基于西门子PLC的码垛实训平台开发
基于西门子PLC的码垛实训平台开发

基于西门子PLC的码垛实训平台开发码垛是现代物流中常用的一种自动化操作,它能够将货物按照规定的方式堆叠起来,提高物流运作的效率。
为了培养学生的实际操作技能,提高他们对自动化设备的理解,开发一套基于西门子PLC的码垛实训平台是非常有必要的。
本文将介绍该实训平台的需求分析、设计思路以及实施方案。
一、需求分析1. 教学目标- 培养学生对自动化设备的操作技能。
- 提高学生的逻辑思维能力。
- 培养学生的团队合作精神和解决实际问题的能力。
2. 功能要求- 能够模拟物流环境,包括入库、出库、堆垛等操作。
- 能够通过编程控制PLC实现自动化操作。
- 能够进行故障模拟,测试学生的故障排除能力。
- 提供辅助教学功能,包括实时显示、实时数据采集和分析等。
3. 硬件要求- PLC设备:采用西门子的PLC设备,可根据实际需求选择合适的型号。
- 传感器:包括光电传感器、压力传感器、接近传感器等,用于检测货物的位置、状态等。
- 执行器:包括电机、气缸等,用于控制货物的运动。
- 输送带:用于将货物从一个位置传输到另一个位置。
- 电气元件:包括开关、继电器、变频器等,用于控制电路的开关和供电。
二、设计思路1. 实训平台结构设计实训平台由负责输送货物的输送带、负责堆垛货物的堆垛装置、PLC控制系统以及辅助设备组成。
堆垛装置和PLC控制系统的设计是实训平台的核心。
2. 堆垛装置设计堆垛装置需要能够实现货物的自动堆叠,可以设置不同的堆叠方式和堆叠高度。
其原理是通过电机和气缸控制货物的运动,通过传感器检测货物的位置和状态。
堆垛装置需要具有可靠的控制性能和稳定的运行性能。
3. PLC控制系统设计PLC控制系统负责控制堆垛装置的运动,根据传感器的反馈信息实现自动化操作。
通过编程可以实现不同的码垛方式和逻辑控制。
PLC控制系统需要具备高性能、高可靠性和易操作性。
三、实施方案1. 硬件采购根据实训平台的需求,采购相应的硬件设备,确保其符合实训的需要。
基于西门子PLC的自动化立体仓库堆垛机控制系统设计

基于西门子PLC的自动化立体仓库堆垛机控制系统设计【摘要】自动化立体仓库是建立在计算机管理技术、自动化控制技术和机械制造设计技术三者的基础上,它具有独立完成仓库物流作业的能力,准确的将货物运送至存取地点,并科学管理仓储信息,因而它是促进现代物流进程的关键。
自动化立体仓库堆垛机控制系统主要由计算机管理系统、高层货架和堆垛机三部分组成,本文针对其结构和工作流程进行了简单的介绍,并着重讲述了各子系统的硬件、软件设计,以促进自动化立体仓库堆垛机控制系统在现代物流仓管中的运用。
【关键词】自动化立体仓库系统;西门子;PLC1.前言现代物流技术和自动化技术的不断发展衍生了各种物流产品,立体仓库就是针对物流仓储常用的一种,立体仓库作为自动化技术的产品,它综合了自动控制技术与计算机管理技术,借助堆垛机对货物实现存取操作,自动化立体仓库堆垛机不仅具有存取货物的功能,它还能对货物进行分类、分拣、计数和配送等操作。
自动化立体仓库主要由计算机控制系统、自动化堆垛机和高层货架三部分组成,多个功能子系统共同构成了物流仓储的信息系统。
随着客户对物流信息化要求增高,切实掌握仓储情况及时更新仓储信息成了现代物流信息化的重要因素,为了提高物流信息的可靠性和实时性,我们必须保证立体仓库系统具有正常作业和信息统计功能。
除此之外还需提高立体仓库系统的柔性化,在系统中融入条形码扫描技术和射频计数等采集货物信息的技术,以满足现代物流自动化需求。
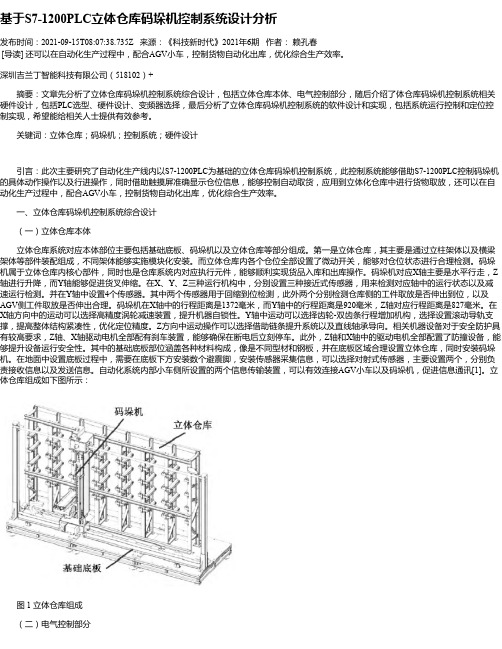
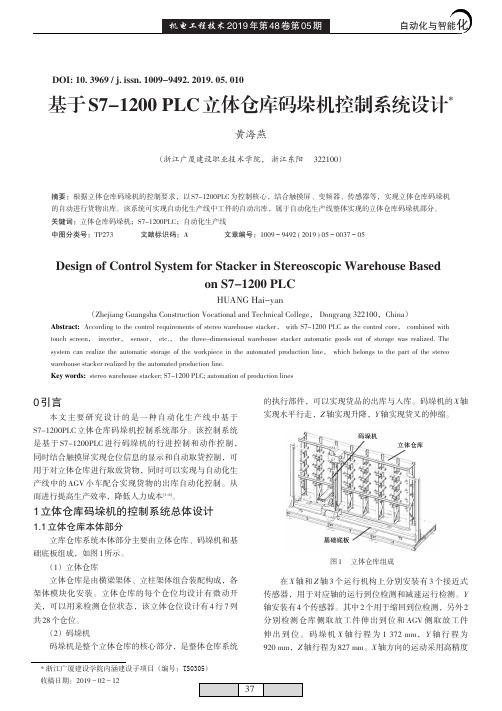
2.自动化立体仓库系统设计从图1可看出自动化立体仓库主要包括计算机控制系统、自动存取设备和高层货架三个部分,另外它还具有整合子系统收集整理信息等功能。
自动化立体仓库由多个环节综合而成,在多方面因素的相互作用下其过程相对复杂,因而构建自动化立体仓库,首先需了解各个组成部分的特性和相互作用。
计算机控制系统即人机交互界面,通过它操作人员可对立体仓库的运作进行控制和监视,另外货物存储和物流作业安排都是由控制系统负责;高层货架与传统的货架区别在于利用货物的层叠扩展和延伸储存空间,科学有序的安置不仅使得货物分类明确,同时也降低了管理难度;自动存取设备是执行任务的主要工具,作为仓储作业的主要劳动力,它决定了物流仓储的工作效率,提高立体仓库运行效率的关键就在此。
基于PLC的全自动包装码垛生产线控制系统设计
基于PLC 的全自动包装码垛生产线控制系统设计李蓉娟1,吴新伟2(1.内蒙古机电职业技术学院,内蒙古呼和浩特010070;2.内蒙古电力建设工程有限公司,内蒙古包头014030)摘要:为了提高食盐、粮食、化肥等颗粒物料的包装、运输以及库房码垛效率,提高企业生产效率,降低工人劳动强度。
根据全自动包装码垛生产线工艺流程并秉持该自动生产线应具有操作简单、稳定运行以及方便维修等特点,设计了一套基于PLC 的全自动包装码垛生产线控制系统。
控制系统核心采用西门子PLC S7-300CPU315-2DP 与数字输入SM321、数字输出SM322等模块相组合的方式实现对包装生产线全自动控制,上位机采用维纶MT8150iE 触摸屏对整个包装生产线的运行状态进行监测与控制。
在完成硬件选型的基础上,对控制系统主程序以及人机交互界面进行了软件编程,成功实现了该生产线的高速稳定运行。
结果表明:该控制系统具有稳定性强、成本低以及可编程能力强等优点,大大提高了包装、运输以及码垛效率,显著提高了企业自动化程度。
关键词:全自动包装码垛生产线;PLC ;上位机;触摸屏中图分类号:TB486.3文献标识码:A文章编号:1001-7119(2017)07-0167-04DOI:10.13774/ki.kjtb.2017.07.038Design of Automatic Packaging and Palletizing Line Control System Based on PLCLi Rongjuan 1,Wu Xinwei 2(1.Mechanical and Electrical Vocational and Technical College of Inner Mongolia ,Inner Mongolia Huhehaote 010070,China ;2.Inner Mongolia Electric Power Construction Engineering Co.,Ltd.,Baotou Inner Mongolia014030,China )Abstract :In order to improve salt,grain,fertilizer and other granular materials packaging,transportationand warehouse stacking efficiency,improve production efficiency and reduce labor intensity.According to the process of the automatic packing and palletizing line and uphold the automatic production line should have the characteristics of simple operation,stable operation and convenient maintenance,design a control system based on PLC in the automatic packing and palletizing line.Control system is the core ofSiemens PLC S7-300CPU315-2DP and digital input SM321,the combination of digital output SM322module realization of packaging production line automatic control,PC using vinylon MT8150iE touch screen on the whole package production line operation state monitor and plete selection of hardware based on the main program,and human-computer interaction interface of the control system for software programming,the successful implementation of the high-speed and stable operation of the line.The control system has advantages of strong stability,low cost and programming ability strongly,can greatly improve the packaging,transportation and stacking efficiency,significantly improve the automation degree of the enterprise.Keywords :automatic packaging palletizing production line ;PLC ;PC ;touch screen收稿日期:2016-08-19作者简介:李蓉娟(1983-),女,讲师,硕士学位,主要研究方向:自动控制、电力自动化。
基于S7-1200PLC立体仓库码垛机控制系统设计分析
基于S7-1200PLC立体仓库码垛机控制系统设计分析发布时间:2021-09-15T08:07:38.735Z 来源:《科技新时代》2021年6期作者:赖孔春[导读] 还可以在自动化生产过程中,配合AGV小车,控制货物自动化出库,优化综合生产效率。
深圳吉兰丁智能科技有限公司(518102)+摘要:文章先分析了立体仓库码垛机控制系统综合设计,包括立体仓库本体、电气控制部分,随后介绍了体仓库码垛机控制系统相关硬件设计,包括PLC选型、硬件设计、变频器选择,最后分析了立体仓库码垛机控制系统的软件设计和实现,包括系统运行控制和定位控制实现,希望能给相关人士提供有效参考。
关键词:立体仓库;码垛机;控制系统;硬件设计引言:此次主要研究了自动化生产线内以S7-1200PLC为基础的立体仓库码垛机控制系统,此控制系统能够借助S7-1200PLC控制码垛机的具体动作操作以及行进操作,同时借助触摸屏准确显示仓位信息,能够控制自动取货,应用到立体化仓库中进行货物取放,还可以在自动化生产过程中,配合AGV小车,控制货物自动化出库,优化综合生产效率。
一、立体仓库码垛机控制系统综合设计(一)立体仓库本体立体仓库系统对应本体部位主要包括基础底板、码垛机以及立体仓库等部分组成。
第一是立体仓库,其主要是通过立柱架体以及横梁架体等部件装配组成,不同架体能够实施模块化安装。
而立体仓库内各个仓位全部设置了微动开关,能够对仓位状态进行合理检测。
码垛机属于立体仓库内核心部件,同时也是仓库系统内对应执行元件,能够顺利实现货品入库和出库操作。
码垛机对应X轴主要是水平行走,Z 轴进行升降,而Y轴能够促进货叉伸缩。
在X、Y、Z三种运行机构中,分别设置三种接近式传感器,用来检测对应轴中的运行状态以及减速运行检测。
并在Y轴中设置4个传感器。
其中两个传感器用于回缩到位检测,此外两个分别检测仓库侧的工件取放是否伸出到位,以及AGV侧工件取放是否伸出合理。
基于PLC的全自动码垛机电气控制系统中的设计

在基于PLC的全自动洗衣机系统中,控制算法是核心部分。本系统的控制算 法主要包括以下几个部分:
1、输入输出信号:PLC通过输入接口接收用户指令和传感器信号,将输出信 号传递给电机、水泵和电磁阀等设备,实现对洗衣机的控制。
2、程序逻辑:PLC程序采用顺序控制的方式,按照洗涤、漂洗和脱水的顺序 进行控制。在每个阶段,程序逻辑根据输入的信号和预设的算法参数,控制相应 的设备实现预期的功能。
3、具有良好的扩展性,方便后 期进行技术升级和功能扩展。
在具体设计时,我们需要根据实际的输入输出点数、电源容量等因素进行选 型,并确定相应的硬件配置和接线方式。同时,我们还需要编写相应的控制程序, 实现设备的自动化控制。
程序编写
在全自动码垛机电气控制系统中,PLC控制程序的编写至关重要。程序的设 计思路和编写方法将直接影响设备的运行效果和稳定性。以下是一个简单的程序 编写示例:
(1)洗涤程序:按照设定的洗涤时间和水位,启动电机和水泵,根据洗涤 过程的不同阶段,控制电磁阀的开关状态,完成洗涤程序。
(2)漂洗程序:在洗涤程序结束后,进行漂洗程序。通过控制电磁阀和水 泵,实现水位的调整和漂洗效果的优化。
(3)脱水程序:漂洗程序结束后,启动电机进入脱水程序。PLC根据设定的 时间控制电机的运转,同时监测洗衣机的振动和声音,防止因脱水不平衡导致的 洗衣机损坏。
结论
