4㊀结论本文通过研究辅助力矩对下肢关键肌群肌力的影响规律发现,在不同步速下对膝关节施加特定幅度和变化趋势的辅助力矩,可以有效减少下肢关键肌群的肌力,能够降低膝关节合力进而防止膝关节过载损伤㊂在不同步速下,可以使用相同的辅助力矩来达到减少同等程度膝关节合力的目标,可为主动机械外骨骼等辅助设备的驱动策略提供数据参考㊂参考文献[1]㊀ThambyahA,PereiraBP,WyssU.Estimationofbone⁃on⁃bone㊃611㊃北京生物医学工程㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第43卷contactforcesinthetibiofemoraljointduringwalking[J].TheKnee,2005,12(5):383-388.[2]㊀SasakiK,NeptuneRR.Individualmusclecontributionstotheaxialkneejointcontactforceduringnormalwalking[J].JournalofBiomechanics,2010,43(14):2780-2784.[3]㊀KutznerI,HeinleinB,GraichenF,etal.Loadingofthekneejointduringactivitiesofdailylivingmeasuredinvivoinfivesubjects[J].JournalofBiomechanics,2010,43(11):2164-2173.[4]㊀GriffinTM,GuilakF.Theroleofmechanicalloadingintheonsetandprogressionofosteoarthritis[J].ExerciseandSportSciencesReviews,2005,33(4):195-200.[5]㊀YangW,ZhangJ,ZhangS,etal.Lowerlimbexoskeletongaitplanningbasedoncrutchandhuman⁃machinefootcombinedcenterofpressure[J].Sensors,2020,20(24):7216.[6]㊀TanK,KoyamaS,SakuraiH,etal.Wearableroboticexoskeletonforgaitreconstructioninpatientswithspinalcordinjury:aliteraturereview[J].JournalofOrthopaedicTranslation,2021,28:55-64.[7]㊀WeeSK,HoCY,TanSL,etal.Enhancingqualityoflifeinprogressivemultiplesclerosiswithpoweredroboticexoskeleton[J].MultipleSclerosis,2021,27(3):483-487.[8]㊀NolanKJ,KarunakaranKK.Roboticexoskeletongaittrainingduringacutestrokeinpatientrehabilitation[J].FrontiersinNeurorobotics,2020,14:581815.[9]㊀MedranoRL,RouseEJ,ThomasGC.Biologicaljointloadingandexoskeletondesign[J].IEEETransactionsonMedicalRoboticsandBionics,2021,3(3):847-851.[10]㊀McLainBJ,LeeD,MulrineSC,etal.Effectofassistanceusingabilateralrobotickneeexoskeletonontibiofemoralforceusinganeuromuscularmodel[J].AnnalsofBiomedicalEngineering,2022,50(6):716-727.[11]㊀LeeD,McLainBJ,KangI,etal.Biomechanicalcomparisonofassistancestrategiesusingabilateralrobotickneeexoskeleton[J].IEEETransactionsonBiomedicalEngineering,2021,68(9):2870-2879.[12]㊀LeeD,KwakEC,McLainBJ,etal.Effectsofassistanceduringearlystancephaseusingarobotickneeorthosisonenergetics,muscleactivity,andjointmechanicsduringinclineanddeclinewalking[J].IEEETransactionsonNeuralSystemsandRehabilitationEngineering,2020,28(4):914-923.[13]㊀LewisCL,FerrisDP.Invarianthipmomentpatternwhilewalkingwitharobotichipexoskeleton[J].JournalofBiomechanics,2011,44(5):789-793.[14]㊀SawickiGS,FerrisDP.Poweredankleexoskeletonsrevealthemetaboliccostofplantarflexormechanicalworkduringwalkingwithlongerstepsatconstantstepfrequency[J].JournalofExperimentalBiology,2009,212(Pt1):21-31.[15]㊀KongK,TomizukaM.Controlofexoskeletonsinspiredbyfictitiousgaininhumanmodel[J].IEEE/ASMETransactionsonMechatronics,2009,14(6):689-698.[16]㊀LenziT,CarrozzaMC,AgrawalSK.Poweredhipexoskeletonscanreducetheuser shipandanklemuscleactivationsduringwalking.IEEETransactionsonNeuralSystemsandRehabilitationEngineering,2013,21(6):938-948.