GM120如何使用轨迹功能并计算面积
使用轨迹测量工具

使用轨迹测量工具您将使用轨迹测量工具来手动绘线并测量多个端点的周长,然后自动测量PCB 上的其它轨迹。
1.点击测量工具栏上的轨迹按钮。
出现创建轨迹消息框。
轨迹测量工具主要用于对多条非单一直线进行测量。
在下述操作步骤中,首先用此工具的手动模式测量多个端点,然后以自动模式测量一个轨迹。
2.如下图所示,将光标放置到电路末端的底部,然后点击鼠标左键以定义测量线的起点。
如下图所示,移动光标到每个点上,然后在每个位置点击鼠标左键。
这将产生一个折线(由多条连续线段构成的线)。
将光标放到此处3. 当定义完上述每个点后,点击鼠标右键以结束此折线的测量。
此时,电路的末端处于突出显示状态。
4. 测量结果将出现在测量窗口的数据表中,并且在图像中将绘出和标记此测量。
请注意,此测量被标记为T1。
T表示这是一个轨迹测量,1表示这是此组数量中的第一次轨迹测量。
5. 要进行自动轨迹测量,需要找到和启用屏幕上外框对话框中的自动轨迹复选框。
启用自动跟踪当激活了轨迹测量工具时,将自动打开外框对话框。
可在外框对话框中控制Image-Pro Plus自动轨迹测量的特性。
当选中了自动轨迹复选框后,Image-Pro Plus便会自动测量您所指定的图像边缘。
6. 将平滑选项设置为5。
此选项将使得Image-Pro Plus产生一个平滑的轨迹,并将忽略因沿着图像边缘的局部像素变化而引起的每个角和裂缝。
7.如下图所示,将光标放到边缘的起始位置,然后点击鼠标左键一次。
此动作确定了测量线的第一个点。
8.将光标移到距边缘几个像素的位置(见下图),然后再次点击一次鼠标左键。
Image-Pro Plus 开始连续测量此轨迹的边缘,直到到达了图像的边界为止。
(您可在测量期间通过点击鼠标右键来中止自动轨迹测量操作。
)作为本练习的说明,Image-Pro Plus 的自动轨迹测量工具要求您沿着您要测量的边缘定义两个点。
第一个点指定线的开始(见上述第7步),第二个点指定所要描绘的线的方向。
Holux GM120手持GPS 用户手册 简体中文版V1.0-20090716
安全注意事项 请阅读并了解所有指示。 使用本产品时请注意安全注意事项以减少起火、触电或受伤的危险。 请勿拆卸本机。本产品内部没有可以由使用者更换的零件。
servicegpszonecn目录目录目录目录介绍gm120开启关闭gps功能在关闭卫星信号时使用gm1209查看罗盘页10使用gm12011使用简单模式11设定原点位置11使用导航功能11校正罗盘12使用专家模式12使用航点功能12建立航点12修改航点13删除航点13使用航线功能并计算面积14建立航线14编辑航线及查看航线面积14使用轨迹功能并计算面积16建立轨迹记录16查看轨迹记录信息并计算面积17使用开启捷径方式功能17使用地图比例功能17使用测量距离功能18查看行程状态18旅行重置19更改行程选项19使用寻宝模式20设定宝藏信息20开始寻宝20使用运动模式21运动设定21设定计时器21设定距离21设定步调21设定速率21设定圈距22设定自动暂停22其他设定23开始运动23查看运动历史记录23删除运动记录24查看运动中的罗盘信息24调整系统设定25设定125设定地图方向25设定卫星状态25设定226设定显示单位26设定坐标格式26设定waasegnos27设定327设定背光27设定提示音27设定开机画面28设定时间28设定坐标投影28设定基准面29冷开机29恢复出厂设定31查看系统信息31传输资料31连接31开始传输资料32使用maproute33系统需求33功能33文件菜单33显示菜单33工具菜单35传输菜单40语言菜单44关于菜单45附录46故障排除46规格47产品保修卡49介绍介绍介绍介绍gm120产品概述产品概述产品概述产品概述感谢您购买holuxgm120手持gpsgm120是一款使用简便功能多样的手持gps可让您在体验户外运动时无须担心在不熟悉的地方迷路
OPM 120数字锁定器和位置器的操作指南说明书

SUMMARY:ing the keypad (3)1. Restoring default parameters values (5)2.Motion Wiz (6)2. Configuration step (Step1.dat) (6)3.Speed control loop calibration (13)4.OPM 120 Digital lock and positioner (17)5.Speed Feedback Change (20)1.Cyclically moves cursor positionto next fieldIncrements/decrements valueat cursorEnters the change into driveShift – additional/specialfunctionsCursor moved by ‘T’For use the key-pad you can see the user’s manual, here we can see only a picture:With this information we are able to set the drive in the DEF mode1. Restoring default parameters values1) We assume that the drive is not in DEF mode.2) Change these bits as follow (look the user’s manual):- Pb40.9 = 0 or HW enable- Pb39.13 = 0- Pb42.12 = 1- Pb42.14 = 1- Pb42.15 = 1.3) Switch off and on the drive… we can see the label DEF on the keypad (Pr23=15). If youare not able to see all the parameters on the key-pad probably you are in lock mode….Unlock the key-pad!In this chapter we learn to use MotionWiz and take familiarity with the drive.2. Configuration step (Step1.dat)We build step by step the file named Step1.dat:1) Open MotionWiz:2) We can find and see some information (look the pictures):3) Select the drive (HiDrive 2A) and the motor (SMB^60^30^1.4^220).(You can see the different options between drive and motor type).Push ENTER button and go to the next step (step 4):4) Look at the bar on the top… the file name is “No name*”; is meaning that is nececessary(not obbligation!) save the file. The star displaies that the user has made some change, we can understand better in the next steps.5) Save this file (Step1) on the PC… push “Save” button:Now we can see the result on the main page (the star is not present…):6) Now we can download the file in the drive: push the button Config and autodetect the serialconfiguration. After this operation select OK botton and DON’T PRESS OnLine ikon!Look the top bar… we can see the star after the file name, it’s meaning that somthing