LED数码管驱动显示实验
LED显示程序设计实验

实验二LED数码管驱动显示程序实验一、实验目的1、初步学习和了解VHDL语言编程方式2、学习和掌握七段数码显示译码器的设计方法3、学习和掌握VHDL的多层设计方法二、实验要求1、根据硬件设计的思维方式,编制LED七段码的显示程序2、要求是一位LED以定位方式显示3、完成LED七段码波形分析的显示功能4、在EDA实验箱上按要求显示三、实验设备1、计算机一台2、EDA——Ⅳ实验箱一台四、实验原理1、七段码是用一种纯组合的逻辑电路,通常是用小型专用的IC门电路组成,数字输入与输出表达均未16进制,处理一般较复杂,而用FPGA/CPLD来实现较为简单。
2、七段码输入与输出的原理与真值表关系。
(a)输入:七段码输入为四个输入信号,用来表示为“0000”到“1111”,即表示为十六进制的“0”到“F”。
(b)输出:七段码输出为七个输出信号,分别用“A、B、C、D、E、F、G”七个符号来表示。
一般规定,输出信号为“1”时,它所控制的发光二极管为点亮状态,输出信号为“0”时,它所控制的发光二极管为熄灭状。
本实验使用的七段数码管为共阴极组,其电路如图2.1所示。
图2.1 共阴极数码管及其电路(c)输入与输关系为四位二进制代码组成十六进制代码,将其代码显示,其对应关系如表2.1所示。
(d)显示方式是通过选位的方式进行,是将FPGA/CPLD的三位二进制的信号输出,通过外部三——八译码器硬件电路,选中一路LED信号为输出,故选择一位LED数码管显示,本实验是采取选相应的一个指定位置进行LED显示。
3、输入是通过外部的四个按键操作而组成一位十六进制。
其连接到FPGA/CPLD的对应的引脚上,需进行引脚分配。
4、编写译码程序,生成底层组件,组合成底层文件。
表2-1 七段字符显示真值表五、实验步骤1、 在D 盘建立自己的文件目录,D: \ EX \ Z04** \ you*\ex*;2、 在Max+Pluse Ⅱ的界面下,自己的文件目录下,建立项目文件 File \ Project \ 文件名A ;3、 在自己的文件目录下,建立文本文件 File \ New \ 文件名B.vhd ;4、 保存此文件并划归到项目文件内, File \ Project \ Set Project current File ,其中文本文件名B 必须和实体名一致;5、 输入程序,保存文件“文件名B.vhd ”,File \ Save As “文件名B.vhd ”(注意后缀,如保存默认文件名时,其后缀通常为“*.tdf ”文件,必须删除后缀为“*.tdf ”文件名;6、 单击编译器快捷方式按钮,对文本文件进行编译,观察是否有原则错误;7、 如有修改则修改程序中错误,若无错误则可做以下工作; 8、 建立底层器件的封装,File \ Create Default Symbol ;9、 建立图形文件,File \ New \ 文件名C.gdf 并化归到项目内。
数码管的显示的实验报告
数码管的显示的实验报告数码管的显示的实验报告引言:数码管是一种常见的数字显示装置,广泛应用于各种电子设备中。
本实验旨在通过实际操作,了解数码管的原理和工作方式,并通过一系列实验验证其显示效果和功能。
实验一:数码管的基本原理数码管是由多个发光二极管(LED)组成的,每个发光二极管代表一个数字或符号。
通过对不同的发光二极管进行点亮或熄灭,可以显示出不同的数字或符号。
本实验使用的是共阳数码管,即共阳极连接在一起,而阴极分别连接到控制芯片的输出引脚。
实验二:数码管的驱动电路为了控制数码管的显示,需要使用驱动电路。
常见的驱动电路有共阴极驱动和共阳极驱动两种。
本实验使用的是共阳极驱动电路。
驱动电路由控制芯片、电阻和电容组成。
控制芯片通过控制输出引脚的高低电平来控制数码管的点亮和熄灭。
实验三:数码管的显示效果通过控制芯片的输出引脚,可以实现数码管的显示效果。
本实验使用的是四位数码管,可以显示0-9的数字。
通过改变控制芯片输出引脚的电平,可以控制数码管显示不同的数字。
实验中通过编写程序,使数码管显示从0到9的数字循环显示,并通过按键控制数字的增加和减少。
实验四:数码管的多位显示除了显示单个数字外,数码管还可以实现多位显示。
通过控制不同位数的数码管,可以显示更多的数字或符号。
本实验使用的是四位数码管,可以同时显示四个数字。
通过编写程序,可以实现四位数码管的多位显示,例如显示当前时间、温度等信息。
实验五:数码管的亮度调节数码管的亮度可以通过改变驱动电路中的电阻值来实现。
本实验通过改变电阻值,调节数码管的亮度。
实验中通过编写程序,通过按键控制数码管的亮度增加和减少,从而实现亮度的调节。
结论:通过本次实验,我们深入了解了数码管的原理和工作方式。
数码管可以通过驱动电路的控制,实现数字和符号的显示。
同时,数码管还可以实现多位显示和亮度调节。
数码管作为一种常见的数字显示装置,具有广泛的应用前景,可以应用于各种电子设备中。
通过进一步的研究和实践,我们可以更好地利用数码管的功能,满足不同应用场景的需求。
led数码管实验报告

led数码管实验报告
LED数码管实验报告
实验目的:通过LED数码管实验,掌握数字电路的基本原理和数字显示技术。
实验原理:LED数码管是一种数字显示装置,由多个LED灯组成,可以显示0-
9的数字。
在数字电路中,LED数码管通常用于显示数字信号,通过控制LED
的亮灭来显示不同的数字。
实验材料:LED数码管、数字电路实验板、数字信号发生器、数字电路元件等。
实验步骤:
1. 将LED数码管连接到数字电路实验板上,并接入电源。
2. 使用数字信号发生器产生不同的数字信号,将信号输入到LED数码管中。
3. 观察LED数码管的显示效果,记录不同数字信号对应的LED亮灭状态。
4. 分析LED数码管的工作原理,探讨数字信号与LED数码管的对应关系。
实验结果:通过实验观察和记录,得出了不同数字信号与LED数码管显示的对
应关系,掌握了LED数码管的工作原理和数字信号的显示技术。
实验结论:LED数码管是一种常用的数字显示装置,广泛应用于计时器、计数器、电子钟等领域。
通过本次实验,我们深入了解了LED数码管的工作原理,
掌握了数字信号与LED数码管的对应关系,为今后的数字电路设计和应用打下
了基础。
总结:LED数码管实验是数字电路实验的重要内容,通过实验学习,可以加深
对数字电路原理的理解,提高数字显示技术的应用能力。
希望同学们能够认真
学习实验内容,掌握实验技能,为将来的工程实践奠定坚实基础。
LED数码管显示实验

《微机实验》报告实验名称 LED数码管显示实验指导教师专业班级姓名学号序号联系方式一、任务要求基本要求:利用末位数码管循环显示数字0-9,显示切换频率为1Hz。
提高要求:在4位数码管显示器上依次显示当天日期和时间,显示格式如下:yyyy (年份)mm.dd(月份.日)hh.mm(小时.分钟)相关输出接口和控制接口如下:二、设计思路1.基本部分设计思路:首先依次计算得出共阴极LED数码管对应0~9的段码数据,依次分别为:FCH,60H,DAH,F2H,66H,B6H,BEH,E0H,FEH,F6H;并将上述段码以字符的形式分别存于存储区域的50H~59H。
以备取用。
然后以1HZ的频率分别将上述段码分别依次循环输出至P1端口,每次输出时均使P0.7和P0.6均为低电平,即选择末位数码管显示相应数据:使用计数器T0,并选择定时方式1,即16位定时器,由初始化代码可知指令周期为16us,计算可得计数器初值为0BDCH时(即TH0为0BH,TL0为DCH),计时时间即为1s。
每次计时1s时,使用查表指令MOVC A,@A+DPTR从段码存储区域依次取出段码数据,并输出给P1端口,同时选择末位数码管进行显示。
每次查表输出持续1s后,对存储地址R0进行加一操作,然后循环查表取下一个相应段码数据。
直到R0=59H时,最后一个段码已取出并输出,重新赋值R0←50H,然后从第一个段码开始查表取出数据,再依次查表取出段码数据并选择末位数码管输出,如此无限循环下去。
2.提高部分设计思路:首先依次计算得出共阴极LED数码管对应“2012”“11.07”“23.45”的段码数据,且由于每次输出时从末位开始刷新,需要按“2→1→0→2”“7→0→1.→1”“5→4→3.→2”的顺序输出给P1端口,其段码数据分别为:DAH,60H,FCH,DAH,E0H,FCH,61H,60H,B6H,66H,F3H,DAH;并将上述段码以字符的形式分别存于存储区域的50H~5BH。
实验四 LED数码管显示实验报告
实验名称 LED数码管显示实验指导教师曹丹华专业班级光电1202班姓名陈敬人学号联系电话一、任务要求实验目的:理解LED七段数码管的显示控制原理,掌握数码管与MCU的接口技术,能够编写数码管显示驱动程序;熟悉接口程序调试方法。
