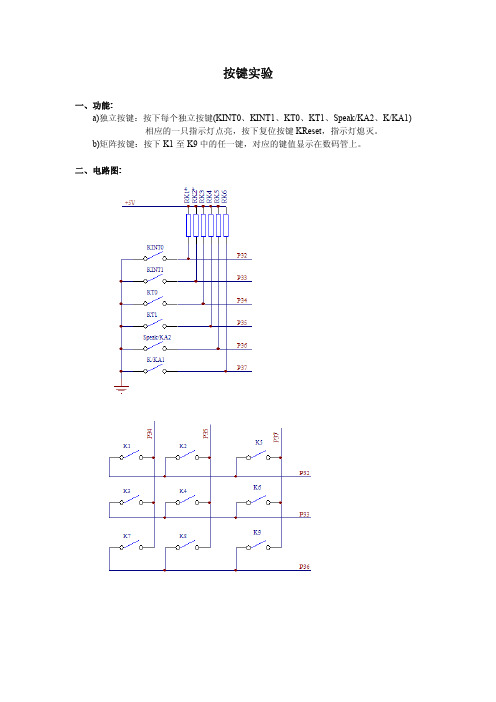
51汇编按键数码管程序
51单片机矩形键盘控制数码管显示0-F,以及LED灯的亮灭

51单片机矩形键盘控制数码管显示0-F,以及LED灯的亮灭仿真视频51单片机矩形键盘控制数码管显示0-F,以及LED灯的亮灭的仿真视频电路图总图部分图1部分图2部分图3元件清单(有多余)C语言程序#include <reg51.h>#define uint unsigned int #define uchar unsigned char//共阳数码管编码表&LED灯uchar code table[] ={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0x88,0x83, 0xc6,0xa1,0x86,0x8e};//函数声明void delay(uint time); //延时函数void display(uchar k); //数码管显示0-F以及LED灯的亮灭uchar getKey();//读取键盘的数值//主程序void main(){ uchar keyValue; while(1){ keyValue = getKey(); //读取键盘值 display(keyValue); //数码管显示&LED亮灭}}void delay(uint time){ uint i,j; for(i = 0; i<time; ++i) for(j = 0; j<110; ++j);}void display(uchar k){ P0 = table[k]; P1 = table[k];}uchar getKey(){ uchar x , y ; uchar result; // 计算行数X的值 P2 = 0x0f; // 从P2口输出,写P2口 if (P2 != 0x0f)// 从P2口输入,P2口 { // 读出的不是0x0f说明有按键被按下 delay(20); // 判断在哪一行 switch (P2) { case 0x0e: x = 0; break; case 0x0d: x = 1; break; case 0x0b: x = 2; break; case 0x07: x = 3; break; default: break; } delay(10); // 计算列数y的值P2 = 0xf0; if (P2 != 0xf0) { delay(20); switch (P2) { case 0xe0:y = 0; break; case 0xd0: y = 1; break; case 0xb0: y = 2; break; case 0x70: y = 3; break; default: break; } // 计算出结果,确定数码管显示的数字以及字母与LED的亮灭 } } result = x * 4 + y; return result;}#单片机##C语言##电工电子#。
我的51单片机之 按键 的 C语言与汇编的编程
P1=0xFF; P3=0xFF; while(1) {
if(KINT0==0) {
LD1=0; } if(KINT1==0) {
LD2=0; } if(KT0==0) {
LD3=0; } if(KT1==0) {
LD4=0; } if(KA2==0) {
LD5=0;
} if(KA1==0) {
KINT0 EQU P3.2; KINT1 EQU P3.3; KT0 EQU P3.4; KT1 EQU P3.5; KA2 EQU P3.6; KA1 EQU P3.7; LD1 EQU P1.0; LD2 EQU P1.1; LD3 EQU P1.2; LD4 EQU P1.3; LD5 EQU P1.4; LD6 EQU P1.5;
LD6=0; } } }
四、独立按键汇编程序: ;**************************************************************** ;每个独立铵键用一只指示灯指示;按复位键可熄灭,made by luqichao ;**************************************************************** ORG 0000H AJMP MAIN ORG 0030H
//字形码:0--f 及小数点
unsigned char code AscLed[10]={0xC0,0xF9,0xA4,0xB0,0x99,0x92,0x82,0xF8,0x80,0x90};
//
{ 0 , 1, 2 , 3 , 4 , 5, 6, 7, 8, 9 }
void main() {
start: LED2=0; //亮数码管 P3=0xFF; KH1=0; if(KL1==0){LEDCODE=AscLed[1];goto start;};//k1 if(KL2==0){LEDCODE=AscLed[2];goto start;};//k2 if(KL3==0){LEDCODE=AscLed[5];goto start;};//k5 KH2=0; if(KL1==0){LEDCODE=AscLed[3];goto start;};//k3 if(KL2==0){LEDCODE=AscLed[4];goto start;};//k4 if(KL3==0){LEDCODE=AscLed[6];goto start;};//k6 KH3=0; if(KL1==0){LEDCODE=AscLed[7];goto start;};//k7 if(KL2==0){LEDCODE=AscLed[8];goto start;};//k8 if(KL3==0){LEDCODE=AscLed[9];goto start;};//k9
51单片机4×4矩阵键盘且在数码管最后一位显示汇编语言

51下面是51单片机使用4×4矩阵键盘的汇编程序,并在数码管的最后一位显示一个字符:```ORG 0 ;程序从地址0开始MOV P1,#0FFH ;P1口设置为输入口MOV P0,#0FH ;P0口设置为输出口LOOP:MOV A,P1 ;读取P1口的值CJNE A,#0FFH,KEY_PRESSED ;判断是否有按键按下SJMP LOOP ;如果没有按键按下,继续循环KEY_PRESSED:MOV R0,A ;保存按键的值CLR P0.0 ;选定行0MOV A,P1ANL A,#0F0H ;按位与运算,保留列位的值CJNE A,#0F0H,COL0 ;判断是否有按键按下在第0列MOV A,#'0' ;如果在第0列按下按键,则A的值为0JMP DISP ;跳转到显示程序COL0:CLR P0.1 ;选定行1MOV A,P1ANL A,#0F0HCJNE A,#0E0H,COL1 ;判断是否有按键按下在第1列MOV A,#'1' ;如果在第1列按下按键,则A的值为1JMP DISP ;跳转到显示程序COL1:CLR P0.2 ;选定行2MOV A,P1ANL A,#0F0HCJNE A,#0D0H,COL2 ;判断是否有按键按下在第2列MOV A,#'2' ;如果在第2列按下按键,则A的值为2JMP DISP ;跳转到显示程序COL2:CLR P0.3 ;选定行3MOV A,P1ANL A,#0F0HCJNE A,#0B0H,COL3 ;判断是否有按键按下在第3列MOV A,#'3' ;如果在第3列按下按键,则A的值为3JMP DISP ;跳转到显示程序COL3:CLR P0.4 ;选定行4MOV A,P1ANL A,#0F0H4MOV A,#'4' ;如果在第4列按下按键,则A的值为4 JMP DISP ;跳转到显示程序COL4:CLR P0.5 ;选定行5MOV A,P1ANL A,#0F0HCJNE A,#0B0H,COL5 ;判断是否有按键按下在第5列 MOV A,#'5' ;如果在第5列按下按键,则A的值为5 JMP DISP ;跳转到显示程序COL5:CLR P0.6 ;选定行6MOV A,P1ANL A,#0F0HCJNE A,#0D0H,COL6 ;判断是否有按键按下在第6列 MOV A,#'6' ;如果在第6列按下按键,则A的值为6 JMP DISP ;跳转到显示程序COL6:CLR P0.7 ;选定行7MOV A,P1ANL A,#0F0HCJNE A,#0E0H,COL7 ;判断是否有按键按下在第7列 MOV A,#'7' ;如果在第7列按下按键,则A的值为7 JMP DISP ;跳转到显示程序COL7:MOV A,#00HJMP EXIT ;如果没有按下任何键,退出程序DISP: ;数码管显示程序MOV R1,#100B ;延时计数器初始化MOV P2,A ;把按键值存入P2口MOV A,#07HANL A,P0 ;从P0口读取选定的行值MOV P0,A ;根据选定的行值输出相应的值ACALL DELAY ;调用延时程序MOV P0,#0FH ;关闭所有行DJNZ R1,$ ;当延时计数器不为0时,继续延时MOV A,#0FHMOV P0,A ;清除所有显示JMP LOOP ;跳转回主程序EXIT:MOV P2.7,1 ;在数码管的最后一位显示字符1SJMP EXIT ;无限循环DELAY: ;延时程序MOV R2,#75DMOV R3,#200D DELAY3:DJNZ R3,$DJNZ R2,DELAY2 RET```。
51单片机数码管循环显示0~9程序说明
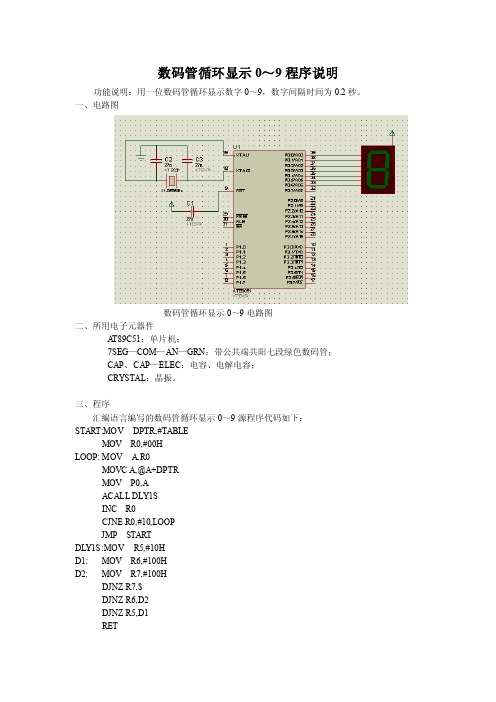
数码管循环显示0~9程序说明功能说明:用一位数码管循环显示数字0~9,数字间隔时间为0.2秒。
一、电路图数码管循环显示0~9电路图二、所用电子元器件A T89C51:单片机;7SEG—COM—AN—GRN:带公共端共阳七段绿色数码管;CAP、CAP—ELEC:电容、电解电容;CRYSTAL:晶振。
三、程序汇编语言编写的数码管循环显示0~9源程序代码如下:START:MOV DPTR,#TABLEMOV R0,#00HLOOP: MOV A,R0MOVC A,@A+DPTRMOV P0,AACALL DLY1SINC R0CJNE R0,#10,LOOPJMP STARTDLY1S:MOV R5,#10HD1: MOV R6,#100HD2: MOV R7,#100HDJNZ R7,$DJNZ R6,D2DJNZ R5,D1RETTABLE:DB 0C0H,0F9H,0A4H,0B0HDB 99H, 92H, 82H, 0F8HDB 80H, 90H, 88H, 83HDB 0C6H,0A1H,86H, 8EHENDProtetus 安装说明使用说明1.先安装Setup71.exe,提示选择Setup Type时默认选择即可;若提示No LICENCE 选择安装文件中"crack"-->MAXIM_LICENCE.lxk,打开安装。
2.安装完成后将crack-->文件夹BIN 和文件夹MODELS 下的文件复制到安装目录相应的文件夹内覆盖。
3.安装proteus.7.x-patch,选择patch,提示can not find the file. search the file,选择yes即可;然后选择bin文件中的ares.exe ;在选择models 中的avr.dll安装完毕退出即可。
注:***"Keil驱动"中的程序为Proteus与Keil联调的驱动。
基于51单片机按键 长按短按效果 源程序
基于51单片机按键长按短按效果源程序[复制链接] *实验名称:多位数按键加减**晶振:12MHZ*内容:按键加减数字,多个数码管显示,使用定时器做数码管动态扫描**并区别长按短按效果,完全可以应用的实际生产中** ---------------------------------------------------------------*/#include<reg52.h> //包含头文件,一般情况不需要改动,//头文件包含特殊功能寄存器的定义sbit KEY_ADD=P3^3; //定义按键输入端口S17sbit KEY_DEC=P3^2; //S18#define DataPort P1 //定义数据端口程序中遇到DataPort则用P1替换sbit LATCH1=P2^0;//定义锁存使能端口段锁存sbit LATCH2=P2^1;//位锁存sbit P35 = P3^5;//这是为了关闭开发板上的点阵实际应用去掉unsigned char code HEYAO_DuanMa[10]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90};//显示段码值89unsigned char code HEYAO_WeiMa[]={0x1,0x2,0x4,0x8,0x10,0x20,0x40,0x80};//分别对应相应的数码管点亮,即位码unsigned char TempData[8]={0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF};//存储显示值的全局变量void DelayUs2x(unsigned char t);//函数声明void DelayMs(unsigned char t);void Init_Timer0(void);void Display(unsigned char FirstBit,unsigned char Num);/*------------------------------------------------主函数------------------------------------------------*/void main (void){unsigned char num=0,key_press_num;P35=0; //这是为了关闭开发板上的点阵实际应用去掉KEY_ADD=1; //按键输入端口电平置高KEY_DEC=1;Init_Timer0();while(1) //主循环{if(!KEY_ADD) //如果检测到低电平,说明按键按下{DelayMs(10); //延时去抖,一般10-20msif(!KEY_ADD) //再次确认按键是否按下,没有按下则退出{while(!KEY_ADD){key_press_num++;DelayMs(10); //10x200=2000ms=2sif(key_press_num==200) //大约2s{key_press_num=0; //如果达到长按键标准//则进入长按键动作while(!KEY_ADD) //这里用于识别是否按//键还在按下,如果按//下执行相关动作,否则退出{if(num<99) //加操作num++;//即时把显示数据处理,如果去掉下面2//句处理信息,实际上看不到渐变效果,//而是看到跳变效果//用户可以自行屏蔽测试//分解显示信息,如要显示68,则=6 68%10=8TempData[0]=HEYAO_DuanMa[num/10];TempData[1]=HEYAO_DuanMa[num%10];DelayMs(50);//用于调节长按循环操作//的速度,可以自行调整此值以便达到最佳效果}}}key_press_num=0;//防止累加造成错误识别if(num<99) //加操作num++;}}if(!KEY_DEC) //如果检测到低电平,说明按键按下{DelayMs(10); //延时去抖,一般10-20msif(!KEY_DEC) //再次确认按键是否按下,没有//按下则退出{while(!KEY_DEC){key_press_num++;DelayMs(10);if(key_press_num==200) //大约2s{key_press_num=0;while(!KEY_DEC){if(num>0) //减操作num--;//分解显示信息,如要显示68,则=6 