多站时差频差高精度定位技术
三站时差定位GDOP影响因素分析
50
指挥信息系统与技术
2021 年 6 月
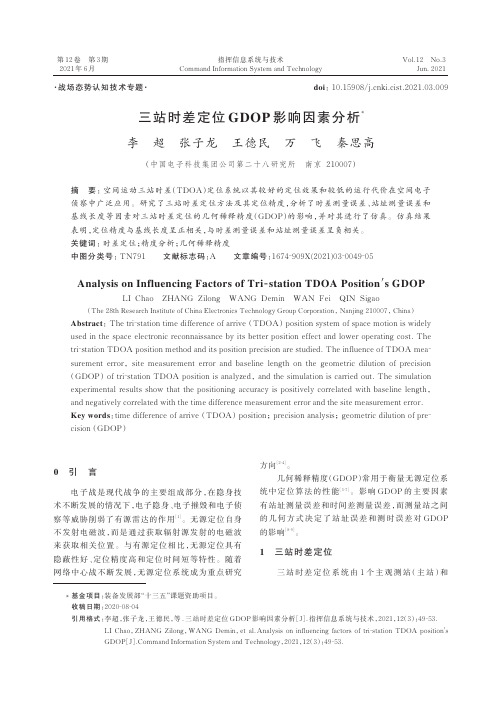
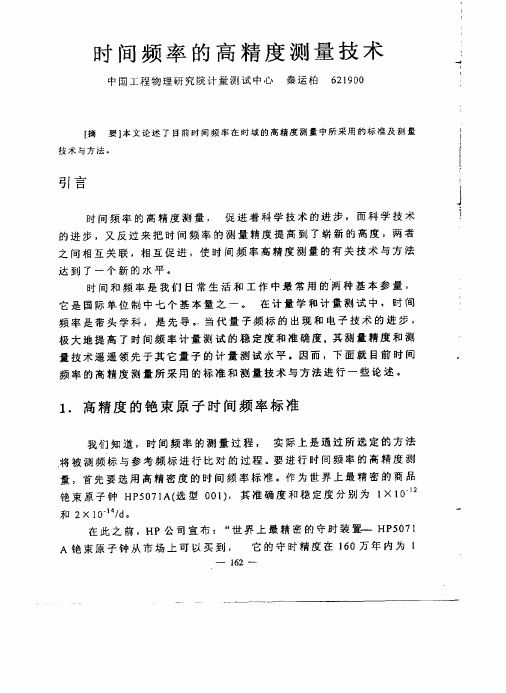
2 个 辅 观 测 站(辅 站)组 成 。 三 站 时 差 定 位 模 型 如 图 1 所 示 ,地 固 坐 标 系 中 ,主 站 位 置 为 S0 ( x0,y0,z0 ), 辅 站 1 位 置 为 S1 ( x1,y1,z1 ),辅 站 2 位 置 为 S2 ( x2,y2,z2 ),目标位置为 T ( x,y,z )。
图 三站时差定位模型 1
设目标发射的雷达探测波到达观测站的时间为 tTOA,tTOA0 为 雷 达 探 测 波 到 达 主 站 的 时 间 ,tTOA1 为 雷 达 探 测 波 到 达 辅 站 1 的 时 间 ,tTOA2 为 雷 达 探 测 波 到 达 辅 站 2 的 时 间 ,因 此 目 标 发 射 的 雷 达 探 测 波 到 达 主站与辅站 1 的时间差为 Δt1 = tTOA1 - tTOA0,到达主 站 与 辅 站 2 的 时 间 差 为 Δt2 = tTOA2 - t 。 TOA0 令 目 标 与观测站的距离如下:
éδ ê
2 ΔR
1
+
2δ2
0
0ù ú
êê 0 ê
δ2 ΔR2
+
2δ2
0úú ú
ë0
(3)
其 中 ,L、B 和 H 分 别 为 目 标 的 经 度 、纬 度 和 高 程 ;N
为 目 标 当 地 卯 酉 圈 半 径 ,随 纬 度 B 缓 慢 变 化 ;e 为 第
一偏心率 。 [10]
一 般 情 况 下 ,由 式(2)和 式(3)联 立 方 程 组 是 无
法 求 解 的 ,只 有 在 进 行 高 程 假 设 后 方 程 组 才 可 求
2 0z
编队卫星时差频差复合定位技术研究
分布式 网络卫星是当前微小卫星研究和应用的一项新
间的相对位置( 基线长度 、方位角和仰角) 进行高精度测
控 ,只要其 三维位 置误差为5~1 米 ,便可利用功能协 O
技术 ,通过修改基线或星间的相对位置 ,可达到优化其拓 扑结构 目的,使最佳测量定位基线组合得以实现。将其具 体应用到编队分布式卫星定位系统中,不但可提供分布式 三维编队飞行的轨道几何关系 ,还可为定位系统提供完善 的定位基线体系,满足定位所需的最佳网络拓扑结构。
卫星为基准 ,由若干颗微小卫星围绕其构成一个特定形 状 ,这个特定几何形状结构 的各颗微小卫星一方面保持
这个形 状 ,同时又绕地 球 中心 旋转 ,它 们 当中每颗小
多个定位接收机 ,对地球表面的发射源( 辐射源) 进行定
位 。在实现整个定位功能时 ,需要多颗卫星利用功能与 结构协同分布 ,通过检测地面辐射源到各星 的时差 和频
可写 为 :
X = r x1p R ) (-) ag ma [ ( 】 43 n
勒(D ) F OA 复合 与综合定 位 ;b 多维基线复合与综合定 . 位 ,多基线复合与综合定位 。 ( 4)定位基线体系构成。在定位过程 ,综合采用 :
线相结合 ,提高定位精度。④利用定位基线平面可转动
特点 ,可实现对敌 目标的低角跟踪测量定位 ,增大覆盖
范 围和连续监视时间。⑤可提供一定长度和一定数量 的
定位基线 ,实现对 目标 的三维定位 。⑥避 开卫星姿态控 制精度要求高的技术难 点。
合 ,对卫星姿态精度要求较低 ,而利用微小卫星进行编队
性 .从 而 为此 项技 术 的深入 研 究提 供 了依 据 。
关 键 词 :编 队 卫 星 ;综 合 定位 ;时差 定 位 ;频 差 定位 ;定位 精 度
高精度导航与定位系统设计
高精度导航与定位系统设计导航与定位系统的快速发展对人们的生活和工作方式带来了革命性的变化。
高精度导航与定位系统是现代社会中不可或缺的一部分,广泛应用于航空航天、智能交通、精准农业、地理测绘等领域。
本文将详细介绍高精度导航与定位系统的设计原理、技术要点以及应用领域。
1. 设计原理高精度导航与定位系统主要依靠卫星导航技术和地面基站数据传输实现。