is changed… the serial configuration parameters are changed!!7) In this step we have the file stored in the MotionWiz memory and have the correctparameters for establishing the serial comunication between drive and PC.Select Send button and follow the indication from MotionWiz. Switch off and on the drive, thisprocedure is necessary because some parameters actualize their values only after this HW procedure.See the key-pad… the drive is not in DEF mode. Go on step 8.8) Now we can press OnLine ikon without wary about the text inside of the MsgBox thatMotionWiz diplaies:9) See the indications inside of this window:At this step the MotionWiz and the drive are match together… if you change someparameters on the drive the MotionWiz change according to this change and if you changesomething on MotionWiz the parameters on the drive change too.Try to menage thewindows on the PC…. Step 1010) Open the Alarms windows and make some changes like resolver error (disconnect theResolver cable) and see the result on the key-pad…Reset Alarms ikon…“PC parameters”“Drive parameters”Comunication11) In this step we have the drive in IDLE, the parameters and the Pico-plc in default mode. Wecan control the motor… try some actions on the MotionWiz… try to change the Pico-plc (change Pb90.3 with 90.0 for stop and run the motor…). Remember that is necessary put the comunications not enable, change the Pico-plc instructions and go in OnLineTry to make some windows changing and see the motor..12) At this point we can try to put Step1.dat directly on the drive. For do this operation set theDEF mode on the drive by the key-pad and restart MotionWiz.Select Step1.dat from the PCSet the serial configurationSend the file on the drive.Save, switch off and on the drive….Try to control the motor … OK!!3.In this chapter we want restore the file named AvantiIndietro.dat, send it to the drive, give some advise about the Pico-plc confidence with MotionWiz Oscilloscope window.Before going in OnLine see the Pico-plc, try to put new line comments and print it with some label like SW revision author etc. (see the pictures):Be carefull that if you see the Pico-plc after the OnLine action you don’t see the comments…. The notes are not store in the drive but they are store only in the file!!.So, if you have restore a file, go OnLine, save the file you have loose the commentsSee the Oscilloscope window:This waveform is the result with these parameters values:Modify these values, for example:The waveform is:Change the values for have oscillations:Return with the correct values: Pr16=62 and Pr17=800.If we want the better reaction from the system put Pr16=200:Chapter End!!4.In this chapter we see a simple example of position.1) Put the drive in the DEF mode.2) Send Step1.dat to the drive3) Save the file on the drive4) Switch off and on the drive5) Go OnLineSelect OPM120:Confirm the MSGBOX… At this point we have the drive in OPM120 (see the key-pad during this operation!!):Select speed control, Set point and see the Pr40.2 is automatically change…Return to the main page and select digital lock & positioner,”the arrow”and trapezional profile generator:With the HW enable you can put Final Position = 10000 and see the motor… turn clockwise!! If you put 0 the motor turn unclockwise…You can see the profile with the Oscilloscope window…(Pr213:212=100000)5.In this chapter we link another motor to the drive; this motor has a Less Wiring Encoder feedback. The first operation is connect the motor to the drive at terminal X7 (link together PTC pins…). Using the key-pad put the drive in DEF mode:- Pb39.13 = 0- Pb42.12 = 1- Pb42.14 = 1- Pb42.15 = 1.