[17]㊀DelpSL,AndersonFC,ArnoldAS,etal.OpenSim:open⁃sourcesoftwaretocreateandanalyzedynamicsimulationsofmovement[J].IEEETransactionsonBiomedicalEngineering,2007,54(11):1940-1950.[18]㊀SethA,HicksJL,UchidaTK,etal.OpenSim:simulatingmusculoskeletaldynamicsandneuromuscularcontroltostudyhumanandanimalmovement[J].PLoSComputationalBiology,2018,14(7):e1006223.[19]㊀LentonGK,BishopPJ,SaxbyDJ,etal.Tibiofemoraljointcontactforcesincreasewithloadmagnitudeandwalkingspeedbutremainalmostunchangedwithdifferenttypesofcarriedload[J].PLoSOne,2018,13(11):e0206859.[20]㊀ZhangL,LiuY,WangR,etal.Modelingandsimulationofahumankneeexoskeleton sassistivestrategiesandinteraction[J].FrontiersinNeurorobotics,2021,15:620928.[21]㊀FerrisDP,SawickiGS,DaleyMA.Aphysiologist sperspectiveonroboticexoskeletonsforhumanlocomotion[J].InternationalJournalofHumanoidRobotics,2007,4(3):507-528.(2022-09-05收稿,2023-01-20修回)㊃711㊃第2期㊀㊀㊀㊀㊀㊀王凡杰,等:外加膝关节辅助力矩对下肢关键肌群肌力的影响分析。
低成本全功能工业级动作捕捉系统

低成本全功能工业级动作捕捉系统我们工作室创建于2009年,主要从事各种角色动画开发工作,在各种工作流程应用使用过程中,整合并开发了一套完整的动作捕捉技术流程系统以及对应的实际各种应用方法,这套系统适合各种角色动画生产线的使用,使传统工作流程的工作效率提升了数十倍,不但在大大节省各种人力物力的同时,也大大降低了整个项目开发的应用成本,比如高清游戏的动角色画项目,卡通动画连续剧的卡通角色动画的生产,以至于高端电影VFX特效的应用使用,动作捕捉技术在节省各种成本的同时,也使得各种项目的生产质量飞跃到一个空前华丽真实震撼的水平。
大家知道,3D捕捉一直被认为是CG业界的高端领域,同时也被认为是隶属于高科技范围的高成本高端技术行列,所以,也就一直是有一定实力的大公司才有实力购买拥有的设备。
而这个技术范围内最著名的捕捉设备系统就是老牌的英国VICON公司以及美国的MOTIONANALYSIS捕捉公司等等,VCION公司的业务范围很广泛,当然对于我们CG技术应用范围来说,最熟悉的就是VICON的3D运动捕捉系统VICON的设备可谓是大名鼎鼎,名扬天下,当然是对CG影视的业界以及军事科技体育医疗等相关领域而言,尤其是被老美HOLLYWOOD电影工业应用生产出来的成堆大片3D作品栩栩如生,千变万幻,手KEY的动画再好也就是顶多最后能调整的更流畅一些,如果是高仿真的电影特效动作,手KEY几乎无法实现,即便是动画卡通片,再短小的动作都需要花费海量的时间去反复的调整完成细节,这也是大多的动画公司人员工员数众多的缘故。
但如果有了自己随心所欲的全功能运动捕捉技术,制作角色表情身体动画的信心将会爆增,效率也将成数倍速度增长,他可以大量节省动画师的手KEY时间,不但大大加快工程作品的出炉速度,并且让3D、2D角色动画可以不再分心,完全专注于创作,随心所欲,任意驰骋,获得彻底的解放。
并且大大增强自身的技术信心,让您的公司进一步扩大市场范围,进军高端领域成为可能!它适合任何相关行业,比如承接电影、电视特效工作室,广告公司,电影级建筑漫游,专业制作3D、2D动画动漫公司,大小游戏开发公司等等,而且更能为您节省大量的人力财力,跨越高端的高墙成为了中小公司实现的可能。
借助Vicon动作捕捉原理,开展“人体动态速写”教学

1前 言 . “ 物 动态 速 写 ” 指 在极 短 的时 间 内画 下 人 物 的 动作 和 人 是 姿 态 , 一 种非 常 重 要 的 造 型艺 术 基 础 。 统 的教 学 方 法 强 调 是 传
运 用 人 体解 剖 知 识 来 捕 捉人 体 的动 态 线 .然 后 利 用 复 杂 的 线
据 这 个 原 理 我们 可 以找 出2 肩关 节 、 个 肘 关 节 、 个 腕 关 节 、 个 2 2 2 个髋 关 节 、 个 膝 关 节 、个 踝 关 节 、 、 和头 部 共 l 个 “ 态 2 2 颈 腰 5 动 点 ” 这 些 动 态点 就 构 成 了 人物 的一 个 基 本架 构 。 ,
在 画 “ ” , 必 考 虑 构 图 , 必 讲究 完 整 效 果 , 点 ” 点 时 不 不 “ 的 大 小 只 要学 生本 人 可 以在 纸 上 能 辨 认 出 来就 行 了 。但 要 注 意 “ ” “ ” 间 的距 离 和 位 置 , 点 与 点 之 因为 人 物 动 态 速 写 中 , 重 要 最 的 就 是 结 构 , 以学 生要 花 多 点 时 间反 复 练 习 . 过 由慢 转 所 通 快 的 练 习 , 牢 记 住 人 物 动 态 的 关 键 点 所 在 , 而 能 在 很 短 牢 从 的 时 间 内 根 据 具 体 的位 置 和 比 例将 这 些 “ 态 点 ” 现 出 来 。 动 表 定 点 快 速 完 成 的特 性 正 好 符 合 学 生 初 期 阶 段 对 绘 画 不 能 深 入 刻 画 、 有 耐 心 的特 点 , 而 增 强 了学 生 的 自信 心 和 学 习 没 从 的兴趣。