实验内容:1.基础部分:利用C8051F310单片机控制数码管显示器。
利用末位数码管循环显示数字0-F,显示切换频率为1Hz。
2.提高部分:在数码管上显示0→199计数,计数间隔为0.5秒。
二、设计思路1.基础部分C8051F310单片机片上晶振为24.5MHz,采用8分频后为3.0625MHz ,输入时钟信号为48个机器周期,T1采用定时器工作方式1,单次定时最长可达1.027s,可以实现1s定时要求。
定时采用软件查询工作方式,利用JNB TF0, HERE实现。
置P0.6和P0.7端口为0,位选信号选定末位数码管。
通过MOVC A, @A+DPTR指令,利用顺序查表法取出显示段码数据。
寄存器R0自增1,并赋给A以取出下一个显示段码数据。
为减短代码长度,利用CJNE指令实现循环结构。
当寄存器R0增至0FH后,跳转至开头,重新开始下一轮显示。
2.提高部分定时方式及查表方式同基础部分,由于要实现三个数码管同时显示,因此采用动态扫描显示法。
三、资源分配1.基础部分P0.6: 位选信号端口P0.7:位选信号端口P1:输出段码数据R0:存放显示数据DPTR:指向段码数据表首 2.提高部分P0.6:位选信号端口P0.7:位选信号端口R0:存放个位显示数据 R5:存放十位显示数据 R6:存放百位显示数据 P1:输出段码数据DPTR: 指向段码数据表首四、流程图1.基础部分2.提高部分五、源代码(含文件头说明、语句行注释)1.基础部分;******************基础部分源代码***************************;Filename: test.asm;Decription: 末位数码管循环显示数字0-F,显示切换频率为1Hz。
led数码管显示控制实验报告
led数码管显示控制实验报告篇一:单片机实验报告——LED数码管显示实验《微机实验》报告LED数码管显示实验指导教师:专业班级:姓名:学号:联系方式:一、任务要求实验目的:理解LED七段数码管的显示控制原理,掌握数码管与MCU的接口技术,能够编写数码管显示驱动程序;熟悉接口程序调试方法。
实验内容:利用C8051F310单片机控制数码管显示器基本要求:利用末位数码管循环显示数字0-9,显示切换频率为1Hz。
提高要求:在4位数码管显示器上依次显示当天时期和时间,显示格式如下:yyyy(月份.日)(小时.分钟)思考题:数码管采用动态驱动方式时刷新频率应如何选择?为什么?二、设计思路C8051F310单片机片上晶振为,采用8分频后为,输入时钟信号采用48个机器周期。
0到9对应的断码为:FCH、60H、DAH、F2H、66H、B6H、BEH、E0H、FEH、F6H 基础部分:由于只需要用末位数码管显示,不需要改变位码,所以只需要采用LED的静态显示。
采用查表的方法,通过循环结构,每次循环查找数据表下一地址,循环十次后重新开始循环。
每次循环延时1s,采用定时器0定时方式1。
提高部分:四个数码管都要显示,所以采用LED的动态显示。
由于数码管的位选由、控制,P0端口的其他引脚都没用到,所以对P0端口初始化赋00H,每次循环加40H、选中下一位,四次后十六进制溢出,P0端口变又为00H回到第一个数码管。
每位数码管显示一个段码后都延时1ms(否则数码管太亮,刺眼)采用定时器0定时方式1,依然采用查表法改变段码值。
通过循环:DJNZ R5,BACKMOVR5,#250 DJNZ R4,BACK MOVR4,#8来控制每种模式的切换时间,我采用2s切换一次(8*250*1ms=2s)。
切换模式,可以采用改变查表法的偏移量来实现,没切换一次模式,偏移量加04H,三次后回到初始偏移量,来实现三种模式的循环显示。
三、资源分配基础部分:、:控制数码管的位选P1:控制数码管段码的显示R0:控制段选提高部分:、:控制数码管的位选P1:控制数码管段码的显示R0:控制位选R1:控制段选R3:用于改变偏移量来切换模式R4、R5:控制循环次数,控制模式切换时间四、流程图基础部分:提高部分篇二:实验八数码管LED实验报告苏州大学实验报告院、系年级专业姓名学号课程名称成绩指导教师同组实验者实验日期实验名称:数码管LED实验一.实验目的理解8段数码管的基本原理,理解8段数码管的显示和编程方法,理解4连排共阴极8段数码管LG5641AH与MCU 的接线图。
数字显示器实验报告

一、实验目的1. 了解数字显示器的基本原理和分类。
2. 掌握数字显示器的设计方法和应用。
3. 学会使用数码管和LCD显示器进行数字显示。
4. 提高动手实践能力和问题解决能力。
二、实验内容1. 数码管显示实验2. LCD显示器显示实验三、实验原理1. 数码管显示原理:数码管是一种半导体发光器件,由若干个发光二极管(LED)组成,每个LED代表一个数码管的笔画。
通过控制LED的亮灭,可以显示不同的数字和字符。
2. LCD显示器显示原理:LCD显示器是一种液晶显示器,通过液晶分子的旋转控制光的透过与阻挡,实现图像的显示。
LCD显示器主要由液晶面板、背光源、偏振片、驱动电路等组成。
四、实验步骤1. 数码管显示实验(1)搭建电路:将数码管与AT89C51单片机连接,连接方式包括共阴极和共阳极两种。
(2)编写程序:使用C语言编写程序,实现数码管显示数字和字符。
(3)调试程序:使用Keil软件对程序进行编译和调试,观察数码管显示效果。
2. LCD显示器显示实验(1)搭建电路:将LCD显示器与AT89C51单片机连接,连接方式包括并行和串行两种。
(2)编写程序:使用C语言编写程序,实现LCD显示器显示数字和字符。
(3)调试程序:使用Keil软件对程序进行编译和调试,观察LCD显示器显示效果。
五、实验结果与分析1. 数码管显示实验结果:通过编写程序,数码管能够显示数字和字符,实现了实验目的。
2. LCD显示器显示实验结果:通过编写程序,LCD显示器能够显示数字和字符,实现了实验目的。
3. 分析:(1)数码管显示实验:在实验过程中,发现数码管的共阴极和共阳极连接方式不同,需要根据实际连接方式编写程序。
此外,为了提高显示效果,需要对数码管进行动态扫描显示。
(2)LCD显示器显示实验:在实验过程中,发现LCD显示器的并行和串行连接方式不同,需要根据实际连接方式编写程序。
此外,为了提高显示效果,需要对LCD显示器进行初始化和设置显示模式。
led数码管显示控制实验报告

led数码管显示控制实验报告实验名称:LED数码管显示控制实验实验目的:1.了解LED数码管及其工作原理。
2.学习如何控制LED数码管显示数字。
3.加强对单片机控制IO口的编程能力。
实验器材:1.STC89C52RC单片机开发板2.数码管(共阳、共阴)3.杜邦线实验原理:LED数码管是一种数字显示组件,在工业控制、计算机等领域都有广泛应用。
LED数码管在显示数字时,通过LED管来显示数字,根据不同的管脚状态,控制LED管的导通和隔离,间隔时间来控制亮和灭的时间,从而显示出不同的数字。
在STC89C52RC单片机上,通过控制IO的高低电平来控制数码管的显示。
当要显示的数字为0~9时,需要将相应的IO输出低电平,同时将其他IO输出高电平,从而实现数字的显示。
实验步骤:1.将共阳数码管的正极连接到P0口(注意极性),并将共阴数码管的负极连接到P0口(注意极性)。
2.将STC89C52RC单片机开发板连接到电源,将USB转串口线连接到电脑。
3.打开Keil uVision5软件,创建一个新工程,配置完工程后编写控制代码(具体代码见附录)。
4.编写完成后,将代码下载到单片机中,开始实验。
实验结果:成功实现了数字0到9的显示。
通过实验,我们了解了LED数码管的工作原理,学会了控制单片机IO口进行数字的显示,加强了对单片机编程的掌握能力。
附录:代码如下:```#include <reg52.h>#define uchar unsigned char#define uint unsigned intsbit dula = P2^6;sbit wela = P2^7;uchar code table[] = {0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f};void delay(uint z){uint x,y;for(x=z;x>0;x--)for(y=114;y>0;y--);}void Display(){uchar i;for(i=0;i<10;i++){P0 = table[i]; dula = 0;dula = 1;delay(500);}}。
电子设计自动化(EDA)_数字时钟程序模块(LED数码管显示)_实验报告
