UVW平台及其视觉对准系统研究
uvw定位原理
uvw定位原理定位原理:uvw定位原理1. 什么是uvw定位原理?uvw定位原理是一种基于三个轴的坐标系统的定位原理。
它使用了三个轴,即U轴、V轴和W轴,来确定一个物体在空间中的位置。
这种定位原理常用于计算机图形学、三维建模以及定位技术等领域。
2. U轴、V轴和W轴的作用•U轴:U轴指向X正方向,用于表示物体在X轴上的位置。
•V轴:V轴指向Y正方向,用于表示物体在Y轴上的位置。
•W轴:W轴指向Z正方向,用于表示物体在Z轴上的位置。
3. U、V、W坐标的计算方法•U轴的计算方法:U = X + Y•V轴的计算方法:V = Y - X•W轴的计算方法:W = Z4. 示例假设一个物体A的坐标为(2, 3, 4),那么可以通过uvw定位原理计算出物体A在U、V、W轴上的位置。
•U轴的计算:U = 2 + 3 = 5•V轴的计算:V = 3 - 2 = 1•W轴的计算:W = 4因此,物体A在uvw定位原理下的坐标为(5, 1, 4)。
5. 优势与应用uvw定位原理具有以下优势:•简单直观:通过使用三个轴,直观地表示了物体在三维空间中的位置。
•精确性:uvw定位原理可以提供较高的定位精度,适用于需要高精度定位的应用领域。
•扩展性:可以通过增加轴数,进一步提升定位精度。
uvw定位原理在以下领域中得到了广泛的应用:•计算机图形学:在三维建模、物体渲染等方面使用uvw定位原理,以确定物体在二维或三维空间中的位置。
•定位技术:通过使用uvw定位原理,可以实现对目标物体的精确定位,广泛应用于室内定位、导航系统等领域。
6. 总结uvw定位原理是一种基于三个轴的坐标系统的定位原理,通过使用U、V、W轴,可以确定物体在三维空间中的位置。
它具有简单直观、精确性和扩展性等优势,并在计算机图形学和定位技术等领域得到了广泛应用。
通过学习和理解uvw定位原理,可以更好地应用于相关领域的实际问题中。
7. 实例解析为了更好地理解uvw定位原理,我们来看一个实例:假设有一个室内定位系统,使用uvw定位原理来确定目标物体在三维空间中的位置。
UVW平台标定方法、设备、纠偏方法、装置及对位系统[发明专利]
![UVW平台标定方法、设备、纠偏方法、装置及对位系统[发明专利]](https://img.taocdn.com/s3/m/58d247c0f80f76c66137ee06eff9aef8941e486a.png)
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 202010762261.2(22)申请日 2020.07.31(71)申请人 广东利元亨智能装备股份有限公司地址 516057 广东省惠州市惠城区马安镇惠州大道旁东江职校路2号(厂房)(72)发明人 陈腾飞 燕峰伟 丁媛 周俊杰 杜义贤 (74)专利代理机构 北京国昊天诚知识产权代理有限公司 11315代理人 王华强(51)Int.Cl.G06T 7/73(2017.01)G06T 7/80(2017.01)(54)发明名称UVW平台标定方法、设备、纠偏方法、装置及对位系统(57)摘要本发明揭示一种UVW平台标定方法、设备、纠偏方法、装置及对位系统。
标定方法包括:获得相机在XY方向的像素当量及相机坐标系xyθ与世界坐标系XYθ的夹角ε;获取相机坐标系xyθ中世界坐标系原点与相机坐标系原点沿X、Y方向距离Δx及Δy;根据夹角ε、Δx及Δy获得相机坐标系xyθ与世界坐标系系XYθ的映射关系。
采用平移标定以及旋转标定获得相机坐标系与世界坐标系的映射关系,而后对工件进行纠偏时,始终以世界坐标系XYθ作为运算基础,快速输出任意世界坐标系XYθ姿态下的UVW轴对应的运动量。
权利要求书2页 说明书9页 附图2页CN 111862221 A 2020.10.30C N 111862221A1.一种UVW平台标定方法,其特征在于,包括:步骤1、控制UVW平台按照预设平移距离,分别沿X、Y方向运动m次(m≥2),每完成一次平移后控制UVW平台停止,则控制相机获取一次图像;步骤2、根据平移获取的所有图像,获得相机在XY方向的像素当量及相机坐标系xyθ与世界坐标系XYθ的夹角ε;步骤3、控制UVW平台按照预设角度依次旋转n次(n≥2),每完成一次旋转后控制UVW平台停止,则控制相机采集一次图像;步骤4、根据旋转获取的所有图像及相机在XY方向的像素当量,获取相机坐标系xyθ中世界坐标系原点与相机坐标系原点沿X、Y方向距离Δx及Δy;步骤5、根据夹角ε、Δx及Δy获得相机坐标系xyθ与世界坐标系系XYθ的映射关系。
多AUV协同作业中的互定位方法研究的开题报告

多AUV协同作业中的互定位方法研究的开题报告一、选题背景及研究意义无人潜水器(Autonomous Underwater Vehicle, AUV)的应用范围越来越广泛,如海洋科学研究、海洋资源勘察、海洋环境监测、海底管线维护等领域。
在某些任务中,单个AUV无法完成,需多台AUV进行协同作业。
多AUV协同作业对AUV的互定位精度要求较高,因此互定位方法的研究变得极为重要。
随着计算机科学、通信技术、控制技术等的发展,AUV的技术不断得到改进和提高,但在实际应用中,AUV协同作业仍存在很多问题,其中之一便是如何保证AUV的互定位精度。
互定位的目的是确定多台AUV 的位置和姿态,以便它们能够协同工作,避免碰撞和相互干扰。
因此,研究多AUV协同作业中的互定位方法具有重要的理论意义和实际应用价值。
二、研究内容及技术路线本文主要研究多AUV协同作业中的互定位方法,包括传统方法和基于无线传感器网络(Wireless Sensor Network, WSN)的方法。
具体的研究内容包括:1. 分析多AUV协同作业的互定位方法,包括基于声纳的单点定位方法、差分GPS测量方法以及基于视觉的方法等。
2. 基于WSN的多AUV互定位方法研究,构建AUV与WSN的网络拓扑结构并进行节点定位。
3. 通过仿真实验进行互定位方法的比较和分析,比较不同互定位方法的优缺点,选择最佳方法进行应用。
技术路线:1. 总结国内外多AUV互定位方法的研究现状和发展趋势。
2. 通过文献综述和实地调研,分析和比较不同互定位方法的原理和实现步骤。
3. 构建基于WSN的多AUV互定位系统,并进行测试和数据分析。