基于PLC的全自动码垛机电气控制系统在现代化的工业生产中具有广泛的应 用价值。通过PLC的控制和管理,能够实现设备的自动化运行和智能化管理,提 高生产效率和降低成本。该系统具有较好的稳定性和扩展性,方便后期进行升级 和维护。因此,基于PLC的全自动码垛机电气控制系统将在未来的工业发展中发 挥越来越重要的作用。
总之,基于PLC的全自动包装码垛生产线控制系统设计对于提高企业的生产 效率和产品质量具有重要意义。通过PLC的控制和应用,可以实现生产线的自动 化、智能化和高效化,降低劳动成本和能源消耗,提高企业的经济效益和社会形 象。随着科技的不断发展,相信未来全自动包装码垛生产线控制系统将会在更多 领域得到应用和发展。
基于PLC的全自动包装码垛生产线控制系统设计论文

摘要传统的机械设备与产品,多是以机械为主,是电气、液压或气动控制的机械设备。
随着工业水平的不断发展,机械设备己逐步地由手动操作改为自动控制,设备本身也发展成为机电一体化的综合体。
可编程控制器(PLC)是以微处理器为核心,综合计算机技术、自动化技术和通信技术发展起来的一种新型工业自动控制装置。
经过30多年的发展,目前,可编程控制器已成为工业自动化领域中最重要、应用最多的控制装置,己跃居工业生产自动化四大支柱(可编程控器、数控机床、机器人、计算机辅助设计与制造)的首位。
其应用的深度和广度已成为衡量一个国家工业先进与自动化程度高低的标志。
本论文共分四章,从可编程控器(PLC)基础到整个系统的规划设计,以及PLC 控制系统的硬件、软件的开发,给出全面、详细的设计思路。
该系统的核心部分是包装码垛自动生产线的控制系统,其控制系统主要是以可编程控制器(PLC)为基础进行集成控制的。
全自动包装码垛生产线主要应用于化工、粮食、食品及医药等行业中的粉、粒、块状物料(如塑料、化肥、合成橡胶、粮食等)的全自动包装,即对包装过程中的称重、供袋、装袋、折边、封袋、倒袋整形、批号打印、检测、转位编组、码垛、托盘和垛盘的输送等作业全部实现自动化。
以PLC为基础的全自动包装码垛生产线,控制系统简单、便于维护、适应性强,自动化程度高,节约人力,可极大提高生产效率。
关键词:PLC;控制系统;包装码垛自动生产线AbstractThe traditional mechanical device and the product, many are by the machinery primarily, is electrical, the hydraulic pressure or the pneumatic control mechanical device. Along with the industry level's unceasing development, mechanical device oneself changes the automatic control gradually by the manual operation, the equipment itself also develops into the integration of machinery complex compound. Programmable controller (PLC) is take the microprocessor as a core, the comprehensive computer technology, the automated technology and the communication develop one new industry automatic control device. After more than 30 years development, at present, the programmable controller has become in the industrial automation domain to be most important, to apply most control devices, oneself leaps to the industrial production automation four big props (programmable controller, numerically-controlled machine tool, robot, computer-aided design and manufacture) the first place. Its application's depth and the breadth have become weigh a national industry to be advanced and automaticity height symbol.This thesis consists of four chapters, from the programmable logic controller (PLC) based planning and design of the entire system, and PLC control system hardware, software development, give full and detailed design ideas. The core of the system is Palletizing automatic production line control system, the control system is mainly based on programmable logic controller (PLC) as the basis for integrated control.Automatic Palletizing production line is mainly used in chemical, food, food and pharmaceutical industries in the flour, grain, bulk materials (such as plastics, fertilizers, synthetic rubber, food, etc.) of the automatic packaging, ie packaging process weight for bags, bagging, folding, envelope, plastic bags down, batch printing, testing, transfer grouping, stacking, pallets, and stack