具体来说,高精度导航与定位系统的设计原理由以下三个方面构成:1.1 卫星导航系统卫星导航系统采用全球定位系统(GPS)或其他类似的系统(如伽利略、北斗),通过卫星信号的接收和测量来确定接收器的位置和速度。
这些卫星通常以固定位置的星座布局在地球上空,通过接收器与卫星之间的通信,定位卫星和接收器之间的距离并计算接收器的位置信息。
卫星导航系统的设计原理主要包括卫星轨道计算、信号接收与处理以及位置解算等。
1.2 数据传输与处理高精度导航与定位系统通过地面基站传输数据到用户设备,实现实时导航和定位功能。
基站通过无线网络将数据传输到用户设备,用户设备则通过接收并处理这些数据来计算其精确位置。
数据传输与处理的设计原理主要包括无线通信协议、数据压缩与加密以及数据传输优化等。
1.3 多传感器融合为了进一步提高导航与定位系统的精度和稳定性,多传感器融合技术被广泛应用。
通过将不同类型的传感器数据进行融合,例如惯性测量单元(IMU)、地磁传感器、气压传感器等,系统可以更准确地估计位置和姿态。
多传感器融合的设计原理主要包括传感器数据融合算法、滤波和校准技术以及误差预测与修正等。
2. 技术要点在高精度导航与定位系统的设计过程中,需要关注以下几个关键技术要点:2.1 高精度数据采集高精度导航与定位系统依赖于精确的数据采集。
所使用的传感器和测量设备需要具备高精度、高灵敏度、低功耗等特点。
同时,采集到的数据需要经过有效的去噪和滤波处理,以确保数据的准确性和可靠性。
2.2 信号处理与解算高精度导航与定位系统需要对接收到的信号进行实时处理和解算。
GPS差分测量与精度提升的技巧与方法
GPS差分测量与精度提升的技巧与方法导语:在现代社会中,GPS(全球定位系统)已经成为人们日常生活中不可或缺的工具之一。
然而,GPS定位的准确度始终是一个备受关注的话题。
本文将介绍GPS差分测量的原理、精度提升的技巧与方法,并探讨其在不同领域的应用。
一、GPS差分测量的原理GPS差分测量是通过同时接收卫星信号的基准站和移动站之间的差分计算,来消除大气延迟、钟差、电离层误差等因素对定位精度的影响。
差分测量的基本原理是基准站和移动站所接收到的相同卫星信号之间的误差可以近似为常数,从而可以通过计算差分值来消除这些误差。
二、提升GPS精度的技巧与方法1. 使用更多的卫星定位精度与可见GPS卫星数量成正比。
因此,在测量中尽可能使用更多的卫星能够提高测量的准确度。
此外,选择高高度角的卫星也可以提高定位的精度。
2. 改善接收环境GPS接收器在复杂的环境中容易受到遮挡和干扰,如高楼大厦、树木、山脉等。
为了提高定位精度,应尽量选择开阔的地方进行测量,避免以上因素对信号的干扰。
3. 准确校正时钟差时钟差是影响GPS定位精度的重要因素之一。
通过准确校正接收器的时钟差,可以消除由于时钟误差引起的定位偏移。
一般来说,使用高质量的GPS接收器和精密的时钟校准设备可以提高定位的准确性。
4. 运用差分增强技术除了普通的差分测量,还可以运用差分增强技术来提升GPS测量的精度。
差分增强技术包括RTK(实时动态差分)和PPK(后处理差分)技术,能够在实时性和准确性方面提供更高的性能。
三、差分测量在不同领域的应用1. 土地测量在土地测量中,差分测量可以提供更精确的坐标和高程数据,有助于绘制详细的地形图和土地界址证明。
这对于土地规划、土地管理和土地交易具有重要意义。
2. 船舶导航差分测量在船舶导航中也具有广泛的应用。
通过使用差分定位系统,船舶可以精确定位,并能够避免与其他船只或障碍物的碰撞。
这对于海上运输和船舶安全至关重要。
3. 农业管理农业管理是另一个差分测量的应用领域。
多站无源时差定位精度分析

多站无源时差定位精度分析邢翠柳;陈建民【摘要】针对在多站无源时差定位系统中影响目标定位精度的因素,分析了时差测量误差和站址误差对目标定位精度的影响。
影响时差测量精度的因素有接收机热噪声、多普勒效应、站间同步误差、本地时钟误差和大气等因素。
通过分析各个因素对目标定位精度的影响程度,在特定布站方式下,仿真计算得到在固定时差测量误差和站址误差下可能达到的目标定位精度,并根据主要误差来源提出相应的提高定位精度的措施。