和 面 来进 行 “ 动态 速 写 ” 学 生 必 须记 住 很 多 的 概 念 和 知识 点 . 。 在 短 时 间 内很 难 提 高人 物 动 态 速写 水 平 。 V cn i 三维 动 作 捕 捉 系统 利 用 摄 像 机 捕 捉 粘 贴 在 人 物 模 o
VICON动作捕捉教材分析说明

VICON动作捕捉系统培训教材一. VICON动作捕捉系统基本原理及课程简介运动捕捉系统是一种用于准确测量运动物体在三维空间运动状况的高技术设备。
它基于计算机图形学原理,通过排布在空间中的数个视频捕捉设备将运动物体(跟踪器)的运动状况以图象的形式记录下来,然后使用计算机对该图象数据进行处理,得到不同时间计量单位上不同物体(跟踪器)的空间坐标(X,Y,Z)。
该技术在众多的领域中都有十分广泛的应用。
在体育训练中它可以帮助教练员从不同的视角观察运动员的动作,并且将位置、速度、加速度等数据进行量化处理,使教练员能够有的放矢地纠正运动员的技术动作,从而大大提高系列效果;在动画制作上,它可以轻而易举地制作出各种人物、动物的复杂动作,使动画制作流程变得简捷高效;在医学的康复治疗领域,它可以准确测量并记录下需要肢体康复治疗的病人的各种运动数据,同时可以为医生观察、分析病人的运动提供诸多帮助;另外该系统在步态分析、虚拟现实、运动分析、机器人控制等诸多领域都有着将巨大的应用前景。
二.设备软件配置Vicon设备组件、Vicon IQ动作捕捉软件、MotionBuilder动画软件,工作站级电脑两台。
三. 培训大纲培训计划时间为10天,以下是详细安排:项目细目时间交货,安装,调试根据交货单清点货物Vicon组件安装1天2天Camera的安装调试IQ,MotionBuilder软件安装1天培训见后培训大纲7天验收根据验收标准验收1天培训大纲每天上课时间:上午9:30??11:30下午1:30??4:00一、说明1 本培训计划根据《动作捕捉技术标准》职业模块标准制定。
2 本培训计划是贯彻能力导向的主要体现,也是培训能容的设置原则。
加强技能培训,注重实际操作能力的培养。
二、对受训人员的资质要求熟悉会用以下一种软件:Vicon IQ,Workstation ,MotionBuilder , Maya ,3ds三、动作捕捉技术培训内容模块培训内容说明动作捕捉技术动作捕捉技术概论系统讲述动作捕捉技术的发展过程;应用领域;动作捕捉技术的基本原理;动作捕捉制作流程CG动画概论结合动作捕捉技术介绍CG动画的发展过程;应用领域;制作流程动作捕捉系统的操作动作捕捉软件的基本操作方法;进行一般动作的捕捉练习;进行特殊部位的动作捕捉动作捕捉数据的管理;对捕捉数据进行修复和处理;系统功能;动作捕捉系统维护动作捕捉系统的维护、校正动作捕捉数据的处理模型绑定将动作捕捉数据输出到各个CG软件中去,包括一般动作和脸部动作将动作数据绑定到角色模型实时动作捕捉进行实时动作捕捉练习四、设施条件4.1 设施条件动作捕捉系统足够的动作捕捉空间;良好的暗度动作捕捉软件;实时动作捕捉软件;动作捕捉桥梁软件五、培训方式方法建议培训应采用小班制,以4人一班为宜。
基于双任务范式下楼梯行走运动学与动力学特征研究
基于双任务范式下楼梯行走运动学与动力学特征研究作者:何培东来源:《山东体育科技》2020年第06期摘要:目的:探讨认知任务和动作任务对下楼梯过程中运动学和动力学的影响。
方法:选取37名受试者在单任务、认知任务及动作任务条件进行下楼梯行走,并采集运动学和动力学数据。
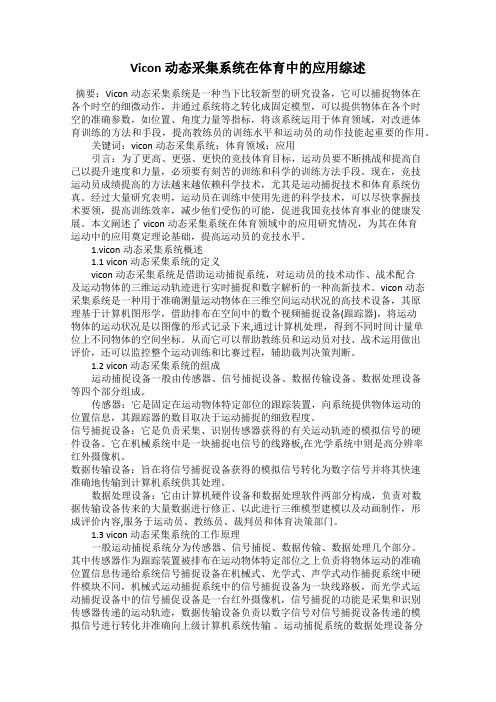
结果:两种双任务状态下的步态特征、负载率、下肢关节力矩和功率与单任务状态相比显着降低。
与认知任务相比,受试者在动作任务下有较低的膝关节屈/伸范围、负载率、髋屈曲力矩峰值、伸膝力矩第一峰值、踝跖屈力矩第一峰值、膝关节功率缓冲第一峰值和较小的步宽。
结论:双重任务对下楼梯行走的运动学和动力学参数有显着影响,进一步的研究可以关注于双任务的复杂程度对楼梯行走过程中生物力学参数的影响。
关键词:双任务;关节力矩;步态;楼梯行走中图分类号:G804.6 文献标识码:A 文章编号:1009-9840(2020)06-0053-04Kinematic and kinetic analysis of downstair walking during dual task paradigmHE Peidong(Shandong Sport University, Jinan 250102, Shandong, China)Abstract:Objective: To investigate the effects of cognitive tasks and action tasks on the kinematics and dynamics of the stairs. Methods: 37 subjects were selected to walk down stairs under single task, cognitive task and action task condition, and the kinematics and dynamics data were collected. Results: The gait characteristics, load rate, lower limb joint torque and power were significantly lower than that of single task state. Compared with cognitive tasks, subjects had lower knee flexion/extension range, load rate, peak hip flexion moment, first peak knee extension moment, first peak ankle plantar flexion moment, first peak of knee power buffer and smaller step width. Conclusion: The double task has a significant influence on the kinematic and dynamic parameters of the stairs. Further research can focus on the influence of the complexity of the two tasks on the biomechanical parameters of the stairs.Key words:dual task; joint moment; gait; stair walking收稿日期:2020-08-10作者简介:何培东(1974- ),男,山东济南人,硕士,讲师,研究方向運动与健康促进。
