单片机与单片机之间的双向通信
单片机多机通信代码
单片机多机通信代码单片机多机通信是指通过单片机实现多个设备之间的数据传输和通信。
在现代的智能家居系统、工业自动化系统以及物联网等领域,单片机多机通信扮演着重要的角色。
为了实现单片机多机通信,需要首先确定通信的方式和协议。
常见的通信方式包括串口通信、SPI通信、I2C通信等。
在选择通信方式时,需要考虑设备之间的距离、通信速率、通信复杂度等因素。
协议方面,可以使用现有的通信协议,如Modbus、CAN、TCP/IP等,也可以根据具体需求自定义通信协议。
在单片机多机通信的实现过程中,首先需要配置单片机的通信接口。
例如,在使用串口通信时,需要设置波特率、数据位数、停止位数等参数。
接下来,需要编写相应的程序代码来实现数据的发送和接收。
发送数据时,可以使用单片机的串口发送函数将数据发送给其他设备;接收数据时,则需要使用单片机的串口接收函数来接收其他设备发送的数据。
在多机通信中,一台设备可以充当主机,负责控制其他设备的工作,也可以充当从机,接收主机发送的指令并执行相应的操作。
主机和从机之间可以通过发送和接收数据来实现通信。
例如,在智能家居系统中,主机可以控制灯光的开关、温度的调节等操作,而从机则负责接收主机发送的指令并执行相应的操作。
在实际应用中,单片机多机通信可以实现设备之间的信息交互和协同工作。
例如,在工业自动化系统中,可以通过多机通信实现各个设备之间的数据共享和协作,提高生产效率和质量。
在物联网中,可以通过多机通信实现各个物联设备之间的联动和互联,实现智能化控制和管理。
单片机多机通信是一种重要的通信方式,可以实现设备之间的数据传输和通信。
通过合理选择通信方式和协议,并编写相应的程序代码,可以实现设备之间的信息交互和协同工作,从而提高系统的功能和性能。
单片机与单片机之间的双向通信
单片机与单片机之间的双向通信在现代电子技术领域,单片机扮演着至关重要的角色。
它们广泛应用于各种智能设备和控制系统中,从家用电器到工业自动化,从汽车电子到医疗设备,几乎无处不在。
而在很多复杂的应用场景中,常常需要多个单片机之间进行通信,以实现协同工作和数据共享。
其中,单片机与单片机之间的双向通信就是一种常见且关键的技术。
那么,什么是单片机之间的双向通信呢?简单来说,就是两个或多个单片机能够相互发送和接收数据。
想象一下,有两个单片机,就像是两个在对话的“小伙伴”,它们可以互相告诉对方自己的状态、采集到的数据或者发出控制指令,从而共同完成一个复杂的任务。
实现单片机之间双向通信的方式有多种,常见的包括串行通信和并行通信。
串行通信就像是单车道的公路,数据一位一位地按顺序传输。
它的优点是只需要少数几根线就能实现通信,节省了硬件资源,常见的串行通信方式有 UART(通用异步收发传输器)、SPI(串行外设接口)和 I2C(集成电路总线)等。
UART 是一种比较简单和常用的串行通信方式。
它不需要时钟信号,通过起始位、数据位、校验位和停止位来组成一帧数据进行传输。
在两个单片机之间使用 UART 通信时,需要分别设置好波特率、数据位长度、校验方式和停止位长度等参数,只有这些参数匹配,才能正确地收发数据。
SPI 则相对复杂一些,它需要四根线:时钟线(SCK)、主机输出从机输入线(MOSI)、主机输入从机输出线(MISO)和片选线(CS)。
SPI 通信速度较快,适合于高速数据传输的场景。
I2C 只需要两根线,即串行数据线(SDA)和串行时钟线(SCL),通过地址来区分不同的从设备,实现多设备通信。
并行通信则像是多车道的公路,可以同时传输多位数据。
它的传输速度快,但需要更多的引脚,硬件成本较高,并且在长距离传输时容易受到干扰。
在实际应用中,选择哪种通信方式取决于具体的需求。
如果对通信速度要求不高,而硬件资源有限,UART 或者I2C 可能是较好的选择;如果需要高速传输大量数据,SPI 或者并行通信可能更合适。
单片机中串行通信的三种类型
单片机中串行通信的三种类型在单片机的世界里,串行通信就像一条小小的高速公路,将各种数据在不同的部件之间传递。
它的基本任务就是让不同的设备能够互相“聊天”,共享信息。
想象一下,如果没有串行通信,单片机和外设之间就像被厚厚的墙隔开了,彼此难以沟通。
因此,了解串行通信的三种主要类型非常重要。
下面,我们就来聊聊这些串行通信的类型吧!1. 异步串行通信1.1 什么是异步串行通信?异步串行通信,顾名思义,就是在数据传输的时候,双方并不需要保持同步。
说白了,就是两头在做各自的事情,偶尔通过约定的信号来“打招呼”。
就像你和朋友在微信上聊天,不需要时时刻刻保持在线,偶尔发个消息就行了。
1.2 异步串行通信的工作原理在这种通信方式中,数据被拆分成一串串的字节,每个字节都会被加上一个起始位和一个停止位。
起始位告诉接收方:“嘿,数据来了!”而停止位则是“这条消息完了!”的信号。
这就像在你发短信时,在开始和结束的时候都留个标记,让对方知道你的信息什么时候开始和结束。
1.3 异步串行通信的应用这种通信方式应用非常广泛,比如我们常用的UART(通用异步收发传输器)就属于这个类别。
UART在我们的生活中几乎无处不在,从电脑的串口到一些简单的传感器都用得上它。
2. 同步串行通信2.1 什么是同步串行通信?同步串行通信和异步串行通信有点像“有组织的队伍”,双方在数据传输的过程中要保持同步。
就是说,你发数据的时候,对方也要准备好接收数据,这就像排队一样,大家都得按顺序来。
2.2 同步串行通信的工作原理在同步通信中,除了数据本身,还需要一个额外的时钟信号来确保数据的准确传输。