%Aiming at the factors which affect on the positioning accuracy of TDOA passive location by multi-station,this paper analyzes the influence on target positioning accuracy by error in time difference measurement and station locations.The influence factors on time measurement accuracy include Johnson noise of receiver,Doppler effect,error on time synchronization between stations,local clockerror,influence by atmosphere and so on.The positioning accuracy is got in special station location with error in time difference measurement and station location by simulation.The methods of improving the accuracy of positioning accuracy are given.【期刊名称】《无线电工程》【年(卷),期】2012(042)002【总页数】4页(P32-34,48)【关键词】时差定位;定位精度;时差测量误差;站址误差【作者】邢翠柳;陈建民【作者单位】中国电子科技集团公司第五十四研究所,河北石家庄050081;中国电子科技集团公司第五十四研究所,河北石家庄050081【正文语种】中文【中图分类】TP960 引言多站无源时差定位(TDOA)又称为双曲线定位,是一种重要的无源定位方式,是通过处理3个或更多观测站采集到的信号到达时间测量数据对辐射源进行定位的。
多基站时差频差无源定位处理方法研究

多基站时差频差无源定位处理方法研究多站无源定位技术是电子侦察、电子对抗的一个重要问题,被广泛应用于雷达、导航、声纳、警戒、无线通信、分布式传感器网络等领域。
相对于有源定位系统,无源定位系统具有隐蔽性好、抗干扰能力强、探测距离远等优点。
相对于简易的单站无源定位系统,多站无源定位系统能够综合利用多组观测信息,实现对目标的高精度联合定位。
本文对多站的时差定位(Time Difference Of Arrival,TDOA)、频差(Frequency Difference Of Arrival,FDOA)和时差联合定位、存在基站误差的时差定位等问题进行了研究。
基于TDOA和FDOA的定位问题是高度非线性的,并且相应的目标代价函数具有非凸特征,这样定位问题并不能够简单直接求解。
定位问题的解决方法按照类型可以划分为线性化解法和非线性化解法。
目前大多数研究主要侧重于线性化解法,这些方法通过线性化非线性的TDOA和FDOA方程组来求解目标位置,特点是计算量小,在噪声较小时定位精度能够达到克拉美罗界(Cramer-Rao Bound,CRLB)。
但线性化非线性方程组必然会带来性能上的损失,即在噪声功率达到一定程度时定位误差快速增加,且定位精度远离CRLB。
本文采用非线性的解法求解TDOA定位问题,相对于线性化解法性能更好,在大噪声环境下定位精度更高。
针对非线性解法在初始值选取较差时,算法容易发散的缺点,提出了一种修正牛顿算法(Modified Newton,MNT)。
MNT算法对初值选取不敏感,即在较差初始值时,MNT算法依然能够精确地收敛到目标位置。
对于运动平台的TDOA和FDOA联合定位问题,提出了一种基于时差、频差的两步牛顿算法,将原迭代算法中位置和速度变量的初值选取问题转化为仅位置变量的初值选取问题。
对于存在接收基站误差的TDOA定位问题,提出了一种基于基站误差的两步牛顿算法,该算法减少了由基站位置误差带来的高维Hessian矩阵求逆运算次数,实验结果表明基于基站误差的两步牛顿算法具有更快的收敛速度,并明显降低了运算量。
空间三重差分

空间三重差分
空间三重差分是一种用于高精度定位的技术。