电子设计自动化(EDA)—数字时钟LED数码管显示二、实验内容和实验目的1. 6个数码管动态扫描显示驱动2. 按键模式选择(时\分\秒)与闹钟(时\分)调整控制,3. 用硬件描述语言(或混合原理图)设计时、分、秒计数器模块、闹钟模块、按键控制状态机模块、动态扫描显示驱动模块、顶层模块。
要求使用实验箱左下角的6个动态数码管(DS6 A~DS1A)显示时、分、秒;要求模式按键和调整按键信号都取自经过防抖处理后的按键跳线插孔。
实验目的: 1)学会看硬件原理图, 2)掌握FPGA硬件开发的基本技能3)培养EDA综合分析、综合设计的能力三、实验步骤、实现方法(或设计思想)及实验结果主要设备: 1)PC机, 2)硬件实验箱, 3)Quartus II软件开发平台。
1.打开Quartus II , 连接实验箱上的相关硬件资源, 如下图1所示。
2.建立新文件, 选择文本类型或原理图类型。
3. 编写程序。
4.编译5. 仿真, 加载程序到芯片, 观察硬件输出结果(数码管显示)6.结果正确则完成。
若结果不正确, 则修改程序, 再编译, 直到正确。
模24计数器模块LIBRARY IEEE;USE IEEE.STD_LOGIC_1164.ALL;USE IEEE.STD_LOGIC_UNSIGNED.ALL;USE IEEE.STD_LOGIC_ARITH.ALL;ENTITY count24 ISPORT(clk,en:IN STD_LOGIC;cout:OUT STD_LOGIC;hh,hl:OUT STD_LOGIC_VECTOR(3 DOWNTO 0));END count24;ARCHITECTURE arc OF count24 ISSIGNAL a,b:STD_LOGIC_VECTOR(3 DOWNTO 0);BEGINPROCESS(clk,en)BEGINhh<=a;hl<=b;IF(clk'EVENT AND clk='1') THENIF(en='1') THENIF(a="0010" AND b="0011") THENa<="0000";b<="0000";ELSE IF(b="1001") THENa<=a+'1';b<="0000";ELSE b<=b+'1';END IF;END IF;IF(a="0010" AND b="0010") THENcout<='1';ELSE cout<='0';END IF;END IF;END IF;END PROCESS;END arc;模60计数器模块LIBRARY IEEE;USE IEEE.STD_LOGIC_1164.ALL;USE IEEE.STD_LOGIC_UNSIGNED.ALL;USE IEEE.STD_LOGIC_ARITH.ALL;ENTITY count60 ISPORT(clk,en:IN STD_LOGIC;cout:OUT STD_LOGIC;hh,hl:OUT STD_LOGIC_VECTOR(3 DOWNTO 0));END count60;ARCHITECTURE arc OF count60 ISSIGNAL a,b:STD_LOGIC_VECTOR(3 DOWNTO 0);SIGNAL sout:STD_LOGIC;BEGINPROCESS(clk)BEGINhh<=a; hl<=b;IF(clk'EVENT AND clk='1') THENIF(en='1') THENIF(a="0101" AND b="1001") THENa<="0000";b<="0000";ELSE IF(b="1001") THENa<=a+'1';b<="0000";ELSE b<=b+'1';END IF;END IF;END IF;END IF;END PROCESS;sout<='1' WHEN a="0101" AND b="1001" ELSE '0';cout<=sout AND en;END arc;4-7显示译码模块LIBRARY IEEE;USE IEEE.STD_LOGIC_1164.ALL;ENTITY segment4to7 ISPORT(s:IN STD_LOGIC_VECTOR(3 DOWNTO 0);a,b,c,d,e,f,g:OUT STD_LOGIC);END segment4to7;ARCHITECTURE arc OF segment4to7 IS SIGNAL y:STD_LOGIC_VECTOR(6 DOWNTO 0); BEGINa<= y(6);b<= y(5);c<= y(4);d<= y(3);e<= y(2); f<= y(1);g<= y(0);PROCESS(s)BEGINCASE s ISWHEN "0000"=>y<="1111110"; WHEN "0001"=>y<="0110000"; WHEN "0010"=>y<="1101101"; WHEN "0011"=>y<="1111001"; WHEN "0100"=>y<="0110011"; WHEN "0101"=>y<="1011011"; WHEN "0110"=>y<="1011111"; WHEN "0111"=>y<="1110000"; WHEN "1000"=>y<="1111111"; WHEN "1001"=>y<="1111011"; WHEN OTHERS=>y<="0000000"; END CASE;END PROCESS;END arc;带闹钟控制模块LIBRARY IEEE;USE IEEE.STD_LOGIC_1164.ALL;ENTITY mode_adjust_with_alarm ISPORT (adjust,mode,clk1hz: IN STD_LOGIC;clkh,enh,clkm,enm,clks,enha: OUT STD_LOGIC;clkh_a,clkm_a:OUT STD_LOGIC;mode_ss: OUT STD_LOGIC_VECTOR(2 DOWNTO 0));END mode_adjust_with_alarm;ARCHITECTURE arc OF mode_adjust_with_alarm ISTYPE mystate IS (s0,s1,s2,s3,s4,s5);SIGNAL c_state,next_state: mystate;BEGINPROCESS (c_state)BEGINCASE c_state ISWHEN s0=> next_state <= s1; clkh<=clk1hz; clkm<=clk1hz; clks<=clk1hz;enh<='0'; enm<='0'; enha<='0'; clkh_a<= '0'; clkm_a<= '0'; mode_ss <="000";WHEN s1=> next_state <= s2; clkh<=adjust; clkm<= '0'; clks<='0';enh<='1'; enm<='0';enha<='0'; clkh_a<= '0';clkm_a<= '0'; mode_ss <="001";WHEN s2=> next_state <= s3; clkh<= '0'; clkm<=adjust; clks <= '0';enh<='0';enm<='1';enha<='0'; clkh_a<= '0'; clkm_a<= '0'; mode_ss <="010";WHEN s3=> next_state <= s4; clkh<= '0'; clkm<= '0'; clks<=adjust;enh<='0'; enm<='0';enha<='0'; clkh_a<= '0'; clkm_a<= '0'; mode_ss <="011";WHEN s4=> next_state <= s5; clkh<= clk1hz; clkm<= clk1hz; clks<=clk1hz;enh<='0';enm<='0';enha<='1'; clkh_a<=adjust; clkm_a<= '0'; mode_ss <="100";WHEN s5=> next_state <= s0; clkh<= clk1hz; clkm<= clk1hz; clks<=clk1hz;enh<='0'; enm<='0'; enha<='0'; clkh_a<= '0'; clkm_a<=adjust; mode_ss <="101";END CASE;END PROCESS;PROCESS (mode)BEGINIF (mode'EVENT AND mode='1') THENc_state<=next_state ;END IF;END PROCESS;END