- Switch off and on the driveOpen MotionWiz, select drive end motor:Push ENTER button and save these settings in LessWirinig.dat file (Save ikon).Push Config button and autodetect the serial link.Send the file on the drive (Send ikon).Save and switch off and on the driveGo OnLine:Open the Alarms Window:You can see error 25 (in the key-pad the message is the same..) and it’s correct because we don’tIn this window select: LessWiring, -2048 (- is…) and 5V:Save, switch off and on the drive…. You are in IDLE mode… procedure END!!At this point you can control the motor how displyed to the top of this document: speed, positioner,etc…The same philosophy is implemented for select the feedback position…. See it in the MotionWiz.. Try to download only the Pico-plc from AvantiIndietro.dat…..I have build this file AvInLessWiring.dat and we try to restore it on the drive in DEF mode…。
MGTG使用说明1

使用说明一、主界面快捷键1、怎样保存航点?点击主界面中的“保存航点”快捷键,进入保存航点页面,对航点属性进行设置,设置好后点确定,这样就保存了一个新航点。
2、航迹法测面积点击主界面中的“测面积”快捷键,进入保存航迹页面,对航迹进行设置,点确定回到主界面,在起点处点开始键开始记录航迹,当绕着地面走一圈回到起点时点结束键结束记录航迹,再次出现编辑航迹页面,这时航线属性信息中出现测量结果。
3、自定义航点选择“自定义航点”工具,点击屏幕出现保存航点页面,将已知点的经纬度和高程输入到相应位置,点确定保存航点,这样就将已知点保存到了航点中。
二、主菜单1、如何设置坐标?打开坐标设置在椭球基准下拉框里面选择要定义的坐标系统,DX、DY、DZ根据当地参数填写,勾选设置投影参数,原点经度处填入当地中央子午线,假东处填写500000,其他参数按默认设置。
2、导航功能选择“导航信息”进入导航信息页面,点击“导航”,选择某点进行导航,这时目标就变成了所选择的航点,当到达目的地附近时,在地图页面会显示提示,点击提示,停止导航,我们也可以在导航信息页面,选择“停止”来结束导航。
3、航点法测面积所谓航点法测面积:就是采集多个航点并保存到同一条航线上,计算航线所围成的多边形面积来达到测面积的目的例如:我们要测一块5边形地块的面积,我们在A点保存航点“A”,并把它保存到一个新航线“L1”;然后我们走到B点,保存航点“B”,并把航点“B”保存到A点新建的航线“L1”中;我们再走到C点保存航点“C”,并把航点“C”保存到航线“L1”中;这样我们依次采集航点“D”,“E”,并都把它们保存到航线“L1”中。
最后我们得到五个航点“A”、“B”、“C”、“D”、“E”和一条由这五个航点组成的航线“L1”,我们回到主菜单,选择查看航线,查看航线“L1”的详细信息就可以得到这个五边形的面积。
莱卡1201使用方法
1
1
1
马达驱动
1
1
1
1
1
自动目标识别与照准(ATR)
1
1
1
1
超级搜索(PS)
1
1
导向光(EGL)
可选
可选
可选
1
1
1
1
遥控器RCS1100
可选
可选
可选
可选
可选
可选
可选
SmartStation(ATX1230)
可选
可选
可选
可选
可选
可选
可选
角度测量
类型
1201
1202
1203
1205
精度(ISO17123-3)
湿度?
?95%,无凝结
容量?
3.8Ah
调焦范围?
?1.7m至无穷远
操作时间?
?6–8小时
数据存储
工作环境?
内存
?CF卡(32MB和256MB)
工作温度?
?-20°C~+50°C
仪器内存?
32MB(可选)
存放温度?
?-40°C~+70°C
数据存储量?
?~1750/MB
防尘/防水?
(IEC60529)?
?IP54
接口?
?RS232,蓝牙(可选)
PinPointR300
500m/>500m(柯达灰板:90%反射率)
最短测程
1.5m
圆棱镜长测程
7500m/>10000m
光斑尺寸
20m处
约7mm×14mm
100m处
约12mm×40mm
测量原理
PinPointR100
卫星定位导航系统原理及应用串讲课件

39
GPS卫星信号结构---载波
作用
搭载其它调制信号 测距
L1
19.03c m
测定多普勒频移
L2
类型
24.42c m
目前
L1 – 频率: 154f0 = 1575.43MHz;波长:19.03cm L2 – 频率: 120f0 = 1227.60MHz;波长:24.42cm
4
GPS系统的特点
第三,实时定位
利用GPS导航,可以实时地确定运动目 标的三维位置和速度,由此既可保障运动载 体沿预定航线运行,也可实时监测和修正航 行路线,选择最佳航线。
5
美国政府的GPS政策
美国政府在GPS设计中计划提供两种服务: 一种为精密定位服务(PPS),利用P码进行定位,只提
供给本国及其盟国的军方和得到特许的民间用户使用, 估计其定位精度为10m。 另一种为标准定位服务(SPS),利用C/A码定位,提供给 民间用户使用。由于C/A码作为捕获P码之前的前导码, 是一种粗捕获的明码,因此估计SPS的定位精度约为 400m。
x=F1(B,L) y=F2(B,L) 由于椭球面是一个曲面,我们不可能把它铺展成 一个平面而不产生某种褶皱和破裂,也就是不可 能把整个椭球面或其一部分曲面毫无变形地表示 在一个平面上,因此无论对投影函数F1和F2选得 如何妥当,总是不可避免地产生变形。
21
地图投影的分类
按其变形性质分: 等角投影:投影后,地图上任意两相交短线之间的夹角 保持不变。 等面积投影:投影后,地图上面积大小保持正确的比例 关系。 等距投影:投影后,地图上从某一中心点到其它点的距 离保持不变。 方位投影:投影后,地图上表示的任一点到某一中心点 的方位角保持不变。
使用轨迹功能并计算面积

GM120如何使用轨迹功能并计算面积在轨迹记录菜单中,您可以调整轨迹记录设定、更改轨迹记录模式并查看轨迹记录信息。
GM-120具有轨迹记录并根据轨迹计算面积的功能,最多可保存8条轨迹,每条最多2500个航迹点。
建立轨迹记录并查看面积的一般步骤:设置轨迹记录参数—记录轨迹—查看轨迹信息(长度、面积),详细如下(需在GM120已经成功定位的情况下进行操作,如何查看定位情况见备注第1条):设置轨迹记录参数:1.在GM120的专家模式下,按下菜单键显示菜单选项。
2.选择“轨迹”选项,按确认键。
3.在“轨迹”标签页下(本说明书右上角大图),使用方向键选中(字体白色、背景黑色为选中)“目前轨迹”字段,按确认键显示下拉菜单,按向下键将“关”改选为“单笔记满”后按确认键确定该选项。
4.此时,按向右的方向键进入“模式”标签,按下列步骤将轨迹记录方式改为按时间间隔记录:●选择“按时间记录”,然后按确认键查看下拉菜单选项。
使用方向键选择轨迹点记录的间隔时间(一般选择“每隔5秒钟”)。
●“按距离记录”选项如为“----”,则不用更改,否则将其更改为“----”,即不按距离记录。
5.完成以上“模式”选项设置后使用向下的方向键选中屏幕右下角的“√”按钮,按确认键保存设置。
记录轨迹:6.此时,机器已经在记录轨迹了,您可以沿着要测量面积的地物边界走一个闭合图形,记住出发点的大概位置,走回到该位置时按第4步操作进入“轨迹”标签页,将“目前轨迹”选项设定为“关”。
7.在“轨迹”标签页面中(本说明书右上角大图)按下菜单键弹出6项下拉菜单,选择下列选项:●选择第2项——“储存目前轨迹”将缓存中的轨迹点保存到机器内存中并生成一个轨迹文件。
●本机最多可存储8条轨迹,被选中轨迹的周围会有虚线框围绕,如只有只有一个轨迹文件,则其默认被选中,可参考本说明书右上角大图。