4. 通过仿真实验,比较不同互定位方法的优缺点,选择最佳方法进行应用。
5. 针对所选择的互定位方法,设计并实现多AUV协同作业。
三、预期研究成果及分析通过本文的研究,在多AUV协同作业中提出了基于WSN的互定位方法,并实现了该方法在实际应用中的效果。
基于自主作业的AUV视觉系统
文章编号 2 2 2基于自主作业的ΑΥς视觉系统Ξ胡震中国船舶科学研究中心江苏无锡摘要 自主作业能力是智能水下机器人 ∏ ∏ ∂ ∂ 的发展方向 本文介绍了用于 ∂作业的一个视觉系统 描述了系统的硬件结构和软件体系 论述了水下图像处理方法 详细描述了用于目标识别的神经网络的结构!建模及神经网络识别方法 给出了神经网络特征向量和识别结果关键词 ∂ 智能水下机器人 视觉 神经网络中图分类号 ×° 文献标识码ΑΥςΟΠΤΙΧΑΛςΙΣΙΟΝΣΨΣΤΕΜΒΑΣΕΔΟΝΑΥΤΟΝΟΜΟΥΣΤΑΣΚΧηιναΣηιπΣχιεντιφιχΡεσεαρχηΧεντερ ΩυξιΑβστραχτ × √ √ ∂ ∏ ∏ ∂ √ √ ∏ ∏ × ∂ √ ∏ ∏ √ × ∏ ∏ × ∏ ∂ √ × ∏ ∏ × √ ∏Κεψωορδσ ∂ ∏ ∏ ∂ √ ∏1引言 Ιντροδυχτιον智能水下机器人 ∏ ∏ ∂ ∂ 着重研究水下浮游式智能机器人技术 构成以自主完成侦察!伪装与欺骗!自动绘制雷区图!援潜救生!探测和取样等较为复杂的水下作业为背景 具有学习功能 能在海洋环境下进行演示并有人工干预能力的水下机器人试验平台 在自主性和适应性两个方面都有突破智能水下机器人光视觉系统着重研究光成像最优设计的计算机仿真和机器人运动对视觉信息所产生的影响及其补偿技术 研究水下物体的三维建模!识别!定位和跟踪的精确描述的有效算法 充分利用人工智能和神经网络的知识工程 进行水下世界的描述!表达!学习和判断 以实现水下自主探测和识别目标!自主援潜救生 模拟卸螺栓 作业和自主绘制雷区图2视觉系统硬件体系 ΤηεσοφτωαρεσψστεμοφΑΥςϖισιον光视觉系统的硬件结构如图 所示 其中包括水面和水下两部分 由一根四芯光纤连接水面和水下两部分2 1水面部分水面由光视觉计算机和水面光端机组成 光视觉计算机完成视觉建模和高层视觉信息处理和理解 实现光视觉计算机与其他水面计算机的网络通讯 建立光视觉计算机与水下控制器的串行通信 实时监控系统每个节拍的运行状态与处理参数 光视觉计算机带 图像采集卡和录像机 该系统具有实时卷积和各种统计功能 用于水下摄像机图像采集和图像数据处理第 卷第 期 年 月机器人ΡΟΒΟΤ∂√Ξ基金项目 本项目为国防科工委九五重点预研课题 收稿日期图 ∂光视觉系统的硬件结构ƒ × ∏ ∏ ∂ √2 2水下部分水下部分由水下光端机!视频切换与灯控装置及水下摄像机和水下灯组成 机器人平台上配备两台摄像机 其中前向摄像机用于目标引导过程 当机器人运行到目标上方时 切换到后向摄像机工作 精确引导机械手进行相应的作业 对应每台摄像机 分别装有左!右两个水下灯 根据自然光照和水下图像灰度 视频切换与灯控装置自动控制水下灯的光强 并根据相应的指令 切换前向和后向摄像机的视频信号 视频信号由光端机上传至光视觉计算机 切换信号和灯控指令利用光视觉计算机串口由光端机下传至控制装置的单片机 并进行相应的执行动作 水下灯电压从 ∗ ∂分十级连续可调3机器人光视觉软件体系 ΤηεσοφτωαρεσψστεμοφΑΥςϖισιον∂光视觉系统软件体系如图 所示 共分为四个模块低层))水下环境的目标自适应检测 该模块检测图像中是否有目标出现 其中包括水下照明控制 图像采集与预处理等中层))基于知识的目标有效特征提取和预测 该模块进行图像处理 提取目标特征 并根据目标模型进行学习 形成知识库 得到单幅图像的初步理解结果和评价高层))多幅图像的信息融合与理解 该模块对多幅图像信息进行匹配和融合 形成可靠的!稳定的视觉理解结果视觉系统控制模块 视觉系统中的每个层次均可通过控制策略调整 ∂的自身状态 形成主动视觉理论中的/眼动0效果该软件体系既体现了 的三层次计算理论 又采用了主动视觉的控制策略 每个层次的处理结果都可控制整个系统的状态参数进行调整和优化 从而提高了结果的可靠性 改善了对噪声的鲁棒性及解的稳定性等系统低层具有自适应性 目标检测模块中水下环境!图像采集!目标检测与照明控制构成一个闭环控制 根据系统中所采集的图像灰度自动调整水下光源的参数 直至采集到灰度适中的图像 经过滤波!二值化等预处理后 检测图像中是否出现目标 并控制 ∂调整姿态参数获取远距离的全局目标机器人 年 月信息系统中层具有自学习能力和预测能力 视觉系统根据目标特征和模型信息 学习目标的各个部分构件 形成知识库 并通过远距离的全局信息和部分特征对目标识别进行预测 提高了视觉系统的智能水平 若没有发现有效特征 则控制 ∂继续寻找图 ∂视觉系统的软件体系ƒ × ∂ √系统高层具有在未知环境下的作业能力 在未知目标环境中 视觉获得的信息通常具有不确定性!多义性和不完善性 多义性和误差的来源包括 摄像机透视投影的多义性 量化误差!噪声干扰!校准不准确等带来的误差 克服这个困难的途径之一是模仿人的视觉过程 把多次观察的图像信息进行融合 提高环境感知的可靠性和准确性 系统高层是视觉系统的精确理解 通过多幅图像的匹配和信息融合对目标进行识别和定位 控制机械手进行相应的作业 若机械手作业一次不成功 系统则继续提供有关数据4 图象处理 Ιμαγεπροχεσσινγ4 1 图像预处理水下图像的质量受环境的影响非常大 图像预处理也就十分的重要 在我们的系统中 图像预处理主要采取了消除水粒子散射的低通滤波技术和增强图像对比度的小波变换技术 经过 ∂在海上的试验表明我们所采用的图像预处理方法是有效的 由于篇幅的关系 在这里不作详细介绍 4 2 图像分割二值化是利用图像中要提取的目标物与其背景灰度特性上的差异 设置一个灰度阈值 凡是灰度值低于阈值的象素都变成某一个灰度值 而灰度值高于这个阈值的象素都变成另一个灰度值 从而将物体与其背景以明显不同的灰度级别区别开来 选择阈值的方法有多种 如°2 试探法 直方图峰值法和双阈值法等 我们系统采用使目标和背景分割误差最小的最佳阈值法 4 3 特征提取我们在图像中提取得特征有中心方位!孔数!凹凸性!圆形度!角点数!紧密度!平滑度!主轴角度!