可以把时钟信号看作是“指挥棒”,它帮助双方协调一致地进行数据传输。
想象一下在舞台上表演的舞者,大家都得跟着同一个节拍才能跳得整齐划一。
2.3 同步串行通信的应用同步串行通信的速度通常比异步串行通信快,因为它减少了数据传输过程中的额外开销。
常见的同步串行通信协议包括SPI(串行外设接口)和I2C(集成电路间接口)。
单片机的双向通信工作原理

单片机的双向通信工作原理
单片机的双向通信是指单片机与外部设备或其他单片机之间进行双向数据传输的过程。
其工作原理如下:
1. 初始化:首先,单片机需要设置通信口的工作模式和相应的参数。
这可以包括引脚的配置、波特率、数据位数、停止位数等。
2. 发送数据:当单片机需要发送数据时,首先将数据存储在发送缓冲区,然后根据通信口的工作模式,将数据按照一定的格式发送出去。
通常可以通过写入寄存器或者操作特定的寄存器位来触发数据发送。
3. 接收数据:在接收数据时,单片机将数据位从通信线上读取,并将其存储在接收缓冲区。
然后可以从接收缓冲区中读取数据,供单片机进行处理。
和发送数据一样,在某些情况下,需要特定的操作来触发接收过程。
4. 中断机制:为了提高单片机的处理能力和实时性,通常可以使用中断机制来处理双向通信。
通过中断,单片机可以在接收到数据或者完成数据发送等事件发生时,立即对其进行处理,而不需要等待。
总的来说,单片机的双向通信是通过配置通信口参数,将要发送的数据存储在发送缓冲区,然后按照特定的格式发送出去。
同时,在接收时,单片机会从通信口接收数据,并将其存储在
接收缓冲区。
通过中断机制,单片机可以实时地对数据进行处理,提高通信的实时性和可靠性。
双机间的串口双向通信设计

单片机应用课程设计任务书单片机应用课程设计任务书学院名称:计算机与信息工程学院班级名称:学生姓名:学号:题目:双机间的串口双向通信设计指导教师:起止日期:目录一、绪论 (5)1.1设计背景 (5)二、相关知识 (5)2.1 双机通信简介 (5)2.2 单片机A T89C51介绍 (5)2.3串口通信 (6)三、总体设计 (7)3.1 设计要求 (7)四、硬件设计 (8)4.1.整体电路 (8)4.2复位电路 (8)4.3.控制电路 (9)五、软件设计 (9)5.1甲机软件设计 (10)5.2乙机软件设计 (11)六、测试及运行 (13)心得与感受 (15)参考文献 (16)指导教师评语 (17)附录:源程序 (18)一、绪论1.1设计背景随着电子技术的飞速发展,单片机也步如一个新的时代,越来越多的功能各异的单片机为我们的设计提供了许多新的方法与思路。
对于一些场合,比如:复杂的后台运算及通信与高实时性前台控制系统、软件资源消耗大的系统、功能强大的低消耗系统、加密系统等等。
如果合理使用多种不同类型的单片机组合设计,可以得到极高灵活性与性能价格比,因此,多种异型单片机系统设计渐渐成为一种新的思路,单片机技术作为计算机技术的一个重要分支,由于单片机体积小,系统运行可靠, 数据采集方便灵活,成本低廉等优点,在通信中发挥着越来越重要的作用。
但在一些相对复杂的单片机应用系统中,仅仅一个单片机资源是不够的,往往需要两个或多个单片机系统协同工作。
这就对单片机通信提出了更高要求。
单片机之间的通信可以分为两大类:并行通信和串行通信。
串行通信传输线少,长距离传输时成本低,且可以利用数据采集方便灵活,成本低廉等优点,在通信中发挥着越来越重要的作用。
所以本系统采用串行通信来实现单片机之间可靠的,有效的数据交换。
二、相关知识2.1 双机通信简介两台机器的通信方式可分为单工通信、半双工通信、双工通信,他们的通信原理及通信方式为:1.单工通信:是指消息只能单方向传输的工作方式。
单片机与单片机通信原理

单片机与单片机通信原理
单片机与单片机之间的通信原理是通过串行通信或并行通信进行的。
串行通信是指将数据按位顺序传输,而并行通信则是同时传输多个位。
在串行通信中,需要使用UART(通用异步收发器)进行通信。
UART将数据转换为适合传输的格式,并通过一个线路将数据发送到接收方。
在发送数据时,发送方将数据发送到UART
的发送缓冲区中,UART会按照设定的速率将数据按位发送。
接收方的UART会接收到发送方发送的数据,将其保存在接
收缓冲区中,然后应用程序可以从接收缓冲区中读取数据。
在并行通信中,通常使用I2C(双线串行总线)或SPI(串行
外围接口)进行通信。
I2C通信使用两根线路:数据线(SDA)和时钟线(SCL)。
发送方通过SDA线将数据发送给接收方,同时使用SCL线提供时钟信号。
接收方通过SCL线接收时钟
信号,并从SDA线上读取数据。
SPI通信需要至少四根线路:时钟线(SCK)、主设备输出(MOSI)、主设备输入(MISO)和片选线(SS)。
在SPI
通信中,主设备通过时钟线提供时钟信号,通过MOSI线发送数据给从设备,并通过MISO线接收从设备传输的数据。
片选线用于选择将要进行通信的从设备。
无论是串行通信还是并行通信,单片机之间的通信都需要事先约定好通信协议和参数设置,以确保数据的准确传输。
通信协
议可以包括数据格式、波特率等。
同时,通信的双方也需要进行数据的校验和错误处理,以防止数据传输中的错误或丢失。
甲乙两机串口通信双向控制系统软件设计与系统仿真课案
case 0: transfer('D');
led1=1; led2=1;
break;
case 1: transfer('A');
led1=0; led2=1;
break;
case 2: transfer('B');
led1=1; led2=0;
break;
case 3: transfer('C');
1.