查看轨迹信息(长度、面积):8.按向右的方向键两次或者向左的方向键一次进入“信息”标签页,查看当前被选中的轨迹的距离和面积等信息。
千寻魔方 MC120M 北斗高精度定位模组数据手册说明书
3.1 管脚定义 ..............................................................................................................................................................9 3.2 管脚定义表 ..........................................................................................................................................................9 3.3 参考设计 ........................................................................................................................................................... 10 3.4 机械尺寸 ........................................................................................................................................................... 11
2 模组接口说明 .........................................................................................................................................................7
气溶胶灭火系统操作说明

热气溶胶灭火装置使用说明书目录第一章概述 (2)第二章S型热气溶胶灭火装置的灭火原理 (2)第三章S型热气溶胶灭火装置适用围和不适用围 (2)第四章S型热气溶胶灭火装置构成及型号编制 (3)第五章S型热气溶胶灭火装置的主要技术参数 (4)第六章S型热气溶胶灭火装置简明设计指南 (4)第七章S型热气溶胶灭火装置系统控制模式 (5)第八章S型热气溶胶灭火装置的安装、日常维护和使用 (6)第一章概述环保洁净型自动灭火装置(以下简称S型自动灭火装置)是利用现代化工技术自行研制和生产的环保型混合气体灭火产品。
本产品无毒、无污染、无公害,灭火效率高、压力低、无残留物、对被保护物无腐蚀、安全性强、不存在F、Cl、Br、CO等有害物质,ODP=0、GWP ≤0.35、不破坏大气臭氧层。
是目前消防领域代替哈龙产品的理想产品。
第二章 S型热气溶胶灭火装置的灭火原理1、S型灭火剂的特性S型灭火剂是一种固体含能化学物质,属于烟火药剂。
利用电子气化启动器激活S型灭火剂,使其发生化学反应,能产生大量惰性气体、水汽和微量固体颗粒,形成混合气体,混合气体从S型自动灭火装置的喷口向外释放喷射,扑灭火灾。
2、S型自动灭火装置的灭火原理S型自动灭火装置的灭火机理是以物理、化学、水汽降温三种灭火方式同时进行的全淹没灭火形势:a、以物理性稀释空气中氧气“窒息灭火”为主要方式,切断火焰反应链进行链式反应破坏火灾现场的燃烧条件,迅速降低自由基的浓度;b、存在抑制链式燃烧反应进行的化学灭火方式;c、水蒸汽冷凝与气化降低燃烧物温度。
第三章 S型热气溶胶灭火装置适用围和不适用围1、适用围S型灭火系统为全淹没系统,适用于扑灭相对封闭空间的A、B类火灾以及电气电缆初起火灾。
a、扑灭A类火灾:如木材、纸等固体物质初起火灾,适用于木制品库、档案库、博物馆、图书馆、资料室等场所;b.扑灭B类火灾:适用于生产、使用或贮存柴油(-35号柴油除外)、重油、变压器油、动物油、植物油等各种丙类可燃液体场所的火灾;c.扑灭电气电缆火灾:适用于变(配)电间、发电机房、电缆夹层、电缆井、电缆沟、电子计算机房、通讯房等场所的火灾。
GIS学习笔记——地图投影与GPS参数计算要点
GIS学习笔记——地图投影与GPS参数计算1、椭球体GIS中的坐标系定义由基准面和地图投影两组参数确定,而基准面的定义则由特定椭球体及其对应的转换参数确定。
基准面是利用特定椭球体对特定地区地球表面的逼近,因此每个国家或地区均有各自的基准面。
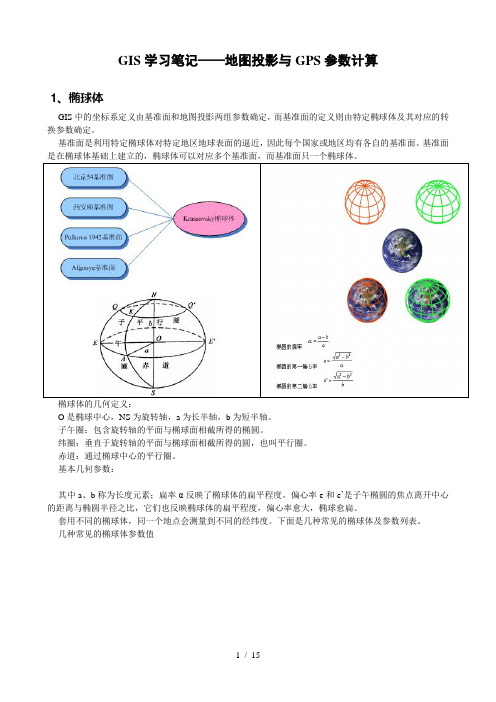
基准面椭球体的几何定义:O是椭球中心,NS为旋转轴,a为长半轴,b为短半轴。
子午圈:包含旋转轴的平面与椭球面相截所得的椭圆。
纬圈:垂直于旋转轴的平面与椭球面相截所得的圆,也叫平行圈。
赤道:通过椭球中心的平行圈。
基本几何参数:其中a、b称为长度元素;扁率α反映了椭球体的扁平程度。
偏心率e和e’是子午椭圆的焦点离开中心的距离与椭圆半径之比,它们也反映椭球体的扁平程度,偏心率愈大,椭球愈扁。
套用不同的椭球体,同一个地点会测量到不同的经纬度。
下面是几种常见的椭球体及参数列表。
几种常见的椭球体参数值2、地图投影地球是一个球体,球面上的位置,是以经纬度来表示,我们把它称为“球面坐标系統”或“地理坐标系統”。
在球面上计算角度距离十分麻烦,而且地图是印刷在平面纸张上,要将球面上的物体画到紙上,就必须展平,这种将球面转化为平面的过程,称为“投影”。
经由投影的过程,把球面坐标换算为平面直角坐标,便于印刷与计算角度与距离。
由于球面無法百分之百展为平面而不变形,所以除了地球仪外,所有地图都有某些程度的变形,有些可保持面积不变,有些可保持方位不变,视其用途而定。
目前国际间普遍采用的一种投影,是即横轴墨卡托投影(Transverse Mecator Projection),又称为高斯-克吕格投影(Gauss-Kruger Projection),在小范围内保持形状不变,对于各种应用较为方便。
我们可以想象成将一个圆柱体橫躺,套在地球外面,再将地表投影到这个圆柱上,然后将圆柱体展开成平面。
圆柱与地球沿南北经线方向相切,我们将这条切线称为“中央经线”。
在中央经线上,投影面与地球完全密合,因此图形没有变形;由中央经线往東西两侧延伸,地表图形会被逐渐放大,变形也会越来越严重。
数控铣床GM常用代码解释
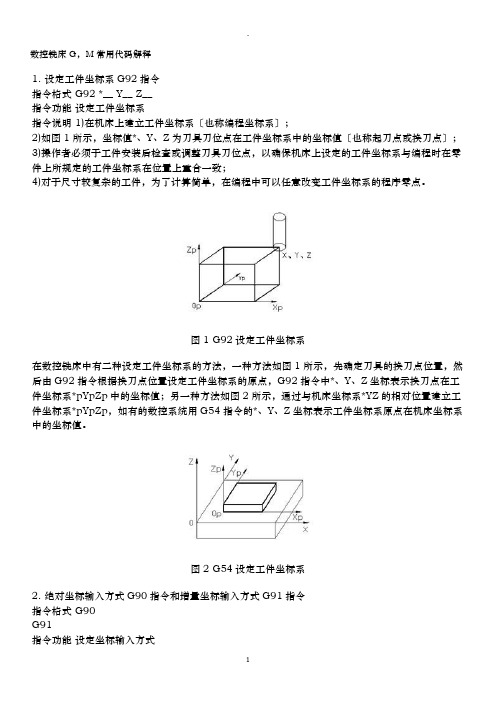
数控铣床G,M常用代码解释1. 设定工件坐标系G92指令指令格式 G92 *__ Y__ Z__指令功能设定工件坐标系指令说明 1)在机床上建立工件坐标系〔也称编程坐标系〕;2)如图1所示,坐标值*、Y、Z为刀具刀位点在工件坐标系中的坐标值〔也称起刀点或换刀点〕;3)操作者必须于工件安装后检查或调整刀具刀位点,以确保机床上设定的工件坐标系与编程时在零件上所规定的工件坐标系在位置上重合一致;4)对于尺寸较复杂的工件,为了计算简单,在编程中可以任意改变工件坐标系的程序零点。
图1 G92设定工件坐标系在数控铣床中有二种设定工件坐标系的方法,一种方法如图1所示,先确定刀具的换刀点位置,然后由G92指令根据换刀点位置设定工件坐标系的原点,G92指令中*、Y、Z坐标表示换刀点在工件坐标系*pYpZp中的坐标值;另一种方法如图2所示,通过与机床坐标系*YZ的相对位置建立工件坐标系*pYpZp,如有的数控系统用G54指令的*、Y、Z坐标表示工件坐标系原点在机床坐标系中的坐标值。
图2 G54设定工件坐标系2. 绝对坐标输入方式G90指令和增量坐标输入方式G91指令指令格式 G90G91指令功能设定坐标输入方式指令说明 1)G90指令建立绝对坐标输入方式,移动指令目标点的坐标值*、Y、Z表示刀具离开工件坐标系原点的距离;2)G91指令建立增量坐标输入方式,移动指令目标点的坐标值*、Y、Z表示刀具离开当前点的坐标增量。
3. 快速点定位G00指令指令格式 G00 *__ Y__ Z__指令功能快速点定位指令说明 1)刀具以各轴定的速度由始点〔当前点〕快速移动到目标点;2)刀具运动轨迹与各轴快速移动速度有关;3)刀具在起始点开场加速至预定的速度,到达目标点前减速定位。
例题1 如图3所示,刀具从A点快速移动至C点,使用绝对坐标与增量坐标方式编程。