它是基于GPS技术的三重差分技术的改进,可以提高位置测量的精度和可靠性。
下面详细介
绍空间三重差分的原理、优点和应用。
一、原理
空间三重差分是利用多个GPS接收机同时接收来自卫星的信号,并通过计算这些信号之间的相对时间差来确定位置。
具体来说,它利用了
卫星信号在传输过程中受到大气层等因素影响而发生的误差,并通过
多次测量和计算来消除这些误差,从而提高定位精度。
二、优点
1. 高精度:相比于普通GPS技术,空间三重差分可以提高定位精度,达到厘米级别。
2. 可靠性强:由于使用多个接收机同时接收信号并进行计算,所以即
使某个接收机出现故障或受到干扰,也不会影响整个系统的正常工作。
3. 适用范围广:空间三重差分不仅适用于陆地上的测量,还可以在海
洋、天空等环境中进行高精度定位。
4. 实时性好:空间三重差分可以实现实时定位,适用于需要及时获取位置信息的应用场景。
三、应用
1. 海洋测量:空间三重差分可以用于海洋测量中,如船舶定位、海底地形测量等。
2. 精准农业:空间三重差分可以用于农业领域的作物生长监测、施肥管理等。
3. 航空航天:空间三重差分可以用于飞机、卫星等航空航天领域中的精确定位和导航。
4. 地震监测:空间三重差分技术可以用于地震监测和预警,提高地震灾害的预防和应对能力。
总之,空间三重差分技术是一种高精度定位技术,在多个领域有着广泛的应用前景。
高精度卫星定位技术误差分析与改进策略

高精度卫星定位技术误差分析与改进策略高精度卫星定位技术是现代导航和地理信息系统中的关键技术之一,它通过接收卫星信号来确定接收器在地球上的精确位置。
随着科技的发展,高精度卫星定位技术在各个领域,如测绘、交通、农业、事等,都发挥着越来越重要的作用。
然而,这项技术在实际应用中仍然面临着多种误差源,这些误差源可能会影响到定位的精度和可靠性。
本文将探讨高精度卫星定位技术中的误差分析,并提出相应的改进策略。
一、高精度卫星定位技术概述高精度卫星定位技术主要依赖于全球导航卫星系统(GNSS),如的全球定位系统(GPS)、俄罗斯的格洛纳斯(GLONASS)、欧洲的伽利略(Galileo)和中国的北斗导航系统(BDS)。
这些系统通过发射卫星信号,使得地面接收器能够计算出其位置、速度和时间。
1.1 卫星定位技术原理卫星定位技术基于三角测量原理,即通过测量接收器与至少四颗卫星之间的距离,来确定接收器在三维空间中的位置。
接收器通过计算信号传播时间来确定距离,而信号的传播时间与卫星和接收器之间的距离成正比。
1.2 定位技术的应用场景高精度卫星定位技术在多个领域有着广泛的应用,包括但不限于:- 测绘工程:用于地形测绘、土地规划和工程建设。
- 交通导航:提供车辆定位、路线规划和实时导航服务。
- 精准农业:指导农业机械进行精确播种、施肥和收割。
- 事应用:用于定位、导航和武器制导。
二、高精度卫星定位技术的误差分析尽管高精度卫星定位技术在理论上可以提供非常精确的位置信息,但在实际应用中,多种误差源会影响定位的精度。
2.1 卫星误差卫星误差主要包括卫星轨道误差和卫星钟差。
卫星轨道误差是由于卫星轨道模型与实际轨道之间的偏差造成的,而卫星钟差则是由于卫星时钟与标准时间之间的偏差造成的。
2.2 信号传播误差信号传播误差主要包括电离层延迟和对流层延迟。
电离层延迟是由于卫星信号在通过电离层时受到电子密度变化的影响,导致信号传播速度的变化。
对流层延迟则是由于信号在通过对流层时受到温度、湿度和大气压力变化的影响。
北斗高精度定位原理

北斗高精度定位原理
北斗高精度定位是一种基于北斗导航卫星系统的定位技术,它具有较高的精度和可靠性,可以广泛应用于航空航天、智能交通、地质勘探等领域。
北斗高精度定位的原理主要包括以下几个方面:
1. 北斗导航卫星系统:北斗系统由一系列位于地球轨道上的卫星组成,这些卫星向地面发射电磁波信号,接收器可以用来测量信号的到达时间和强度。
2. 多观测值组合:北斗高精度定位利用多颗卫星同时观测目标,通过组合多个观测值来提高定位精度。
常用的组合方法包括载波相位观测值和伪距观测值的组合。
3. 差分定位:差分定位是北斗高精度定位的一种常用技术,它通过将一个已知位置的参考站的观测值和未知位置的用户站的观测值进行比较,来消除测量误差。