68%10=8TempData[0]=HEYAO_DuanMa[num/10];TempData[1]=HEYAO_DuanMa[num%10];DelayMs(50);//用于调节长按循环操作的速度}}}key_press_num=0;//防止累加造成错误识别if(num>0) //减操作num--;}}//分解显示信息,如要显示68,则=6 68%10=8TempData[0]=HEYAO_DuanMa[num/10];TempData[1]=HEYAO_DuanMa[num%10];// Display(0,8); //显示全部8位//主循环中添加其他需要一直工作的程序}}/*------------------------------------------------uS延时函数,含有输入参数unsigned char t,无返回值unsigned char是定义无符号字符变量,其值的范围是0~255这里使用晶振12M,精确延时请使用汇编,大致延时xx如下T=tx2+5 uS------------------------------------------------*/void DelayUs2x(unsigned char t){while(--t);}/*------------------------------------------------mS延时函数,含有输入参数unsigned char t,无返回值unsigned char是定义无符号字符变量,其值的范围是0~255这里使用晶振12M,精确延时请使用汇编------------------------------------------------*/void DelayMs(unsigned char t){while(t--){//大致延时1mSDelayUs2x(245);DelayUs2x(245);}}显示函数,用于动态扫描数码管输入参数FirstBit表示需要显示的第一位,如赋值2表示从第三个数码管开始显示如输入0表示从第一个显示。
用51单片机8255138373等实现数码管显示按键数值的程序DOC
姓名专业学号2013年10月28日随着单片机技术的飞速发展,在其推动下,现代的电子产品几乎渗透到了社会的各个领域,有力地推动了社会生产力的发展和社会信息化程度的提高,同时也使现代电子产品性能进一步提高。
单片机具有体积小、功能强、应用面广等优点,目前正以前所未见的速度取代着传统电子线路构成的经典系统,蚕食着传统数字电路与模拟电路固有的领地。
它的体积小、质量轻、价格便宜、为学习、应用和开发提供了便利条件。
同时,学习使用单片机了解计算机原理与结构的最佳选择。
现在,这种单片机的使用领域已十分广泛。
彩电、冰箱、空调、录像机、VCD、遥控器、游戏机、电饭煲等无处不见单片机的影子,单片机早已深深地融入我们每个人的生活之中。
单片机能大大地提高这些产品的智能性,易用性及节能性等主要性能指标,给我们的生活带来舒适和方便的同时,在工农业生产上也极大地提高了生产效率和产品质量。
单片机按用途大体上可分为两类,一种是通用型单片机,另一种是专用型单片机。
课题要求:用51单片机、8255、138、373等实现数码管显示按键数值的程序各芯片资料:1.8255芯片资料如下用8255A可编程器件扩展并行接口8255: 有三个八位的并行口:PA、PB、PC。
有三种工作方式:方式0,方式1,方式2。
逻辑结构图:包含四个部分:●三个并行数据输入输出端口●两个工作方式控制电路●一个读写逻辑控制电路●八位总线缓冲器⑴.三个并行数据输入输出端口:A口;B口;C口一般,A口,B口作为数据输入输出端口,C口作为控制/状态信息口,可以分为两个部分,分别与A口和B口配合使用,作为控制信息输出或状态信息输入。
⑵.工作方式控制电路工作方式控制电路有两个:A组控制和B组控制电路,A组控制用来控制A口和C口的上半部分PC7——PC4;B组控制用来控制B口和C口的下半部分PC3——PC0;两组控制电路具有一个控制命令寄存器,用来接收来自CPU的数据(控制字),以决定芯片的工作方式,或对C口按位进行清“0”或者置“1”。
51单片机控制数码管

{
for(j=0;j<len;j++)//循环向后查表
{
while(times<30)
{
times++;
for(i=0;i<8;i++)
{
P0=duan[i+j+k];
latchduan=1;
latchduan=0;
P0=wei[i];
latchwei=1;
latchwei=0;
delay(4);
51单片机控制数码管控制数码管控制51单片机控制数码管数码管单片机控制51数码管数码管字体共阴数码管
硬件电路为两个8位锁存器驱动8个数码管
P0为数据输出
P2.2和P2.3为锁存控制
程序实现123456789abcdef从右到左字幕般显示。两次显示之间间隔两个数码管。第一次显示要求8个数码管依次点亮,无数据的应熄灭
}
}
times=0;
}
k=6; //跳跃过前面六个空
len=18;
}
}
*/
void delay(int x)
{
int i;
while(x--)
for(i=0;i<50;i++);
}
void display(unsigned char FirstBit,unsigned char Num)
{
unsigned char i;
for(i=0;i<Num;i++)
{
P0=0; //清空数据,防止有交替重影
//循环赋值法
unsigned char duan[18]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,0x77,0x7C,0x39,0x5E,0x79,0x71,0x00,0x00};
基于51单片机按键长按短按效果源程序
基于51单片机按键长按短按效果源程序[复制链接]* 实验名称:多位数按键加减** 晶振:12MHZ* 内容:按键加减数字,多个数码管显示,使用定时器做数码管动态扫描** 并区别长按短按效果,完全可以应用的实际生产中** ---------------------------------------------------------------*/#include<reg52.h> //包含头文件,一般情况不需要改动,//头文件包含特殊功能寄存器的定义sbit KEY_ADD=P3^3; //定义按键输入端口S17sbit KEY_DEC=P3^2; //S18#define DataPort P1 //定义数据端口程序中遇到DataPort 则用P1 替换sbit LATCH1=P2^0;//定义锁存使能端口段锁存sbit LATCH2=P2^1;// 位锁存sbit P35 = P3^5;//这是为了关闭开发板上的点阵实际应用去掉unsigned char code HEYAO_DuanMa[10]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90};// 显示段码值0123456789unsigned char code HEYAO_WeiMa[]={0x1,0x2,0x4,0x8,0x10,0x20,0x40,0x80};//分别对应相应的数码管点亮,即位码unsigned char TempData[8]={0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF,0XFF};//存储显示值的全局变量void DelayUs2x(unsigned char t);//函数声明void DelayMs(unsigned char t);void Init_Timer0(void);void Display(unsigned char FirstBit,unsigned char Num);/*------------------------------------------------主函数------------------------------------------------*/void main (void){unsigned char