图3 快速定位绝对坐标编程G92 *0 Y0 Z0 设工件坐标系原点,换刀点O与机床坐标系原点重合G90 G00 *15 Y-40 刀具快速移动至Op点G92 *0 Y0 重新设定工件坐标系,换刀点Op与工件坐标系原点重合G00 *20 Y10 刀具快速移动至A点定位*60 Y30 刀具从始点A快移至终点C用增量值方式编程G92 *0 Y0 Z0G91 G00 *15 Y-40G92 *0 Y0G00 *20 Y10*40 Y20在上例题中,刀具从A点移动至C点,假设机床定的*轴和Y轴的快速移动速度是相等的,则刀具实际运动轨迹为一折线,即刀具从始点A按*轴与Y轴的合成速度移动至点B,然后再沿* 轴移动至终点C。
第三章保证船舶具有适度的稳性海上货物运输
2023/5/22
第三章保证船舶具有适度的稳性海上 货物运输
船舶稳性(STABILITY)
稳性的定义和分类
•第 船横三舶倾初 力章稳 矩性船舶稳性
船舶大倾角稳性 船舶动稳性 稳性规范及稳性检验调整 船舶随浪稳性和破舱稳性
第三章保证船舶具有适度的稳性海上 货物运输
过正浮水线面的面积中心F。
第三章保证船舶具有适度的稳性海上 货物运输
(二)初稳性的表示方法
初稳性方程: 初稳性的衡量标志 GM:初稳性高度(Initial metacentric height)
第三章保证船舶具有适度的稳性海上 货物运输
•(三)GM的计 算
1、KM
根据平均吃水或排水量查取静水力图表 KM=KB+BM
动稳性(Dynamical stability) 船舶倾斜过程中考虑角加速度和惯性矩
v 按船舶是否破舱进水
破舱稳性(Damaged stability) 完整稳性(Intact stability)
第三章保证船舶具有适度的稳性海上 货物运输
(三)船舶平衡状态 规定:与外力矩Mh反向时,MR>0
与外力矩Mh同向时,MR<0
•d
•L
•d
•AW
•z
z
•o
第三章保证船舶具有适度的稳性海上 货物运输
(3)KB的估算公式
马立许公式(Morrish’s approximate formula)
普通船型的相对误差在2.5%以内。 欧拉公式
普通船型的相对误差在1.5%以内。
第三章保证船舶具有适度的稳性海上 货物运输
•横稳心半径BM(r)的计算
M(Metacenter):船舶微倾前后两浮力 作用线的交点
基于GM(1,1)预测算法的民航飞机实时轨迹可视算法

基于GM(1,1)预测算法的民航飞机实时轨迹可视算法钱睿;乐俊;刘丹【摘要】针对民航飞机动态飞行可视化中滞后和跳跃问题,研究并提出了一种基于预测的民航飞机实时轨迹可视化算法.算法包括轨迹点预测,目标点行进和误差修正三部分.轨迹点预测基于GM(1,1)算法进行改进,在每次迭代时依据所有先验点和搜索方向动态调整发展系数.目标点行进基于预测坐标点提出TSUS(Time Slice Uniform Speed)算法,TSUS算法保证了在既定时间内目标确实移动到目的地,且能够根据初始速度方向调整轨迹弧度.误差修正采用分段式误差修正策略,以平衡不同情况下精确性和实用性.实验表明,提出的算法模型可用于民航飞机可视轨迹渲染中,且能获得良好的效果,提高系统的可用性和用户体验.%Aiming at the lagging and jumping problems in dynamic flight visualization of civil aircrafts, a real-time trajectory visualization algorithm for civil aircrafts based on prediction is studied and put forward. The algorithm includes three parts: track point prediction, target traveling and error correction. The track point prediction is improved based on GM(1, 1) algorithm. In each iteration, the development coefficients is dynamically adjusted according to all priori points and the search direction. The target traveling is based on the TSUS (Time Slice Uniform Speed) algorithm, which ensures that the target does indeed move to the destination within a period of time and adjusts the trajectory according to the initial direction. The error correction adopts the segmented error correction strategy to balance the accuracy and practicality of different situations. Experiments show that the algorithm canbe effectively applied to visual trajectory rendering of civil aircrafts and improve the usability and user experience of the system.【期刊名称】《计算机系统应用》【年(卷),期】2017(026)011【总页数】6页(P187-192)【关键词】可视化;GPS;运动预测;航空定位;轨迹追踪【作者】钱睿;乐俊;刘丹【作者单位】电子科技大学电子科学技术研究院,成都 611731;西南电子信息技术研究所,成都 610041;电子科技大学电子科学技术研究院,成都 611731【正文语种】中文航空运输业的发展使现代人的生活更加便利,而民航飞机作为航空运输的载体,在其中扮演者重要的角色.民航飞机传递位置信息,使相关人员了解飞机位置是保证航空安全的重要手段.为了更直观的表达位置信息,可视化界面应需而生.民航飞机传输定位信号主要依靠ADS-B(Automatic Dependent Surveillance-Broadcast,广播式自动相关监视)报文,其中包括了经度、纬度、高度、速度、航向、识别号等信息[1].通过自动周期性发送ADSB报文,监测站即可获取飞机相关信息.ADS-B报文中的飞机位置信息和运动信息是通过解析GPS、北斗等定位系统获取的[2].定位可视化技术应用在许多领域,由于web端先天的兼容性,使得其也成为定位数据可视化的重要载体[3].目前常见的方式有两种.第一种方式是通过接收到的目标位置信息,将目标在可视界面上对应点的位置进行更新,以达到显示目标位置的目的.此种方式能够准确反映目标位置信息,但存在两点不足.第一,目标轨迹不连续,观察者无法感受到目标移动过程,在下一定位信号获取之前,用户无法获知目标情况.第二,定位信号存在滞后性,在收到信号后才进行位置更新,如果目标持续移动,则可视界面中的位置会滞后于实际位置.目前,此种方式常用于现有的民航飞机定位可视化设备上.第二种方式是在第一种方式上的改进,它在收到位置信息后,将可视化界面的目标点移动到新的位置,提高了一定的用户体验,用户能够看到目标点的移动.但仍然没有解决根本问题,并且出现了不符合现实情况的轨迹,例如跨越了障碍,轨迹不平滑等问题[4].此种方式目前多用于地面移动目标定位的可视化系统中[5].目前,飞行相关数据可视化的研究大都是飞机本身的姿态方面[6].本文针对民航飞机轨迹可视化的需求,基于移动预测的方式,研究在二维场景下利用周期ADS-B报文进行飞机行进动画的渲染算法,提出了基于预测的民航飞机实时轨迹可视算法,使得可视化界面中飞机目标点移动更加精确和平滑,用户体验得到了提升.为实现民航飞机轨迹可视化,需要周期性获取飞机ADS-B报文.ADS-B报文中包括经度、纬度、高度、时间、南北方向速度,东西方向速度,垂直速度等信息.本文仅讨论二维空间中的可视化问题,且获取信号周期T固定,所以仅需要经度、纬度、东西方向速度、南北方向速度4个参数.三维空间的可视化问题可类比.飞机轨迹可视化的渲染可分为三个步骤进行,依次是:轨迹点预测、目标点行进和误差处理.1)轨迹点预测主要是用来先行预测下一坐标点,使得在未收到下一坐标点实际信号之前,飞机的可视化点可以先行移动,保证了可视化的连贯性.2)目标点行进则是当预测出下一坐标点时,飞机可视化点向前行进的策略,既要保证在时间间隔内移动到目标点,又要保证轨迹平滑达到良好的可视效果.3)因为预测是无法做到非常精确的,与实际坐标之间必然会存在误差,误差修正就是对此的一种修正,是提高精确度的关键步骤.