arc;扫描模块LIBRARY IEEE;USE IEEE.STD_LOGIC_1164.ALL;USE IEEE.STD_LOGIC_UNSIGNED.ALL;ENTITY scan ISPORT(clk256hz:IN STD_LOGIC;ss:OUT STD_LOGIC_VECTOR(2 DOWNTO 0));END scan;ARCHITECTURE arc OF scan ISTYPE mystate IS (s0, s1,s2,s3,s4,s5);SIGNAL c_state,next_state: mystate;BEGINPROCESS ( c_state )BEGINCASE c_state ISWHEN s0=> next_state <=s1; ss<="010";WHEN s1=> next_state <=s2; ss<="011";WHEN s2=> next_state <=s3; ss<="100";WHEN s3=> next_state <=s4; ss<="101";WHEN s4=> next_state <=s5; ss<="110";WHEN s5=> next_state <=s0; ss<="111";END CASE;END PROCESS;PROCESS (clk256hz)BEGINIF (clk256hz'EVENT AND clk256hz='1') THENc_state<=next_state ;END IF;END PROCESS;END arc;复用模块LIBRARY IEEE;USE IEEE.STD_LOGIC_1164.ALL;ENTITY mux ISPORT(hh,hl,mh,ml,sh,sl,hha,hla,mha,mla:IN STD_LOGIC_VECTOR(3 DOWNTO 0);ss,mode_ss:IN STD_LOGIC_VECTOR(2 DOWNTO 0);y:OUT STD_LOGIC_VECTOR(3 DOWNTO 0);alarm:OUT STD_LOGIC);END mux;ARCHITECTURE arc OF mux ISSIGNAL a,hhtmp,hltmp,mhtmp,mltmp,shtmp,sltmp:STD_LOGIC_VECTOR(3 DOWNTO 0);BEGINPROCESS(mode_ss)BEGINCASE mode_ss ISWHEN "000"=>hhtmp<=hh; hltmp<=hl; mhtmp<=mh; mltmp<=ml; shtmp<=sh; sltmp<=sl;WHEN "001"=>hhtmp<=hh; hltmp<=hl; mhtmp<=mh; mltmp<=ml; shtmp<=sh; sltmp<=sl;WHEN "010"=>hhtmp<=hh; hltmp<=hl; mhtmp<=mh; mltmp<=ml; shtmp<=sh; sltmp<=sl;WHEN "011"=>hhtmp<=hh; hltmp<=hl; mhtmp<=mh; mltmp<=ml; shtmp<=sh; sltmp<=sl;WHEN "100"=> hhtmp<=hha; hltmp<=hla; mhtmp<=mha; mltmp<=mla; shtmp<=sh; sltmp<=sl;WHEN "101"=> hhtmp<=hha; hltmp<=hla; mhtmp<=mha; mltmp<=mla; shtmp<=sh; sltmp<=sl;WHEN OTHERS=>hhtmp<="0000";hltmp<="0000";mhtmp<="0000";mltmp<="0000";shtmp<="0000";sltmp<="0000"; END CASE;END PROCESS;PROCESS(ss)BEGINCASE ss ISWHEN "010"=> a <=hhtmp;WHEN "011"=> a <=hltmp;WHEN "100"=> a <=mhtmp;WHEN "101"=> a <=mltmp;WHEN "110"=> a <=shtmp;WHEN "111"=> a <=sltmp;WHEN OTHERS => a <="0000";END CASE;y<=a;END PROCESS;alarm<='1' WHEN ((hh=hha)AND(hl=hla)AND(mh=mha)AND(ml=mla)) ELSE '0';END arc;闪烁模块LIBRARY IEEE;USE IEEE.STD_LOGIC_1164.ALL;USE IEEE.STD_LOGIC_UNSIGNED.ALL;ENTITY blink_control ISPORT(ss,mode_ss:IN STD_LOGIC_VECTOR(2 DOWNTO 0);blink_en:OUT STD_LOGIC);END blink_control;ARCHITECTURE arc OF blink_control ISBEGINPROCESS (ss,mode_ss)BEGINIF(ss="010" AND mode_ss="001") THEN blink_en<='1';ELSIF(ss="011" AND mode_ss="001") THEN blink_en<='1';ELSIF(ss="100" AND mode_ss="010") THEN blink_en<='1';ELSIF(ss="101" AND mode_ss="010") THEN blink_en<='1';ELSIF(ss="110" AND mode_ss="011") THEN blink_en<='1';ELSIF(ss="111" AND mode_ss="011") THEN blink_en<='1';ELSIF(ss="010" AND mode_ss="100") THEN blink_en<='1';ELSIF(ss="011" AND mode_ss="100") THEN blink_en<='1';ELSIF(ss="100" AND mode_ss="101") THEN blink_en<='1';ELSIF(ss="101" AND mode_ss="101") THEN blink_en<='1';ELSE blink_en<='0';END IF;END PROCESS;END arc;Top文件LIBRARY IEEE;USE IEEE.STD_LOGIC_1164.ALL;USE IEEE.STD_LOGIC_UNSIGNED.ALL;ENTITY design3 ISPORT (mode,adjust,clk1hz,clk2hz,clk256hz,clk1khz:IN STD_LOGIC;alarm,a,b,c,d,e,f,g:OUT STD_LOGIC;ss:OUT STD_LOGIC_VECTOR(2 DOWNTO 0));END design3;ARCHITECTURE arc OF design3 ISCOMPONENT mode_adjust_with_alarm PORT (adjust,mode,clk1hz: IN STD_LOGIC;clkh,enh,clkm,enm,clks,enha: OUT STD_LOGIC;clkh_a,clkm_a:OUT STD_LOGIC;mode_ss: OUT STD_LOGIC_VECTOR(2 DOWNTO 0));END COMPONENT;COMPONENT scan PORT (clk256hz:IN STD_LOGIC;ss:OUT STD_LOGIC_VECTOR(2 DOWNTO 0));END COMPONENT;COMPONENT segment4to7 PORT (s: IN STD_LOGIC_VECTOR(3 DOWNTO 0);a,b,c,d,e,f,g: OUT STD_LOGIC);END COMPONENT;COMPONENT mux PORT(hh,hl,mh,ml,sh,sl,hha,hla,mha,mla:IN STD_LOGIC_VECTOR(3 DOWNTO 0);ss,mode_ss:IN STD_LOGIC_VECTOR(2 DOWNTO 0);y:OUT STD_LOGIC_VECTOR(3 DOWNTO 0);alarm:OUT STD_LOGIC);END COMPONENT;COMPONENT blink_control PORT(ss,mode_ss:IN STD_LOGIC_VECTOR(2 DOWNTO 0);blink_en:OUT STD_LOGIC);END