num=0,key_press_num;P35=0; //这是为了关闭开发板上的点阵实际应用去掉KEY_ADD=1; //按键输入端口电平置高KEY_DEC=1;Init_Timer0();while (1) //主循环{if(!KEY_ADD) //如果检测到低电平,说明按键按下DelayMs(10); //延时去抖,一般10-20msif(!KEY_ADD) //再次确认按键是否按下,没有按下则退出{while(!KEY_ADD){key_press_num++;DelayMs(10); //10x200=2000ms=2sif(key_press_num==200) //大约2s{key_press_num=0; //如果达到长按键标准//则进入长按键动作while(!KEY_ADD) //这里用于识别是否按//键还在按下,如果按//下执行相关动作,否则退出{if(num<99) //加操作num++;//即时把显示数据处理,如果去掉下面2//句处理信息,实际上看不到渐变效果,//而是看到跳变效果//用户可以自行屏蔽测试//分解显示信息,如要显示68,则68/10=6 68%10=8 TempData[0]=HEYAO_DuanMa[num/10];TempData[1]=HEYAO_DuanMa[num%10];DelayMs(50);//用于调节长按循环操作//的速度,可以自行调整此值以便达到最佳效果}}}key_press_num=0;//防止累加造成错误识别if(num<99) //加操作num++;}}if(!KEY_DEC) //如果检测到低电平,说明按键按下{DelayMs(10); //延时去抖,一般10-20msif(!KEY_DEC) //再次确认按键是否按下,没有//按下则退出{while(!KEY_DEC)key_press_num++;DelayMs(10);if(key_press_num==200) //大约2s{key_press_num=0;while(!KEY_DEC){if(num>0) //减操作num--;//分解显示信息,如要显示68,则68/10=6 68%10=8 TempData[0]=HEYAO_DuanMa[num/10];TempData[1]=HEYAO_DuanMa[num%10];DelayMs(50);//用于调节长按循环操作的速度}}}key_press_num=0;//防止累加造成错误识别if(num>0) //减操作num--;}}//分解显示信息,如要显示68,则68/10=6 68%10=8 TempData[0]=HEYAO_DuanMa[num/10];TempData[1]=HEYAO_DuanMa[num%10];// Display(0,8); //显示全部8位//主循环中添加其他需要一直工作的程序}}/*------------------------------------------------uS延时函数,含有输入参数unsigned char t,无返回值unsigned char 是定义无符号字符变量,其值的范围是0~255 这里使用晶振12M,精确延时请使用汇编,大致延时长度如下T=tx2+5 uS------------------------------------------------*/void DelayUs2x(unsigned char t){while(--t);}/*------------------------------------------------mS延时函数,含有输入参数unsigned char t,无返回值unsigned char 是定义无符号字符变量,其值的范围是0~255 这里使用晶振12M,精确延时请使用汇编------------------------------------------------*/void DelayMs(unsigned char t){while(t--){//大致延时1mSDelayUs2x(245);DelayUs2x(245);}}/*------------------------------------------------显示函数,用于动态扫描数码管输入参数FirstBit 表示需要显示的第一位,如赋值2表示从第三个数码管开始显示如输入0表示从第一个显示。
51单片机静态数码管显示数字程序
void Delay10ms(); //延时 10ms
/******************************************************************************
* *函无
*输 出
:无
*******************************************************************************
/
void main(void)
{
unsigned int i,j;
LSA=0;
LSB=0;
LSC=0;
while(1)
{
if(K1==0)
//检测按键 K1 是否按下
{ Delay10ms(); //消除抖动
if(K1==0)
{
j=0;
}
while((i<50)&&(K1==0)) //检测按键是否松开
{
Delay10ms();
i++;
}
i=0;
} if(K2==0)
//检测按键 K2 是否按下
{
Delay10ms();
if(K2==0)
{
j=9;
}
while((i<50)&&(K2==0))
{
Delay10ms();
i++;
}
i=0;
} if(K3==0)
//检测按键 K3 是否按下
{
Delay10ms();
sbit LSA=P2^2; sbit LSB=P2^3; sbit LSC=P2^4;
sbit K1=P3^1; sbit K2=P3^0; sbit K3=P3^2; sbit K4=P3^3;
51单片机键盘数码管显示(带程序)
期中大作业学院:物理与电子信息工程学院课题:【利用8255和51单片机实现数码管显示按键数值的程序】要求:【4*4矩阵键盘,按0到15,数码管上分别显示0~9,A~F】芯片资料:8255:8255是Intel公司生产的可编程并行I/O接口芯片,有3个8位并行I/O口。
具有3个通道3种工作方式的可编程并行接口芯片(40引脚)。
其各口功能可由软件选择,使用灵活,通用性强。
8255可作为单片机与多种外设连接时的中间接口电路。
8255作为主机与外设的连接芯片,必须提供与主机相连的3个总线接口,即数据线、地址线、控制线接口。
同时必须具有与外设连接的接口A、B、C口。
由于8255可编程,所以必须具有逻辑控制部分,因而8255内部结构分为3个部分:与CPU连接部分、与外设连接部分、控制部分。
8255特性:1.一个并行输入/输出的LSI芯片,多功能的I/O器件,可作为CPU总线与外围的接口。
2.具有24个可编程设置的I/O口,即3组8位的I/O口,分别为PA口、PB口和PC 口。
它们又可分为两组12位的I/O口:A组包括A口及C口(高4位,PC4~PC7),B组包括B口及C口(低4位,PC0~PC3)。
A组可设置为基本的I/O口,闪控(STROBE)的I/O闪控式,双向I/O三种模式;B组只能设置为基本I/O或闪控式I/O两种模式,而这些操作模式完全由控制寄存器的控制字决定.引脚说明RESET:复位输入线,当该输入端处于高电平时,所有内部寄存器(包括控制寄存器)均被清除,所有I/O口均被置成输入方式。
CS:芯片选择信号线,当这个输入引脚为低电平时,即CS=0时,表示芯片被选中,允许8255与CPU进行通讯;CS=1时,8255无法与CPU做数据传输。
RD:读信号线,当这个输入引脚为低电平时,即CS=0且RD=0时,允许8255通过数据总线向CPU发送数据或状态信息,即CPU从8255读取信息或数据。
WR:写入信号,当这个输入引脚为低电平时,即CS=0且WR=0时,允许CPU将数据或控制字写入8255。
51单片机常见汇编程序实验代码