差分定位可以提高定位精度,特别是对精密测量要求较高的应用场景。
4. 数据处理和解算:北斗高精度定位还需要进行数据处理和解算,将接收到的信号数据转化为位置、速度等相关信息。
这一过程通常涉及到信号传播延迟、大气误差等因素的校正。
总的来说,北斗高精度定位利用北斗导航卫星系统提供的信号进行观测和测量,通过多观测值组合和差分定位等技术手段来
提高定位精度。
这种定位技术在各种领域的应用中发挥着重要作用。
多站时差和多普勒频差联合定位技术

中可以看出,该方程组为非线性方程组,存在着多
个解。此时结合辅助因素,即可得到目标的真实
位置解。
4 时差一多普勒频差联合定位算法与 仿真
由于实际中多普勒频差定位的精度高于时差 定位的精度,而且不存在时差定位的模糊问题,所 以今后的定位系统将更多考虑使用多普勒频差定位 方法,而更进一步则会把二者结合起来进行定位。 多普勒频差定位需要知道目标速度的大小和方 向,而使用时差定位可以估计出目标运动过程中 两点的位置并由此估计出目标运动的速度矢量。 因此,本文首先使用时差定位估计出目标的运动 方向,然后再使用多普勒频差定位技术修正时差 定位中估计出的目标位置,进一步提高定位精度。
合定位技术的新的发展方向。不过多普勒频差定 位在多站定位时存在多解的情况。本文就4站时 差定位和多普勒频差定位分别作了仿真,并将这 两种定位技术结合起来,从而在一定程度上消除 了模糊和多解问题,提高了定位精度。
2多站时差定位
多站时差定位又称双曲线定位,它是一种较 为精确的定位方法。利用时差的无源定位,通常 要有3个接收站以达到定位精度和消除多值模糊 的目的。本文先对4站的三维时差定位建立非线 性定位方程,并给出定位误差的表达式。目标的 辐射信号到达2站的时间差确定了以2站为焦点 的双曲面,三维定位需要4个被动站产生3对双曲 面,用面面相交得线,线面相交得点来实现定位。
的多普勒频差分别为
可估计出来,设为200 m/s。采用左右两个3站
万方数据
2005年第6期
潘琴格:多站时差和多普勒频差联合定位技术
335
“L”形,用FDOA定位技术对估计的结果进行数据 融合。
三站差分多普勒定位曲线
仿真1 时差定位GDOP图 图1所示为使用TDOA定位时的GDOP图,
一种多标校源的高轨伴星时差频差定位算法

其 中 n n 一n 由于 n , ∽ 方 差相 等且都 是 : n
止目 标辐射源和标校源位别位于 。 c ; 和 。卫星的真 实位置和速度分别为 s、 , 。 。实际得到带有误差的位 置和速度测量值 s= 十 l = 。 l 目标站 、 。 , 、 +,。 标 校源与接收站相对位置示意图如图 1 所示。 在图 1中, 假设伴星的位置和速度分别为 = s + l = + l 那么主星相对于伴星的位置和 ,, ,,
第3卷 第 1 3 0期 21 0 2年 1 0月
宇 航
学
报
Vo. 3 1 3 N0 1 0
.
J u n lo to a t s o r a fAsr n u i c
O tb r 2 1 co e 02
一
种 多标 校 源 的高 轨伴 星 时 差频 差 定 位 算 法
郭连 华 ,郭福 成 ,李金 洲
[ ] 出了基 于 四标 校 源 的 星历 误 差校 正 算法 。该 7提 算法不 但 可 以消 除 时差 频 差 的 系统 测 量 误 差 , 并从
理论上证明了标校源的个数在 四个 或四个 以上时,
所提 出 的算 法可 以消除 由于卫 星星历 不准确 对定 位
结果带来的影响。但是文献 [ ] 7 给出的校正算法通
c lb ai n ai r to s
CL) R B 。但是文献[ —1 ] 8 0 所提算法 只给出了多站
仅测 时差 定 位 体 制下 校 正 ( 收 站位 置 误 差 ) 位 接 定
到主星和伴星的时间差( D A 如下 : TO )
£ =t +n :+ 。 () 1
的算法 , 无法适用于时差频差定位体制。
sr c.I ipoe a tem a u r e o( E fh rpsdm to ol apoc e rme—a w r on uf e ts rvnt th ens ae r r MS )o epooe e dcud p raht a rR ol e ud a h q t h hC o b