COMPONENT;COMPONENT count24 PORT (clk,en:IN STD_LOGIC;cout:OUT STD_LOGIC;hh,hl:OUT STD_LOGIC_VECTOR(3 DOWNTO 0));END COMPONENT;COMPONENT count60 PORT (clk ,en:IN STD_LOGIC;cout:OUT STD_LOGIC;hh,hl:OUT STD_LOGIC_VECTOR(3 DOWNTO 0));END COMPONENT;SIGNALclkh,enh,clkm,enm,clks,clkh_a,clkm_a,coutm,couts,coutm_en,couts_en,cout,vcc,coutma_en,coutma,alarm1,bli nk_en,blink_tmp,enha: STD_LOGIC;SIGNAL mode_ss,ss1:STD_LOGIC_VECTOR(2 DOWNTO 0);SIGNAL hh,hl,mh,ml,sh,sl,hha,hla,mha,mla,y,i:STD_LOGIC_VECTOR(3 DOWNTO 0);BEGINvcc<='1';coutm_en <= enh OR coutm;couts_en <= enm OR couts;coutma_en<= enha OR coutma;blink_tmp<=blink_en and clk2hz;i(3)<=y(3) OR blink_tmp;i(2)<=y(2) OR blink_tmp;i(1)<=y(1) OR blink_tmp;i(0)<=y(0) OR blink_tmp;ss<=ss1;alarm<=alarm1 AND clk1khz;u1:mode_adjust_with_alarmPORT MAP( adjust,mode,clk1hz,clkh,enh,clkm,enm,clks,enha,clkh_a,clkm_a,mode_ss);u2:count24 PORT MAP(clkh,coutm_en,cout,hh,hl);u3:count60 PORT MAP(clkm,couts_en,coutm,mh,ml);u4:count60 PORT MAP(clks,vcc,couts,sh,sl);u5:count24 PORT MAP(clkh_a,coutma_en,cout,hha,hla);u6:count60 PORT MAP(clkm_a,vcc,coutma,mha,mla);u7:mux PORT MAP(hh,hl,mh,ml,sh,sl,hha,hla,mha,mla,ss1,mode_ss,y,alarm1);u8:scan PORT MAP(clk256hz,ss1);u9:blink_control PORT MAP(ss1,mode_ss,blink_en);u10:segment4to7 PORT MAP(i,a,b,c,d,e,f,g);END arc;实验结果:数字钟包括正常的时分秒计时, 实验箱左下角的6个动态数码管(DS6 A~DS1A)显示时、分、秒。
led数码显示实验报告
led数码显示实验报告LED数码显示实验报告引言:在现代电子技术领域中,LED(Light Emitting Diode)作为一种重要的光电器件,被广泛应用于数码显示、照明和通信等领域。
本实验旨在通过对LED数码显示的实验研究,深入了解其工作原理和特性。
一、实验目的本实验的主要目的是通过实际操作,掌握LED数码显示的原理和应用。
具体目标包括:1. 理解LED数码显示的基本工作原理;2. 掌握LED数码显示的驱动电路设计;3. 学会使用Arduino等开发板进行LED数码显示的控制。
二、实验原理1. LED数码显示的基本工作原理LED数码显示是利用LED的发光特性,通过控制不同的LED点亮或熄灭,来显示数字或字符。
每个LED都是由一个发光二极管和一个驱动电路组成。
当驱动电路给LED提供足够的电流时,LED会发光。
而当电流不足时,LED则熄灭。
2. LED数码显示的驱动电路设计LED数码显示的驱动电路通常采用多路复用方式。
以共阳极七段数码管为例,其驱动电路设计如下:- 使用NPN型晶体管作为开关,控制每个LED的点亮和熄灭;- 使用限流电阻限制LED的电流,避免过流损坏;- 使用Arduino等开发板产生控制信号,实现对LED数码显示的控制。
三、实验步骤1. 准备实验材料和设备,包括七段数码管、NPN型晶体管、限流电阻、Arduino开发板等;2. 按照电路图连接实验电路,确保连接正确无误;3. 编写Arduino程序,控制各个LED的点亮和熄灭,实现数字显示;4. 上传程序到Arduino开发板,并观察LED数码显示的效果;5. 调整程序,实现不同数字或字符的显示。
四、实验结果与分析通过实验,我们成功实现了LED数码显示的控制。
通过编写程序,我们可以控制每个LED的点亮和熄灭,从而实现数字或字符的显示。
同时,我们还观察到LED数码显示的亮度和颜色随电流的变化而变化。
通过调整限流电阻的值,我们可以控制LED的亮度,而通过改变驱动电流的方向,我们可以改变LED的颜色。
实验四 数码管显示控制

实验四数码管显示控制一、实验目的1、熟悉Keil uVision2软件的使用;2、掌握LED数码管显示接口技术;3、理解单片机定时器、中断技术。
二、实验设备及仪器Keil μVision2软件;单片机开发板;PC机一台三、实验原理及内容1、开发板上使用的LED 数码管是四位八段共阴数码管(将公共端COM接地GND),其内部结构原理图,如图4.1所示。
图4.1共阴四位八段LED数码管的原理图图4.1表明共阴四位八段数码管的“位选端”低电平有效,“段选端”高电平有效,即当数码管的位为低电平,且数码管的段为高电平时,相应的段才会被点亮。
实验开发板中LED数码管模块的电路原理图,如图4.2所示。
SP1a~hP0.4~P0.7SP2P0.0~P0.3图4.2 LED数码管模块电路原理图图中,当P1.0“段控制”有效时,P0.0~P0.7分别对应到数码管的a~h段。
当P1.1“位控制”有效时,P0.0~P0.7分别对应到DIG1~DIG8。
训练内容一:轮流点亮数码管来检测数码管是否正常。
参考程序:ORG 00HAJMP MAINMAIN:SETB P1.2;LED流水灯模块锁存器的控制位MOV P0,#0FFH;关闭LED灯CLR P1.2SETB P1.3 ;点阵模块的行控制锁存器MOV P0,#0 ;关闭点阵行CLR P1.3MOV A,#11111110B;数码管“位选信号”初值,低电平有效LOOP:SETB P1.1;数码管位控制锁存器有效MOV P0,ACLR P1.1RL A ;形成新的“位选信号”,为选择下一位数码管做准备SETB P1.0;数码管段控制锁存器有效MOV P0,#0FFH ;数码管的所有段点亮,显示“8”CLR P1.0CALL DELAYSJMP LOOPDELAY:MOV R5,#0;延时子程序D1: MOV R6,#0D2:NOPDJNZ R6,D2DJNZ R5,D1RETEND训练内容二:静态显示,0~9计数。
实验四 七段数码管显示实验报告
实验四七段数码管显示实验一、实验目的掌握数码管显示数字的原理。
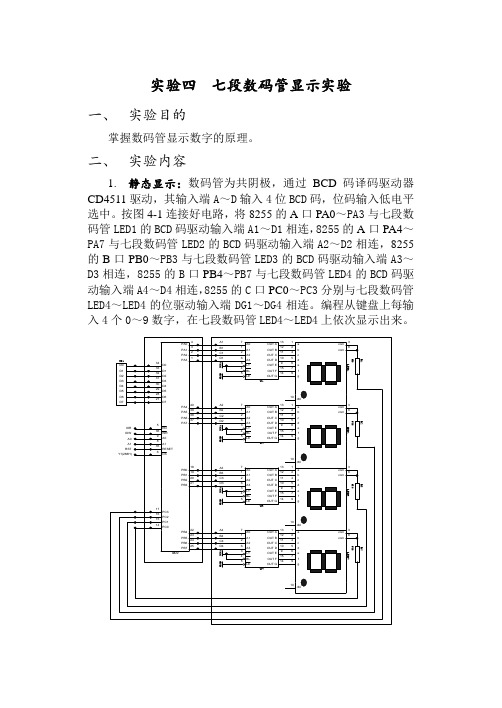
二、实验内容1.静态显示:数码管为共阴极,通过BCD码译码驱动器CD4511驱动,其输入端A~D输入4位BCD码,位码输入低电平选中。
按图4-1连接好电路,将8255的A口PA0~PA3与七段数码管LED1的BCD码驱动输入端A1~D1相连,8255的A口PA4~PA7与七段数码管LED2的BCD码驱动输入端A2~D2相连,8255的B口PB0~PB3与七段数码管LED3的BCD码驱动输入端A3~D3相连,8255的B口PB4~PB7与七段数码管LED4的BCD码驱动输入端A4~D4相连,8255的C口PC0~PC3分别与七段数码管LED4~LED4的位驱动输入端DG1~DG4相连。
编程从键盘上每输入4个0~9数字,在七段数码管LED4~LED4上依次显示出来。
图4-12.动态显示:数码管为共阴极,段码采用相同驱动,输入端加高电平,选中的数码管对应段点亮,位码采用同相驱动,位码输入端低电平选中,按图4-2连接好电路,图中只画了2个数码管,实际是8个数码管,将8255的A口PA0~PA7分别与七段数码管的段码驱动输入端a~g相连(32TCI0模块上的J1连32LED8模块J2),8255的C口的PC0~PC7接七段数码管的段码驱动输入(32TCI0模块上的J3连32LED8模块J1),跳线器K1连2和3。
