水箱液位单回路控制系统
实验五、单容水箱液位PID控制实验(DCS)

实验五、单容水箱液位PID控制实验(DCS)一、实验目的1)、熟悉单容水箱液位反馈PID控制系统硬件配置和工作原理。
2)、熟悉用P、PI和PID控制规律时的过渡过程曲线。
3)、定性分析不同PID控制器参数对单容系统控制性能的影响。
二、实验设备CS4000型过程控制实验装置,DCS系统、 PC机,监控软件。
三、实验原理一阶单容水箱PID控制方框图图为单回路上水箱液位控制系统。
单回路调节系统一般指在一个调节对象上用一个调节器来保持一个参数的恒定,而调节器只接受一个测量信号,其输出也只控制一个执行机构。
本系统所要保持的参数是液位的给定高度,即控制的任务是控制上水箱液位等于给定值所要求的高度。
根据控制框图,这是一个闭环反馈单回路液位控制,采用EPA系统控制。
当调节方案确定之后,接下来就是整定调节器的参数,一个单回路系统设计安装就绪之后,控制质量的好坏与控制器参数选择有着很大的关系。
合适的控制参数,可以带来满意的控制效果。
反之,控制器参数选择得不合适,则会使控制质量变坏,达不到预期效果。
一个控制系统设计好以后,系统的投运和参数整定是十分重要的工作。
一般言之,用比例(P)调节器的系统是一个有差系统,比例度δ的大小不仅会影响到余差的大小,而且也与系统的动态性能密切相关。
比例积分(PI)调节器,由于积分的作用,不仅能实现系统无余差,而且只要参数δ,Ti调节合理,也能使系统具有良好的动态性能。
比例积分微分(PID)调节器是在PI调节器的基础上再引入微分D的作用,从而使系统既无余差存在,又能改善系统的动态性能(快速性、稳定性等)。
但是,并不是所有单回路控制系统在加入微分作用后都能改善系统品质,对于容量滞后不大,微分作用的效果并不明显,而对噪声敏感的流量系统,加入微分作用后,反而使流量品质变坏。
对于我们的实验系统,在单位阶跃作用下,P、PI、PID调节系统的阶跃响应分别如下图中的曲线①、②、③所示。
P、PI和PID 调节的阶跃响应曲线四、实验步骤(1)关闭出水阀,将CS4000 实验对象的储水箱灌满水(至最高高度)。
(最新整理)水箱液位控制系统

(完整)水箱液位控制系统编辑整理:尊敬的读者朋友们:这里是精品文档编辑中心,本文档内容是由我和我的同事精心编辑整理后发布的,发布之前我们对文中内容进行仔细校对,但是难免会有疏漏的地方,但是任然希望((完整)水箱液位控制系统)的内容能够给您的工作和学习带来便利。
同时也真诚的希望收到您的建议和反馈,这将是我们进步的源泉,前进的动力。
本文可编辑可修改,如果觉得对您有帮助请收藏以便随时查阅,最后祝您生活愉快业绩进步,以下为(完整)水箱液位控制系统的全部内容。
课程设计报告设计题目:水箱液位控制系统班级:自动化0901班学号:20092395姓名:郝万福指导教师:王姝梁岩设计时间:2012年5月7号----5月25号摘要在人们生活以及工业生产等诸多领域经常涉及到液位和流量的控制问题, 例如居民生活用水的供应,饮料、食品加工等多种行业的生产加工过程,通常需要使用蓄液池,蓄液池中的液位需要维持合适的高度, 既不能太满溢出造成浪费, 也不能过少而无法满足需求。
因此液面高度是工业控制过程中一个重要的参数,特别是在动态的状态下,采用适合的方法对液位进行检测、控制,能收到很好的效果。
在这次课程设计中,我们主要是设计一个水箱液位控制系统,涉及到液位的动态控制、控制系统的建模、PID 参数整定、传感器和调节阀等一系列的知识。
通过将电磁流量计和涡轮流量计分别作为主管道和副管道控制系统的调节阀控制水箱液位高度.首先测取被控液位高度过程的图像,建立了主回路的进水流量和主管道流量、进水流量和水箱(上)液位高度、副回路进水流量和水箱(上)液位、双容水箱的进水流量和水箱(下)液位之间的数学模型,从而加强了对液位控制系统的了解。
然后,通过参数试凑法对PID参数的调试,使上述的模型能快速的达到稳定并且超调量和余差等满足设计要求。
最后通过MATLAB仿真实验,加深了对双容水箱滞后过程以及串级水箱液位过程和前馈控制系统的理解,对工业控制工程中对控制系统设计过程有了一定的认识。
单容水箱液位控制系统的设计
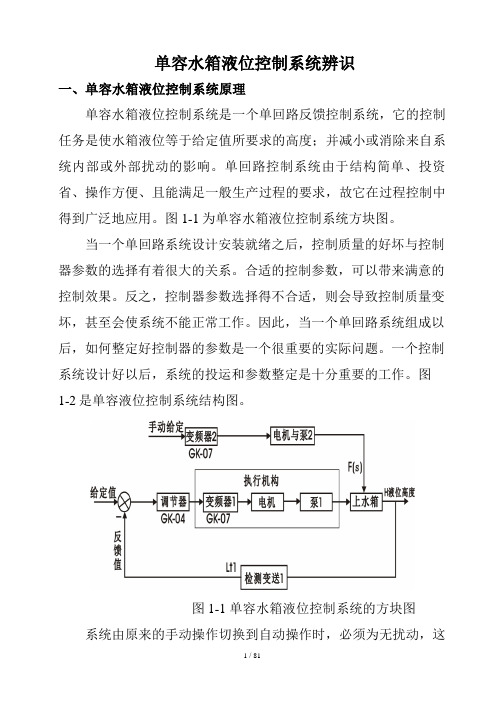
单容水箱液位控制系统辨识一、单容水箱液位控制系统原理单容水箱液位控制系统是一个单回路反馈控制系统,它的控制任务是使水箱液位等于给定值所要求的高度;并减小或消除来自系统内部或外部扰动的影响。
单回路控制系统由于结构简单、投资省、操作方便、且能满足一般生产过程的要求,故它在过程控制中得到广泛地应用。
图1-1为单容水箱液位控制系统方块图。
当一个单回路系统设计安装就绪之后,控制质量的好坏与控制器参数的选择有着很大的关系。
合适的控制参数,可以带来满意的控制效果。
反之,控制器参数选择得不合适,则会导致控制质量变坏,甚至会使系统不能正常工作。
因此,当一个单回路系统组成以后,如何整定好控制器的参数是一个很重要的实际问题。
一个控制系统设计好以后,系统的投运和参数整定是十分重要的工作。
图1-2是单容液位控制系统结构图。
图1-1 单容水箱液位控制系统的方块图系统由原来的手动操作切换到自动操作时,必须为无扰动,这就要求调节器的输出量能及时地跟踪手动的输出值,并且在切换时应使测量值与给定值无偏差存在。
图1-2 是单容水箱液位控制系统结构图。
一般言之,具有比例(P )调节器的系统是一个有差系统,比例度δ的大小不仅会影响到余差的大小,而且也与系统的动态性能密切相关。
比例积分(PI )调节器,由于积分的作用,不仅能实现系统无余差,而且只要参数δ,Ti 选择合理,也能使系统具有良好的动态性能。
图1-2 单容液位控制系统结构图比例积分微分(PID )调节器是在PI 调节器的基础上再引入微分D 的作用,从而使系统既无余差存在,又能改善系统的动态性能(快速性、稳定性等)。
在单位阶跃作用下,P 、PI 、PID 调节系统的阶跃响应分别如图1-3中的曲线①、②、③所示。