而关于GPS信号传输和计算中产生的误差修正不在本文的讨论范围内,相关方法请参考文献[7].本文认为获得的GPS定位坐标即是可视化中需要展示的位置信息.本文提出的民航飞机轨迹可视化算法流程如图1.针对可视化需求而研究的飞行轨迹预测算法并不多见.但仍有一些轨迹预测算法被提出,如基于高斯混合模型的轨迹预测算法[8]等;也有采用已有滤波算法应用于空中飞行轨迹预测研究分析[9].这些算法普遍计算复杂度高,性能开销大,无法满足可视化系统的要求.本节针对此问题,基于 GM(1,1)预测算法[8]提出了一种预测模型.预测轨迹点采用基于灰色预测模型加以优化的预测模型.给定数据序列对给定的数据序列进行一次累加,序列为且满足微分方程:根据灰色系统生成理论,可将微分方程转换为其中,运用最小二乘法求出上式解,即可得到GM(1,1)灰色预测模型方程:其中,a为发展系数.根据灰色预测模型,可以求得的拟合值,然后进一步可以利用还原公式求得的拟合值: 即求得了原始序列的拟合值.在求解过程中,发展系数a与精度密切相关,工程中常常根据先验经验取一个固定值,通常情况下取值范围为时可用于中长期预测;时可用于短期预测.但全部预测过程采用统一发展系数,会使得在不同阶段预测准确度不同且偏差较大.本文针对实际场景动态设置a值,以提高预测精准度.b为背景中挖掘出的信息数据,通常是一个定值,由具体场景提供.GM(1,1)模型精度检验通常采用残差,后验差,关联度三种方式,本文将采用相对残差进行检验,并根据每次的检验结果调整发展系数a的取值.灰色模型中当k=1时模型必成立,且时,则模型方程组为超定方程组,采用最小二乘法求解系数a.而a的最佳化问题则转换为残差或残差百分比的最小化问题,即为下的有约束条件的非线性规划问题.约束条件采用航路信息的先验知识进行约束.航路是指由国家统一划定的具有一定宽度的空中通道.民航航班通常在航路内行驶,所以采用航道边缘为边界条件.在航路行进方向上给定边界值,使得最终预测点在边界范围内.由此需要确定搜索方向,在给定搜索方向上的预测值满足取值最优条件即可.记进行第k+1轮迭代时,其中tk是位移步长,与速度和时间有关.为搜索方向,得: 求得的极小值点和在航路边界处的边界值点,即可得到对应的与瞬时速度方向夹角为的方向.剩余的最小的值即为.由此我们得到了搜索方向Pk,带入Pk可以得到方程:解方程可得发展系数a.再由灰色预测模型方程,得到第k个点的一次累加预测值使用还原公式得到第k个点的预测值为保证行进过程及时且平滑,本文提出了TSUS算法,即时间片匀速行进算法.包括分量匀速率和速度匀转动方向两部分.行进是指从当前点运动到下一预测点的过程,其关键在于速度控制.本文速度采用垂向分量匀速,速度方向采用匀角速度向内偏转法,可以确保在时间间隔点目标平滑运动到下一点的位置.记第k点坐标为第k+1点的预测坐标为,记位移向 lk,有:则 pk到的直线距离为位移方向向量为目标在k点的瞬时速度为瞬时速度方向向量求出k点瞬时速度与位移向量的夹角满足:取适当单位时间t0,将定位信号的时钟周期T按t0分段,得到n段时间片,即:同时,将也做n等分,得到每个时间片内的位移距离和角度偏转量行进控制,使目标点按时间片依次行进,在每个时间片内的速度在位移方向上的分量为每个时间片内的速度向量与位移向量的夹角与前一个时间片相比变化为当位移方向角大于k点瞬时速度方向角时取+,否则取-.最终得到,目标在时间片ti内的运动状态方程:由于预测误差在预测模型中不可避免,所以对预测误差的修正策略也直接影响到可视化中信息准确度和平滑度.本文对误差修正的策略建立在可视化的实际应用场景上,即在以可视化界面中能够反映出定位和移动情况即可.依据以上条件,本文提出分段式误差处理策略.设目标点当前位置为收到的GPS信号坐标为第k-1点坐标为则时间周期内的实际位移距离dk为:1)若则认为在可视化中显示位置没有明显变化.此时目标图标不移动,但需要使用实际位置信息进行下一次预测.2)若则认为预测点与实际位置之间存在需要修正的误差.为保证轨迹平滑,将目标点位移到实际位置的过程纳入下一次行进过程的第一段时间片.由于误差较小,所以采用直线行进的方式,对观看者而言平滑度不会受到太大影响.3)若时,则认为误差太大,属于预测失误情况.此类情况一般在行进轨迹波动剧烈时会发生.此时准确性的需求大于动画的视觉平滑性,行进退化为直接跳转方式,即目标点直接跳转至实际位置.对速度方向的误差修正则容易许多,因为瞬时速度方向不会影响视觉平滑性,所以采用直接舍弃原始速度信息,采用GPS信号瞬时速度.根据中国民航局相关规定及《航空承运人例行航空器追踪监控实施指南》中的要求,自2016年12月1日起,我国民航全面实现客机全球追踪监控.所有我国民航客机在每15分钟或更短时间周期内,须通过现有机载设备自动向地面运行控制部门发送飞机所在经度、纬度、高度和位置信息,以确保地面实时掌握飞行中客机的准确位置.根据以上规定,中国航空公司航班均需在一段时间内自动向地面站提交位置及相关信息,这为自动获取数据绘制可视化界面提供了基础.从性能角度考虑,由于空管场景数据量非常大,同时在运行中的航班非常多,如果采样时间较短,将对服务器性能产生较大压力.但国内航班由于航程较短,采用上限的15分钟采集时长又不利于界面绘制.民航统计信息表明平均每天飞行航班架次约为10500架次,峰值时间空中同时约有3000余架飞机.所以本文采用5分钟时间周期,即队列数据处理时间平均 0.1s左右,符合实际应用.同时,结合实际数据样例进行试验.坐标采用某次航班平飞阶段中120分钟内的定位点数据,采集时间间隔为5分钟.航班坐标数据如表1所示.飞机的航向是指从所取基准线北端沿顺时针方向与飞机纵轴在水平面上的投影间的夹角.基准线取地球子午线得到的夹角称为真航向.本文描述飞机飞行速度方向采用真航向.真航向角度可以由经纬度坐标差值求得.即:使用以上数据进行实验验证.在第1点预测时由于没有足够的先验点,故采用直线行进.从第2点开始,预测结果如图2,和图3所示.针对预测结果,计算预测准确度.本文采用后验方差比进行检验.具体步骤和计算方法如下:1)依据前文提到残差和相对残差的计算公式,分别计算残差和相对残差.2)分别计算实际经纬度的均值和方差以及残差的均值和方差SE,有:3)计算后验方差比C:计算结果如表2所示.由实验结果和上述误差计算结果可知,本文提出的预测模型总体上能够较为准确的预测飞机坐标点位置,满足可视化对定位点预测的要求.但若坐标位置变化波动较大则会产生较大的误差.从结果上看,经度变化比较平稳,预测较为精确,而纬度在波动比较大的点明显存在误差,而误差较大的点会采用直接跳转策略消除误差,但会影响视觉平滑度.基于上述预测值,绘制目标点行进轨迹.依据本文提出的行进算法,取定位信号获取时间间隔,单位时间,绘制的移动轨迹如图4所示.由轨迹图看出,本文提出的可视化行进算法基本保证了视觉上的连续性,提升了用户体验.但由于采样间隔较长,导致在前后坐标点波动过大的位置预测失误,为修正较大误差产生了跳转轨迹尖角.但从可视化角度来看,在定位点处的坐标位置仍然较为精确,可以认为界面上的信息显示准确,而轨迹也比直接连接处的折线图更为形象.由此可以得出结论,本文提出的行进算法在可视化轨迹的绘制上具有实用性.本文基于民航飞机的航行特点,结合实际需求和条件,提出了一种基于民航飞机通信中定位数据的轨迹可视化渲染算法.该方法特点在于能够通过已有信息和航路等限定条件预测飞机走向,在传统GM(1,1)模型上依据预定条件提出了发展参数的非线性规划最优性解法.继而在轨迹构建上提出了简单且有效的行进算法.最终通过误差修正保证了正确性.这一算法模型经过实际数据的测试验证,证明了其能良好的作用于民航飞机轨迹的渲染,为提供民航可视化系统打下基础.目前本文提出的模型已经应用于民航飞行实时数据可视化系统的设计中,该系统基于地理效果图[10]展示飞机飞行轨迹及相关信息.系统验证,本文提出模型在飞机位置预测及可视化方面具有较好的效果.【相关文献】1 张鹏,刘意,段照斌.基于 BDS/GPS 的 ADS-B 信号源的研究.测控技术,2015,34(1):12–15,19.2 雷静.GPS/北斗定位解算算法的研究[硕士学位论文].哈尔滨:哈尔滨工程大学,2013.3 肖寒冰,方路平.一种 webGIS 数据可视化方法.计算机系统应用,2010,19(12):81–85.[doi:10.3969/j.issn.1003-3254.2010.12.016]4 石波,卢秀山,陈允芳.应用 EKF 平滑算法提高 GPS/INS 定位定姿精度.测绘科学技术学报,2012,29(5):334–338.5 计宏炜,沈亚强.一种可视化的定位系统设计.微型机与应用,2014,33(14):82–84,87.[doi:10.3969/j.issn.1674-7720.2014.14.026]6 李春香.飞行数据可视化技术研究.中国安全科学学报,2009,19(1):166–171.7 乔少杰,金琨,韩楠,等.一种基于高斯混合模型的轨迹预测算法.软件学报,2015,26(5):1048–1063.[doi:10.13328/ki.jos.004796]8 徐肖豪,杨国庆,刘建国.空管中飞行轨迹预测算法的比较研究.中国民航学院学报,2001,19(6):1–6.9 孔令云,沈鹃.灰色预测模型 (GM(1,1))预测精度浅析.公路交通科技,2008,25(9):346–349.10 赵庆展,张清,宁川.基于 OpenGL 的 DEM 地形可视化和虚拟漫游系统.计算机系统应用,2006,15(5):66–69.。