题目设计要求:
甲乙两机串口双向通信设计
要求:利用51单片机,RS232芯片,LED灯,数码管进行双机通信设计。甲机可按键控制乙机的LED显示;乙机可按键控制甲机的数码管显示。完成以下设计环节:
1)使用Altium Desinger开发工具,设计电路原理图。
2)使用Uvision2开发平台,采用C语言或汇编语言设计软件程序。
TMOD=0x20;//定时器T1工作在方式2
PCON=0x00;
TH1=(256-253)/32;
TL1=(256-253)%32;
RI=0;
TI=0;
TR1=1;
IE=0x90;//串行口中断打开
while(1)
{
if(key==0)
{
while(key==0);
num=(num+1)%4;
}
switch(num)
图2.1总体框图
双机通信系统通过甲乙单片机的串行口来实现数据的收发。
甲单片机通过开关电路来启动发送程序,甲机当开关按下时向乙机发送一个数据,乙机上蜂咛器发出声音提示有数据发送过来,乙机通过接收中断来接收和开关判断是否接收甲机发送过来的数据,并通过编写好的数据代码在8个发光二极管上显示主机发送过来的数据。
单片机双机通信实验报告
单片机双机通信实验报告
实验目的:
1. 了解单片机之间的串口通信原理;
2. 掌握单片机之间的双机通信方法;
3. 实现单片机之间的数据互相传输。
实验器材:
1. 单片机开发板(两块);
2. USB转串口模块(两个);
3. 杜邦线若干;
4. 电脑。
实验步骤:
首先,将单片机开发板和USB转串口模块进行连接,具体的连接方法如下:
1. 将USB转串口模块的TXD引脚连接到单片机开发板的RXD引脚上;
2. 将USB转串口模块的RXD引脚连接到单片机开发板的TXD引脚上;
3. 将USB转串口模块的GND引脚连接到单片机开发板的GND引脚上;
4. 将USB转串口模块的VCC引脚连接到单片机开发板的VCC引脚上。
接下来的步骤如下:
1. 打开两台电脑上的串口调试助手软件,并分别将波特率设置为相同的数值(例如9600);
2. 在一台电脑上,发送数据给另一台电脑。
具体的操作是在串口调试助手软件上输入要发送的数据,然后点击发送按钮;
3. 在另一台电脑上,接收来自第一台电脑发送的数据。
具体的操作是在串口调试助手软件上点击接收按钮,然后可以看到接收到的数据。
实验结果:
通过实验可以看到,单片机之间成功地实现了数据的双向传输。
一台单片机发送的数据可以被另一台单片机接收到。
实验总结:
本实验通过串口通信的方式实现了单片机之间的双机通信。
通过这种方式,可以方便地实现单片机之间的数据互相传输,可以用于各种应用场景,如传感器与控制器之间的数据传输等。
同时要注意,串口通信的波特率要设置一致,否则数据将无法正确接收。
单片机的双机串口通信原理

单片机的双机串口通信原理单片机的双机串口通信原理是通过串口连接两个单片机,使它们能够进行数据的传输和通信。
串口是一种常见的通信方式,它使用两条信号线进行数据的传输:一条是串行数据线(TXD),用于发送数据;另一条是串行接收线(RXD),用于接收数据。
通过串口通信,两个单片机可以进行双向的数据传输,实现信息的互相交流和共享。
在双机串口通信中,一台单片机充当主机(Master),另一台单片机充当从机(Slave)。
主机负责发起通信请求并发送数据,从机负责接收并响应主机发送的数据。
通信过程中,主机和从机需要遵守相同的协议和通信规则,以确保数据的正确和可靠传输。
双机串口通信的主要步骤如下:1. 端口初始化:在双机串口通信开始之前,两台单片机的串口端口需要初始化。
主机和从机需要设置相同的波特率(Baud Rate),数据位数(Data Bits)、停止位数(Stop Bits)和校验方式(Parity Bit),确保两台单片机之间的通信能够正常进行。
2. 数据发送:主机将要发送的数据写入到串口发送寄存器中,然后通过串口发送线路将数据位一位一位地发送给从机。
主机发送完所有数据位后,等待从机的响应。
3. 数据接收:从机通过串口接收线路接收主机发送的数据位,然后将接收到的数据位存放在串口接收寄存器中,等待从机的处理。
4. 数据处理:从机接收到主机发送的数据后,根据通信协议和通信规则进行数据处理。
从机可能需要对数据进行校验、解析和执行相应的操作,然后将处理结果写入到串口发送寄存器中,以供主机进行相应的处理。
5. 响应发送:从机将处理结果写入到串口发送寄存器中,然后通过串口发送线路将数据位一位一位地发送给主机。
从机发送完所有数据位后,等待主机的进一步操作。