operations such as disk full automated transmission. With PLC based fully automatic palletizing packaging production line, control system is simple, easy maintenance, strong adaptability, high automation, saving manpower, can greatlyincrease productivity.Key word:PLC;Control System;Palletizing automatic production line目录第1章绪论 (1)1.1 PLC的产生和发展、优点、应用现状和发展趋势 (1)1.2 包装码垛自动生产线的发展 (4)1.3 课题主要研究容 (5)第2章包装码垛自动生产线机械系统的工作原理 (6)2.1 概述 (6)2.2 包装码珠自动生产线系统组成 (6)第3章包装码垛自动生产线PLC控制系统设计 (10)3.1 PLC的基本结构 (10)3.2 PLC的主要组成部分 (11)3.3 PLC的工作原理 (12)3.4 PLC控制系统设计 (13)第4章程序调试 (36)4.1 程序输入和编辑 (36)4.2 梯形图逻辑测试 (37)4.3 监控程序 (38)4.4 监控元件 (39)4.5 退出PLC仿真运行 (41)结论 (42)参考文献 (43)致 (44)第1章绪论可编程控制器是在计算机技术、通信技术和继电器控制技术的基础上发展起来的,最初叫做可编程逻辑控制器(Programmable Logic Controller),即PLC,现已广泛应用于工业控制的各个领域。
基于PLC控制的全自动码垛装置设计
2023年 / 第7期 物联网技术1310 引 言钢管的码垛是钢管出厂前的最后一道工序,钢管码垛设备将多根钢管按照规则的形状堆叠码垛在一起。
现有的钢管码垛设备中,电磁吸盘是通过固定的导轨及升降机构驱动,将钢管吸取后随着导轨及升降机构运送,随后电磁吸盘将钢管码垛在一起[1]。
然而,当钢管的形状或管径变化后,需要调整导轨及升降机构的运送路径以适应新的钢管结构,造成切换不同种类钢管生产时的效率低下[2]。
与此同时,对于实现钢管生产线的自动化,提高生产效率,钢管自动码垛装置成为钢管生产线上必不可少的装置之一。
市面上还有一种情况是:将大量钢管沿供管台移动直接滚落到与供管台有一定落差的六边形成型框架中,经过人工微调后将钢管捆成六角形捆。
但钢管从供管台掉落至成型框中会产生一定碰撞,造成钢管表面损伤;同时掉落不到位还需要人工微调,浪费劳动力,增加人工成本。
我国钢铁产品出口量快速增长的同时,钢铁企业也面临着激烈的市场竞争。
钢管码垛的方法有很多,但是主要特点就是需要人工数量较多、人工劳动强度高、码垛速度慢,从而造成生产成本高、生产速度慢,进而影响企业的效益。
近些年有一些企业研制出了钢管码垛成型设备,但是这些成型设备存在着生产及维护成本较高、操作复杂等缺陷。
因此,为了顺应国家“十四五”规划中制造业的改革升级目标,解决钢管在码垛时易受损伤和劳动力浪费的问题[3],本文设计了一款适用多种型号冷轧无缝钢管的个性化全自动码垛装置。
1 系统总体设计1.1 控制要求由伺服电机[4]与转轴相连接,带动传送带将钢管向前输送,依靠前方止落架使钢管停止运动;承载着立柱码垛机械臂的平台通过底部地轨中的齿轮传动与链传动实现整个码垛部分的运动;横梁和夹具由电机与滚珠丝杠传动机构带动,实现空间位置的改变;由气缸[5]、电机与滚珠丝杠传动机构组成的三维运动装置实现抓头空间位置的微调,进而应对不同情况下的抓取任务;码垛架其中一侧的框架由电机与滚珠丝杠控制,实现整个码垛架在长度与宽度上的改变,以适应不同要求的钢管码垛。
基于PLC的全自动包装码垛生产线控制系统设计
基于PLC的全自动包装码垛生产线控制系统设计摘要:随着全球化和市场竞争日益激烈,生产企业对提高生产效率和降低人工成本有着越来越高的需求。
本文介绍了一种,旨在援助生产企业实现自动化生产和提升生产效率。
一、引言随着科学技术的不息进步,自动化技术在生产领域中得到了广泛应用。
传统的包装码垛生产线通常依靠人工操作,存在效率低下、人工成本高等问题。
因此,开发一种基于PLC的全自动包装码垛生产线控制系统具有重要意义。
二、PLC系统概述PLC(Programmable Logic Controller)又称可编程控制器,是一种特殊的计算机,广泛应用于工业自动化控制系统中。
它包含了输入模块、输出模块、中央处理器和程序存储器等组件。
PLC可以依据程序逻辑进行运算,实现对工业生产过程的精确控制。
三、全自动包装码垛生产线控制系统设计(一)系统架构设计全自动包装码垛生产线控制系统设计包括硬件和软件两个方面。
硬件方面,系统包括传感器、执行器、PLC等设备;软件方面,系统包括PLC程序设计和人机界面设计。
(二)传感器设计为了实现全自动化控制,对于包装码垛生产线来说,需要安装多种传感器,如光电传感器、靠近传感器等。
通过这些传感器可以实现对物料的检测和定位,以便进行后续的包装和码垛操作。
(三)执行器设计包装码垛生产线中的执行器主要用于控制物料的输送、包装和码垛。
依据生产线的实际状况,可以选择气缸、马达等不同类型的执行器,并通过PLC控制其运动。
(四)PLC程序设计PLC程序设计是全自动包装码垛生产线控制系统的核心。
在设计程序时,起首需要依据生产线的实际状况确定输入和输出信号,然后编写相应的逻辑控制程序。
控制程序可以实现物料的输送、包装和码垛等功能。
(五)人机界面设计人机界面是生产线操作人员与PLC系统之间的交互通道。
通过合理设计人机界面,可以便利操作人员监控和控制整个生产线的运行状态,实现生产过程的可视化管理。
四、系统实施与试验结果为了验证全自动包装码垛生产线控制系统的可行性和有效性,我们设计了一个试验平台,并进行了一系列试验。
基于西门子PLC的码垛实训平台开发

基于西门子PLC的码垛实训平台开发随着工业自动化的快速发展,PLC控制技术在生产过程中的应用也日益广泛。
码垛是一种常见的自动化操作,特别是在物流和仓储领域中,大大提高了工作效率和准确性。
本文将介绍一个基于西门子PLC的码垛实训平台的开发,旨在为学生提供一个真实的实践环境,帮助他们掌握PLC控制技术和码垛操作。
码垛实训平台主要由物料输入系统、运动控制系统、感知检测系统和控制系统等组成。
物料输入系统用于将需要码垛的物料送到指定位置,一般采用传送带或者机械臂等设备。
运动控制系统负责控制码垛机械臂的运动轨迹和速度。