长短径之比等九个 它们组成神经网络的一个输入向量 作为目标识别的依据5 神经网络与目标识别 ΑΝΝανδοβϕεχτρεχογνιζε模式识别理论中传统的识别方法有 模板匹配法!统计特征法!句法结构分析及模糊识别等 这些方法能描述简单模式的性质 具有一定的抗干扰性 但规范化的特征矢量严重限制了识别系统的灵活性 使得系统对可获取的信息利用率低 智能化模式识别旨在增强系统的自适应能力!学习能力以及自联想能力 神经网络理论为此提供了有效的途径 人第 卷第 期胡 震 基于自主作业的 ∂视觉系统工神经网络的许多特点 在模式识别和计算机视觉中有独到的应用之处 利用人工神经网络对目标的有效特征进行学习 并结合规则推断目标的有效特征 可以提高视觉系统的学习和预测等智能水平5 1 神经网络结构神经网络结构见图 其结构与其它神经网络结构 如ΒΠ网 类似输入变量和输出变量组成一个向量 输出变量已知的向量称为模型向量 输出变量未知的向量称为预报向量 如输入变量Π μ μ μΜ 输出变量Θ μΜ μΜ ΜΛ 则一个模型向量和预报向量为μϖ Π Θμ μ μΜ μΜμΛ图 神经网络结构图ƒ图 中π为预报向量 μ为模型向量 ι为输入变量神经元 ο为输出变量神经元 Ν表示模型向量的个数 Μ输入变量的个数 Κ输出变量的个数 图中只有一个 πχ为罚系数图 中Α层为输入层 Β层!Χ层为隐含层 Β层神经元个数是模型向量个数与输入变量的个数的乘积 Μ≅Ν Χ层神经元个数是模型向量个数的 倍 ≅Μ Δ层为输出层Α层神经元输入 ΞΑιπιΑ层神经元输出 ΨΑι φ ΞΑι ΞΑιΒ层神经元输入 ΞΒιϕΕΜκΨΑκμιιϕ ΔκϕΒ层神经元输出 ΨΒιϕ φ ΞΒιϕ ΞΒιϕΧ层δ类神经元输入 ΞΧιΕΜϕΨΒιϕΧ层δ类神经元输出 ΨΧιφ ΞΧιπχ εΞχιΧ层μο类神经元输入 Ξ{Χι μοιΧ层μο类神经元输出 ΨϖΧι φ Ξ{Χι Ξ{ΧιμοιΔ层神经元输入 ΞΔΕΝιΨΧιΞ{ΔΕΝιΨΧιΨϖΧιΔ层神经元输出 πο ΨΔφ ΞΔΞ{ΔΞΔΞ{Δ神经网络的建模过程就是神经网络的学习过程 即确定神经网络的输入变量!输出变量!罚系数°识别 预测 过程则利用这些参数送入神经网络中对未知样本进行预报机 器 人 年 月5 2神经网络建模神经网络的建模过程就是学习过程 建模过程有以下步骤5 2 1建立模型向量数据集本文所采用的模型向量共有 个变量 个输入变量 个输出变量 输入变量即为目标的特征值 分别为中心方位!孔数!凹凸性!圆形度!角点数!紧密度!平滑度!主轴角度!长短径之比 输出变量为目标类型 分别为锚雷!沉底雷!鱼雷!假目标和/可能是0五种目标类型5 2 2正规化常规法该方法首先扫描所有模型向量的每个变量 找出最大值和最小值 然后将每个变量规范在≈ 范围内静态法扫描所有模型向量的每个变量 计算每个变量的均值和标准偏差 并求出一规范因子 使得那些标准偏差与均值相差 的变量变为 或 如果模型数据已经规范在某个范围内 则使用常规法进行正规化 否则使用静态法进行 无论使用哪种正规方法 都不会影响结果 而只影响罚系数 本文根据目标特征值的特点 选用静态法进行正规化5 2 3罚系数罚系数的选择依据以下几个原则模型向量越多 罚系数越小 变量越多 罚系数越大 数据噪声越大 罚系数越大用不同罚系数试验 描绘罚系数和均方误差的曲线 求出最优罚系数过小的罚系数会导致学习过度罚系数有两种类型 静态和动态 如果模型向量在超维空间 2 均匀分布 应采用静态类型 反之 则采用动态罚系数 即有许多模型向量在预报向量周围时 罚系数将减小 当较少的模型向量在预报向量周围时 罚系数将加大 本文根据试验结果和模型向量的分布 选用动态罚系数 最优值为当最优罚系数确定后 神经网络模型也随之确定了 供模式识别或预报模块进行调用表1视觉识别所用的部分模型向量 Ταβλε1Οβϕεχτ σδαταβασε第 卷第 期胡震 基于自主作业的 ∂视觉系统5 3神经网络模式识别神经网络能进行动态的学习和识别 即新的变量和向量可随时加入网络 而老的变量和向量可从网络中删除 并且无需脱机学习即可得到新的结果 这一点是神经网络在工程领域应用的关键 在神经网络识别中 已经得到的模型向量不可能完全覆盖实际问题的数据集 有些向量甚至是错误的 如果模型向量本身是错误的 则有可能导致识别结果错误 此时可以进行在线学习 更新知识库 从而保证识别的正确率 表 是本文进行模式识别时的部分模型向量 其中 ∗ 列是输入特征变量 ∗ 列分别对应 种不同的目标类型 锚雷 沉底雷 鱼雷 不是雷的假目标及/可能是雷0的目标6目标定位与作业引导 ΟριεντατιονχαλχυλατινγανδτασκΛεαδινγ水下目标的定位采用了序列图像融合技术!目标姿态估计技术及单副图像定位技术 在另两篇文章中已有详细论述≈ 这里不再讨论作业引导是作业型 ∂系统所必须的 当光视觉发现并识别了作业目标后 对目标进行三维空间的定位 即根据 ∂所在的大地坐标 确定目标的大地坐标 由控制系统控制 ∂接近作业目标 但由于作业精度一般要求很高 系统精度是达不到作业要求的 这就要求光视觉引导 ∂逐步接近作业对象 在实际应用中 我们在发现作业对象以后就锁定目标 融合 ∂运动参数和光视觉处理结果 跟踪并预测目标方位 对目标进行精确定位 计算机械手与作业目标之间的相对位置 确定作业时机 发作业命令 如果一次作业失败 便进行重新引导 通过 ∂系统的海试表明 该套视觉系统可以正确识别作业对象 引导 ∂接近作业目标 使机械手成功实施作业 在 ≅ ≅ 的工作区内 作业的误差小于参考文献 Ρεφερενχεσ胡震 袁小海 陈荣盛 刘培林 用于目标检测和精确定位的水下机器人视觉系统 中国造船 41袁小海 陈荣盛 胡震 刘培林 基于序列图像融合的视觉理解技术 ° ≤ ≤⁄ ≤ ≤ ∏ ∂ ° 2 ∞ ≤作者简介胡震 2 模式识别与智能控制专业硕士 研究领域 水下机器人视觉和智能控制上接第 页地接系统信号地 在以后的调试中 输出信号的稳定性有了很大提高 满足系统要求4 3氧浓度等输出信号不稳定原设计中氧浓度分析仪等的输出信号质量较差 直流信号上叠加有干扰毛刺信号 由于计算机采样频率较高 所以计算机采样后输出显示值跳动较大 为了清除随机的瞬间干扰信号 采用 点数字平滑滤波 且 点间采样间隔延长为 如此处理后 显示数字值跳动明显减小 跳动量在允许范围内5结论 Χονχλυσιον计算机控制系统是潜水钟的一个重要系统 它担负着钟的操纵!通讯!检测和显示任务 其性能的优劣以及可靠性的高低直接影响作业的成功率 我们在进行计算机控制系统的设计时 兼顾了/可靠性0和/先进性0 将/自动控制0和/手动控制0相结合 发挥各自的优势 从陆上联调!模拟试验考核结果来看 各项性能指标均达到了要求 数次八小时连续考核无故障 说明了系统设计还是很成功的作者简介张良 2 工程师 研究领域 水下潜器 水下机器人控制系统陈建平高级工程师 研究领域 水下潜器 水下机器人总体技术及控制系统机器人 年 月。