Vicon动态采集系统在体育中的应用综述
Vicon动态采集系统在体育中的应用综述摘要:Vicon动态采集系统是一种当下比较新型的研究设备,它可以捕捉物体在各个时空的细微动作,并通过系统将之转化成固定模型,可以提供物体在各个时空的准确参数,如位置、角度力量等指标,将该系统运用于体育领域,对改进体育训练的方法和手段,提高教练员的训练水平和运动员的动作技能起重要的作用。
关键词:vicon动态采集系统;体育领域;应用引言:为了更高、更强、更快的竞技体育目标,运动员要不断挑战和提高自己以提升速度和力量,必须要有刻苦的训练和科学的训练方法手段。
现在,竞技运动员成绩提高的方法越来越依赖科学技术,尤其是运动捕捉技术和体育系统仿真。
经过大量研究表明,运动员在训练中使用先进的科学技术,可以尽快掌握技术要领,提高训练效率,减少他们受伤的可能,促进我国竞技体育事业的健康发展。
本文阐述了vicon动态采集系统在体育领域中的应用研究情况,为其在体育运动中的应用奠定理论基础,提高运动员的竞技水平。
1.vicon动态采集系统概述1.1 vicon动态采集系统的定义vicon动态采集系统是借助运动捕捉系统,对运动员的技术动作、战术配合及运动物体的三维运动轨迹进行实时捕捉和数字解析的一种高新技术。
vicon动态采集系统是一种用于准确测量运动物体在三维空间运动状况的高技术设备,其原理基于计算机图形学,借助排布在空间中的数个视频捕捉设备(跟踪器),将运动物体的运动状况是以图像的形式记录下来,通过计算机处理,得到不同时间计量单位上不同物体的空间坐标。
从而它可以帮助教练员和运动员对技、战术运用做出评价,还可以监控整个运动训练和比赛过程,辅助裁判决策判断。
1.2 vicon动态采集系统的组成运动捕捉设备一般由传感器、信号捕捉设备、数据传输设备、数据处理设备等四个部分组成。
传感器:它是固定在运动物体特定部位的跟踪装置,向系统提供物体运动的位置信息,其跟踪器的数目取决于运动捕捉的细致程度。
排球运动扣球起跳和落地动作的髋、膝、踝动力学分析
排球运动扣球起跳和落地动作的髋、膝、踝动力学分析原文惠;吴剑;魏亮【摘要】目的研究排球运动扣球起跳和落地动作时髋、膝、踝的动力学特征.方法采用VICON红外三维动作分析系统、AMTI测力台对9名排球运动员的扣球起跳和落地动作进行拍摄,并对不同方式扣球起跳和落地动作的髋、膝、踝进行动力学分析.结果与结论在不同方式扣球起跳过程中左侧关节受力均大于右侧关节. 在起跳和落地过程中,踝关节在X轴方向起主要作用,髋关节在Y轴上起主要作用,膝关节在Z轴上起主要作用. 排球扣球起跳时,右脚先着地—重心最低点—左脚着地,属于排球起跳动作特有特征. 在排球动作起跳中,右腿主要负责将水平速度转化到垂直方向而后伴随蹬地辅助起跳,左腿则主要负责垂直方向发力起跳.【期刊名称】《湖北体育科技》【年(卷),期】2017(036)012【总页数】5页(P1085-1089)【关键词】排球;起跳;落地;动力学分析【作者】原文惠;吴剑;魏亮【作者单位】中北大学体育学院,山西太原,030051;中北大学体育学院,山西太原,030051;中北大学体育学院,山西太原,030051【正文语种】中文【中图分类】G80-05膝关节损伤是最常见的运动损伤之一,在球类项目中最为常见。
排球运动中的急停、急转、减速、跳跃、落地不稳等会造成膝关节非接触损伤,出现关节外翻、外旋、过伸的损伤。
在损伤部位的构成比中,占首位的是膝关节为43.1%,腰背部、肩关节与踝关节分别为 22.3%、10.4%、7.1%[1]。
在排球运动中膝关节损伤率最高,而在整个扣球阶段对于膝关节的损伤主要集中在起跳和落地阶段。
扣球起跳和落地是排球扣球技术中的重要环节,同时也是排球运动员最容易发生损伤的环节。
扣球是排球比赛胜利的最重要的环节,扣球高度、力量和速度是提高扣球成功率的关键因素,充分的起跳有利于增加扣球效果的攻击性,而在追求扣球高度的同时势必会增大落地时下肢损伤的风险。
排球扣球技术对运动员的腾空高度和在空中的身体平衡能力有很高的要求[2]。
vicon运动采集分析系统 简介
最大像素:1,024,000,000像素/秒
每秒最多可捕捉136000个光球/秒
摄像机精度:0.02像素或1:64,000
传感器灰阶深度:10 bit
摄像机最大可遮隐范围:64x52 individual cells
摄像机滤镜256层
摄像机输出捕捉点圆心灰阶及边缘讯息
连接线自主设计,可整合电源及数据通路
Custo持C-Mount接口以及35mmSLR类型镜头
支持变焦镜头
(C-Mount接口)可选镜头:8.5mm,9mm,12.5mm,25mm, Custom
(35mmSLR)可选镜头:14mm, 17-35mm,20mm,24mm,24mm-70mm, Custom
支持发光器类型:可见红光(623nm),红外线(850nm),近红外线(780nm)
系统中可兼容无数个摄像机
外部高速序列显示界面于摄像机上
具有控制显示界面
连接状态显示功能Tx, Rx, Col
摄像机具有三种状态显示
Genlock to External Video Source:PAL+NTSC+Film
F20红外摄像机包含专门为用户设计的Vicon Vegas CMOS传感器,它提供了真正意义上的定格快门。这样使得照相机可以容许实验室周围的灯光,提高系统的准确性。
特点
摄像机性能参数
VICON Vegas CMOS传感器
传感器分辨率:1600×1280像素
像素最高可达二百万
每秒传输帧数:30-2,000 fps
具有全解析预览输出功能
摄像机镜头具有校正功能
系统软件
系统软件必须是硬件厂商自行开发,具有自主知识产权
Vicon三维运动捕捉系统在人体运动分析中的应用

1 研究 目的
几乎所有的体育运动都由身体动作组成。 奥运会 中的许多项 目成绩的好坏也受肢体动作质量的影响。 以跑步为例 , 符合运动员 自身身体特点以及运动要求的肢体动作 ( 摆臂 、 步频 、 步幅等 ) 不仅能提高短 , 跑运动员的运动成绩 ,也能使参加中长距离运动的运动员降低运动过程中的能量消耗 ,从而有更多的能 量用于最后的冲刺。虽然足球和篮球等运动项 目对跑步动作的规范没有严格要求 ,但同样需要降低跑步