感知检测系统用于感知并检测码垛过程中的物料位置和高度,一般采用激光传感器或者视觉系统等设备。
控制系统则采用西门子PLC作为核心控制器,负责整个码垛系统的运行和协调。
在开发码垛实训平台之前,首先需要对PLC的基本原理和编程方法进行学习和培训。
学生需要了解PLC的硬件组成、输入输出模块的用途和配置,以及PLC的工作原理和编程语言等。
通过实际的实验和案例分析,加深学生对PLC的理解和应用能力。
在开发码垛实训平台时,需要考虑以下几个关键问题。
首先是物料的识别和定位问题。
为了实现自动码垛,需要通过激光传感器或者视觉系统等设备对物料进行识别和定位,确保物料能够准确地放置在指定位置。
其次是运动轨迹的规划和控制问题。
码垛机械臂的运动轨迹需要根据物料的尺寸和堆码要求进行规划,通过PLC控制器实现运动的连续和准确。
最后是安全控制和故障处理问题。
在操作过程中,需要考虑安全保护措施,避免发生意外事故。
还需要设计合理的故障处理流程,保证系统的稳定性和可靠性。
开发完整的码垛实训平台需要综合运用机械、电子、自动化控制和计算机等多个领域的知识。
通过设计和实现一个真实的码垛系统,学生可以在实践中学习和应用相关的专业知识,同时培养工程实践能力和团队合作精神。
基于西门子PLC的码垛实训平台的开发对于学生的学习和实践具有重要意义。
该实训平台可以提供一个安全、可靠和真实的实践环境,帮助学生掌握PLC控制技术和码垛操作,提高他们的综合能力和就业竞争力。
基于S7-1200PLC立体仓库码垛机控制系统设计
0 引言
本文主要研究设计的是一种自动化生产线中基于 S7-1200PLC 立体仓库码垛机控制系统部分。该控制系统 是基于 S7-1200PLC 进行码垛机的行进控制和动作控制, 同时结合触摸屏实现仓位信息的显示和自动取货控制,可 用于对立体仓库进行取放货物,同时可以实现与自动化生 产线中的 AGV 小车配合实现货物的出库自动化控制。从 而进行提高生产效率,降低人力成本[1-6]。
的自动进行货物出库。该系统可实现自动化生产线中工件的自动出库,属于自动化生产线整体实现的立体仓库码垛机部分。
关键词:立体仓库码垛机;S7-1200PLC;自动化生产线
中图分类号:TP273
文献标识码:A
文章编号:1009-9492 ( 2019 ) 05-0037-05
Design of Control System for Stacker in Stereoscopic Warehouse Based on S7-1200 PLC
电气控制部分主要电气元件有 PLC 及其扩展单元、触 摸屏、变频器,以及其他一些辅助电气元件等组成,如图 2 所示。
图 2 立体仓库电气控制部分
触摸屏:人机界面,用于人机交互。可直观显示系统 信息,并可通过其设定系统运行参数,给 PLC 发送指令等 等。
PLC:系统控制器,用于控制整个系统的协调运行。 PLC 扩展单元:扩展输入单元,将外部数字量信号按 钮 PID1、PID2、PID3、接近开关等接入至 PLC。 变频器:3 个变频器 U1、U2、U3,分别控制码垛机 3 个轴 X 轴、Y 轴、Z 轴的电动机的运行。 按 钮 和 指 示 灯 标 识 含 义 : SA1- 联 机/单 机 、 HL1- 报 警、HL2-急停、SB1-启动;SB2-停止;SB3-急停。 其他电气元件及附件:交换机 HUB1、开关电源、端 子排、连接器、继电器、接触器、滤波器、断路器、按钮 开关、急停开关等部分组成整个控制系统的电气回路。 该部分为立体仓库单元的本体设计和电气控制的总体 设计,主要实现本体部分的机械设计和电气控制功能设 计。
基于S7—300PLC的码垛机器人智能工作站

基于S7—300PLC的码垛机器人智能工作站本文研究了更加智能化、人性化的码垛机器人智能工作站。
一方面充分利用码垛机器人精度高的优点,搭配末端执行器实现抓取动作,另一方面,配套西门子S7-300PLC进行逻辑判断和数据分析,提高运行的效率,缩短控制系统的响应时间,并采用西门子触摸屏作为人机交互界面,实时显示工作站的工作状态,使参数的设置更加便捷,操作更加人性化,提高机器人对产品的适应性。
标签:码垛机器人;S7-300PLC;触摸屏;智能工作站1 引言中国工业机器人市场规模不断扩大[1],应用于码垛、喷涂和分拣等行业。
近年在柔性化生产的背景下,品种的多样化对码垛机器人动作提出了更高的要求。
为解决这一问题,本研究构建了基于西门子S7-300PLC的码垛机器人智能工作站,将PLC的逻辑运算功能与码垛机器人的高精度结合起来,并配备人机交互界面,经调试该工作站可以有效的提高码垛机器人生产线的智能性和操作性[2]。
2 智能工作站设计要求本智能工作站包括产品输送带、托盘输送带、产品暂存区、码垛抓取区、托盘放置区和机器人工作区六个区域,各部分自动配合。
产品输送带分为A、B两条,可以同时生产两种不同规格的产品,并且满足预期的生产速度。
通过人机交互界面控制两条输送带的工作状态和产品的切换。
码垛机器人根据预设位置和轨迹运行执行码垛动作。
3 硬件設计智能工作站的總体控制结构如图1所示,码垛机器人选用库卡KR QUANTEC PA中负载级卸码垛机器人,具有速度快、精度高、动态性能好的优点。
西门子S7-300PLC为控制系统的核心,负责数据的采集和逻辑判断,并发送相应的控制信号。
人机交互界面选用西门子MP277,在触摸屏上实现品种的切换和实时状态的监控。
现场检测设备检测产品的位置和数量,现场信号采集到S7-300PLC中。
现场执行机构为电机和气缸,电机控制辊子输送带,气缸控制产品的走向。
码垛机器人和S7-300PLC间通过PROFIBUS DP通讯,将S7-300PLC配置为DP主站,码垛机器人为DP从站,PLC将选择的品种和码垛方法传送给码垛机器人,码垛机器人根据信号运行不同的轨迹完成相应的码垛动作。
基于PLC控制的全自动码垛机系统研究
基于PLC控制的全自动码垛机系统研究作者:赵素玲来源:《科技视界》2018年第35期【摘要】随着技术的发展,工业机器人取代人工作业,已成为社会科技进步发展的主流目的。
码垛机是取代人工搬运的现代化机器,它可以提高码垛效率,减少工人数量,节约人力成本。