T( c).1e ss231图1-3 P、PI和PID调节的阶跃响应曲线二、单容水箱液位控制系统建模2.1 液位控制的实现液位控制的实现除模拟PID调节器外,可以采用计算机PID算法控制。
水箱液位单回路控制系统

水箱液位单回路控制系统一、控制目的根据设定的控制对象和管道配置,运用计算机和INTOUCH组态软件,设计一套监控系统,并通过调试使得水箱液位维持恒定或保持在一定的误差范围内。
二、性能要求1、要求水箱液位恒定,液位设定值SP自行给定。
2、无扰动时,水压基本恒定,由变频器控制水泵实现。
3、扰动因数:水箱出水流量允许波动。
4、预期性能:响应曲线为衰减震荡;允许存在一定误差。
调整时间尽可能短。
三、方案设计、控制规律选择简单控制系统一般是单回路控制系统。
由于其结构简单并且能够满足大多数控制质量的要求,因此在生产过程控制中得到了广泛的应用,是生产过程控制中最基本的一种控制系统。
一个单回路反馈系统是由测量变送器装置、控制器、和被控对象所组成,按其被控变量类型的不同可以分为温度控制系统、压力控制系统、流量控制系统、液位控制系统等。
控制系统设计时针对某一特定生产对象进行的,当系统安装完成之后,控制效果主要取决于控制器的参数设定整定。
选择合适的比例度、积分时间、微分时间是保证和提高系统控制质量的主要途径。
单回路水箱的原理,系统地输入变量为进水阀门、出水阀门的开度,输出变量为水箱液位。
单回路PID控制的被控制量是水位,控制量是进水门、出水门开度。
通过调节PID控制器的比例增益、积分时间、微分时间三个参数得到比较好的控制效果。
PID 调节器构成的闭环控制回路一般原理如图1 所示图1 控制系统方框图控制系统草稿图如图2图2控制规律选择:目前工业上常用的控制规律主要有:比例控制、比例积分控制和比例积分微分控制等。
本方案采用比例积分微分控制。
比例控制——克服干扰能力强、控制及时、过渡时间短。
是最基本的控制规律。
但在终了时会存在余差,负荷变化越大余差越大。
使用于滞后较小、负荷变化不大、允许被控变量存在余差的场合。
比例积分控制——在比例作用下引用积分作用,虽然会使系统的稳定性降低,但没有余差。
适用于控制通道滞后较小、负荷变化不大、不允许被控变量存在余差的场合。
单容水箱液位控制系统的设计
单容水箱液位控制系统辨识一、单容水箱液位控制系统原理单容水箱液位控制系统是一个单回路反馈控制系统,它的控制任务是使水箱液位等于给定值所要求的高度;并减小或消除来自系统内部或外部扰动 的影响。
单回路控制系统由于结构简单、投资省、操作方便、且能满足一般 生产过程的要求,故它在过程控制中得到广泛地应用。
图 1-1为单容水箱液位控制系统方块图。
当一个单回路系统设计安装就绪之后,控制质量的好坏与控制器参数的 选择有着很大的关系。
合适的控制参数,可以带来满意的控制效果。
反之, 控制器参数选择得不合适,则会导致控制质量变坏,甚至会使系统不能正常 工作。
因此,当一个单回路系统组成以后,如何整定好控制器的参数是一个 很重要的实际问题。
一个控制系统设计好以后,系统的投运和参数整定是十 分重要的工作。
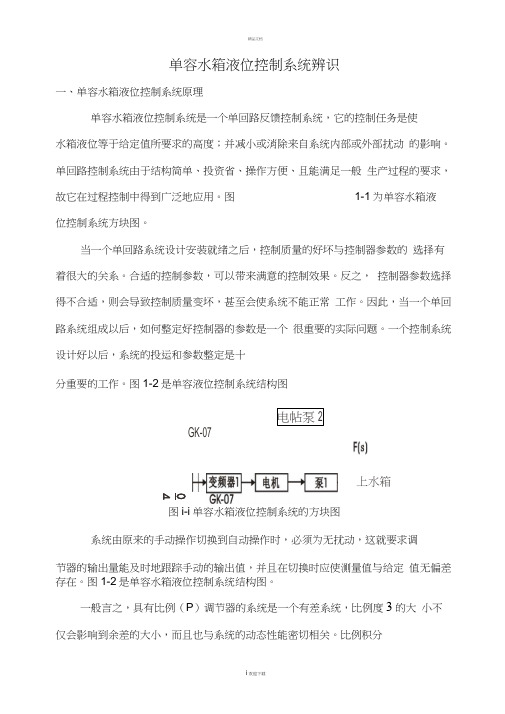
图1-2是单容液位控制系统结构图GK-07图i-i 单容水箱液位控制系统的方块图系统由原来的手动操作切换到自动操作时,必须为无扰动,这就要求调节器的输出量能及时地跟踪手动的输出值,并且在切换时应使测量值与给定 值无偏差存在。
图1-2是单容水箱液位控制系统结构图。
一般言之,具有比例(P )调节器的系统是一个有差系统,比例度3的大 小不仅会影响到余差的大小,而且也与系统的动态性能密切相关。
比例积分电帖泵204上水箱(PI)调节器,由于积分的作用,不仅能实现系统无余差,而且只要参数3, Ti选择合理,也能使系统具有良好的动态性能。
图1-2单容液位控制系统结构图比例积分微分(PID)调节器是在PI调节器的基础上再引入微分D的作用,从而使系统既无余差存在,又能改善系统的动态性能(快速性、稳定性等)。
在单位阶跃作用下,P、PI、PID调节系统的阶跃响应分别如图1-3中二、单容水箱液位控制系统建模2.1液位控制的实现液位控制的实现除模拟PID调节器外,可以采用计算机PID算法控制。
首先由差压传感器检测出水箱水位;水位实际值通过单片机进行A/D转换,变成数字信号后,被输入计算机中;最后,在计算机中,根据水位给定值与实际输出值之差,利用PID程序算法得到输出值,再将输出值传送到单片机中,由单片机将数字信号转换成模拟信号。
单容水箱单回路液位控制工艺流程简介
单容水箱单回路液位控制工艺流程简介下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by theeditor.I hope that after you download them,they can help yousolve practical problems. The document can be customized andmodified after downloading,please adjust and use it according toactual needs, thank you!In addition, our shop provides you with various types ofpractical materials,such as educational essays, diaryappreciation,sentence excerpts,ancient poems,classic articles,topic composition,work summary,word parsing,copy excerpts,other materials and so on,want to know different data formats andwriting methods,please pay attention!单容水箱单回路液位控制工艺流程简介在工业生产中,液位控制是一项重要的自动化任务,它涉及到各种液体的存储、输送和处理。