基于机器视觉的UVW定位系统
基于机器视觉的UVW定位系统
张从鹏;刘重阳
【期刊名称】《机床与液压》
【年(卷),期】2018(046)014
【摘要】面向工业装备对高性能运动平台的需求,开发一套基于机器视觉的UVW 定位系统.提出一种基于机器学习的视觉系统标定方法,利用平台运动学分析得到的平台坐标与图像坐标的方程,建立UVW平台的逆运动学图像求解关系,用于求解目标坐标的控制量.完成了定位系统的机器学习视觉标定和双目视觉定位控制实验,结果表明:设计的UVW平台视觉标定方法简单高效,运动平台具有较高的对位精度,可以满足工业应用需求.
【总页数】4页(P108-110,127)
【作者】张从鹏;刘重阳
【作者单位】北方工业大学机电工程学院,北京100144;北方工业大学机电工程学院,北京100144
【正文语种】中文
【中图分类】TP29
【相关文献】
1.基于机器视觉的工业机器人定位系统研究与应用 [J], 廖仕军
2.基于机器视觉的漆包线组装识别与电阻点焊定位系统 [J], 刘明;黄增好;曹彪;曾家铨;田然
3.一种基于机器视觉的室内无人机定位系统设计 [J], 伍颖昌;李星莹;李登云;周鑫;吴昊栋
4.一种基于机器视觉的室内无人机定位系统设计 [J], 伍颖昌;李星莹;李登云;周鑫;吴昊栋
5.基于LabView的机器视觉定位系统在汽车板簧生产中的应用 [J], 王恺;张磊因版权原因,仅展示原文概要,查看原文内容请购买。
UVW自动对位平台即视觉对位平台
产品详情
“UVW自动对位平台视觉对位平台机器视觉台 GMT同款 XYY-150/XYY-200”参数说明
产品特性:
1. 侧面锁紧方式特殊设计,增强台面的锁紧稳定性
2. 铝合金材质精密加工,黑色阳极氧化表面处理
3.采用进口交叉滚柱导轨,精度高,承载较大,寿命长
4. 基座跟台面的精度,保证了平台的直线度,偏摆,平行度
5. 调整平移台采用测微头驱动
6. 微分头在平移台中心放置,操作方便;若放在侧向的话,结构更加紧凑
7. 采用弹簧复位,清除轴向间隙
8. 台面和底座分布标准孔距的安装孔,方便安装和组合
9. 可与其它系列位移台组合成多维的组合平台
产品图片:。
uvw视觉旋转标定方法
uvw视觉旋转标定方法Visual rotation calibration is a crucial technique in computer vision and imaging systems. It is used to establish the relationship between the intrinsic parameters of a camera, such as focal length and principal point, and the extrinsic parameters, which involve the camera's orientation and position in space.视觉旋转标定是计算机视觉和成像系统中的一项关键技术。
它用于建立摄像头的内参数(如焦距和主点)与外参数(涉及摄像头在空间中的方向和位置)之间的关系。
One common method for visual rotation calibration is through the use of a calibration pattern, such as a checkerboard or grid. By capturing images of the pattern from different viewpoints, the system can extract key features and calculate the camera parameters.一种常见的视觉旋转标定方法是通过使用一个标定图案,如棋盘格或网格。
通过从不同角度捕获图案的图像,系统可以提取关键特征并计算摄像头参数。
The accuracy of the calibration process is essential for tasks like 3D reconstruction, object tracking, and augmented reality. Improper calibration can lead to errors in depth estimation, object localization, and image distortion.校准过程的准确性对于3D重建,物体跟踪和增强现实等任务至关重要。
基于双目视觉的UVW定位平台关键技术研究

基于双目视觉的UVW定位平台关键技术研究随着科技的快速发展,双目视觉技术在机器人领域中得到了广泛应用。
基于双目视觉的UVW定位平台是一种能够实现高精度定位的平台,具有广阔的应用前景。
本文将重点研究该平台的关键技术。
首先,双目视觉系统的构建是实现UVW定位平台的基础。
该系统由两个摄像头组成,这两个摄像头安装在不同的位置,并能够同时获取目标物体的图像信息。
通过摄像头之间的基线距离和焦距等参数,可以计算出目标物体在三维空间中的位置信息。
其次,双目视觉的图像处理是实现UVW定位平台的关键技术之一。
在获取到目标物体的图像信息后,需要对图像进行处理,提取出目标物体的特征点。
通过特征点的匹配和跟踪,可以得到目标物体在图像中的位置信息。
另外,双目视觉的立体匹配算法也是UVW定位平台中的关键技术之一。
立体匹配算法可以通过对左右两个图像的像素进行对比,得到目标物体在图像中的深度信息。
通过深度信息的计算,可以得到目标物体在三维空间中的坐标信息。
此外,为了提高UVW定位平台的精度,还需要考虑系统误差的校正。
