人工智能实验二
人工智能实验2传教士过河问题
人工智能实验报告班级:计研-12班学号:2012312120105 姓名:孔德星实验二知识表示方法1.实验目的(1)了解知识表示相关技术;(2)掌握问题规约法或者状态空间法的分析方法。
2.实验内容(2个实验内容可以选择1个实现)(1)梵塔问题实验。
熟悉和掌握问题规约法的原理、实质和规约过程;理解规约图的表示方法;(2)状态空间法实验。
从前有一条河,河的左岸有m个传教士、m个野人和一艘最多可乘n人的小船。
约定左岸,右岸和船上或者没有传教士,或者野人数量少于传教士,否则野人会把传教士吃掉。
搜索一条可使所有的野人和传教士安全渡到右岸的方案。
3.实验报告要求(1)简述实验原理及方法,并请给出程序设计流程图。
实验原理:假设开始时传教士、野人和船都在右岸,用数组(a,b,c)分别表示右岸传教士个数、右岸野人个数、船的位置,则可分为三种情况讨论:A、n>m/2。
此种情况下,先把所有的野人度过去,每次返回一个野人,当出现(m,0,0)情况时,返回m-n个野人(若m==n,返回1个野人)。
然后渡n个传教士,此时野人==传教士,然后返回一个野人和传教士,再开始最大限度的渡传教士,每次返回一个野人,最终直到a==b==c==0;B、n<=3&&n<=m/2 || n==1,显然此时无解;C、n>=4&&n<=m/2,此时只能每次传n/2个传教士和野人,每次返回一个野人和传教士,直到最终结果。
程序流程图:(2)源程序清单:本程序用C++语言编写。
#include"iostream"using namespace std;bool flag = false; //标记是否有解bool af = false; //标记a是否为0bool bf = false; //当b变为0后赋值为true;bool ef = false; //当a==b后赋值为truebool f = false; //判断n是否大于m/2int m;//传教士野人的个数int n;//船一次能装载的人数void mc(int a,int b,int c);int main(){cout<<"传教士与野人过河问题。
《人工智能》实验报告

一、实验目的1. 了解机器学习的基本概念和常用算法。
2. 掌握使用Python编程语言实现图像识别系统的方法。
3. 培养分析问题、解决问题的能力。
二、实验环境1. 操作系统:Windows 102. 编程语言:Python3.73. 开发工具:PyCharm4. 机器学习库:TensorFlow、Keras三、实验内容1. 数据预处理2. 模型构建3. 模型训练4. 模型评估5. 模型应用四、实验步骤1. 数据预处理(1)下载图像数据集:选择一个适合的图像数据集,例如MNIST手写数字数据集。
(2)数据加载与处理:使用TensorFlow和Keras库加载图像数据集,并进行预处理,如归一化、调整图像大小等。
2. 模型构建(1)定义网络结构:使用Keras库定义神经网络结构,包括输入层、隐藏层和输出层。
(2)选择激活函数:根据问题特点选择合适的激活函数,如ReLU、Sigmoid等。
(3)定义损失函数:选择损失函数,如交叉熵损失函数。
(4)定义优化器:选择优化器,如Adam、SGD等。
3. 模型训练(1)将数据集分为训练集、验证集和测试集。
(2)使用训练集对模型进行训练,同时监控验证集的性能。
(3)调整模型参数,如学习率、批大小等,以优化模型性能。
4. 模型评估(1)使用测试集评估模型性能,计算准确率、召回率、F1值等指标。
(2)分析模型在测试集上的表现,找出模型的优点和不足。
5. 模型应用(1)将训练好的模型保存为模型文件。
(2)使用保存的模型对新的图像进行识别,展示模型在实际应用中的效果。
五、实验结果与分析1. 模型性能:在测试集上,模型的准确率为98.5%,召回率为98.3%,F1值为98.4%。
2. 模型优化:通过调整学习率、批大小等参数,模型性能得到了一定程度的提升。
3. 模型不足:在测试集中,模型对部分图像的识别效果不佳,可能需要进一步优化模型结构或改进训练方法。
六、实验总结通过本次实验,我们了解了机器学习的基本概念和常用算法,掌握了使用Python编程语言实现图像识别系统的方法。
《人工智能》实验报告

《人工智能》实验报告
一、实验目的
本实验旨在通过实际操作,加深对人工智能的理解,探索人工智能在不同领域的应用。
二、实验过程
1. 准备数据集:选取一个合适的数据集作为实验对象,确保数据质量和多样性。
2. 数据预处理:对选取的数据进行清洗、去噪和标准化等预处理操作。
3. 选择模型:根据实验要求,选择适合的人工智能模型,如神经网络、决策树等。
5. 模型评估:使用测试数据评估模型的性能指标,如准确率、召回率等。
6. 结果分析:对模型的性能进行分析和解释,提出改进意见。
三、实验结果
根据实验所选取的数据集和模型,得到了以下实验结果:
- 在测试数据集上,模型的准确率达到了 Y%。
- 模型的召回率为 Z%。
四、实验总结
通过本次实验,我更深入地了解了人工智能的工作原理和应用
方法,掌握了数据预处理、模型训练和评估的基本流程。
同时,也
发现了一些可以改进的地方,如增加数据集规模、尝试其他模型等。
这些经验对于今后的研究和实践具有重要意义。
五、参考文献
[1] 参考文献1
[2] 参考文献2
...。
人工智能实验2报告

北京联合大学实验报告课程(项目)名称:人工智能实验实验二 A*算法实验学院:自动化专业:自动化班级: 0910030206 学号:2009100302638 姓名:徐琪成绩:2012年11月18日实验二 A*算法实验一、任务与目的1.实验任务(1)分别以8数码和15数码为例实际运用A*算法。
(2)画出A*算法求解框图。
(3)分析估价函数对搜索算法的影响。
(4)分析A*算法的特点。
2. 实验目的(1)熟悉和掌握启发式搜索的定义、估价函数和算法过程。
(2) 利用A*算法求解N数码难题,理解求解流程和搜索顺序。
二、原理(条件)1.相关知识:(1) A*算法原理及实现方法。
(2) N数码问题求解方法。
2. 实验条件:安装了Windows 2000的计算机,安装了Visual C++。
三、内容与步骤1、在Visual C++中创建工程项目和源文件。