GT-120产品说明

I-gotU GT-120产品说明i-gotU GPS 旅行轨迹纪录器GT-120,适用于所有数码相机与照相手机。
旅行的意义不只是在于摄影,而是能共同欣赏与分享一段不同于平日生活的景致。
永久存放并做为未来的回忆,带着i-gotU旅行轨迹记录器,尽情补捉美好旅游足迹。
中国大陆市场销售价:399元人民币。
一、如何操作调整数码相机或照相手机的时间至正确的标准时间。
在户外打开i-gotU旅行记录器。
等待i-gotU旅行记录器自动卫星定位,找到目前所在位置。
带着i-gotU旅行记录器与数码相机或照相手机一同出游。
二、产品特色●造型轻巧并兼具智能省电功能的全球卫星定位(GPS)旅行记录器。
●利用GPS航点信息,自动标示出照片所在位置。
●兼容于所有数码相机与照相手机所产生出来的照片。
●以3D方式动态呈现旅游路径在Google地图或Google地球。
●支持主流浏览软件。
●支持内嵌及播放YouTube. Yam天空等线上影音档案。
●简单好用的软件I-gotU Desktop。
●创造属于自己的旅游记录并通过Email与您的亲友快乐分享。
●可直接输出含有地理资讯及照片的特殊档案(MHT或KMZ档)。
●支持上传相片至Picasa或Flickr网路相簿。
●多种携带方式,适用于户外使用。
●防泼水设计。
●通过USB介面可搭配多种市面上的导航软件作为GPS接收器使用。
(您只需要将装置连接至安装有导航软件的电脑等装置,即可当作卫星导航系统使用。
)●也适用于管理业务人员、出差人员或车队路径软件会自动整合轨迹记录与相片资讯于Google 地图或google地球。
显示出来的地图轨迹资料及相片可以输出为IE 浏览器可阅读的MHT文件显示路径或是输出为Google 地球可阅读的KMZ文件来显示路径,并直接附在EMAIL寄给亲朋好友分享!带着I-gotU,享有更多生活乐趣:多种不同的佩带方式:i-gotU范例:@trip - 3D View Demo ( Created by i-gotU ) :演示web页参见:/watch?v=fDkLOwwK2I4&fmt=18三、硬件规格▪内置 SiRF StarIII 低功率芯片▪内置 GPS 天线▪GPS接收方式: 20个频道完整检视追踪▪尺寸:44.5 x 28.5 x 13 mm▪重量:20g▪可预设记录间隔:1秒~ 60 分钟▪内置闪存,最多可记录65,000个航点,若记录间隔设为15秒/点,每天记录8小时,共有约30天的记忆量▪内置 230mAh 可充式锂电池(若记录间隔设为15秒/点,最多可连续使用约20小时)▪平均冷开机时间:小于35秒,平均暖开机时间:小于1秒▪红.蓝两色LED指示灯▪计算机连接接口: USB 1.1▪操作温度:摄氏零下十度至摄氏五十度四、系统需求▪Windows 2000, Windows XP, Windows Vista ▪USB 1.1 或 2.0 接口I-gotU GT-200产品介绍i-gotU GPS 旅行轨迹纪录器GT-200,适用于所有数码相机与照相手机。
船舶静力学作业

b=1.5m,l1=2m,l2=1.5m,b1=1.2m,b2=1.5m。求:该水线面面积 Aw 及形心坐标 XB、YB, 。
2-3
某船水线长 L=100m,在正浮状态时,各站号的横剖面面积如下表所列: 6 54.3 7 44.7 8 30.1 9 13.5 10 0
0 1 2 3 4 5 站号 横剖面面 0 13.3 30.4 44.4 53.8 57.3 积 (1)以适当比例画出该船的横剖面面积曲线; 浮心纵向坐标 XB; (3)求纵向棱形系数 Cp。 2-4
z 4 3 2 1 0 2.24 1.00 1.00 1.00 1.00 2.00 1.60 1.20 z 6.00 4 3 2 1 y 0 5.16 4.10 2.25
1.00 1.00 1.00 1.00 y
1-12
某船的水线面曲线在各站号处的半宽值如下表所列(站距为 12m) 站号 0 0 1 2 3 4 5 6 7 8 9 10 0 6.35 8.55 8.67 8.67 8.47 8.67 8.60 7.55 4.18
(2)用梯形法和辛氏第一法按表格计算排水体积 ∇ ,用梯形法和辛氏第一法按表格计算
某海船中横剖面是长方形。各水线长均为 128m,最大宽度为 15.2m,每隔 1.22m 自
上而下各水线面面积系数是;0.80,0.78,0.72,0.62,0.24 和 0.04。试列表计算: (1)各水线的每厘米吃水吨数; (2)最高水线下的排水量和浮心垂向坐标; (3)自上而下第二水线下的排水量和浮心垂向坐标; (4)最高水线下的方形系数; (5)最高水线下的棱形系数。 2-5 某 船 长为 60m , 其 水 线 下 横剖 面为 半 圆 形 ( 其 形 心 里 向 的 位 置 距 基线高 为
HOLUX 洛基山 GM132快速使用指南(2014年6月)

导航地图
有,全国近3000个县级及以上城市详图,可智能沿路导航
6
3.洛基山GM-132主要功能使用说明
3.1 查看卫星定位情况
开机后的主界面中,通过查 看屏幕左上角的信号图标即 可知道是否已经完成卫星定 位。 左图:已经定位 右图:尚未定位 点击此图标可进入卫星信号 及坐标查看界面(转下页)。
7
3.洛基山GM-132主要功能使用说明
2
1. 品牌故事——台湾长天科技股份有限公司
HOLUX(长天科技股份有限公司),世界知名电子厂商,是一家专业的卫星定位 (GPS)产品制造厂。1994年成立于有台湾硅谷之称的新竹科技园,以研发、产 销全球卫星定位器及高频产品为主,为台湾最早进行GPS产品研发生产的高科技 企业之一,高质量及多功能为长天开发产品不变的原则。长天是台湾证券交易 所上市公司,股票代码3431。目前产品包括掌上型GPS、GPS接收器及GPS模块, 长天的研发团队将持续深入于这个领域,产品并将结合声音、影像及无线传输 等功能。长天的目标是:提供人类方便而实用的生活用品。更希望世界上的每 一个人,都能分享我们科技上的成就,享受人生。
13
3.洛基山GM-132主要功能使用说明
3.5 航行资讯
GM-132 开 机 后 , 在 主 界面中短按(按下不超 过1秒钟即放开)左键 一次可进入航行资讯页
面,其中提供了丰富的 航行信息供您参考,如 当前航向、海拔高度、 速度、轨迹时间、轨迹 距离、电子罗盘、气压 高度、电池电量及当前 时间等(部分信息需 GPS完成定位或开启 轨 迹记录)。
有
距离间隔记录方式
有
自动/手动 记录方式可选
有
单条轨迹连续记录时间
8小时
大地坐标系统
卡西欧ga140gm说明书

卡西欧ga140gm说明书篇一:卡西欧 ga140gm 手表是一款功能强大的计算器手表,具有许多先进的功能,例如四则运算、小数点运算、单位换算、时间显示、闹钟、定时器、计算器等。
以下是卡西欧 ga140gm 手表的说明书:一、手表外观1. 手表表盘:表盘尺寸为 36mm,采用不锈钢材质,具有 4 个刻度盘和 2 个指针。
2. 手表表带:表带采用不锈钢材质,可更换,有多种颜色可供选择。
3. 手表镜面:手表采用防刮玻璃镜面,能够有效防止磨损。
二、手表功能1. 四则运算:手表可以进行基本的四则运算,例如加、减、乘、除等。
2. 小数点运算:手表可以进行小数点运算,例如点乘、点加等。
3. 单位换算:手表可以转换多种单位,例如英尺、英里、厘米、米等。
4. 闹钟:手表可以设置多个闹钟,提醒按时起床。
5. 定时器:手表可以设置定时器,提醒自己在特定时间做什么事情。
6. 计算器:手表可以作为计算器使用,方便进行复杂的计算。
三、手表操作1. 手表开机:按下手表左侧的开机键,手表即可开机。
2. 手表关机:按下手表左侧的关机键,手表即可关机。
3. 手表设置:按下手表右侧的设置键,可以进行各种设置,例如时间设置、闹钟设置、单位设置等。