由于摄像头的安装误差、镜头畸变等因素,可能会导致定位结果的偏差。
因此,需要进行系统误差的校正,以提高定位的准确性。
最后,需要进行系统的集成与优化。
在实际应用中,UVW 定位平台需要与其他系统进行集成,以实现更加复杂的任务。
为了提高系统的性能,还需要进行系统的优化,以提高定位的速度和精度。
综上所述,基于双目视觉的UVW定位平台是一种能够实现高精度定位的平台,其关键技术包括双目视觉系统的构建、图像处理、立体匹配算法、系统误差校正以及系统的集成与优化。
通过对这些关键技术的研究,可以进一步提高UVW定位平台的性能,拓展其应用领域。
正运动技术丨UVW对位平台控制算法在视觉引导上的应用
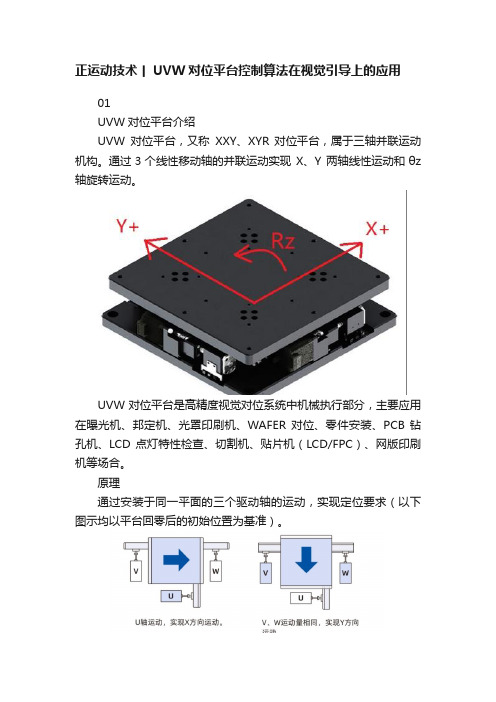
正运动技术丨UVW对位平台控制算法在视觉引导上的应用01UVW对位平台介绍UVW对位平台,又称XXY、XYR 对位平台,属于三轴并联运动机构。
通过3个线性移动轴的并联运动实现X、Y 两轴线性运动和θz 轴旋转运动。
UVW对位平台是高精度视觉对位系统中机械执行部分,主要应用在曝光机、邦定机、光罩印刷机、WAFER 对位、零件安装、PCB 钻孔机、LCD 点灯特性检查、切割机、贴片机(LCD/FPC)、网版印刷机等场合。
原理通过安装于同一平面的三个驱动轴的运动,实现定位要求(以下图示均以平台回零后的初始位置为基准)。
02正运动技术UVW对位平台算法介绍正运动技术的UVW平台运动控制算法采用机械手FRAME33模型,可以实现单轴直线运动、两轴线性插补、两轴圆弧插补、空间圆弧等复杂运动。
电机方向及角度范围:虚拟的XY满足右手法则,角度正向与虚拟XY满足右手法则,实际电机轴方向无要求,根据实际情况填写结构参数即可。
1)轴顺序实际机械手关节轴定义简写U轴Axis_uV轴Axis_vW轴Axis_w直角坐标系虚拟轴定义简写平移轴X Viraxis_x平移轴Y Viraxis_y旋转轴RZ Viraxis_rz逆解时,将UVW关节轴映射到X,Y,θz 轴的算法。
••BASE(Axis_u,Axis_v,Axis_w)CONNFRAME(33,tablenum, Viraxi s_x, Viraxis_y,Viraxis_rz)2)结构参数设置建立机械手连接时,需要将机械结构参数依次填写到table数组中,参数说明如下。
TABLE(Tablenum,lu, lv,lw, angleonecircle, diru, dirv, dirw) Tablenum 存储转换参数的TABLE位置。
lu U轴的距离参数,填写正值,零点到U轴的垂直距离。
lv V轴的距离参数,填写正值,零点到V轴的垂直距离。
lw W轴的距离参数,填写正值,零点到W轴的垂直距离。
UVW平台运动控制算法以及matlab仿真
UVW平台运动控制算法以及matlab仿真UVW平台运动控制算法以及matlab仿真最近公司同事因为对某视觉对位平台的运动控制算法有疑问,所以来请教我。
由于我也是第⼀次接触到UVW⾃动对位平台(也可以叫XXY⾃动对位平台),于是找了⼀些资料学习⼀下,⼤概了解了运动模式后,使⽤matlab模拟了此平台,并验证了UVW平台资料提供的运动控制算法的正确性。
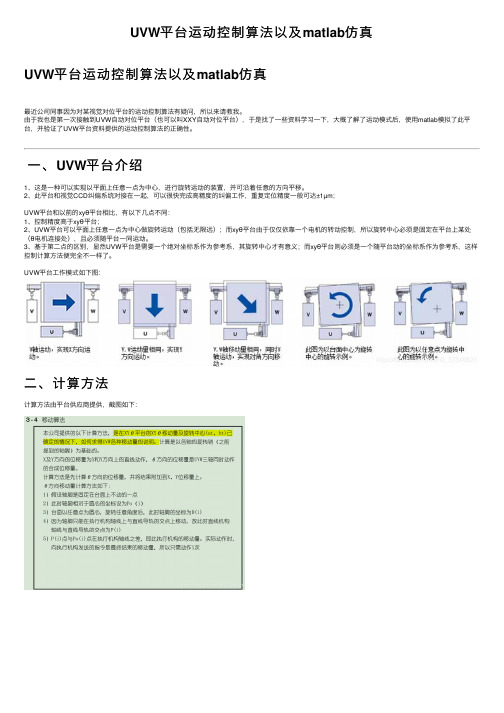
⼀、UVW平台介绍1、这是⼀种可以实现以平⾯上任意⼀点为中⼼,进⾏旋转运动的装置,并可沿着任意的⽅向平移。
2、此平台和视觉CCD纠偏系统对接在⼀起,可以很快完成⾼精度的纠偏⼯作,重复定位精度⼀般可达±1µm;UVW平台和以前的xyθ平台相⽐,有以下⼏点不同:1、控制精度⾼于xyθ平台;2、UVW平台可以平⾯上任意⼀点为中⼼做旋转运动(包括⽆限远);⽽xyθ平台由于仅仅依靠⼀个电机的转动控制,所以旋转中⼼必须是固定在平台上某处(θ电机连接处),且必须随平台⼀同运动。
3、基于第⼆点的区别,显然UVW平台是需要⼀个绝对坐标系作为参考系,其旋转中⼼才有意义;⽽xyθ平台则必须是⼀个随平台动的坐标系作为参考系,这样控制计算⽅法便完全不⼀样了。
UVW平台⼯作模式如下图:⼆、计算⽅法计算⽅法由平台供应商提供,截图如下:仔细研究⼀下上述的公式,很容易发现,这只是简单的⼏何运算以及对⼆维坐标的求解问题。
简单说明⼀下视觉对位和运动控制思路:1、通过UVW平台供应商提供的说明书,找到机械参数,得到UVW三个轴的初始坐标(基于UVW平台原点坐标系);2、通过视觉标定⽅法,确定相机坐标系到UVW平台坐标系的转换矩阵;确定标志物模板基于UVW平台原点坐标系的坐标值(x_m, y_m);3、通过相机得到标志物模板位置和待纠偏标志物之间的x、y、θ偏移量(基于UVW平台原点坐标系);4、按照上图公式,输⼊三个轴初始坐标,设置旋转中⼼为(0,0),输⼊θ偏移量,可得到UVW三轴新的坐标值,以及待纠偏物体的新的坐标,以及三个电机对应的给进量A1、A2、A3;5、输⼊上⼀步求得的UVW三轴新的坐标值,另外通过上⼀步求得的待纠偏物体的新的坐标,计算得此时待纠偏物体到模板点位置的x2、y2偏移量;输⼊x2、y2偏移量,则可以得到三个电机对应的给进量B1、B2、B3;6、将5和6步获取的三个电机的给进量对应相加,分别得到对应电机给进量C1、C2、C3,并⽤此给进量驱动对应电机即可。
20190808视觉自动对位系统应用1-PPT课件
名称
型号
数量
备注
1
IPC
--
1
控制方式需与外部通讯
2
CCTV镜头
C5028-M
2
可调焦、调光圈
3
CCD相机
STC-E43A
2
静态隔行扫描相机
4
CCD相机电缆线
12W02
2
12针相机延长线(带电源)
5
CCD视频延长线
BNC同轴线
2
6
光源
TZ-D24-X-24V
2
7
光源控制器
DY-DC24V-CH2
1
8
STC-E43A/42A
二.视觉自动对位系统选型
特别注意:如果使用Sentech公司的STC-E43A或STC-E42A则需要另外配电缆线,电缆线的相关参数如下所示 :
红色虚线为需要另外增加
二.视觉自动对位系统选型
对位用USB相机 :
视觉对位系统可根据客户的应用选型不同接口的相机,分辨率可以支持200万像素甚至更大分辨率相机.
Sentech公司 STC-TB33USB/STC-TB83USB/STC-TB200USB