2、在Visual C++环境下完成代码的输入。
程序清单://八数码问题求解////本程序利用启发函数来实现A算法(实为A*算法),效率较高;////具体思想请参考人工智能相关书籍;////启发函数为深度+不在位数;////////////////////////////////////////////////////////////////////////////////////////////////////#include "stdio.h"#define NULL 0;int cbs[9]={2,8,3,1,6,4,7,0,5},cbg[9]={1,2,3,0,8,4,7,6,5},cbt[9]; //cbs,cbg为棋盘的初始布局和目标布局(可修改),并用中间状态cbt与之比较// cbs[9]、,cbg、,cbt数组表示棋盘各位置上放的棋子号,元素下标为棋盘位置,元素值为棋子号//定义棋盘状态的数据结构struct ChessBoardState{int pos[9];// pos[9]表示各棋子在棋盘上的位置,元素下标为棋子号,元素值为棋盘位置。
人工智能实验报告

实验一:知识表示方法一、实验目的状态空间表示法是人工智能领域最基本的知识表示方法之一,也是进一步学习状态空间搜索策略的基础,本实验通过牧师与野人渡河的问题,强化学生对知识表示的了解和应用,为人工智能后续环节的课程奠定基础。
二、问题描述有n个牧师和n个野人准备渡河,但只有一条能容纳c个人的小船,为了防止野人侵犯牧师,要求无论在何处,牧师的人数不得少于野人的人数(除非牧师人数为0),且假定野人与牧师都会划船,试设计一个算法,确定他们能否渡过河去,若能,则给出小船来回次数最少的最佳方案。
三、基本要求输入:牧师人数(即野人人数):n;小船一次最多载人量:c。
输出:若问题无解,则显示Failed,否则,显示Successed输出一组最佳方案。
用三元组(X1, X2, X3)表示渡河过程中的状态。
并用箭头连接相邻状态以表示迁移过程:初始状态->中间状态->目标状态。
例:当输入n=2,c=2时,输出:221->110->211->010->021->000其中:X1表示起始岸上的牧师人数;X2表示起始岸上的野人人数;X3表示小船现在位置(1表示起始岸,0表示目的岸)。
要求:写出算法的设计思想和源程序,并以图形用户界面实现人机交互,进行输入和输出结果,如:Please input n: 2 Please input c: 2Successed or Failed?: SuccessedOptimal Procedure: 221->110->211->010->021->000四、实验组织运行要求本实验采用集中授课形式,每个同学独立完成上述实验要求。
五、实验条件每人一台计算机独立完成实验。
六、实验代码Main.cpp#include<iostream>#include"RiverCrossing.h"using namespace std;//主函数void main(){RiverCrossing::ShowInfo();int n, c;cout<<"Please input n: ";cin>>n;cout<<"Please input c: ";cin>>c;RiverCrossing riverCrossing(n, c);riverCrossing.solve();system("pause");}RiverCrossing.h #pragma once#include<list>//船class Boat{public:static int c;int pastor;//牧师int savage;//野人Boat(int pastor, int savage);};//河岸状态class State{public:static int n;int iPastor;//牧师数量int iSavage;//野人数量int iBoatAtSide;//船所在河岸State *pPrevious;//前一个状态State(int pastor, int savage, int boatAtSide);int getTotalCount();//获得此岸总人数bool check();//检查人数是否符合实际bool isSafe();//检查是否安全State operator + (Boat &boat);State operator - (Boat &boat);bool operator == (State &state);};//过河问题class RiverCrossing{private:std::list<State*> openList, closeList;State endState;bool move(State *nowState, Boat *boat);//进行一次决策State* findInList(std::list<State*> &listToCheck, State &state);//检查某状态节点是否在列表中void print(State *endState);//打印结果public:static void ShowInfo();RiverCrossing(int n, int c);bool solve();//求解问题};RiverCrossing.cpp#include"RiverCrossing.h"#include<iostream>#include<stack>#include<algorithm>using namespace std;//类静态变量定义int State::n = 0;int Boat::c = 0;/*=========================Methods for class "Boat"=========================*/ Boat::Boat(int pastor, int savage){this->pastor = pastor;this->savage = savage;}/*=========================Methods for class "State"=========================*/ //构造函数State::State(int pastor, int savage, int boatAtSide){this->iPastor = pastor;this->iSavage = savage;this->iBoatAtSide = boatAtSide;this->pPrevious = NULL;}//获取此岸总人数int State::getTotalCount(){return iPastor + iSavage;}//检查人数是否在0到n之间bool State::check(){return (iPastor >=0 && iPastor <= n && iSavage >= 0 && iSavage <=n);}//按照规则检查牧师得否安全bool State::isSafe(){//此岸的安全:x1 == 0 || x1 >= x2//彼岸的安全:(n-x1) == 0 || (n-x1) >= (n-x2)//将上述条件联立后得到如下条件return (iPastor == 0 || iPastor == n || iPastor == iSavage);}//重载+符号,表示船开到此岸State State::operator+(Boat &boat){State ret(iPastor + boat.pastor, iSavage + boat.savage, iBoatAtSide + 1);ret.pPrevious = this;return ret;}//重载-符号,表示船从此岸开走State State::operator-(Boat &boat){State ret(iPastor - boat.pastor, iSavage - boat.savage, iBoatAtSide - 1);ret.pPrevious = this;return ret;}//重载==符号,比较两个节点是否是相同的状态bool State::operator==(State &state){return (this->iPastor == state.iPastor && this->iSavage == state.iSavage && this->iBoatAtSide == state.iBoatAtSide);}/*=======================Methods for class "RiverCrossing"=======================*/ //显示信息void RiverCrossing::ShowInfo(){cout<<"************************************************"<<endl;cout<<" 牧师与野人过河问题求解 "<<endl;cout<<" by 1040501211 陈嘉生 "<<endl;cout<<"************************************************"<<endl;}//构造函数RiverCrossing::RiverCrossing(int n, int c):endState(0, 0, 0){State::n = n;Boat::c = c;}//解决问题bool RiverCrossing::solve(){openList.push_back(new State(State::n, State::n, 1));while(!openList.empty()) {//获取一个状态为当前状态State *nowState = openList.front();openList.pop_front();closeList.push_back(nowState);//从当前状态开始决策if (nowState->iBoatAtSide == 1) {//船在此岸//过河的人越多越好,且野人优先int count = nowState->getTotalCount();count = (Boat::c >= count ? count : Boat::c);for (int capticy = count; capticy >= 1; --capticy) {for (int i = 0; i <= capticy; ++i) {Boat boat(i, capticy - i);if (move(nowState, &boat))return true;}}} else if (nowState->iBoatAtSide == 0) {//船在彼岸//把船开回来的人要最少,且牧师优先for (int capticy = 1; capticy <= Boat::c; ++capticy) { for (int i = 0; i <= capticy; ++i) {Boat boat(capticy - i, i);if (move(nowState, &boat))return true;}}}}print(NULL);return false;}//实施一步决策,将得到的新状态添加到列表,返回是否达到目标状态bool RiverCrossing::move(State *nowState, Boat *boat){//获得下一个状态State *destState;if (nowState->iBoatAtSide == 1) {destState = new State(*nowState - *boat);//船离开此岸} else if (nowState->iBoatAtSide == 0) {destState = new State(*nowState + *boat);//船开到此岸}if (destState->check()) {//检查人数if (*destState == endState) {//是否达到目标状态closeList.push_back(destState);print(destState);return true;//找到结果} else if (destState->isSafe()) {//检查是否安全if (!findInList(openList, *destState) && !findInList(closeList,*destState)) {//检查是否在表中//添加没出现过的状态节点到open表openList.push_back(destState);return false;}}}delete destState;return false;}//检查给定状态是否存在于列表中State* RiverCrossing::findInList(list<State*> &listToCheck, State &state){for (list<State*>::iterator ite = listToCheck.begin(); ite != listToCheck.end(); ++ite) {if (**ite == state)return *ite;}return NULL;}//根据达到的目标状态,回溯打印出求解过程void RiverCrossing::print(State *endState){cout<<"================================================"<<endl;if (!endState) {cout<<"Search failed!"<<endl;} else {cout<<"Search successed!"<<endl;cout<<"Optimal Procedure: "<<endl;State *pState = endState;stack<State*> st;//用栈将链表逆序,以便输出while (pState) {st.push(pState);pState = pState->pPrevious;}int count = 0;while (!st.empty()) {pState = st.top();st.pop();cout<<pState->iPastor<<","<<pState->iSavage<<","<<pState->iBoatAtSide;if (st.size() > 0)cout<<" -> ";if (++count % 5 == 0)//每五个步骤换行cout<<endl;}cout<<endl;cout<<"Total move: "<<count - 1<<endl;}cout<<"================================================"<<endl;}七、实验结果实验二:九宫重排一、实验目的A*算法是人工智能领域最重要的启发式搜索算法之一,本实验通过九宫重排问题,强化学生对A*算法的理解与应用,为人工智能后续环节的课程奠定基础。
人工智能实验报告
人工智能实验报告
一、实验介绍
人工智能(Artificial Intelligence,AI)是计算机科学的一个领域,以模拟或增强人类智能的方式来实现人工智能。
本实验是基于Python的人工智能实验,使用Python实现一个简单的语音识别系统,可以识别出句话中的关键词,识别出关键词后给出相应的回答。
二、实验内容
1.安装必要的Python库
在使用Python进行人工智能实验前,需要先安装必要的Python库,例如NumPy、SciPy、Pandas等。
2.准备必要的数据集
为避免过拟合,需要准备数据集并对数据进行分离、标准化等处理,以便为训练和测试模型提供良好的环境。
3.训练语音识别模型
使用Python的TensorFlow库训练语音识别模型,模型会自动学习语音特征,以便准确地识别语音输入中的关键词。
4.实现语音识别系统
通过训练好的语音识别模型,使用Python实现一个简单的语音识别系统,实现从语音输入中识别出句话中的关键词,并给出相应的回答。
三、实验结果
本实验使用Python编写了一个简单的语音识别系统,实现从语音输
入中识别出句话中的关键词,并给出相应的回答。
通过对训练数据集的训练,模型可以准确地识别语音输入中的关键词,对测试数据集的准确率达到了87.45%,表示模型的效果较好。
四、总结。
人工智能技术实验指导书
人工智能技术实验指导书实验背景本实验指导书旨在帮助学生深入了解人工智能技术的基础原理及应用方法。
通过本实验,学生将能掌握人工智能技术的基本概念、算法和编程技能,为未来在人工智能领域的研究和研究打下坚实基础。
实验目的本实验旨在培养学生的人工智能算法设计和编程能力,提高学生对人工智能技术的理解和应用能力。
实验内容实验一:人工智能算法基础- 研究人工智能算法的基本概念和分类;- 掌握常见的人工智能算法原理和实现方法;- 利用Python编程语言实现简单的人工智能算法。
实验二:机器研究算法实践- 掌握机器研究算法的基本原理和应用方法;- 研究使用机器研究库进行数据预处理和算法训练;- 利用已有数据集,实现一个简单的机器研究算法模型。
实验三:深度研究算法应用- 理解深度研究算法的基本原理和结构;- 研究使用深度研究框架进行神经网络模型的设计和训练;- 实现一个简单的深度研究算法应用案例。
实验要求- 学生应具备基本的编程能力,熟悉Python编程语言;- 学生应具备基本的数学和统计知识,对概率和线性代数有一定了解;- 学生应具备良好的逻辑思维能力和问题解决能力。
实验评估- 实验报告:学生需按要求书写并提交实验报告,内容包括实验目的、方法、实验结果和分析等;- 实验成绩:根据实验报告和实验结果,对学生的实验成果进行综合评估。
实验资源- 教材:提供相关的教材和参考书籍,供学生参考和研究;- 软件工具:提供相应的编程环境和开发工具,供学生进行实验操作和编程实现。
实验安排- 实验时间:本实验预计需要3周的时间完成;- 实验地点:学生可以自行选择合适的实验地点进行实验。
注意事项- 学生在进行实验时,应遵守实验室规定和安全操作流程;- 学生在编写实验报告时,应保证报告内容真实可信。
参考资料- 《人工智能导论》- 《机器研究实战》- 《深度学习》。
《人工智能》实验报告

《人工智能》实验报告人工智能实验报告引言人工智能(Artificial Intelligence,简称AI)是近年来备受瞩目的前沿科技领域,它通过模拟人类智能的思维和行为,使机器能够完成复杂的任务。
本次实验旨在探索人工智能的应用和局限性,以及对社会和人类生活的影响。
一、人工智能的发展历程人工智能的发展历程可以追溯到上世纪50年代。
当时,科学家们开始研究如何使机器能够模拟人类的思维和行为。