51单片机常见汇编程序实验代码1. 将片外8000H-80FFH单元写入数据AB 32. 将片内RAM20H单元中数据在数码管上显示出来 (3)3. 将片内ARM30H-40H单元清零 54. 将六位数显示在数码管上 55. 8255并口芯片的应用:交通灯控制系统的设计 (6)6. 将交通灯点亮 (7)7. AD转换实验 (8)8. DA转换实验 (10)9. 定时器的应用 ·· 1110. 开关控制LED的亮灭及速度 1211. 计数器实验 (12)12. 串并转换实验 · 1413. 直流电机速度检测1514. 8255PB外接8个开关,编程将开关状态显示在数码管上(串并转换动态扫描方式)17 15. P3.4接开关K,编程将开关拨动次数,通过串并转换的方式进行显示1816. 比较片内RAM30H、31H两个单元值的大小,将较大的数显示在数码管上1917. 单片机P1口接8个开关,编程将开关状态显示在数码管上(串并转换动态扫描方式) (21)18. 将片内50H单元的值显示在数码管上2219. 开关K1接P1.0,K2接P1.1,编程实现当按下K1时在数码管上显示50H单元的值,按下K2在数码管上显示51H单元的值231. 将片外8000H-80FFH单元写入数据ABORG 0000H ;程序从0000H开始执行AJMP MAIN ;跳转到主程序ORG 0030H ;以免覆盖中断MAIN: MOV SP,#60H; 避免堆栈和工作寄存器区冲突MOV DPTR,#8000HMOV R0,#0LOOP: MOV A,#0ABHMOVX @DPTR,AINC DPTRINC R0CJNE R0,#0,LOOP ; 判断AJMP $; 等待END ;调试-视图-M存储器(输入X:8000H)2. 将片内RAM20H单元中数据在数码管上显示出来ORG 0000H ;程序从0000H开始执行AJMP MAIN ;跳转到主程序ORG 0030H ;以免覆盖中断MAIN: MOV SP,#60H ;避免堆栈和工作寄存器区冲突MOV DPTR,#0E100H ;指向命令口MOV A,#03H ;PA、PB口输出MOVX @DPTR,A ;所有并口显示程序先进行8155初始化MOV 20H,#34HMOV A,20HACALL CHAILOOP: MOV R0,#10H ;第一个显示数的送R0MOV R1,#2 ;显示2个数MOV R2,#1 ;从倒数第一个数码管开始显示ACALL DISPLAYLJMP LOOP ;判断CHAI: MOV B,#10HDIV ABMOV 10H,BMOV 11H,ARETDISPLAY: MOV A,@R0MOV 0FH,#8ACALL P164ACALL PBITACALL DELAYMOV A,#0MOVX @DPTR,AINC R0DJNZ R1,DISPLAYRETP164: MOV DPTR,#TABMOVC A,@A+DPTRP164_1: RRC AMOV R3,AMOV ACC.0,CANL A,#0FDHMOV DPTR,#0E102HMOVX @DPTR,AORL A,#0FEHMOVX @DPTR,AMOV A,R3DJNZ 0FH,P164_1MOV 0FH,#8RETPBIT: MOV DPTR,#0E101HMOV A,R2MOVX @DPTR,ARL AMOV R2,ARETDELAY: MOV R6,#4DEL: MOV R7,#250DJNZ R7,$DJNZ R6,DELRETTAB: DB 0FCH,60H,0DAH,0F2H,66H,0B6H,0BEH,0E0H DB 0FEH,0F6H,0EEH,3EH,9CH,7AH,9EH,8EHEND3. 将片内ARM30H-40H单元清零ORG 0000H ;程序从0000H开始执行AJMP MAIN ;跳转到主程序ORG 0030H ;以免覆盖中断MAIN: MOV SP,#60H ;避免堆栈和工作寄存器区冲突MOV R0,#30HMOV A,#0LOOP: MOV @R0,AINC R0CJNE R0,#41H,LOOP ;判断AJMP $ ;等待END ;D:30H4. 将六位数显示在数码管上ORG 0000H ;程序从0000H开始执行AJMP MAIN ;跳转到主程序ORG 0030H ;以免覆盖中断MAIN: MOV SP,#60H ;避免堆栈和工作寄存器区冲突MOV DPTR,#0E100H ;指向命令口MOV A,#03H ;PA、PB口输出MOVX @DPTR,A ;所有并口显示程序先进行8155初始化LOOP: MOV R0,#10H ;第一个显示数的送R0MOV 10H,#0HMOV 11H,#3HMOV 12H,#1HMOV 13H,#2HMOV 14H,#1HMOV 15H,#1HMOV R1,#6 ;显示6个数MOV R2,#1 ;从倒数第一个数码管开始显示ACALL DISPLAYLJMP LOOPDISPLAY: MOV A,@R0MOV 0FH,#8ACALL P164ACALL PBITACALL DELAYMOV A,#0MOVX @DPTR,AINC R0DJNZ R1,DISPLAYRETP164: MOV DPTR,#TABMOVC A,@A+DPTRP164_1: RRC AMOV R3,AMOV ACC.0,CANL A,#0FDHMOV DPTR,#0E102HMOVX @DPTR,AORL A,#0FEHMOVX @DPTR,AMOV A,R3DJNZ 0FH,P164_1MOV 0FH,#8RETPBIT: MOV DPTR,#0E101HMOV A,R2MOVX @DPTR,ARL AMOV R2,ARETDELAY: MOV R6,#4DEL: MOV R7,#250DJNZ R7,$DJNZ R6,DELRETTAB: DB 0FCH,60H,0DAH,0F2H,66H,0B6H,0BEH,0E0HDB 0FEH,0F6H,0EEH,3EH,9CH,7AH,9EH,8EHEND5. 8255并口芯片的应用:交通灯控制系统的设计ORG 0000HAJMP STARTORG 0030HSTART: MOV DPTR,#0AC03HMOV A,#80HMOVX @DPTR,A //8155初始化(所有并口显示中都要先8155初始化)MOV R5,#0F0HACALL DENGMOV R1,#20ACALL DELAYMOV R0,#1LOOP01: MOV R5,#5AHACALL DENGMOV R1,#100ACALL DELAYDJNZ R0,LOOP01MOV R0,#3 // LED_2闪烁次数LOOP02: MOV R5, #0FAHACALL DENGMOV R1,#10ACALL DELAYMOV R5,#50HACALL DENGMOV R1,#10ACALL DELAYDJNZ R0,LOOP02MOV R5,#0A5HACALL DENGMOV R1,#100ACALL DELAYMOV R0,#3LOOP03: MOV R5, #0F5HACALL DENGMOV R1,#10ACALL DELAYMOV R5,#0A0HACALL DENGMOV R1,#10ACALL DELAYDJNZ R0,LOOP03AJMP LOOP01DENG: MOV DPTR,#0AC00H //8155 PA口输出MOV A,R5MOVX @DPTR,A //8155 PA口送出显示参数RET //100ms延时子程序DELAY: MOV R7,#200DEL: MOV R6,#229DJNZ R6,$DJNZ R7,DELDJNZ R1,DELAYRETEND6. 