数控机床机械结构设计分析
CK6136数控卧式车床机械结构设计(有cad图)
硬质合金刀具粗加工铸铁工件 硬质合金刀具半精加工碳钢工件 螺纹(丝杠等)加工和铰孔
通过比较最后选取:
Vmax=300 Vmin=6
m min
m min
(2) 主轴的极限转速 计算车床主轴极限转速时的的加工直径, 按经验分别取 (0.1~0.2) D 和(0.45~0.5)D。 则主轴极限转速应为:
1
1 数控车床的加工特点分析
1.1 数控车床的优点
数控车床已越来越多的应用于现代制造业,并发挥出普通车床无法比拟的优势, 数控车床主要有以下几优点: (1) 传动链短,与普通车床相比主轴驱动不再是电机 皮带 齿轮副机构变速, 而是采用横向和纵向进给分别由两台伺服电机驱动运动完成,不再使用挂轮、离合器 等传统部件,传动链大大缩短。 (2) 刚性高,为了与数控系统的高精度相匹配,数控车床的刚性高,以便适应 高精度的加工要求。 (3) 轻拖动,刀架(工作台)移动采用滚珠丝杠副,摩擦小,移动轻便。丝杠 两端的支承式专用轴承,其压力角比普通轴承大,在出厂时便选配好;数控车床的润 滑部分采用油雾自动润滑,这些措施都使得数控车床移动轻便。
1.2 数控车床加工特点 qq2567214873
(1) 自动化程度高,可以减轻操作者的体力劳动强度。数控加工过程是按输入 的程序自动完成的,操作者只需起始对刀、装卸工件、更换刀具,在加工过程中, 主 要是观察和监督车床运行。但是,由于数控车床的技术含量高,操作者的脑力劳动相 应提高。 (2) 加工零件精度高、 质量稳定。 数控车床的定位精度和重复定位精度都很高, 较容易保证一批零件尺寸的一致性,只要工艺设计和程序正确合理,加之精心操作, 就可以保证零件获得较高的加工精度,也便于对加工过程实行质量控制。 (3) 生产效率高。数控车床加工是能再一次装夹中加工多个加工表面,一般只 检测首件,所以可以省区普通车床加工时的不少中间工序,如划线、尺寸检测等,减 少了辅助时间,而且由于数控加工出的零件质量稳定,为后续工序带来方便,其综合 效率明显提高。 (4) 便于新产品研制和改型。数控加工一般不需要很多复杂的工艺装备,通过 编制加工程序就可把形状复杂和精度要求较高的零件加工出来,当产品改型,更改设 计时,只要改变程序,而不需要重新设计工装。所以,数控加工能大大缩短产品研制 周期,为新产品的研制开发、产品的改进、改型提供了捷径。 (5) 可向更高级的制造系统发展。数控车床及其加工技术是计算机辅助制造的 基础。
数控机床机械结构设计与制造技术分析

数控机床机械结构设计与制造技术分析数控机床是一种集机电一体、工作自动化的高科技机械设备,其应用领域日益扩大。
在现代制造领域,数控机床已经成为不可缺少的工具,具有工作高效、精度稳定、自动化程度高等优势。
因此,数控机床的机械结构设计和制造技术的分析对于提高机床的性能和质量意义重大。
本文将从数控机床机械结构设计和制造技术两个方面进行探讨。
数控机床机械结构设计是数控技术的重要组成部分,其主要目的是实现工件的高精度加工。
机械结构设计的核心是构建合理的机械结构,它必须实现切削力的传递,确保传动精度和稳定性,并满足机床高速、高精度加工的需要。
1.数控机床结构布局设计数控机床的结构设计以其性能和稳定性为基础,应该尽可能减少结构的复杂度和重量,提高加工精度和效率。
必须综合考虑机床结构与传动系统,并结合数控系统决定结构的布局设计。
2.数控机床动力传动系统数控机床的动力传动系统是保证机床高速、高精度运动的重要组成部分。
传动系统的设计要求高传动精度、高刚性、低噪声、低能耗等。
在设计中,应当选择合适的传动方式和传动件,合理布置传动方式和传动件,保证传动精度和稳定性。
3.数控机床加工台面数控机床加工台面的设计与制造是实现高精度加工关键,加工台面的设计包括机床工作台的结构和运动方式等,制造应当满足加工、表面平整度和精度等要求。
加工时台面应确保精度修整及完整性,保证工件与工具成定心运动,达到加工工件的精度要求。
数控机床的制造技术包括各种机床部件的加工装配工艺和制造工具。
制造过程中应严格遵守工艺规程,保证机床实现高精度加工的要求。
同时,应该使用高品质的材料和制造工具。
数控机床结构部件加工的精度要求高,包括螺旋齿轮的加工、齿轮啮合的匹配、齿轮的零件标记、联轴器的面精度等。
因此,必须采用高精度的加工设备和工具,采用精细的加工工艺。
2.数控机床结构部件的装配数控机床结构部件的装配是保证机床高精度、高效率的关键。
在装配过程中,应根据机床的设计规格,对各个零部件进行精密配合或插配,确保机床的高稳定性和高度精度。
数控机床横向进给系统及结构设计
数控机床横向进给系统及结构设计数控机床横向进给系统及结构设计是数控机床中的一个重要部分,它直接影响到机床的加工精度、工作效率和生产成本。
在数控机床横向进给系统及结构设计中,需要考虑机床的加工要求、切削力的大小、进给速度的要求以及机床的稳定性等因素。
首先,数控机床横向进给系统的结构设计需要满足机床的刚性要求。
因为加工过程中会产生较大的切削力,所以机床的结构需要具有足够的刚性来抵抗这些力的影响,以保证机床的稳定性和加工精度。
一般来说,数控机床的横向进给系统常采用直线导轨或滚珠丝杠来进行传动,以增加机床的刚性。
其次,数控机床横向进给系统的设计需要考虑进给速度的要求。
在机床的加工过程中,进给速度对于加工效率和产品质量都有着重要的影响。