6. 数据接收:主机通过串口接收线路接收从机发送的数据位,然后将接收到的数据位存放在串口接收寄存器中,等待主机的处理。
7. 数据处理:主机接收到从机发送的数据后,根据通信协议和通信规则进行数据处理。
PC机与单片机多机双向通信的设计应用

制命 令 , 控制现场设备 。 而 在 工 业 现 场 经 常 要 实 现 多 点 分 布式 数 据采集或控制 , 因此 , 必 须 实 现 上 位 机 和 多 个 单 片机 之 间 的 双 向 通 信 。上 位 机 和 单 片 机 之 间 的 双 向通 信 涉 及 到 硬 件 和软 件 两 方
信。 第 6步 中 , 如 果 主机 收到 的数 据 错 误 , 则结束通信。 在 通 信 开 始以后 , 从 机 每 一 次 通 信 都 会 加 上 超 时处 理 , 避 免 通 信 错 误 导 致
通信的死锁。 2 P C 机 端软 件 通 信 接 口设 计 P C 机 端 程 序 主 要 处 理 来 自单 片 机 的 数 据 , 并 以 合 适 的 方 式 展示给用户 , 因此 用 户 体 验 非 常 重 要 。 为 了保 证 用 户 接 1 3 的响 应
n e s s o f s o f t war e .
K e y wo r d s : P C, MCU。 t wo - wa y c o mmu n i c a t i o n , a r c h i t e c t u r e
由 于 单 片 机 的处 理 能力 较 弱 ,适 合 通 过 各 类 传 感 器 采 集 数 据 或 向设 备 发送 控 制命 令 等 , 不适合做数据处理 , 因此 实 践 中通 常 由 单 片 机 与 上 位 机( 一般采用 P C机) 联合构成 完整的系统 , 单
面 的工 作 。 硬 件 方 面 主要 关 注 采 用 何 种 通 信 接 口。 常 用 的 接 口有 串行 口 、 F C接 口、 S P I 接 口及 以太 网接 口等 。实 践 中 , 根据 环 境 、 传输距离 、 实 现 成本 等 因 素选 择 接 口。 软 件 方 面 主 要 关 注 如 何 设 计 双 方 的高 层 通 信 协 议 以正 确 及 时 地 完 成 数 据 交换 。 硬 件 方 面 一 旦 确 定 了接 口类 型 , 则 相 应 的 电路 也 就 确 定 了 。 软件 可 通 过 合 理 的架 构 设 计 , 以 适 应 不 同 的接 口 , 为 系 统 提 供 更 多 的灵 活 性 。 1 通 信 协 议 设 计
51单片机双机通信原理(一)
51单片机双机通信原理(一)51单片机双机通信简介•什么是51单片机双机通信•双机通信的作用和应用场景基本原理•单片机串口通信原理–串口通讯协议–数据帧的构成•串口通信的硬件连接–引脚连接方式–串口信号格式设置单向通信实现•主从模式–主机发送数据–从机接收数据•编程实现–主机端程序设计–从机端程序设计双向通信实现•主从模式–主机发送数据–从机接收数据–主机接收数据–从机发送数据•编程实现–主机端程序设计–从机端程序设计通信协议的设计•自定义通信协议–协议的格式–数据的解析与封装高级功能扩展•多机通信实现•数据加密与解密•异常处理与误码纠错总结•51单片机双机通信的基本原理和实现方式•可能遇到的问题及解决方案•双机通信的进一步应用展望简介51单片机双机通信是指使用51系列单片机实现两台或多台单片机之间的数据传输和通信。
双机通信可以实现在多个单片机之间传递数据、完成控制指令的下发、数据的采集和处理等功能。
在各种电子设备和嵌入式系统中,双机通信被广泛应用,可以实现设备之间的互联和协同工作,提高系统的灵活性和智能化水平。
基本原理单片机串口通信原理串口通信是一种将数据通过串行线路进行传输的通信方式。
在51单片机的串口通信中,常用的是UART(通用异步收发传输器)通信协议。
UART通信采用的是异步传输方式,数据按照固定的数据帧格式进行传输。
串口通信的硬件连接在51单片机的串口通信中,需要将主机和从机的UART引脚连接起来。
常用的连接方式是通过一对直线的串行数据线(TXD和RXD)连接主从机,其中TXD是发送数据的引脚,RXD是接收数据的引脚。
为了确保数据的正确传输,还需要进行串口信号格式的设置,包括波特率、数据位数、停止位数和校验位等。
单向通信实现主从模式在单向通信中,主机负责发送数据,从机负责接收数据。
主机通过串口发送数据帧,从机通过串口接收数据帧,并进行相应的处理。
编程实现在主机端程序设计中,需要配置串口通信的参数,并使用串口发送数据的相关函数来发送数据。
单片机双向并口通信技术

乱 刚乱