单回路双容水箱液位控制系统组态软件课程设计

摘要随着科技的进步,自动化逐步走进千家万户。
本学期在修完《监控系统程序设计技术》课程后,运用工业监控系统组态软件(MCGS),结合一个自动控制系统,学生自选题目进行工程设计。
本次设计的工程系统是“单回路双容水箱液位控制系统”。
通过查阅相关资料,了解到单回路双容水箱的液位控制采用PID调节方法,设定水位与实际水位的偏差和水泵电压信号构成PID调节的输入与输出单回路双容水箱液位控制系统充分体现着自动化技术的优越性,通过简单操作来实现水箱液位的自动控制。
其主要目的是:根据用户的需求,按照用户所设定的水箱液位值,系统自动识别并给出相应的电压信号,控制进水流量,从而控制水箱液位达到设定液位。
此外在操作方面,该系统紧密联系实际,可以进行手动控制和自动控制的自由切换。
同时为了便于用户使用和实时监控,该系统设置了多项曲线和报表显示窗口,以及多个显示标签。
在安全机制方面,在操作权限上根据实际情况进行人员分组管理设置,并设有密码,以便提高系统的安全性能。
通过本次课设学生不仅对课程内容更加了解,通过也提高了学生的动手实践和设计能力。
关键词:水位控制;PID;课程设计;自动化AbstractWith the progress of science and technology, automation and gradually into thethousands of households. This semester in completing the "program" monitoringsystem design technology course, the use of industrial monitoring systemconfiguration software (MCGS), combined with an automatic control system,students choose the subject of Engineering design. Engineering system of this design is a "single loop and double tank water level control system".Through access to relevant information, understanding to the level of single loopcontrol of two tank using PID regulation method, set the water level and theactual waterlevel deviation and the pump voltage signal to form the PID input and output regulation Single loop and double tank water level control system, fully embodies theadvantages of automation technology, through simple operation to realize the automatic control of tank level. Its main purpose is: according to the needs of users, according tothe water level set by the user value, automatic identification system and the corresponding voltage signal, water flow control, so as to control the water level reaches a set level. In addition, in the operation of the system,close connection is actual, can be manually controlled and free switch automatic control. At the same time in order to facilitate the use of the user and the real-time monitoring, the system has set up a number of curves and report display window, and a plurality of display tag. In a safe mechanism, set inthe personnelgrouping management operation authority based on the actual situation, and is provided with a password, so as to improve the safety performance of the system.Through this lesson student not only learn more about the content of thecourse,through hands-on practice and also improve the students' ability to design.Key Words:Water level control ;PID; Curriculum design; Automation目录摘要 (I)Abstract (II)第1章选题及工艺流程分析说明 (1)1.1 系统概述 (1)1.1.1 选题想法 (1)1.1.2 设计思路 (1)1.2 组态设计的目标 (2)1.3 PID控制原理 (3)1.3.1PID概况 (3)1.3.2系统串级控制方案设计 (5)第2章MCGS工程组态 (7)2.1 主控窗口设计 (7)2.2 设备窗口设计 (8)2.3 用户窗口设计 (8)2.4 实时数据库设计 (11)2.5运行策略设计 (12)2.6脚本程序设计 (12)第3章仿真 (15)3.1 运行结果分析 (15)3.2 组态设计和调试中遇到的问题、解决方法和结果 (15)3.2.1 遇到的问题 (15)3.2.2 解决方法和结果 (15)第4章总结 (16)参考文献 (17)第1章选题及工艺流程分析说明在工业实际生产中,液位是过程控制系统的重要被控量,在石油﹑化工﹑环保﹑水处理﹑冶金等行业尤为重要。