因此,在设计机床横向进给系统时,需要根据加工要求和机床的机械性能来确定进给速度的范围,并选择合适的传动机构和驱动装置,以保证机床能够稳定地工作。
另外,数控机床横向进给系统的机械结构设计还需要考虑工件夹持的方式和刀具的切削过程。
在数控机床加工中,工件夹持对于加工精度和工件表面质量有着重要的影响。
因此,在设计进给系统时需要选择合适的夹具形式,并确保夹持方式稳定可靠。
此外,在切削过程中,刀具的选择、刀具的切削参数以及刀具的冷却方式也需要考虑进去。
最后,数控机床横向进给系统还需要考虑到对于各种故障的容错性和维护性的要求。
在机床的运行过程中,可能会出现各种故障,而这些故障的解决和维护会对机床的稳定性和使用寿命产生影响。
因此,在设计进给系统时,需要考虑到对故障的容错性设计和维护的便利性,以保证机床能够稳定地运行。
综上所述,数控机床横向进给系统及结构设计是一个综合性的过程,需要考虑到机床的加工要求、切削力的大小、进给速度的要求以及机床的稳定性等因素。
通过合理的设计,可以使机床的进给系统更加稳定可靠,从而提高加工效率和产品质量。
数控立车全自动夹紧工作台的结构设计

数控立车全自动夹紧工作台的结构设计引言:在现代制造业中,数控机床的广泛应用极大提高了生产效率和产品质量。
然而,工件的装夹操作仍然是一个耗时耗力的手动过程。
为了实现自动化生产,设计一种全自动夹紧工作台至关重要。
本文介绍了一种数控立车全自动夹紧工作台的结构设计。
1. 设计目标- 实现工件的快速自动装夹- 保证工件夹紧位置精度和重复定位精度- 兼容不同尺寸和形状的工件- 整体结构紧凑,占用空间小2. 总体结构该工作台由底座、滑台、夹具模块和控制系统组成。
底座提供稳固的安装基础。
滑台在底座上做直线往复运动,用于工件的装卸。
夹具模块安装在滑台上,用于自动夹紧和定位工件。
控制系统负责协调各个部件的动作。
3. 滑台机构滑台采用直线导轨和丝杠传动方式,确保运动平稳、无间隙。
伺服电机驱动丝杠旋转,推动滑台在导轨上往复移动。
行程开关和光电编码器用于滑台的位置检测和控制。
4. 夹具模块夹具模块由多个可调节的卡爪组成,通过液压或气动执行机构驱动卡爪开合。
卡爪采用活动铰链结构,可自适应不同形状的工件。
定位销钉和定位块用于精确定位工件。
可更换不同规格的卡爪,以适应不同工件。
5. 控制系统工业控制器集成运动控制和功能,实现滑台运动和夹具动作的协调控制。
人机界面实现参数设置和状态监视。
安全保护装置如光栅、防护门等确保人身安全。
6. 工作流程(1)滑台移至装卸位置;(2)放置工件,夹具模块自动夹紧;(3)滑台移至加工位置,立车开始加工;(4)加工完成,滑台移至装卸位置,夹具松开,卸下工件。
总结:该数控立车全自动夹紧工作台实现了工件自动装夹,提高了生产效率,减轻了工人劳动强度。
模块化设计使系统具有良好的适应性和灵活性。
未来可进一步优化控制算法和人机交互界面。
试谈数控机床_加工中心的结构设计
试谈数控机床、加工中心的结构设计中国纺织大学 狄 岚 宁江机床厂 狄锦如 摘要 数控机床、加工中心为了适应高速、高效、高精度,受大负荷的需要,需在主轴组件、导轨设计上改进,在传动连接件上采用胀套式,防护罩上采用全封闭式以及在夹紧机构等上采用浮动夹紧方法等。
关键词 主轴组件 导轨 传动件胀套式 防护罩 夹紧机构 虽然数控机床、加工中心是由普通机床发展而来,但要满足高速、高效、高精度又要能承受大负荷,普通机床的传统结构已不能满足要求。
在加工中心等机床设计上必须采用一些适合于数控机床的结构。
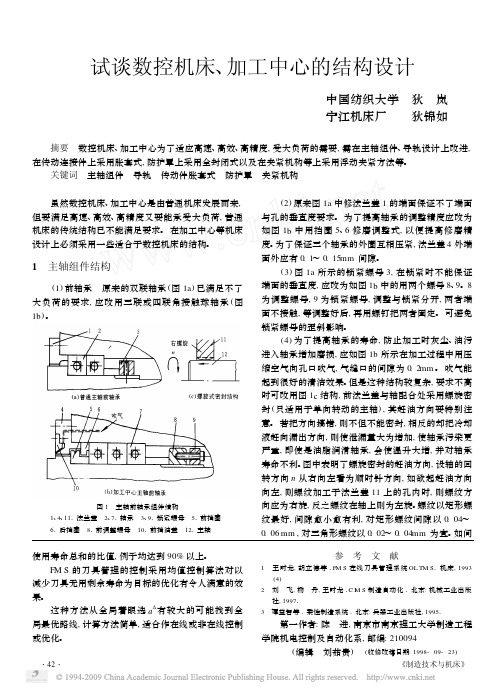
1 主轴组件结构 (1)前轴承 原来的双联轴承(图1a )已满足不了大负荷的要求,应改用三联或四联角接触球轴承(图1b )。
图1 主轴前轴承组件结构1、4、111法兰盖2、71轴承3、91锁紧螺母 51前挡圈61后挡圈 81前调整螺母 101前挡油盖 121主轴 (2)原来图1a 中修法兰盖1的端面保证不了端面与孔的垂直度要求。
为了提高轴承的调整精度应改为如图1b 中用挡圈5、6修磨调整式,以便提高修磨精度。
为了保证三个轴承的外圈互相压紧,法兰盖4外端面外应有0.1~0.15mm 间隙。
(3)图1a 所示的锁紧螺母3,在锁紧时不能保证端面的垂直度,应改为如图1b 中的用两个螺母8、9。
8为调整螺母,9为锁紧螺母,调整与锁紧分开,两者端面不接触,等调整好后,再用螺钉把两者固定。
可避免锁紧螺母的歪斜影响。
(4)为了提高轴承的寿命,防止加工时灰尘、油污进入轴承增加磨损,应如图1b 所示在加工过程中用压缩空气向孔口吹气,气缝口的间隙为0.2mm 。
吹气能起到很好的清洁效果。
但是这种结构较复杂,要求不高时可改用图1c 结构,前法兰盖与轴配合处采用螺旋密封(只适用于单向转动的主轴),其赶油方向要特别注意。
若把方向搞错,则不但不能密封,相反的却把冷却液赶向漏出方向,则使泄漏量大为增加,使轴承污染更严重,即使是油脂润滑轴承,会使温升大增,并对轴承寿命不利。
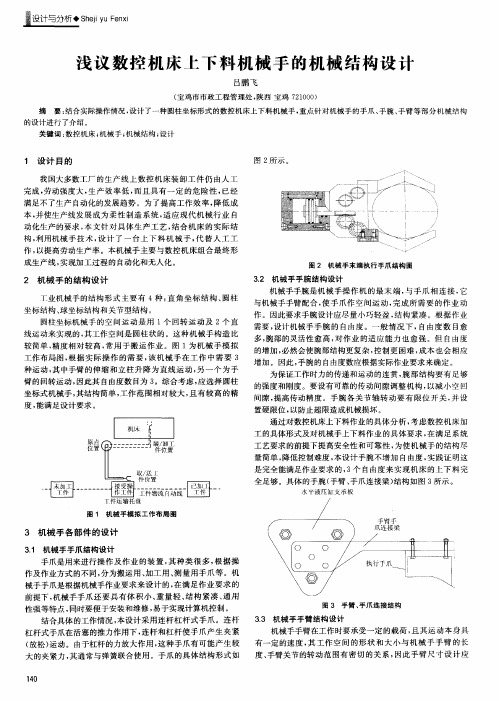
浅议数控机床上下料机械手的机械结构设计
有一定 的速度 , 其 工作 空间 的形状 和大小 与机 械手手 臂 的长
度、 手 臂 关 节 的转 动 范 围有 密 切 的 关 系 , 因此 手 臂 尺 寸 设 计 应