()电路原理 图 a
() 4 b 7 Hc7 4的真值表
图2 7 H 7 4 C 4的 电路原 理图与真值 表
触 发器 的 Q 端 作 为 单 片 机 写 数 据 之 前
的检测信 号 ; 作 为另一 个单 片机读数 据 的 检 测 信 号 , 接 到 单 片 机 的 外 部 中 断 0 利 用 , 外 部 中 断 0 的边 沿 触 发 方 式 接 收 数 据 , 保 证 了通 信 的 实 时 性 和可 靠 性 ;CL 作 为 接 收 端 R 的 控 制 信 号 , CL 作 为 发 送 端 的 控 制 信 号 。 K 利 用 7 HC 4的双 D 触 发 器 ,2个 单 片机 分 别 4 7 有 一 套 收 发 控 制 信 号 , 控 制 2个 单 片 机 通 过
Q
L H L H
L L
x
t t
X H( t l H N t I Noe ( o e 1
H H
L
x
X0
Q0
1设 计原 理
设 计 原 理 图 如 图 1 。
C P10 P1 1 4 P 2 P 3 P 4 n , P 16 . Pl 7 RX D N T0 NTl V DD 39 P 3 00 8 37 P0 2 . 36 P0 3 … 35 P0 5 3 4 P 3 O6 3 P 7 3 0. 2 #EA 3l ALE 3 0 PS EN 2 9 P 7 2 2. 8 P 2 26 7 P 5 2 2. 6 P 2 24 5 P 2 23 4
c?。 0 7P
l C3
P 3 22 . 2
P . 2 21 2
吉
VCC 4 1
V S S
单片机课程设计-- 单片机之间的双向通信演示

课程设计任务书课程单片机课程设计题目单片机之间的双向通信演示专业姓名学号一、任务以AT89C51单片机为控制核心,利用串行通信技术实现两个单片机之间的数据传输。
二、设计要求[1] 单片机甲机向单片机乙机发送控制命令符,甲机同时接收乙机发送的数字,并显示在数码管上[2] 基本电路包括:单片机最小系统,串口通信电路,LED显示电路等。
[3] 提交设计报告、电路图及程序源码。
三、参考资料[1] 万光毅.单片机实验与实践教程[M]. 北京:北京航空航天大学出版社.2005.1.[2] 张毅刚.单片机原理及应用[M]. 北京:高等教育出版社.2003:160-190.[3] 张小波, 徐航.基于MCS—51单片机的串行通信技术.[M].北京:北京航空航天大学出版社.2006[4] 胡汉才.单片机原理与其接口技术(第二版)[M].北京:清华大学出版社,2004.[5] 何文才,杜鹏.基于VB.NET的PC机和MCS-51单片机之间的串行通信 [J]. 北京电子科技学院学报. 2006.4期[6] 李秀忠.基于单片机的LED显示屏控制电路设计.[J].现代电子技术. 2010 .15期完成期限2012.6.29 至2012.7.8指导教师专业负责人2012年6月29 日目录第1章绪论 (1)1.1 单片机AT89C51概述......................... 错误!未定义书签。
1.2 LED显示屏控制技术状况 (2)1.3 MAX232概述 (2)1.4 本设计任务 (3)第2 章总体方案论证与设计......................... 错误!未定义书签。
2.1 LED驱动模块................................ 错误!未定义书签。
2.2 总体硬件组成框图........................... 错误!未定义书签。
第3章系统硬件设计.. (4)3.1 单片机最小系统硬件设计 (4)3.2 串行通信电路 (5)3.3 LED显示电路 (6)第4章系统的软件设计 (7)4.1 甲单片机程序设计 (7)4.2 乙单片机程序设计 (8)第5章系统调试与测试结果分析 (8)5.1 使用的仪器仪表 (9)5.2 系统调试 (9)5.3 测试结果 (9)结论 (9)参考文献 (11)附录1 程序 (12)附录2 仿真效果图 (17)第1章绪论随着科学技术的发展,单片机在各个领域的应用越来越广泛,计算机领域,航天领域,电子技术领域等,都离不开单片机的使用。
单片机各种通信方式的特点和主要应用场合
单片机各种通信方式的特点和主要应用场合串口用的比较多:RS232,用于与标准的RS232设备通讯网卡,用于互联网或采用网卡端口的设备通讯I2C,用于单片机自己外设或多个单片机之间通讯CAN,工业标准,汽车中常用并口:并口就是直接将数据输入或输出,多少位数据就要用多少根线,此外还要加上控制线2根以上。
例如8位的数据通讯,至少用10根线。