将交通灯点亮ORG 0000HAJMP STARTORG 0030HSTART: MOV DPTR,#0AC03HMOV A,#80HMOV DPTR,#0AC00HMOV A,#05AHMOVX @DPTR,AAJMP $END7. AD转换实验ORG 0000AJMP STARTORG 000BHAJMP INT_0ORG 0030H START: MOV SP,#60HMOV TMOD,#01HMOV TH0,#4BHMOV TL0,#0FDHMOV R4,#2SETB EASETB ET0SETB TR0MOV DPTR,#0E100HMOV A,#3MOVX @DPTR,AMOV 22H,#9MOV 23H,#0MOV 24H,#8MOV 25H,#0 LOOP: MOV R0,#20HMOV R1,#6MOV R2,#1ACALL DISPLAYSJMP LOOPINT_0: MOV TH0,#4BHMOV TL0,#0FDHDJNZ R4,EXITPUSH ACCPUSH DPHPUSH DPLMOV DPTR,#0A000HMOVX A,@DPTRMOV B,#10HDIV ABMOV 21H,AMOVX @DPTR,AMOV R4,#2POP DPLPOP DPHPOP ACCEXIT: RETIDISPLAY: MOV A,@R0MOV 0FH,#8ACALL P164ACALL PBITACALL DELAYMOV A,#0MOVX @DPTR,AINC R0DJNZ R1,DISPLAYRETP164: MOV DPTR,#TABMOVC A,@A+DPTRP164_1: RRC AMOV R3,AMOV ACC.0,CANL A,#0FDHMOV DPTR,#0E102HMOVX @DPTR,AORL A,#0FEHMOVX @DPTR,AMOV A,R3DJNZ 0FH,P164_1MOV 0FH,#8RETPBIT: MOV DPTR,#0E101HMOV A,R2MOVX @DPTR,ARL AMOV R2,ARETDELAY: MOV R6,#4DEL: MOV R7,#250DJNZ R7,$DJNZ R6,DELRETTAB: DB 0FCH,60H,0DAH,0F2H,66H,0B6H,0BEH,0E0H DB 0FEH,0F6H,0EEH,3EH,9CH,7AH,9EH,8EHEND8. DA转换实验ORG 0000SJMP STARTORG 0030HSTART: MOV SP,#60HMOV A,#0LOOP1: MOV DPTR,#0B000HMOVX @DPTR,AACALL XSACALL DELAYINC ACJNE A,#0FFH,LOOP1LOOP2: MOV DPTR,#0B000HMOVX @DPTR,AACALL XSACALL DELAYDEC ACJNE A,#0,LOOP2SJMP LOOP1XS: PUSH ACCMOV DPTR,#TABMOV B,#51DIV ABMOV R1,AXCH A,BMOV B,#5DIV ABMOVC A,@A+DPTRMOV R4,#8ACALL S164MOV A,R1MOVC A,@A+DPTRMOV R4,#8ACALL S164MOV A,#0CLR CMOV R4,#16ACALL S164POP ACCRETS164: RRC AMOV P1.0,CCLR P1.1SETB P1.1DJNZ R4,S164RETDELAY: MOV R7,#200DEl: MOV R6,#229DJNZ R6,$DJNZ R7,DELRETTAB: DB 0FCH,60H,0DAH,0F2H,66H,0B6H,0BEH,0E0H DB 0FEH,0F6H,0EEH,3EH,9CH,7AH,9EH,8EHEND9. 定时器的应用ORG 0000HAJMP STARTORG 00BHAJMP INT_0ORG 0030HSTART: MOV TMOD,#01HMOV TH0,#4BHMOV TL0,#0FDHMOV R0,#20MOV R1,#0SETB ET0SETB TR0SETB EAAJMP $INT_0: MOV TH0,#4BHMOV TL0,#0FDHDJNZ R0,EXITMOV R0,#20MOV A,R1MOV DPTR,#TABMOVC A,@A+DPTRMOV P1,AINC R1CJNE R1,#8,EXITMOV R1,#0EXIT: RETITAB: DB 0FFH,0FAH,0F5H,0AFH,05FH,0AAH,55H,0H,0FFH END10. 开关控制LED的亮灭及速度ORG 0000H ;程序从0000H开始执行AJMP START ;跳转到主程序ORG 0030H ;以免覆盖中断START: MOV R4,#1 ;立即数传送到累加器LOOP: CLR P3.3 ;进位标志位清零LOOP1: JNB P3.5,LOOP ;直接寻址位为0则转移JB P3.4,LOOP2 ;直接寻址位为1则转移JNB P3.4,$INC R4 ;寄存器增1LOOP2: CPL P3.3 ;累加器求反MOV A,R4 ;寄存器内容传送到累加器AMOV R5,A ;累加器内容传送到累加器ACALL DELAY ;调用延时函数AJMP LOOP1 ;循环DELAY: MOV R6,#200DEL: MOV R7,#229DJNZ R7,$DJNZ R6,DEL ;寄存器减1,不为0则转移DJNZ R5,DELAYRET ;子程序返回END11. 计数器实验ORG 0000SJMP STARTORG 001BHLJMP INT_1START: MOV SP,#60HMOV R5,#20MOV TMOD,#15HMOV TH1,#4BHMOV TL1,#0FDHMOV TH0,#0MOV TL0,#0SETB ET1SETB EASETB TR1SETB TR0MOV DPTR,#0E100HMOV A,#3MOVX @DPTR,ALOOP: MOV R0,#50H;MOV R1,#4LCALL DISPLAYSJMP LOOPINT_1: MOV TH1,#4BHMOV TL1,#0FDHDJNZ R5,CONMOV R5,#20PUSH ACCPUSH BMOV A,TL0MOV B,#10HDIV ABMOV 50H,BMOV 51H,AMOV A,TH0MOV B,#10HDIV ABMOV 52H,BMOV 53H,AMOV TH0,#0MOV TL0,#0POP BPOP ACCCON: RETIDISPLAY: MOV A,@R0MOV 0FH,#8ACALL P164ACALL PBITACALL DELAYMOV A,#0MOVX @DPTR,AINC R0DJNZ R1,DISPLAYRETP164: MOV DPTR,#TABMOVC A,@A+DPTR P164_1: RRC AMOV R3,AMOV ACC.0,CANL A,#0FDHMOV DPTR,#0E102HMOVX @DPTR,AORL A,#0FEHMOVX @DPTR,ADJNZ 0FH,P164_1MOV 0FH,#8RETPBIT: MOV DPTR,#0E101HMOV A,R2MOVX @DPTR,ARL AMOV R2,ARETDELAY: MOV R6,#4DEL: MOV R7,#250DJNZ R7,$DJNZ R6,DELRETTAB: DB 0FCH,60H,0DAH,0F2H,66H,0B6H,0BEH,0E0H DB 0FEH,0F6H,0EEH,3EH,9CH,7AH,9EH,8EHEND12. 串并转换实验ORG 0000SJMP STARTORG 0030HSTART: MOV SP,#60HMOV R1,#0MOV DPTR,#TABLOOP: MOV A,#0CLR CMOV R4,#24ACALL S164MOV A,R1MOVC A,@A+DPTRMOV R4,#8ACALL S164INC R1MOV R5,#10ACALL DELAYCJNE R1,#10,EXITMOV R1,#0EXIT: SJMP LOOPS164: RRC AMOV P1.0,CCLR P1.1SETB P1.1DJNZ R4,S164RETDELAY: MOV R6,#200DEL: MOV R7,#230DJNZ R7,$DJNZ R6,DELDJNZ R5,DELAYRETTAB: DB 0FCH,60H,0DAH,0F2H,66H,0B6H,0BEH,0E0H, 0FEH,0F6H END13. 