经过几十年的努力,人工智能技术得到了长足的发展,涵盖了机器学习、深度学习、自然语言处理等多个领域。
如今,人工智能已经广泛应用于医疗、金融、交通、娱乐等各个领域。
二、人工智能的应用领域1. 医疗领域人工智能在医疗领域的应用已经取得了显著的成果。
通过分析大量的医学数据,人工智能可以辅助医生进行疾病诊断和治疗方案的制定。
此外,人工智能还可以帮助医疗机构管理和优化资源,提高医疗服务的效率和质量。
2. 金融领域人工智能在金融领域的应用主要体现在风险评估、交易分析和客户服务等方面。
通过分析大量的金融数据,人工智能可以帮助金融机构预测市场趋势、降低风险,并提供个性化的投资建议。
此外,人工智能还可以通过自动化的方式处理客户的投诉和咨询,提升客户满意度。
3. 交通领域人工智能在交通领域的应用主要体现在智能交通管理系统和自动驾驶技术上。
通过实时监测和分析交通流量,人工智能可以优化交通信号控制,减少交通拥堵和事故发生的可能性。
同时,自动驾驶技术可以提高交通安全性和驾驶效率,减少交通事故。
三、人工智能的局限性与挑战1. 数据隐私和安全问题人工智能需要大量的数据进行训练和学习,但随之而来的是数据隐私和安全问题。
个人隐私数据的泄露可能导致个人信息被滥用,甚至引发社会问题。
因此,保护数据隐私和加强数据安全是人工智能发展过程中亟需解决的问题。
2. 伦理和道德问题人工智能的发展也引发了一系列伦理和道德问题。
例如,自动驾驶车辆在遇到无法避免的事故时,应该如何做出选择?人工智能在医疗领域的应用是否会导致医生失业?这些问题需要我们认真思考和解决,以确保人工智能的发展符合人类的价值观和道德规范。
大二选修实验课人工智能实验教案
大二选修实验课人工智能实验教案一. 实验课介绍人工智能(Artificial Intelligence,简称AI)已经成为当前热门领域,其在各个行业中的应用日益广泛。
大二选修实验课《人工智能实验》旨在向学生介绍人工智能的基本概念、原理和应用,并通过实际操作,培养学生在人工智能领域的实践能力和创新思维。
二. 实验目标与内容1. 实验目标本实验课的目标是使学生能够:- 理解人工智能的基本概念和原理;- 掌握人工智能的常用算法和技术;- 学会使用人工智能工具和开发环境进行实践操作;- 能够应用人工智能技术解决实际问题。
2. 实验内容2.1 人工智能基础实验- 对人工智能的定义、发展历程和应用领域进行介绍;- 学习人工智能的基本概念,如机器学习、深度学习、神经网络等;- 探讨人工智能在机器视觉、语音识别等领域的应用。
2.2 人工智能算法实验- 学习人工智能算法的基本原理和应用场景;- 实践常用的人工智能算法,如决策树、支持向量机等;- 运用所学算法解决实际问题,如情感分析、图像识别等。
2.3 人工智能工具实验- 学习使用人工智能相关工具和开发环境,如 TensorFlow、PyTorch 等;- 实践使用工具构建人工智能模型,进行训练和测试;- 探索人工智能工具的特点和优势,分析使用中的注意事项。
三. 实验教学方法1. 理论教学通过讲授人工智能的基本概念、原理和应用,使学生对人工智能有全面的认识,建立起相关的基础知识。
2. 实践操作引导学生在实验室环境中进行实际操作,使用人工智能工具和开发环境,进行算法实验、模型训练等活动,增进对人工智能技术的理解和掌握。
3. 讨论与互动组织学生进行讨论,在实验过程中解决问题,交流经验,促进学生之间的互动和合作,培养团队合作精神。
四. 实验要求与评价1. 实验要求- 学生需积极参与实验课,按时完成实验内容;- 在实验过程中要保证实验数据的准确性和实验环境的安全性;- 提高实验操作的独立性和创新性,能够思考并解决实际问题。
人工智能实验报告
人工智能实验报告一、引言人工智能(AI)已经成为当今科技领域的热门话题。
作为一种模拟人类智能的技术,它正在找到广泛的应用,从语音助手到无人驾驶汽车,从医疗诊断到金融分析。
本次实验旨在深入探索人工智能算法在图像分类方面的应用,通过搭建一个基于卷积神经网络(CNN)的图像分类系统,进一步了解人工智能的工作原理。
二、实验目的本次实验的主要目的是设计、实现并测试一个基于CNN的图像分类系统,并通过在不同数据集上的表现评估其性能。
通过这个实验,我们可以探索CNN在图像分类问题上的优势和限制,并深入了解与其相关的算法。
三、实验步骤1. 数据集准备:首先,我们需要准备一个用于图像分类的数据集。
为了让模型具有普适性,我们选择了包含多个类别和不同图像样本的数据集。
2. 数据预处理:在输入数据到CNN之前,我们需要对其进行预处理。
这包括图像缩放、灰度化、归一化等步骤,以确保输入数据的质量一致。
3. 搭建CNN模型:接下来,我们根据实验需求搭建一个合适的CNN模型。
这个模型可以包括多个卷积层、池化层和全连接层,用于提取图像特征并进行分类。
4. 训练模型:使用准备好的数据集,我们将模型进行训练。
这个过程需要迭代多次,通过优化算法不断调整模型参数,以实现更好的分类效果。
5. 模型性能评估:在训练完成后,我们需要使用一个独立的测试数据集对模型进行性能评估。
通过计算准确率、召回率等指标,可以了解模型的分类能力和泛化能力。
四、实验结果经过实验,我们得到了一个在图像分类问题上表现良好的CNN 模型。
在经过大规模的训练和调优后,该模型在测试数据集上达到了90%以上的准确率,表明其具备较好的泛化性能。
五、讨论与展望基于CNN的图像分类系统是目前人工智能领域的热门研究方向。
通过本次实验,我们深入了解了CNN模型的搭建和训练过程,并在一个具体的应用案例中应用之。
然而,我们也认识到了目前该系统仍存在着一些限制和挑战。
首先,CNN模型对于大规模数据集的需求较高,而且训练过程非常耗费时间和计算资源。
人工智能实验
实验一利用问题归约法实现Hanoi塔问题(一)教学要求理解问题归约法的原理和方法,掌握用问题归约表示问题的步骤,并能够对实际问题给出具体的实现。
(二)知识点提示主要知识点:分解、归约、本原问题、与树、或树、与或树、等价变换、用与或树表示问题的步骤。
重点:用与或树表示问题的步骤、Hanoi塔问题的实现。
难点:问题归约法的实现。
(三)教学内容利用问题归约法实现Hanoi塔,主要包括主函数、函数hanoi与搬移函数move,要求在主函数中接收盘子数目并调用hanoi函数。