大 的夹紧力 , 其通常与弹簧联合使用 。手爪 的具体 结构形式如
1 4 0
s n e j t y u e n x ● ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ● 主 ● ■ ■ ■ ■ 坌 ■ ■ ■ ■ 堑 ■ ■ ■ ● 雾 ● 一
满 足其工作 空间要求 。同时, 为了提高机械手 的运动速度 与控 制精度 , 应在保证机 械手手 臂有足 够强度 和刚度 的条 件下 , 尽 可能在结构 上、 材料 上设法 减轻手 臂的重 量 ; 为提高机 械手 手
图2 所示 。
满 足不 了生产 自动化 的发展趋势 。为了提高工作效率 , 降低成
本, 并使 生产 线 发 展 成 为 柔 性 制 造 系 统 , 适应 现代机械行 业 自
动化生产 的要求 , 本文针对 具体生产 工艺 , 结合 机床 的实际结
构, 利 用 机械 手 技 术 , 设 计 了一 台上下 料机 械手 , 代 替人 工工
的设计 进行 了介绍 。 关 键词 : 数 控机 床 ; 机 械手 ; 机 械结构 ; 设计
1 设 计 目 的
我 国大 多数 1 厂 的 生 产 线 上 数 控 机 床 装 卸 工 件 仍 由 人 工 完成 , 劳 动强 度 大 , 生产效 率低 , 而且具有一 定的危 险性 , 已 经
的强 度 和 刚度 。要 设 有 可靠 的传 动 间 隙调 整 机 构 , 以减 小 空 回
间隙, 提高传动精度 。手腕 各关节轴转 动要有 限位开关 , 并 设
数控机床上下料机械手设计

数控机床上下料机械手设计前言随着工业的不断发展和升级,机械制造产业已经成为了各国经济发展不可或缺的重要组成部分。
数控机床则是机械制造产业中的重要设备之一。
而数控机床上下料机械手,作为数控机床的附属设备,它的功能是在机床的输入、输出端之间自动输送加工件,减少了人力,提高了加工效率,为制造行业带来了极大的便利和效益。
本文将介绍数控机床上下料机械手的设计过程。
设计思路首先,在设计机械手之前,我们需要了解机械手的结构和工作原理。
1.机械手结构数控机床上下料机械手的结构一般分为机械手臂、机械手控制系统、夹手器、传感器和运动轴等主要部分。
其中,机械手臂是机械手的核心部件,它的结构一般采用铝合金或者碳纤维材料制作,具有较高的强度和刚度,能够承受较大的载荷;机械手控制系统则是机械手的智能核心,能够根据预设的程序进行自动化控制;夹手器则是机械手的末端执行器,用于夹持加工件;传感器则可以对加工件的位置、形状等进行检测和反馈;而运动轴则是机械手的实际运动部分,能够实现机械手的动作。
2.机械手工作原理数控机床上下料机械手的工作原理是通过控制机械手臂的运动轴和夹手器的打开、关闭,来实现机械手夹取、放置加工件的过程。
在机械手的控制系统中,我们可以预设机械手的运动轨迹和夹手器的运动规律,当接收到工艺指令后,机械手会按照预设的程序自动地执行加工件的夹取和放置操作。
在了解了机械手的结构和工作原理之后,我们可以开始设计机械手的具体实现方案。
设计方案1.机械手臂结构设计机械手臂的结构设计是机械手整体设计中的核心环节之一。
在设计机械手臂时,我们需要考虑以下几个方面:•材料的选择。
由于机械手臂需要具备较强的承载能力和刚度,因此在材料的选择上,我们可以考虑采用铝合金或者碳纤维等高强度材料,来满足机械手的结构要求。
•结构的设计。
机械手臂的结构设计需要采用工程力学理论,考虑机械手的承重和刚度等因素。
在结构设计中,需要确定机械手臂的长度、形状和悬挂方式等关键参数,保证机械手的稳定运行和准确夹取加工件的能力。
数控机床机械结构设计和制造技术的创新研究
数控机床机械结构设计和制造技术的创新研究摘要:广大设计师只有更好地通过创新思维来提升设计制造的技术才能够更好地创新数控机床内部的结构,为的是更好地增强数控机床的开发能力。
因此,只有在实践中有效地掌握与数控机床设计有关的原则才能够更好地提升数控机床设计的效率。
只有有效地创新数控机床内部的机械结构才能够更好地提升设计机床的效率,实际也可以更好地改进机床自身的质量。
通过在实践中有效地创新关键性结构才能够更好地改善设计的质量,最终才能够更好地提升机床本身的动态性能。
本文重点分析数控机床机械结构设计和制造技术,以更好地达到理想的效果。
关键词:数控机床;机械结构;结构设计;制造技术1数控机床机械结构概述1.1数控机床概念数控机床又称数控机床,是一种直接装有程序的自动机床。
大多数数控机床的内部机械都能在第一时间更有效地处理相关的编码和符号程序,并用编码来处理相关的数字,最终需要借助信息载体来控制整个数控设备[1]。
经过计算,大多数数控设备可以发出不同类型的控制信号,并根据不同图形的形状和要求直接加工零件。
大多数数控机床不仅能解决比较复杂、小批量等不同的问题,而且属于柔性技术。
大多数数控机床不仅代表了现代机床的控制方向,而且是典型的机电一体化产品。
1.2数控机床机械结构特点1.2.1灵活性强数控机床在加工零件方面与普通机床有着直接的区别,即使是整个机床也可以在没有更多程序的帮助下得到更好的调整。
因此,更多的数控机床可用于加工不同类型的零件,并可用于产品开发过程中。
在实际应用中,不仅可以直接缩短生产周期,而且可以直接降低生产成本。
1.2.2高加工精度大多数数控机床的实际精度可达0.05-0.1mm。
在实际应用中,利用不同的数字信号形式可以直接输出不同的脉冲信号。