直流电机速度检测ORG 0000HAJMP MAINORG 001BHAJMP INT_1ORG 0030HMAIN: MOV SP,#60HMOV TMOD,#15HMOV TH1,#4BHMOV TL1,#0FDHMOV R0,#20MOV TH0,#0MOV TL0,#0SETB ET1SETB EASETB TR0SETB TR1MOV R2,#00HUP: MOV A,R2MOV DPTR,#0A000H //注意片选接YC2,非YC3MOVX @DPTR,AMOV R5,#1ACALL DELAY ;100msINC R2CJNE R2,#0FFH,UPDOWN:MOV A,R2MOV DPTR,#0A000HMOVX @DPTR,AMOV R5,#1ACALL DELAY ;100msDEC R2CJNE R2,#00H,DOWNAJMP UPINT_1: MOV TH1,#4BHMOV TL1,#0FDHDJNZ R0,EXITMOV R0,#20PUSH ACCPUSH DPHPUSH DPLMOV A,TL0ACALL XSMOV TL0,#0MOV A,TH0ACALL XSMOV TH0,#0POP DPLPOP DPHPOP ACCEXIT: RETIXS: MOV DPTR,#TAB;MOV A,R2MOV B,#10 ;显示10进制数DIV ABXCH A,B;MOV DPTR,#TABMOVC A,@A+DPTRACALL FSXCH A,B;MOV DPTR,#TABMOVC A,@A+DPTRACALL FSRETFS: MOV R1,#8YW:RRC AMOV P1.0,CCLR P1.1SETB P1.1DJNZ R1,YWRETDELAY:MOV R6,#200DEL:MOV R7,#230DJNZ R7,$DJNZ R6,DELDJNZ R5,DELAYRETTAB:DB 0FCH,60H,0DAH,0F2H,66H,0B6H,0BEH,0E0HDB 0FEH,0F6H,0EEH,3EH,9CH,7AH,9EH,8EHEND14. 8255PB外接8个开关,编程将开关状态显示在数码管上(串并转换动态扫描方式)ORG 0000AJMP STARTORG 0030HSTART: MOV DPTR,#0AC03HMOV A, #82HMOVX @DPTR, AMOV DPTR,#0E100HMOV A,#3MOVX @DPTR,ALOOP: MOV DPTR,#0AC01HMOVX A,@DPTRMOV B,#10HDIV ABMOV 10H,BMOV 11H,AMOV R0,#10HMOV R1,#2MOV R2,#1ACALL DISPLAYSJMP LOOPDISPLAY:MOV A,@R0MOV 0FH,#8ACALL P164ACALL PBITACALL DELAYMOV A,#0MOVX @DPTR,AINC R0DJNZ R1,DISPLAYRETP164: MOV DPTR,#TABMOVC A,@A+DPTRP164_1: RRC AMOV R3,AMOV ACC.0,CANL A,#0FDHMOV DPTR,#0E102HMOVX @DPTR,AORL A,#0FEHMOVX @DPTR,ADJNZ 0FH,P164_1MOV 0FH,#8RETPBIT: MOV DPTR,#0E101HMOV A,R2MOVX @DPTR,ARL AMOV R2,ARETDELAY: MOV R6,#4DEL: MOV R7,#250DJNZ R7,$DJNZ R6,DELRETTAB:DB 0FCH,60H,0DAH,0F2H,66H,0B6H,0BEH,0E0HDB 0FEH,0F6H,0EEH,3EH,9CH,7AH,9EH,8EHEND15. P3.4接开关K,编程将开关拨动次数,通过串并转换的方式进行显示ORG 0000SJMP STARTORG 0030HSTART: MOV SP,#60HMOV R5,#0LOOP: JB P3.4,$ACALL DELAYJB P3.4,LOOPINC R5ACALL XSLOOP1: JNB P3.4,$ACALL DELAYJNB P3.4,LOOP1INC R5ACALL XSSJMP LOOPDELAY: MOV R7,#200DEL: MOV R6,#229DJNZ R6,$DJNZ R7,DELRETXS: MOV DPTR,#TABMOV A,R5MOV B,#10HMOV R1,AMOV A,BMOVC A,@A+DPTRMOV R4,#8ACALL S164MOV A,R1MOVC A,@A+DPTRMOV R4,#8ACALL S164MOV A,#0CLR CMOV R4,#16ACALL S164RETS164: RRC AMOV P1.0,CCLR P1.1SETB P1.1DJNZ R4,S164RETTAB: DB 0FCH,60H,0DAH,0F2H,66H,0B6H,0BEH,0E0HDB 0FEH,0F6H,0EEH,3EH,9CH,7AH,9EH,8EHEND16. 比较片内RAM30H、31H两个单元值的大小,将较大的数显示在数码管上ORG 0000SJMP STARTORG 0030HSTART: MOV SP,#60HMOV DPTR,#0E100HMOV A,#3MOVX @DPTR,AMOV 30H,#06H ;随便赋两个值,显示较大的MOV 31H,#11HMOV A,30HSUBB A,31HJC SMALLMOV B,#10HMOV A,30HDIV ABMOV 30H,BMOV 31H,ABIG: MOV R0,#30HMOV R1,#2MOV R2,#1ACALL DISPLAYSJMP BIG SMALL: MOV B,#10HMOV A,31HDIV ABMOV 30H,BMOV 31H,ASMALL1:MOV R0,#30HMOV R1,#2MOV R2,#1ACALL DISPLAYSJMP SMALL1 DISPLAY:MOV A,@R0MOV 0FH,#8ACALL P164ACALL PBITACALL DELAYMOV A,#0MOVX @DPTR,AINC R0DJNZ R1,DISPLAYRETP164: MOV DPTR,#TABMOVC A,@A+DPTR P164_1: RRC AMOV R3,AMOV ACC.0,CANL A,#0FDHMOV DPTR,#0E102HMOVX @DPTR,AORL A,#0FEHMOVX @DPTR,AMOV A,R3DJNZ 0FH,P164_1MOV 0FH,#8RETPBIT: MOV DPTR,#0E101HMOV A,R2MOVX @DPTR,ARL AMOV R2,ARETDELAY: MOV R6,#4DEL: MOV R7,#250DJNZ R7,$DJNZ R6,DELRETTAB:DB 0FCH,60H,0DAH,0F2H,66H,0B6H,0BEH,0E0HDB 0FEH,0F6H,0EEH,3EH,9CH,7AH,9EH,8EHEND17. 