LuoYi e w i
( h agId s y TaeP l eh i Z  ̄i ut & rd oy cnc n n r t
Wez o nh u
Z o ag 3 5 0 h in 2 0 3)
Ab t a t h n l zn e u t fb d p r r up  ̄ d b d b i e d lt r u h t e wa fs o t sr c :T e a a y i g r s l o o y s o s a e o t u e y Bo y u l rmo e h o g h y o p r s t d s c p u e u d rt eVio y t m n i n SS o sL w. d rt e i sr c i n o o c e , i e e tah ee o l a t r n e h c n s se a d N u Du ’ p r a Un e n tu t fc a h s d f r n t ltsc ud t h o
点等 ) 则缺乏系统科学 的研究” 。 虽然文献【 对短跑技术分析包括 了关节运动角度范围等参数 , 3 】 但并没
收稿 H期 :20 —0 —0 07 3 2
作 者简介 :罗逸 苇 (17 一 ) ,硕上 ,讲 师。研究方 向:运动牛物力学。 9 7 ,男
动作捕捉专家Vicon宣布,将在旧金山展示两个新的更新
动作捕捉专家Vicon宣布,将在旧金山展示两个新的
更新
距离2019年游戏开发者大会(GDC)只有一周的时间了,对于虚拟现实(VR)来说,这将是激动人心的一年。
今天,动作捕捉专家Vicon宣布,它将在旧金山展示两个新的更新,一个是基于位置的虚拟现实(LBVR)系统Origin,以及即将推出的动作捕捉技术Shōgun1.3。
Vicon在去年夏天SIGGRAPH期间推出了Origin system,为Dreamscape Immersive和VR Arcade等公司的VR企业提供了完整的跟踪解决方案。
为了展示该系统的最新改进,在GDC 2019期间Vicon将挑战《Shadow Shifter》,这是专为该活动开发的体验。
玩家将成为物理电子游戏的控制者,在这个游戏中,两个参与者必须同时工作来收集硬币。
参与者配备了6个Pulsar活动集群,并由20个Vicon Viper摄像机跟踪,然后玩家需要将自己的体型与展现在他们面前的内容相匹。
动捕建设方案

动捕建设方案引言动作捕捉(Motion Capture),简称动捕,是一种技术,通过感知人体动作并将其转化为数字形式进行处理和存储。
它广泛应用于电影、游戏、体育等领域。
为了实现高质量的动捕效果,需要一套完整的动捕建设方案。
本文将介绍一个可行的动捕建设方案,包含硬件设备和软件工具的选择以及建设流程。
硬件设备选择1. 动作捕捉系统动作捕捉系统是动捕方案的核心。
市面上有各种不同类型的动作捕捉系统,如光学动作捕捉系统、惯性动作捕捉系统和混合动作捕捉系统等。
根据应用场景和需求,选择合适的动作捕捉系统非常重要。
光学动作捕捉系统是指通过摄像机和传感器捕捉人体运动轨迹的系统。
常见的光学动作捕捉系统有Vicon系统、OptiTrack系统等。
它们能够捕捉到高精度的运动数据,适用于制作高品质的电影和游戏。
惯性动作捕捉系统通过佩戴于身体各个关节位置的传感器实现运动数据的采集。
这种系统不受环境光影响,适用于一些特殊环境下的运动捕捉,如体育训练和虚拟现实应用。
混合动作捕捉系统结合了光学和惯性技术,可以既保留光学系统的高精度,又保留惯性系统的独立操作性。
这种系统在一些特定的应用场景中能够发挥更大的作用。
2. 摄像设备在选择动捕系统的同时,还需要选择适合的摄像设备。
摄像设备的选择应考虑成像质量、帧率和可靠性等因素。
常见的选择包括高分辨率的工业相机、专业动作摄像机等。
3. 动作追踪标记物动作追踪标记物用于标记人体关节的位置,以便动作捕捉系统采集到准确的运动数据。
标记物通常是小型的反光球或反光贴片,能够在摄像机的光源下产生明亮的反射,方便系统检测和跟踪。
软件工具选择1. 动作数据处理软件选择一款功能强大的动作数据处理软件是动捕建设的关键。
这类软件包括动画制作软件、游戏开发工具和运动分析工具等。
其中比较常用的软件有MotionBuilder、Maya和Blender等。
这些软件能够对捕捉到的动作数据进行编辑、处理和导出,用于后续的动画制作、游戏开发等工作。
Vicon动作捕捉系统操作手册

图 1-6 摄像机的连接 (3)两个 MX Ultranet HD 盒之间的连接
由于系统使用 12 台摄像机,需要两个 MX Ultranet HD 盒,两个 MX Ultranet HD 盒之 间通过后方中部的“Ultanet Links”接口由网线相连接。
7
Vicon 动作捕捉系统 操作手册
图 1-7 两个 MX Ultranet HD 盒的连接 (4)MX Ultranet HD 盒与 PC 的连接
Vicon 动作捕捉系统 操作手册
Vicon 动作捕捉系统 操作手册
目录
目录 .......................................... 2
1.1 仪器简介...................................................................................................................3 1.2 仪器主要部件............................................................................................................4 1.2.1 硬件设施.................................................................................................................4 1.2.2 硬件的连接..............................................................................................................6 2.1 