由于单片机的引脚数目有限,这种方法很不实用。
并行口现在计算机都几乎不用了。
如果感兴趣,你就找以前的计算技术方面的书上还有介绍。
并口线路复杂,可靠性低,速度低,除了早期的打印机还用,也几乎没有这样的外设了。
大家好,通过前一期的学习,我们已经对ICD2 仿真烧写器和增强型PIC 实验板的使用方法及学习方式有所了解与熟悉,学会了如何用单片机来控制发光管、继电器、蜂鸣器、按键、数码管等资源,体会到了学习板的易用性与易学性,看了前几期实例,大部分都是基于单片机端口操作原理呢?大家是否觉得这样一个单片机系统似乎缺少点什么呢?不错,本期我们将介绍单片机与电脑通讯,使单片机与PC 机能够联机工作。
单片机除了需要控制外围器件完成特定的功能外,在很多应用中还要完成单片机和单片机之间、单片机和外围器件之间,以及单片机和微机之间的数据交换和指令的传输,这就是单片机的通信。
单片机的通信方式可以分为并行通信和串行通信。
并行方式传送一个字节的数据至少需要8 条数据线。
一般来讲单片机与打印机等外围设备连接时,除8条数据线外,还要状态、应答等控制线,当传送距离过远时电线要求过多,成本会增加很多。
单片机的串行通信方法较为多样,传统的串行通信方式是通过单片机自带的串行口进行RS232 方式的通信。
串行通信是以一位数据线传送数据的位信号,即使加上几条通信联络控制线,也比并行通信用的线少。
因此,串行通信适合远距离数据传送,如大型主机与其远程终端之间,处于两地的计算机之间,采用串行通信就非常经济。
串行通信又分为异步传送和同步传送两种基本方式。
单片机的通信方式
单片机的通信方式单片机通信是指单片机之间的数据传输方式,用于各种嵌入式应用。
通信方式有很多,常用的有串行通信方式和并行通信方式。
1. 串行通信串行通信方式是指在同一时刻只有一个数据位在传输的通信方式。
串行通信可以分为同步串行通信和异步串行通信。
异步串行通信通常用于短距离通信和低速通信,因为异步通信需要使用更多的数据位来描述数据,需要更长的时间来传输。
同步串行通信通常用于高速通信和长距离传输。
同步通信使用一个时钟信号来同步传输的数据,这样数据传输速度比异步通信快。
并行通信方式是指在同一时刻多个数据位同时传输的通信方式。
并行通信速度比串行通信速度快,但需要使用更多的线路。
并行通信通常用于高速通信和高速数据传输,如网络、计算机等系统。
3. I2C通信I2C通信是一种具有双向数据传输和同步时序的串行通信方式,常用于连接多个外设到单片机。
I2C通信采用两根线路和多个地址和设备来实现通信。
SPI通信是一种快速、高效、双向的串行通信方式。
SPI通信采用四根线路来实现通信,这些线路包括:时钟线、数据线、主从选择线和片选信号线。
SPI通信通常用于高速数据传输和控制数据的传输。
CAN通信是一种适用于工业控制和汽车控制等领域的串行通信协议。
CAN通信用于处理较大量的数据,通信速度较快,主要支持多个节点之间的独立通信。
CAN通信采用特定的通信协议来处理信息,保证通信正常。
CAN通信通常包括两个节点,即发送者和接收者。
总之,单片机通信是嵌入式系统中非常重要的功能,有多种不同的通信方式和协议,可以根据不同的应用场合和需求进行选择。
51单片机的2个串口分别通信的方法
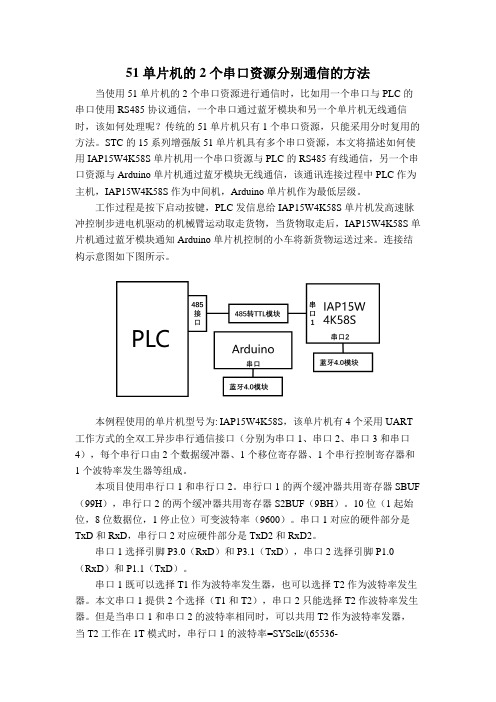
51单片机的2个串口资源分别通信的方法当使用51单片机的2个串口资源进行通信时,比如用一个串口与PLC的串口使用RS485协议通信,一个串口通过蓝牙模块和另一个单片机无线通信时,该如何处理呢?传统的51单片机只有1个串口资源,只能采用分时复用的方法。
STC的15系列增强版51单片机具有多个串口资源,本文将描述如何使用IAP15W4K58S单片机用一个串口资源与PLC的RS485有线通信,另一个串口资源与Arduino单片机通过蓝牙模块无线通信,该通讯连接过程中PLC作为主机,IAP15W4K58S作为中间机,Arduino单片机作为最低层级。
工作过程是按下启动按键,PLC发信息给IAP15W4K58S单片机发高速脉冲控制步进电机驱动的机械臂运动取走货物,当货物取走后,IAP15W4K58S单片机通过蓝牙模块通知Arduino单片机控制的小车将新货物运送过来。
连接结构示意图如下图所示。
本例程使用的单片机型号为:IAP15W4K58S,该单片机有4个采用UART 工作方式的全双工异步串行通信接口(分别为串口1、串口2、串口3和串口4),每个串行口由2个数据缓冲器、1个移位寄存器、1个串行控制寄存器和1个波特率发生器等组成。