数控机床中的大多数数控装置都可以用来控制传动链之间的间隙和螺杆之间的平均误差。
因此,从实践来看,数控机床的实际加工精度更高。
1.2.3实际质量稳定可靠如果能用合适的数控机床直接加工零件,所涉及的刀具、程序和刀具是相同的,数控机床生产的零件质量是相对稳定的。
定梁式数控龙门铣床整体结构设计
定梁式数控龙门铣床整体结构设计梁式数控龙门铣床是一种常见的数控机床,它的整体结构设计非常重要。
本文将从整体结构设计的角度出发,探讨梁式数控龙门铣床的设计要点和优化方法。
梁式数控龙门铣床的整体结构主要由机床床身、龙门横梁、工作台、滑块、主轴箱、进料机构、控制系统等组成。
其中,机床床身是数控龙门铣床的基础结构,承受整个机床的重力和切削力。
龙门横梁起到支撑和导向工作台的作用,承受加工过程中的惯性力和切削力。
工作台是工件安装和加工的平台,具有往复运动和旋转运动的功能。
滑块是主轴箱的运动装置,用于控制主轴的上下运动。
主轴箱包括主轴、减速器、驱动装置等,是数控龙门铣床的核心部件。
进料机构用于控制工作台的前进、后退和左右移动。
控制系统负责对整个机床的运动进行控制和监测,保证加工的精度和稳定性。
在整体结构设计中,需要考虑以下几个方面。
首先,应根据加工要求确定机床的加工范围和刚度需求,以确定床身的尺寸和形式。
其次,龙门横梁的尺寸和结构应考虑工作台的大小和负载要求,保证工作台的稳定性和刚度。
工作台的大小和形式应考虑加工件的尺寸和类型,以满足加工的要求。
滑块的结构和运动方式应具有足够的刚度和精度,以确保主轴的运动稳定和加工精度。
主轴箱的结构和轴承选择应考虑主轴的转速和刚度要求,以保证加工质量。
进料机构的结构和运动方式应根据加工件的尺寸和复杂程度来确定,以提高加工效率和质量。
最后,控制系统的性能和功能应与机床的结构相匹配,以实现精确的加工控制和监测。
在梁式数控龙门铣床整体结构设计中,需要注意优化设计。
首先,应采用适当的材料和结构形式,以提高机床的刚度和稳定性。
其次,应优化各组件的尺寸和位置,以减少功耗和噪声,并提高加工精度和效率。
此外,应选择合适的传动方式和轴承结构,以提高机床的工作精度和可靠性。
最后,应合理布置各部件和管线,以提高机床的维护便利性和使用寿命。
总之,梁式数控龙门铣床的整体结构设计是决定其加工质量和效率的关键因素。
定梁式数控龙门铣床整体结构设计

定梁式数控龙门铣床整体结构设计摘要:根据国内与国外對于龙门铣床的研究情况来看,此次设计一种可以用于加工各种复杂的零件的龙门数控铣床,符合实际的生产需要。
其结构主要包括了横向进给机构、纵向仅给机构、工作台以及立柱等的组成部分。
其运行是采用伺服电机然后是滚珠丝杠进行传动。
总体上讲述了其所包含的结构、特点以及其工作原理。
并且具体的阐述了此铣床的整体结构以及校核的方法对其进行了分析。
龙门铣床;数控;伺服电机;滚珠丝杠1 机床的设计要求数控龙门铣床的总体方案设计主要包括了:(1)总体布局设计:各个部件的位置、各个部件的运动进行分析、还有其整体的外观。
(2)技术参数设计:各个部件的尺寸、刀具的转速和进给量、电机的功率和所能承载的力。
(3)结构优化设计:整个机床的刚度、运动特性、受热性能等。
此机床符合国家的标准,其参数为:工作台的整体尺寸为:3000×1200mm,工作台所能承受的最大载荷为2吨,能够具有高的速度和效率,结构简单稳定,精度高且用于铣削较为复杂的零件。
2 设计方案我所设计的铣床主要是工作台能够做纵向移动的数控龙门铣床。
这种工作台移动的数控龙门铣床主要的特点包括了(1)成本低,生产较为简单。
这种龙门铣床的整体的长度必须比工作台行程的长度多两倍。
而移动式的龙门铣床的整体的长度就得是龙门架的侧面宽度与纵向行程之和。
(2)这种机床的动态响应好。
这种机床的龙门架是固定在立柱上的,所以当工作台移动时其所切屑的稳定性好,这样便保证了机床所加工零件的精度和动态响应性。
我所采用的为西门子 4-05的数控系统,因为这个数控系统具有龙门轴的同步功能。
这一项功能能够让龙门框架的进给轴(X1,X2)达到无机械偏差的位移的目的。
可以对运动的值进行比对,能够检测出很小的偏差并且及时的更正,增大了其精度。
铣床的整体装配图如下图所示:3 主轴箱的设计要求(1)使其所调节的速度范围能够达到其最大值而且能够进行无极变速。
(2)提高主轴箱的刚性与稳定性,以及它的精度。
数控机床机械结构设计和制造技术的创新研究

Internal Combustion Engine &Parts0引言数控机床是近些年逐渐发展起来的一种新型的自动化应用技术,其是高度机电一体化中的重要范畴。
随着科学技术水平的不断提升,机械结构设计的重要性越来越突出,科学合理的设计不仅可以提高机械结构的优越性,同时还可以提高机械产品的精度和效率。
因此,对数控机床的机械结构进行优质的设计,完善机械结构制造创新技术的发展,是提高机械生产企业发展的重要保障。
1数控机床机械结构设计介绍1.1数控机床介绍数控机床主要是把先进的科学技术、信息化技术、生产系统和操作指令进行有效的结合,提高信息化产品生产的效率和质量。
在数控机床的操作过程中,最为基础的内容是信息和数据,而最终的目标是实现产品的高效生产,把所需要生产的产品信息录入到信息系统中,从而提高所生产产品的精准度。