编程在8个数码管上显示“12345678”。
按任意键推出运行。
图4-2三、编程提示1.由于DVCC卡使用PCI总线,所以分配的IO地址每台微机可能都不用,编程时需要了解当前的微机使用那段IO地址并进行处理。
2.对实验内容1,七段数码管字型代码与输入的关系如下表:四、参考流程图1.实验内容一的参考流程图图4-3 2.实验内容二的参考流程图图4-4五、参考程序1.内容一的参考程序源程序清单如下:data segmentioport equ 0c400h-0280hio8255a equ ioport+288hio8255b equ ioport+289hio8255c equ ioport+28ahio8255k equ ioport+28bhled db 3fh,06h,5bh,4fh,66h,6dh,7dh,07h,7fh,6fhmesg1 db 0dh,0ah,'Input a num (0--9),other key is exit:',0dh,0ah,'$'bz db ?cz db 04hdata endscode segmentassume cs:code,ds:datastart: mov ax,datamov ds,axmov dx,io8255k ;使8255的A口为输出方式mov ax,80hout dx,alsss0: mov si,offset bzmov cx,04hsss1: mov dx,offset mesg1 ;显示提示信息mov ah,09hint 21hmov ah,01 ;从键盘接收字符int 21hcmp al,'0' ;是否小于0jl exit ;若是则退出cmp al,'9' ;是否大于9jg exit ;若是则退出sub al,30h ;将所得字符的ASCII码减30Hmov [si],al ;存入显示缓冲区inc si ;显示缓冲区指针加1dec cx ;判断输入满4个数字吗?jnz sss1 ;不满继续mov si,offset bz ;从显示缓冲区取第一个数字的BCD 码mov al,[si]and al,0fh ;屏蔽高四位暂存ALinc si ;显示缓冲区指针加1mov ah,[si] ;取第二个数字的BCD码到AHsal ah,4h ;右移4次到高四位add al,ah ;两个BCD码合并成一个字节mov bl,al ;暂存入BLinc simov al,[si] ;取第三个数字的BCD码and al,0fhinc simov ah,[si] ;取第四个数字的BCD码到AHsal ah,4hadd ah,almov al,ahmov dx,io8255a ;从8255的A口输出(后两个数字)out dx,almov al,blmov dx,io8255b ;从8255的B口输出(前两个数字)out dx,almov al,0f0hmov dx,io8255c ;从8255的C口输出位码out dx,almov dl,0ffhmov ah,06int 21hje sss0 ;有键按下则退出exit: mov ah,4ch ;返回int 21hcode endsend start2.内容二的参考程序源程序清单如下:data segmentioport equ 0C400h-0280hio8255c equ ioport+28ahio8255k equ ioport+28bhio8255a equ ioport+288hled db 3fh,06h,5bh,4fh,66h,6dh,7dh,07h,7fh,6fh ;段码buffer1 db 01h,02h,03h,04h,05h,06h,07h,08h ;存放要显示的十位和个位con db ? ;位码data endscode segmentassume cs:code, ds:datastart: mov ax,datamov ds,axmov dx,io8255k ;将8255设为A口C口输出mov al,80hout dx,alloop2: mov al,08h ;设置数码管位计数器初值到CON mov byte ptr con,almov si,offset buffer1 ;置显示缓冲器指针SImov ah,7fh ;置位码初值disp0: mov cx,0ffffhmov bl,ds:[si] ;取显示缓冲区显示值存BXmov bh,0hpush simov dx,io8255c ;位码从C口输出mov al,ahout dx,almov dx,io8255amov si,offset led ;置led数码表偏移地址为SIadd si,bx ;求出对应的led数码mov al,byte ptr [si]out dx,al ;段码从A口输出disp1: loop disp1 ;延时mov cx,0ffffhdisp2: loop disp2ror ah,01h ;位码右移1位pop siinc si ;显示缓冲区指针加1mov al,byte ptr condec almov byte ptr con,aljnz disp0 ;数码管位计数器减1为0吗?,不为0继续mov dx,io8255a ;为0,关数码管显示mov al,0out dx,almov dl,0ffhmov ah,06int 21hje loop2 ;有键按下则退出mov ah,4ch ;返回int 21hcode endsend start实验总结:通过这次试验,我了解到自定义数据类型可以根据自己的需要方便设定,有很大的灵活性。
单片机实验报告——LED数码管显示实验
单片机实验报告——LED数码管显示实验引言单片机是一种基础的电子元件,作为电子专业的学生,学习单片机编程是必不可少的。
在单片机编程实验中,学习如何使用IO口驱动LED数码管显示是重要的一部分。
在此次实验中,我们用到的是STM32F103C8T6单片机,与之相配套的是LED数码管、杜邦线等元件,并利用Keil uVision5软件进行编程操作。
本文的目的是通过实验与实验数据的分析说明单片机控制LED数码管的方法,希望对单片机初学者有所帮助。
实验原理1.LED数码管简介LED数码管是利用发光二极管实现数字和字母的显示,其外观形式有共阳和共阴两种。
共阳型数码管的共阳端是接在公共的端子上,数字和字母的每一个元素(即1、2、3、4、5、6、7、8、9、A、B、C、D、E、F)的生命延伸出去,称为”高”电平;共阴型数码管的共阴端是接在公共的端子上,数字和字母的每一个元素的生命也是分别延伸出去,但称为”低”电平。
2.STM32F103C8T6单片机STM32F103C8T6单片机是一款功能完备的32位MCU产品,它具有高性能,低功耗的特点,可广泛应用于许多硬件系统。
此次实验所需的LED数码管的显示量是5个(共阳型),因此我们只需要5个IO口即可将STM32F103C8T6单片机与LED数码管连接起来。
实验材料STM32F103C8T6单片机、LED数码管、杜邦线、电容、电阻、面包板等。
实验步骤1.硬件连接:将LED数码管的针脚连接到单片机的IO口,如下图所示:其中P0-P4分别代表数字0-4,PE2口作为LED点亮控制口,分别接入面包板中。
2.软件设置:使用Keil uVision5进行程序编写,将代码下载到单片机控制器内,开启电路,即可观察到LED数码管上的数字进行了变化。
代码如下所示:实验结果将程序下载到开发板后,启动单片机,即可看到红色LED数码管逐个显示从0-9的数字。
达到9后又从0开始循环。
实验过程及结论本次实验中彻底了解到了用单片机控制LED数码管的方法,单片机控制LED数码管变化是通过选中不同的IO口来完成的,利用Keil uVision5软件可以完成程序编写。
led数码显示控制实验报告
led数码显示控制实验报告LED数码显示控制实验报告引言:在现代科技的发展中,LED(Light Emitting Diode)数码显示控制技术得到了广泛的应用。
它具有高亮度、低功耗、长寿命等优势,被广泛应用于电子产品、汽车、舞台灯光等领域。
本实验旨在通过对LED数码显示控制的研究和实践,探索其工作原理以及应用场景。
一、实验目的本实验的主要目的是通过设计与搭建一个简单的LED数码显示电路,实现对数字的显示和控制。
通过实际操作,深入了解LED数码显示控制的工作原理以及相关的电路设计和控制方法。
二、实验材料1. LED数码管:用于显示数字的组件,通常由7个发光二极管组成。
2. 数码显示驱动芯片:用于控制LED数码管的亮灭,实现数字的显示。
3. 电路板:用于搭建实验电路。
4. 电阻、电容:用于限流和滤波。
5. 面包板、导线等。