选型要点: 根据客户机台结构,可选择USB数据接口
200万像素CCD帧率为15fps(高速), 7.5fps(中速),3.5fps(低速),需根据客户要求选型
二.视觉自动对位系统选型
(2) 视觉对位系统图像采集卡选型I
祥凌科技的优势: 产品线丰富,致力于Total Solution
PC-Based视觉对位系统的特点分析
谢谢!
模板
3.2 玻璃贴合机
- 流 程 - 1.将玻璃面板Ⅱ上的标志移动到相机视野内 2.检出并登录目标位置 3.将玻璃面板Ⅰ移动至平台 4.检出玻璃面板Ⅰ上的标志并进行定位 5.粘合玻璃面板ⅠⅡ 6.排出玻璃面板
机器视觉对位中的高精度UVW平台应用方法研究
陈腾飞(广东利元亨智能装备股份有限公司,广东 惠州 516057)摘 要:UVW平台具有刚性强、响应快、定位精度高等优点,广泛应用于机器视觉对位。
设计一套机器视觉对位系统,根据UVW平台的运动学特性,建立运动量与目标坐标的转换方法。
文章提出了UVW平台标定方法并展示其完整的实施过程,完成视觉纠偏实验,结果表明提出的标定方法简单高效,设计的对位系统纠偏精度高,具有较高的工业实用价值。
关键词:机器视觉;UVW平台;对位系统中图分类号:TP391.41 文献标志码:A文章编号:2096-3092(2020)06-0047-03机器视觉对位中的高精度UVW 平台应用方法研究Abstract: UVW platform has the advantages of strong rigidity, fast response and high positioning accuracy, which has widely used in machine vision counterpoint. A set of machine vision counterpoint system is designed. According to the kinematic characteristics of UVW platform, the transformation method between the amount of motion and the target coordinates is established. In this paper, the calibration method of UVW platform is proposed and its complete implementation process is demonstrated. The visual deviation correction experiment is completed. The result shows that the proposed calibration method is simple and efficient. The alignment system is designed with high accuracy of deviation correction, which has high industrial practical value.Key words: machine vision, UVW platform, alignment system(Guangdong Liyuanheng Intelligent Equipment Co., Ltd., Huizhou, Guangdong 516057)Chen TengfeiResearch on the Application Method of High Precision UVW Platform in Machine VisionAlignment当前,机器视觉技术在工业自动化领域得到广泛而深入的应用,随着制造和测量精度要求的不断提高,机器视觉对位平台的重要性愈发凸显[1]。
UVW对位平台运动轨迹规划及实验
机床与液压MACHINE TOOL&HYDRAULICSApr.2019 Vol.47No.82019年4月第47卷第8期DOI:10.3969/j.issn.1001-3881.2019.08.032本文引用格式:程建,邹大鹏,杨志军,等.UVW对位平台运动轨迹规划及实验[J].机床与液压,2019,47(8):146-150.CHENG Jian,ZOU Dapeng,YANG Zhijun,et al.Trajectory Planning and Experiment of UVW Alignment PlatformMechanism[J].Machine Tool&Hydraulics,2019,47(8):146-150.UVW对位平台运动轨迹规划及实验程建,邹大鹏,杨志军,李伟林,张安邦(广东工业大学广东省计算机集成制造重点实验室,广东广州510006)摘要:为提高触摸屏机械对位平台的贴合精度和效率,对直线电机UVW共平面机械对位平台进行机构运动学分析。
运用几何法求解机构位置反解,为平台定位提供理论计算依据;通过MATLAB软件求解机构位置正解,以此为理论依据,仿真求得平台工作空间大小;研究最短轨迹和最小时间轨迹规划算法,并通过实验验证了平台极限轨迹和工作空间与仿真结果一致。
以视觉检测平台对不同轨迹规划的速度和时间进行实验验证,证明了该轨迹规划对于提高触摸屏机械对位平台贴合性能的合理性和可行性。