另外,在数控机床的操作过程中,还需要对其操作情况进行监管和控制,以此来保障生产产品的效率和质量;此外,随着科学技术水平的不断发展,数控机床相关的技术也需要进行不断的升级和优化,从而提高数控机床生产的高效性和稳定性。
1.2数控机床机械结构的优势第一,自动化优势。
在数控机床的生产操作过程中,主要采用了自动化的操作技术,提高了生产效率。
另外,除了成型和切割生产过程中需要人员进行参与之外,其他的生产都不需要人工来进行参与。
并且数控机床的自动化生产还可以保障生产出来工业产品的准确性、安全性更高,同时还减少了一些人力、物力、财力等不必要的浪费。
第二,高技术化优势。
数控机床在操作的过程中,主要是通过计算操作来执行的,这样通过精准的计算方式,不仅可以保障其生产的稳定性、精准性和安全性,同时在高水平的技术应用下,还可以提高生产效率和生产质量。
第三,智能化优势。
在数控机床的生产过程中,通过操作流程就可以实现智能化操作,提高数控机床集成功能。
另外,及时对数控机床的生产加工工序进行不断升级和优化,可以完全实现智能化操作,逐渐把人力解放出来,但是在这个过程中,需要对数控机床机械结构设计和制造技术进行不断的创新和发展,为数控机床的智能化提供重要的保障。
5轴数控龙门铣床机械结构设计(毕业论文)

学海无涯苦作舟!轴数控龙门铣床机械结构设计摘要现在世界上很多发达的工业化国家在生产中广泛应用数控机床。
随着电子技术和控制技术的飞速发展,当今的数控系统功能已经非常强大,而且随着数控技术的不断发展和应用领域的扩大,他对国计民生的一些重要行业的发展起着越来越重要的作用。
随着科学技术的发展,世界先进技术的兴起和不断成熟,对数控技术提出了更高的要求。
当今数控机床正在不断采用最新成果,朝着咼速化,超精度化,多功能化、智能化、系统化、网络化、咼可靠性与环保等方向发展。
本次毕业设计就是通过对5轴数控龙门铣床机械结构设计来加深对数控机床的了解。
通过本次毕业设计了解数控龙门铣床的机械结构,并对一些关键的部件进行校核。
并通过此次毕业设计熟练掌握一门三维绘图工具-Inven tor.关键词:滚珠丝杠,滚动导轨,五轴联动铣头, Inven tor.学海无涯苦作舟!A 5 AXIS NC MILLING PLANER MECHANICALSTRUCTURE DESIGNABSTRACTIn many adva need in dustrialized coun tries in the world now is widely used CNC machi ne in the product ion .With the rapid developme nt of electro nic tech no logy and con trol tech no logy, today's nu merical con trol system fun ctio n is very strong, and with the continuous development of numerical control tech no logy and applicati on field expa nds,it to some importa nt in dustry of the n ati onal economy and people's livel is playi ng a more and more importa nt role in the developme nt.With the developme nt of scie nee and tech no logy, the rise of the world's adva need tech no logy and matures, we put higher requireme nts on nu merical con trol tech no logy.Moder n nc machi ne tools Using the latest achievements , toward high speed, super precision, and multi-functional and intelligent, systematic, network, such as high reliability and environmental protecti on.This graduation design is based on the five axis nc milling planer mecha ni cal structure desig n to deepe n un dersta nding of nc mach ine tools.Through the graduation design ,I have understanded the mechanical structure of the CNC gantry milling machine, and some of the key components for check in g.A nd through the graduati on desig n I master a 3 dime nsinal draw ing tool - Inven tor.KEY WORDS : Ball screw , Rolli ng guide , Five-axis lin kage milli