三、实验步骤1. 搭建电路:根据实验要求,将LED数码管、数码显示驱动芯片以及其他所需元件连接在电路板上。
确保接线正确、稳固。
2. 编程控制:通过编程,实现对数码显示驱动芯片的控制。
根据需要显示的数字,设置相应的控制信号,通过控制芯片的输出状态来控制LED数码管的亮灭。
3. 调试测试:将电路连接到电源,进行调试测试。
观察LED数码管的显示情况,检查是否符合预期的结果。
如有问题,及时排查故障并修复。
4. 实验数据记录:记录实验中的关键数据和结果,包括电流、电压、亮度等参数的测量结果,以及LED数码管的显示效果等。
四、实验结果与分析在实验中,我们通过搭建LED数码显示电路,成功实现了对数字的显示和控制。
通过编程控制,我们可以灵活地改变数码管上显示的数字,实现了灵活性和可变性的要求。
在实验过程中,我们还发现LED数码管的亮度和电流之间存在一定的关系。
通过改变电流的大小,我们可以调节数码管的亮度。
这为我们在实际应用中的亮度调节提供了一定的参考。
此外,在实验中我们还注意到,LED数码管的显示效果会受到环境光的影响。
LED数码管显示实验

电子信息工程系实验报告课程名称:单片机原理及接口(应用)实验项目名称: LED 数码管显示实验实验时间: 班级: 姓名: 学号:一、实 验 目 的熟悉keil 仿真软件、proteus 仿真软件、软件仿真板的使用。
了解并熟悉一位数码管与多位LED 数码管的电路结构、与单片机的连接方法及其应用原理。
学习proteus 构建LED 数码管显示电路的方法,掌握C51中单片机控制LED 数码管动态显示的原理与编程方法。
二、实 验 环 境硬件:Window XP ; 软件:keil C51单片机仿真调试软件,proteus 系列仿真调试软件;三、实 验 原 理LED 显示器是由发光二极管显示字段的显示器件。
在单片机应用系统中通常使用的是七段LED ,这种显示器有共阴极与共阳极两种。
例如共阴极,如图1所示。
管脚配置如图2所示。
图1 共阴极 图2 管脚配置共阴极LED 显示器的发光二极管阴极共地,当某个发光二极管的阳极为高电平时,该发光二极管则点亮;共阳极LED 显示器的发光二极管阳极并接。
七段LED 数码管与单片机连接时,只要将一个8位并行输出口与显示器的发光二极管引脚相连即可。
多位七段LED 数码管与单片机连接时将所有LED 的段选线并联在一起,由一个八位I /O 口控制,而位选线分别由相应的I /O 口线控制。
例如:段选码的推导(1)要显示字母C ——则a 、f 、e 、d 灯亮。
(2)因为共阴——则a 、f 、e 、d 送0时才亮。
(3)段选dp-a 为——11000110。
由于所有位的段选码皆由一个I /O 控制,因此,在每个瞬间,多位LED 只可能显示相同的字符。
要想每位显示不同的字符,必须采用动态扫描显示方式。
即在每一瞬间只使某一位显示相应字符。
在此瞬间,位选控制I /O 口在该显示位送入选通电平(共阴极送低电平、共阳极送高电平)以保证该位显示相应字符,段选控制I /O 口输出相应字符段选码。
如此轮流,使每位显示该位应显示字符,并保持延时一段时间,以造成视觉暂留效果。
微机原理实验四LED数码管显示实验
微机原理实验四LED数码管显示实验LED数码管显示实验是微机原理中的一项重要实验,通过该实验可以学习到数码管的工作原理以及如何通过控制数字信号来实现数字的显示。
本文将详细介绍实验所需材料和步骤,并解析实验原理。
一、实验材料1.STM32F407开发板2.数码管模块3.面包板4.连接线5.杜邦线二、实验原理数码管是一种能够显示数字的装置,它由七个发光二极管组成,分别代表数字0-9、通过控制这七个发光二极管的亮灭,可以显示出不同的数字。
在实验中,我们使用STM32F407开发板来控制数码管。
数码管模块通过引脚与STM32F407开发板进行连接,其中共阴数码管的引脚与开发板的GPIO引脚相连,通过控制GPIO引脚的高低电平来控制数码管的亮灭。
三、实验步骤1.在面包板上连接数码管模块。
将数码管模块的引脚与STM32F407开发板的相应引脚通过杜邦线连接。
具体连接方式可以参考数码管模块和开发板的引脚定义。
2. 打开STM32CubeMX软件,创建一个新工程。
选择适合的开发板型号,并进行引脚配置。
将引脚配置为通用输出模式,并将相应的引脚定义为控制数码管的引脚。
3. 在生成的代码中找到main.c文件,在其中添加控制数码管的代码。
首先需要引入相应的头文件,并定义控制数码管的引脚宏定义。
4. 在main函数中,初始化控制数码管的引脚为输出模式。
然后通过控制引脚的高低电平来实现数码管的亮灭。
四、实验结果与分析经过以上步骤,我们成功控制了数码管的显示。
数码管显示的数字由控制引脚的高低电平确定,通过改变控制引脚的电平可以实现不同的数字显示。
值得注意的是,数码管的亮灭是通过切换引脚的电平来实现的,当引脚为高电平时,数码管熄灭;反之,当引脚为低电平时,数码管亮起。
在实际应用中,可以通过编写代码来改变控制引脚的电平,从而实现字母、字符、动画等更加复杂的显示效果。
五、实验总结本次实验通过控制STM32F407开发板的GPIO引脚,成功实现了LED数码管的显示。
数码管实验报告实验原理(3篇)
第1篇一、实验背景数码管是一种常用的显示器件,它可以将数字、字母或其他符号显示出来。
数码管广泛应用于各种电子设备中,如计算器、电子钟、电子秤等。
本实验旨在通过实践操作,让学生了解数码管的工作原理,掌握数码管的驱动方法,以及数码管在电子系统中的应用。
二、实验原理1. 数码管类型数码管分为两种类型:七段数码管和液晶数码管。
本实验主要介绍七段数码管。
七段数码管由七个发光二极管(LED)组成,分别代表七个笔画。
当七个LED中的某个或某几个LED点亮时,就可以显示出相应的数字或符号。
根据发光二极管的连接方式,七段数码管可分为共阳极和共阴极两种类型。
2. 数码管驱动方式(1)静态驱动静态驱动是指每个数码管独立驱动,每个数码管都连接到单片机的I/O端口。
这种方式下,数码管显示的数字或符号不会闪烁,但需要较多的I/O端口资源。
(2)动态驱动动态驱动是指多个数码管共用一组I/O端口,通过控制每个数码管的扫描时间来实现动态显示。
这种方式可以节省I/O端口资源,但显示的数字或符号会有闪烁现象。
3. 数码管显示原理(1)共阳极数码管共阳极数码管的特点是七个LED的阳极连接在一起,形成公共阳极。
当要显示数字时,将对应的LED阴极接地,其他LED阴极接高电平,即可显示出相应的数字。
(2)共阴极数码管共阴极数码管的特点是七个LED的阴极连接在一起,形成公共阴极。
当要显示数字时,将对应的LED阳极接地,其他LED阳极接高电平,即可显示出相应的数字。
4. 数码管驱动电路(1)BCD码译码驱动器BCD码译码驱动器是一种将BCD码转换为七段数码管所需段码的电路。
常用的BCD码译码驱动器有CD4511、CD4518等。
(2)74HC595移位寄存器74HC595是一种8位串行输入、并行输出的移位寄存器,常用于数码管的动态驱动。
它可以将单片机输出的串行信号转换为并行信号,驱动数码管显示。
三、实验目的1. 了解数码管的工作原理和驱动方式。
数码管显示实验报告
一、实验目的1. 理解数码管的工作原理及驱动方式。
2. 掌握51单片机控制数码管显示的基本方法。
3. 学会使用动态扫描显示技术实现多位数码管的显示。
4. 提高编程能力和实践操作能力。
二、实验原理数码管是一种常用的显示器件,它由多个发光二极管(LED)组成,可以显示数字、字母或其他符号。
根据LED的连接方式,数码管可分为共阴极和共阳极两种类型。
本实验使用的是共阳极数码管。
51单片机控制数码管显示的基本原理是:通过单片机的I/O口输出高低电平信号,控制数码管的各个段(a-g)的亮灭,从而显示相应的数字或符号。
动态扫描显示技术是将多个数码管连接到单片机的I/O口,通过快速切换各个数码管的显示状态,实现多位数码管的显示。
三、实验器材1. 51单片机实验板2. 共阳极数码管3. 电阻、电容等元件4. 仿真软件(如Proteus)5. 编译器(如Keil)四、实验步骤1. 搭建电路:按照实验原理图连接51单片机、数码管和电阻等元件。
2. 编写程序:使用Keil软件编写控制数码管显示的程序。
程序主要包括以下部分:a. 初始化:设置单片机的工作状态,配置I/O口等。
b. 显示函数:根据需要显示的数字或符号,控制数码管的各个段亮灭。
c. 动态扫描函数:实现多位数码管的动态显示。
3. 编译程序:将编写好的程序编译成机器码。
4. 仿真测试:使用Proteus软件对程序进行仿真测试,观察数码管的显示效果。
5. 实验验证:将程序烧录到51单片机实验板上,进行实际测试。