水箱液位控制系统

水箱水位控制系统设计一、系统结构原理1.1自动控制系统的组成(1)自动控制系统由控制对象和制动控制设备组成。
即由控制对象、传感器、控制器和执行器所组成的闭环控制系统。
(2)所谓控制对象是指所需控制的机器、设备、或生产过程。
(3)被控参数是所需控制和调节的物理量或状态参数化,即控制对象的输出信号,如房间温度、水箱水位。
(4)被控参数的预定值(或理想值)称为给定值(设定值)。
给定值与被控参数的测量值之差称为偏差。
(5)扰动是指除给定输入之外,对系统的输出有影响的信号的总称。
(6)传感器是指把被控参数成比例地转变为其他物理量信号(如电阻、电势、电流、气压、位移)的元件或仪表,如热电阻、热电偶等,如果传感器所发出的信号与后面控制所要求的信号不一致时,则需要增加一个变送器,将传感器的输出信号转换成后面所要求的信号。
(7)控制器是指将传感器送来的信号与给定值进行比较,根据比较结果的偏差大小,按照预定的控制规律输出控制信号的原件或仪表。
(8)执行器是动力部件,它根据控制器送来的控制信号大小改变调节阀的开度,对控制对象施加控制作用,使被控参数保持在给定值。
1.2 水箱水位结构原理水箱尺寸:长×宽×高=25×20×40 液位控制系统由被控水箱1、蓄水箱2液位检测仪表差压变送器LT 、调节器LC 、调节阀等组成。
3cm二、系统控制要求及指标2.1水箱水位的控制要求:液位L=30cm(可任意设置)稳态误差ess(余差)≤±5mm过度时间ts≤4分钟衰减比n>4:12.2对自动控制控制系统的基本要求:(1) 稳定性:稳定性是对控制系统最基本的要求。
所谓系统稳定,一般指当系统受到扰动作用后,系统的被控制量偏离了原来的平衡状态,但当扰动撤离后,经过若干时间,系统若仍能返回到原来的平衡状态,则称系统是稳定的。
(2) 准确性:给定稳态误差和扰动稳态误差越小,表示稳态精度也越高。
PLC课程设计单容水箱液位控制系统的设计
目录封面--------------------------1 目录--------------------------2 引言--------------------------3 一、总体设计方案--------------4基本任务----------------------4 基本要求----------------------4 主要性能指标------------------ 4 扩展功能----------------------4 控制方法选择------------------ 4 系统组成----------------------5 二、控制系统设计-------------- 5控制程序流程图----------------- 5 控制程序设计思路--------------- 6 系统变量定义及分配表----------- 6 系统接线图设计----------------- 6 三、系统调试及结果分析--------7系统调试-----------------------7 结果分析-----------------------8 结束语---------------------8 参考文献-------------------8 附录:源程序图-----------------9引言在人们生活以及工业生产等诸多领域经常涉及到液位和流量的控制问题, 例如居民生活用水的供应, 饮料、食品加工, 溶液过滤, 化工生产等多种行业的生产加工过程, 通常需要使用蓄液池, 蓄液池中的液位需要维持合适的高度, 既不能太满溢出造成浪费, 也不能过少而无法满足需求。
由于液体本身的属性及控制机构的摩擦、噪声等的影响,控制对具有一定的纯滞后和容量滞后的特点,液位上升的过程缓慢,呈非线性。
因此液位控制装置的可靠性与控制方案的准确性是影响整个系统性能的关键,因此液面高度是工业控制过程中一个重要的参数,特别是在动态的状态下,采用适合的方法对液位进行检测、控制,能收到很好的效果。
实验2 液位单回路控制系统的设计、分析与调试

实验2 液位单回路控制系统的设计、分析与调试一、实验目的1、通过实验熟悉单回路反馈控制系统的组成和工作原理;2、分析分别用P、PI和PID调节时的过程图形曲线;3、定性地研究P、PI和PID调节器的参数对系统性能的影响。
二、实验设备AE2000B型过程控制实验装置三、实验原理图1 实验原理图图1为单回路上水箱液位控制系统,单回路调节系统一般指在一个调节对象上用一个调节器来保持一个参数的恒定,而调节器只接受一个测量信号,其输出也只控制一个执行机构。
本系统所要保持的恒定参数是液位的给定高度,即控制的任务是控制上小水箱液位等于给定值所要求的高度。
根据控制框图,这是一个闭环反馈单回路液位控制,采用工业智能仪表控制。
当调节方案确定后,就要整定调节器的参数,一个单回路系统控制质量的好坏与控制器参数选择有着很大的关系。
合适的控制参数,可以带来满意的控制效果。
反之,控制器参数选择得不合适,则会使控制质量变坏,达不到预期效果。
因此,当一个单回路系统组成好以后,如何整定好控制器参数是一个很重要的实际问题,系统的投运和参数整定是十分重要的工作。
一般言之,用比例(P)调节器的系统是一个有差系统,比例度δ的大小不仅会影响到余差的大小,而且与系统的动态性能也密切相关。