ng head, Inventor、八、亠丄刖言 (1)第1章数控机床概述 (2)第2章整体结构方案 (3)第3章伺服进给系统机械传动机构的设计 (4)§3.1伺服进给系统机械传动机构设计的一般要求 (4)§3.2滚珠丝杠螺母副的原理及支撑方式 (6)§3.2.1滚珠丝杠螺母副的原理及特点 (6)§322滚珠丝杠螺母副的支撑方式 (8)§3.2.3支承轴承的选择 (9)§3.3滚珠丝杠副的疲劳寿命计算 (9)§3.4预加负荷 (11)§3.5机床滚珠丝杠副总体校核 (11)§3.6数控机床导轨 (16)§3.6.1导轨的基本类型 (16)§3.6.2对导轨的基本要求 (16)§3.6.3直线滚动导轨 (17)第四章数控机床的进给驱动 (19)§4.1伺服系统的基本要求 (19)§4.2伺服电机的选择与计算 (21)结论 (26)参考文献 (27)致谢 (28)毕业设计是实现培养目标的重要教学环节,是培养大学生的创新能力、实践能力和创业精神的重要过程。
数控机床立柱结构有限元分析与优化设计研究

数控机床立柱结构有限元分析与优化设计研究近年来,随着工业自动化水平的不断提高,数控机床已成为制造业中不可或缺的重要设备。
而数控机床的结构强度、刚度对其加工精度、工作稳定性、寿命等方面也有着非常重要的影响。
本文旨在对数控机床立柱结构进行有限元分析和优化设计,以改善其结构强度和刚度,并提高其工作性能和使用寿命。
首先,本文选取了一台普通铣床的立柱结构作为研究对象,并通过Pro/E建立其三维CAD模型。
然后,利用ANSYS软件对立柱结构进行有限元分析,模拟其在静载荷作用下的应力和位移分布情况,并得出其结构强度和刚度等参数。
分析结果显示,立柱底部的最大应力较大,且刚度较低,易出现变形、破裂等问题,限制了机床的工作性能。
基于有限元分析的结果,本文进一步对数控机床立柱结构进行优化设计。
通过增大立柱的底部尺寸、增加立柱的挡板数量和加厚立柱壁板等措施,有效地提高了立柱的结构强度和刚度,并减小了其变形和破损等可能引起的损伤。
此外,在优化设计中采用了目标函数法对多个优化参数进行协同优化,最终得出了一组最优设计方案,使机床的工作性能得到了显著提升。
最后,本文对优化设计结果进行了验证。
将最优设计方案制造出来,并进行实际测试。
结果表明,设计方案得到的立柱结构强度和刚度均大幅提高,变形和破损等问题明显缓解,提高了机床的加工精度、工作稳定性和使用寿命,验证了本文优化设计的有效性和可行性。
总之,本文通过有限元分析和优化设计的方法,对数控机床立柱结构进行了改进和优化设计,提高了其强度和刚度等性能,增强了机床的工作性能和使用寿命。
该研究结果不仅对提升制造业的自动化水平具有重要的意义,也为其他相关领域的产品结构设计提供了有价值的借鉴和参考。
对于数控机床立柱结构的有限元分析和优化设计,需要收集和分析大量的相关数据。
这些数据包括材料力学性能参数、结构尺寸、静载荷等等。
下面将对这些数据进行分析。
1. 材料力学性能参数材料力学性能参数对数控机床立柱结构的有限元分析和优化设计具有直接影响。
数控立式铣床机械结构设计--结构设计
数控立式铣床机械结构设计数控机床作为一种高自动化、高柔性、高精度、高效率的机械加工设备,决定了它在现代制造业中占有越来越重要的作用。
近年来,我国在中高档数控机床关键技术上有了较大突破,创造出一批具有自主知识产权的研究成果。
目前,在实际应用中有部分工件在加工微型孑L或铣削平面时,加工精度不高。
如果我们用传统的数控铣床对其加工,将导致加工效率低且加大设备和电力的损耗。
根据这种情况,我们设计了一种小型数控立式铣床。
该铣床造价大大低于传统数控机床,还能够满足教学上的使用,提高学生对数控铣床的理解与认识。
下文就对它的机械结构设计作一介绍。
1 机床的总体布局本机床是一台采用立式布置的小型数控铣床,机床床身尺寸(长×宽×高)为600 mm×8OO mm×1 4051Tim,主要由(如图1机床的结构简图所示)机床底座,横向溜板,X、y、Z方向进给步进电动机,工作台,机床床身,三相异步电动机,主轴箱以及相关的电气系统等部分组成。
机床的加工过程为:被加工零件固定于工作台4上,能够实现横向、纵向的进给运动;铣刀装夹在主轴箱8上,能够沿立柱的上下移动,进行铣削加工。
整个加工过程由PC进行控制,实现工件的自动加工。
该数控铣床的主要技术参数为:最大钻孔直径:28 mm;最大铣削能力:平面2.6×10 mm。
;主轴箱上下移动最大行程:345 mm;工作台工作面积:730 n'ln3×350 n3n3;工作台最大纵向行程:450 mm;工作台最大横向行程:250 n3m;机床底座面积:400 ITlm×680 n3n3;主轴变速范围:8O~ 1 650 r/min2 机床主传动系统及主轴组件设计2.1 机床主传动系统数控铣床主传动系统由主轴电动机、传动系统和主轴部件等部分组成,它与普通机床主传动系统相比结构较简单,这是由于变速功能主要由无级变速电动机来承担。
五轴联动数控雕刻机结构设计

五轴联动数控雕刻机结构设计五轴联动数控雕刻机是一种先进的机械设备,广泛应用于木工、石材、金属等材料的雕刻加工领域。
它的结构设计非常重要,直接影响到设备的使用效率和加工质量。
本文将介绍五轴联动数控雕刻机的结构设计,包括机床结构、导轨选型、主轴设计等方面,希望能够为相关行业提供一些参考和借鉴。