摄像机设置和采集区域选择.....................................................................................9 2.2 标定...........................................................................................................................17 2.2.1 定位 MX cameras ,使用“Aim MX cameras”选项..........................................17 2.2.2 标定 MX cameras ,使用“Calibrate MX cameras”选项.................................19 2.2.3 设定拍摄区域的原点...........................................................................................23 2.3 数据采集..................................................................................................................25 2.3.1 粘贴标志点及形态学测量...................................................................................25 2.3.1.1 两套方案优缺点比较......................................................................................26 2.3.1.2 注意事项............................................................................................................26 2.3.1.3 操作步骤............................................................................................................26 2.3.2 动作采集.........................................................................................................31 2.3.2.1 建立新的 database............................................................................................31 2.3.2.2 建立静态模型....................................................................................................34 2.3.2.3 采集实验动作....................................................................................................41 3.1 数据的处理.............................................................................................................43 3.2 数据的输出.............................................................................................................50 3.2.1 查看处理后的数据.............................................................................................50 3.2.2 输出处理后的数据.............................................................................................51
Vicon MX测试中应用解

二、本课题的研究现状
国外现状: 动作捕捉技术起源于动画制作,费舍尔于 1915年提出的“Rotoscope”技术被认为是动作捕 捉的先驱。20世纪60年代中期美国麻省理工学院 的罗伯特,开启了以理解三维场景为目标的立体 视觉的大门。20世纪70年代到80年代,英国将该 技术从服务于航海逐渐应用到民用方面。20世纪 90年代,开始运用解剖学原理在人体标贴反光球 来实现光学式动作捕捉。
五、主要参考文献
• [1]刘江,辽原.利用混合动作捕捉方法辅助排球运动技术 标准化的研究[J].北京体育大学学报,2014.5,(30)5:133138. • [2]刘学贞,刘卉,张秀丽,胡宗祥. 红外光点运动测试系统 对射箭技术动作的生物力学研究[J].北京体育大学学 报,2007.5,(30)5:630-647. • [3] 任弘,馨塘,吴晓薇,程静.三维人体扫描技术在身体形 态测量中的应用[J].北京体育大学学 报,2013.1,(36)1:52-54. • [4]刘竞.人体三维姿态重构与动作分析[D].上海交通大学 学报,2014.
• 国内现状: 在我国,关于动作捕捉技术的应用还不是非常 普及,但还是有不少专家、机构和学者们相继开展 了人体动作捕捉方面的研究。但动作捕捉技术应用 解剖学视角打点的研究在国内并不多见,尤其是结 合解剖学知识来研究的相关文献更是少之又少。
三、主要内容和预期目标
• 主要内容: 1.讲解解剖学知识,认识人体运动系统; 2.运用解剖学原理对人体39个点进行标定; 3.通过以往Vicon MX系统装置实验,探究贴点意义; 4.对比多个文献数据,提出关于贴点39个点可能产生的 优缺点; 5.得出结论。 • 预期目标:通过学习解剖学知识,认识人体结构,学 会在人体贴反光标贴39个点,并能快速、准确、高效 完成人体标定,为本研究起到一定的促进作用。