【关键词】全自动码垛机;变频器;光电传感器中图分类号: TH246 文献标识码: A 文章编号: 2095-2457(2018)35-0147-002DOI:10.19694/ki.issn2095-2457.2018.35.062Research on Automatic Stacker System Based on PLC ControlZHAO Su-ling(Suzhou Jianxiong Vocational and Technical College Zhongde Engineering College,Taicang Jiangsu 215411)【Abstract】With the development of technology,industrial robot has become the main purpose of the development of social science and technology.Stacker is a modern machine that replaces manual handling.It can improve the stacking efficiency,reduce the number of workers,and save manpower costs.【Key words】Automatic stacker;Inverter;Photoelectric sensors0 前言各行业常用的码垛机主要有低位码垛机、自动码垛机、码垛机器人、机械手码垛机、机器人堆垛机、机器人码垛机和码垛机械手等几大类。
基于西门子PLC的码垛实训平台开发
基于西门子PLC的码垛实训平台开发
首先,该实训平台主要由组成如下的两个模块,即PLC系统和码垛控制系统。
PLC系
统主要由PLC主机、输入输出模块、人机交互接口等组成,而码垛控制系统主要包括电机、电磁阀、气缸等元器件。
两个系统之间通过以太网连接,实现实时数据传输和控制。
其次,为了更好地实现码垛操作,该实训平台应该具有以下特点:
1.以PLC作为核心控制器,稳定可靠。
西门子PLC控制器具有可靠性高、扩展性强的
特点,同时PLC编程简单易懂,非常适合教学使用。
2.具备良好的人机交互界面和实时监控能力。
实训平台可通过人机接口实现对码垛操
作的设定和监控,同时开发实用的监控软件,形象化地显示设备运行状态,方便学生学习
和调试。
3.系统具备良好的安全保护措施。
在设计实训平台时,必须保证电气、机械等均符合
国家标准要求,同时安装各种安全检测、维护装置,如防护栏、急停开关、电磁阀等,确
保操作安全。
最后,基于该实训平台,学生将能够习得以下技能:
1.学习PLC编程技能,如指令的编写及程序的调试。
2.掌握各种传感器和执行器的使用和操作原理,如红外传感器、气缸、电机等。
3.了解码垛的操作流程,包括输入、堆垛及输出等步骤。
通过以上的学习,学生能够逐步掌握码垛操作并增强对自动化机械的掌握能力,提高
自身的竞争力。
同时,设计和开发这样的实训平台,有助于培养学生的工程实践能力和创
新精神,为他们今后的工作打下坚实的基础。
基于西门子PLC的码垛实训平台开发
基于西门子PLC的码垛实训平台开发随着工业自动化的不断发展,PLC(Programmable Logic Controller,可编程逻辑控制器)作为工业控制领域的重要设备,被广泛应用于生产线上的各种自动控制系统中。
码垛系统是工业自动化领域中的一个重要应用,它能够实现对产品的自动分拣和堆垛,提高了生产效率和产品质量。
本文将介绍一种基于西门子PLC的码垛实训平台开发。
一、引言码垛系统是一种用于对产品进行分拣和堆垛的自动化设备,它能够以较高的速度和准确度完成这些操作。
在实际工业生产中,码垛系统通常由PLC控制器、传感器、执行机构等组成,通过对产品的识别和控制,实现自动化的分拣和堆垛。
对于工程技术类学生来说,学习和掌握码垛系统的原理和应用非常重要。
基于这一需求,我们开发了一种基于西门子PLC的码垛实训平台,旨在帮助学生更好地理解和掌握码垛系统的工作原理和调试方法。
下文将详细介绍这个实训平台的设计思路和功能特点。
二、设计思路1. 教学需求分析在设计实训平台之初,我们首先进行了对教学需求的分析,发现学生在学习码垛系统时普遍存在以下问题:对PLC编程不熟练、对传感器和执行机构的原理不了解、对码垛系统整体工作流程不清晰等。
我们确定了实训平台的设计目标:旨在帮助学生通过实际操作和编程,深入理解码垛系统的原理、掌握PLC编程技术、学会对传感器和执行机构进行调试和控制。
2. 设计理念基于上述分析,我们提出了实训平台的设计理念:以教学为导向,注重实践操作和编程训练。
在实训平台中,我们将提供完整的码垛系统实物模型,并配备各种传感器和执行机构,学生可以通过对实物模型的调试和控制,练习PLC编程和调试技能,深入理解码垛系统的工作原理和调试方法。
三、功能特点1. 实物模型实训平台中将提供完整的码垛系统实物模型,包括传送带、传感器、执行机构等。
学生可以通过实际操作,观察整个码垛系统的工作流程,加深对系统原理的理解。
2. PLC编程练习实训平台将配备西门子PLC控制器,学生可以通过软件对PLC进行编程,完成对码垛系统的控制和调试。
基于西门子PLC一体化实验平台的开发与设计
名称 I何训 机 1
i 』 R RAL K 4 7P WE UP L 0 O RS P l Y
12 软 件 配 置 _l 2
支 持 西 门子 P C 一 体 化 实 验 平 台 的 软 件 主 要 是 利 用 西 门 L 子 过 程 控 制 开 发 软件 及 人 机 组 态 应 用 软 件 ,这 对 很 好 地 学 习 和
教学上有两方面优势 : 一方 面 可 以 随时 更 换 不 同型 号 的 P C, L 能 让 学 生 了解 不 同型 号 P C 的特 点 。另一 方 面 可 以 随意 设 计 实 验 L 的 内容 , 以根 据 需 要 针 对 某 些工 业 控 制 设 计 相 应 的实 验 。 将 可 若
掌 握 自动 控 制 开 发 、 用 及 维 护 至 关 重要 。 应 工程 软件 具 体 配置 如
表 2所 示 。
表 2 工 程 软 件 配 置
’ _ ¨
本 文 就 是 结 合 高 职 院 校 自动 化 一 体 化 课 程 教 学 需 求 ,针 对 目前 P C实 验 平 台 的缺 点 , 用 西 门 子 P C 进 行 开 发 设 计 。本 L 利 L P C 一 化 实验 平 台有 效 配置 西 门 子 大 、 、 型 P C 资 源 , L 体 中 小 L 在
教 师科 研 的 需 求 。 关键词 : 体化 , 一 可编 程 控 制 器 , 实验 平 台
Absr c ta t
Fo t e r h prct e e hig f he a i tac n o t cous o PL c re f C i t e lc r l gi e ig r f s i a1 n ne a i & op ex r n h ee ti en ne rn P o e son . it gr t ca a on en pe i -
基于PLC的包装码垛机的控制系统设计.