1. 机床结构设计五轴联动数控雕刻机的机床结构是其重要组成部分,直接影响到设备的稳定性和精度。
通常采用龙门式结构或移动台式结构。
龙门式结构适用于大型工件的加工,其X、Y、Z轴的移动分别由龙门樑和立柱完成,结构稳定,刚度高,适合高速、高精度的加工。
移动台式结构适用于小型工件的加工,其Z轴移动由主轴完成,X、Y轴移动由工作台完成,结构简单,适合高速、高效的加工。
在机床结构设计的过程中,需要考虑到工件的尺寸、加工精度和加工效率等因素,选择合适的结构类型。
2. 导轨选型在五轴联动数控雕刻机的结构设计中,导轨的选型是非常关键的一步。
导轨的质量直接影响到机床的稳定性和精度。
目前市面上常用的导轨有滚动导轨和滑动导轨两种。
滚动导轨具有刚度大、精度高、使用寿命长的优点,适用于高精度的加工;滑动导轨具有摩擦小、抗冲击性好的优点,适用于高速的加工。
在导轨选型的过程中,需要根据设备的使用环境和加工需求综合考虑,选择合适的导轨类型。
3. 主轴设计五轴联动数控雕刻机的主轴是其核心部件之一,直接影响到加工质量和效率。
主轴的设计需要考虑到转速范围、功率、扭矩、刚度等因素。
通常采用串联或并联多电机驱动的方式来实现主轴的多轴联动。
串联多电机可以有效提高主轴的转速和功率,适用于高速、高精度的加工;并联多电机可以提高主轴的扭矩和刚度,适用于重载、切削加工。
在主轴设计的过程中,需要充分考虑到加工材料、加工工艺和加工精度等因素,选择合适的主轴类型和驱动方式。
4. 运动控制系统设计五轴联动数控雕刻机的运动控制系统是其关键部件之一,用于控制机床的各个轴的运动。
数控机床上下料机器人结构设计

数控机床上下料机器人结构设计数控机床上下料机器人是一种用于自动化上下料的机器人系统,能够将工件从输送线上取下并放置到机床上,并在机加工完成后将工件从机床上取下并放回到输送线上。
该机器人系统的结构设计至关重要,可以影响其性能和效率。
下面将介绍一个典型的数控机床上下料机器人的结构设计。
1.机械臂结构设计:机械臂是数控机床上下料机器人的核心组成部分,其结构设计需要满足以下要求:-能够实现机械臂在水平和垂直方向上的运动;-具有足够的负载能力和刚度,以保证安全和稳定的工作;-能够实现高精度的定位和运动控制。
机械臂通常采用关节式结构,由多个关节连接而成。
每个关节由电机和传动机构驱动,并通过编码器和传感器来实现位置反馈和控制。
机械臂的关节设计需要考虑运动范围、力矩和速度要求,以及紧凑和轻量化的设计。
2.夹具设计:夹具用于固定和夹持工件,保证其在加工过程中的稳定性。
夹具的设计需要考虑以下几个方面:-夹具应能适应不同类型和尺寸的工件;-夹具应具有足够的刚度和精度,以确保工件的准确定位;-夹具的操作应简单、快捷且可靠,以提高机器人的工作效率。
夹具通常采用气动或液压系统来实现夹持和释放操作。
夹具的设计需要根据工件的特点和加工要求,选择合适的夹具结构和控制方式。
3.视觉系统设计:视觉系统用于检测和定位工件,以实现精确的上下料操作。
视觉系统的设计需要考虑以下几个方面:-需要具备高分辨率和高灵敏度的摄像机,以获得清晰的工件图像;-需要配备适当的光源,以提供良好的照明条件;-需要配备图像处理和分析算法,以实现工件识别和定位功能。
视觉系统通常与机械臂的控制系统进行协同工作,以实现自动化的上下料操作。
视觉系统的设计需要根据工件的特点和识别要求,选择合适的摄像机和算法。
4.控制系统设计:控制系统是数控机床上下料机器人的核心,用于实现机械臂、夹具和视觉系统等各个组件的协同工作。
控制系统的设计需要满足以下要求:-需要具备高性能的运动控制和位置反馈功能;-需要具备高可靠性和稳定性,以确保系统的安全和正常工作;-需要具备良好的人机界面和通信功能,以方便操作和监控。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
传动结构大为简化 ,传动链也大 大缩短 。② 为适 应连续 ・
的 自动化加工 和提高加工生产率 ,数控机 床机械结 构具 有较 高 的静 、动 态刚 度 和阻 尼精 度 ,以及较 高 的耐 磨 性 ,而且热变形小 。③为减小摩擦 、消除传动 间隙和获 得更 高的加工精度 ,更多地采用 了高效传动部 件 ,如滚
小 限度 内,以保证所要求的加工精度与表面质量 。 为了提高数控机床主轴的刚度 ,不但 经常采 用三支
珠丝杠副 、 滚动导轨和消隙齿轮传 动副等 。④为 了改善
7个 ,铣刀主偏 角为 4 。 5 ,经过计算 ( 算过程略 ) 计 ,切 削时作用在工件表 面的总 压力约 10 0 0 N,由 l 支撑 0个 点 ( 主支撑点 3个和辅 助支撑点 7个 )承担 ,若按 每点 受到的力最大 20 0 N计算 ,支撑组柱件受到 的力通过 l 。 0
4 .应用情况
本夹具投入使用后 ,粗铣整体平面度 偏差 由此前 的
05~ . mm,减小到 0 1rm以内。原来精铣 出现的 由 . 08 .5 a
于粗铣变形问题造成余 量不均 ,出现 加工黑皮 ,以及精 加工后仍 然变形大等问题得 到解决 ,并保证 了在镗孔 加 工时 ,几乎不存在应 力变形 ,孑 的形状 精度 、孔对 面的 L
结构提 出以下要求 。
生产率 、加工精度和使用寿命提 出了更高的要 求。 数控机床 的主体机构有 以下特 点 :① 由于采 用 了高 性能的无 级变速主轴及伺服传动 系统 ,数控机床 的机械
1 较高的机床静、动态刚度 .