基于EKF的星地协同测向时差定位算法

基于EKF的星地协同测向时差定位算法
王哲
【期刊名称】《数字通信世界》
【年(卷),期】2024()4
【摘要】针对无源定位协同化需求,文章提出一种利用到达角、到达时间差的星地协同定位方法,分别研究其定位原理,建立数学定位模型,给出解算方法以及定位精度的表达式,推导基于测向时差参数的扩展卡尔曼滤波(EKF)算法。
仿真结果表明该方法能够达到较高的定位精度;此外,该定位模型仅需单星,避免了传统星载平台定位需要寻找匹配邻星的问题,与机动平台配合,可对辐射源进行快速高效定位,具备一定的工程应用价值。
【总页数】4页(P12-14)
【作者】王哲
【作者单位】中国电子科技集团公司第五十四研究所
【正文语种】中文
【中图分类】TN96;TP18
【相关文献】
1.基于多时刻时差的三星时差定位跟踪算法
2.高精度测向辅助的三星时差定位算法
3.基于EKF的时差定位算法
4.基于EKF的双站测向/时差联合定位算法
5.基于多站时差和多普勒频差联合定位的Singer-EKF算法研究
因版权原因,仅展示原文概要,查看原文内容请购买。
基于WGS-84椭球切平面的双星时差频差定位方法及精度分析

基于WGS-84椭球切平面的双星时差频差定位方法及精度分析何爱林;徐慨;鲍凯;郑士伟【摘要】针对卫星干扰源定位问题,提出了利用地理信息系统及使用WSG-84坐标系的精确定位模型;在此基础上,提出了利用地球圆球面进行解析粗定位与利用WSG-84椭球面切平面进行迭代精定位相结合的综合定位算法,推导了定位算法的理论误差表达式.由仿真结果可知,该系统利用地理信息系统辅助时,相比于时差误差和频差误差带来的系统误差,高程误差带来的系统误差可以忽略.【期刊名称】《弹箭与制导学报》【年(卷),期】2014(034)002【总页数】5页(P160-164)【关键词】TDOA;FDOA;双星定位;误差分析;切平面【作者】何爱林;徐慨;鲍凯;郑士伟【作者单位】海军工程大学电子工程学院,武汉430033;海军工程大学电子工程学院,武汉430033;海军潜艇学院,山东青岛266000;91917部队,北京102400【正文语种】中文【中图分类】P288.10 引言双星TDOA/FDOA联合定位方式相对于三星、四星等多星定位而言减少了定位平台数量,降低了系统的实现难度和发射成本,且卫星的移动的速度很快,产生的多普勒频差大,有利于定位精度的提高。
因此,对于天基无源定位系统来说,采用TDOA/FDOA定位方式是一种非常有吸引力的方案[1]。
文中提出利用地理信息系统提供高程辅助信息,且利用WGS-84切平面来代替椭球表面,在不损失定位精度的情况下对地面干扰源定位的方法。
相比于文献[9],文中提出的方法具有更高的定位精度;相比于文献[10]的数字地图,文中所采用的地理信息系统具有更高的精度,更能满足现代战争的精度打击需要。
1 模型的建立在地固坐标系中,设两颗卫星的位置坐标分别记为,速度分别记为v1= [vx1,vy1,vz1]T和v2= [vx2,vy2,vz2]T,目标辐射源的位置矢量记为u= [x,y,z]T。
根据电磁波在空间的传播规律,得到如下的TDOA和FDOA方程组:其中:△r=c△t,△t为干扰信号到达两个卫星的时间差,c为光波的传播速度;△v r=-△f dλ,△f d为两颗卫星的多普勒频率差,λ为干扰信号的波长。
时间频率的高精度测量技术
它 是 国际 单 位 制 中七 个 基本量 之 一 。 在 计 量 学和计 量测 试 中 ,时 间
频率是带头学科 ,是先导 。当代 量子频标 的出现和电子技术 的进 步 , 极大地提高了时间频率计量测试的稳定度和准确度, 其测量精度和测 量技术遥遥领先于其它量子的计量测试水平.因而,下面就 目前时间
此 我 们 已建 立 了频 差 倍 增 测 量 系 统 来 对 时 间 频 率 进 行 高精 度 的 测 量 。根据这种原理制作 的装 置通 常称 为频 差倍增 器 ( 也称 比较器 、比 对 器 、测频器等 ),它是频 率测量 的基 本 组成 部分 , 目前 。频 差倍
司!