本项目使用串行口1和串行口2。
串行口1的两个缓冲器共用寄存器SBUF (99H),串行口2的两个缓冲器共用寄存器S2BUF(9BH)。
10位(1起始位,8位数据位,1停止位)可变波特率(9600)。
串口1对应的硬件部分是TxD和RxD,串行口2对应硬件部分是TxD2和RxD2。
串口1选择引脚P3.0(RxD)和P3.1(TxD),串口2选择引脚P1.0(RxD)和P1.1(TxD)。
串口1既可以选择T1作为波特率发生器,也可以选择T2作为波特率发生器。
本文串口1提供2个选择(T1和T2),串口2只能选择T2作波特率发生器。
但是当串口1和串口2的波特率相同时,可以共用T2作为波特率发器,当T2工作在1T模式时,串行口1的波特率=SYSclk/(65536-[RL_TH2,RL_TL2])/4,SYSclk表示系统时钟频率,[RL_TH2,RL_TL2]表示T2H,T2L的定时初值设置值。
单片机多机通信的原理
单片机多机通信的原理单片机多机通信是指通过一组单片机进行信息传输和交换的过程。
单片机多机通信可以实现不同单片机之间的数据传输、控制和协调工作。
在多机通信中,每个单片机都有独立的功能和任务,并通过通信方式进行协作完成工作。
1.通信协议:通信协议是单片机多机通信的重要基础。
在多机通信中,需要定义一套协议,规定数据帧的格式,数据的传输方式和操作的流程。
常见的通信协议有SPI、I2C、UART等。
选择合适的通信协议可以根据传输距离、传输速度、设备复杂度等需求来进行选择。
2.总线结构:多机通信中常使用总线结构,将多个单片机连接在同一总线上。
总线结构包括三种类型:并行总线、串行总线和混合总线。
并行总线是指在总线的每条线上同时传输一个单元(八位),速度较快;串行总线是指数据逐位的传输,速度较慢但可以实现长距离传输;混合总线则结合了并行总线和串行总线的优点。
根据具体应用需求,选择合适的总线结构。
3.通信方式:在多机通信中,可以采用半双工通信或者全双工通信方式。
半双工通信是指通信双方交替发送和接收数据,在同一时刻只能进行发送或接收操作;全双工通信是指通信双方可以同时进行发送和接收操作。
根据通信需求和硬件条件,选择合适的通信方式。
4.帧同步:在多机通信中,数据的传输需要进行帧同步,即接收端需要识别出每个数据帧的起始和结束位置。
帧同步可以通过在传输数据中插入特定的起始标识符和结束标识符来实现。
当接收到起始标识符后,接收端开始接收数据帧,直到接收到结束标识符,表示数据帧传输完成。
5.编码和解码:多机通信中,发送数据的单片机需要将数据进行编码,接收数据的单片机需要对接收到的数据进行解码。
编码和解码方式有很多种,如二进制编码、格雷码编码等。
编码和解码的目的是确保数据的可靠传输和正确接收。
6.冲突检测和处理:在多机通信中,由于多个单片机共享同一总线,可能会出现冲突和竞争的情况。
为了避免冲突,需要设计冲突检测和处理机制。
常见的机制有仲裁器、优先级检测和时间片轮转等。
单片机中常见的接口类型及其功能介绍
单片机中常见的接口类型及其功能介绍单片机(microcontroller)是一种集成了中央处理器、内存和各种外围接口的微型计算机系统。
它通常用于嵌入式系统中,用于控制和监控各种设备。
接口是单片机与外部设备之间进行数据和信号传输的通道。
本文就单片机中常见的接口类型及其功能进行介绍。
一、串行接口1. 串行通信口(USART):USART是单片机与外部设备之间进行串行数据通信的接口。
它可以实现异步或同步传输,常用于与计算机、模块、传感器等设备进行数据交换。
2. SPI(串行外围接口):SPI接口是一种全双工、同步的串行数据接口,通常用于连接单片机与存储器、传感器以及其他外围设备。
SPI接口具有较高的传输速度和灵活性,可以实现多主多从的数据通信。
3. I2C(Inter-Integrated Circuit):I2C接口是一种面向外部设备的串行通信总线,用于连接不同的芯片或模块。
I2C接口通过两条双向线路进行数据传输,可以实现多主多从的通信方式,并且占用的引脚较少。
二、并行接口1. GPIO(通用输入/输出):GPIO接口是单片机中最常见的接口之一,用于连接与单片机进行输入输出的外围设备。
通过设置相应的寄存器和引脚状态,可以实现单片机对外部设备进行控制和监测。
2. ADC(模数转换器):ADC接口用于将模拟信号转换为数字信号,常用于单片机中对模拟信号的采集和处理。
通过ADC接口,单片机可以将外部传感器等模拟信号转化为数字信号,便于处理和分析。
3. DAC(数模转换器):DAC接口用于将数字信号转换为模拟信号。