关键词:贴合机;UVW平台;轨迹规划;工作空间中图分类号:TN873+.93Trajectory Planning and Experiment of UVW Alignment Platform MechanismCHENG Jian,ZOU Dapeng,YANG Zhijun,LI Weilin,ZHANG Anbang(Guangdong Provincial Key Lab of Computer Integrated Manufacturing,Guangdong University ofTechnology,Guangzhou Guangdong510006,China)Abstract:To improve accuracy and efficiency of current touch screen mechanical alignment platform,the kinematic analysis for the linear motor UVW coplanar mechanical alignment platform was carried out.The geometric method was used to solve the inverse kinematics of the mechanism,which provided a theoretical basis for the platform positioning.Through MATLAB software,the positive position of the mechanism was solve.On this basis,the workspace size of the platform was simulated,and the shortest path and minimum time trajectory planning algorithms were studied.The results show that the limit trajectory and workspace of the platform are consistent with the simulation results.The speed and time of different trajectory planning methods were tested and verified by visual inspection platform.It is proved that the trajectory planning is reasonable and feasible to improve the bonding performance of touch screen mechanical contraposition platform.Keywords:Laminating machine;UVW platform;Trajectory planning;Workspace0前言传统的对位平台多采用串联或需要电机单独进行驱动才可旋转的机械对位平台,存在对位误差累积和平台机构过大等缺点⑴。
UVW工作平台及其在精密对位系统中的应用的开题报告

UVW工作平台及其在精密对位系统中的应用的开题报告
一、选题背景
在工业生产中,对于精密加工和测量等操作,需要精确对位的实现。
为了达到高精度
的对位效果,需要使用精密的对位系统。
UVW工作平台就是一种常见的精密对位系统。
UVW工作平台是由数控机床上常用的电动旋转平台和测头组成的一种XYZ方向运动平台,具有较高的平移和旋转精度。
在各类精密零件的加工过程中,使用UVW工作平台能够有效提高工作效率,降低损耗。
二、研究目的及意义
本文旨在探究UVW工作平台的结构、原理和应用,特别是在精密对位系统中的应用。
通过对UVW工作平台的研究,实现对其在高精度对位系统中的应用,从而提高工程师对UVW工作平台的应用水平,为现代工业生产提供更好的技术支持。
三、研究内容及方法
本研究将探讨UVW工作平台的结构和基本原理,并将结合精密对位系统的实际操作和应用情况,分析UVW工作平台在精密对位系统中的应用,并提出相关的改进意见。
具体方法包括文献调研和实验观察分析等方法。
四、预期成果
本研究预期达到的成果主要包括以下方面:
1.系统介绍UVW工作平台的结构与工作原理;
2.分析UVW工作平台在精密对位系统中的应用;
3.提出针对UVW工作平台在精密对位系统中的应用的改进意见;
4.实现对UVW工作平台的应用水平提高。
五、进度安排
1.文献调研、资料查阅(1个月);
2.实验观察分析、数据整理(2个月);
3.成果总结、撰写论文(1个月)。
UVW平台在平板显示贴附类设备中的应用与研究
UVW平台在平板显示贴附类设备中的应用与研究胡钦华;衡利斌;郭鹏;杨成春【摘要】为了满足在平板显示贴附类设备中对高精度贴合的要求,设计了一种平面3-PR P 型并联机构UVW 工作平台,并对平台的自由度进行了分析,利用解析法给出了平台精确的运动学正反解模型,并在此基础上对平台产生误差的原因进行了深入分析。
在平台的各种误差中,PR P 支链的对心误差是导致运动学正反解误差的关键,是影响平台精度的主要原因。
%In order to m eet the requirem ents of high precision fitting attached equipm ent in the flat panel display,a kind of U V W w orking platform of 3-PR P parallel m echanism of plane w as designed, and the degree of freedom of the platform w ere analyzed,and the analytical m odel of kinem atics of the positive and negative w as give by analytical m ethod,the errors of the platform are analyzed in depth based on form er research.In all kinds of errors of the platform ,the central error is the key to the error of positive and negative solution of kinem atics in the chain of PR P,w hich is the m ain reason of the platform precision.【期刊名称】《电子工业专用设备》【年(卷),期】2016(000)005【总页数】7页(P29-34,46)【关键词】贴附;视觉对位系统;UVW 平台;并联机构;运动正反解;误差补偿【作者】胡钦华;衡利斌;郭鹏;杨成春【作者单位】中国电子科技集团公司第二研究所,山西太原030024;中国电子科技集团公司第二研究所,山西太原030024;中国电子科技集团公司第二研究所,山西太原030024;中国电子科技集团公司第二研究所,山西太原030024【正文语种】中文【中图分类】TN605当前,国内平板显示产业的发展日新月异,其作为国家战略层面的新兴产业,得到了国家和政府的大力扶持。