增器的倍增次数一般最高为 1 0 0 至 1 0 5 ,它可使频率测量系统的测量 精度达到 1 0 - 1 “ 至1 0 - 1 3 ( 闸门时间为 l o o s 时 )量级。 所谓频差倍增法, 就是将被测频率 f . 与参考频标 f , 之间的差值
为
A f l f 二 2 . 3 x 1 0 - 1 4
根据这一基本原理,我们利用 1 2 0 5 数字 比相仪、艳束原子频标
和微型计算机组建了时 频坷准相 . 位比 较侧f系 ; 统・ 若 将5 M H : 的 频标
术 ,其线路结构简单,测t分辨率高 .它主要适用于长时间指标 的测 量, 尤其适用于两个相同频 标长稳指标 的昼夜 比较测量而无须人员看 守 。这一 系统的建立 ,它 能够完成 目前 高精度 时频标准 中的精确测
代 产 品大 为增 加 。
2 .测量技术与方法
2 . 1频差倍增法
在进行时间频率的高精度测 量时,不仅要选择高精密度 的时间
时差定位原理

时差定位原理
时差定位原理是一种利用信号传播时间差来确定物体位置的技术。
它广泛应用于雷达、GPS、无线电定位等领域,是现代导航和通信技术的重要基础。
时差定位原理的基本思想是,当一个信号源向不同的接收器发射信号时,由于信号传播速度的不同,信号到达各个接收器的时间也不同。
通过测量这些时间差,可以计算出信号源的位置。
这种方法的精度取决于信号传播速度的稳定性和测量时间的精度。
在雷达应用中,时差定位原理被广泛用于目标跟踪和导航。
雷达发射的电磁波在空气中传播速度为光速,当它遇到物体时会被反射回来。
接收器接收到反射波后,通过测量发射和接收的时间差,可以计算出物体的距离和方向。
这种方法可以在不同天气条件下进行,因此在军事、航空、海洋等领域得到广泛应用。
在GPS应用中,时差定位原理被用于卫星定位。
GPS系统由一组卫星和地面接收器组成,卫星发射的信号包含了卫星的位置和时间信息。
接收器接收到多个卫星的信号后,通过测量信号到达时间差,可以计算出接收器的位置。
这种方法的精度可以达到几米甚至更高,因此在导航、地图制作、车辆追踪等领域得到广泛应用。
时差定位原理是一种基于信号传播时间差的定位技术,它在雷达、GPS、无线电定位等领域得到广泛应用。
随着技术的不断发展,时
差定位原理的精度和应用范围也在不断扩大,为人类的生产和生活带来了更多的便利和效益。
多源机会信号飞行器EKF_融合导航方法
引用格式:刘俊妧, 陈渲文, 张少莉, 等. 多源机会信号飞行器EKF 融合导航方法[J]. 中国测试,2023, 49(12): 94-100. LIU Junyuan, CHEN Xuanwen, ZHANG Shaoli, et al. Aircraft EKF fusion navigation method based on multi-source opportunity signals[J]. China Measurement & Test, 2023, 49(12): 94-100. DOI: 10.11857/j.issn.1674-5124.2023060057多源机会信号飞行器EKF 融合导航方法刘俊妧1, 陈渲文2, 张少莉1, 陈 森2(1. 中国飞行试验研究院,陕西 西安 710089; 2. 陕西师范大学数学与统计学院,陕西 西安 710119)摘 要: 该文考虑多源异构机会信号情况下的飞行器导航问题,提出一种新型扩张卡尔曼滤波融合导航方法。
首先,针对5类典型的机会信号,构建机会信号测量值模型。
然后,采用中心式交互结构,设计可自由增减导航机载模块的融合导航框架,具体包括3部分:局部机载设备的定位预报模块、局部机载设备的测量更新模块、中心融合计算模块。
通过交互中心融合计算模块与局部机载设备的信息,迭代更新当前飞行器的位置预估值。
进一步,给出所提出融合导航方法的误差分析结果,并且建立基于估计误差方差最小化的融合权重优化选取方案。
关键词: 机会信号导航; 扩张卡尔曼滤波; 融合滤波; 到达时间; 到达角度中图分类号: TN966文献标志码: A文章编号: 1674–5124(2023)12–0094–07Aircraft EKF fusion navigation method based on multi-source opportunity signalsLIU Junyuan 1, CHEN Xuanwen 2, ZHANG Shaoli 1, CHEN Sen 2(1. Chinese Flight Test Establishment, Xi’an 710089, China; 2. School of Mathematics and Statistics, Shaanxi NormalUniversity, Xi’an 710119, China)Abstract : This paper considers the navigation of aircraft with multi-source heterogeneous opportunity signals,and proposes a new extended Kalman filter based fusion navigation method. Firstly, the measurement models of five typical types of opportunity signals are presented. Then, the fusion navigation framework is constructed by using a centralized interactive structure, which can expediently increase or decrease navigation airborne modules. The fusion navigation contains three parts: the position prediction module of local airborne equipment, the measurement based update module of local airborne equipment, and the central fusion calculation module. By fusing the information of the calculation module in interaction center and local airborne equipment, the estimated position of the current aircraft is iteratively updated. Furthermore, the error analysis results of the proposed fusion navigation method are presented, and the optimal selection of fusion weight based on minimizing the variance of estimation error is established.Keywords : navigation via signal of opportunity; extended Kalman filter; fusion filtering; arrival of time;arrival of angle收稿日期: 2023-06-12;收到修改稿日期: 2023-08-16基金项目: 国家自然科学基金资助项目(62003202);陕西省科学技术协会青年人才托举计划项目(20230513)作者简介: 刘俊妧(1992-),女,陕西汉中市人,工程师,硕士,研究方向为机载电子设备飞行试验。