单片机P1口接8个开关,编程将开关状态显示在数码管上(串并转换动态扫描方式)ORG 0000HSJMP STARTORG 0030HSTART: MOV SP,#60HMOV DPTR,#0E100HMOV A,#3MOVX @DPTR,ALOOP: MOV A,P1MOV B,#10HDIV ABMOV 20H,BMOV 21H,AMOV R0,#20HMOV R1,#2MOV R2,#1ACALL DISPLAYAJMP LOOPDISPLAY:MOV A,@R0MOV 0FH,#8ACALL P164ACALL PBITACALL DELAYMOV A,#0MOVX @DPTR,AINC R0DJNZ R1,DISPLAYRETP164: MOV DPTR,#TABMOVC A,@A+DPTRP164_1: RRC AMOV R3,AMOV ACC.0,CANL A,#0FDHMOV DPTR,#0E102HMOVX @DPTR,AORL A,#0FEHMOVX @DPTR,AMOV A,R3DJNZ 0FH,P164_1MOV 0FH,#8RETPBIT: MOV DPTR,#0E101HMOV A,R2MOVX @DPTR,ARL AMOV R2,ARETDELAY: MOV R6,#4DEL: MOV R7,#250DJNZ R7,$DJNZ R6,DELRETTAB:DB 0FCH,60H,0DAH,0F2H,66H,0B6H,0BEH,0E0H DB 0FEH,0F6H,0EEH,3EH,9CH,7AH,9EH,8EHEND18. 将片内50H单元的值显示在数码管上ORG 0000HSJMP STARTORG 0030HSTART: MOV SP,#60HMOV DPTR,#0E100HMOV A,#3MOVX @DPTR,ALOOP: MOV A,P1MOV B,#10HDIV ABMOV 20H,BMOV 21H,AMOV R0,#20HMOV R1,#2MOV R2,#1ACALL DISPLAYAJMP LOOPDISPLAY:MOV A,@R0MOV 0FH,#8ACALL P164ACALL PBITACALL DELAYMOV A,#0MOVX @DPTR,AINC R0DJNZ R1,DISPLAYRETP164: MOV DPTR,#TABMOVC A,@A+DPTRP164_1: RRC AMOV R3,AMOV ACC.0,CANL A,#0FDHMOV DPTR,#0E102HMOVX @DPTR,AORL A,#0FEHMOVX @DPTR,AMOV A,R3DJNZ 0FH,P164_1MOV 0FH,#8RETPBIT: MOV DPTR,#0E101HMOV A,R2MOVX @DPTR,ARL AMOV R2,ARETDELAY: MOV R6,#4DEL: MOV R7,#250DJNZ R7,$DJNZ R6,DELRETTAB:DB 0FCH,60H,0DAH,0F2H,66H,0B6H,0BEH,0E0HDB 0FEH,0F6H,0EEH,3EH,9CH,7AH,9EH,8EHEND19. 开关K1接P1.0,K2接P1.1,编程实现当按下K1时在数码管上显示50H单元的值,按下K2在数码管上显示51H单元的值ORG 0000SJMP STARTORG 0030HSTART: MOV SP,#60HMOV DPTR,#0E100HMOV A,#3MOVX @DPTR,AMOV 50H,#18H ;50H,51H 随便赋两个值MOV 51H,#22HLOOP:JB P1.0,D50JB P1.1,D51SJMP LOOPD51: MOV R0,#10HMOV R1,#2MOV R2,#1MOV A,51HMOV B,#10HDIV ABMOV 10H,BMOV 11H,AACALL DISPLAYSJMP LOOPD50: MOV R0,#10HMOV R1,#2MOV R2,#1MOV A,50HMOV B,#10HDIV ABMOV 10H,BMOV 11H,AACALL DISPLAYSJMP LOOPDISPLAY:MOV A,@R0MOV 0FH,#8ACALL P164ACALL PBITACALL DELAYMOV A,#0MOVX @DPTR,AINC R0DJNZ R1,DISPLAYRETP164:MOV DPTR,#TABMOVC A,@A+DPTRP164_1:RRC AMOV R3,AMOV ACC.0,CANL A,#0FDHMOV DPTR,#0E102HMOVX @DPTR,AORL A,#0FEHMOVX @DPTR,AMOV A,R3DJNZ 0FH,P164_1MOV 0FH,#8RETPBIT:MOV DPTR,#0E101HMOV A,R2MOVX @DPTR,ARL AMOV R2,ARETDELAY:MOV R6,#4DEL:MOV R7,#250DJNZ R7,$DJNZ R6,DELRETTAB:DB 0FCH,60H,0DAH,0F2H,66H,0B6H,0BEH,0E0H DB 0FEH,0F6H,0EEH,3EH,9CH,7AH,9EH,8EHEND。
51单片机数码管的程序代码
}
3.依次流水作业
#include <reg52.h>
#define uchar unsigned char
#define uint unsigned int
sbit line= P1^3; //点阵
sbit led= P1^2;
duan=1; P0=table[shi]; _nop_();
//显示十位
_nop_(); _nop_(); duan=0; P0=0xff; wei=1; P0=0xFb; wei=0; delay(3);
duan=1; P0=table[ge]; _nop_(); _nop_(); _nop_(); duan=0; P0=0xff; wei=1; P0=0xF7; wei=0; delay(3);
unsigned char code weisn[]=
{
0xfe,0xfd,0xfb,0xf7,0xef,0xdf,0xbf,0x7f};
uint y,s,a,b;
void delay ( uint);
void main ()
{
P0=0X00;
line=0;//关闭点阵
P0=0xff; led=0;//关闭 led
5,DS18B20 温度计程序代码
#include "reg52.h"
#include "intrins.h"
#define uchar unsigned char
#define uint unsigned int
sbit ds=P1^4; //18B20 信号端口 sbit duan=P1^0; //数码管段码控制端
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
51单片机汇编按键数码管程序
1、硬件设计
本设计实现用按键控制数码管从0到9显示。
首先设计硬件电路,连接晶振电路、按键连接到外部中断引脚P3.2、数码管使用共阴数码管连接P2.0~P2.6,如图1。
图1 硬件电路
2、程序设计
ORG 0000H
LJMP MAIN ;跳转到主函数
ORG 0003H ;中断入口
LJMP INT0SUB ;中断服务函数
ORG 0040H ;程序存放起始地址
MAIN: MOV SP,#30H ;堆栈指针指向30H
MOV A,#81H ;赋值81H,用于配置外部中断
MOV IE,A ;使能外部中断
MOV A,#01H ;用于配置触发方式
MOV TCON,A ;触发方式选择下降沿触发
MOV R0,#00H ;按键初始值为零
MOV DPTR,#TABLE ;数据表首地址
LCALL DISPLAY ;调用显示函数
JMP MAIN
;共阴数码管0~9数据表
TABLE: DB 3FH,06H,5BH,4FH,66H,6DH,7DH,07H,7FH,6FH
DISPLAY:
MOV A,R0 ;取出按键值
MOV B,#0AH ;用于按键值处理
DIV AB ;A除以B
MOV A,B ;将余数放到累加器A
MOVC A,@A+DPTR ;取出数据对应数码管数据 MOV P2,A ;数码管显示
JMP DISPLAY ;显示循环
INT0SUB: ;按键外部中断服务函数
INC R0 ;R0自加1
RETI ;中断返回
DELAY30: MOV R7,#0FFH ;延时函数
D0: MOV R6,#0FFH
D00: MOV R5,#0FFH
D1: DJNZ R5,D1;
D10: DJNZ R6,D10;
DJNZ R7,D0
RET
END ;结束。