通过DAC接口,单片机可以控制外部设备的模拟量输出,如音频输出、电压控制等。
三、特殊接口1. PWM(脉冲宽度调制):PWM接口用于产生特定占空比的脉冲信号。
通过调节脉冲的宽度和周期,可以控制外部设备的电平、亮度、速度等。
PWM接口常用于控制电机、LED灯、舵机等设备。
2. I2S(串行音频接口):I2S接口用于在单片机和音频设备之间进行数字音频数据传输。
单片机原理及应用(C语言版)(周国运)习题答案
单⽚机原理及应⽤(C语⾔版)(周国运)习题答案单⽚机原理及应⽤(C语⾔版)思考题与习题答案第1章单⽚机概述1.什么是单⽚机?答:将中央处理器(Central Processing Unit,CPU)、随机存储器、只读存储器、中断系统、定时器/计数器以及I/O接⼝电路等微型计算机的主要部件集成在⼀块芯⽚上,使其具有计算机的基本功能,就叫做单⽚微型计算机(Single Chip Micro Computer,SCMC),简称单⽚机。
由于单⽚机的指令功能是按照⼯业控制的要求设计,所以单⽚机⼜称为微控制器(Micro Controller Unit,MCU)。
2.单⽚机有哪些特点?答: (1)单⽚机的存储器ROM和RAM是严格区分的。
ROM称为程序存储器,只存放程序、固定常数及数据表格。
RAM则为数据存储器,⽤作⼯作区及存放⽤户数据。
(2)采⽤⾯向控制的指令系统。
(3)单⽚机的I/O引脚通常是多功能的。
(4)单⽚机的外部扩展能⼒强。
(5)单⽚机体积⼩,成本低,运⽤灵活,易于产品化。
(6)⾯向控制,能有针对性地解决从简单到复杂的各类控制任务,因⽽能获得最佳的性能价格⽐。
(7)抗⼲扰能⼒强,适⽤温度范围宽。
(8)可以⽅便地实现多机和分布式控制,使整个控制系统的效率和可靠性⼤为提⾼。
3.单⽚机的应⽤有哪些?答: (1)⼯业控制。
单⽚机可以构成各种⼯业控制系统、数据采集系统等。
如数控机床、⾃动⽣产线控制、电机控制、测控系统等。
(2)仪器仪表。
如智能仪表、医疗器械、数字⽰波器等。
(3)计算机外部设备与智能接⼝。
如图形终端机、传真机、复印机、打印机、绘图仪、磁盘/磁带机、智能终端机等。
(4)商⽤产品。
如⾃动售货机、电⼦收款机、电⼦秤等。
(5)家⽤电器。
如微波炉、电视机、空调、洗⾐机、录像机、⾳响设备等。
(6)消费类电⼦产品。
(7)通讯设备和⽹络设备。
(8)⼉童智能玩具。
(9)汽车、建筑机械、飞机等⼤型机械设备。
(10)智能楼宇设备。
基于RS485协议实现单片机与单片机之间的通讯

基于RS-485协议实现单片机与单片机之间的通讯摘要:介绍以RS-485为通讯方式的两个单片机之间的通讯,同时给出单片机与单片机之间的通讯程序设计。
关键词:RS-485通讯单片机串行通讯0 引言随着工业化的发展,人们对现场仪表的要求越来越高,为了满足控制室对现场的实时监控,确保现场数据的实时获取,需要用一种方式将现场情况实时反映给控制室,我们研究了一种方便简单功、能优越的通讯方式:用RS-485实现现场单片机和控制室单片机的实时通讯。
通过操作控制室单片机就能实现对现场单片机的操作,节省了大量的时间以及相应的人力。
1、RS-485通讯协议RS-485采用平衡传输方式,连接时需要在传输线上接终接电阻。
RS-485可以采用二线与四线方式,二线制可实现真正的多点双向通信,采用四线连接时,即只能有一个主(Master)设备,其余为从设备,无论是四线还是二线连接方式总线上最多可接32个设备。
RS-485最大传输距离约为1219米,最大传输速率为10Mb/s。
平衡双绞线的长度与传输速率成反比,在100kb/s速率以下,才可能使用规定最长的电缆长度。
只有在很短的距离下才能获得最高速率传输。
一般100米长双绞线最大传输速率仅为1Mb/s。
RS-485需要2个终接电阻,其阻值要求等于传输电缆的特性阻抗,终接电阻接在传输总线的两端。
在短距离传输时可不需终接电阻,即一般在300米以下不需终接电阻。
本设计中采用的485通讯元件是75LBC184,该器件带有内置高能量瞬变噪声保护装置,可提供可靠的低成本的直连(不带绝缘变压器)数据线接口,不需要任何外部元件。
2、单片机与单片机的通讯系统本设计中单片机选用C8051F020,该单片机有100个功能引脚,其中有64个通用I/O端口。
C8051F020内有2个增强型串行口:UARTO和UART1,这两个串行口都可以工作在全双工异步方式或半双工同步方式,并且支持多处理器通信。
75LBC184与单片机连接时只需将R和D端分别与单片机的RXD 和TXD 相连即可。