比例积分(PI)调节器,由于积分的作用,不仅能实现系统无余差,而且只要参数δ,Ti调节合理,也能使系统具有良好的动态性能。
比例积分微分(PID)调节器是在PI调节器的基础上再引入微分D的作用,从而使系统既无余差存在,又能改善系统的动态性能(快速性、稳定性等)。
在单位阶跃作用下,P、PI、PID 调节系统的阶跃响应分别如图2中的曲线①、②、③所示。
图2 P、PI和PID调节的阶跃响应曲线四、实验内容和步骤1. 设备的连接和检查1)将AE2000B 实验对象的储水箱灌满水(至最高高度);2)打开以丹麦泵、电动调节阀、涡轮流量计组成的动力支路至上水箱的出水阀,关闭动力支路上通往其他对象的切换阀;3)打开上水箱的出水阀至适当开度;4)检查电源开关是否关闭。
实验九DCS水箱液位控制系统

实验九DCS水箱液位控制系统实验目的1、了解单回路控制的特点和调节品质,掌握PID参数对控制性能的影响。
2、学会分析执行器风开风关特性的选择及调节器正反作用的确定。
3、初步掌握单回路控制系统的投运步骤以及单回路控制器参数调整方法。
实验设备A3000过程对象的下水箱V103,SUPCONDCS,支路系统1,支路系统2。
图9-1A3000过程控制系统示意图实验原理9-2单回路控制系统方框图图9-2为单回路控制系统方框图的一般形式,它是由被控对象、执行器、调节器和测量变送器组成一个单闭环控制系统。
系统的给定量是某一定值,要求系统的被控制量稳定至给定量。
由于这种系统结构简单,性能较好,调试方便等优点,故在工业生产中已被广泛应用。
控制器采用PID控制规律,常用的控制规律有比例(P)调节、比例积分(PI)调节、比例微分(PD)调节、比例积分微分(PID)调节。
调节器参数的整定一般有两种方法:一种是理论计算法,即根据广义对象的数学模型和性能要求,用根轨迹法或频率特性法来确定调节器的相关参数;另一种方法是工程实验法,通过对典型输入响应曲线所得到的特征量,然后查照经验表,求得调节器的相关参数。
工程实验整定法有临界振荡法、衰减振荡法。
(1)临界振荡法将Ti→∞,Td=0,调整δ至较大值,逐渐减小δ,直至出现等幅振荡如下图所示,记下δr(临界比例带),根据δr,Tα查表得δ,Ti,Td,见下表图9-2临界震荡过程表9-1临界比例度法控制器参数计算表临界比例度法的优点是应用简单方便,但此法有一定限制。
首先要产生允许受控变量能承受等幅振荡的波动,其次是受控对象应是二阶和二阶以上或具有纯滞后的一阶以上环节,否则在比例控制下,系统是不会出现等幅振荡的。
在求取等幅振荡曲线时,应特别注意控制阀出现开、关的极端状态。
(2)衰减振荡法将Ti→∞,Td=0,调δ使被控量达4:1或10:1如下图所示;对应δ,根据δ,T确定δ,Ti,Td,见下表图9-44:1衰减震荡曲线表9-2衰减曲线法控制器参数计算表实验流程介绍以第1套实验装置为例,在A3000高级过程控制实验系统中,下图所示为液位单回路控制系统。
单容水箱液位控制系统的设计
单容水箱液位控制系统的设计水箱液位控制系统是指利用传感器等技术手段实时监测水箱液位,并通过控制装置调节供水和排水流量,使水箱的液位保持在设定的范围内的系统。
1.系统组成(1)传感器:负责实时监测水箱液位,常用的传感器有浮球传感器、电阻传感器、超声波传感器等。
传感器要具有高精度、稳定性好、可靠性高等特点。
(2)控制装置:根据传感器反馈的液位信号,控制水泵或排水装置,调节供水和排水流量,使水箱液位保持在设定的范围内。
控制装置可以采用微控制器、PLC等。
(3)供水装置:负责向水箱供水,可以是普通水泵、恒压供水设备等。
供水装置的选型要考虑流量、扬程等参数。
(4)排水装置:负责将多余的水排出水箱,可以是排水泵、电磁阀等。
排水装置的选型要考虑排水能力、响应时间等参数。
(5)控制面板:提供操作和显示功能,用于设定液位控制的参数和实时显示液位情况。
2.系统原理(1)运行原理:系统根据设定的最低液位和最高液位,当液位低于最低液位时,控制装置开启供水装置;当液位高于最高液位时,控制装置开启排水装置。
当液位处于最低液位和最高液位之间时,控制装置停止供水和排水装置。
(2)至空调和给排水系统的作用:当液位低于最低液位时,系统将启动供水装置,为空调系统提供水源;当液位高于最高液位时,系统将启动排水装置,将多余的水排出,保证水箱不溢出。
3.系统设计要点(1)传感器的选择:根据实际情况选择不同类型的传感器。
传感器的安装位置要合理,避免水箱漏水或传感器受到污染。
(2)控制装置的设计:根据传感器反馈的液位信号,计算控制装置的输出信号,控制供水和排水装置的运行。
要考虑控制装置的响应时间、动作准确性等参数。
(3)供水装置和排水装置的选型:选型要根据水箱的容量和液位控制需求确定。
要考虑流量、扬程、动力源等因素。
(4)安全保护措施:系统应具备过液位保护、过流量保护、电源故障保护等功能,确保系统的安全可靠性。
(5)控制面板的设计:控制面板应具有操作简便、参数设定方便、实时显示液位等功能。
实验二 双容水箱液位定值控制系统(单回路)

实验项目名称:(所属课程:)学院:专业班级:姓名:学号:实验日期:实验地点:合作者:指导教师:本实验项目成绩:教师签字:日期:一、实验目的1.通过实验进一步了解双容水箱液位的特性。
2.掌握双容水箱液位控制系统调节器参数的整定与投运方法。
3.研究调节器相关参数的改变对系统动态性能的影响。
4.研究P、PI、PD和PID四种调节器分别对液位系统的控制作用。
5.掌握双容液位定值控制系统采用不同控制方案的实现过程。
二、实验条件THSA-1型过控综合自动化控制系统实验平台。
三、实验原理图2-4 单容液位定值控制系统原理框图四、实验内容与要求本实验选择中水箱液位作为被控参数,上水箱流入量为控制参数。
实验之前先将储水箱中贮足水量,然后将阀门F1-1、F1-2、F1-7和F1-11全开,将中水箱出水阀F1-10开至适当开度(50%左右,上水箱出水阀开到70%左右),其余阀门均关闭。
按以下步骤进行实验。
1.根据系统组成方框图接线,如图2-5所示。