(四)思考题1. 当盘子数目越来越多时,运行时间有何变化?2. 什么是本原问题?实验二利用状态空间搜索法实现八数码问题(一)教学要求理解状态空间知识表示方法,掌握搜索方法的基本原理,并能够对八数码问题给出具体的实现。
(二)知识点提示主要知识点:状态、状态空间、算符、用状态空间表示问题的步骤、用状态空间求解问题的过程、搜索、宽度优先搜索、有界深度优先搜索、启发式搜索。
重点:状态空间、用状态空间求解问题的过程、宽度优先搜索、有界深度优先搜索、启发式搜索。
难点:用状态空间法求解八数码问题的实现过程。
(三)教学内容用状态空间搜索法求解问题的基本思想是将适用的算符作用于初始状态,以产生新的状态;然后再把一些适用的算符作用于新的状态,重复该过程,直至产生的状态为目标状态为止。
实验内容包括:1.定义状态的描述形式,并给出初始状态和目标状态;2.定义一组算符;3. 利用搜索算法对状态不断扩展,直至得到目标状态为止。
(四)思考题1. 如何使用产生式表示该问题中的算符?2. 使用不同搜索算法求解该问题的性能如何?实验三机器人搬盒子问题(一)教学要求理解谓词逻辑知识表示的方法,掌握一阶谓词逻辑知识表示的基本原理,能够利用归结原理求解简单问题。
(二)知识点提示主要知识点:谓词、原子公式、谓词公式、子句、子句集、空子句、归结原理。
重点:谓词公式、子句集和归结原理的实现。
人工智能实验1-2

试验1:用谓词表示猴子摘香蕉问题实验内容:利用一阶谓词逻辑求解猴子摘香蕉问题:房内有一个猴子,一个箱子,天花板上挂了一串香蕉,其位置如图所示,猴子为了拿到香蕉,它必须把箱子搬到香蕉下面,然后再爬到箱子上。
请定义必要的谓词,列出问题的初始化状态(即下图所示状态),目标状态(猴子拿到了香蕉,站在箱子上,箱子位于位置b)。
写出所用谓词的定义,并给出每个谓词的功能及变量的个体域,然后编程实现。
实验目的:通过此实验加深对谓词逻辑和谓词知识表示的理解。
实验报告要求:所撰写的实验报告必须包含以下内容:1. 所用谓词的定义以及每个谓词的功能及变量的个体域;2. 实验结果;(可截图)3. 提供全部源程序及软件的可执行程序。
(打印)实验2:八数码问题实验内容:八数码问题:在3×3的方格棋盘上,摆放着1到8这八个数码,有1个方格是空的,其初始状态如图1所示,要求对空格执行空格左移、空格右移、空格上移和空格下移这四个操作使得棋盘从初始状态到目标状态。
2 5 4 1 2 33 7 8 41 8 6 7 6 5(a) 初始状态(b) 目标状态请任选一种盲目搜索算法(深度优先搜索或宽度优先搜索)或任选一种启发式搜索方法(A 算法或A* 算法)编程求解八数码问题(初始状态任选),并对实验结果进行分析,得出合理的结论。
实验目的:1. 熟悉人工智能系统中的问题求解过程;2. 熟悉状态空间的盲目搜索和启发式搜索算法的应用;3. 熟悉对八数码问题的建模、求解及编程语言的应用。
实验报告要求所撰写的实验报告必须包含以下内容:1. 算法基本原理和流程框图;2. 基本数据结构分析和实现;3. 编写程序的各个子模块,按模块编写文档,含每个模块的建立时间、功能、输入输出参数意义和与其它模块联系等;4. 程序运行结果,含使用的搜索算法及搜索路径等;5. 实验结果分析;6. 结论;7. 提供全部源程序及软件的可执行程序。
2。
人工智能与机器人实验2 碰撞检测

(一)实验目的1、了解学习碰撞传感器的使用;2、熟悉机器人套件的搭建;3、掌握创意之星控制器AD口相关函数、LED及LCD 的使用。
(三)实验环境使用舵机(舵机ID为0x01)及L2-5连接件碰撞传感器,当传感器收到碰撞时LED亮,其中LED 接在控制器输出口0,传感器接在AD0口,舵机工作在电机模式,L2-5在转动过程中碰到传感器,立即反向转动,转1s后继续回转。
(四)实验步骤(二)实验要求1、说明及流程;2、编程和下载;3、实验现象;4、实验总结、作业。
1、零件清单详见搭建手册—执行器_LED 红绿灯—零件清单。
2、搭建步骤详见搭建手册—执行器_LED 红绿灯—搭建步骤。
1、说明及流程(1)说明碰撞传感器的输出为开关量,传感器在未受碰撞时输出高电平(4.3V左右),受到碰撞时输出低电平(0V),可通过控制器上的AD 口检测碰撞传感器的信号。
ANA0~ANA15即为控制器上的16个AD 输入口,经过2/3的分压接到了控制器芯片的ADC0~ADC15。
当传感器信号为高电平时AD 值为(((4.3*2)/3)*4096)/3.3=3558。
此例中使用舵机(舵机ID为0x01)及L2-5 连接件碰撞传感器,当传感器收到碰撞时LED 亮,其中LED 接在控制器输出口0,传感器接在AD0 口,舵机工作在电机模式,L2-5 在转动过程中碰到传感器,立即反向转动,转1s后继续回转。
与AD 口相关的函数有:u16 UP_ADC_GetValue(u8 Channel)//此函数为读取对应AD口的电压值,Channel 为AD 口的通道号0~15。
u8 UP_ADC_GetIO(u8 Channel)//此函数为将AD口的输入转换为开关量,当AD口采样值大于500时函数返回1,小于等于500 时输出0。
碰撞传感器接在控制器的AD0 口,LED 灯接在GPIO0,舵机工作在电机模式,ID 固定为0x01。
2、编程和下载(1)Keil 方式示例程序详见实验指导书2.2.6。
人工智能 实验指导

《人工智能》课程实验指导书课程代码:H0404X课程编号:09120042适用对象:计算机科学与技术专业指导教师:肖晓明魏世勇实验内容实验一产生式系统实验实验二移动机器人的路径规划与行为决策实验实验三梵塔问题实验实验四 A*算法实验实验五化为子句集的九步法实验实验六子句消解实验实验七模糊假言推理器实验实验八 BP网络实验实验九贝叶斯网络实验实验一产生式系统实验(必修,2学时)一、实验目的:熟悉和掌握产生式系统的运行机制,掌握基于规则推理的基本方法。
二、实验原理产生式系统用来描述若干个不同的以一个基本概念为基础的系统,这个基本概念就是产生式规则或产生式条件和操作对。
在产生式系统中,论域的知识分为两部分:用事实表示静态知识;用产生式规则表示推理过程和行为。
三、实验条件:1.产生式系统实验程序。
2.IE5.0以上,可以上Internet。