散打鞭腿动作的运动生物力学分析

散打鞭腿动作的运动生物力学分析研究目的:鉴于散打鞭腿技术的重要性,以及在运动生物力学方面研究的缺失。
为了更好地研究散打鞭腿动作的技术特征;打击效果;专项力量耐力特征;关节肌力特征;肌电活动特征;运动学特征;动力学特征;为了更好地推广和发展散打运动以探讨不同水平散打运动员的异同;为散打科学化训练提供训练依据和理论指导。
研究方法:实验对象:根据运动等级分为优秀组和普通组,每组均为13名散打运动员。
实验仪器:VICON动作分析系统、Noraxon无线肌电测试系统、Kistler三维测力台、Noraxon同步信号器、测力靶、BIODEX等速测试系统。
实验方案:整个实验分为VICON、无线肌电、三维测力台、测力靶的同步测试;30秒连击测试;等速测试三部分。
采集数据:打击力度、打击次数、相对峰值力矩、相对平均功率、屈伸肌峰值力矩比、肌电均方根、肌肉贡献度、肌肉共激活、动作时间、关节线速度峰值及时间、关节角速度峰值及时间、膝关节最小角度及时间、膝关节最大角度及时间、关节转动能贡献度、支撑腿扭矩。
研究结果:1.优秀组鞭腿动作的相对打击力度大于普通组,有极其显著性差异。
右鞭腿动作的打击力度大于左鞭腿,低鞭腿有显著性差异。
不同高度鞭腿动作的打击力度排序为低鞭腿>中鞭腿>高鞭腿,优秀组左低鞭与左高鞭、右低鞭与右高鞭有极其显著性差异,左中鞭与左高鞭有显著性差异。
普通组右低鞭与右中鞭有显著性差异,右低鞭与右高鞭有极其显著性差异。
2.30秒连击平均相对打击力度和打击次数优秀组均大于普通组,打击力度有显著性差异。
前10秒、中10秒、后10秒平均相对打击力度和打击次数优秀组均大于普通组,后10秒打击力度有显著性差异。
平均相对打击力度和打击次数排序为前10秒>中10秒>后10秒。
打击次数优秀组前10秒与中10秒有显著性差异,前10秒与后10秒有极其显著性差异。
打击次数普通组前10秒与中10秒、前10秒与后10秒有极其显著性差异。
Vicon动作捕捉系统操作手册

Vicon动作捕捉系统操作手册目录目录 (2)1.1 仪器简介 (3)1.2 仪器主要部件 (4)1.2.1 硬件设施 (4)1.2.2硬件的连接 (6)2.1摄像机设置和采集区域选择 (9)2.2标定 (17)2.2.1定位MX cameras ,使用“Aim MX cameras”选项 (17)2.2.2 标定MX cameras ,使用“Calibrate MX cameras”选项 (19)2.2.3 设定拍摄区域的原点 (23)2.3 数据采集 (25)2.3.1 粘贴标志点及形态学测量 (25)2.3.1.1 两套方案优缺点比较 (26)2.3.1.2 注意事项 (26)2.3.1.3 操作步骤 (26)2.3.2 动作采集 (31)2.3.2.1 建立新的database (31)2.3.2.2 建立静态模型 (34)2.3.2.3 采集实验动作 (41)3.1 数据的处理 (43)3.2 数据的输出 (50)3.2.1 查看处理后的数据 (50)3.2.2 输出处理后的数据 (51)1. 仪器的主要介绍其中包括,仪器的基本信息,主要部件组成,硬件的安装和设置(应包括硬件的连线说明等),仪器的应用等。
如果仪器配有相关的工具附件也在此节进行说明。
1.1 仪器简介英国Oxford Metrics Limited公司是世界上一家非常著名的光学动作捕捉(Motion Capture)系统供应商,它的这项技术在70年代服务于英国海军,从事遥感、测控技术设备的研究与生产。
进入80年代他们将自己在军事领域里的高新技术,逐渐用于民用方面,在医疗、运动、工程、生物等诸多领域生产制造用于动作捕捉的Motion Capture系统。
80年代末,OML又将动作捕捉系统技术应用于影视的动画制作领域。
Vicon是英国OML公司生产的光学动作捕捉motion capture系统。
它是世界上第一个设计用于运动捕捉的光学系统,它以自己非凡的技术性能在motion capture系统硬件制造领域赢得了极高的声誉,并且改写了motion capture系统传统意义上涵盖的内容。
SQUAREENIX安装VICON运动捕捉系统
SQUAREENIX安装VICON运动捕捉系统
佚名
【期刊名称】《程序员:游戏创造》
【年(卷),期】2006(000)002
【摘要】2006午1月11日,VICON宣布为著名的游戏公司SQUAREENIXCo.,Ltd.(史克威尔艾尼克斯)安装一套拥有44部摄像机的VICONMX40运动捕捉系统,这套系统町以进行面部、手部以及全身的运动捕捉。
史克成尔艾尼克斯将利用VICONMX系统为电影片段和游戏即时地记录演员的表演,为他们的下一代游戏制作支持更多的摄像机和更复杂的运动捕捉。
【总页数】1页(P5)
【正文语种】中文
【中图分类】TP319.9
【相关文献】
1.基于VICON运动捕捉系统的动画制作流程 [J], 孙国玉
2.Vicon运动捕捉系统在人行走过程中左右踝关节运动特征的研究 [J], 徐俞弢;王伟杰;徐腾;李家伟;戴逸轩;丁浩
3.Vicon三维运动捕捉系统在人体运动分析中的应用 [J], 罗逸苇
4.Vicon运动捕捉系统在人行走过程中左右踝关节运动特征的研究 [J], 徐俞弢;王伟杰;徐腾;李家伟;戴逸轩;丁浩;
5.Vicon运动捕捉系统对单侧膝关节置换术后双侧膝关节生物力学的评价 [J], 钟
慧敏; 李斌; 陈博; 刘志宏; 郭蕾; 黄萍
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Vicon 动作分析系统
Vicon Motion Analysis System
整理:关鹏、曾祥林、刘国奇
基本原理。
Vicon 是英国OLM公司所生产的光学动能分析系统,它以强大的性能在动作分析硬体领域获得极高的评价,并且改变了动作分析系统传统意义上所涵盖的内容。
Vicon 是一套结合红外线摄影机以及资料处理的动作分析系统。
不同于光点主动发光的设计,Vicon 透过由受试者身上反光球执行反射回来的光线,将摄影机所拍摄的2D 资料转换为3D的图像。
和一般动作分析系统比较起来,Vicon具有更多的摄影机取象,这表示Vicon有更大的取像范围,同时也有着更多的物体能够被捕捉。
应用范围。