2.接通总电源空气开关和钥匙开关,打开24V开关电源,给压力变送器上电,按下启动按钮,合上单相1、单相对性空气开关,给智能仪表及电动调节阀上电。
3.打开上位机“组态王”组态环境,打开“智能仪表控制系统”工程,然后进入组态王运行环境,在主菜单中点击“实验四、双容液位定值控制系统”,进入实验四的监控界面。
4.在上位机监控界面中点击“启动仪表”,将智能仪表设置为“手动”,并将设定值和输出值设置为一个合适的值,此操作可通过调节仪表实现。
值得注意的是手自动切换的时间为:当中水箱液位基本稳定不变(一般约为3~5cm)且下水箱的液位趋于给定值时切换为最佳。
5.合上三相电源空气开关,磁力驱动泵上电打水,适当增加/减少智能仪表的输出量,使中水箱的液位平衡于设定值。
6.按经验法或动态特性参数法整定调节器参数,选择PI控制规律,并按整定后的PI参数进行调节器参数设置。
图2-5 智能仪表控制单容液位定值控制实验接线图7.待液位稳定于给定值后,将调节器切换到“自动控制状态。
液位单回路控制系统的仿真实验报告

液位单回路控制系统的仿真实验报告一、实验目的:了解和掌握单回路控制系统的组成和工作原理,运用Intouch 工业组态软件实现液位单回路控制系统的仿真。
二、液位单回路控制系统模型:液位单回路控制系统方框图系统中各组成单元的模型如下: 水箱对象模型:120020)(+=s s G 液位传感器:量程0~40cm 输出 0~5V执行阀:控制电压:0~10V 。
对应 0~100%开度。
最大开度时 Q=3.5cm 3/s 四、实验过程(1)液位单回路控制系统界面(2)液位单回路控制系统脚本语言启动时:------------------------------------------------------------------------------------------------------- ek-2=0;初始误差设置为0ek-1=0;start=0;启停按钮的初始时刻设置为停u=0;ts=1;标志位qk-1=1;标志位------------------------------------------------------------------------------------------------------- 运行时:IF start == 1 THENtj1=tj1+0.5;从初始时刻开始计时,方便以后赋值IF hrk <= 0.98*hs OR hrk >= 1.02*hs THEN;设定调节时间tj=tj1;ENDIF;IF hrk > hs THEN;当实际值大于设定值时,标志位设为0ts=0;ENDIF;IF hrk <= hs AND ts==1 THEN;设置上升时间t=tj1;ENDIF;IF hrk < hrk-1 THEN;当实际液位下降时,标志位设为0qk-1=0;ENDIF;IF hrk >= hs AND qk-1==1THEN ;设定超调量ct =( hrk - hs) / hs*100;ENDIF;------------------------------------------------------------------------------------------------------- kc= kp;比例微分积分的系数设定ki= kc *0.5 / Ti;kd=2*kc*Td;ek-2 = ek-1;ek-1=ek;ek = hs / 8-hrk / 8;误差设定uk-1 = u;u=uk-1+kc*(ek - ek-1) +ki* ek + kd* (ek - 2*ek-1 + ek-2);PID增量设定式IF u >= 10 THEN;使实际控制电压在0~10v之间,更符合实际u=10;ENDIFIF u <= 0 THENu=0;ENDIF;qk=3.5 *u/10;由控制电压控制的流量表达式hrk-1=hrk;hrk=(qk+20*hrk-1)*20/401;由传递函数计算出当前时刻液位与上一时刻液位以及流量的关系。
单容水箱液位控制系统设计
单容水箱液位控制系统设计一、引言单容水箱液位控制系统是一种常见的工业自动化控制系统。
它主要用于监测和控制水箱的液位,确保水箱中的液位保持在特定的范围内。
本文将介绍单容水箱液位控制系统的设计原理、硬件电路设计、软件设计以及系统测试和实施。
二、设计原理1.传感器模块传感器模块用于监测水箱中的液位。
一种常用的传感器是浮球传感器,它随着液位的变化而移动,从而输出不同的电信号。
传感器模块将传感器输出的信号转换为数字信号,并传送给控制器模块进行处理。
2.控制器模块控制器模块是整个系统的核心,它接收传感器模块传来的信号,并根据预设的液位范围进行判断和控制。
控制器模块通常使用单片机或者嵌入式系统来实现。
它可以通过开关控制执行器模块的工作状态,以调节水箱的液位。
3.执行器模块执行器模块用于控制水箱的进水和排水。
在液位过低时,执行器模块打开水泵,使水箱进水;在液位过高时,执行器模块关闭水泵,使水箱排水。
执行器模块可以采用继电器、驱动电机等元件来实现。
三、硬件电路设计1.传感器模块传感器模块将传感器的信号转换为数字信号。
可以使用模拟到数字转换器(ADC)将传感器输出的模拟电压转换为数字信号,然后通过串口等方式传送给控制器模块。
2.控制器模块控制器模块可以使用单片机或者嵌入式系统来实现。
它需要包括输入接口、控制逻辑和输出接口。
输入接口负责接收传感器模块传来的信号,控制逻辑通过判断液位范围来控制执行器模块的工作状态,输出接口负责向执行器模块发送控制信号。
3.执行器模块执行器模块根据控制器模块的信号控制水箱的进水和排水。
可以使用继电器或驱动电机等元件来实现。
进水时,可以通过开启水泵或开启电磁阀等方式;排水时,可以通过关闭水泵或关闭电磁阀等方式。
四、软件设计软件设计主要包括控制器模块的程序设计。
程序需要实时监测传感器模块的信号,并根据预设的液位范围进行判断和控制。
可以使用状态机或者PID控制算法来实现。