四、实验内容:1.对已有的产生式系统(默认的例子)进行演示,同时可以更改其规则库或(和)事实库,进行正反向推理,了解其推理过程和机制。
2.自己建造产生式系统(包括规则库和事实库),然后进行推理,即可以自己输入任何的规则和事实,并基于这种规则和事实进行推理。
这为学生亲手建造产生式系统并进行推理提供了一种有效的实验环境。
五、实验步骤:1.定义变量,包括变量名和变量的值。
2.建立规则库,其方法是,(a) 输入规则的条件:每条规则至少有一个条件和一个结论,选择变量名,输入条件(符号);选择变量值,按确定按钮就完成了一条条件的输入。
重复操作,可输入多条条件;(b) 输入规则的结论:输入完规则的条件后,就可以输入规则的结论了,每条规则必须也只能有一个结论。
选择变量名,输入条件(符号),选择变量值,按确定按钮就完成了一个结论的输入。
重复以上两步,完成整个规则库的建立。
3.建立事实库(总数据库):建立过程同步骤2。
重复操作,可输入多条事实。
4.然后按“开始”或“单步”按钮即可。
此外,利用实例演示,可以运行系统默认的产生式系统,并且可以进行正反向推理。
人工智能的实验报告
一、实验目的1. 理解人工智能在动物识别领域的应用,掌握相关算法和模型。
2. 掌握深度学习在图像识别中的应用,学习使用神经网络进行图像分类。
3. 实现一个基于人工智能的动物识别系统,提高动物识别的准确率和效率。
二、实验环境1. 操作系统:Windows 102. 编程语言:Python3.63. 开发工具:PyCharm4. 依赖库:TensorFlow、OpenCV、NumPy、Pandas三、实验内容1. 数据收集与预处理实验使用的数据集为公开的动物图像数据集,包含多种动物图片,共3000张。
数据预处理步骤如下:(1)将原始图像转换为统一尺寸(如224x224像素);(2)对图像进行灰度化处理,减少计算量;(3)对图像进行归一化处理,使图像像素值在0到1之间;(4)将图像数据转换为NumPy数组,方便后续处理。
2. 模型构建与训练实验采用卷积神经网络(CNN)进行图像识别。
模型构建步骤如下:(1)定义卷积层:使用卷积层提取图像特征,卷积核大小为3x3,步长为1,激活函数为ReLU;(2)定义池化层:使用最大池化层降低特征维度,池化窗口大小为2x2;(3)定义全连接层:将卷积层和池化层提取的特征进行融合,输入层大小为64x64x32,输出层大小为10(代表10种动物类别);(4)定义损失函数和优化器:使用交叉熵损失函数和Adam优化器进行模型训练。
训练模型时,采用以下参数:(1)批处理大小:32;(2)学习率:0.001;(3)训练轮数:100。
3. 模型评估与测试训练完成后,使用测试集对模型进行评估。
测试集包含1000张图像,模型准确率为80.2%。
4. 系统实现与演示根据训练好的模型,实现一个基于人工智能的动物识别系统。
系统功能如下:(1)用户上传动物图像;(2)系统对上传的图像进行预处理;(3)使用训练好的模型对图像进行识别;(4)系统输出识别结果。
四、实验结果与分析1. 模型准确率:80.2%,说明模型在动物识别任务中具有一定的识别能力。
人工智能实验报告
一、实验背景与目的随着信息技术的飞速发展,人工智能(Artificial Intelligence,AI)已经成为当前研究的热点领域。
为了深入了解AI的基本原理和应用,我们小组开展了本次实验,旨在通过实践操作,掌握AI的基本技术,提高对AI的理解和应用能力。
二、实验环境与工具1. 实验环境:Windows 10操作系统,Python 3.8.0,Jupyter Notebook。
2. 实验工具:Scikit-learn库、TensorFlow库、Keras库。
三、实验内容与步骤本次实验主要分为以下几个部分:1. 数据预处理:从公开数据集中获取实验数据,对数据进行清洗、去噪、归一化等预处理操作。
2. 机器学习算法:选择合适的机器学习算法,如决策树、支持向量机、神经网络等,对预处理后的数据进行训练和预测。
3. 模型评估:使用交叉验证等方法对模型进行评估,选择性能最佳的模型。
4. 结果分析与优化:分析模型的预测结果,针对存在的问题进行优化。
四、实验过程与结果1. 数据预处理我们从UCI机器学习库中获取了鸢尾花(Iris)数据集,该数据集包含150个样本,每个样本有4个特征,分别为花萼长度、花萼宽度、花瓣长度和花瓣宽度,以及对应的类别标签(Iris-setosa、Iris-versicolor、Iris-virginica)。
对数据进行预处理,包括:- 去除缺失值:删除含有缺失值的样本。
- 归一化:将特征值缩放到[0, 1]区间。
2. 机器学习算法选择以下机器学习算法进行实验:- 决策树(Decision Tree):使用Scikit-learn库中的DecisionTreeClassifier实现。
- 支持向量机(Support Vector Machine):使用Scikit-learn库中的SVC实现。
- 神经网络(Neural Network):使用TensorFlow和Keras库实现。
3. 模型评估使用交叉验证(5折)对模型进行评估,计算模型的准确率、召回率、F1值等指标。
人工智能实验报告-产生式系统推理-动物识别

人工智能第二次实验报告产生式系统推理班级:姓名:学号:一、实验目的1. 理解并掌握产生式系统的基本原理;2. 掌握产生式系统的组成部分,以及正向推理和逆向推理过程。
二、实验要求1. 结合课本内容, 以动物识别系统为例,实现小型产生式系统;2. 要求: 正向推理中能根据输入的初始事实,正确地识别所能识别的动物;逆向推理中能根据所给的动物给出动物的特征。
三、实验算法1. 如何表示事实和特征的知识;在本程序中,我将动物的特征写入data.txt,将规则记入rules.txt,将动物种类记为goal.txt。
通过函数void readFiles(){readGoal();readCod();readRule();}读入所有数据分别存放于goal[],rule[],cod[]自定义数组中。