4. 手表操作:手表的各种功能可以通过按手表上的按钮进行操作,例如按手表左侧的加减键可以进行四则运算,按手表右侧的设置键可以进行设置操作。
四、手表维护1. 手表保养:手表需要定期保养,防止手表零件老化、磨损。
2. 手表清洁:手表需要定期清洁,防止手表镜面、表带脏污。
以上是卡西欧 ga140gm 手表的说明书,如果手表遇到问题,可以联系卡西欧官方客服或前往卡西欧授权的维修中心进行维修。
篇二:卡西欧 ga140gm 手表是一款功能强大的计时器,拥有多种功能和设置,可以让用户体验到高品质的计时服务。
以下是卡西欧 ga140gm 手表的说明书,让用户了解手表的各个方面。
1. 手表外观卡西欧 ga140gm 手表的外观简洁大方,采用坚固的金属材质制成,表壳、表带和指针都经过精心打磨和抛光处理,尽显高品质和精湛工艺。
利用航迹求面积操作过程

利用航迹求面积操作过程进入GPS面积测量仪的设置页面,用方向键将光标移到坐标,再用方向键将光标移到坐标格式下面方框,按输入键弹出小菜单,再用方向键将光标移到UserUTMGrid,按输入键弹出自定义坐标格式,将光标移至中央经线下面方框按输入键,光标打在第1个字母上,用方向键上下按动将字母改为E。
用方向键将光标向右一位位移动,用方向键上下按动,将数字一位位的设置为117°00.000′按输入键,中央经线下面方格显示117°00.000′,用方向键将光标移到投影比例下面方格,用同样的办法将投影比例设置为+1.0000000,将东西偏移设置为+500000.0m,南北偏移设置为0.0m。
将光标移至存储按输入键,坐标格式下面方格中显示UserUTMGrid。
用方向键将光标移到坐标系统下面方格,按输入键→方向键选定User→输入键,将默认的WGS84坐标系统改为User。
然后用上述方法将坐标系统中DX、DY、DZ、DA、DF5个参数分别设置为+37.0m、-80.0m、-64.0m、-108.0m、+0.00000050(不同的地域范围5个参数也不尽相同,这5个参数适合河南省濮阳地区范围内使用)。
注意在前4个参数输入时,要首先用方向键将光标移到最右边,直到听到连续2声嘟嘟响,然后开始输入参数的小数点后的一位数,然后将光标向左移一位,这时再输入小数点前一位数的个位数,小数点不用输入,再向左移一位光标,输入十位数,再向左移一位光标,输入百位数,最后把光标移到最左边输入+或-。
5个参数输入完成后,将光标移到存储上按输入键,光标打在坐标系统下面方格中User上。
用方向键将光标移到北基准下面方格中,按输入键弹出小菜单,再用方向键将光标移到网格北按输入键,北基准下面方格显示网格北。
使用摄像机跟踪制作平面合成

使用摄像机跟踪制作平面合成摄像机跟踪是Blender中一个强大的功能,它可以帮助我们在3D场景中添加真实的相机移动效果。
在本教程中,我们将介绍如何使用摄像机跟踪来制作平面合成效果。
首先,打开Blender软件并创建一个新的场景。
在默认的“Layout”布局中,右侧的“Properties”窗格中选择“Scene”选项卡,找到“Units”部分并将其设置为“Metric”。
这将确保我们在摄像机设置中使用的尺寸单位与现实世界中的相似。
接下来,点击屏幕底部的“Layout”按钮,选择“Motion Tracking”布局。
这将为我们提供一个专门用于摄像机跟踪的界面。
在Motion Tracking界面中,我们需要将视频导入到Blender中,以便进行跟踪。
点击界面左侧的“Movie Clip Editor”选项卡,然后点击“Open”按钮来导入视频文件。
选择您要使用的视频文件并打开它。
导入视频后,在视频序列上右键单击并选择“Set as Background”选项。
这将在下方的视图窗口中显示视频序列作为背景。
现在,点击右侧的“3D View”选项卡,将窗口布局切换回三维视图。
在3D视图中,我们需要创建一个跟踪点来进行摄像机跟踪。
点击顶部工具栏的“Add”按钮,并选择“Tracking”>“Track”来创建一个新的跟踪点。
在视频序列中选取一个明显的特征点,并在3D视图中点击该点进行跟踪。
Blender会自动为该点创建一个跟踪标记。
接下来,我们需要告诉Blender摄像机跟踪点的具体位置。
点击界面右侧的“Graph Editor”选项卡,并选择“View”>“Marker”来查看跟踪标记的属性。
在“Marker”属性中,我们可以看到跟踪标记在不同帧之间的位置和缩放信息。
在当前位置上,点击一次“Insert Keyframe”按钮来添加关键帧。
现在,我们需要将此跟踪点与3D场景中的实际物体相对应。
苹果ipad平板怎么测距离?ipad测量尺寸算面积的方法

苹果ipad平板怎么测距离?ipad测量尺⼨算⾯积的⽅法苹果ipad平板可以测距离,该怎么测量呢?下⾯我们就来看看详细的教程。
1、我们在苹果iPad桌⾯上打开测量仪
2、进⼊到苹果iPad测量仪窗⼝,屏幕将会弹出⼀个动画,演⽰如何测量物体长度
3、我们将苹果iPad的摄像头对着我们要测量的物体,注意光圈必须对准我们想要测量物件的某个起始点,然后点击屏幕上⽅的加号+
4、如下图所⽰,我们的苹果iPad将⾃动测量出我们物件的长宽,以及计算出该物件的⾯积⼤⼩
5、如果我们想要测量某个物件的长度,同样⽅法,将光圈对准物件起始点,点击+
6、然后苹果iPad沿着该物件的边移动,测量仪将会实时测出光标所在位置的长度
7、当光标达到物件的终点时候,点击屏幕上⽅的加号+
8、如下图所⽰,我们就能准确量出当前物件的具体长度了
以上就是ipad测量尺⼨算⾯积的⽅法,希望⼤家喜欢,请继续关注。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
GM120如何使用轨迹功能并计算面积
在轨迹记录菜单中,您可以调整轨迹记录设定、更改轨迹记录模式并查看轨迹记录信息。
GM-120具有轨迹记录并根据轨迹计算面积的功能,最多可保存8条轨迹,每条最多2500个航迹点。
建立轨迹记录并查看面积的一般步骤:设置轨迹记录参数—记录轨迹—查看轨迹信息(长度、面积),详细
如下(需在GM120已经成功定位的情况下进行操作,如何查看定位情况见备注第1条):
设置轨迹记录参数:
1.在GM120的专家模式下,按下菜单键显示菜单选项。
2.选择“轨迹”选项,按确认键。
3.在“轨迹”标签页下(本说明书右上角大图),使用方向键选中(字体白色、背景黑色为选中)“目
前轨迹”字段,按确认键显示下拉菜单,按向下键将“关”改选为“单笔记满”后按确认键确定该
选项。
4.此时,按向右的方向键进入“模式”标签,按下列步骤将轨迹记录方式改为按时间间隔记录:
●选择“按时间记录”,然后按确认键查看下拉菜单选项。
使用方向键选择轨迹点记录的间隔时
间(一般选择“每隔5秒钟”)。
●“按距离记录”选项如为“----”,则不用更改,否则将其更改为“----”,即不按距离记录。
5.完成以上“模式”选项设置后使用向下的方向键选中屏幕右下角的“√”按钮,按确认键保存设置。
记录轨迹:
6.此时,机器已经在记录轨迹了,您可以沿着要测量面积的地物边界走一个闭合图形,记住出发点的
大概位置,走回到该位置时按第4步操作进入“轨迹”标签页,将“目前轨迹”选项设定为“关”。
7.在“轨迹”标签页面中(本说明书右上角大图)按下菜单键弹出6项下拉菜单,选择下列选项:
●选择第2项——“储存目前轨迹”将缓存中的轨迹点保存到机器内存中并生成一个轨迹文件。
●本机最多可存储8条轨迹,被选中轨迹的周围会有虚线框围绕,如只有只有一个轨迹文件,则
其默认被选中,可参考本说明书右上角大图。
查看轨迹信息(长度、面积):
8.按向右的方向键两次或者向左的方向键一次进入“信息”标签页,查看当前被选中的轨迹的距离和
面积等信息。
备注:
⑴查看定位状态:按菜单键两次选择“卫星画面”,该屏幕下方如显示“捕捉卫星中…”则未定位,显
示经纬度信息则说明已成功定位。
⑵关于轨迹记录模式选项:
选择“单笔记满”模式。
您可以连续不断记录一条最多包含2500个点的轨迹,当记满2500个点时,将
提示保存或清除轨迹记录。
您也可以在记录过程中随时做出保存或清除轨迹的操作。
完成保存或清除操
作后,如仍选择“单笔记满”模式,将会从0开始记录新轨迹。
如切换为“关”将会停止记录。
⑶如果您同时为“间隔距离”和“间隔时间”设定数值,其中任何一个间隔值达到时将自动记录轨迹点。
⑷要确保轨迹记录不丢失,请在电量不足前及时存储轨迹记录。
⑸在“单笔记满”或“单笔复写”方式下记录轨迹,保存记录时,轨迹默认显示方式为“关”,即在地图上不显示这条轨迹;在“多笔连续”方式下记录轨迹,保存记录时,轨迹默认显示方式为“开”,即在地图上显示这条轨迹。