1.状态机状态机通过定义不同的状态和状态转移条件来实现控制逻辑。
关于西门子S7-200PLC控制的单水箱液位控制系统
关于西门子S7-200PLC控制的单水箱液位控制系统摘要:本文涉及西门子S7-200 PLC控制的单水箱液位控制系统,主要介绍了该系统的硬件组成、软件设计及控制方法。
通过采用传感器测量水箱液位,利用PLC进行数据处理和动作控制,实现了液位的自动控制。
该系统具有良好的控制精度和稳定性,能够满足单水箱液位控制的需求。
关键词:西门子S7-200 PLC,单水箱液位控制,传感器,自动控制正文:一、概述单水箱液位控制系统主要是通过对装置液位的检测、处理、控制实现液位的自动控制。
本文主要介绍基于西门子S7-200PLC 控制的单水箱液位控制系统。
二、系统硬件该系统的硬件由传感器、PLC、继电器、驱动器等组成。
其中:1. 传感器:采用超声波液位传感器,检测水箱液位高度,并将检测到的液位信号传输给PLC。
2. PLC:采用西门子S7-200 PLC,负责对液位信号进行处理,控制继电器进行开关控制。
3. 继电器:用于控制电泵、水泵等设备的开关控制,并将PLC输出的控制信号转化为继电器输出的开关信号。
4. 驱动器:用于控制电动阀门、水泵等设备的启动和停止。
三、系统软件PLC 控制器运行的程序是实现系统控制的关键,本系统采用Ladder Diagram(梯形图)语言进行程序设计。
具体实现步骤如下:1. 液位检测:通过设置输入端口,读取超声波液位传感器检测到的水位高度信号,并将其转化为PLC可以识别的数字信号。
2. 控制逻辑:根据设定的控制目标进行逻辑运算,以控制电泵、水泵等设备的开关控制。
3. 输出控制:根据控制逻辑的结果,设置输出端口,将PLC处理后的控制信号通过继电器输出,实现对水泵等设备的动作控制。
4. 系统监控:设置监控程序,实时监测PLC的运行状态,并对系统的运行状态进行判断,以保证系统的正常运行。
四、系统控制方法根据液位反馈信号,PLC控制程序可以根据设定的控制目标来判断控制条件。
将液位传感器所检测到的水位高度转换为数位信号后,PLC程序可以计算液位高度和液位与设定值之间的偏差,进而控制水泵等设备的开关控制。
实验六 单容下水箱液位调节阀PID 单回路控制

实验六 单容下水箱液位调节阀PID 单回路控制1、实验目的(1)学会操作A3000过程控制实验系统;(2)了解PID控制规律,学习初步整定参数。
2、实验内容及步骤1、单容下水箱液位 PID 控制流程图如下图所示。
单容下水箱液位调节阀PID单回路控制测点清单如下表所示。
水介质由泵P102 从水箱V104 中加压获得压头,经由调节阀FV-101 进入水箱V103,通过手阀QV-116 回流至水箱V104 而形成水循环;其中,水箱V103的液位由LT-103 测得,用调节手阀QV-116 的开启程度来模拟负载的大小。
本例为定值自动调节系统,FV-101 为操纵变量,LT-103 为被控变量,采用PID 调节来完成。
2、在现场系统上,打开手阀QV102、QV105,调节下水箱闸板QV116开度(可以稍微大一些),其余阀门关闭。
3、在控制系统上,将IO面板的下水箱液位输出连接到AI0,IO面板的电动调节阀控制端连到AO0。
注意:具体那个通道连接指定的传感器和执行器依赖于控制器编程。
对于全连好线的系统,例如DCS,则必须安装已经接线的通道来编程。
4、打开设备电源。
启动右边水泵P102和调节阀。
5、启动计算机组态软件,进入测试项目界面。
启动调节器,设置各项参数,可将调节器的手动控制切换到自动控制。
6、设置比例参数。
观察计算机显示屏上的曲线,待被调参数基本稳定于给定值后,可以开始加干扰测试。
3、实验报告(1)设计一个报表:实验开始后,每20分钟记录一组数据,包括调节阀控制、V103液位、SP三个变量。
(2)改变参数设置,记录相应的变量曲线图。
(3)通过曲线图对比,谈谈对PID参数整定的心得。
液位单回路控制系统仿真

液位单回路控制系统的仿真一、目的:了解和掌握单回路控制系统的组成和工作原理,运用Intouch 工业组态软件实现液位单回路控制系统的仿真。
二、要求:控制界面友好,操作步骤清晰,控制算法正确,能够很好地反映液位单回路控制系统的控制过程。
三、液位单回路控制系统介绍: PID 调节器执行阀水箱对象液位传感器设定液位实际液位e u Q -液位单回路控制系统方框图系统中各组成单元的模型如下:水箱对象模型:120020)(+=s s G 液位传感器:量程 0~40cm 输出 0~5V执行阀:控制电压:0~10V 对应 0~100%开度 ,最大开度时 Q=3.5cm 3/s四、仿真步骤:首先应根据水箱对象模型,求出其在时域上的表达式:由G(s)=H(s)/Q(s),可以得到20*Q(s)=(200S+1)*H(s),两边同取拉氏反变换可得h (k ) = 0.0498 * q(k) + 0.997 * h(k-1);其中h(k)为当前液位,q(k)对应执行阀输出。
由于采用增量式PID 算法,PID 调节器的输入e(k)与u(k)有如下关系:[][][][]∑∑∑=-==∆=∆+-=-+--⨯+⨯+--⨯=---⨯++-⨯---⨯++⨯=--=∆k i D I C D k i I C D ki I C i u k u k u k u k e k e k e K k e K k e k e K k e k e K i e K k e K k e k e K i e K k e K k u k u k u 010)()()1()()2()1(2)()()1()()2()1()()1()1()()()()1()()(另由执行阀电压与开度的关系,可得q(k)=0.35*u(k),由此便得到了h(k)与e(k)、e(k-1)、e(k-2)的关系。
先假设设定液位为hs,则其对应的电压值应为hs/8,实际液位hr 对应的电压值为hr/8,有方框图可知e=hs/8-hr/8;这便形成了闭环回路。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