五、实验结果与分析1. 实验结果:通过仿真测试和实际测试,数码管能够正确显示0-9的数字。
2. 结果分析:实验结果表明,51单片机可以成功地控制数码管显示数字。
动态扫描显示技术能够有效地实现多位数码管的显示,提高了显示效率。
六、实验总结1. 通过本次实验,我们掌握了51单片机控制数码管显示的基本方法,提高了编程能力和实践操作能力。
2. 动态扫描显示技术能够有效地实现多位数码管的显示,提高了显示效率。
LED数码管显示实验.doc
第1页共9页信息工程学院实验报告课程名称:单片机原理及接口实验项目名称:LED数码管显示实验实验时间:2016年3月11日班级:通信141 姓名:学号:一、实验目的:熟悉keil仿真软件、proteus仿真软件、软件仿真板的使用。
了解并熟悉一位数码管与多位LED数码管的电路结构、与单片机的连接方法及其应用原理。
学习proteus构建LED数码管显示电路的方法,掌握C51中单片机控制LED数码管动态显示的原理与编程方法。
二、实验设备与器件硬件:微机、单片机仿真器、单片机实验板、连线若干软件:KEIL C51单片机仿真调试软件,proteus系列仿真调试软件三、实验原理LED显示器是由发光二极管显示字段的显示器件。
在单片机应用系统中通常使用的是七段LED,这种显示器有共阴极与共阳极两种。
共阴极LED显示器的发光二极管阴极共地,当某个发光二极管的阳极为高电平时,该发光二极管则点亮;共阳极LED显示器的发光二极管阳极并接。
七段LED数码管与单片机连接时,只要将一个8位并行输出口与显示器的发光二极管引成绩:指导老师(签名):af begcddp1 2 3 4 510 9 8 7 6g f a be d c dp(a) 共阴极(b) 共阳极(c) 管脚配置第2页共9页脚相连即可。
8位并行输出口输出不同的字节数据即可获得不同的数字或字符,通常将控制发光二极管的8位字节数据称为段选码。
多位七段LED数码管与单片机连接时将所有LED的段选线并联在一起,由一个八位I/O口控制,而位选线分别由相应的I/O口线控制。
如:8位LED动态显示电路只需要两个八位I/O口。
其中一个控制段选码,另一个控制位选。
由于所有位的段选码皆由一个I/O控制,因此,在每个瞬间,多位LED 只可能显示相同的字符。
要想每位显示不同的字符,必须采用动态扫描显示方式。
即在每一瞬间只使某一位显示相应字符。
在此瞬间,位选控制I/O口在该显示位送入选通电平(共阴极送低电平、共阳极送高电平)以保证该位显示相应字符,段选控制I/O口输出相应字符段选码。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验内容:
1、八字段LED数码管驱动显示工作原理
2、74LS138三—八译码器工作原理及如何控制数码管工作原理
3、数码管动态显示工作原理分析与计算
4、数码管多种显示实验
实验讲义:
一、七字段数码管显示工作原理
共阴级接法
共阳级接法
共阳极接法字形表
字符
h(DP)
g
f
e
d
c
b
a
P0口
输入
3—8译码器输出
现象
P2口的值
P21
P21
P20
C
B
A
Y7
Y6
Y5
Y4
Y3
Y2
Y1
Y0
0x00
0
0
0
1
1
1
1
1
1
1
0பைடு நூலகம்
Y0对应的数码管亮
0x01
0
0
1
1
1
1
1
1
1
0
1
Y1对应的数码管亮
0x02
0
1
0
1
1
1
1
1
0
1
1
Y2对应的数码管亮
0x03
0
1
1
1
1
1
1
0
1
1
1
Y3对应的数码管亮
0x04
1
0
0
1
1
4、让Y0所对应的数码管显示“5”,停留1秒,再让Y1显示“5”,…………以此类推最后Y7显示“5”,移动字幕
5、在8个数码管上稳定显示“i love you”
6、数码管动态显示程序清单
#include<reg52.h>
void delaym(unsigned int t)//延时子程序,入口参数ms,延迟时间=t*1ms,t=0~65535
①静态显示驱动:静态驱动也称直流驱动。静态驱动是指每个数码管的每一个段码都由一个单片机的I/O端口进行驱动,或者使用如BCD码二-十进制译码器译码进行驱动。静态驱动的优点是编程简单,显示亮度高,缺点是占用I/O端口多,如驱动5个数码管静态显示则需要5×8=40根I/O端口来驱动,要知道一个89S52单片机可用的I/O端口才32个呢:),实际应用时必须增加译码驱动器进行驱动,增加了硬件电路的复杂性。
//0-9,a-f显示的段码
void main()
{
unsigned int i,j;
while(1)
{
for(j=0;j<16;j++)//为了循环显示数组b[9]里的9个数字0-9
{
for(i=0;i<8;i++)//为了让8个数码管轮流亮一遍过去
{
P0=b[j];
P2=0;
delaym(250);
P0.7
P0.6
P0.5
P0.4
P0.3
P0.2
P0.1
P0.0
P0(16进制)
全灭
1
1
1
1
1
1
1
1
FF
显示0
1
1
0
0
0
0
0
0
C0H
显示1
1
1
1
1
1
0
0
1
F9H
显示2
1
0
1
0
0
1
0
0
A4H
显示3
1
0
1
1
0
0
0
0
B0H
显示4
1
0
0
1
1
0
0
1
99H
显示5
1
0
0
1
0
0
1
0
92H
显示6
1
0
0
0
0
0
1
0
82H
②动态显示驱动:数码管动态显示接口是单片机中应用最为广泛的一种显示方式之一,动态驱动是将所有数码管的8个显示笔划"a,b,c,d,e,f,g,dp"的同名端连在一起,另外为每个数码管的公共极COM增加位选通控制电路,位选通由各自独立的I/O线控制,当单片机输出字形码时,所有数码管都接收到相同的字形码,但究竟是那个数码管会显示出字形,取决于单片机对位选通COM端电路的控制,所以我们只要将需要显示的数码管的选通控制打开,该位就显示出字形,没有选通的数码管就不会亮。通过分时轮流控制各个数码管的的COM端,就使各个数码管轮流受控显示,这就是动态驱动。在轮流显示过程中,每位数码管的点亮时间为1~2ms,由于人的视觉暂留现象及发光二极管的余辉效应,尽管实际上各位数码管并非同时点亮,但只要扫描的速度足够快,给人的印象就是一组稳定的显示数据,不会有闪烁感,动态显示的效果和静态显示是一样的,能够节省大量的I/O端口,而且功耗更低。
利用3-8译码器来选择需要显示(亮)哪个数码管,利用P0口来负责显示什么数字或符号
1、让Y0所对应的数码管显示“0”—“9”,间隔1秒
2、让Y0所对应的数码管显示“0”,Y1显示“1”,Y2显示“2”…………以此类推最后Y7显示“7”,间隔1秒
3、让Y0所对应的数码管显示“0”,Y1显示“1”,Y2显示“2”…………以此类推最后Y7显示“7”,间隔4毫秒,注意观察现象,和实验2有何区别
1
0
1
1
1
1
Y4对应的数码管亮
0x05
1
0
1
1
1
0
1
1
1
1
1
Y5对应的数码管亮
0x06
1
1
0
1
0
1
1
1
1
1
1
Y6对应的数码管亮
0x07
1
1
1
0
1
1
1
1
1
1
1
Y7对应的数码管亮
三、数码管驱动方式及动态显示工作原理分析与计算
1、人眼的视觉暂留现象
数码管要正常显示,就要用驱动电路来驱动数码管的各个段码,从而显示出我们要的数字,因此根据数码管的驱动方式的不同,可以分为静态式和动态式两类。
}
}
}
}
2、数码管使用的电流与电压计算
电流:静态时,推荐使用10-15mA;动态时,16/1动态扫描时,平均电流为4-5mA,峰值电流50-60mA。
电压:查引脚排布图,看一下每段的芯片数量是多少?当红色时,使用1.9V乘以每段的芯片串联的个数;当绿色时,使用2.1V乘以每段的芯片串联的个数。
四、数码管显示实验
显示7
1
1
1
1
1
0
0
0
F8H
显示8
1
0
0
0
0
0
0
0
80H
显示9
1
0
0
1
1
0
0
0
98H
详情分析可以启动51单片机工具箱软件,选择“数码管字形”生成选项进行字形分析。
二、74LS138三—八译码器工作原理及如何控制数码管工作原理
注:上图是工程样品图。实际修改后的电路板图将接入9012三极管的Y0-Y7顺序改为Y7-Y0
{
unsigned char j;//j=0~255
while(t--)
{
for(j = 0; j < 125; j++);//j进行的内部循环,1次延迟8us
}
}
//数码管显示程序
unsigned char b[16]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0x88,0x83,0xc6,0xa1,0x86,0x8e};