AUV视觉系统的可视化技术研究与实现
AUV视觉系统的可视化技术研究与实现
王金华;严卫生;刘旭琳
【期刊名称】《系统仿真学报》
【年(卷),期】2009()12
【摘要】AUV视觉仿真系统是一个能够对AUV视觉系统的软、硬件等进行验证的实时半实物仿真系统。
简要介绍了AUV视觉系统的基本理论,提出了较为完善的AUV半实物仿真系统的研究模型与软件框架;在Vega Prime中利用纹理亮度方法解决了彩色仿真图像灰度化的问题,实现了对黑白摄像管的模拟;采用一种复杂的光线能量衰减公式,逼真的模拟出海底AUV聚光灯效果;该系统同时还提供了对摄像机的简单仿真。
开发和应用结果表明,该系统实时性好,效果逼真,对AUV视觉软、硬件系统开发、测试具有重要的意义。
【总页数】5页(P3846-3849)
【作者】王金华;严卫生;刘旭琳
【作者单位】西北工业大学航海学院
【正文语种】中文
【中图分类】TP391.9
【相关文献】
1.基于触控操作方式的大气科学数据可视化系统技术研究与实现
2.地形可视化系统关键技术研究与实现
3.心肌及心血管系统的四维可视化技术研究与实现
4.一种多
AGV系统的可视化监控技术研究与实现5.双目视觉风洞测量系统实现的关键技术研究
因版权原因,仅展示原文概要,查看原文内容请购买。
一种UVW四轴对位平台[实用新型专利]
![一种UVW四轴对位平台[实用新型专利]](https://img.taocdn.com/s3/m/1c26becb192e45361066f5ee.png)
专利名称:一种UVW四轴对位平台专利类型:实用新型专利
发明人:刘冠林
申请号:CN202021233045.0
申请日:20200629
公开号:CN213259365U
公开日:
20210525
专利内容由知识产权出版社提供
摘要:本实用新型提供一种UVW四轴对位平台,其解决了现有对位平台稳定性差的技术问题;包括相对设置的底板和移动平台,底板和移动平台之间的四角上设有四个旋动支撑组件,每个旋动支撑组件均连接有驱动组件;驱动组件包括电机、通过传动装置与电机连接的滚珠丝杠,旋动支撑组件包括与滚珠丝杠连接的下滑块、连接下滑块和底板的第一导轨、上盖、连接下滑块和上盖的第二导轨以及与移动平台连接的第二轴承,第一导轨、第二导轨相互垂直设置;上盖中部设有凸起的锁紧部,锁紧部外套有第二轴承,第二轴承外套有轴承限位座;锁紧部上方连接有锁紧片,锁紧片外缘覆盖第二轴承的内圈;移动平台设有与锁紧片相对应的通孔。
本实用新型广泛应用于对位平台技术领域。
申请人:元硕机器人(威海)有限公司
地址:264200 山东省威海市环翠区羊亭和兴路186-4座21号
国籍:CN
代理机构:威海恒誉润达专利代理事务所(普通合伙)
代理人:林楠
更多信息请下载全文后查看。
USV平台性能设计的层次分析模糊综合评估
USV平台性能设计的层次分析模糊综合评估马天宇;王涛涛;辛磊;杨松林;姚晓宁【摘要】考虑水面无人艇(USV)平台性能涉及到的各项因素指标,将其分为总体性能、艇体性能和隐蔽性3个方面.运用层次分析法(AHP)和模糊综合评判方法,建立了USV平台性能设计综合评估数学模型,为USV平台性能的设计提供一种新方法和技术体系.在VS2010软件平台上,应用C#语言开发了界面友好的USV平台性能设计的模糊综合评估软件系统,通过对USV平台性能设计方案的算例分析,验证了该系统的可靠性.【期刊名称】《江苏船舶》【年(卷),期】2015(032)001【总页数】4页(P8-10,17)【关键词】水面无人艇;层次分析法;模糊综合评判;C#语言【作者】马天宇;王涛涛;辛磊;杨松林;姚晓宁【作者单位】江苏科技大学船舶与海洋工程学院,江苏镇江212003;江苏科技大学船舶与海洋工程学院,江苏镇江212003;江苏科技大学船舶与海洋工程学院,江苏镇江212003;江苏科技大学船舶与海洋工程学院,江苏镇江212003;江苏科技大学船舶与海洋工程学院,江苏镇江212003【正文语种】中文【中图分类】U6740 引言水面无人艇是一种能够遥控或自主航行的小型无人化水面运动平台[1,2]。
通过搭载不同传感器或设备模块,USV主要用于完成水面巡逻、情报搜集、监视与侦察、反水雷、反潜、中继通信、干扰敌军通信网络、诱杀敌方潜艇、远程火力攻击等不同任务[3]。
近年来,对于USV的研究,在很多方面都取得了显著的进展。
但在水面无人艇平台性能的设计方面,一直缺少理论性的体系指导。
USV平台性能设计过程复杂,随机性较强,因此这是一个值得探讨的问题。
本文以层次分析(AHP)和模糊数学理论为基础,针对USV平台性能设计中的各项因素指标,建立了USV平台性能设计的指标评估体系。
通过C#语言开发了界面友好的USV平台性能设计模糊综合评估软件系统,并通过USV平台性能设计方案算例验证了其可靠性。
UVW对位平台运动学分析及轨迹规划
UVW对位平台运动学分析及轨迹规划
黄梦涛;樊鑫锋
【期刊名称】《机械科学与技术》
【年(卷),期】2024(43)5
【摘要】为控制UVW对位平台匀速运动,对平台做了运动学分析,并针对速度下降问题,设计轨迹规划方案。
首先,以自由度为基础建立平台二维平面模型,求解位置正反解公式,分析奇异位形,构建三维工作空间。
然后,对常用的同步定速法做轨迹分析,由运动轨迹散点图可知:当旋转角绝对值|θ|增大至15°时,平台运动末端速度与初始速度比值下降为0.935,意味着|θ|增大可降低平台运动速度。
最后,结合平台自由度与速度变化规律,设计出等角速度瞬心法。
通过对比可知,使用等角速度瞬心法平台运动速度保持恒定,消除了旋转角θ引起的速度下降。
【总页数】8页(P874-881)
【作者】黄梦涛;樊鑫锋
【作者单位】西安科技大学电气与控制工程学院
【正文语种】中文
【中图分类】TH692.2
【相关文献】
1.精密对位系统中共平面UVW工作平台的研究
2.UVW对位平台运动轨迹规划及实验
3.基于MathCAD的UVW平台对位系统运动分析与验证
4.机器视觉对位中的高精度UVW平台应用方法研究
因版权原因,仅展示原文概要,查看原文内容请购买。