比例微分控制——引入了微分作用,具有超前控制作用,在被控对象具有较大滞后时,会有效的改善控制质量。但对于滞后小干扰作用频繁,含有高频噪声的系统,将可能使系统产生振荡,甚至失控。
微分系数
eko
内存实型
中间变量
ek01
内存实型
中间变量
ek02
内存实型
中间变量
TI
内存实型
积分系数
P
内存实型
Pv
内存实型
SP
内存实型
PID 调节器构成的闭环控制回路一般原理如图1 所示
图1 控制系统方框图
控制系统草稿图如图2
图2
控制规律选择:目前工业上常用的控制规律主要有:比例控制、比例积分控制和比例积分微分控制等。本方案采用比例积分微分控制。
比例控制——克服干扰能力强、控制及时、过渡时间短。是最基本的控制规律。但在终了时会存在余差,负荷变化越大余差越大。使用于滞后较小、负荷变化不大、允许被控变量存在余差的场合。
2.控制台:含接线端子、485总线模块、控制电源。
3.计算机。
4.组态软件。
压力传感器::压力传感器用来对管道压力进行检测,采用工业用的DBYG扩散硅压力传感器,本传感器按标准的二线制传输,稳定性好,可靠性高。可方便与其他DDZ—ⅢX型仪表互换配置,并能直接替换进口同类仪表。工作时需串入24V直流电压,0.5级精度,二线制4-20mA标准信号输出。
主阀开度
VV1
I/O离散
bai
ddo2.value
电磁阀1
VV2
I/O离散
bai
ddo14.value
电磁阀2
VV4
I/O离散
bai
ddo4.value
电磁阀3
Star
内存离散
开始运行
Auto
内存离散
自动运行
a01
内存整型
中间变量
a11
内存整型
中间变量
a21
内存整型
中间变量
Kp
内存实型
比例系数
TD
内存实型
变频器:三菱FR-S520变频器,4-20mA控制信号输入,可对压力进行控制,体积小,外加电流控制,频率可高达200Hz。
水泵:采用丹麦格兰富循环水泵。220V供电。
电动调节阀采用德国PS公司进口PSL201型智能电动调节阀。
牛顿7000系列模块:D/A7024模块4路模拟输出,电流(4-20mA)电压(1-5V)信号均可,A/D7017模块8路模拟电压输入,485/232转换7520模块,转换速度极高(300~115KHz),232口可长距离传输。
水箱液位单回路控制系统
一、控制目的
根据设定的控制对象和管道配置,运用计算机和INTOUCH组态软件,设计一套监控系统,并通过调试使得水箱液位维持恒定或保持在一定的误差范给定。
2、无扰动时,水压基本恒定,由变频器控制水泵实现。
3、扰动因数:水箱出水流量允许波动。
8.能够通过OPCLINK完成INTOUCH组态软件和Kingview组态软件的实际连接。
9.能够手动投运系统,实现手动功能。如有问题,能够修正设计。
10.能够自动投运系统,实现自动控制功能。如有问题,能够修正设计。
11.运行结果必须实现控制目的。
五、仪表及模块 :
1.装置柜:含被控对象―水箱、管道(直径4”)、仪表、供水设备、开关电磁阀和电动调节阀等。
七、标记名字典
变量名称
标记类型
访问名
项目名
注释
flow_mian
I/O实型
bai
rliuliang1.value
主流量
liquid_up
I/O实型
bai
ryewei1.value
上水箱液位
liquid_down
I/O实型
bai
ryewei2.value
下水箱液位
Uk0
I/O实型
bai
ruk0.value
控制系统设计时针对某一特定生产对象进行的 ,当系统安装完成之后,控制效果主要取决于控制器的参数设定整定。选择合适的比例度、积分时间、微分时间是保证和提高系统控制质量的主要途径。
单回路水箱的原理,系统地输入变量为进水阀门、出水阀门的开度,输出变量为水箱液位。单回路PID控制的被控制量是水位,控制量是进水门、出水门开度。通过调节PID控制器的比例增益、积分时间、微分时间三个参数得到比较好的控制效果。
D/A模块:nudan7024
模块外形
模块原理
模块接线
模块性能:电流输出4-20Ma;
A/D模块:nudan7017—电压输入
DO模块:nudan7043
通信模块:nudan7530
六、工艺流程图和系统组态图
手动 自动
图3工艺流程图4系统组态
系统可以手动/自动控制,通过控制电池阀开度改变水的流量,使水位达到预定数值。
比例积分微分控制——综合了比例、积分、微分控制规律的优点。适用于容量滞后较大、负荷变化大、控制要求高的场合。
该方案的控制目标是使水位达到平衡状态,通过控制电动调节阀改变阀门开度,来控制流量的大小,从而来控制水位。选择阀门开度为控制量,水位为被控量。控制规律选择PID控制规律。
四、测要求试:
1.使用INTOUCH组态软件。
5.要求系统具备如下手动控制功能:控制电磁阀开通和关闭、通过直接给定控制电动调节阀开度。
6.要求系统具备如下自动控制功能:控制电磁阀开通和关闭、通过闭环PID运算结果控制电动调节阀开度,允许在线实时调整PID参数和水位给定值。
7.能够正确识别有关仪表和智能模块,按照I/O设定完成控制台上所用I/O接线。
4、预期性能:响应曲线为衰减震荡;允许存在一定误差。调整时间尽可能短。
三、方案设计、控制规律选择
简单控制系统一般是单回路控制系统。由于其结构简单并且能够满足大多数控制质量的要求,因此在生产过程控制中得到了广泛的应用,是生产过程控制中最基本的一种控制系统。一个单回路反馈系统是由测量变送器装置、控制器、和被控对象所组成,按其被控变量类型的不同可以分为温度控制系统、压力控制系统、流量控制系统、液位控制系统等。
2.采用计算机控制方式和PID控制规律。
3.设计出比较完整的控制画面。画面包括被控水箱、储水箱、电动调节阀、管道及其开关型电磁阀、流量检测仪表及显示、压力检测仪表及显示、阀位检测及显示、水位检测仪表及显示、实时曲线、历史曲线、PID参数调整框、手动控制开关、自动控制开关、结束退出开关。
4.设计出采用PID控制规律的脚本程序。