多校准站TDOAFDOA无源定位方法
开放科学( 资源服务) 标识码( OSID) :
微信扫描二维码 听独家语音释文 与作者在线交流
中图分类号:TN97;V556摇 摇 文献标志码:A摇 摇 文章编号:1001-893X(2019)01-0076-06
A TDOA and FDOA Source Passive Localization Method Using Calibration Emitters
多校准站 TDOA / FDOA 无源定位方法*
禹华钢**1 ,汪汇川2
(1. 解放军 91469 部队,北京 100841;2. 解放军 92232 部队,北京 100161)
摘摇 要: 针 对 运 动 目 标 到 达 时 差 ( Time Difference - of - Arrival, TDOA ) / 到 达 频 差 ( Frequency Difference-of-Arrival,FDOA) 定位中的接收站定位误差问题,提出了基于多校准站的 TDOA / FDOA 定位方法,有效降低接收站定位误差的影响,并推导了该方法的克拉美罗下限( Cram佴r -Rao Lower Bound,CRLB) 。 理论分析表明,采用多校准站法能有效降低 CRLB,提高目标定位精度。 同时,当校 准站自身定位存在误差时,也将影响对接收站的校准和目标的定位精度。 通过仿真实验定量分析了 采用多校准站法对定位精度的改善程度。 关键词:目标定位;无源定位;多校准站;克拉美罗下限;到达时差;到达频差
第 59 卷 第 1 期 2019 cation Engineering
Vol. 59,No. 1 January,2019
doi:10. 3969 / j. issn. 1001-893x. 2019. 01. 013
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
关 键 词 : 源 定位 ; 差 ; 无 时 多普 勒 频 差 ; rme— a C a rR o下界
中 图 分 类i e o ain w t u t sa in Usn DOA/ DOA M e s r me t t rL c t i M l —t t i gT t o h i o F au e n s
An a p o c o r v d n i h y a c r t p r a h f rp o i i g h g l c u a e FDOA s i t s o h o e e tr d r p l et a n i e tma e ft e c h r n a a u s r i s
出了利 用相 参 脉 冲 串实现 雷达 信 号 高精 度 频 差 测 量 方 法 , 导 了无 模 糊 频 率估 计 的 充要 条 件 及 相 参 脉 冲 串测频 推
的 C L 仿 真及 实验 室 测试 结 果证 明 了在 一 定 条件 下 可 实 现 对相 参 雷 达信 号 的 Hz 测 量 精 度 , 工 程应 用具 R B, 级 对
摘 要 : 对 多站 时 差 频 差 联 合 定 位 系统 , 针 建立 了 定位 模 型 , 导 了定 位 误 差表 达 式 并 作 了仿 真 分析 。仿 真 结 果表 推
明, 观测站构型较差的情况下 , 在 多站 时 差频 差联 合 定位 与 纯 时 差 或频 差 定位 相 比 可提 高定 位 精 度 。 文 同时提 本
Z u Weq a g ,H u n ia g ,Ma Qi Xi h iin a g Pek n n ,L n
( .No 8 1 s ac n t ue,Chn r s a eS in ea d Id sr r o ain,Na j g,2 0 0 ,Chn ; 1 . 5 1Re e rh I si t t ia Ae o p c ce c n n u tyCo p r to ni n 10 7 ia
多 站 时差 频 差 高精 度定 位 技术
朱 伟 强 黄 培 康 。 马 琴 卢 鑫
(. 国 航 天 科 工 集 团 8 1 研 究 所 , 京 , 1 0 72 中 国航 天 科 工 集 团 科 技 委 员 会 , 京 ,0 8 4 1中 5l 南 2 0 0 ;. 北 105)
p o o e .B t h f( e e s r n u f in )c n iin o n mbg o sfe u n ye tma rp sd o ht ei n c s a ya ds fi e t o dt sfru a iu u rq e c si — f c o t n a d t eCr m6 - o lwe o n ( i n h a rRa o r b u d CRLB)a e p e e td Sm ua in a d lb tsi g r— o r r s n e . i lto n a e t e n
B i l t n,i i d mo sr td t a h o ie y smu ai o t s e n ta e h tt e c mbn d TDOA/ FDOA e h iu u p ro ms i tc nq eo t e fr t s
TDOA— nl o y or FDOA— l o on y c unt r rs,e e n t a e o oo o l c o —a ge ome r e pa t v n i he c s f p r c le t r t r tge t y.
2 Th ce c n c n l g o . e S in e a d Te h o o y C mmit e t e ,Ch n r s a e S in e a d I d s r r o a i n, i a Ae o p c ce c n n u ty Co p r t o
第 2卷 第 3 5 期
21 0 0年 5月
数
据
采
集
与
处
理
V o1 5 N o.3 .2 M a O1 y2 O
i r c sig J u n lo t q iio & P o e sn o r a fDa a Ac ust n
文 章 编 号 : 0 4 9 3 ( 0 0 0 — 3 70 1 0 — 0 7 2 1 ) 30 0 — 6
( TDO A )a d fe u n yd fe e c fa rv l( n r q e c i rn eo ria FDOA )i e tb ih d f rt e mu t—tto o i f s sa l e o h li ain p s— s s
to y t ms,a d f r u a o s i tn he u e t i is i he e te oc to r e i d. in s se n o m l s f r e tma i g t nc r ante n t mit rl a i n a e d rve
Bej g,1 0 5 ,Chn ) in i 084 ia
Ab ta t sr c :Th lo i m d lo h on — o iinn a e n tme d fee c f a rv l e ag rt h mo e f t e ji tp st ig b s d o i i r n e o ria o ' f