Vicon 是一种动能分析及追踪系统,专门用来收集3D 资料并以及时的速度传输到你电脑中,以便你的虚拟人形富有真实的动作或者是受试者之动作能够透过光球完整地建构出来,Vicon的动能追踪被广泛运用到各式各样的领域,从临床分析、医学、重物力学研究、视觉效果以及游戏产品等。
同时Vicon更有在同一采样区域里追踪多个运动物体,并且可以反所有追踪到的细微的动作回传到你的电脑中的功能。
元件规格。
一、Vicon资料处理器
资料处理器的功用便在于控制摄影机,并且将摄影机收集到的资料传
送至电脑中的WORKSTA TION来加以分析。
由外观看来资料处理器
(下图ViconMotion Capture)就像是一部标准的横躺式的个人一般电
脑。
二.M2摄影机
摄影机身光圈系统是Vicon系统硬体的一部分,主要是用来收集由受试者身上反光点传回来的记号。
光圈和摄影机结合可以将光线由受试者身体上的光点所反射来的光及时的收取。
而由光点反射的光线在传回来摄影机时通过一个滤波器,这个滤波器可以确保传回摄影机的光波都是同一种波长。
而滤波器的设定则
是要看投影机敏感度的停整而定。
三.Workstation是安装在电脑中用来控
制资料处理器的软体。
因此安装Workstation 有时会被当作Workstation或者Workstation专
用的电脑。
Workstation 是Vicon 分析软件中的核心部分,主要是用来收集以及处理摄影机接收的初步资料。
从每部摄影机传回来的2D 信号,经过Workstation 的整合之后,便可以重新建立为3D 型的能的档案。
Workstation 也
可说是整个动作捕捉过程中的核心部分。
此
外,为了提供使用者一个控制的界面,
Workstation 还可以编辑以及清除所收集的动
作抓取的资料。
四.Bodybuilder 资料处理软件
Bodybuilder 可说是一种多功能软件,主要便是用来探讨人体的运动。
这项个人化设计的软件可以依照个人要求的不同设计出不同难易度的模组以及得到简繁不一的结果。
软件主要包含Bodybuilder 和reporter 两种不同的界面。
Bodybuilder 是负责资料处理以及各个各个处理模组的设计;reporter 则是负责重复的图片绘制。
Bodybuilder 主要功能包括:处理Workstation 收取的资料、编辑及模拟物体的轨迹、建立人体关节及肢段的模型、建立运动学及动力学参数模组、光球点模组设计、计算角度及动作等等。
本资料处理软件为选择配置。
五Polygon 是一种帮助使用者制作报告及发表的工具软件。
主要是经由视觉报告呈现的方式,来训练实验室人员,使其能够容易且快速制作受试者的分析报告。
事实上Polygon 可以多方面运用在生物力学上,例如运动、动作控制以及后健研究等方面。
Polygon 是由Vicon Workstation 以及vicon bodybuilder 所共同同组成。
透过这两种软件的处理,抓取动作得到的资料便可利用Polygon 软件读取以及分析。
本资料处理软件为选择配置。
标准实验流程如下:
Rb
场地布置
仪器的架设与校正 动作试拍 资料的确认 相关资料的输
出
完成拍摄
实验完成 开始拍摄
摄影机调整的方法
一、捕捉空间的设定
一般而言,小范围的捕捉空间的决定较容易,只要在预期的拍摄范围上摆上反光球,再调整CAMERA的位置即可,不过当考虑到希望有一个较大的拍摄范围,而大小均未知,只希望能够有最大的拍摄空间时,可能会遇到一些困扰,就是无法决定地面反光球的摆设位置,此时可以利用manual中提供的资料来解决,决定理论上可能的最大的拍摄范围,摆上反光球后再利用camera检视修正。
二、camera相关的调整
基本上硬件部分的调整应Calibration之前,也就是若更动摄影机的位置达到不同的拍摄目的,上上述相关的参数都应重新确认,相关调整叙述如下:
焦距
为求拍摄范围达到最大,将焦距调在17.视拍摄需要而定,若需较小的拍摄范围可再往上调,最多至35.
光圈
光圈的调整应视需要而定,首先决定拍摄所使用的maker,并利用同样尺寸的maker在地上排列,检视camera中的maker状况,最远的maker需有3条线。
最近的maker不能变形,通常在无距离的拍摄与使用较小的maker都会将光圈调到最大2.8.
Focal Length Ring :保持在无限远处。
Back Focus Ring:每半年做一次调整,校正完后应确实锁紧。
Camer Rear Panel Swith :一般保持在5.
校正
进行摄影机校正时,检查每台camera,只能看到L-Frame上的四个反光球,如果有其他的反光点便要将其他移除或覆盖或调整确定至少有两台以上的camera可以完整的看到L-frame。
接下来则利用View i Diagnostic Mode调整camera sensttivities,务必使拍摄到的光尽量呈三条线,圆形。
及稳定的形状。
P231
资料输出时主要可以分为以下两个部分,分别为资料的编修与后续运动学计算,主要步骤如下:1,确定分析的资料后,将相关的资料存成c3d档,并在Workstation系统中完成资料的编修。
2,将编修好的动能资料以。
C3d档的形式汇入bodybuiderk中。
最后配合加入动能资料的c3d档与事先转换成。
Mod档,依照上syp0步骤在BodyBouilder中进行运动学的计算,
并求出结果。
注意事项
●进行实地拍摄之前,必须先确定各种资料均做好完整的设定以及场地也必须做好布置。
●如需连接DV拍摄,一定要先将DV连接电脑后,才可打开workstation软件。
●切勿随意调整光圈大小和焦距。
●勿踩踏地上的信号线。
●校正时L-Frame的位置需要固定。
●校正后应清除萤幕上的难点。
●校正后,切勿再次碰触摄影机,如碰触,需要重新校正一次。
●反光线轻薄,小心割破。
、
●实验完毕后,应清理环境。
●如有突发问题,应立即告知管理者。
●当资料收取时会发现有一些点遗失了,这时便可使用copy pattern的功能加以修复,此
方式相当方便,但透过测试发现经过copy pattern修复过的X,Y ,Z 分量皆会出现显著的变化。
因此,若非必要,位于关键点的Maker点应尽量避免使用copy pattern做资料上的补充。
●连结DV时常会因为省电模式的问题导致无法顺利连续DV,因为一旦DV进入省电模
式,便会导致整个系统关机。
因此在使用DV同步拍摄时,注意要避免dv进入省电模式。