毕业设计(论文)毕业设计(论文)题目:基于PLC的包装码垛机的控制系统设计分校(点):青浦年级、专业: 12秋机械电子工程教育层次:本科学生姓名:***学号: *********指导教师:***完成日期: 2014年12月11日目录内容摘要和关键词 (I)Abstract and Key words (II)文献综述 (III)一、系统整体设计 (1)(一)系统结构简介 (2)(二)总体方案设计 (4)二、控制系统软件设计 (5)(一)程序控制逻辑 (6)1. 自动供袋控制逻辑 (6)2.自动取袋控制逻辑 (7)3.倒袋、输送控制逻辑 (9)4.推袋、分层控制逻辑…………………………………………………………………105.升降机控制逻辑 (11)6.托盘和跺盘输送机控制逻辑 (12)7.托盘仓控制逻辑 (15)二、系统硬件电路计 (16)参考文献 (17)附录……………………………………………………………………………………20致谢 (21)内容摘要摘要1960年左右在美国出现了巷道式码垛机,随后巷道式码垛机逐渐替代了受重量和跨度限制的桥式码垛机。
在亚洲地区日本在1967年就安装了高层码垛机,并且在1969年研制出全自动化仓库,我国是在上世纪70年代初期开始研究采用巷道式码垛机的立体仓库。
目前的码垛机技术取得了重大的发展,控制技术、定位精度、运行速度都得到了很大程度的提高。
巷道式码垛机的起升和运行速度都比较快分别为90m/min2与40m/min,在有的立体仓库中使用巷道码垛机进行工作的方法主要是上下两层同时使用,这样能够提高工作效率。
包装码垛自动生产线的使用范围比较广泛,无论是在工业还是农业生产中都在使用。
它的主要特点是方便用户储存、运输、销售,全自动包装码垛生产线的组成部分主要包括自动定量包装机、自动上袋机组、封口系统、倒袋机、金属检测机、重量检验机、检选机、喷墨打印机、码垛机等。
在只安排少数工作人员的情况下只需要通过编程就可以实现对整个生产线工作过程的有效控制,生产线在工作过程中如果发生故障设备自己会通过声光进行报警。
基于plc控制的面粉码垛机设计大学毕设论文
毕业设计说明书设计题目: 基于PLC控制的面粉码垛机设计学生姓名学号专业班级指导教师目录摘要 (4)第1章绪论 (5)1.1课题的意义 (5)1.2课题的主要内容 (5)1.3任务分析及其要求: (6)1.4设计进度安排: (6)1.5设计方案的确定: (7)1.6本设计主要研究的内容: (9)第2章面粉码垛机的总体设计 (11)2.1码垛机器人的组成及各部分关系概述: (11)2.2码垛机械手的设计分析: (11)第3章码垛机抓取结构的设计分析 (15)3.1末端操作器的设计分析: (15)3.2码垛机手腕的设计分析: (15)3.3手臂的设计分析: (16)3.4机身和机座的设计分析: (18)第4章机械手各部件的载荷计算 (19)4.1 设计要求分析: (19)4.2 手指夹紧机构的设计: (19)4.3 手臂伸缩机构载荷的计算: (20)4.4 手臂俯仰机构载荷的计算: (22)4.5 机身摆动机构载荷力矩的计算: (22)4.6 初选系统工作压力: (23)第5章机械手各部件结构尺寸计算及校核 (25)5.1 手腕油缸尺寸的确定: (25)5.2 手臂伸缩机构结构尺寸的确定: (28)5.3 手臂俯仰机构结构尺寸的确定: (28)5.4 机身摆动机构的确定: (28)5.5 强度校核: (28)5.6 弯曲稳定性校核 (29)第6章液压系统的设计 (31)6.1 制定基本方案: (31)6.2 液压元件的选择: (32)第7章控制系统的设计 (38)7.1 控制系统方式选择 (38)7.2 PLC概述 (38)7.3 PLC选型及硬件配备 (39)7.4 输入输出地址分配 (39)可编程控制器的输入、输出接线图如图 (40)7.5电气控制系统线路设计 (40)结论 (42)参考文献 (43)致谢 (45)摘要随着现代科学技术的发展,机器人技术越来越受到广泛关注,在工业生产日益现代化的今天,机器人的使用变得越来越普及。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于西门子PLC的码垛实训平台开发作者:李磊田鹏勇侯超仇杰
来源:《科技风》2020年第07期
摘;要:针对机电一体化实训教学,设计了一套基于西门子S71200PLC的码垛实训平台。
将机械、PLC控制、人机交互、伺服驱动等技术有机融合。
该实训平台控制系统主程序设计采用了函数(Function,FC)和函数块(Function Block,FB)的形式,对各部分功能进行模块化,并对各模块的接口进行规划,简化了码垛程序结构。
使学生快速掌握复杂运动控制系统的设计开发、编程调试能力,有利于提高学生工程实践和创新能力。
关键词:S71200PLC;实训平台;喷涂码垛自动线;函数(块)
随着智能制造在自动化领域的不断深入发展,应用于喷涂、码垛等工艺的自动化生产线设备越来越多,且更趋于智能化、信息化和集成化。