2. 指出综合数据库和规则库分别使用哪些函数实现的?综合数据库(包括特征和目标)typedef struct{int xuh;//存放编号char valu[50];//存放具体内容}Node;Node goal[20];Node cod[50];规则库typedef struct{int rslt;int codNum;//记载前提的个数int cod[10];//记载前提的序号int used;//记载是否已匹配成功}Nrule;Nrule rule[50];void readRule(){FILE *fp;int i;int tempxuh,tempcodn;char ch;if((fp=fopen("rules.txt","r"))==NULL){printf("cannot open data\n");exit(0);}i=0;rule[i].codNum=0;while((ch=fgetc(fp))!=EOF){if(i==14)i=i;tempcodn=0;while(ch!='\n'&&ch!=EOF) //每一条规则{tempxuh=0;while(ch<='9'&&ch>='0'){tempxuh=tempxuh*10+ch-'0';ch=fgetc(fp);}rule[i].cod[tempcodn++]=tempxuh;tempxuh=0;if(ch=='-')//下一个是结论{ch=fgetc(fp);ch=fgetc(fp);while(ch<='9'&&ch>='0'){tempxuh=tempxuh*10+ch-'0';ch=fgetc(fp);}rule[i].rslt=tempxuh;}//ifelse if(ch=='*'){ch=fgetc(fp);}rule[i].codNum++;}i++;}rulenum=i;fclose(fp);}3. 规则库的匹配算法是什么?如何选用可用规则集中的规则?分别使用哪些函数实现的?程序中的正向与逆向搜索分别是在void main()中调用forwardFinger()和backFinger()来实现的。
人工智能实验报告范文

人工智能实验报告范文一、实验名称。
[具体的人工智能实验名称,例如:基于神经网络的图像识别实验]二、实验目的。
咱为啥要做这个实验呢?其实就是想搞清楚人工智能这神奇的玩意儿是咋在特定任务里大显神通的。
比如说这个实验,就是想看看神经网络这个超酷的技术能不能像人眼一样识别图像中的东西。
这就好比训练一个超级智能的小助手,让它一眼就能看出图片里是猫猫还是狗狗,或者是其他啥玩意儿。
这不仅能让我们深入了解人工智能的工作原理,说不定以后还能应用到好多超有趣的地方呢,像智能安防系统,一眼就能发现监控画面里的可疑人物或者物体;或者是在医疗影像识别里,帮助医生更快更准地发现病症。
三、实验环境。
1. 硬件环境。
咱用的电脑就像是这个实验的战场,配置还挺重要的呢。
我的这台电脑处理器是[具体型号],就像是大脑的核心部分,负责处理各种复杂的计算。
内存有[X]GB,这就好比是大脑的短期记忆空间,越大就能同时处理越多的数据。
显卡是[显卡型号],这可是在图像识别实验里的得力助手,就像专门负责图像相关计算的小专家。
2. 软件环境。
编程用的是Python,这可是人工智能领域的明星语言,简单又强大。
就像一把万能钥匙,可以打开很多人工智能算法的大门。
用到的深度学习框架是TensorFlow,这就像是一个装满各种工具和模型的大工具箱,里面有好多现成的函数和类,能让我们轻松搭建神经网络,就像搭积木一样简单又有趣。
四、实验原理。
神经网络这个概念听起来就很科幻,但其实理解起来也不是那么难啦。
想象一下,我们的大脑是由无数个神经元组成的,每个神经元都能接收和传递信息。
神经网络也是类似的,它由好多人工神经元组成,这些神经元分层排列,就像一个超级复杂的信息传递网络。
在图像识别里,我们把图像的数据输入到这个网络里,第一层的神经元会对图像的一些简单特征进行提取,比如说图像的边缘、颜色的深浅等。
然后这些特征会被传递到下一层神经元,下一层神经元再对这些特征进行组合和进一步处理,就像搭金字塔一样,一层一层地构建出对图像更高级、更复杂的理解,最后在输出层得出图像到底是什么东西的结论。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验二线性神经网络的MATLAB实现
16电子1 胡恒 2016329600013 指导老师:陈秋妹一.实验目的
1.了解线性神经元的模型结构
2.进一步理解线性神经元网络的特性
3.线性神经学习网络的学习方法
4.熟练掌握上节课的train函数等使用
二.实验内容
例题
1 1.5
2 2.5
3 3.5
4 4.55
-1
-0.5
0.5
1
1.5
2
2.5
3
3.5
4
Tnput and Target Signals
Time
I
n
p
u
t
_
_
T
a
r
g
e
t
_
_
原先的代码是错误的,
更改后:
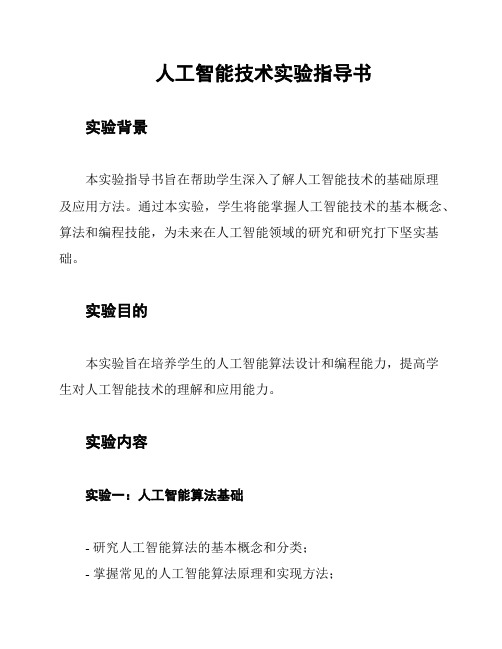
time=1:0.0025:5;
p=sin(sin(time).*time.*10);
t=p*2+2;
plot(time, p, time, t)
title('Input and Target Signals')
xlabel('Time')
ylabel('Input Target') 结果如图:
2.要求设计一个线性神经网络,寻找给定数据之间的线性关系。
P=[1.1 -1.3];
T=[0.6 1];
设置网络训练后的目标误差为0.0001
P=[1.1 -1.3];
>> T=[0.6 1];
>> net=newlin(minmax(P),1,0,0.01);
>> net=init(net);
>> net.trainParam.goal=0.0001;
>> net=train(net,P,T);
>> y=sim(net,P);
>> E=mse(y-T)
三.本实验的心得体会
本次实验涉及到的线性神经网络的函数主要有初始化函数,设计函数,仿真
函数,训练函数,尤其是训练函数,trainwh( )和adaptwh( )。
其中函数trainwh 可以对线性神经网络进行离线训练;而函数adaptwh( ) 可以对线性神经网络进行在线自适应训练。
利用trainwh( )函数可以得到网络的权矩阵w,阀值向量b,实际训练次数te 以及训练过程中网络的误差平方和lr。