数控机床是按照数控编程或手动输 入数据方 式提供
的指令 自动进行加 工 的。由于机械 结构 ( 如机 床床 身 、
件需 要辅 助支撑 的夹具上 。
磊 工。 加 冷工
W W W . et wor ng 7 50 c n m a1 ki 9 . or
2f年 期 ■ 0f 第3 i
撑结构 ,而且选用刚性很好 的双 列短 圆柱 滚子轴承和角 接触向心推力轴承 ,以减小 主轴 的径 向和轴 向变形 。为 了提高机床大件的刚度 ,采用封闭界 面的床身 ,并采用
在数控机床发展 的最初 阶段 ,其 机械结构 与通用机 床相 比没有多大的变化 ,只是在 自动变速 、刀架 和工作 台 自动转位及 手柄操作等方 面做 些改变 。随着数 控技术
的发展 ,考虑 到它 的控制方式 和使用 特点 ,才对 机床 的
二、具体要 求
根据数控机床 的适用场合和机 构特点 ,对数 控机床
垂直度 、孔 之 间相对 位 置度 精 度 ,都 得 到 了有效 地保 证。从而保 证 了装 配精 度需 要 ,油封 孔 与 曲轴 的同 心
斜面分解 作用传 递 到气 缸上 的力 很小 (0 2 0×t l 。 a 0一 n
3 N) 5 ,因此可以选择较小 规格 的气缸直径及较短 的行 程 就能实现支撑 自锁。 ( )本 机构 的优 点 ①对 零 件 的制造 精 度要 求 不 4
数 控 机 床 机 械 结 构 设 计 分 析
沈阳机 床股份有限公司 中捷钻镗床厂 ( 辽宁 104 ) 易 刚 1 12
一
、
结构要求与总体布局
劳动条件 ,减少辅助时 间,改善操 作性 ,提 高劳动生产 率 ,采用 了刀具 自动夹 紧装置 、刀库 与 自动换 刀装置及 自动排 屑装置等辅助装置 。
除正常磨损外 ,未 出现过其 他问题 。此机 构的应用 ,提 高工件精度 ,最终 为提 高柴 油机产 品 的整机装 配质 量 , 降低产 品售后 的质量 ( 服务 )成本 ,从 而为企业取得可
撑柱斜面磨损后 ,对气缸上 升距 离的影 响十分微小 ,不
影响使用 。⑧ 当采用两点联动 时 ,由于两点位 置布置在
通过圆心的直径方 向上 ,且锁 紧销杆 斜面与 圆锥形体是 线接触 ,仍然可 以很好地达到平衡并 自锁 。④ 本机构 三 点支撑 可以不等高 ,可移植到( 收稿 日期 :2 1 11 ) 00 0 1
(0 0年 工 艺 征 文 获 奖 作 品 选 登 ) 21
液力平衡减少移动部件因位 置变 动造 成的机床变形 。为
生在刀具切入 的垂直方向上 ,这就可 以使 主轴 热变形对
加工直径 的影响降低到最小 限度 。在结构上还应 尽可能 减小主轴 中心与主轴 向地面 的距离 ,以减少热变 形的总 量 ,同时应使主轴箱 的前后温升一致 ,避免 主轴 变形 后
高 ,没有特殊的要求 ,便 于制造。支撑部件 上端还设 有 防尘套 ,防止切屑进 入支 撑柱 间隙 ,引起卡死 等现 象 ,
基本不需要维 护。② 当锁 紧销杆 两端 、锥形体 锥面或支
度 ,齿轮之间啮合精度 ,杜绝 漏油 ,减少 啮合不均 引起
的噪声 ,提高齿轮寿命等 。
本夹具 自投 人 生 产 以来 ,已加 工 零件 2 0多万 件。
数控机床中的滚珠丝杠常在载 荷大 、转 速高 、散 热 差的条件下工作 ,丝杠容易发热。滚珠 丝杠发热造成 的 后果是严重的 ,尤其是在开环系统 中,它会使进 给系统
丧失定位精度。 目前某些机床用 预拉的方法减少丝杠 的 热变形 。对于采取 了上述措施 仍不能消除 的热变 形,可 以根据测量结果 由数控系统发 出补偿脉冲加 以修正。
出 现倾 斜 。
了提高机床各 部件的接触 刚度 ,增加 机床 的承载能 力, 采用刮研 的方法增加单位面积上 的接触点 ,并 在结合面 之间施加 足够大的预加载荷 ,以增加接触 面积。这 些措 施都能有效地提高接触 刚度 。 为了充分发挥 数控机床的高效加工能力 ,并 能进行
稳定切削 ,在保证静态刚度 的前提下 ,还必须提高 动态