喷涂码垛实训平台应用于机电类相关专业实训教学环节,旨在使学生们掌握机械、PLC应用、伺服控制、人机交互、通信等技术的基础理论和工程知识。
因此,开发了一套基于西门子PLC的码垛实训平台。
该平台模拟码垛工艺过
程,并根据教学实际进行了改进,使其具有较高的实用性、开放性和拓展性。
对提高该专业教学质量和培养学生实践和创新能力具有重要的意义。
1 码垛实训平台方案概述
实训平台机械部分由供料单元和码垛单元组成。
供料单元可以将工件定位在抓料位置,码垛单元通过各个轴的协同工作,将工件搬运到指定位置并码垛。
在进行試验平台控制系统编程时,由于工艺流程复杂,同学们在学习时若直接进行整个码垛系统上位机和下位机程序开发则难度较大,耗时较长。
所以下位机程序的设计采用函数(Function,FC)和函数块(Function Block,FB)的形式,对程序中各部分功能进行模块化,并对各模块的接口进行规划。
学生在练习编程时,通过对其中的一个或几个功能块进行编程,这种方式可以帮助同学们建立正确的程序结构,降低了难度,提高了编程效率[1,2]。
2 码垛实训平台硬件设计
2.1 实训平台机械结构
码垛实训平台由供料单元和码垛单元组成,结构图如下图1所示。
其中供料单元由料仓、顶料气缸、推料气缸、物料台等元件组成,两气缸按照顶料缸伸出推料缸伸出推料缸缩回顶料缸缩回的顺序动作,将工件推至物料台上,同时工件在重力作用下落下。
码垛单元是由直角坐标结构将X、Y、Z模组轴空间两两垂直固定组成[3-5]。
各轴由伺服电机驱动丝杠旋转,带动螺母直线往复运动。
在最底部模组轴平行方向设计有导轨滑块结构,以加强设备刚度。
2.2 控制系统组成
实训平台控制部分主要包括上位机触摸屏、PLC、被控对象(松下A6伺服驱动器、电磁阀等)和传感器等元件。
该实训平台PLC部分的I/O接线图如图2所示,PLC共有11个输入信号,分别为供料单元顶料气缸和推料气缸位置信号,物料到位检测信号;码垛单元X、Y、Z 三轴的原点信号,检测吸盘真空度传感器信号及启动、停止按钮信号及报警信号。
3 码垛平台软件设计
3.1 PLC控制流程设计
码垛实训平台的工艺流程主要包括:设置物料、垛型、速度等参数示教末端执行器抓、放料位置供料单元推出物料开始码垛码放完毕后回原点。
在使用TIA Portal V15软件编程时,利用结构化的程序编写形式有助于对程序功能的分解。
如图3所示,码垛实训台主程序结构由组织块OB1对各个函数或函数块进行嵌套和调用。
软件编程中使用的函数或函数块的功能、接口数据见表1。
3.2 上位机功能设计
本实训平台利用西门子KTP900触摸屏对整个码垛系统实现远程控制和实时监测[6-8]。
上位机功能主要由参数设置界面、自动调试界面及报警信息显示、确认等功能组成。
如图4所示,在开始码垛之前,需要对码放物料尺寸、码垛参数通过HMI设计界面(如图4.a所示)进行设置并传送至PLC相应存储区间。
通过运行界面(如图4.b所示)启动或停止工作。
4 实训平台项目开发
利用该实训平台可进行机械设计、电气系统设计及PLC和HMI编程设计的实训项目的开发,下面将设备典型实训项目列举见表2:
5 结语
本文设计的基于TIA Portal V15编程环境的码垛实训平台,可应用于包括机械项目设计、PLC技术、人机交互技术、伺服技术等试验课程。
另外,该实训平台可拓展功能,如对多种规格物料码垛算法的开发,或利用VC、Labview等软件代替HMI进行上位机程序开发等项目。
该实训平台充分集成了常用的工控技术,具有较高的实用性、开放性和拓展性,对培养学生工程实践和创新能力具有重要的意义。
参考文献:
[1]胡洪国,高建华,杨汝清.码垛技术综述[J].组合机床与自动化加工技术,2000(6):7-9.
[2]李坤全,邵凤翔.全自动包装码垛机器人控制系统设计[J].机械设计与制造,2017(4):259-262.
[3]付铁,李金泉,陈恳,等.一种新型高速码垛机械手的设计与实现[J].北京理工大学学报,2007,(1):17-20.
[4]李海波,房曙光.基于PLC与HMI的码垛实训仿真控制系统开发[J].实训室研究与探索,2018,37(12):129-132.
[5]肖艳军,李磊,周婧,等.基于PLC的自动续料机械手[J].机械设计与制造,2011(2):152-154.
[6]张建新,李磊.移动式数控火焰切割机料架研制[J].制造技术与机床,2016,12(5):149-152.
[7]张丰华,韩宝玲,罗庆生,等.基于PLC的新型工业码垛机器人控制系统设计[J].计算机测量与控制,2009,17(11):2191-2193.
[8]廖常初.S7-1200PLC技术应用[M].北京:机械工业出版社,2018.
基金项目:天津市企业科技优秀特派员项目(18JCTPJC52300);天津中德应用技术大学教学改革与建设项目城市轨道交通多专业联合仿真实训室建设方案(项目编号:ZDJY2019-03)
作者简介:李磊(1983-),男,河北邯郸人,硕士,讲师,主要从事机电液一体化技术方面的科研和教学工作。